Область техники
Настоящее изобретение относится, в общем плане, к области сельского хозяйства и обработки собранной продукции. Для этого используются транспортные средства, в особенности самоходные уборочные сельхозмашины, которые служат для сбора урожая и обработки убранной массы. Эти самоходные уборочные сельхозмашины, как правило, представляют собой зерноуборочные комбайны, полевые измельчители и все виды копателей корнеплодов, оснащенные электронными устройствами управления для приводов. Некоторыми из приводов являются приводы ходового механизма, причем привод ходового механизма представляет собой полный привод, который приводит все колеса, взаимодействующие с основанием. При этом передние колеса уборочной машины могут быть также выполнены в виде гусеницы, охватывающей два больших направляющих колеса. Привод колес осуществляется от главного двигателя, например, в виде двигателя внутреннего сгорания, с помощью гидронасоса и, по меньшей мере, одного гидромотора, который связан с гидронасосом и преобразует гидравлическую энергию в механическую работу для привода, по меньшей мере, одного колеса, находящегося в сцеплении с основанием или землей.
Электронные системы управления и исполнительные органы выполняют функции управления и регулирования гидромоторов, которые в качестве приводов приводят как передние, так и задние колеса посредством гидродинамической передачи мощности. Для обеспечения хорошей тяги и низкого проскальзывания колес на поверхности основания используются устройства управления, регулирующие приводной крутящий момент на колесах. Для регулирования приводных крутящих моментов в соответствующих местах в самоходных уборочных машинах используются датчики, сигналы которых обрабатываются устройствами управления.
Уровень техники
Из уровня техники известны различные системы, направленные на повышение тяги транспортных средств и снижение проскальзывания между шиной приводного колеса и основанием.
Прежде всего следует назвать полный привод, при котором в отличие от переднего или заднего привода мощность мотора воздействует на все колеса, касающиеся основания, для обеспечения определенной проходимости. Полный привод используется для повышения тяги за счет распределения крутящих моментов и улучшения устойчивости транспортного средства, он достаточно известен в уровне техники. В транспортных средствах с постоянным полным приводом мощность двигателя постоянно передается на все колеса и за счет дифференциалов обеспечивает полное выравнивание чисел оборотов без потерь мощности. Для устранения напряжений в приводной трансмиссии между передней и задней ходовыми осями встраивается дополнительный центральный дифференциал. Однако недостаток такого решения состоит в том, что при низком сцеплении или при отсутствии сцепления одного колеса или одной ходовой оси приводной момент, который может быть передан через это колесо или эту ходовую ось, ограничен, так что в экстремальном случае транспортное средство не может сдвинуться собственной тягой.
Устранение этого недостатка обеспечивает специальный передаточный механизм и электронная система управления VDC (Vehicle Dynamic Control - динамический контроль транспортного средства). Специальный передаточный механизм выравнивает неравномерное распределение нагрузок на ходовые оси сельскохозяйственных транспортных средств за счет того, что усилие разделяется между передней и задней осью, например, в соотношении 35:65, а электронная система управления сопоставляет числа оборотов колес и заданный водителем угол поворота рулевого колеса и может распознавать избыточное или недостаточное управление и изменять распределение усилия таким образом, что транспортное средство сохраняет нейтральную собственную управляемость.
В патентном документе ФРГ №19921856 А1 описан полный гидромеханический привод для многоосного транспортного средства, который позволяет распределять мощность привода между ходовыми осями с учетом сцепления между шинами транспортного средства и основанием. Представленный привод обеспечивает автоматическое бесступенчатое регулирование соотношения чисел оборотов, однако может также поддерживаться вмешательством регулятора в зависимости от угла поворота рулевого колеса. За счет этого осуществляется распределение крутящего момента на приводные ходовые оси посредством изменения соотношения чисел оборотов и даже при движении на крутых поворотах устраняются напряжения, описанные выше. Распределение мощности осуществляется для того, чтобы при изменении нагрузки на ходовые оси транспортного средства по возможности поддерживать одинаковым скольжение на всех приводных колесах.
Недостаток этой приводной системы заключается в том, что устройство управления и регулирования воспринимает ограниченное количество параметров транспортного средства и распределение нагрузки путем регулирования гидромоторов производится не для всех условий движения и процесса уборки.
Упомянутое устройство управления и регулирования называется ASP (системой противоскольжения) и TCS (traction control system - система управления тягой) и известно из уровня техники. Система ASP противоскольжения отвечает за то, чтобы колеса не буксовали при ускорении. При движении с излишним газом или при плохом основании с низкой характеристикой сцепления, что часто бывает в сельском хозяйстве, одно или несколько колес могут проскальзывать, так что направление движения транспортного средства становится нестабильным. Пробуксовка одного или нескольких колес относительно основания обозначается как проскальзывание шин. Для обеспечения максимальной передачи силы трения между шинами и различными основаниями на почве поля, а также при различных погодных условиях, используется система ASP противоскольжения для предотвращения проскальзывания колес и/или также избыточного или недостаточного управления транспортным средством. При наступлении опасности слишком сильного скольжения колес приводной момент регулируется путем целенаправленного торможения и/или управления двигателем. Система регулирования, которая среди прочих получает данные от датчиков чисел оборотов колес системы ABS (antilock brake system, антиблокировочная система тормозов), обеспечивает сцепление и устойчивость движения в фазах ускорения на прямых участках движения при движении на криволинейных участках пути. При этом системой ABS названа система антиблокировки, которая также повышает надежность движения сельскохозяйственных транспортных средств. Она действует прежде всего в определенных ситуациях путем того, что при резком торможении препятствует тенденции колес к блокированию посредством регулирования тормозного давления в короткие промежутки времени. Система ABS антиблокировки способна обеспечивать практически оптимальное регулирование поведения каждого отдельного колеса при торможении. Кроме того, программа ESP (электронная стабилизирующая программа) предотвращает проскальзывание колес, а также избыточное или недостаточное управление транспортным средством с помощью электронных датчиков, сигналы которых оцениваются и обрабатываются в системе, путем целенаправленного торможения отдельных колес. Таким образом, система ESP определяет поведение транспортного средства и вмешивается, когда определяется отклонение от заданных водителем данных, причем учитывается также изменение угла поворота рулевого колеса. Торможение гидромоторов может производиться путем изменения объемного расхода гидравлической жидкости.
