Область техники
Настоящее изобретение относится к самоходной уборочной машине с передним сменным уборочным аппаратом, содержащей два расположенных со смещением в ее продольном направлении относительно сменного уборочного аппарата приводных вала привода ходовых механизмов, причем приводные валы кинематически связаны с проходящими вдоль двух сторон уборочной машины движущимися в ее продольном направлении гусеничными ходовыми механизмами, при этом в задней области уборочной машины предусмотрена задняя ходовая ось с задними колесами, управляемыми посредством устройства рулевого управления.
Уровень техники
Большинство рабочих машин, предназначенных для движения по почве, оснащены приводом хода в виде гусениц. При этом два ходовых механизма, выполненных в виде гусеничных ходовых механизмов, проходят с двух сторон от центральной продольной плоскости, по существу по всей длине рамы соответствующей рабочей машины. В этом случае движитель выполнен в виде стальной цепи, на которой шарнирно укреплены элементы ходовой поверхности или траки, которые в зависимости от назначения рабочей машины могут быть изготовлены из пластика или резины. Стальная цепь огибает звездочки и в области опорной поверхности прижимается опорными катками. При этом может быть предусмотрена цепная система, в которой две звездочки выполнены в виде направляющих катков, а дополнительная звездочка служит приводным колесом. В других цепных системах предусмотрены всего две звездочки, то есть одна звездочка служит приводным колесом или направляющим катком.
Кроме того, известны конструкции ходовых механизмов, в которых вместо снабженных траками цепей используются ходовые ленты из резинометаллического композиционного материала. В этом случае также между двумя установленными на несущей раме направляющими катками расположены упомянутые опорные катки, которые должны обеспечивать равномерное распределение нагрузки и лучшее приспособление к переменному рельефу почвы.
В прошлом указанные ходовые механизмы использовались, в частности, в уборочных машинах, выполненных в виде самоходных комбайнов для уборки риса. Благодаря выполнению ходового механизма в виде гусеничного механизма улучшается проходимость и характеристики сцепления уборочной машины, причем за счет большей опорной поверхности может быть также значительно снижено давление на почву. Вследствие этого такие ходовые механизмы находят все большее применение в самоходных уборочных машинах, которые выполнены, в частности, в виде зерноуборочных комбайнов или полевых измельчителей и оснащаются в своей передней части поднимаемым и опускаемым сменным уборочным аппаратом. После длительных периодов дождей подлежащие уборке поля в большинстве случаев становятся непроходимыми без соответствующих гусеничных ходовых механизмов или уборочная машина погружается в почву настолько глубоко, что оставляет глубокие колеи, и свойства почвы существенно ухудшаются. Поэтому такие ходовые механизмы стали использоваться также в комбайнах для уборки зерновых или рапса и в самоходных полевых измельчителях для уборки кукурузы и травы на силос, чтобы обеспечивать особенно бережную уборку несмотря на влажную и глубоко продавливаемую почву.
На своем конце, обращенном к сменному уборочному аппарату, в большинстве случаев эти уборочные машины оснащены приводной неуправляемой ходовой осью, тогда как неприводная ходовая ось на заднем конце снабжена управляемыми колесами с поворотными цапфами. При этом предусмотрены наполовину цепные системы, то есть одна из приводных ходовых осей вместо приводных колес снабжена гусеничными ходовыми механизмами, причем, как правило, они содержат профилированную бесконечную ленту.
Самоходные уборочные машины эксплуатируются на различных основаниях, то есть во время процесса уборки они передвигаются по полю, однако для подъезда к полю проходят относительно длинные участки по асфальтированным дорогам или по дорогам со стабилизированным основанием. Соответствующий гусеничный ходовой механизм, предпочтительно снабженный ходовой лентой, имеет тот существенный недостаток, что при маневрах машины между наружным профильным контуром движителей и основанием создаются крайне высокие усилия сдвига. При движении по асфальтированной дороге на криволинейных участках или на поворотах это вызывает повышенный износ ходовой ленты. В отличие от этого при движении по полю усилия сдвига вызывают срезание почвы, что также нежелательно, так как изменяет и ухудшает структуру почвы. Поэтому ходовые механизмы иногда снабжаются устройствами для изменения их опорной поверхности и тем самым улучшения маневренности уборочной машины, что позволяет снижать усилия срезания на поле, а при маневрах на поворотах уменьшать радиус круга поворота.
Оснащенная бесконечными ходовыми механизмами самоходная машина в соответствии с описанием в ограничительной части пункта 1 формулы изобретения известна из патентного документа DE 4193720 Т1. В документе описан самоходный комбайн с наполовину гусеничным ходом, в котором задняя ходовая ось снабжена управляемыми неприводными колесами. Ходовые системы с приводными колесами, которые приводятся с помощью двух приводных колес от передаточного механизма, а также направляющие и опорные катки расположены в первой вспомогательной раме, которая жестко соединена с главной рамой комбайна. Вторая вспомогательная рама, установленная на первой вспомогательной раме с возможностью поворота, несет заднюю ходовую ось. В зависимости от угла поворота колес задней ходовой оси приводится в действие так называемый цилиндр распределения веса, так что при рулевом воздействии задняя ходовая ось смещается посредством второй вспомогательной рамы в направлении к почве. За счет этого задний участок гусеничной ходовой системы поднимается от земли.
Далее, из патентного документа DE 102011114536 А1 известен оснащенный гусеничным ходовым механизмом комбайн, который в некоторых примерах выполнения также содержит заднюю ходовую ось с неприводными управляемыми колесами. При этом каждый гусеничный ходовой механизм содержит ходовую ленту, приводной каток, два направляющих катка и опорные катки. При дорожном движении и при изменении направления, то есть при рулевом управлении колесами задней ходовой оси комбайна, опорная поверхность каждой ходовой ленты должна быть уменьшена. Для этого опорные катки перемещаются к земле таким образом, что направляющие катки поднимаются от земли, так что ходовая лента находится в контакте с землей только в области опорных катков и лежащего между ними участка.
