1
Изобретение относится к электрическим машинам и предназначено для использования в процессе эксплуатации и ремонта при диагностировании электродвигателей, в частности для безразборного определения механических дефектов скользящего контакта.
Известны способы диагностирования электрических машин постоянного тока, основанные на измерении различных па-ю раметров, характеризующих процесс коммутации, и требующие при своей реализации частичной разборки машины и установки дополнительных щеток 1j.
Наиболее близким к предлагаемому is по технической сущности и достигаемому результату является способ, основанный на косвенной оценке переходного падения напряжения в скользящем контакте при стабилизированной зо частоте вращения и постоянном токе| 2.
К недостаткам известного способа относится ограниченная область применения, обусловленная тем, что в процессе диагностирования наряду со стабил1;зацией частоты вращения необходимо обеспечивать постоянство тока якоря.
В оборудовании различных технических объектов, например самолетов, широкое распространение получили реверсивные электродвигатели постоянного тока последовательного возбуждения , имеющие на каждое направление отдельную обмотку возбуждения.
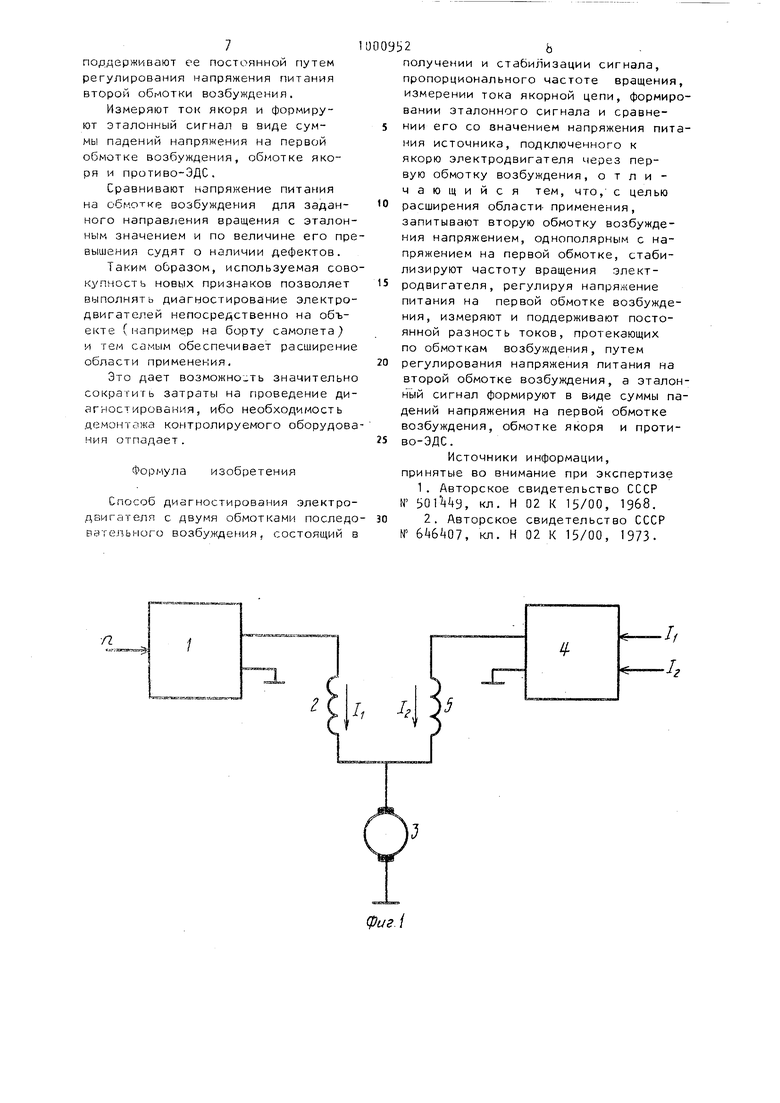
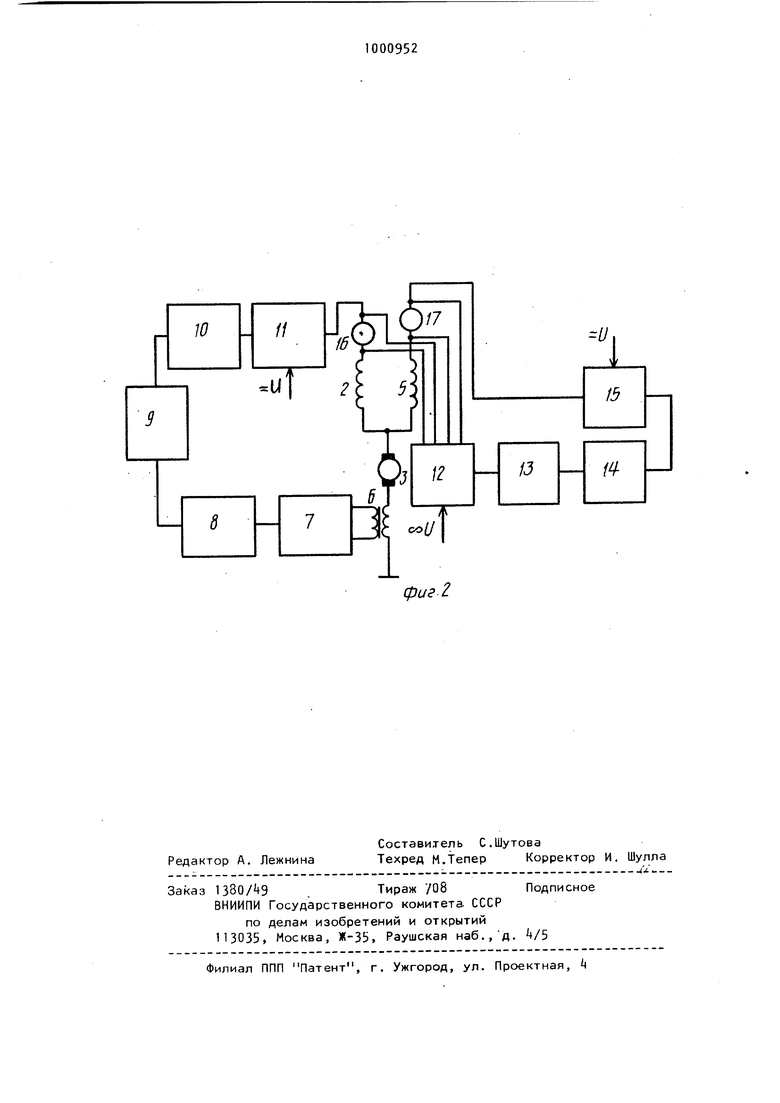
Диагностирование таких электродвигателей известным способом возможно лишь на испытательном стенде с регулируемым нагрузочным моментом, так как необходима одновременная стабилизация частоты вращения и тока. В реальных условиях на борту само.пета момент нагрузки на валу электродвигателя может случайным эбразом изменяться на значительную величину. Например,у электродвигателей авиационных механизмов привода заслонок (кранов) изменение момента нагрузки (за цикл перекладки из одного крайнего положения в друг гое) достигает 20-30 от среднего значения. Это указывает на невозможность одновременной стабилизации. частоты вращения и тока в процессе диагностирования и тем самым на невозможность использования известного способа непосредственно на борту самолета. Что же касается корректировки значения эталонного сигнала в зависимости от величины тока, то, поскольку магнитный поток электродвигателя при изменении момента так ,же изменяется, величина поправки будет нелинейно зависеть от вели.чины тока. Это указывает на сложп) ность формирования эталонного сиг( нала (уставки) питающего напряжения и практическую нереализуемость известного способа. Цель из9бретения - расширение области применения. Указанная цель достигается тем, что запитывают вторую обмотку возбуждения напряжением, однополярным с напряжением на первой обмотке, стабилизируют частоту вращения электродвигателя, регулируя напряжение питания на первой обмотке воз буждения, измеряют и поддерживают постоянной разность токов, протекающих по обмоткам возбуждения, путем регулирования напряжения питани на второй обмотке возбуждения, а эталонный сигнал формируют в виде с мы падении напряжения на первой обмотке возбуждения, обмотке якоря и