Изобретение относится к области машиностроения и касается особенностей конструктивного выполнения автотранспорта, в частности – схеме управления электромобилем со всеми ведущими колесами 4х4 с применением асинхронных мотор-колес и может быть использовано в различных областях техники, например, в качестве построения различных транспортных средств, как электромобили категории A, B, C, D, уборочная, социальная, коммунальная техника, грузовой городской электромобиль, электротранспорт категории сертификации L7 и т.д.
Известен способ управления электромобиля 4х4, описанный в патенте US20130241445, МПК B60L 15/20, 2013. Способ управления электрическим транспортным средством, включающим первый электродвигатель, соединенный с осью привода транспортного средства, и второй электродвигатель, соединенный с ведущей осью транспортного средства. Способ содержит этапы, на которых:
а) отслеживается датчик скорости колеса, соответствующий упомянутой оси привода транспортного средства, первый датчик скорости двигателя и второй датчик скорости двигателя и вычисление скорости транспортного средства, соответствующей указанному электромобилю, на основе выходного сигнала датчика скорости колеса, упомянутого первого датчика скорости двигателя и упомянутого второго датчика скорости двигателя, при этом этап вычисления скорости транспортного средства выполняется блоком формирования команды управления тягой;
b) производится контроль тормозного датчика и датчика ускорения и вычисление общего требования к крутящему моменту на основе выходного сигнала от упомянутого тормозного датчика и упомянутого датчика ускорения и указанной скорости транспортного средства, причем этап вычисления потребности в общем крутящем моменте выполняется посредством блока формирования команды управления тягой;
c) распределение упомянутого запроса на требуемый крутящий момент в оптимальном первом запросе крутящего момента двигателя и оптимальном втором запросе крутящего момента двигателя, при котором упомянутый этап разделения запроса требуемого крутящего момента выполняется блоком оптимизации разделения крутящего момента;
d) вводится коэффициент скольжения целевого колеса и вычисления ошибки скольжения соответствующей оси привода транспортного средства, на основе выходного сигнала датчика скорости колеса и скорости транспортного средства и упомянутого коэффициента скольжения колеса, при котором упомянутый этап вычисления первого проскальзывания выполняется упомянутой тягой блок формирования команды управления;
e) осуществляется минимизация упомянутой ошибки скольжения с использованием системы управления с обратной связью, реализованной блоком управления тягой, причем упомянутый блок управления тягой дополнительно выполняет этапы преобразования упомянутого оптимального первого запроса крутящего момента двигателя в первую команду крутящего момента двигателя и преобразования упомянутого оптимального второго запроса крутящего момента двигателя во вторую команду крутящего момента двигателя, основанный на упомянутом этапе минимизации упомянутой ошибки скольжения;
f) управление упомянутым первым электродвигателем на основании упомянутой первой команды крутящего момента двигателя;
g) управление вторым электродвигателем на основании упомянутой второй команды крутящего момента двигателя;
h) этапы а) – g), повторяющиеся во время работы упомянутого электрического транспортного средства.
Однако, данный способ предполагает применение сложной механической и электронной конструкции, высокие вычислительные параметры применяемой вычислительной техники для работы в реальном режиме времени и их распределение в различных блоках с обеспечением взаимодействия и передачи данных от одного блока в другой, что с увеличением скорости приносит большие погрешности в пересчете управляющих сигналов, отсутствие абсолютного контроля крутящего момента, мощности и скорости вращения на каждом колесе, ограниченные возможности по рекуперации энергии из-за расчетных погрешностей на распределение крутящего момента от электродвигателя через редукторную и дифференциальную часть и их влияние на прямую связь между колесом и электродвигателем.
