Изобретение относится к измерительной технике, в частности к разработке методов повышения точности измерений при воздействии мешающих факторов (изменение температуры, электрические помехи, изменение напряжения питания и т.д.). Оно может быть использовано в устройствах с тензометрическими мостовыми датчиками, подключенными к инструментальным усилителям и запитанными постоянным током при измерении физических параметров.
Известен ряд методов, способствующих получению достоверных результатов измерения при воздействии мешающих факторов, например «Способ калибровки измерительных систем» патент РФ №2262713 МПК G01R 35/00, «Способ градуировки измерительных каналов тензометрических систем» патент РФ №2006789 МПК G01B 7/18.
Указанные способы предполагают создание образцовых сигналов разных уровней и проведение на их основе методом аппроксимации процедуры коррекции градуировочных характеристик измерительного канала.
Недостатком приведенных способов является необходимость большого объема вычислительных операций, что значительно снижает быстродействие измерительных устройств.
Наиболее близким (прототипом) предлагаемого способа является способ, приведенный в учебном пособии для вузов «Измерение электрических и неэлектрических величин» авторы Н.Н.Евтихеев, Я.А.Купершмидт и др. под общей редакцией Н.Н.Евтихеева М.: Энергоатомиздат, 1989 г. (с.120-123).
Известный способ основан на наличии двух идентичных измерительных цепей. По одной из которых проходит измерительный рабочий сигнал, а по другой - эталонный сигнал. Затем операциями вычитания и деления из измерительного сигнала удаляются систематические аддитивные и мультипликативные погрешности.
Недостатком данного способа является наличие двух измерительных каналов, абсолютно одинаковые характеристики которых труднодостижимы по причине необходимости полной идентичности элементов их составляющих и внешних воздействий, в которых они находятся, нарушение перечисленных условий вносят искажения в процедуру исключения указанных погрешностей, что приводит к снижению точности измерения.
В предлагаемом способе используется только один измерительный канал, который периодически переводится в режим измерения величин аддитивных и мультипликативных составляющих систематической погрешности, а затем в режиме штатных измерений посредством операций вычитания и деления производится очищение рабочего измерительного сигнала от названных выше погрешностей. Техническим результатом изобретения является повышение точности измерений.
Указанный технический результат достигается тем, что в способ коррекции результатов измерения тензометрическим мостовым датчиком с инструментальным усилителем, запитанным однополярным постоянным напряжением, вводится режим контроля систематических аддитивных и мультипликативных погрешностей, с дальнейшим исключением их из результатов измерений посредством операций вычитания и деления, для чего периодически измерительную диагональ тензометрического мостового датчика по первому управляющему сигналу отключают от дифференциального входа инструментального усилителя, корректирующий вход инструментального усилителя соединяют с шиной «земля», замыкают дифференциальный вход инструментального усилителя и соединяют с шиной "земля", сигнал с выхода инструментального усилителя, равный Δади·(К+ΔK), где Δади - аддитивная систематическая погрешность инструментального усилителя,
K - коэффициент усиления инструментального усилителя,
ΔK - систематическая мультипликативная погрешность инструментального усилителя, запоминают в первом запоминающем устройстве, затем по второму управляющему сигналу размыкают дифференциальный вход инструментального усилителя и подключают к нему напряжение питания Un тензометрического мостового датчика, которое предварительно делят на первом делителе на коэффициент M>>1, выбранный из условия функционирования инструментального усилителя в рабочем диапазоне, выходной сигнал с инструментального усилителя, равный  , подают на положительный вход первого сумматора, где из него вычитают величину Δади·(K+ΔK), которую подают на отрицательный вход первого сумматора с выхода первого запоминающего устройства, полученный сигнал
, подают на положительный вход первого сумматора, где из него вычитают величину Δади·(K+ΔK), которую подают на отрицательный вход первого сумматора с выхода первого запоминающего устройства, полученный сигнал  умножают на коэффициент M>>1 и величину Un·(K+ΔK) запоминают во втором запоминающем устройстве, затем величину Un·(K+ΔK), взятую с выхода второго запоминающего устройства, на втором делителе делят на величину напряжения питания тензометрического мостового датчика Un, и получившуюся величину (К+ΔK) с выхода второго делителя подают на вторые входы третьего и четвертого делителей, после этого, по третьему управляющему сигналу прекращают подачу сигнала