противо-ЭДС. Сущность предлагаемого способа состоит в том, что магнитный поток электродвигателя в процессе диагнос тирования поддерживают постоянным, тем самым обеспечивается возг южност формирования эталонного сигнала (уставки) как линейной функции от токов обмотки и якоря электродвигат ля . На фиг. 1 представлена схема, по ясняющая сущность предлагаемого спо соба; на фиг. 2- схема устройства, реализующего способ. С помощью блока 1 осуществляется стабилизация частоты вращения путем изменения напряжения питания на зажимах одной обмотки 2 возбуждения (например, на левое направление вра щения) и якоря 3. Стабилизация выпо няется по сигналу частоты вращения п, в качестве которого можно использовать частоту пульсаций тока (например коллекторных) в цепи электродвигателя. Блок k также представляет регулируемый источник напряжения, причем в качестве управляющего сигнала используется величина, пропорциональная разности токов обмоток 2 и 5 возбуждения на левое и правое Зз. направления вращения. При изменении нагрузочного момента на валу электродвигателя и соответствующем изменении 1 напряжение на зажимах обмотки 5 возбуждения меняется таким образом, чтобы рй.:ность у-1 2 оставалась постоянной и тем самым обеспечивалась неизменность магнитного потока электродвигателя. Как известно из теории электрических машин, при такой схеме включения наппяжение питания U на обмотке 2 возбуждения -(l, + i)R,,-b Е, где 1 , I - токи соответствующих обмоток возбуждения; R , Rfl сопротивления обмоток возбуждения и якоря; Е - противо-ЭДС. Так как магнитный поток электродвигателя поддерживается постоянным, а частога вращения стабилизируется на определенном уровне (например номинальном), то для заданного типа электродвигателя значение Е постоянно. Для любых возможных значений I и Ij на основании выражения (1) вручную или с помощью простейшего множит ел ьно-суммирующего вычислительного устройства может быть сформировано эталонное значение напряжения питания. При появлении механических дефектов скользящего контакта падение напряжения на нем, неявно учитываемое и в. выражении (1), существенно возрастает, что обнаружится в увеличении фактического напряжения питания на первой обмотке возбуждения относительно эталонного. Устройство для реализации предлагаемого способа (фиг. 2) включает систему стабилизации частоты вращения, содержащую датчик пульсаций в виде трансформатора 6, фильтр 7, усилитель-ограничитель 8, чувствительный элемент 9, схему 10 сравнения и регулятор П напряжения, и систему 51 стабилизрции магнитного потока элек родвигателя, состоящую из магнитного усилителя 12, выпрямителя 13, схемы I сравнения, регулятора 15 .