Известна система привода электрического транспортного средства, содержащая первый и второй электродвигатели; блок разделения крутящего момента, сконфигурированный для приема первого входа, который включает в себя, по меньшей мере, общий запрос крутящего момента для первого и второго электродвигателей и соответствующие первый и второй максимальные крутящие моменты для первого и второго электродвигателей, блок разделения крутящего момента, сконфигурированный для обработки первого входа без учета скольжения колес и для генерации, по меньшей мере, соответствующих первого и второго запросов крутящего момента для первого и второго электродвигателей; и блок управления тягой и стабилизацией, выполненный с возможностью приема второго входа, который включает в себя, по меньшей мере, первый и второй запросы крутящего момента, общий запрос крутящего момента, вычисленную скорость транспортного средства и соответствующие ошибки первого и второго проскальзывания, относящиеся к первому и второму электродвигателям, блок управления тягой и стабилизацией, выполненный с возможностью обработки второго входа и для формирования соответствующих первой и второй команд крутящего момента для первого и второго электродвигателей. (см. патент TESLA MOTORS, INC. US 9162586, МПК B60L 15/20 (20060101); B60W 10/08 (20060101); B60K 1/02 (20060101); B60K 1/00 (20060101) от 11.12.2014.) Данное решение принято за прототип.
Причины, по которым нельзя достичь технического результата является механическая и электронная сложность конструкции, отсутствие абсолютного контроля крутящего момента, мощности и скорости вращения на каждом колесе, ограниченные возможности по рекуперации энергии из-за расчетных погрешностей на распределение крутящего момента от электродвигателя через редукторную и дифференциальную часть и их влияние на прямую связь между колесом и электродвигателем, неиспользование электрических возможностей электродвигателя для обеспечения функций систем антиблокировки колес ABS (Anti-lock Braking System), стабилизации устойчивости ESP (Electronic Stability Program, электронная система динамической стабилизации автомобиля) с возможностью электронной блокировки программного межколесного и межосевого дифференциала колес.
Технической проблемой является разработка схемы управления электромобилем с обеспечением схемы 4х4 с применением асинхронных мотор-колес, обеспечивающих работоспособность электрических систем антиблокировки колес ABS, стабилизации устойчивости ESP с возможностью электронной блокировки программного межколесного и межосевого дифференциала колес.
Техническим результатом является обеспечение безопасности, устойчивости и проходимости с повышенными возможностями преодоления пути в условиях бездорожья.
Технический результат достигается за счет того, что в известной системе управления полноприводным электромобилем, содержащей тормозную систему, асинхронные электродвигатели; блоки разделения крутящего момента и блоки управления тягой и стабилизацией, в соответствии с изобретением по крайней мере два асинхронных тяговых электродвигателя интегрированы в колеса транспортного средства по принципу мотор-колеса, блоки разделения крутящего момента, блок управления тягой и стабилизацией интегрированы в контроллеры асинхронных электродвигателей и количество таких контроллеров соответствует количеству применяемых электродвигателей, причем один из контроллеров выполнен мастер-контроллером, обрабатывающим данные с положения рулевой колонки, педалей скорости и тормоза, со всех контроллеров электродвигателей и выдающим сигналы управления на контроллеры электродвигателей, причем мастер-контроллер выполнен с возможностью перевода в ручном переключении на режим бездорожья принудительно вводя электродвигатели в режим синхронизации по крутящему моменту на колесах.
Тормозная система электромобиля имеет двухконтурную систему из электрического тормоза электродвигателя и механических элементов тормоза.
Каждый из контроллеров асинхронных электродвигателей выполнен с возможностью выполнения функции мастер-контроллера при подаче сигнала о неполадке или выходе из строя мастер контроллера.
Технический результат от использования всех существенных признаков заявляемого изобретения заключается в обеспечении повышения безопасности, устойчивости и проходимости автомобиля, снабженного заявляемой системой, с повышенными возможностями преодоления пути в условиях бездорожья.
За счет интеграции блоков разделения крутящего момента, управления тягой и стабилизацией в соответствующие контроллеры, управляющие каждым из асинхронных электродвигателей, выполнения одного из контроллеров мастер-контроллером, обрабатывающим данные с положения рулевой колонки, педалей скорости и тормоза, со всех контроллеров электродвигателей и выдающим сигналы управления на контроллеры электродвигателей, и возможностью перевода мастер-контроллера в ручном переключении на режим бездорожья позволяет обеспечить абсолютный контроль по всем параметрам (крутящий момент, мощность, скорость вращения, проскальзывания) на каждом колесе с корректировкой управления для каждого отдельно взятого колеса с реакцией в милисекундах.