Однако указанные системы ESP, ASP и ABS не удовлетворяют требованиям, которые установлены для приводных колес транспортных средств, в особенности сельскохозяйственных уборочных машин, в отношении обеспечения и ограничения оптимальной тяги таким образом, чтобы в достаточной степени избежать скольжения шин в различных ситуациях процесса уборки.
Из патентного документа ЕР 1350658 В1 известно устройство управления для полного гидропривода, которое управляет исполнительными органами по сигналам от датчиков (датчика числа оборотов и датчика давления). При этом исполнительные органы оказывают воздействие на две приводные ходовые оси или на относящиеся к ним гидромоторы посредством изменения удельного объемного расхода для достижения оптимальной тяги на приводных колесах. Эта система управления учитывает не только указанное выше поведение при движении, но также и распределение нагрузки на переднюю и заднюю ось при движении вверх и вниз по уклону, что позволяет избежать известного явления обратного проскальзывания. Изменение нагрузки на ходовые оси при движении по уклону вверх или вниз компенсируется посредством изменения приводной мощности на колесах. Однако фактического определения нагрузки на ходовые оси не производится. Вместо этого от датчика давления получают сигнал о разности давления между входным и выходным каналами гидромотора, а по сигналу датчика числа оборотов определяют режим эксплуатации гидромотора. По сигналу датчика давления можно распознать, осуществляет ли колесо привод транспортного средства или оно буксует. Недостаток системы состоит в том, что проскальзывание одного или нескольких колес не распознается достаточно быстро, а противодействующее управление может производиться только, когда проскальзывание уже имеет место.
В патентном документе ЕР 1232682 В1 описана электронная система управления двигателем, управляющая двигателем внутреннего сгорания. В системе управления записаны кривые мощности для управления двигателем внутреннего сгорания. Кривые мощности содержат данные о мощности двигателя в зависимости от различных параметров, таких как число оборотов двигателя, температура, привод устройств и другие. Согласно изобретению система управления содержит параметры машин в отношении устройств для уборки урожая. Замена устройства для уборки урожая воспринимается датчиками, причем датчик может представлять собой переключатель в кабине водителя, приводимый в действие водителем. Замена устройства для уборки урожая приводит к замене кривой мощности для двигателя внутреннего сгорания в системе управления. Посредством замены этой кривой мощности мощность двигателя внутреннего сгорания регулируется либо на повышение, либо на понижение. Таким образом, мощность двигателя внутреннего сгорания регулируется в зависимости от используемого навесного аппарата. Однако в решении не предусмотрено регулирование приводного момента на гидромоторах отдельных приводных колес.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в создании устройства управления указанного типа, которое устраняет указанные недостатки известных решений уровня техники, и в создании технического решения, которое позволяет ограничивать приводной момент приводных колес таким образом, что устраняется проскальзывание колес или шин относительно основания и может передаваться максимальный возможный приводной момент. Для самоходных уборочных сельхозмашин с четырьмя приводными колесами согласованное действие отдельных приводных колес при различных условиях сцепления имеет большое значение.
В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков, по пункту 1 формулы изобретения. Предпочтительные примеры осуществления и дополнительные решения по развитию изобретения изложены в зависимых пунктах и последующем описании.
Для оснащения транспортных средств, в особенности самоходных уборочных сельхозмашин, электронным устройством для привода ходового механизма, обладающим признаками по данному изобретению, предлагается для оптимизации тяги и предотвращения проскальзывания, по меньшей мере, на одном колесе задание величины крутящего момента на гидромоторе в зависимости от условий эксплуатации. При этом предпочтительно при изменении условий эксплуатации настроенный на гидромоторе крутящий момент изменяется с адаптацией к условиям эксплуатации, так что проскальзывание или пробуксовка колеса снижается или даже предотвращается. Использование транспортного средства предпочтительно определяет задание крутящего момента колеса, при этом под использованием имеются в виду оснащение машин или условия эксплуатации транспортного средства.
Известные из уровня техники системы управления, такие как система ASP (система противоскольжения), способны ограничивать проскальзывание, когда оно уже имеет место и поддается измерению на приводном колесе, причем в этом случае уже может происходить повреждение луговой дернины при соответствующей работе уборочной машины на уборке травы.