напряжения и двух ампер метров 16 и Система стабилизации частоты вращения электродвигателя работает следующим образом. Пульсации тока, содержащие коллекторную составляющую, с вторичной обмотки трансформатора 6 . поступают на вход фильтра 7, где указанная составляющая выделяется, В усилителе-ограничителе производится нормализация коллекторных пульсаций (частота которых пропорциональна частоте вращения электродвигателя) по амплитуде. С выхода чувствительного элемента 9, в качестве которого используется US-контур, соединенный с преобразователем переменного напряжения в постоянное, величина которого завис от частоты вращения, подается на сх му 10 сравнения, где формируется разностный сигнал, воздействующий на исполнительный регулирующий элемент регулятора 11 напряжения. При этом внутреннее сопротивление регулирующего элемента (например тран-. зистора) меняется, вследствие чего возникает изменение выходного напря жения, компенсирующее колебания час тоты вращения.. В системе стабилизации магнитног потока управляющий сигнал формирует ся с помощью магнитного усилителя 1 встречно включенные обмотки управле ния которого соединены с зажимами шунтов амперметров 16 и 17- Выходно сигнал магнитного усилителя, пропор циональный разности токов, протекаю щих по обмоткам возбуждения Z и 3, выпрямляется в блоке 13 и сравнива ется с опорным в схеме 1Д сравнения При отклонении разности токов от за данного значения выходной сигнал схемы сравнения аналогично воздействует на регулятор 15, который изменяет напряжение на зажимах обмотки 5 и тем самым компенсирует возникшее отклонение. Регуляторы 11 и 15 и магнитный усилитель 12 за питываются соответствующими.постоян ными и переменным напряжениями. Учитывая, что магнитные потоки, создаваемые обмотками рассматриваемых электродвигателей, направлены встречно, то при равенстве на них 2 напряжений одной полярности магнит-ный поток будет равен 0. Однако такая ситуация невозможна при исправной работе стабилизаторов частоты вра щения и тока, что можно пояснить следующим образом. При включении, стабилизатора частоты вращения последний за счет регулирования напряжения на первой обмотке возбуждения обеспечивает постоянную частоту вращения электродвигателя, например номинальное значение, при изменениях момента нагрузки на его валу. Включение стабилизатора магнитного потока происходит при превышении тока первой обмотки минимально возможного для заданной (номинальной ) частоты вращения значения путем подачи на вторую обмотку однополярного с первой обмоткой напряжения, величина которого достаточна для поддержания разности токов первой и второй обмоток на выбранном минимальном уровне (не равном 0) , чем и обеспечивается постоянство потока. Стабилизатор магнитного потока поддерживает лишь постоянство разности токов, а -не равенство токов, причем ток первой обмотки для заданного направления вращения всегда больше тока второй обмотки. Изменение частоты вращения при изменении напряжения на второй обмотке может произойти только при отказе стабилизатора частоты враще- ния, а при исправной его работе любые возмущения, в том числе и увеличение суммарного якорного тока fвызванные изменением напряжения на второй обмотке , будут скомпенсированы соответствующим изменением (увеличением напряжения на первой обмотке. Поскольку быстродействие электронных стабилизаторов частоты вращения и магнитного потока велико, .то при совместной работе стабилизаторов колебаний частоты вращения и разности потоков не произойдет. Способ осуществляют в следующей последовательности. Запитывают обе обмотки возбуждения однополярными напряжениями. Регулируя напряжение питания первой обмотки возбуждения, стабили-зируют частоту вращения электродвигателя для заданного направления вращения. Измеряют токи, протекающие по обмоткам, находят их разность и