умножают на коэффициент M>>1 и величину Un·(K+ΔK) запоминают во втором запоминающем устройстве, затем величину Un·(K+ΔK), взятую с выхода второго запоминающего устройства, на втором делителе делят на величину напряжения питания тензометрического мостового датчика Un, и получившуюся величину (К+ΔK) с выхода второго делителя подают на вторые входы третьего и четвертого делителей, после этого, по третьему управляющему сигналу прекращают подачу сигнала  с выхода первого делителя на дифференциальный вход инструментального усилителя, корректирующий вход инструментального усилителя соединяют с источником напряжения смещения выходного сигнала инструментального усилителя Uсм, вершину высокого потенциала питающей диагонали тензометрического мостового датчика отключают от напряжения питания Un, и соединяют с шиной "земля", тем самым обесточивают тензометрический мостовой датчик и на его выходе оставляют лишь систематическую аддитивную составляющую погрешности, равную Δадд, создаваемую внешними мешающими факторами, эту погрешность подают на вход инструментального усилителя и на его выходе получают сигнал Δад(К+ΔK)+Uсм, где Δад=Δадд+Δади, который записывают в третье запоминающее устройство, с выхода этого устройства сигнал Δад(K+ΔK)+Uсм подают на прямой вход второго сумматора, на инверсный вход второго сумматора подают сигнал Uсм, в результате чего на его выходе получают сигнал Δад(K+ΔK), этот сигнал посылают на вход третьего делителя в качестве делимого, чем на выходе третьего делителя формируют сигнал Δад, который подают на инверсный вход третьего сумматора, после этого, по четвертому управляющему сигналу, на питающую диагональ тензометрического мостового датчика подают напряжение питания Un, в результате на измерительной диагонали, т.е на выходе тензометрического мостового датчика, получают рабочий измерительный сигнал, равный
с выхода первого делителя на дифференциальный вход инструментального усилителя, корректирующий вход инструментального усилителя соединяют с источником напряжения смещения выходного сигнала инструментального усилителя Uсм, вершину высокого потенциала питающей диагонали тензометрического мостового датчика отключают от напряжения питания Un, и соединяют с шиной "земля", тем самым обесточивают тензометрический мостовой датчик и на его выходе оставляют лишь систематическую аддитивную составляющую погрешности, равную Δадд, создаваемую внешними мешающими факторами, эту погрешность подают на вход инструментального усилителя и на его выходе получают сигнал Δад(К+ΔK)+Uсм, где Δад=Δадд+Δади, который записывают в третье запоминающее устройство, с выхода этого устройства сигнал Δад(K+ΔK)+Uсм подают на прямой вход второго сумматора, на инверсный вход второго сумматора подают сигнал Uсм, в результате чего на его выходе получают сигнал Δад(K+ΔK), этот сигнал посылают на вход третьего делителя в качестве делимого, чем на выходе третьего делителя формируют сигнал Δад, который подают на инверсный вход третьего сумматора, после этого, по четвертому управляющему сигналу, на питающую диагональ тензометрического мостового датчика подают напряжение питания Un, в результате на измерительной диагонали, т.е на выходе тензометрического мостового датчика, получают рабочий измерительный сигнал, равный
 ,
,
где
R - сопротивление тензорезисторов мостового датчика,
ΔR - изменение сопротивлений тензорезисторов при изменении измеряемых физических параметров,
этот сигнал подают на дифференциальный вход инструментального усилителя, в котором его преобразуют в сигнал  +Uсм, полученный сигнал с выхода инструментального усилителя посылают на прямой вход четвертого сумматора, на инверсный вход которого подают сигнал Uсм, на выходе четвертого сумматора получают сигнал
+Uсм, полученный сигнал с выхода инструментального усилителя посылают на прямой вход четвертого сумматора, на инверсный вход которого подают сигнал Uсм, на выходе четвертого сумматора получают сигнал  , этот сигнал подают на первый вход четвертого делителя в качестве делимого, на выходе четвертого делителя получают сигнал
, этот сигнал подают на первый вход четвертого делителя в качестве делимого, на выходе четвертого делителя получают сигнал  , этот сигнал посылают на прямой вход третьего сумматора, на выходе которого формируют сигнал
, этот сигнал посылают на прямой вход третьего сумматора, на выходе которого формируют сигнал  , этот сигнал подают на первый вход пятого делителя в качестве делимого, на второй вход этого делителя подают сигнал Un так, что на выходе пятого делителя, т.е. на выходе измерительного устройства, получают сигнал
, этот сигнал подают на первый вход пятого делителя в качестве делимого, на второй вход этого делителя подают сигнал Un так, что на выходе пятого делителя, т.е. на выходе измерительного устройства, получают сигнал  , очищенный от систематических погрешностей, возникших в линиях связи тензометрического мостового датчика и инструментального усилителя, причем переключения с режима измерения аддитивных и мультипликативных погрешностей на рабочий режим измерений производят через заданные интервалы изменения температуры элементов измерительного канала, например датчика, или через заданные промежутки времени.
