Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для принятия предохранительной меры в электрическом инструменте, охарактеризованному в п.1 формулы изобретения, а также к способу принятия предохранительной меры в электрическом инструменте, охарактеризованному в п.8 формулы изобретения.
Уровень техники
Современные электрические инструменты необходимо оснащать специальными предохранительными механизмами, предназначенными для защиты оператора электрического инструмента при непредвиденном событии. Такое событие может заключаться, например, в блокировке или заклинивании рабочего инструмента (такой случай специалисты называют термином "обратный удар" (англ. "kickback")). Если не предусмотрено никакого предохранительного механизма, то при таком происшествии оператор может получить тяжелые травмы. С другой стороны, предусматриваемые предохранительные механизмы должны быть экономичными и простыми в осуществлении.
Один подход для решения задачи защиты оператора уже был раскрыт ранее в публикации DE 102004004170 А1 от 18.08.2005, относящейся к способу отключения электрической ручной машины в случае блокировки рабочего инструмента и к такой электрической ручной машине. Однако согласно этому подходу обнаружение "обратного удара" ограничено анализом частоты вращения. Такое решение дает только ограниченную предохранительную функцию, так как такой анализ невозможно применять с достаточной гибкостью в различных условиях эксплуатации, и, кроме того, также по-прежнему требуются большие затраты за счет того, что для определения частоты вращения требуются дорогие компоненты.
Раскрытие изобретения
Задача настоящего изобретения состоит таким образом в создании лучшей возможности для принятия предохранительной меры в электрическом инструменте.
Указанная задача решается в устройстве для принятия предохранительной меры в электрическом инструменте, охарактеризованном в п.1 формулы изобретения, а также в способе принятия предохранительной меры в электрическом инструменте, охарактеризованном в п.8 формулы изобретения. В зависимых пунктах формулы изобретения приведены дополнительные варианты осуществления изобретения.
Объектом настоящего изобретения является для принятия предохранительной меры с целью защиты оператора от обратного удара при блокировке или заклинивании рабочего инструмента электрического инструмента, содержащего электродвигатель с по меньшей мере одной обмоткой возбуждения и обмоткой якоря, содержащее
- сенсорный блок, выполненный с возможностью формирования сигнала сенсора в зависимости от тока, проходящего через электродвигатель, напряжения на обмотке якоря, напряжения на обмотке возбуждения и/или частоты коммутации в обмотке якоря;
- блок обнаружения изменения сигнала сенсора, выполненный с возможностью обнаружения временного изменения сигнала сенсора и выдачи на основании обнаруженного изменения соответствующего характеризующего изменение сигнала;
- блок безопасности, выполненный с возможностью обнаружения блокировки или заклинивания и принятия предохранительной меры в электрическом инструменте в зависимости от значения характеризующего изменение сигнала, прежде всего если значение указанного характеризующего изменение сигнала превысило пороговое значение или упало ниже порогового значения таким образом, чтобы прервать подачу питания в электрическом инструменте, запустить механическое торможение электрического инструмента, запустить электрическое или электромеханическое торможение электрического инструмента и/или заблокировать электрический инструмент с помощью механического или электрического устройства.
Настоящее изобретение основано на осознании того, что при помощи простого съема параметров работы двигателя, таких как ток двигателя, напряжение на обмотке якоря, напряжение на обмотке возбуждения и/или частота коммутации в обмотке якоря, можно определять состояние нагрузки электрического инструмента. Преимущество этого состоит в том, что не требуются дорогостоящие датчики для определения частоты вращения вала двигателя или иные специальные схемы. Кроме того, при помощи определения временного изменения сигнала сенсора в различных сценариях работы можно обнаруживать случай блокировки или заклинивания рабочего инструмента при увеличении значения сигнала выше порогового значения или уменьшении значения сигнала ниже порогового значения. К примеру, это позволяет лучше проводить различие между заклиниванием или блокировкой рабочего инструмента, с одной стороны, при медленной скорости работы, а с другой стороны, - при высокой скорости работы. Это следует из того, что для срабатывания предохранительной функции важно лишь временное изменение состояния нагрузки электрического инструмента, а не соответствующие абсолютные параметры. Таким образом, предлагаемое решение позволяет, с одной стороны, благодаря использованию простых точек съема (отвода) сигналов в электродвигателе электрического инструмента добиться экономически эффективной аппаратной реализации, а с другой стороны, обеспечить очень точный запуск предохранительной меры при возникновении опасного состояния, дающий возможность быстро затормозить электрический инструмент и таким образом надежно защитить оператора от получения травм.
В частном варианте осуществления изобретения блок обнаружения изменения сигнала сенсора и/или блок безопасности выполнены с возможностью осуществления цифровой обработки сигналов. Преимущество этого состоит в том, что для осуществления в действие предохранительной меры одновременно можно использовать цифровые схемы, уже многократно используемые для управления электрическим инструментом. Одновременно предлагается возможность использования компонентов цифровой техники, чтобы сделать запуск предохранительной меры очень надежным и уверенным также при проявлениях старения электронных компонентов и одновременно гарантировать высокую точность и постоянство срабатывания предохранительной меры.