Интеграция, по крайней мере, двух асинхронных тяговых электродвигателей в колеса транспортного средства по принципу мотор-колеса позволяет обеспечить введение всех колес в синхронизацию по крутящему моменту, обеспечивая, таким образом, программно одинаковое усилие на всех колесах, что приводит к повышению безопасности, устойчивости и проходимости автомобиля.
Абсолютный контроль позволяет управлять каждым колесом, как угодно. В частности, реализовывать различные алгоритмы управления, такие как,
1) ABS (Anti-lock Braking System – антиблокировочная система: система, предотвращающая блокировку колёс транспортного средства при торможении).
2) ESP (Electronic Stability Program – Электронный контроль или динамическая система стабилизации автомобиля: активная система безопасности автомобиля, позволяющая предотвратить занос посредством управления компьютером момента силы колеса (одновременно одного или нескольких)).
3) Terrain Control – система адаптации к дорожным условиям (песок, грязь, лед и т.д.).
4) Танковый режим разворота на месте – колеса по разным сторонам (левой и правой) транспортного средства вращаются в разные направления, обеспечивая разворот на месте.
5) И конечно, сама система движения по внедорожью, когда происходит синхронизация по крутящему моменту, обеспечивая таким образом программно одинаковое усилие на всех колесах.
Такой абсолютный контроль позволяет улучшать безопасность (абсолютный контроль при торможении, мгновенное перераспределения усилий на колесах при поворотах) и устойчивость (мгновенная стабилизация при проскальзывании одного из колес или нескольких в миллисекунды).
Сущность технического решения поясняется чертежами.
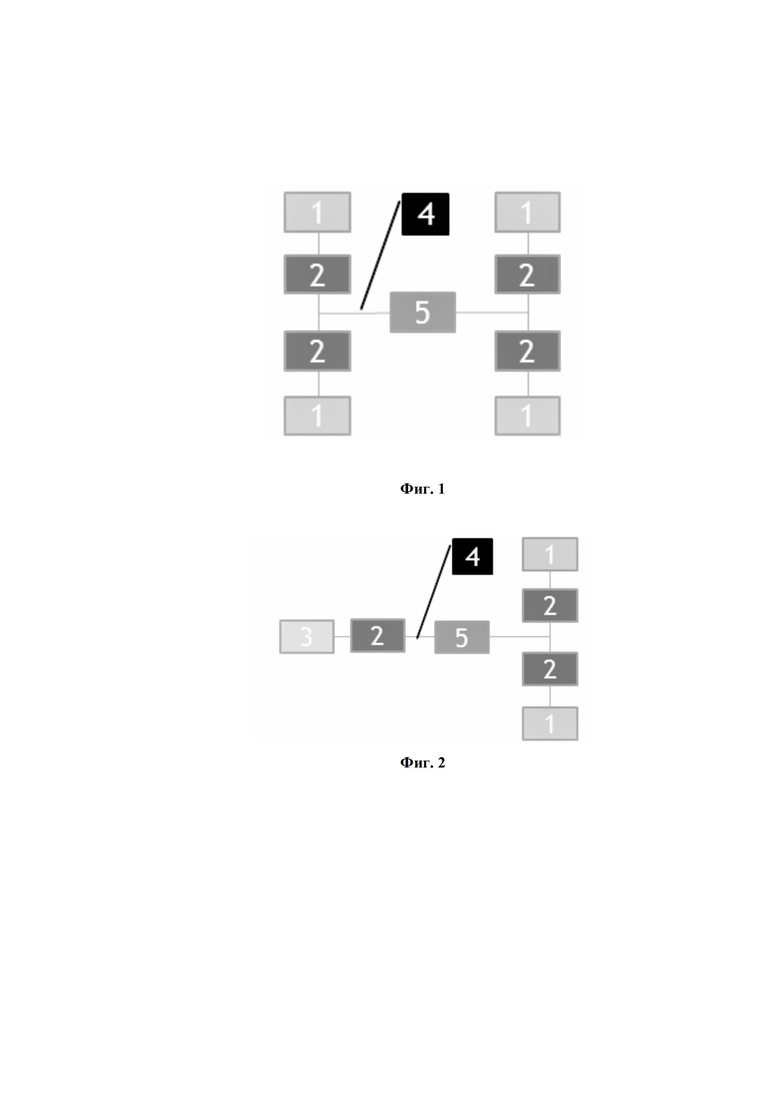
Фиг. 1 – принципиальная схема системы управления полноприводным автомобилем с четырьмя мотор-колесами;
Фиг. 2 - принципиальная схема системы управления полноприводным автомобилем с двумя мотор-колесами;
Фиг. 3 – схема управления одним асинхронным тяговым электродвигателем;
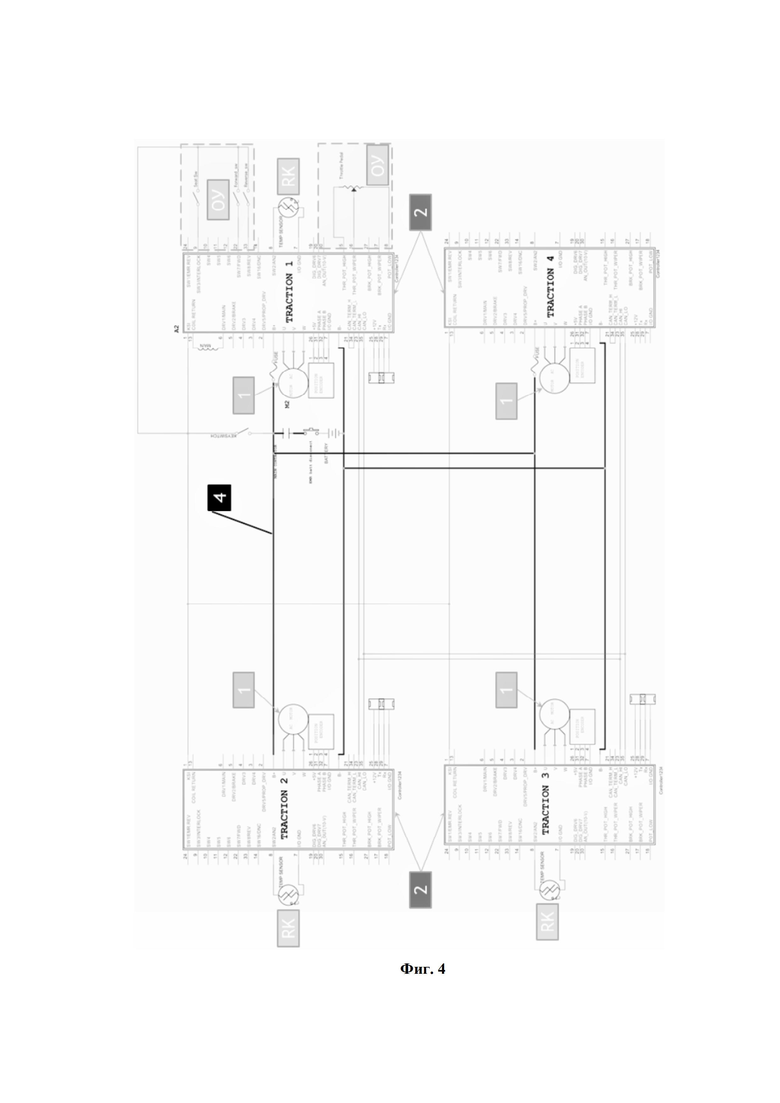
Фиг. 4 - схема подключения контроллеров мотор-колес по схеме 4х4,
где:
1. Асинхронное тяговое мотор-колесо;
2. Контроллер;
3. Тяговый асинхронный электродвигатель с редукторной частью;
4. CAN шина (Controller Area Network);
5. Батарея.
Для примера приведены два варианта исполнения управления электромобиля 4х4 (фиг. 1 и 2):
1) Схема применения 4 мотор-колес.
2) Схема применения 2 мотор-колес на задней или передней оси и электродвигателя с редукторной частью на передней или задней оси.
Обе схемы изображены на фиг. 1 и 2, где:
1) Схема применения 4 мотор-колес содержит четыре асинхронных тяговых мотор-колеса 1, представляющих собой асинхронные тяговые электродвигатели с внешним ротором, имеющим батарею 5 в качестве источника питания, управляемые посредством контроллеров 2, установленных для каждого электродвигателя и объединенные в одну систему через CAN шину 4.