, очищенный от систематических погрешностей, возникших в линиях связи тензометрического мостового датчика и инструментального усилителя, причем переключения с режима измерения аддитивных и мультипликативных погрешностей на рабочий режим измерений производят через заданные интервалы изменения температуры элементов измерительного канала, например датчика, или через заданные промежутки времени.
На фигуре схематически показана структура устройства, реализующего предложенный способ.
Измерительное устройство состоит из тензометрического мостового датчика (тензорезисторы 1, 2, 3, 4), двенадцати коммутирующих ключей (5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16), инструментального усилителя 17, пяти делителей (18, 19, 20, 21, 22), устройства умножения 23, трех запоминающих устройств (24, 25, 26) и четырех сумматоров (27, 28, 29, 30).
Перекидной ключ 5 соединяет с вершиной высокого потенциала питающей диагонали тензометрического мостового датчика (общая точка соединения резисторов 1 и 3) либо источник питания, либо шину "земля". Вершина нулевого потенциала питающей диагонали тензометрического мостового датчика (общая точка соединения резисторов 2 и 4) соединена с шиной «земля». Вершины измерительной диагонали тензометрического мостового датчика (общие точки соединения резисторов 1, 2 и 3, 4) соединены через ключи 6, 7 с дифференциальным входом инструментального усилителя 17. Положительный вход инструментального усилителя 17 через ключ 8 и первый делитель 18 соединен с источником питания тензометрического мостового датчика Un. Инверсный вход инструментального усилителя 17 через ключ 9 соединен с шиной «земля». Между дифференциальными входами усилителя 17 расположен ключ 16. Корректирующий вход инструментального усилителя 17 через перекидной ключ 10 соединяют или с источником напряжения смещения Uсм выходного сигнала инструментального усилителя 17, или с шиной «земля». Выход инструментального усилителя 17 через ключи 11, 12, 15, 13 соответственно соединен с положительным входом первого сумматора 30, входами запоминающих устройств 25, 26 и прямым входом четвертого сумматора 27. Отрицательный вход сумматора 30 соединен с выходом первого запоминающего устройства 26. Выход первого сумматора 30 соединен с входом устройства умножения 23. Инверсный вход четвертого сумматора 27 подключен к источнику напряжения смещения выходного сигнала инструментального усилителя Uсм, а выход - к первому входу четвертого делителя 21. Выход третьего запоминающего устройства 25 соединен с прямым входом второго сумматора 29. Инверсный вход сумматора 29 связан с источником напряжения смещения выходного сигнала инструментального усилителя Uсм, а выход сумматора 29 соединен с первым входом третьего делителя 20. Выход устройства умножения 23 через второе запоминающее устройство 24 соединен с первым входом второго делителя 19. Второй вход делителя 19 соединен с источником питания Un. Выход делителя 19 соединен со вторыми входами третьего и четвертого делителей 20, 21. Выход третьего делителя 20 соединен с инверсным входом третьего сумматора 28. Выход четвертого делителя 21 соединен через ключ 14 с прямым входом третьего сумматора 28. При этом выход сумматора 28 связан с первым входом пятого делителя 22, на второй вход которого подано напряжение питания тензометрического мостового датчика Un. Выход делителя 22 является выходом измерительного устройства.