Предпочтительно также, если блок обнаружения изменения сигнала сенсора выполнен с возможностью осуществления фильтрации сигнала сенсора перед обнаружением временного изменения сигнала сенсора. Преимущество этого состоит в возможности подавления или по меньшей мере уменьшения возможных помех, действующих на сигнал сенсора, что позволяет обеспечить высокую точность при запуске предохранительной меры. Таким образом устраняется или по меньшей мере уменьшается вероятность нежелательного запуска предохранительной меры и связанные с этим проблемы для оператора.
Кроме того, блок обнаружения изменения сигнала сенсора может быть выполнен с возможностью осуществления фильтрации сигнала сенсора на основе линейной, нелинейной и/или весовой фильтр-функции или проведения в его отношении преобразования Фурье. Это дает возможность при использовании цифровых компонентов гарантировать высокую точность при анализе сигнала сенсора. Одновременно путем использования преобразования Фурье также можно осуществить разложение сигнала сенсора на его частотные компоненты, что дает возможность, в частности при регистрации частоты коммутации в обмотке якоря электродвигателя, обнаруживать быстрое изменение частоты и, как следствие, запуск предохранительной меры может осуществляться с более коротким временем реакции. В этой связи особенно предпочтительным является применение быстрого преобразования Фурье (БПФ), которое дает возможность провести очень быстрое преобразование.
Кроме того, в еще одном варианте осуществления изобретения сенсорный блок выполнен с возможностью формирования второго сигнала сенсора, отличного от сигнала сенсора, в зависимости от тока, проходящего через электродвигатель, напряжения на обмотке якоря, напряжения на обмотке возбуждения и/или частоты коммутации в обмотке якоря. Кроме того, в этом варианте осуществления изобретения блок обнаружения изменения сигнала сенсора может быть выполнен с возможностью обнаружения временного изменения второго сигнала сенсора и выдачи, на основании обнаруженного изменения, соответствующего второго характеризующего изменение сигнала. Наконец, в этом варианте осуществления изобретения блок безопасности может быть выполнен с возможностью принятия предохранительной меры в электрическом инструменте в случае, если одновременно значение характеризующего изменение сигнала превысило соответствующее пороговое значение или упало ниже порогового значения и значение второго характеризующего изменение сигнала превысило второе пороговое значение или упало ниже второго порогового значения. Это дает возможность гарантировать дополнительную защиту против ошибочного запуска предохранительной меры, так как этот запуск в этом случае происходит только при переходе вверх или вниз через два пороговых значения. Поэтому данный вариант осуществления изобретения более устойчив к помехам, влияющим на сигнал сенсора или на указанный второй сигнал сенсора.
Кроме того, в другом варианте осуществления изобретения блок безопасности может быть выполнен с возможностью использования при принятии предохранительной меры порогового значения, зависящего от сигнала сенсора, или порогового значения, устанавливаемого извне. Это, с одной стороны, дает возможность обеспечить переустанавливаемые изменяемые пороговые значения безопасности, в которых также учитывается перегрузка машины. Кроме того, за счет соединения пороговых значений с сигналом сенсора, например, можно устанавливать меньшие пороги обнаружения для того чтобы обеспечивать своевременное затормаживание электрического инструмента при более высокой скорости работы. Также возможно, что оператор может устанавливать специальное пороговое значение по своему усмотрению, когда он, например, работает в особой рабочей обстановке. Подводя итог вышеизложенному, можно сказать, что за счет использования изменяемых пороговых значений может быть повышена безопасность оператора электрического инструмента.
В еще одном варианте осуществления изобретения сенсорный блок может быть выполнен с возможностью регистрации положения электрического инструмента и/или состояния зажатия рабочего инструмента, закрепленного в электрическом инструменте, при этом блок безопасности выполнен с возможностью использования при принятии предохранительной меры порогового значения, зависящего от зарегистрированного положения электрического инструмента и/или состояния зажатия рабочего инструмента, закрепленного в электрическом инструменте. Преимущество этого состоит в том, что при определении порогового значения учитываются различные положения электрического инструмента (например, при выполнении работ над головой) и/или различные состояния зажатия рабочего инструмента (например, более толстое или более тонкое сверло (бур), или обломленный шлифовальный круг угловой шлифовальной машины). Вследствие этого опять же дополнительно повышается безопасность оператора, причем от него для этого не требуется совершать каких-либо действий.