И наконец, из патентного документа DE 4016496 А1 известен гидростатический привод ходовой части гусеничного транспортного средства, в котором для привода каждой из ходовых гусениц предназначен гидромотор регулируемого объемного расхода. При этом питание гидромоторов различным количеством среды под давлением осуществляется через трубопроводы подачи среды под давлением от одного или нескольких гидронасосов. В данном документе исходная посылка состоит в том, что при приводе гусениц строительных машин привод хода управляется таким образом, что при равном передаточном отношении обоих гидростатических передаточных механизмов транспортное средство движется прямолинейно, а при подаче к гидромоторам различного количества масла транспортное средство движется по криволинейной траектории. Последнее достигается посредством соответствующего регулирования объемной подачи двух гидронасосов.
Раскрытие изобретения
Задачей настоящего изобретения является улучшение управляемости оснащенной сменным уборочным аппаратом уборочной машины указанного типа без изменения опорных поверхностей двух ходовых лент ходового механизма при движении по криволинейному пути или при поворотах уборочной машины.
Исходя из ограничительной части пункта 1 формулы изобретения, решение поставленной задачи обеспечивается отличительными признаками самоходной уборочной машины.
Согласно отличительной части пункта 1 каждый приводной вал должен приводиться посредством отдельного гидромотора гидростатического передаточного механизма, причем объемный расход каждого из двух гидромоторов является изменяемым в зависимости от передаваемого от устройства рулевого управления на управляемые задние колеса движения управления поворотом таким образом, что при одновременном рулевом управлении задними колесами достигается дополнительный момент поворота вокруг вертикальной оси уборочной машины. Для рулевого управления уборочной машиной необходим момент поворота вокруг вертикальной оси, который до сих пор в известных ходовых системах с наполовину гусеничным ходом создавался исключительно посредством поворотного движения заднего конца уборочной машины в результате рулевого управления колесами задней ходовой оси. При этом вследствие большой длины опорных поверхностей гусениц между ними и почвой создается момент, противодействующий создаваемому моменту поворота вокруг вертикальной оси и называемый моментом сопротивления повороту.
В соответствии с изобретением от передаточного механизма уборочной машины на правый и левый гусеничные ходовые механизмы передаются различные крутящие моменты, так что создается дополнительный момент поворота вокруг вертикальной оси, способствующий движению по криволинейной траектории. Для этого для каждого из приводных валов предназначен гидромотор гидростатического передаточного механизма, объемный расход которого изменяется в зависимости от движения управления поворотом, передаваемого от устройства рулевого управления на управляемые задние колеса. За счет этого достигается существенное улучшение поворотных характеристик уборочной машины, так что действующие на почву срезающие усилия могут быть также значительно снижены. Кроме того, преимущество состоит в том, что во время этого процесса поворота опорные поверхности гусеничных ходовых механизмов остаются неизменными, так что даже на поворотной полосе на краю убираемого поля могут достигаться достаточная тяга и низкое давление на почву. Иначе повороты в области края поля могли бы вызывать значительное повреждение почвы.
В решении по патентному документу DE 4193720 Т1 в самоходном комбайне с наполовину гусеничным ходом эта управляемость поворотом также должна улучшаться; однако для этого задняя область комбайна поднимается посредством того, что во время процесса рулевого управления управляемые колеса принимают на себя значительную долю нагрузки, а гусеничный ходовой механизм поднимается от почвы в области несущих и направляющих катков. Однако в результате этого управляемые задние колеса и приводной каток вследствие дополнительной воспринятой нагрузки во время управления поворотом чрезвычайно сильно вдавливаются в почву.
Также и в предусмотренной в патентном документе DE 102011114536 А1 системе для улучшения управляемости поворотом самоходного комбайна с наполовину гусеничным ходом уменьшаются опорные поверхности ходовых гусеничных лент, так что на оставшихся опорных поверхностях давление на почву повышается.
В приводной системе по патентному документу DE 4016496 А1 для гусеничного транспортного средства предусмотрен полностью гусеничный привод, то есть кроме гусениц в транспортном средстве нет управляемых колес на соответствующей управляемой ходовой оси. При этом посредством регулирования объемного расхода отдельных гидромоторов с помощью системы клапанов достигается настройка двух гидромоторов на одинаковую характеристику управления независимо от того, на какой из гусениц имеется более высокое сопротивление. За счет этого должно достигаться улучшенное прямолинейное движение гусеничного транспортного средства.
В следующем примере выполнения изобретения для каждого из приводных валов должен быть предназначен гидростатический передаточный механизм, рабочий контур которого соединен с гидронасосом изменяемой объемной подачи. Для этого рабочие контуры могут питаться одним общим гидронасосом. Благодаря отдельным предназначенным для каждого гусеничного ходового механизма гидростатическим передаточным механизмам с соответствующими регулируемыми гидронасосами и регулируемыми гидромоторами могут выгодным образом регулироваться передаточные числа и передаваемые приводные крутящие моменты двух гусеничных ходовых механизмов независимо друг от друга. При этом величины объемной подачи и/или объемного расхода, настраиваемые на гидронасосах и гидромоторах с помощью соответствующих устройств управления, задаются конкретным движением рулевого управления, которое передается не неприводные управляемые колеса задней ходовой оси.