Создаваемый гидромотором крутящий момент зависит от числа оборотов, которое, в свою очередь, зависит от расхода и давления потока, подводимого от гидронасоса, а создаваемый гидромотором приводной крутящий момент для приводного колеса определяется давлением нагрузки и удельным объемным расходом. Под удельным объемным расходом в гидромоторах в гидравлике подразумевается количество гидравлической жидкости, которое гидромотор потребляет на один оборот. В регулируемых гидромоторах, о которых здесь идет речь, удельный объемный расход может регулироваться. Другими словами, мощность, передаваемая гидромотором на приводное колесо, пропорциональна удельному объемному расходу, числу оборотов и перепаду давления. Произведение удельного объемного расхода на число оборотов дает общий объемный расход, при этом перепад давления является разностью между давлением гидравлической жидкости, подаваемой от гидронасоса, и давлением жидкости на выходе гидромотора. Из этого следует дальнейшее требование в соответствии с изобретением, чтобы задание удельного объемного расхода на гидромоторе зависело от условий эксплуатации, поскольку он пропорционален заданному крутящему моменту и выходной мощности гидромотора.
Определение заданных величин крутящего момента или удельного объемного расхода, которые должны задавать максимальный допустимый крутящий момент одного или нескольких колес, осуществляется на основе получения дополнительных данных и/или сигналов от датчиков. Получение данных и/или сигналов осуществляется в электронном устройстве управления по изобретению, которое оценивает данные и сигналы и по ним вычисляет заданный удельный объемный расход для гидромоторов. Сигналы датчиков поступают, например, от датчиков числа оборотов, находящихся на приводных ходовых осях. В отличие от них данные образованы параметрами машин, которые состоят из статических и динамических параметров машин, поскольку лежащие в основе параметров машин устройства оказывают преимущественное влияние на нагрузку на колеса или тягу на колесах. Устройства образуют статическое оснащение машин, от которого образуются параметры машин, зависящие от нагрузки на колеса. К статическому оснащению машин относится, например, расположенный на самоходной уборочной машине аппарат для приема убранной массы, от которого в устройство управления поступают данные обозначения типа, оборудования и рабочей ширины, то есть различные параметры машин. Также и тип машины транспортного средства, используемые шины и оснащение его двигателя учитываются в устройстве управления. Сменные аппараты для приема убранной массы четко определяют осевую нагрузку или нагрузку на приводные колеса и также оказывают серьезное влияние на тягу и степень проскальзывания приводных колес. Поэтому в соответствии с изобретением косвенным образом определяется нагрузка, по меньшей мере, на одно колесо с гидростатическим приводом, а крутящий момент на ходовой оси или колесе регулируется в зависимости от определенной нагрузки на колесо. Другими статическими параметрами, которые поступают в устройство управления в качестве данных для расчета регулирования удельного объемного расхода для приводных колес, являются дополнительные массы, которые обусловлены, например, различным техническим оснащением уборочной машины в ее задней части. Далее, в качестве параметра машин учитываются вид убираемой культуры, поскольку трава, кукуруза и зерновые и другие культуры существенно различаются по своему весу и оказывают влияние на нагрузку на колеса, а также характеристики почвы при эксплуатации. Так, например, при уборке травы на сухом лугу или при срезании негустой травы требуются высокие скорости движения с достаточной тягой. В противоположность этому при уборке кукурузы на тяжелой, влажной почве и/или при работе с прицепом для транспортирования убранной массы нужна полная тяга при более низкой скорости движения. Эти различные требования к тяге и, следовательно, к гидравлическим приводным устройствам в зависимости от условий эксплуатации учитываются устройством управления по изобретению при задании удельного объемного расхода.
В принципе, статические параметры машин определяются из оснащения машин и принимаются программой устройства управления для расчета заданного крутящего момента. В любой момент времени со стороны оператора возможно ручное изменение статических параметров машин в программе устройства управления путем входа в соответствующий пункт меню, так что всегда обеспечивается возможность оптимизации тяги и снижения удельного объемного расхода.
В отличие от этого в системах управления ASP и ESP невозможно ручное вмешательство в управление со стороны водителя. Существует возможность только включения или выключения системы управления.
Предпочтительно в программу устройства управления вводятся также динамические параметры машин для обеспечения возможности целенаправленного расчета величины задаваемого удельного объемного расхода. Динамические параметры машин или лежащие в их основе переменные массы, переменное направление, наклон и/или скорость движения транспортного средства определяются, поскольку они также оказывают влияние на нагрузку на колеса или ходовые оси и, соответственно, на тягу или проскальзывание колес. Поэтому согласно изобретению переменные динамические параметры машин также привлекаются к вычислению заданного удельного объемного расхода для того, чтобы постоянно поддерживать оптимальную тягу на отдельном приводном колесе или на нескольких приводных колесах и предотвращать проскальзывание одного или нескольких приводных колес. Переменные динамические параметры машин появляются, например, при изменении установки аппарата для приема убранной массы, изменении скорости движения и угла поворота рулевого колеса. Также и параметр наклона транспортного средства, как это известно из патентного документа ЕР 1350658 В1, и ускорения транспортного средства в продольном или поперечном направлении, как это известно из системы ASP, учитываются в устройстве управления. Следующая задача изобретения состоит в том, чтобы для определения нагрузки на ходовые оси учитывать также переменный уровень заполнения топливного бака и зернового бункера зерноуборочного комбайна. Кроме того, в программу устройства управления поступает динамический параметр машин в отношении балансирного положения ходовой оси. Следующий пример осуществления изобретения предусматривает косвенное определение нагрузки на колесо, например, с помощью датчика нагрузки, установленного на маятниковой подвеске.