Объектом изобретения является также способ принятия предохранительной меры с целью защиты оператора от обратного удара при блокировке или заклинивании рабочего инструмента электрического инструмента, содержащего электродвигатель с по меньшей мере одной обмоткой возбуждения и обмоткой якоря, включающий
- формирование сигнала сенсора в зависимости от тока, проходящего через электродвигатель, напряжения на обмотке якоря, напряжения на обмотке возбуждения и/или частоты коммутации в обмотке якоря;
- обнаружение временного изменения сигнала сенсора и выдачу соответствующего характеризующего изменение сигнала на основе обнаруженного изменения; и
- принятие при обнаружении блокировки или заклинивания предохранительной меры в электрическом инструменте, если значение характеризующего изменение сигнала превысило пороговое значение или упало ниже порогового значения таким образом, чтобы прервать подачу питания в электрическом инструменте, запустить механическое торможение электрического инструмента, запустить электрическое или электромеханическое торможение электрического инструмента и/или заблокировать электрический инструмент с помощью механического или электрического устройства.
Реализация изобретения в виде компьютерной программы с программным кодом для осуществления предлагаемого способа при выполнении указанной программы на компьютере дает возможность использовать управление принятием предохранительной меры посредством уже часто имеющихся в электрическом инструменте интегральных схем или малых ЭВМ одновременно для управления срабатыванием предохранительной меры, что таким образом положительно сказывается на снижении издержек.
Далее изобретение более подробно рассматривается на примерах его осуществления со ссылками на прилагаемые чертежи,
где на фиг.1 - принципиальная схема предложенного устройства в одном варианте осуществления изобретения;
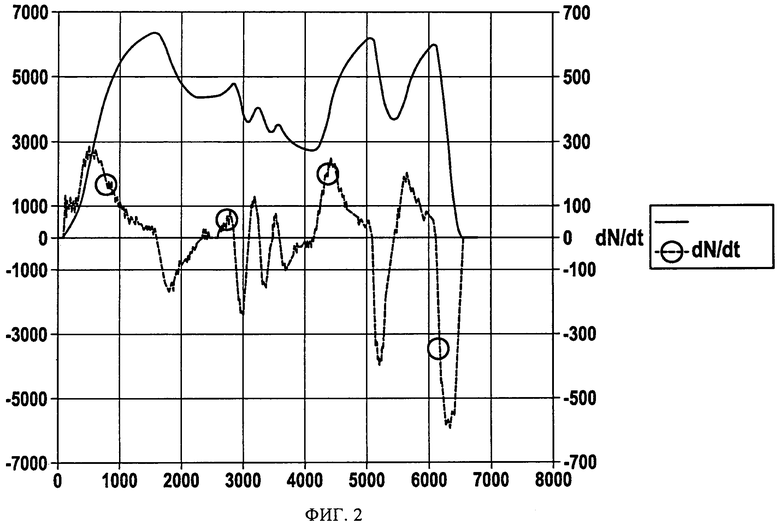
на фиг.2 - график, построенный для частоты вращения и временного изменения частоты вращения из практического примера;
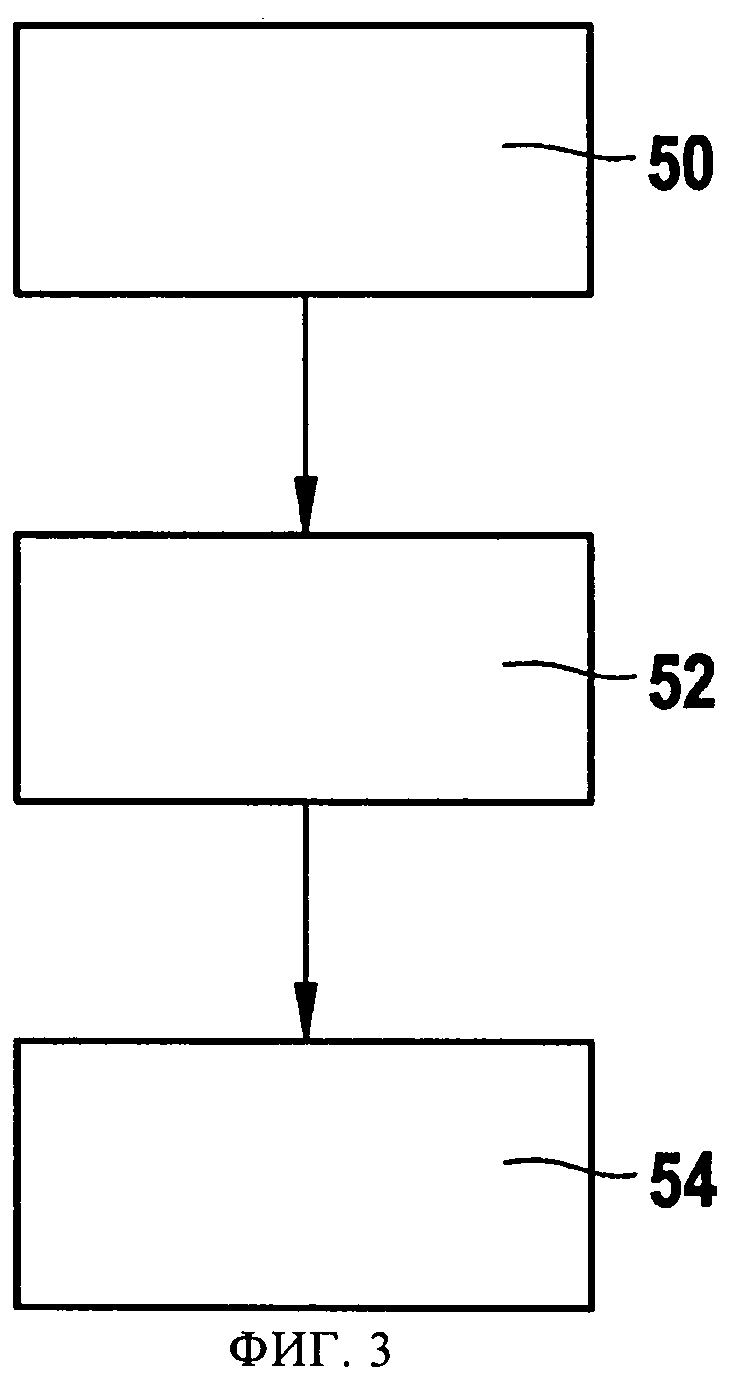
на фиг.3 - блок-схема последовательности выполнения операций согласно варианту выполнения предлагаемого способа.