2) Схема применения системы управления полноприводным электромобилем с двумя асинхронными тяговыми мотор-колесами на задней или передней оси и асинхронным электродвигателем с редукторной частью на передней или задней оси показана на фиг. 2. Система содержит два асинхронных тяговых мотор-колеса 1, каждый их которых представляет собой асинхронный тяговый электродвигатель с внешним ротором, и тяговый асинхронный электродвигатель 3 с редукторной частью. В качестве источника питания использована батарея 5. Управление всеми асинхронными электродвигателями осуществлено посредством контроллеров 2, установленных для каждого электродвигателя и объединенных в одну систему через CAN шину 4.
При подключении контроллеров 2 в одну систему через CAN шину 4, один из контроллеров берет на себя функции обработки информации и выдачи сигналов на остальные контроллеры по алгоритму в зависимости от получаемой информации от всех контроллеров о состоянии каждого колеса по скорости вращения, крутящему моменту, мощности, и является мастер-контроллером.
При выходе из строя мастер-контроллера система оповещает сигнально о неполадке и функция мастер-контроллера за счет программного перераспределения временно передается любому другому контроллеру асинхронных двигателей, а при невозможности такой передачи, переводит их в режим автономной работы.
Тормозная система электромобиля является двухконтурной: электрический тормоз асинхронных тяговых мотор-колес 1 и тягового электродвигателя 3 с редукторной частью и механический тормоз, работающий как совместно, так и раздельно от электрического тормоза асинхронных тяговых мотор-колес 1 и тягового электродвигателя 3 с редукторной частью. Основной тормозной цилиндр и гидравлическая магистраль, соединённая с основным цилиндром механического тормоза, являются типовыми, используемыми в легковых автомобилях, за исключением того, что тормозной цилиндр управляется от мастер-контроллера. Каждый контроллер 2 асинхронных двигателей системы выполнен в виде электронного блока на базе микроконтроллера. Он структурно состоит из двух блоков: следящего блока, отслеживающего показания датчиков скорости вращения колеса, крутящего момента, мощности и положения педалей акселератора и торможения, положения руля, и управляющего блока, выдающего управляющие сигналы на исполнительные органы – основной тормозной цилиндр и электродвигатели, на основании из заданного в него алгоритма и полученной с датчиков информации.
Рассмотрим пример работы системы управления полноприводным электромобилем. В данном примере рассматривается схема с двумя асинхронными тяговыми мотор-колесами и тяговым электродвигателем.
Исходное состояние – электромобиль стоит. Управление системой обеспечивается органами управления ОУ (фиг. 3, схема и описание приведены как пример для одного электродвигателя, управление остальными двигателями аналогично, см. фиг.4). Ниже приведена расшифровка обозначений, используемых на схеме:
Запускается система электромобиля нажатием переключателя напряжения SA1 (фиг. 3). Ток с батареи 5 поступает на контроллеры 2, которые входят в режим диагностики и при положительном результате замыкает контакты контактора K (фиг. 3).
Для движения в вперед или назад переводится переключатель направления SA2 (фиг. 3) из разомкнутого состояния (положения нейтрали) в положение коммутации вращения электротехнической машины M (фиг. 3) в асинхронных тяговых мотор-колесах 1 и тяговом электродвигателе 3 с редукторной частью в прямом или обратном направлении (вперед или назад).
При нажатии на педаль акселератора задействуется потенциометр акселератора RP1 (фиг. 3), сигнал с которого подается на мастер-контроллер 2, передающий параметры управления на остальные контроллеры 2 через CAN шину 4 с учетом положения руля, считываемого с датчика положения руля BR (фиг. 3), для коммутирования электротехнической машины M (фиг. 3) асинхронных тяговых мотор-колес 1 и тягового электродвигателя 3 с редукторной частью с батареи 5. В результате этого электромобиль начинает ускоряться.
Подведенная к статору электромотора мотор-колес 1 и электродвигателя 3 энергия переменного тока создает в нем первичное вращающееся магнитное поле, которое благодаря магнитному сцеплению с ротором наводит в его короткозамкнутых витках электрический ток для создания вторичного магнитного поля ротора.