Реализуется предлагаемый способ следующим образом. Режим контроля погрешностей производится в два этапа. На первом этапе определяют и запоминают фактический коэффициент усиления инструментального усилителя при существующих в данный момент мешающих факторах. Для этого перекидной ключ 5 замыкают на шину "земля", а ключи 6, 7, 8, 11, 12, 13, 14 размыкают. Перекидным ключом 10 отключают напряжение смещения Uсм и соединяют корректирующий вход инструментального усилителя с шиной «земля». Ключи 9, 15, 16 замыкают. В результате проведенных переключений дифференциальный вход инструментального усилителя закорочен и соединен с шиной «земля». На выходе инструментального усилителя получают сигнал Δади·(K+ΔK), который запоминают в первом запоминающем устройстве 26. Затем ключи 15, 16 размыкают и замыкают ключи 8, 11. На вход инструментального усилителя подают сигнал Un/M (при Un=5 B коэффициент M≈250). На выходе инструментального усилителя 17 получают сигнал  . Этот сигнал подают на прямой вход первого сумматора 30, т.к. на инверсном входе этого сумматора находится сигнал Δади·(K+ΔK), то на выходе сумматора 30 получают сигнал Un(K+ΔK)/M.
. Этот сигнал подают на прямой вход первого сумматора 30, т.к. на инверсном входе этого сумматора находится сигнал Δади·(K+ΔK), то на выходе сумматора 30 получают сигнал Un(K+ΔK)/M.
На устройстве умножения 23 этот сигнал преобразуют в форму Un·(K+ΔK). Далее этот сигнал запоминают во втором запоминающем устройстве 24 и подают на первый вход второго делителя 19, где его преобразуют в вид (K+ΔK). Далее сигнал (K+ΔK) подают в качестве делителя на входы третьего и четвертого делителей 20, 21. На этом этап определения систематической мультипликативной погрешности завершают. После этого осуществляют второй этап режима контроля для определения аддитивной погрешности, для этого ключи 8, 9, 11 размыкают. Ключи 6, 7, 12 замыкают. Перекидным ключом 10 соединяют корректирующий вход инструментального усилителя 17 с источником напряжения смещения Uсм. Перекидной ключ 5 соединяют с шиной "земля". Тем самым обесточенный тензометрический мостовой датчик подключают к инструментальному усилителю 17. На выходе инструментального усилителя 17 получают сигнал Δад·(K+ΔK)+Uсм. Этот сигнал через замкнутый ключ 12 записывают в третье запоминающее устройство 25. С выхода устройства 25 сигнал Δад·(K+ΔK)+Uсм подают на прямой вход второго сумматора 29. На инверсный вход сумматора 29 подают сигнал Uсм. На выходе сумматора 29 получают сигнал Δад·(K+ΔK). Этот сигнал подают на первый вход третьего делителя 20. На выходе делителя 20 формируют сигнал Δад. Этот сигнал подают на инверсный вход третьего сумматора 28. На этом режим контроля погрешностей заканчивают и начинают режим рабочих измерений. Ключ 12 размыкают. Ключи 6, 7 замыкают. Ключи 8, 9, 11, 15, 16 размыкают. Ключи 5 замыкают на источник питания, ключи 13, 14 замыкают, перекидным ключом 10, подключают напряжение смещения Uсм к корректирующему входу инструментального усилителя 17. Сигнал Un·ΔR/R+Δадд с измерительной диагонали тензометрического мостового датчика подают на дифференциальный вход инструментального усилителя 17. На выходе инструментального усилителя 17 получают сигнал (Un·ΔR/R+Δад)·(K+ΔK)+Uсм. Этот сигнал через ключ 13 подают на прямой вход четвертого сумматора 27. На инверсный вход сумматора 27 подают сигнал Uсм. На выходе сумматора 27 получают сигнал (Un·ΔR/R+Δад)·(K+ΔK), который подают на первый вход четвертого делителя 21. Так как на втором входе этого делителя уже присутствует сигнал (K+ΔK), то на выходе делителя 21 получают сигнал Un·ΔR/R+Δад. Этот сигнал через замкнутый ключ 14 подают на прямой вход сумматора 28 и на выходе сумматора 28 получают сигнал Un·ΔR/R. Сигнал Un·ΔR/R - это сигнал с выхода измерительной диагонали тензометрического мостового датчика без систематических аддитивной и мультипликативной погрешностей. Далее этот сигнал подают на первый вход делителя 22, а на второй вход этого делителя подают напряжение питания тензометрического мостового датчика Un. На выходе делителя 22 получают полезный сигнал ΔR/R, очищенный от систематических погрешностей.