Переменные динамические параметры машин воспринимаются датчиками, сигналы которых обрабатываются в электронном устройстве вместе с данными статических параметров машин, и из них определяются величины для задания крутящего момента. Посредством величин предварительного выбора крутящего момента регулируется заданный удельный объемный расход для приводных гидромоторов. Другими словами, вычисленная из статических и динамических параметров машин величина задания крутящего момента примерно соответствует одной предварительно имеющейся кривой мощности для гидромотора, которая подобна кривой мощности для двигателя внутреннего сгорания, заложенной в устройстве управления. Вычисленная из параметров машин и заданная кривая мощности для гидромотора является кривой мощности, которая зависит от нагрузки на колесо, служит для регулирования приводного крутящего момента посредством управления удельным объемным расходом, по меньшей мере, одного колеса с гидростатическим приводом и предпочтительно используется для всех приводных колес. Кривая мощности содержит данные, которые соответствуют ситуации тяги и проскальзывания на каждом отдельном приводном колесе. Так, например, при изменении действительного положения аппарата для приема убранной массы изменяется нагрузка как на переднюю, так и на заднюю ходовую ось, в результате чего неблагоприятным образом изменяются также тяга, управляемость и условия проскальзывания на приводных колесах. Для принятия мер против этих неблагоприятных изменений согласно изобретению за счет наличия в кривой мощности динамических параметров машин, относящихся к аппарату для приема убранной массы, осуществляется изменение настройки крутящего момента на приводных моторах. Изменение крутящего момента вызывает посредством изменения заданного удельного объемного расхода повышение тяги на приводных гидромоторах передней ходовой оси и ее снижение на приводных гидромоторах задней ходовой оси, причем в начале движения по криволинейному участку добавляется еще изменение крутящего момента между левым и правым приводными моторами. При этом заданный удельный объемный расход отдельных приводных моторов в любой момент регулируется таким образом, что устанавливается оптимальная тяга приводных колес, а нежелательное проскальзывание отдельных приводных колес предотвращается благодаря определяемым условиям эксплуатации.
Таким образом, при задании удельного объемного расхода для гидромоторов косвенным определяется изменяющееся распределение веса на ходовые оси уборочной машины, причем задание в зависимости от условий эксплуатации осуществляется посредством автоматического распределения крутящих моментов между передней и задней ходовыми осями, известного также под термином регулируемого межосевого дифференциала. Распределение крутящих моментов может варьироваться между соотношениями от 60:40 до 90:10 и предпочтительно составляет 80:20 в зависимости от оснащения уборочной машины.
В простом примере осуществления изобретения заданный крутящий момент регулируется только на основе используемого аппарата для приема убранной массы. Для того чтобы оператор машины мог принимать меры при замеченном проскальзывании колес при эксплуатации транспортного средства, для него обеспечивается возможность ручного вмешательства в работу устройства управления с помощью операторской системы. В предпочтительном примере осуществления заданный удельный объемный расход для каждого колеса или для каждой ходовой оси, а также заданное распределение нагрузки на ходовые оси могут быть изменены, а задание крутящего момента в соответствии с изобретением может быть изменено вручную в зависимости от условий эксплуатации. При этом возможно задание смещенной величины крутящего момента для одного колеса, которое будет действительным для каждого последующего задания крутящего момента в зависимости от использования с тем же аппаратом для приема убранной массы. За счет этого могут выгодным образом устраняться затруднения, в особенности при слабой тяге вследствие условий эксплуатации.
В особом примере осуществления изобретения тяга воспринимается датчиком проскальзывания, который вмешивается в работу устройства управления, так что осуществляется автоматическая адаптация заданного удельного объемного расхода. Для этого пригоден, например, радиолокационный датчик, который измеряет действительную скорость движения транспортного средства, что при известном числе оборотов позволяет определять проскальзывание. При распознавании проскальзывания корректировка удельного объемного расхода позволяет предотвратить дальнейшее проскальзывание.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны конкретные примеры осуществления изобретения. На чертежах:
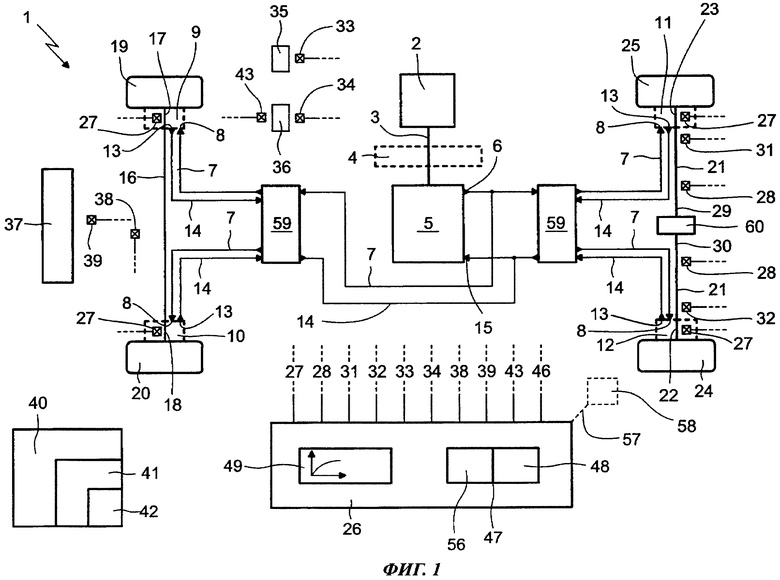
фиг.1 схематично изображает приводную систему транспортного средства с полным приводом колес, в особенности самоходной уборочной сельхозмашины с электронным устройством управления приводами, и
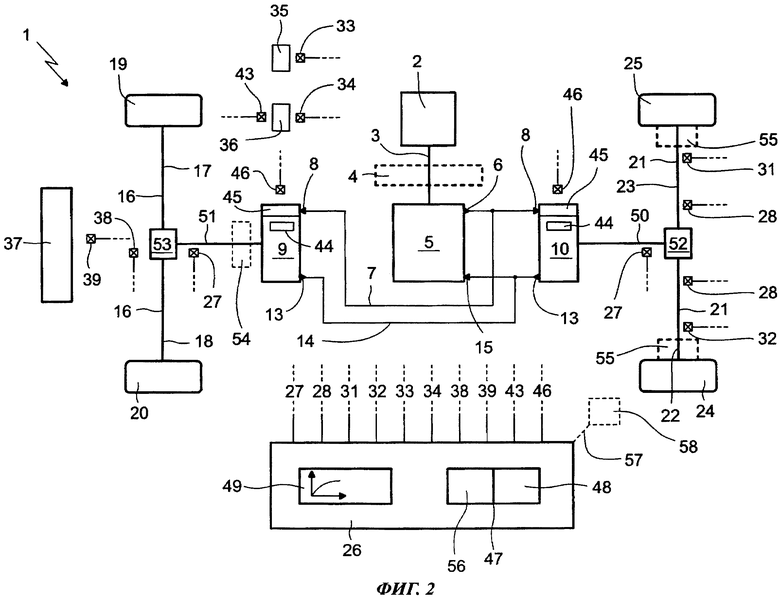
фиг.2 изображает электронное устройство управления по изобретению в другом примере выполнения транспортного средства.