Температуру обмоток статора и ротора в цели защиты их от перегрева отслеживают контроллеры 2 посредством опроса термодатчиков RK (фиг. 3) электротехнической машины M (фиг. 3) в асинхронных тяговых мотор-колесах 1 и тяговом электродвигателе 3 с редукторной частью по абсолютной температуре и градиенту его роста. При повышении температур выше критической зоны с учетом градиента роста контроллер 2 переводит работу электротехнической машины M в номинальные режимы работы (без перегрузок) до падения температуры до рабочей, после чего восстанавливает полную функциональность ее работы. Сам контроллер защищен от замыканий и непредвиденных скачков напряжений и токов предохранителем FU (фиг. 3).
В процессе движения контроллеры 2 каждого двигателя обрабатывают сигналы с электродвигателей в режиме реального времени.
При изменениях положения руля, имеющего датчик его положения BR (фиг. 3), мастер-контроллер перераспределяет крутящие моменты на колесах за счет управления асинхронными тяговыми мотор-колесами 1 и тяговым электродвигателем 3 с редукторной частью и обеспечивает устойчивость руления.
При проскальзывании одного или нескольких колес, изменения по крутящему моменту и скорости, считываемые контроллерами 2, обрабатываются мастер-контроллером, и мастер-контроллер передает управляющие данные по CAN шине 4 по управлению каждым асинхронным тяговым мотор-колесом 1 и тяговым электродвигателем 3 с редукторной частью для стабилизации устойчивости (система ESP), изменяя и перераспределяя крутящие моменты на колесах по заданному алгоритму.
При нажатии на педаль тормоза, задействуется потенциометр тормозного усилия RP2 (фиг. 3), значения от которого передается на мастер-контроллер и происходит обработка информации о нажатии. На основании данных о частоте вращения колеса и степени нажатия педали тормоза мастер-контроллер вычисляет момент торможения для каждого колеса в зависимости от положения руля и проскальзывания колес (система ABS), которые необходимо создать в сложившейся ситуации для обеспечения заданного водителем торможения. Если полученный момент торможения менее заданной в программе управления величины, мастер-контроллер даёт команду на изменение коммутации асинхронных тяговых мотор-колес 1 и тягового электродвигателя с редукторной частью 3 на режим генератора без задействования механического тормоза. Если полученный момент торможения больше заданной в алгоритме управления величины, происходит дополнительно механическое срабатывание главного тормозного цилиндра, приводящего в действие исполнительный тормозной цилиндр. В результате этого торможение осуществляется и механическим тормозом, и электродвигателями (генераторами). Причем механический тормоз является вторичным для добора тормозного усилия, которое полностью не обеспечивается электрическим тормозом асинхронных тяговых мотор-колес 1 и тягового электродвигателя с редукторной частью 3.
При отсутствии воздействий на педаль акселератора и педаль тормоза, блок управления не подаёт сигнал для коммутирования с батареи 5 асинхронных тяговых мотор-колес 1 и тягового электродвигателя 3 с редукторной частью и не создает магнитного поля электродвигателей. Статор и ротор не имеют физического контакта (через щетки, магниты и др.) и взаимодействуют только через магнитное поле и при его отсутствии достигается большой инерционный пробег транспортного средства из-за отсутствия электромагнитных и физических ограничений электромотора по его «выбегу».
Тем не менее, контроллеры 2 считывают данные о состоянии проскальзывания и при необходимости приводят асинхронные тяговые мотор-колеса 1 и тяговый электродвигатель 3 с редукторной частью в работу для стабилизации управления.
При необходимости вождения по бездорожью в режиме блокировки распределения крутящего момента на колеса, водитель в ручном режиме дает команду мастер-контроллеру на переход в соответствующий режим как описано далее по тексту. Для этого мастер-контроллер программно и принудительно осуществляет один из следующих вариантов воздействия:
- либо вводит все электродвигатели в режим синхронизации по крутящему моменту, обеспечивая режим электронной блокировки программного межколесного и межосевого дифференциала колес,
- либо вводит в режим синхронизации по крутящему моменту электромоторы электродвигателя 3 с редукторной частью, обеспечивая только режим электронной блокировки программного межосевого дифференциала колес,
- либо вводит в режим синхронизации по крутящему моменту только мотор-колеса 1 на оси, обеспечивая режим электронной блокировки программного межколесного дифференциала колес.