Переключение с режима измерения аддитивных и мультипликативных погрешностей на режим рабочих измерений производят устройством управления ключами через заданный интервал изменения температуры или заданный промежуток времени.
Устройство управления ключами на фигуре не приведено.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2011 |
|
RU2469341C1 |
| СПОСОБ КОРРЕКЦИИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ ТЕНЗОМЕТРИЧЕСКИМ МОСТОВЫМ ДАТЧИКОМ С ИНСТРУМЕНТАЛЬНЫМ УСИЛИТЕЛЕМ | 2011 |
|
RU2469344C1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2011 |
|
RU2469339C1 |
| СПОСОБ КОРРЕКЦИИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ ТЕНЗОМЕТРИЧЕСКИМ МОСТОВЫМ ДАТЧИКОМ С ИНСТРУМЕНТАЛЬНЫМ УСИЛИТЕЛЕМ | 2011 |
|
RU2468334C1 |
| СПОСОБ КОРРЕКЦИИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ ТЕНЗОМЕТРИЧЕСКОГО МОСТОВОГО ДАТЧИКА С ИНСТРУМЕНТАЛЬНЫМ УСИЛИТЕЛЕМ | 2011 |
|
RU2469262C1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2011 |
|
RU2477865C2 |
| МНОГОКАНАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО АЭРОДИНАМИЧЕСКИХ ВНУТРИМОДЕЛЬНЫХ ВЕСОВ | 2011 |
|
RU2469283C1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2011 |
|
RU2469338C1 |
| Тензометрическое устройство | 1989 |
|
SU1793199A1 |
| Тензометрическое устройство | 1991 |
|
SU1796889A1 |
Изобретение относится к области измерительной техники и может быть использовано для измерения неэлектрических величин при помощи тензометрических мостовых датчиков с инструментальными усилителями, запитанных постоянным током. Техническим результатом изобретения является исключение систематических аддитивных и мультипликативных составляющих погрешностей, входящих в рабочий измерительный сигнал. Это достигается тем, что периодически по сигналам командного блока определяют аддитивную и мультипликативную составляющие погрешности, для чего вершину высокого потенциала диагонали питания тензометрического мостового датчика отключают от источника питания и с выхода инструментального усилителя величины аддитивной и мультипликативной погрешностей записывают запоминающие устройства, затем производят штатные рабочие измерения при включенном питании моста и из величины сигнала, измеренного в штатном режиме, устраняют ранее запомненные величины аддитивной и мультипликативной составляющих погрешностей. Переключение с режима определения величины аддитивной и мультипликативной составляющих погрешностей на штатный режим измерения производится блоком управления через заданный интервал изменения температуры элементов измерительного канала, например, датчика или заданный промежуток времени. 1 ил.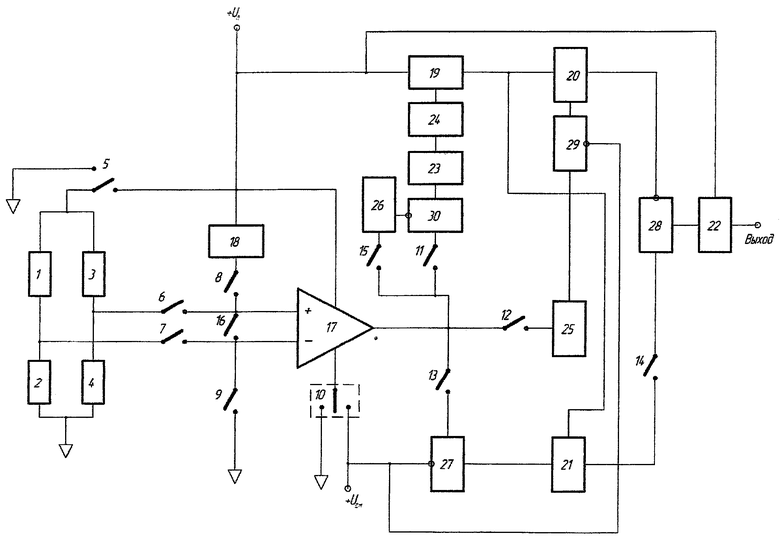
Способ коррекции результатов измерений тензометрического мостового датчика с инструментальным усилителем, запитанных однополярным постоянным током, основанный на исключении посредством операций вычитания и деления систематических аддитивных и мультипликативных погрешностей, возникающих в измерительной цепи, отличающийся тем, что периодически измерительную диагональ тензометрического мостового датчика по первому управляющему сигналу отключают от дифференциального входа инструментального усилителя, корректирующий вход инструментального усилителя соединяют с шиной «земля», замыкают дифференциальный вход инструментального усилителя и соединяют с шиной "земля", сигнал с выхода инструментального усилителя, равный Δади·(K+ΔK), где Δади - аддитивная систематическая погрешность инструментального усилителя,
К - коэффициент усиления инструментального усилителя,
ΔК - систематическая мультипликативная погрешность инструментального усилителя,