Осуществление изобретения
На фиг.1 схематично представлен пример выполнения приводной системы транспортного средства с полным приводом колес, в особенности самоходной уборочной сельхозмашины 1 с электронным устройством 26 управления для гидроприводов ходового механизма. Уборочная машина 1 содержит раму (не показана) или самонесущее шасси, опирающееся на передние колеса 19, 20 и задние колеса 24, 25, которые находятся в сцеплении с основанием. Задние колеса 24, 25, как правило, выполнены управляемыми, а передние колеса 19, 20 снабжены шинами большего диаметра по сравнению с задними колесами 24, 25 и несут большую часть веса транспортного средства, в особенности при выполнении уборочной машины 1 в виде зерноуборочного комбайна. Однако передние колеса 19, 20 уборочной машины 1 могут быть выполнены в виде гусениц (не показано), при этом каждая гусеница соответствует одному переднему колесу 19, 20. Вследствие различного распределения веса транспортного средства на переднюю ходовую ось 16 и заднюю ходовую ось 21 на передних колесах 19, 20 и задних колесах 24, 25 осуществляется различная тяга. Расположенные на передней ходовой оси 16 передние колеса 19, 20 имеют более высокую нагрузку, поэтому их характеристики тяги являются более решающими по сравнению с задними колесами 24, 25 на задней ходовой оси 21.
Приводная система содержит главный двигатель 2, выполненный в виде двигателя внутреннего сгорания, например дизельного двигателя, который приводит различные устройства обработки и транспортирования убранной массы и привод ходового механизма уборочной машины 1. Для привода ходового механизма от вала 3 главного двигателя 2 осуществляется привод гидронасоса 5, в котором путем вытеснения текучей среды посредством качающейся шайбы (см. фиг.2) обеспечивается преобразование механической мощности в гидравлическую мощность (равную произведению давления на объемный расход), причем качающаяся шайба может быть регулируемой. Управление гидронасосом 5 здесь не описывается, поскольку оно широко известно. В альтернативном примере осуществления между главным двигателем 2 и гидронасосом 5 может быть встроен передаточный механизм 4, показанный штриховыми линиями. Гидронасос 5 имеет выход 6 и вход 15. Выход 6 в качестве источника питания соединен с помощью гидролиний 7 и распределителя 59 с входами 8 гидромоторов 9, 10, 11, 12. Выходы 13 гидромоторов 9, 10, 11, 12 соединены сливными гидролиниями 14 с входом 15 гидронасоса 5.
Два гидромотора 9, 10 расположены на передней ходовой оси 16, причем каждый гидромотор 9, 10 связан с соответствующим передним колесом 19, 20 приводным валом 17, 18. Два гидромотора 11, 12 находятся на задней ходовой оси 21 и связаны приводными валами 22, 23 с задними колесами 24, 25. Предпочтительно задняя ходовая ось 21 является балансирной осью, которая выполнена в виде жесткой оси и несет оба задних колеса 24, 25. Жесткая ходовая ось в своей средней части находится под задним концом уборочной машины 1 и укреплена на раме машины с помощью пальца 60, ориентированного в направлении движения. Этот палец 60 обеспечивает возможность качания ходовой оси 21 поперечно направлению движения и может быть выполнен в виде измерительного пальца для определения нагрузки на ходовую ось.
Устройство 26 управления связано с множеством расположенных в уборочной машине 1 датчиков, для приема и обработки их сигналов 56. Датчики контролируют изменения динамических параметров машин. К этим датчикам относятся датчики 27 числа оборотов, которые расположены на приводных валах 17, 18, 22, 23 и выдают импульс или несколько импульсов при каждом обороте приводного вала 17, 18, 22, 23. На задней ходовой оси 21, которая выполнена управляемой, находятся датчики 28, которые воспринимают действительный угол поворота, причем задняя ходовая ось разделена на две части и выполнена в виде балансирной оси 29, 30. Балансирные оси 29, 30 оснащены датчиками 31, 32, которые контролируют балансирное положение ходовых осей 29, 30.