В дальнейшем описании одинаковые элементы и/или элементы, выполняющие одинаковые функции, могут быть обозначены одинаковыми номерами позиций. Указанные далее по тексту абсолютные значения и указания размеров являются только иллюстративными и не накладывают никаких ограничений на изобретение.
В современных электроприборах или электрических инструментах применяется электронный блок управления, предназначенный для регулирования, повышения мощности, осуществления функций защиты или дополнительных функций. Поэтому этот электронный блок управления в современных электрических инструментах часто оснащают микроконтроллером, с помощью которого реализуются эти функции.
В представленном здесь подходе, с одной стороны, описана защитная функция для электрического инструмента, электрической технологической машины или электроприбора, а с другой стороны, - защитная функция для оператора. Для подлежащего защите прибора, например, такого как электрический инструмент, электрическая технологическая машина или электроприбор, далее по тексту используется сокращенно-обобщающее название "электроприбор". В представленном здесь подходе на основе одного или нескольких параметров работы двигателя, например, таких как ток двигателя, напряжение на якоре или подобных параметров, генерируется сигнал, пропорциональный частоте вращения или нагрузке технологической машины или электроприбора. Этот сигнал, который пропорционален частоте вращения или нагрузке двигателя, подвергается, например, дифференцированию с получением производной. В результате получается, например, скорость изменения частоты вращения, скорость изменения нагрузки или значение, пропорциональное этим величинам. Превышение, например, скоростью изменения частоты вращения или скоростью изменения нагрузки заданного порогового значения в заданном интервале времени влечет за собой определенное изменение состояния электроприбора. В качестве этого определенного изменения состояния может выступать, например, прерывание подачи питания или целенаправленное торможение, или блокировка машины с помощью дополнительных средств.
В результате получается эффективная защитная функция для оператора и электроприбора, когда посредством представленного здесь подхода, например, обнаруживается перекос или заклинивание угловой шлифовальной машины и, например, происходит отключение подачи питания к электроприбору. Такой случай, вызываемый, например, перекосом или заклиниванием электроприбора, в последующем описании обозначается как "обратный удар", как уже выше описано.
В описываемом здесь подходе для обнаружения случая обратного удара используется величина, пропорциональная частоте вращения, получаемая, например, из параметров двигателя, в качестве которых выступают ток двигателя и/или напряжение на якоре, или из их комбинации. В качестве альтернативы для обнаружения случая обратного удара настоящим описанием предусмотрена возможность анализа величины, пропорциональной нагрузке технологической машины. Нагрузку технологической машины можно вывести, например, из такого физического параметра двигателя, как ток двигателя. Ток двигателя можно определять, например, через падение напряжения в шунте и, как возможный вариант, анализировать посредством подходящей аналоговой или цифровой схемы. Кроме того, представленный здесь подход предусматривает возможность обрабатывать и соответственно анализировать величину, пропорциональную нагрузке на машину, например, такую как падение напряжений в обмотке возбуждения электродвигателя, посредством подходящей аналоговой или цифровой схемы. В качестве альтернативы вышеназванному способу частоту вращения также можно получать из частоты коммутации якоря.