запоминают в первом запоминающем устройстве, затем по второму управляющему сигналу размыкают дифференциальный вход инструментального усилителя и подключают к нему напряжение питания Uп тензометрического мостового датчика, которое предварительно делят на первом делителе на коэффициент М>>1, выбранный из условия функционирования инструментального усилителя в рабочем диапазоне, выходной сигнал с инструментального усилителя, равный  , подают на положительный вход первого сумматора, где из него вычитают величину Δади·(K+ΔK), которую подают на отрицательный вход первого сумматора с выхода первого запоминающего устройства, полученный сигнал
, подают на положительный вход первого сумматора, где из него вычитают величину Δади·(K+ΔK), которую подают на отрицательный вход первого сумматора с выхода первого запоминающего устройства, полученный сигнал  умножают на коэффициент М>>1 и величину Uп·(K+ΔK) запоминают во втором запоминающем устройстве, затем величину Uп·(K+ΔK), взятую с выхода второго запоминающего устройства, на втором делителе делят на величину напряжения питания тензометрического мостового датчика Uп, и получившуюся величину (К+ΔК) с выхода второго делителя подают на вторые входы третьего и четвертого делителей, после этого по третьему управляющему сигналу прекращают подачу сигнала
умножают на коэффициент М>>1 и величину Uп·(K+ΔK) запоминают во втором запоминающем устройстве, затем величину Uп·(K+ΔK), взятую с выхода второго запоминающего устройства, на втором делителе делят на величину напряжения питания тензометрического мостового датчика Uп, и получившуюся величину (К+ΔК) с выхода второго делителя подают на вторые входы третьего и четвертого делителей, после этого по третьему управляющему сигналу прекращают подачу сигнала  с выхода первого делителя на дифференциальный вход инструментального усилителя, корректирующий вход инструментального усилителя соединяют с источником напряжения смещения выходного сигнала инструментального усилителя Uсм, вершину высокого потенциала питающей диагонали тензометрического мостового датчика отключают от напряжения питания Uп и соединяют с шиной "земля", тем самым обесточивают тензометрический мостовой датчик и на его выходе оставляют лишь систематическую аддитивную составляющую погрешности, равную Δадд, создаваемую внешними мешающими факторами, эту погрешность подают на вход инструментального усилителя и на его выходе получают сигнал Δад(K+ΔK)+Uсм, где Δад=Δадд+Δади, который записывают в третье запоминающее устройство, с выхода этого устройства сигнал Δад(K+ΔK)+Uсм подают на прямой вход второго сумматора, на инверсный вход второго сумматора подают сигнал Uсм, в результате чего на его выходе получают сигнал Δад(K+ΔK), этот сигнал посылают на вход третьего делителя в качестве делимого, чем на выходе третьего делителя формируют сигнал Δад, который подают на инверсный вход третьего сумматора, после этого по четвертому управляющему сигналу на питающую диагональ тензометрического мостового датчика подают напряжение питания Uп, в результате на измерительной диагонали, т.е. на выходе тензометрического мостового датчика получают рабочий измерительный сигнал, равный