На жесткой передней ходовой оси 16 расположен датчик 38 поперечного и продольного наклона, который поставляет сигналы 56 бокового наклона или спуска и подъема на уклон. Другие датчики 33, 34 определяют уровень заполнения топливного бака 35 и зернового бункера 36. Также перемещение, подъем и опускание навесного аппарата, например аппарата 37 для приема убранной массы, определяются датчиком 39 перемещения, а его сигнал 56 учитывается в устройстве 26 управления в качестве динамического параметра машин.
Данные 48 статических параметров машин также принимаются устройством 26 управления, причем получение данных 48 осуществляется частично автоматически или с помощью эксплуатационных функций 42 в операторской системе 41, расположенной в кабине 40 уборочной машины 1. Данные статических параметров машин в основном задаются в зависимости от используемых устройств оснащения машин. К статическому оснащению машин относится, например, имеющийся на уборочной машине 1 аппарат 37 для приема убранной массы, от которого в устройстве 26 управления автоматически задаются данные обозначения типа, оборудования и рабочей ширины. В дальнейшем решении по развитию изобретения в уборочной машине 1 может быть встроен не показанный датчик, который автоматически распознает используемый при уборке аппарат 37 для приема убранной массы и передает сведения об этом в устройство 26 управления. Далее, аппарат 37 для приема убранной массы может быть снабжен собственным электронным модулем, который передает свои данные на устройство 26 управления по шине передачи данных. Сменные аппараты для приема убранной массы четко определяют осевую нагрузку или нагрузку на приводные колеса 19, 20, 24, 25 и также оказывают влияние на тягу и степень проскальзывания приводных колес 19, 20, 24, 25. Так, например, при замене аппарата 37 для приема убранной массы, например подборщика травы на кукурузную приставку, устройство 26 управления автоматически устанавливает на гидромоторах 9, 10, 11, 12 измененные заданные величины крутящего момента.
Также и тип машин транспортного средства и оснащение его двигателя 2 учитываются в устройстве 26 управления перед вводом транспортного средства в эксплуатацию с помощью различных параметров машин путем программирования программного обеспечения 47. Дополнительными статическими параметрами машин, которые поступают в программное обеспечение 47 устройства 26 управления в виде данных 48, являются дополнительные весовые нагрузки от различного оснащения уборочной машины 1 в ее задней части, например от соломорезки и распределителя половы. Далее, автоматически учитывается параметр машин в отношении вида убираемой культуры, поскольку трава, кукуруза и зерновые существенно различаются по своему весу и оказывают влияние на осевую нагрузку и тягу. При этом с помощью датчика 43 влажности определяется также влажность убранной массы. Естественно, при уборке урожая в качестве параметра учитывается также характеристика основания или земли, то есть определяется наличие таких условий как влажная, тяжелая или твердая или сухая земля. Характеристика основания может быть оценена оператором машины и введена через операторскую систему. Кроме того, характеристика земли может быть определена путем пробного прохода, при котором привод транспортного средства работает определенное время с различными заданными величинами крутящего момента и при этом вручную или автоматически выбираются заданные величины крутящего момента, при которых может достигаться хорошая тяга без проскальзывания. В дополнение к этим установленным заданным величинам крутящего момента электронное устройство 26 управления определяет все остальные параметры машин и затем в соответствии с изобретением регулирует эти заданные величины крутящего момента в зависимости от использования, исходя из полученных данных.
Дополнительные параметры машин могут быть взяты от других имеющихся в транспортном средстве устройств 58 управления и введены в устройство 26 управления для использования при определении оптимальной кривой 49 мощности.
Из установленных таким образом статических и динамических параметров машин в устройстве 26 управления вычисляются величины для задания крутящего момента, из которых определяется кривая 49 мощности для гидромоторов 9, 10, 11, 12. Из кривой 49 мощности задается удельный объемный расход для гидромоторов 9, 10, 11, 12. Настройка заданного удельного объемного расхода осуществляется путем регулирования управляемого гидромотора, то есть путем регулирования положения качающейся шайбы 44 гидромоторов 9, 10, 11, 12. В некоторых системах регулирование управляемых гидромоторов осуществляется посредством регулирования положения качающихся шайб или наклонных дисков. Для регулировки положения качающейся шайбы 44 служит регулировочное устройство 45 (фиг.2), которое передает движение, заданное устройством 26 управления, на качающуюся шайбу 44. При этом регулировочное устройство 45 предпочтительно может представлять собой электромеханический исполнительный орган. Датчик 46 определяет действительное положение регулировочного устройства 45, что обеспечивает обратную связь с устройством 26 управления и контроль предварительного выбора крутящего момента, то есть задания удельного объемного расхода. Таким образом, качающаяся шайба 44 гидромоторов 9, 10, 11, 12 управляется на основе выявленных и оцененных, зависящих от нагрузки на ходовые оси параметров машин, по которым выбирается кривая 49 мощности, содержащаяся в устройстве 26 управления и задающая регулируемый удельный объемный расход. С помощью расположенной в кабине 40 водителя операторской системы 41 водитель может вручную вмешиваться в процесс управления устройства 26 управления и путем сдвига кривой 49 мощности вручную или автоматически заменять заданный крутящий момент для одного или нескольких гидромоторов 9, 10, 11, 12. Сдвиг может производиться с помощью операторской функции 42, например, через посредство поворотного потенциометра, за счет чего кривая 49 мощности может быть повышена или понижена.