Предпочтительно в соответствии с изобретением привод двух гусеничных ходовых механизмов должен быть выполнен таким образом, что каждый из гидромоторов приводит кинематически связанный с ним приводной вал посредством, по меньшей мере, двух передаточных ступеней переключаемого механического передаточного механизма. При этом соответствующий механический передаточный механизм может быть выполнен в виде передаточного компонента. В рамках соответствующей комбинации гидростатического передаточного механизма и механического передаточного механизма предусмотрено, что, по меньшей мере, механический передаточный механизм и, в определенных случаях, соответствующие гидромоторы объединены в общем конструктивном узле, служащем корпусом ходовой оси или передаточного механизма. Указанные, по меньшей мере, две переключаемые передаточные ступени механического передаточного механизма необходимы для удовлетворения требования перехода между максимальным тяговым усилием и соответствующими конечными скоростями движения. За счет использования этих переключаемых ступеней может быть уменьшена необходимая гидравлическая разводка, так что благодаря более эффективному гидравлическому приводу хода может быть улучшен его кпд. В отношении высоких общих передаточных отношений, требуемых при эксплуатации на поле, может использоваться гидравлическая аппаратура меньших размеров, что дает экономию веса и затрат.
Далее, в связи с этим предусмотрено, что механический передаточный механизм состоит из приводимого гидромотором главного вала с жестко укрепленными на нем приводными шестернями с различным числом зубьев, находящимися в зацеплении с передаточными шестернями. Передаточные шестерни свободно установлены на передаточном валу и могут избирательно соединяться с ним с помощью муфты переключения. Жестко соединенная с передаточным валом шестерня находится в зацеплении с приводной шестерней, причем эта приводная шестерня может быть расположена непосредственно на приводном валу гусеничного ходового механизма. При этом два приводных вала, выполненных соответствующим образом, могут нести тормозные диски тормозных устройств и предпочтительно связаны карданными валами с левым и правым гусеничными ходовыми механизмами уборочной машины. Соответствующие муфты переключения, служащие для избирательного соединения передаточных шестерен с передаточным валом, могут быть выполнены либо в виде простых кулачковых муфт, либо в виде кулачковых муфт, снабженных устройством синхронизированного переключения.
В следующем примере выполнения изобретения предусмотрено, что приводное колесо гусеничного ходового механизма приводится от приводного вала посредством концевого привода, выполненного в виде редуктора. Соответствующий редуктор может быть выполнен в виде цилиндрического зубчатого механизма с промежуточной шестерней. Кроме того, существует возможность выполнения редуктора в виде планетарного передаточного механизма с постоянным передаточным отношением.