с выхода первого делителя на дифференциальный вход инструментального усилителя, корректирующий вход инструментального усилителя соединяют с источником напряжения смещения выходного сигнала инструментального усилителя Uсм, вершину высокого потенциала питающей диагонали тензометрического мостового датчика отключают от напряжения питания Uп и соединяют с шиной "земля", тем самым обесточивают тензометрический мостовой датчик и на его выходе оставляют лишь систематическую аддитивную составляющую погрешности, равную Δадд, создаваемую внешними мешающими факторами, эту погрешность подают на вход инструментального усилителя и на его выходе получают сигнал Δад(K+ΔK)+Uсм, где Δад=Δадд+Δади, который записывают в третье запоминающее устройство, с выхода этого устройства сигнал Δад(K+ΔK)+Uсм подают на прямой вход второго сумматора, на инверсный вход второго сумматора подают сигнал Uсм, в результате чего на его выходе получают сигнал Δад(K+ΔK), этот сигнал посылают на вход третьего делителя в качестве делимого, чем на выходе третьего делителя формируют сигнал Δад, который подают на инверсный вход третьего сумматора, после этого по четвертому управляющему сигналу на питающую диагональ тензометрического мостового датчика подают напряжение питания Uп, в результате на измерительной диагонали, т.е. на выходе тензометрического мостового датчика получают рабочий измерительный сигнал, равный

где R - сопротивление тензорезисторов мостового датчика,
ΔR - изменение сопротивлений тензорезисторов при изменении измеряемых физических параметров,
этот сигнал подают на дифференциальный вход инструментального усилителя, в котором его преобразуют в сигнал  полученный сигнал с выхода инструментального усилителя посылают на прямой вход четвертого сумматора, на инверсный вход которого подают сигнал Uсм, на выходе четвертого сумматора получают сигнал
полученный сигнал с выхода инструментального усилителя посылают на прямой вход четвертого сумматора, на инверсный вход которого подают сигнал Uсм, на выходе четвертого сумматора получают сигнал  этот сигнал подают на первый вход четвертого делителя в качестве делимого, на выходе четвертого делителя получают сигнал
этот сигнал подают на первый вход четвертого делителя в качестве делимого, на выходе четвертого делителя получают сигнал  , этот сигнал посылают на прямой вход третьего сумматора, на выходе которого формируют сигнал
, этот сигнал посылают на прямой вход третьего сумматора, на выходе которого формируют сигнал  этот сигнал подают на первый вход пятого делителя в качестве делимого, на второй вход этого делителя подают сигнал Uп так, что на выходе пятого делителя т.е. на выходе измерительного устройства получают сигнал
этот сигнал подают на первый вход пятого делителя в качестве делимого, на второй вход этого делителя подают сигнал Uп так, что на выходе пятого делителя т.е. на выходе измерительного устройства получают сигнал  очищенный от систематических погрешностей, возникших в линиях связи тензометрического мостового датчика и инструментального усилителя, причем переключения с режима измерения аддитивных и мультипликативных погрешностей на рабочий режим измерений производят через заданные интервалы изменения температуры элементов измерительного канала, например датчика, или через заданные промежутки времени.
очищенный от систематических погрешностей, возникших в линиях связи тензометрического мостового датчика и инструментального усилителя, причем переключения с режима измерения аддитивных и мультипликативных погрешностей на рабочий режим измерений производят через заданные интервалы изменения температуры элементов измерительного канала, например датчика, или через заданные промежутки времени.
| Тензометрическое устройство с прямоугольным напряжением питания моста | 1979 |
|
SU781704A1 |
| Устройство для извлечения семян из шишек | 1985 |
|
SU1286146A1 |
| СИЛОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2003 |
|
RU2247952C2 |
| ДАТЧИК И СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2003 |
|
RU2267757C2 |
| СПОСОБ КАЛИБРОВКИ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2002 |
|
RU2262713C2 |