На фиг.2 показано электронное устройство 26 управления в другом примере выполнения привода ходового механизма. Здесь не повторяется описание элементов и особенностей привода и устройства 26 управления, общих с примером выполнения по фиг.1, а соответствующие элементы обозначены теми же позициями. Существенное отличие решения от выполнения привода ходового механизма по фиг.1 заключается в том, что показанный на фиг.2 полный привод содержит только два гидромотора 9, 10, которые посредством приводных валов приводят дифференциальные передаточные механизмы 52, 53. Первый гидромотор 10 приводит посредством первого приводного вала 50 и первого самозапирающегося дифференциального передаточного механизма 52 оба задних колеса 24, 25. Второй гидромотор 9 приводит посредством второго приводного вала 51 и второго самозапирающегося дифференциального передаточного механизма 53 оба передних колеса 19, 20. Первый гидромотор 10 может быть избирательно включен или выключен, так что полный привод предпочтительно осуществляется только в процессе уборки, когда требуются лучшие характеристики сцепления, а при нормальном дорожном движении он отключается. Между вторым гидромотором 9 и вторым дифференциальным передаточным механизмом 53 может быть встроена коробка 54 передач (показана штриховыми линиями) с различными переключаемыми ступенями передач. Для обеспечения заднего хода коробка 54 передач может включать передачу заднего хода. Альтернативные варианты обеспечения заднего хода здесь не описываются. В альтернативном примере осуществления на заднем конце уборочной машины 1 вместо первого гидромотора 10 и первого дифференциального передаточного механизма 52 на задних приводных колесах 24, 25 жесткой управляемой ходовой оси 21 могут быть установлены встроенные в ступицы колес моторы 55 (показаны штриховыми линиями).
Как показано на фиг.1, устройство 26 управления связано с множеством датчиков для определения динамических параметров машин. Как это представлено на фиг.1, из суммы данных 48 статических параметров машин и суммы сигналов 56 датчиков, то есть динамических параметров машин, устройство 26 управления осуществляет предварительный выбор крутящего момента и из него рассчитывает кривую 49 мощности, по которой определяются заданные величины удельного объемного расхода для гидромоторов 9, 10. С помощью описанного устройства 26 управления в соответствии с изобретением обеспечивается возможность управления функцией полного привода в самоходных уборочных машинах 1 с гидростатическим приводом приводных колес 19, 20, 24, 25 таким образом, что в зависимости от условий эксплуатации, с одной стороны на гидромоторах 9, 10, 11, 12, всегда имеется в распоряжении максимальная тяга, и с другой стороны, может предотвращаться проскальзывание приводных колес 19, 20, 24, 25. Для предотвращения и распознавания проскальзывания в качестве опции может быть установлен один или несколько датчиков проскальзывания (не показаны), встроенных в корпус машины. Радиолокационные датчики определяют действительную скорость движения транспортного средства и в координации с данными числа оборотов, по меньшей мере, одного колеса 19, 20, 24, 25 распознают проскальзывание, по меньшей мере, на одном колесе 19, 20, 24, 25 или непосредственно контролируют приводные колеса 19, 20, 24, 25 и при проскальзывании автоматически вмешиваются в работу устройства 26 управления. Это вмешательство вызывает изменение кривой 49 мощности, вследствие чего происходит сдвиг заданной величины крутящего момента. При наступлении проскальзывания осуществляется быстрый сдвиг вниз заданной величины удельного объемного расхода, что вызывает снижение крутящего момента на колесе и воздействие на проскальзывание. Когда сцепление приводных колес 19, 20, 24, 25 с основанием восстанавливается, заданная величина крутящего момента вновь повышается автоматически. Таким образом, радиолокационные датчики привлекаются устройством 26 управления к регулированию приводных гидромоторов 9, 10, 11, 12. Само собой разумеется, что известные из уровня техники указанные устройства, такие как системы ABS (система антиблокировки), VDC (динамический контроль транспортного средства), TCS (система управления тягой), ASP (система противоскольжения), ESP (электронная стабилизирующая программа) могут составлять компоненты электронной системы управления приводом транспортного средства, оснащенного в соответствии с изобретением.
В следующем упрощенном примере выполнения, который в принципе соответствует выполнению по фиг.2, отсутствует гидромотор 9. При этом гидравлический привод передней ходовой оси 16 уборочной машины 1 осуществляется непосредственно от механического главного двигателя 2 с передачей на дифференциальный передаточный механизм 53 или на него через передаточный механизм 4, расположенный между главным двигателем и дифференциальным передаточным механизмом 53, и далее на передние колеса 19, 20 или на приводные направляющие колеса гусениц. Задние колеса 24, 25, расположенные на управляемой задней ходовой оси 21, приводятся встроенными в ступицы колес гидростатическими моторами 55 путем задания удельного объемного расхода. Предпочтительно задние колеса 24, 25 расположены на жесткой балансирной оси, так что задняя ходовая ось 21 может совершать балансирное движение поперечно направлению движения уборочной машины 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЦЕПКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА И ДВИЖИМОЙ ИМ СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ МАШИНЫ | 2015 |
|
RU2676996C2 |
| САМОХОДНАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2015 |
|
RU2674597C2 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ УБОРОЧНОЙ МАШИНЫ | 2003 |
|
RU2359446C2 |
| САМОХОДНАЯ СТРОИТЕЛЬНАЯ МАШИНА | 2012 |
|
RU2600253C2 |
| КОМБИНАЦИЯ ТЯГАЧА И БУКСИРУЕМОЙ ИМ СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ МАШИНЫ | 2014 |
|
RU2637658C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2008 |
|
RU2457657C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2014 |
|
RU2667056C2 |
| Стенд для имитационного испытания системы управления беспилотным зерноуборочным комбайном | 2020 |
|
RU2728860C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛНОПРИВОДНЫМ ЭЛЕКТРОМОБИЛЕМ | 2019 |
|
RU2707429C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ СИСТЕМА | 2013 |
|
RU2633559C2 |
Изобретение относится к электронному устройству управления для привода транспортного средства. Электронное устройство управления осуществляет оптимизацию тяги и предотвращение проскальзывания колеса посредством задания величины крутящего момента на гидромоторе в зависимости от условий эксплуатации, определение статических и динамических параметров машины. Статические и динамические параметры машины содержат данные по оснащению и условиям эксплуатации транспортного средства. Одним из условий эксплуатации является влажность убранной массы. Из определенных статических и динамических параметров машины при помощи устройства управления вычисляются величины для задания крутящего момента. Технический результат заключается в предотвращении проскальзывания приводного колеса. 12 з.п. ф-лы, 2 ил.