И наконец, предусмотрено, что задняя ходовая ось содержит гидравлическую систему рулевого управления, для устройства рулевого управления предназначен приемник измеряемых величин для восприятия установленного угла поворота управляемых задних колес, при этом обеспечена возможность подачи соответствующего угла поворота в качестве действительной величины на блок регулирования, который подает заданные величины на устройства управления гидромоторами. На устройстве рулевого управления может быть предусмотрен задающий цилиндр, который подает заданные величины для привода в действие предусмотренного на задней ходовой оси цилиндра управления поворотом, выполненного в виде приемного цилиндра. Движения рулевого управления, которые выполняются водителем в кабине уборочной машины посредством рулевого колеса, должны восприниматься указанным приемником измеряемых величин и передаваться на блок регулирования. В зависимости от установленного угла поворота колес блок регулирования обеспечивает регулирование устройств управления гидромоторами.
Далее, блок регулирования может подавать заданные величины на устройства привода муфт переключения. Таким образом, блок регулирования может обеспечивать переключение муфт переключения.
При этом посредством каждой муфты переключения могут переключаться, по меньшей мере, две передаточные ступени между соответствующим гидромотором и соответствующим приводным валом.
Изобретение не ограничивается описанной комбинацией признаков независимого пункта 1 с признаками зависимых пунктов формулы изобретения. Кроме этого имеется множество возможностей комбинации отдельных признаков, которые указаны в пунктах формулы изобретения, описаны в качестве дающих преимущества, а также указаны в последующем описании примеров выполнения и показаны на чертежах. Использование позиций в описании примеров выполнения и ссылка на них в формуле изобретения ни в коей мере не ограничивает объема защиты, определяемого пунктами формулы изобретения.
Краткий перечень чертежей
Другие особенности изобретения будут ясны из последующего описания со ссылками на прилагаемые чертежи на которых в упрощенном виде показан пример выполнения изобретения. На чертежах:
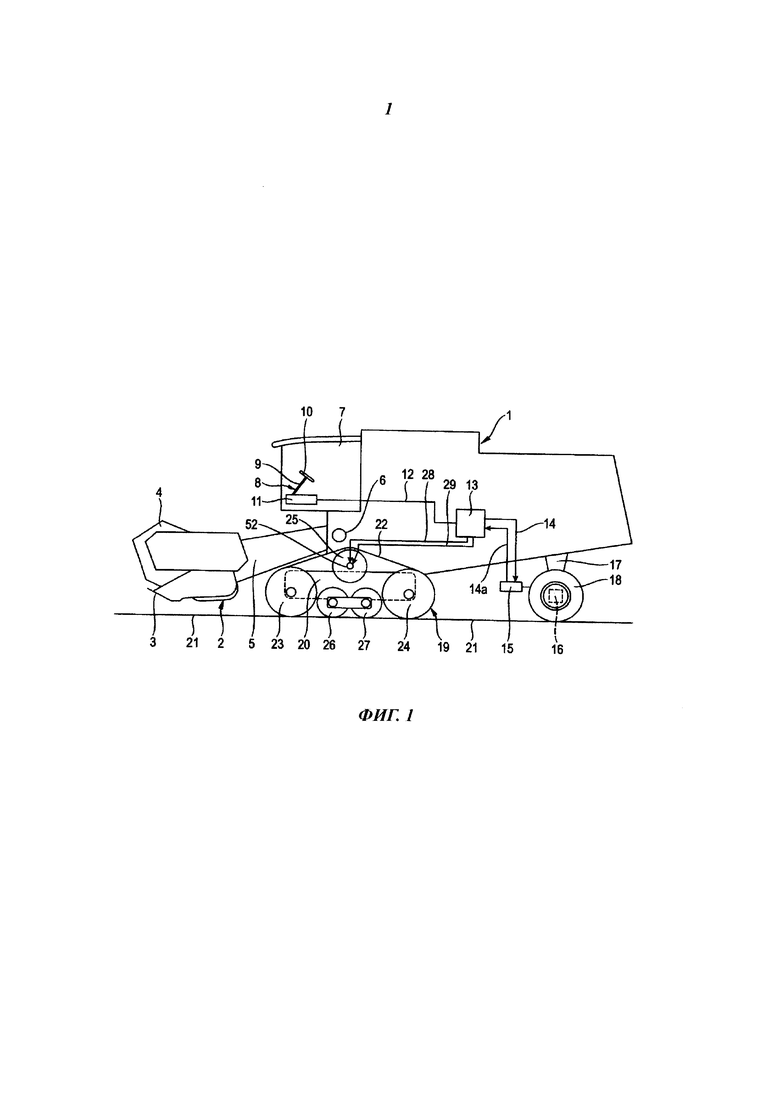
фиг. 1 схематично изображает на виде сбоку выполненную в виде зерноуборочного комбайна самоходную уборочную машину с двумя предусмотренными в комбайне гусеничными ходовыми механизмами;
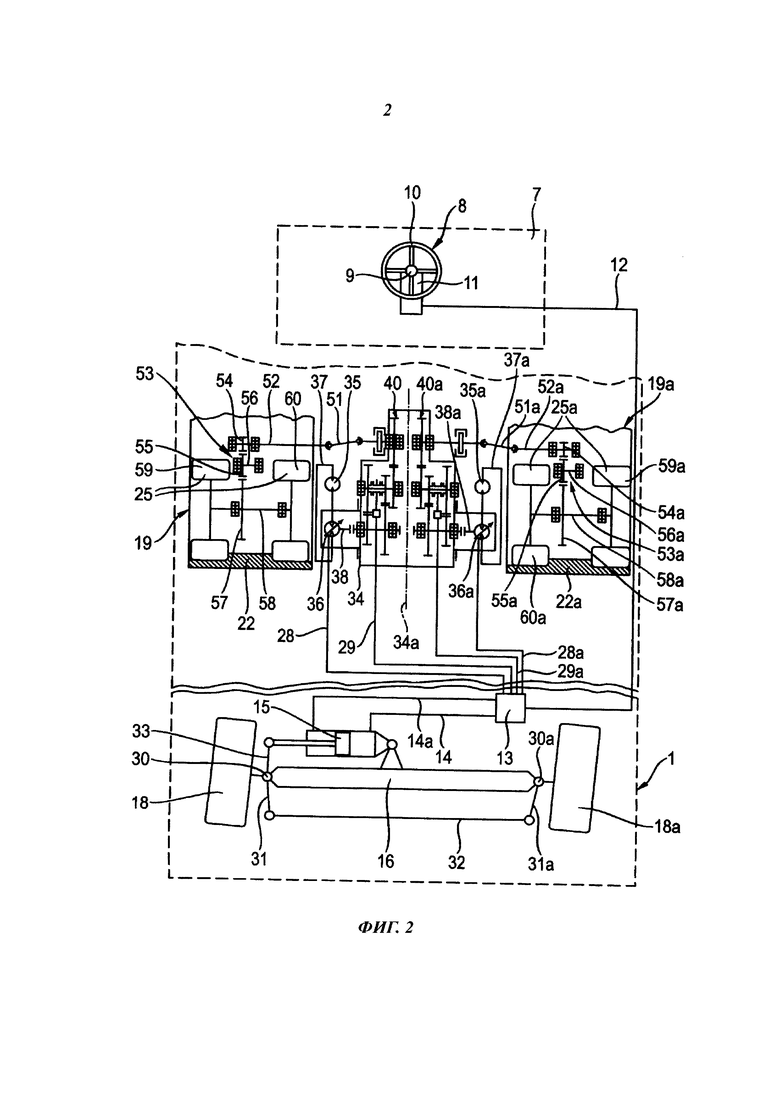
фиг. 2 схематично изображает на виде сверху систему рулевого управления и систему привода показанной на фиг. 1 самоходной уборочной машины в первом примере выполнения;