С точки зрения функциональности рассматриваемое решение воплощено в устройстве, схематично изображенном на фиг.1. При этом предусмотрено устройство 10, предназначенное для принятия предохранительной меры в электрическом инструменте, который содержит электродвигатель ЕМ с по меньшей мере одной обмоткой возбуждения и обмоткой якоря. При этом электрический инструмент может представлять собой сверлильную машину, угловую шлифовальную машину, механизированный рубанок или подобные устройства, причем важно, что эта технологическая машина приводится в действие с помощью электродвигателя. Устройство имеет сенсорный блок 12, выполненный с возможностью формирования сигнала сенсора, в зависимости от тока 14, проходящего через электродвигатель ЕМ, напряжения 16 на обмотке якоря, напряжения 18 на обмотке возбуждения и/или частоты 20 коммутации в обмотке якоря. Затем эти параметры работы двигателя подаются в виде соответствующих сигналов, изображенных на фиг.1, в сенсорный блок 12 или, соответственно, сенсорный блок 12 выводит из каждой из этих "возможностей съема" 14-20 нужную(-ные) величину(-ы). Также нет необходимости использовать все указанные величины: напротив, анализироваться может только одна из указанных величин, или можно регистрировать, анализировать и соответствующим образом совместно интерпретировать более чем одну величину. После этого сенсорный блок 12 формирует сигнал 21 сенсора, который выдается на основании зарегистрированной(-ных) измеряемой(-мых) величины или величин. Также может формироваться сигнал сенсора, который содержит информацию о нескольких измеряемых величинах (например, в виде сигнала на шине). Этот сигнал 21 сенсора подается в блок 22 обнаружения изменения сигнала сенсора, выполненный с возможностью обнаружения временного изменения сигнала 21 сенсора, и на основе обнаруженного изменения выдачи соответствующего характеризующего изменение сигнала 24. Анализ характера такого изменения во времени может производиться, например, на основании дифференцирования сигнала сенсора. Это особенно эффективно, когда блок 22 обнаружения изменения сигнала сенсора осуществляет дифференцирование на цифровом уровне, так как в этом случае возможно быстрое и надежное вычисление производной сигнала сенсора посредством уже имеющихся процедур цифровой обработки сигналов. Наконец, характеризующий изменение сигнал 24 подается в блок 26 безопасности, выполненный с возможностью принятия предохранительной меры в электрическом инструменте, если значение характеризующего изменение сигнала превышает пороговое значение. Эти предохранительные меры, например, могут осуществляться в виде прерывания подачи питания для электродвигателя и/или электрического или механического торможения электрического инструмента, управление которыми может происходить посредством сигнала 28 управления из блока 26 безопасности. В случае принятия нескольких вышеупомянутых предохранительных мер одновременно или с небольшим сдвигом во времени друг от друга, эффект предохранительной меры значительно повышается. Как возможный вариант, в блоке 26 безопасности также может располагаться блок торможения и/или силовой выключатель, предназначенный для отключения подачи питания, в результате чего выдаваемый вовне сигнал 28 управления уже не требуется.
Преимущества изобретения по сравнению с существующими подходами обусловлены тем, что для обнаружения и оценки случая обратного удара не нужны дополнительные датчики частоты вращения, например зубчатый диск импульсного датчика и дополнительные первичные измерительные преобразователи, например импульсный датчик.
Представленный здесь подход описывает устройство, с помощью которого обнаруживается быстрое изменение частоты вращения или изменение нагрузки, обусловленное, например, заклиниванием или блокировкой электроприбора, что влечет за собой изменение состояния электроприбора, которое направлено на защиту оператора и электроприбора. Преимущества, обеспечиваемые предлагаемым подходом, получаются, прежде всего, в конструкции электроприбора или требующихся для электроприбора датчиков.
Генерирование сигнала, пропорционального частоте вращения, или сигнала, пропорционального нагрузке электроприбора
Обнаружение и анализ сигнала, пропорционального частоте вращения, или сигнала, пропорционального нагрузке технологической машины, подробно описаны в заявке на изобретение "Motorkenngröβen-Detektor und Verfahren zum Bereitstellen eines Drehzahl-Detektionssignals und/oder eines Drehmoment-Detektionssignals", поданной в один день с настоящей заявкой на имя того же заявителя, что и по настоящей заявке и с указанием того же автора изобретения. Содержание указанной заявки полностью включено в настоящее описание путем ссылки.
Генерирование сигнала, пропорционального частоте вращения или нагрузке технологической машины, может осуществляться на основе следующих величин или им подобных:
- тока двигателя и/или напряжения на якоре;
- тока двигателя;
- напряжения, наведенного в обмотке или вспомогательной обмотке;
- результата анализа частоты коммутации.
Генерирование сигнала, пропорционального частоте вращения или нагрузке машины, подробно описано в вышеупомянутой заявке "Motorkenngröβen-Detektor und Verfahren zum Bereitstellen eines Drehzahl-Detektionssignals und/oder eines Drehmoment-Detektionssignals". Отличительной особенностью описанного в этой заявке подхода является то, что требуется минимум одна дополнительная линия, ведущая к якорю двигателя.
Генерирование сигнала, пропорционального нагрузке машины, подробно описано в вышеупомянутой заявке "Motorkenngröβen-Detektor und Verfahren zum Bereitstellen eines Drehzahl-Detektionssignals und/oder eines Drehmoment-Detektionssignals". Для осуществления предложенного в изобретении способа в простейшем случае не требуется никакой дополнительной линии для электродвигателя или, в альтернативном варианте, требуется одна дополнительная линия.