При схеме применения всех четырех мотор-колес программно и принудительно вводится их синхронизация либо объединенная (все сразу), либо попарная – между осями (межосевой дифференциал) или между колесами (межколесный дифференциал).
Эффективность работы системы управления полноприводным электромобилем подтверждена опытной эксплуатацией устройства, описанного в примере конкретной реализации. Опытная эксплуатация устройства показала, что предлагаемая схема обладает высокой энергоэффективностью, что отличает устройство от существующих аналогов, обеспечивает функции электрических систем антиблокировки колес ABS, стабилизации устойчивости ESP с возможностью электронной блокировки программного межколесного и межосевого дифференциала колес. Система позволяет снизить количество компонентой базы для достижения управляемости безопасности электромобиля и износ тормозной системы.
Этим подтверждается достижение технического результата изобретения.
Пример схемы подключения контроллеров мотор-колес по схеме 4х4 приведен на фиг. 4. Работа осуществляется аналогично приведенному выше описанию.
Заявленное изобретение может быть изготовлено с использованием известных электронных и аппаратных средств и использовано в области автомобилестроения для любых типов автомобилей – легковых, пассажирского, грузового транспорта и автомобилей специального назначения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2721861C1 |
| Асинхронный электропривод с интеграцией на редуктор и дифференциал | 2017 |
|
RU2681611C2 |
| Модульный электромобиль | 2018 |
|
RU2705863C1 |
| Асинхронное мотор-колесо с повышенным магнитным сцеплением | 2018 |
|
RU2706669C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2020 |
|
RU2726627C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| Генератор маховичный | 2017 |
|
RU2687242C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА, СНАБЖЕННОГО СУПЕРКОНДЕНСАТОРНОЙ ИЛИ ИОНИСТОРНОЙ БАТАРЕЕЙ | 2018 |
|
RU2704459C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ВЕДУЩИХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА С РАСШИРЕННЫМИ ФУНКЦИОНАЛЬНЫМИ ВОЗМОЖНОСТЯМИ | 2014 |
|
RU2558405C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ РАСШИРЕННЫХ ФУНКЦИОНАЛЬНЫХ ВОЗМОЖНОСТЕЙ | 2011 |
|
RU2473432C1 |

Изобретение относится к управлению тяговой системой транспортных средств с электротягой. Система управления полноприводным электромобилем содержит тормозную систему, асинхронные электродвигатели, блоки разделения крутящего момента и блоки управления тягой и стабилизацией. По крайней мере, два асинхронных тяговых электродвигателя интегрированы в колеса транспортного средства по принципу мотор-колеса. Блоки разделения крутящего момента, блок управления