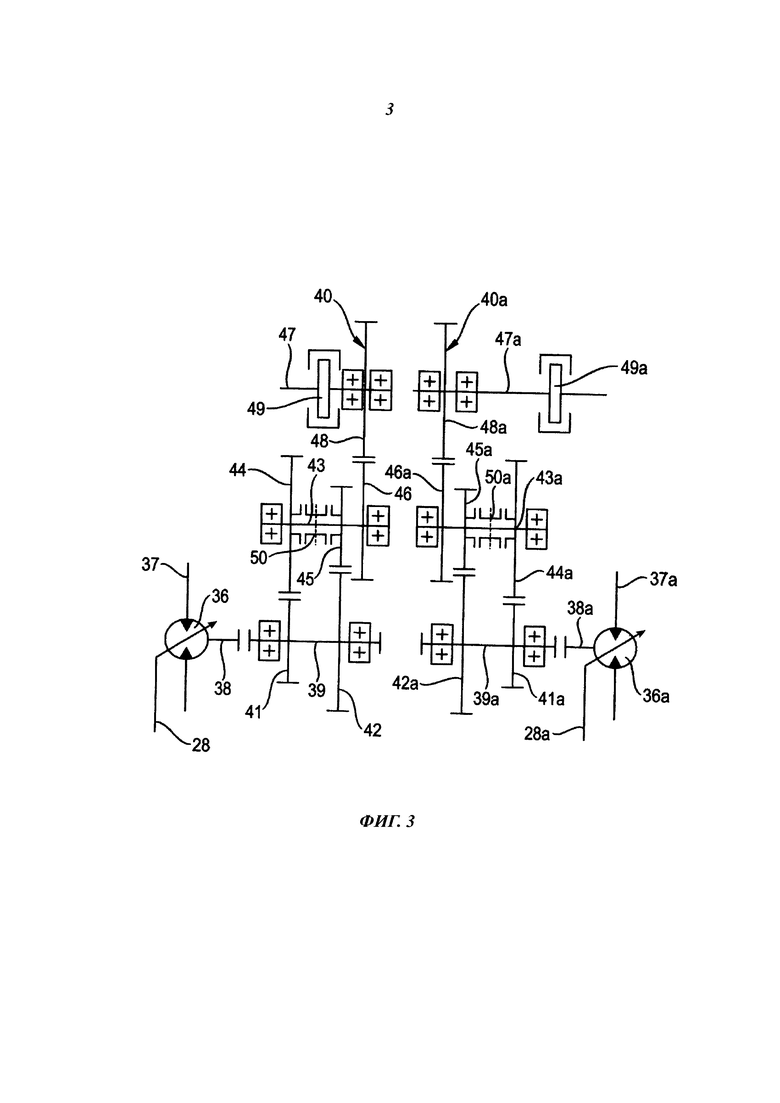
фиг. 3 схематично изображает на виде сверху систему рулевого управления и систему привода показанной на фиг. 1 самоходной уборочной машины во втором примере выполнения; и
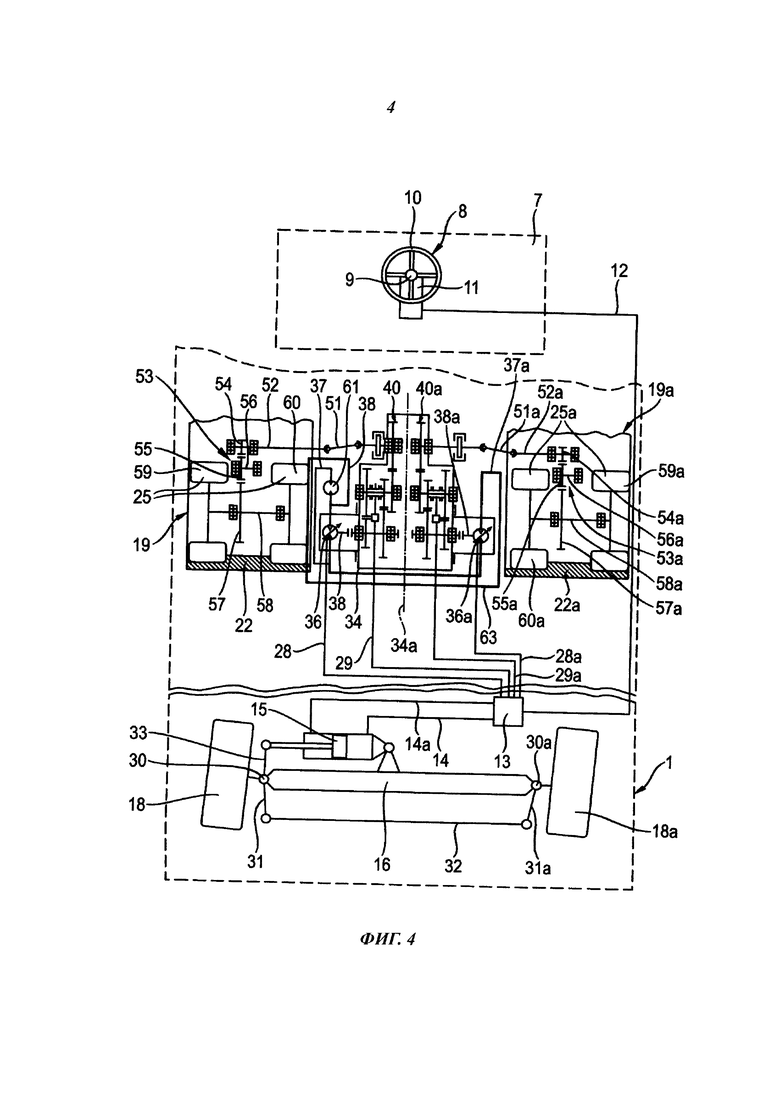
фиг. 4 изображает в увеличенном виде механический передаточный механизм, показанный на фиг. 2.
Осуществление изобретения
На фиг. 1 позицией 1 обозначена выполненная в виде самоходного зерноуборочного комбайна уборочная машина, оснащенная спереди сменным уборочным аппаратом 2, выполненным в виде жатвенного аппарата для уборки зерновых и рапса. Сменный уборочный аппарат в своем рабочем направлении снабжен режущим брусом 3 и мотовилом 4, которое может подниматься и опускаться относительно сменного уборочного аппарата 2. За сменным уборочным аппаратом 2 следует наклонный питатель 5, выполненный с возможностью подъема и опускания путем поворота вокруг оси 6 комбайна. Само собой разумеется, что вместо аппарата для уборки зерновых и рапса может быть предусмотрен уборочный аппарат любого другого вида, например, для уборки кукурузы, семенников трав, льняного семени, стручковых плодов и т.д. Кроме того, самоходная уборочная машина 1 может быть выполнена в виде самоходного полевого измельчителя со сменным уборочными аппаратами, таким как косилка, подборщик, кукурузная приставка и другими.
Далее, как видно на фиг. 1, самоходная уборочная машина 1 в области над наклонным питателем 5 оснащена кабиной 7 водителя, в которой, кроме прочего, находится устройство 8 рулевого управления, состоящее из расположенного на рулевой колонке 9 рулевого колеса 10 и датчика 11 угла поворота рулевого колеса. Вместо датчика 11 угла поворота рулевого колеса компонентом устройства 8 рулевого управления может быть также задающий цилиндр. От датчика 11 угла поворота рулевого колеса проходит первая линия 12 управления к блоку 13 регулирования, который обрабатывает введенную устройством 8 рулевого управления заданную величину, то есть поворотное движение рулевого колеса 10, и передает соответствующую заданную величину через вторую линию 14 управления на устройство 15 привода в действие рулевого управления. Соответствующая действительная величина передается от устройства 15 привода в действие рулевого управления через линию 14а управления на блок 13 регулирования. Как видно на фиг. 1, устройство 15 привода в действие рулевого управления расположено на задней ходовой оси 16, на которую опирается ходовая рама 17 самоходной уборочной машины 1. На этой задней ходовой оси 16 расположены управляемые задние колеса, из которых на виде сбоку по фиг. 1 видно только одно заднее колесо 18. Рулевое управление двумя задними колесами на задней ходовой оси 16 будет описано дальше со ссылкой на фиг. 2.