В качестве альтернативы вышеуказанным подходам также можно анализировать напряжение, наводимое в обмотке или вспомогательной обмотке, и исходя из нее генерировать сигнал, пропорциональный частоте вращения или нагрузке технологической машины.
Еще один подход предусматривает возможность генерировать сигнал, несущий данные о частоте вращения, на основе частоты коммутации якоря. Для этого снимается частота коммутации, например, в якоре и, например, дополнительно усиливается посредством подходящей аналоговой или цифровой схемы. Сигнал, пропорциональный частоте вращения, получается, например, путем разложения полученных сигналов на содержащиеся частотные компоненты, например, с помощью преобразования Фурье. За счет, например, проверки правдоподобия или выборочной фильтрации или подобного способа можно сгенерировать сигнал, пропорциональный частоте вращения.
Анализ сигнала, зависимого от частоты вращения или нагрузки
Анализ сигнала, зависимого от частоты вращения или нагрузки, проводимый для обнаружения, например, "обратного удара", можно осуществлять, как в вышеупомянутой заявке "Motorkenngröβen-Detektor und Verfahren zum Bereitstellen eines Drehzahl-Detektionssignals und/oder eines Drehmoment-Detektionssignals" посредством вычисления разности между полуволнами. Если эта разность в дискретный момент времени t превысит пороговое значение X, делается вывод об изменении состояния.
Этот подход очень легко реализуется на практике, однако его можно оптимизировать с помощью дополнительных математических методов. Для этого, как описано выше, генерируют сигнал, пропорциональный частоте вращения или нагрузке электроприбора. Естественно, для анализа согласно этому способу вместо сигнала, пропорционального частоте вращения, также можно использовать частоту вращения. На практике часто встречается наложение помех на пропорциональный частоте вращения сигнал. Помехи могут вызываться, например, искрением под щетками, сетевыми помехами, создаваться другими машинами и т.п.
Помехи, накладывающиеся на пропорциональный частоте вращения сигнал, можно уменьшать или устранять при помощи подходящего фильтра, такого как фильтр присутствия, фильтр отсутствия, полосовой фильтр, фильтр верхних частот, фильтр нижних частот, фильтр Баттерворта, фильтр Чебышева, фильтр Бесселя (так же известный, как фильтр Томсона), эллиптический фильтр (так же известный, как фильтр Каэура), фильтр упорядочивающего типа (например, фильтр минимальных значений, фильтр срединных значений (медианный фильтр), фильтр максимальных значений), фильтр с бесконечной импульсной характеристикой (БИХ-фильтр), фильтр с конечной импульсной характеристикой (КИХ-фильтр).
Представленный здесь подход предусматривает возможность использования для фильтрации всех распространенных линейных, нелинейных и весовых фильтр-функций или подобных математических методов. Анализ облегчают, формируя временное изменение сигнала. Здесь следует более подробно разъяснить анализ сигнала, пропорционального частоте вращения или нагрузке, обратившись к практическому примеру с двуручной угловой шлифовальной машиной.
Изображенные на фиг.2 сигналы записаны для двуручной угловой шлифовальной машины. В этом примере двуручная угловая шлифовальная машина имеет частоту вращения холостого хода около 6500 об/мин. Двуручная угловая шлифовальная машина, соответствующая графику на фиг.2, в процессе работы попадает в ситуацию, где испытывает неравномерное нагружение при обработке заготовки. В конце эксперимента она застревает в заготовке и наступает "обратный удар". На фиг.2 сигнал, пропорциональный частоте вращения, показан сплошной линией. Наложенные на пропорциональный частоте вращения сигнал помехи удалось практически полностью устранить с помощью фильтра усреднения.
Временнóе изменение частоты вращения dN/dt изображено на фиг.2 пунктирной линией с маркерами в виде кружков. Если временнóе изменение частоты вращения превышает, например, значение -500, обнаруживается обратный удар. Результатом этого может быть изменение состояния электроприбора. Возможные изменения состояния электроприбора описаны в части описания с подзаголовком "Примеры возможных изменений состояний", где перечислены действия, применяемые при обнаружении, например, обратного удара в электроприборе.
Пороговое значение для срабатывания функции защиты от обратного удара может варьироваться в зависимости от параметров или параметров машины.
Возможными параметрами или параметрами технологической машины являются
- частота вращения или сигнал, пропорциональный частоте вращения;
- нагрузка машины или сигнал, пропорциональный нагрузке машины;
- сигнал, формируемый с помощью, например, дополнительных сенсоров (датчиков), установленных в электроприборе (этот сигнал может предоставлять сведения о том, как машину держит оператор или как она закреплена);
- параметр, задаваемый органом управления, который имеется в распоряжении оператора;
- параметр, задаваемый вводом оператора.
Если в электроприборе обнаруживается, например, обратный удар, то следствием этого является определенное изменение состояния электроприбора. Это определенное изменение состояния может представлять собой, например, прерывание подачи питания или целенаправленное торможение или блокировку машины с помощью дополнительных средств.