1. Электронное устройство (26) управления для привода транспортного средства, в особенности самоходной уборочной сельхозмашины (1) с полным приводом, состоящим из главного двигателя (2), гидронасоса (5) и, по меньшей мере, одного гидромотора (9, 10, 11, 12), который приводит, по меньшей мере, одно колесо (19, 20, 24, 25), находящееся в сцеплении с основанием, отличающееся тем, что оптимизация тяги и предотвращение проскальзывания, по меньшей мере, на одном колесе (19, 20, 24, 25) осуществляются посредством задания величины крутящего момента на гидромоторе (9, 10, 11, 12) в зависимости от условий эксплуатации, при этом определяются статические и динамические параметры (27, 28, 31, 32, 33, 34, 38, 39, 43, 46) машины, содержащие данные по оснащению и условиям эксплуатации транспортного средства, причем, по меньшей мере, одним из условий эксплуатации является влажность убранной массы, и из определенных статических и динамических параметров машины при помощи устройства (26) управления вычисляются величины для задания крутящего момента.
2. Электронное устройство управления по п.1, отличающееся тем, что задание крутящего момента на гидромоторе (9, 10, 11, 12) в зависимости от условий эксплуатации осуществляется путем задания удельного объемного расхода гидромотора (9, 10, 11, 12).
3. Электронное устройство управления по п.2, отличающееся тем, что задание удельного объемного расхода обеспечено получением данных (48) и/или сигналов (56) от датчиков.
4. Электронное устройство управления по п.3, отличающееся тем, что данные (48) образованы статическими параметрами машины, а сигналы (56) образованы динамическими параметрами машины.
5. Электронное устройство управления для привода транспортного средства по п.4, отличающееся тем, что статические параметры машины определяются из оснащения машин.
6. Электронное устройство управления по п.4 или 5, отличающееся тем, что динамические параметры машины определяются из переменных масс, направления и/или скорости движения транспортного средства.
7. Электронное устройство управления по п.4, отличающееся тем, что полученные данные (48) и/или сигналы (56) оцениваются в электронном устройстве (26) управления с получением величин для предварительного выбора крутящего момента.
8. Электронное устройство управления по п.7, отличающееся тем, что по вычисленным величинам предварительного выбора крутящего момента определяют кривую (49) мощности для гидромоторов (9, 10, 11, 12), которая задает удельный объемный расход, по меньшей мере, для одного гидромотора (9, 10, 11, 12).
9. Электронное устройство управления по п.8, отличающееся тем, что кривая (49) мощности образует зависящую от нагрузки на ходовые оси кривую (49) мощности и служит для настройки приводного крутящего момента посредством регулирования удельного объемного расхода, по меньшей мере, для одного приводного колеса (19, 20, 24, 25) с гидростатическим приводом.
10. Электронное устройство управления по п.8 или 9, отличающееся тем, что кривая (49) мощности содержит данные, которые соответствуют ситуации тяги и проскальзывания на каждом отдельном приводном колесе (19, 20, 24, 25).
11. Электронное устройство управления по одному из пп.1-5, 7-9, отличающееся тем, что устройство (26) управления косвенным образом определяет нагрузку, по меньшей мере, на одно колесо (19, 20, 24, 25) с гидростатическим приводом, а крутящий момент на колесе регулируется в зависимости от определенной нагрузки на колесо.
12. Электронное устройство управления по п.8 или 9, отличающееся тем, что с помощью операторской системы (41) осуществляется вмешательство в устройство (26) управления, и кривая (49) мощности заменяется вручную, посредством чего производится задание удельного объемного расхода.
13. Электронное устройство управления по одному из пп.1-5, 7-9, отличающееся тем, что, по меньшей мере, один датчик проскальзывания вмешивается в устройство (26) управления и при этом осуществляется автоматическая адаптация заданного удельного объемного расхода.
| ЕР 1716737 А1, 02.11.2006 | |||
| СМЫВНОЙ МЕХАНИЗМ ДЛЯ СМЫВНОГО БАЧКА, В ЧАСТНОСТИ ДЛЯ СМЫВНОГО БАЧКА ДВОЙНОГО ДЕЙСТВИЯ | 2004 |
|
RU2351716C2 |
| DE 10350117 А1, 03.06.2004 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИДРООБЪЕМНОЙ ТРАНСМИССИЕЙ КОЛЕСНОЙ МАШИНЫ | 2004 |
|
RU2264571C1 |