Далее, самоходная уборочная машина 1 содержит гусеничный ходовой механизм 19, который с помощью другой части 20 ходовой рамы передает по существу вес самоходной уборочной машины 1 на почву 21 убираемого поля. Гусеничный ходовой механизм 19 содержит бесконечную ходовую ленту 22, профилированную на своей наружной поверхности. Ходовая лента 22 огибает два направляющих катка 23 и 24 и приводное колесо 25. В области между двумя направляющими катками 23 и 24 ходовая лента 22, начиная от части 22 ходовой рамы, опирается на почву 21 с помощью опорных катков 26 и 27. Как видно на чертеже, блок 13 регулирования соединен задающими линиями 28 и 29 с приводом приводного колеса 25. Эти элементы привода предусмотрены в зеркальном расположении также на другой стороне самоходной уборочной машины 1, то есть на правой стороне по направлению движения машины.
Расположение соответствующих гусеничных ходовых механизмов 19 и 19а и их привод в соответствии с изобретением в первом примере выполнения показаны на фиг. 2. Конструктивные компоненты, которые пояснялись со ссылкой на фиг. 1, обозначены теми же позициями. Вначале будет описано рулевое управление задними колесами 18 и 18а, предусмотренными на задней ходовой оси 16. Задние колеса 18 и 18а с помощью поворотных цапф 30 и 30а установлены на задней ходовой оси 16 с возможностью поворота, причем поворотные цапфы 30 и 30а соединены друг с другом с помощью рычагов 31 и 31а рулевой трапеции и поперечной рулевой тяги 32. Далее, от поворотной цапфы 30 отходит рычаг 33 поворотной цапфы, который соединен с исполнительным устройством 15 рулевого управления, выполненным в виде приемного цилиндра.
Как уже объяснялось со ссылкой на фиг. 1, блок 13 регулирования связан двумя линиями 14 и 14а управления, выполненными в виде линий среды под давлением, с исполнительным устройством рулевого управления, причем в данном случае для блока 13 регулирования может быть предназначен гидравлический клапан рулевого управления. По двум линиям 14 и 14а управления производится избирательная подача давления в одну из полостей приемного цилиндра, то есть соответствующая настройка исполнительного устройства 15 рулевого управления. При этом изменение угла установки колес на задней ходовой оси 16 производится обычным образом с помощью рулевого колеса 10 в кабине 7 водителя. Этот измененный угол установки колес передается от связанного с рулевой колонкой 9 устройства 8 рулевого управления датчика 11 угла поворота рулевого колеса через первую линию 12 управления на блок 13 регулирования. Как уже пояснялось, от блока 13 регулирования отходят задающие линии, которые в пределах двух приводных узлов обозначены соответственно 28, 28а и 29, 29а и приводят к приводу двух гусеничных ходовых механизмов 19 и 19а. При этом внутри корпуса 34 ходовой оси или передаточного механизма предусмотрены раздельные узлы привода левого по направлению движения гусеничного ходового механизма 19 и правого по направлению движения гусеничного ходового механизма 19а. Таким образом, по обе стороны от оси 34а симметрии созданы два приводных узла зеркально симметричной конструкции. Она будет описана дальше применительно к обоим приводным узлам.
Два приводимых от не показанного двигателя внутреннего сгорания гидронасоса 35, 35а, которые могут быть выполнены в виде регулируемых насосов, питают средой под давлением два регулируемых по расходу гидромотора 36, 36а и включены в гидростатические рабочие контуры 37, 37а. Как гидронасос 35, 35а, так и соответствующий гидромотор 36, 36а могут содержать не показанную качающуюся шайбу, то есть быть регулируемым аксиально-поршневым насосом и регулируемым аксиально-поршневым мотором. От каждого гидромотора 36 и 36а выходит выходной вал, соответственно 38 и 38а.
Конструкция двух механических передаточных механизмов, размещенных в общем корпусе 34 ходовой оси или передаточного механизма, будет описана со ссылкой на фиг. 4. Как показано на чертеже, каждый гидромотор 36 и 36а жестко соединен с главным валом 39, 39а механического передаточного механизма 40, 4а. На главном валу 39, 39а жестко укреплены приводные шестерни 41, 41а и 42, 42а, которые зацепляются со свободно вращающимися передаточными шестернями 44, 44а и 45, 45а, установленными на передаточных валах 43, 43а. Между двумя передаточными шестернями 44 и 45 расположена муфта 50, 50а переключения, которая соединяет с передаточным валом 43, 43а одну из передаточных шестерен 44, 44а или 45, 45а. Таким образом, механический передаточный механизм 40 может переключаться на две различные передаточные ступени. Привод от передаточного вала 43, 43а осуществляется через жестко укрепленную на нем шестерню 46, 46а, которая зацепляется с приводной шестерней 46, 46а, жестко укрепленной на приводном валу 47, 47а. На приводном валу 47, 47а установлен тормозной диск 49, 49а тормозного устройства.