Примеры возможных изменений состояния:
- прерывание питания электроприбора;
- механическое торможение электроприбора;
- электрическое торможение электроприбора;
- электромеханическое торможение электроприбора;
- блокировка электроприбора посредством механического или электрического устройства.
В соответствии с вышеприведенным описанием также можно схематически изобразить предлагаемый подход в виде проиллюстрированной на фиг.3 блок-схемы последовательности операций способа. При этом способ включает в себя стадию формирования 50 сигнала сенсора в зависимости от тока, проходящего через электродвигатель, напряжения на обмотке якоря, напряжения на обмотке возбуждения и/или частоты коммутации в обмотке якоря. Далее способ предусматривает обнаружение 52 временного изменения сигнала сенсора и выдачу соответствующего характеризующего изменение сигнала на основе обнаруженного изменения. Наконец, следует принятие 54 предохранительной меры 28 в электрическом инструменте, если значение характеризующего изменение сигнала превысило пороговое значение или упало ниже порогового значения.
Резюмируя вышесказанное, можно отметить, что настоящее изобретение позволяет хорошо осуществить следующие аспекты:
- анализ сигнала, пропорционального частоте вращения или нагрузке технологической машины, и достижение изменения состояния электроприбора, когда за заданный промежуток времени произошло превышение заданного порогового значения;
- анализ скорости изменения частоты вращения и/или скорости изменения нагрузки и инициирование изменения состояния электроприбора, если указанный параметр в определенный момент времени t превысил определенное пороговое значение X или упал ниже этого порогового значения;
- регистрация сигнала, пропорционального частоте вращения или нагрузке машины без дополнительного сенсора, установленного на машине;
- регистрация параметров работы двигателя, а именно тока двигателя и/или напряжения на якоре, без дополнительной линии, ведущей к двигателю или с помощью минимального количества таких линий;
- простая регистрация параметров работы двигателя, а именно напряжения на якоре и тока якоря, методом дискретизации, описанным в заявке "Motorkenngröβen-Detektor und Verfahren zum Bereitstellen eines Drehzahl-Detektionssignals und/oder eines Drehmoment-Detektionssignals";
- формирование сигнала, пропорционального частоте вращения, на основе частоты коммутации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2015040C1 |
| Электропривод постоянного тока | 1981 |
|
SU1022273A1 |
| УСТРОЙСТВО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2526500C1 |
| Вентильный электродвигатель | 1985 |
|
SU1336186A1 |
| Вентильный электродвигатель | 1981 |
|
SU1007161A1 |
| Способ диагностирования электродвигателя с двумя обмотками последовательного возбуждения | 1981 |
|
SU1000952A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Вентильный электродвигатель | 1985 |
|
SU1354351A1 |
| СИСТЕМА ЭЛЕКТРОСТАРТЕРНОГО ПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2502889C1 |
| Вентильный электродвигатель | 1983 |
|
SU1269236A1 |
Изобретение относится к устройству (10) для принятия предохранительной меры в электрическом инструменте, содержащем электродвигатель (ЕМ) с по меньшей мере одной обмоткой возбуждения и обмоткой якоря. Устройство (10) содержит сенсорный блок (12), выполненный с возможностью формирования сигнала (21) сенсора, в зависимости от тока (14), проходящего через электродвигатель (ЕМ), напряжения (16) на обмотке якоря, напряжения (18) на обмотке возбуждения и/или частоты (20) коммутации в обмотке якоря; блок (22) обнаружения изменения сигнала сенсора, выполненный с возможностью обнаружения временного изменения сигнала (21) сенсора и выдачи на основании обнаруженного изменения соответствующего характеризующего изменение сигнала (24); и блок (26) безопасности, выполненный с возможностью принятия предохранительной меры (28) в электрическом инструменте в зависимости от значения характеризующего изменение сигнала (24), если значение указанного характеризующего изменение сигнала (24) превысило соответствующее пороговое значение или упало ниже порогового значения. Технический результат - повышение безопасности. 2 с. и 6 з.п. ф-лы, 3 ил.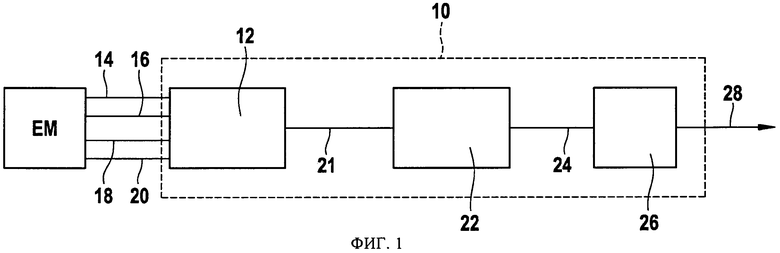
1. Устройство (10) для принятия предохранительной меры с целью защиты оператора от обратного удара при блокировке или заклинивании рабочего инструмента электрического инструмента, содержащего электродвигатель (ЕМ) с по меньшей мере одной обмоткой возбуждения и обмоткой якоря, содержащее:
- сенсорный блок (12), выполненный с возможностью формирования сигнала (21) сенсора в зависимости от тока (14), проходящего через электродвигатель (ЕМ), напряжения (16) на обмотке якоря, напряжения (18) на обмотке возбуждения и/или частоты (20) коммутации в обмотке якоря;
- блок (22) обнаружения изменения сигнала сенсора, выполненный с возможностью обнаружения временного изменения сигнала (21) сенсора и выдачи на основании обнаруженного изменения соответствующего характеризующего изменение сигнала (24);
- блок (26) безопасности, выполненный с возможностью обнаружения блокировки или заклинивания и принятия предохранительной меры (28) в электрическом инструменте в зависимости от значения характеризующего изменение сигнала (24), прежде всего, если значение указанного характеризующего изменение сигнала (24) превысило пороговое значение или упало ниже порогового значения, таким образом, чтобы прервать подачу питания в электрическом инструменте, запустить механическое торможение электрического инструмента и/или заблокировать электрический инструмент с помощью механического или электрического устройства.