тягой и стабилизацией интегрированы в контроллеры асинхронных электродвигателей и количество таких контроллеров соответствует количеству применяемых электродвигателей. Причем один из контроллеров выполнен мастер-контроллером, обрабатывающим данные с положения рулевой колонки, педалей скорости и тормоза, со всех контроллеров электродвигателей и выдающим сигналы управления на контроллеры электродвигателей. Причем мастер-контроллер выполнен с возможностью перевода в ручном переключении на режим бездорожья, принудительно вводя электродвигатели в режим синхронизации по крутящему моменту на колесах. Технический результат заключается в повышении возможностей преодоления пути в условиях бездорожья. 2 з.п. ф-лы, 4 ил.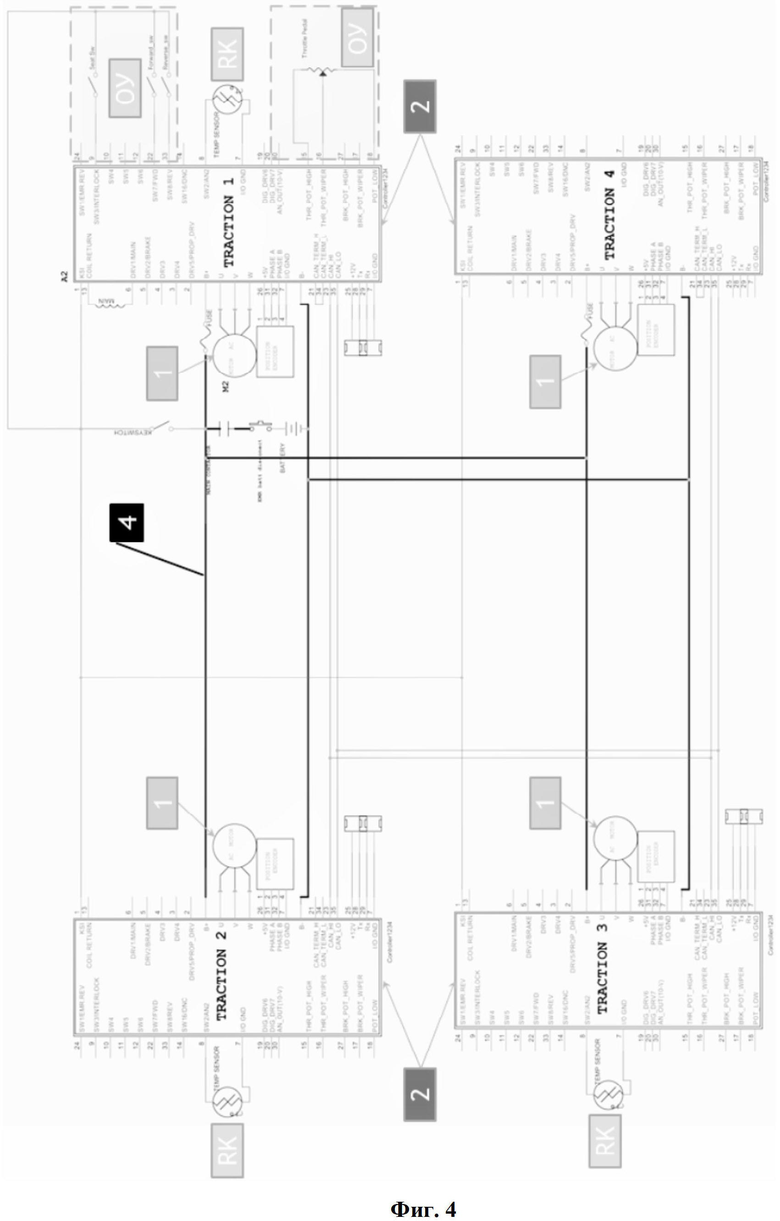
1. Система управления полноприводным электромобилем, содержащая тормозную систему, асинхронные электродвигатели; блоки разделения крутящего момента и блоки управления тягой и стабилизацией, отличающаяся тем, что по крайней мере два асинхронных тяговых электродвигателя интегрированы в колеса транспортного средства по принципу мотор-колеса, блоки разделения крутящего момента, блок управления тягой и стабилизацией интегрированы в контроллеры асинхронных электродвигателей и количество таких контроллеров соответствует количеству применяемых электродвигателей, причем один из контроллеров выполнен мастер-контроллером, обрабатывающим данные с положения рулевой колонки, педалей скорости и тормоза, со всех контроллеров электродвигателей и выдающим сигналы управления на контроллеры электродвигателей, причем мастер-контроллер выполнен с возможностью перевода в ручном переключении на режим бездорожья, принудительно вводя электродвигатели в режим синхронизации по крутящему моменту на колесах.
2. Система управления полноприводным электромобилем по п. 1, отличающаяся тем, что тормозная система электромобиля имеет двухконтурную систему из электрического тормоза электродвигателя и механических элементов тормоза.
3. Система управления полноприводным электромобилем по п. 1, отличающаяся тем, что каждый из контроллеров асинхронных электродвигателей выполнен с возможностью выполнения функции мастер-контроллера при подаче сигнала о неполадке или выходе из строя мастер-контроллера.
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2413635C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО АДАПТИВНОГО УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ЭЛЕКТРИЧЕСКОЙ ТРАНСМИССИЕЙ МНОГОПРИВОДНОГО КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2397088C1 |
| Приемник импульсных сигналов | 1960 |
|
SU141524A1 |
| US 2017113572 A1, 27.04.2017 | |||
| КЛЮЧ ГАЕЧНЫЙ ТОРЦОВЫЙ С ВНУТРЕННИМ КОНУСОМ | 2018 |
|
RU2684736C1 |