На фиг. 2 показано, что с приводным валом 47, 47а соединен карданный вал 51, 51а, который на другом конце шарнирно соединен с приводным валом 52, 52а. Далее, видно, что гусеничный ходовой механизм 19 содержит работающий в качестве редуктора концевой привод 53, 53а, который состоит из снабженного шестерней 54, 54а приводного вала 52, 52а, снабженного шестерней 55, 55а промежуточного вала 56, 56а и снабженного шестерней 57, 57а вала 58, 58а звездочек. При этом вал 58, 58а звездочек на своих концах соединен с ведущими звездочками 59, 59а и 60, 60а, которые взаимодействуют с соединением по замкнутому контуру с внутренним периметром бесконечных ходовых лент 22, 22а и тем самым образуют приводное колесо 25, 25а, упомянутое при описании фиг. 1.
За счет этого вместе с предпринимаемым на задней ходовой оси 16 рулевым поворотом производится регулирование объемного расхода двух гидромоторов 36 и 36а таким образом, что вследствие различных передаваемых на гусеничные ходовые механизмы 19 и 19а приводных крутящих моментов вокруг вертикальной оси самоходной уборочной машины 1 создается момент, который приводит к снижению момента сопротивления повороту. При этом благодаря использованию двух механических передаточных механизмов 40 и 40а, относящихся соответственно к гусеничным ходовым механизмам 19 и 19а, может быть уменьшена необходимая гидравлическая разводка.
На фиг. 4 система рулевого управления и привода показана во втором примере выполнения. Уже описанные со ссылкой на фиг. 2 компоненты обозначены теми же позициями. Система рулевого управления и привода в соответствии со вторым примером выполнения отличается от первого примера по фиг. 2 только тем, что предусмотрен один гидронасос 61, который питает средой под давлением оба гидромотора 36, 36а. Гидронасос 61 питает по линии 62 гидромотор 36 в гидростатическом рабочем контуре 37 и гидромотор 36а в гидростатическом рабочем контуре 37а. По обратной линии 63 и 64 среда под давлением поступает обратно к гидронасосу 61.
Перечень позиций
1 Самоходная уборочная машина
2 Сменный уборочный аппарат
3 Режущий брус
4 Мотовило
5 Наклонный питатель
6 Ось поворота
7 Кабина водителя
8 Устройство рулевого управления
9 Рулевая колонка
10 Рулевое колесо
11 Датчик угла поворота рулевого колеса
12 Первая линия управления
13 Блок регулирования
14, 14а Вторая линия управления
15 Исполнительное устройство рулевого управления
16 Задняя ходовая ось
17 Рама
18 Заднее колесо
18а Заднее колесо
19, 19а Гусеничный ходовой механизм
20 Часть ходовой рамы
21 Почва
22, 22а Ходовая лента
23 Направляющий каток
24 Направляющий каток
25, 25а Приводное колесо
26 Опорный каток
27 Опорный каток
28, 28а Задающая линия
29, 29а Задающая линия
30, 30а Поворотная цапфа
31, 31а Рычаг рулевой трапеции
32 Поперечная рулевая тяга
33 Рычаг поворотной цапфы
34 Корпус ходовой оси или передаточного механизма
34а Ось симметрии
35,35а Гидронасос
36,36а Гидромотор
37, 37а Гидростатический рабочий контур
38, 38а Выходной вал
39, 39а Главный вал
40, 40а Механический передаточный механизм
41,41а Приводная шестерня
42, 42а Приводная шестерня
43, 43а Передаточный вал
44, 44а Передаточная шестерня
45, 45а Передаточная шестерня
46, 46а Шестерня вала 43, 43а
47, 47а Приводной вал
48, 48а Приводная шестерня
49, 49а Тормозной диск
50, 50а Муфта переключения
51, 51а Карданный вал
52, 52а Приводной вал
53,53а Концевой привод
54,54а Шестерня
55, 55а Шестерня промежуточного вала 56, 56а
56, 56а Промежуточный вал
57, 57а Шестерня вала 58, 58а звездочек
58, 58а Вал звездочек
59,59а Звездочка
60,60а Звездочка
61 Гидронасос
62 Питающая линия
63 Обратная линия
64 Обратная линия.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2469878C2 |
| УПРАВЛЯЕМЫЙ ГУСЕНИЧНЫЙ ХОДОВОЙ МЕХАНИЗМ СЕЛЬСКОХОЗЯЙСТВЕННОГО РАБОЧЕГО ТРАНСПОРТНОГО СРЕДСТВА И СЕЛЬСКОХОЗЯЙСТВЕННОЕ РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2677408C2 |
| РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2005 |
|
RU2297355C2 |
| САМОХОДНАЯ СТРОИТЕЛЬНАЯ МАШИНА | 2012 |
|
RU2600253C2 |
| МОСТ ВЕДУЩИЙ ГУСЕНИЧНОЙ УБОРОЧНОЙ МАШИНЫ | 2011 |
|
RU2493997C2 |
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
| СНЕГОХОД | 2010 |
|
RU2445226C1 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ УБОРОЧНОЙ МАШИНЫ | 2003 |
|
RU2359446C2 |
| Стенд для имитационного испытания системы управления беспилотным зерноуборочным комбайном | 2020 |
|
RU2728860C1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
Изобретение относится к самоходной уборочной машине. Самоходная уборочная машина с передним сменным уборочным аппаратом содержит два расположенных со смещением в ее продольном направлении относительно сменного уборочного аппарата приводных вала привода ходовых механизмов. Приводные валы кинематически связаны с проходящими с обеих сторон уборочной машины в ее продольном направлении гусеничными ходовыми механизмами. В задней области уборочной машины предусмотрена задняя ходовая ось с задними колесами. Устройство рулевого управления обеспечивает возможность изменения движения управления поворотом, передаваемого на задние колеса. Каждый приводной вал выполнен с возможностью привода посредством отдельного гидромотора гидростатического передаточного механизма. Каждый из гидромоторов выполнен с возможностью привода соответствующего приводного вала посредством двух передаточных ступеней переключаемого механического передаточного механизма. Достигается улучшение управляемости уборочным аппаратом уборочной машины при движении по криволинейному пути или при поворотах уборочной машины. 10 з.п. ф-лы, 4 ил.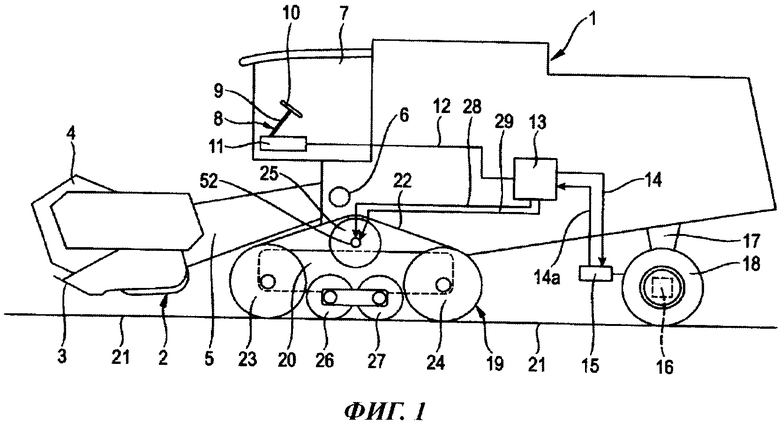