2. Устройство по п.1, отличающееся тем, что блок (22) обнаружения изменения сигнала сенсора и/или блок (26) безопасности выполнены с возможностью осуществления цифровой обработки сигналов.
3. Устройство по п.1, отличающееся тем, что блок (22) обнаружения изменения сигнала сенсора выполнен с возможностью осуществления фильтрации сигнала (21) сенсора перед обнаружением временного изменения указанного сигнала.
4. Устройство по п.3, отличающееся тем, что блок (22) обнаружения изменения сигнала сенсора выполнен с возможностью осуществления фильтрации сигнала (21) сенсора на основе линейной, нелинейной и/или весовой фильтр-функции или проведения в его отношении преобразования Фурье.
5. Устройство по одному из пп.1-4, отличающееся тем, что:
- сенсорный блок (12) выполнен с возможностью формирования второго сигнала сенсора, отличного от сигнала (21) сенсора, в зависимости от тока (14), проходящего через электродвигатель (ЕМ), напряжения (16) на обмотке якоря, напряжения (18) на обмотке возбуждения и/или частоты (20) коммутации в обмотке якоря;
- блок (22) обнаружения изменения сигнала сенсора выполнен с возможностью обнаружения временного изменения второго сигнала сенсора и выдачи, на основании обнаруженного изменения, соответствующего второго характеризующего изменение сигнала;
- блок (26) безопасности выполнен с возможностью принятия предохранительной меры в электрическом инструменте в случае, если одновременно значение характеризующего изменение сигнала (24) превысило соответствующее пороговое значение или упало ниже порогового значения и значение второго характеризующего изменение сигнала превысило второе пороговое значение или упало ниже второго порогового значения.
6. Устройство по п.1, отличающееся тем, что блок (26) безопасности выполнен с возможностью использования при принятии предохранительной меры порогового значения, зависящего от сигнала (21) сенсора, или устанавливаемого извне порогового значения.
7. Устройство по п.1, отличающееся тем, что сенсорный блок (12) выполнен с возможностью регистрации положения электрического инструмента и/или состояния зажатия рабочего инструмента, закрепленного в электрическом инструменте, при этом блок (26) безопасности выполнен с возможностью использования при принятии предохранительной меры порогового значения, зависящего от зарегистрированного положения электрического инструмента и/или состояния зажатия рабочего инструмента, закрепленного в электрическом инструменте.
8. Способ принятия предохранительной меры с целью защиты оператора от обратного удара при блокировке или заклинивании рабочего инструмента электрического инструмента, содержащего электродвигатель (ЕМ) с по меньшей мере одной обмоткой возбуждения и обмоткой якоря, включающий:
- формирование (50) сигнала (21) сенсора в зависимости от тока (14), проходящего через электродвигатель (ЕМ), напряжения (16) на обмотке якоря, напряжения (18) на обмотке возбуждения и/или частоты (20) коммутации в обмотке якоря;
- обнаружение (52) временного изменения сигнала (21) сенсора и выдачу соответствующего характеризующего изменение сигнала (24) на основе обнаруженного изменения; и
- принятие (54) при обнаружении блокировки или заклинивания предохранительной меры (28) в электрическом инструменте, если значение характеризующего изменение сигнала (24) превысило пороговое значение или упало ниже порогового значения, таким образом, чтобы прервать подачу питания в электрическом инструменте, запустить механическое торможение электрического инструмента и/или заблокировать электрический инструмент с помощью механического или электрического устройства.
| US 6479958 B1, 12.11.2002 | |||
| Устройство для асинхронного пуска и ресинхронизации синхронной машины | 1988 |
|
SU1594670A1 |
| ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД НЕГОДЫ | 1989 |
|
RU2020715C1 |