1. Самоходная уборочная машина (1) с передним сменным уборочным аппаратом (2), содержащая два расположенных со смещением в ее продольном направлении относительно сменного уборочного аппарата (2) приводных вала (52, 52а) привода ходовых механизмов, причем приводные валы (52, 52а) кинематически связаны с проходящими с обеих сторон уборочной машины (1) в ее продольном направлении гусеничными ходовыми механизмами (19, 19а), при этом в задней области уборочной машины (1) предусмотрена задняя ходовая ось (16) с задними колесами (18, 18а), управляемыми посредством устройства (8) рулевого управления, причем обеспечена возможность изменения движения управления поворотом, передаваемого на задние колеса (18, 18а) от устройства (8) рулевого управления, отличающаяся тем, что каждый приводной вал (52, 52а) выполнен с возможностью привода посредством отдельного гидромотора (36, 36а) гидростатического передаточного механизма, причем объемный расход каждого из двух гидромоторов (36, 36а) является изменяемым в зависимости от передаваемого от устройства (8) рулевого управления на управляемые задние колеса (18, 18а) движения управления поворотом таким образом, что при одновременном рулевом управлении задними колесами (18, 18а) достигается дополнительный момент поворота вокруг вертикальной оси уборочной машины (1), при этом каждый из гидромоторов (36, 36а) выполнен с возможностью привода соответствующего приводного вала (52, 52а) посредством, по меньшей мере, двух передаточных ступеней переключаемого механического передаточного механизма (40, 40а).
2. Самоходная уборочная машина по п. 1, отличающаяся тем, что для каждого из приводных валов (52, 52а) предназначен гидростатический передаточный механизм, рабочий контур (37, 37а) которого соединен с гидронасосом (35, 35а) изменяемой объемной подачи.
3. Самоходная уборочная машина по п. 1, отличающаяся тем, что каждый механический передаточный механизм (40, 40а) выполнен в виде передаточного компонента.
4. Самоходная уборочная машина по п. 3, отличающаяся тем, что каждый механический передаточный механизм (40, 40а) состоит из приводимого гидромотором (36, 36а) главного вала (39, 39а) с жестко укрепленными на нем приводными шестернями (41, 42, 41а, 42а) с различным числом зубьев, находящимися в зацеплении с передаточными шестернями (44, 45, 44а, 45а), которые свободно установлены на передаточном валу (43, 43а) с возможностью избирательного соединения с ним с помощью муфты (50, 50а) переключения, при этом жестко соединенная с передаточным валом (43, 43а) шестерня (46, 46а) находится в зацеплении с приводной шестерней (48, 48а), по меньшей мере, опосредованно связанной с приводным валом (52, 52а) гусеничного ходового механизма (19, 19а).
5. Самоходная уборочная машина по п. 1, отличающаяся тем, что приводное колесо (25, 25а) гусеничного ходового механизма (19, 19а) выполнено с возможностью привода от приводного вала (52, 52а) посредством концевого привода (53, 53а), выполненного в виде редуктора.
6. Самоходная уборочная машина по п. 5, отличающаяся тем, что соответствующий концевой привод (53, 53а) выполнен в виде цилиндрического зубчатого механизма с промежуточной шестерней (55, 55а).
7. Самоходная уборочная машина по п. 5, отличающаяся тем, что концевой привод (53, 53а) выполнен в виде планетарного передаточного механизма с постоянным передаточным отношением.
8. Самоходная уборочная машина по п. 1, отличающаяся тем, что на каждом приводном валу (47, 47а) механического передаточного механизма (40, 40а) расположено тормозное устройство (49, 49а).
9. Самоходная уборочная машина по п. 1, отличающаяся тем, что задняя ходовая ось (16) содержит гидравлическую систему рулевого управления, причем для устройства (8) рулевого управления предназначен приемник (11) измеренной величины для восприятия заданного угла поворота управляемых задних колес (18, 18а), при этом обеспечена возможность подачи соответствующего угла поворота в качестве действительной величины на блок (13) регулирования, который подает заданные величины на устройства управления гидромоторами (36, 36а).
10. Самоходная уборочная машина по п. 9, отличающаяся тем, что блок (13) регулирования подает заданные величины на устройства привода муфт (50, 50а) переключения.
11. Самоходная уборочная машина по п. 10, отличающаяся тем, что посредством каждой муфты (50, 50а) переключения обеспечена возможность переключения, по меньшей мере, двух передаточных ступеней между соответствующим гидромотором (36, 36а) и соответствующим приводным валом (52, 52а).
| DE 19517571 A1, 23.11.1995 | |||
| US 5191952 A, 09.03.1993 | |||
| DE 102011114536 A1, 04.04.2013 | |||
| US 2007029118 A1, 08.02.2007 | |||
| DE 4016496 A1, 28.11.1991. |