71
поддерживают ее постоянной путем регулирования напряжения питания второй обмотки возбуждения.
Измеряют ток якоря и формируют эталонный сигнал в виде суммы падений напряжения на первой обмотке возбуждения, обмотке якоря и противо-ЭДС.
Сравнивают напряжение питания на обмотке возбуждения для заданного направ1|ения вращения с эталонным значением и по величине его превышения судят о наличии дефектов.
Таким образом, используемая совокупность новых признаков позволяет выполнять диагностирование электродвигателей непосредственно на объекте (например на борту самолета) и тем самым обеспечивает расширение области применения.
Это дает возможность значительно сокрагить затраты на проведение диагностирования, ибо необходимость демонтажа контролируемого оборудова ния отпадает .
Формула изобретения
Способ диагностирования электродвигателя с двумя обмотками последо вэтелы-юго возбу.ждения, состоящий в
OOyijZь
получении и стабилизации сигнала, пропорционального частоте вращения, измерении тока якорной цепи, формировании эталонного сигнала и сравне5 НИИ его со значением напряжения питания источника, подключенного к якорю электродвигателя через первую обмотку возбуждения, отличающийся тем, что, с целью
О расширения области- применения,
запитывают вторую обмотку возбуждения напряжением, однополярным с напряжением на первой обмотке, стабилизируют частоту вращения элект15 родвигателя, регулируя напряжение питания на первой обмотке возбуждения, измеряют и поддерживают постоянной разность токов, протекающих по обмоткам возбуждения, путем
20 регулирования напряжения питания на второй обмотке возбуждения, а эталонный сигнал формируют в виде суммы падений напряжения на первой обмотке возбуждения, обмотке якоря и проти25 во-ЭДС.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР f SOAifS, кл, Н 02 К 15/00, 1968. 30 2. Авторское свидетельство СССР If , кл. Н 02 К 15/00, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ диагностирования электродвигателя с двумя обмотками последовательного возбуждения | 1983 |
|
SU1111110A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Способ контроля скользящего контакта электродвигателя постоянного тока | 1980 |
|
SU903778A1 |
| Стабилизированный радиально-аксиальный бесконтактный электрический генератор | 2016 |
|
RU2643514C1 |
| Способ контроля скользящего контакта электромашинного преобразователя с электродвигателем постоянного тока | 1982 |
|
SU1073714A1 |
| Электропривод постоянного тока | 1987 |
|
SU1515312A1 |
| ДВУХДВИГАТЕЛЬНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2006 |
|
RU2332316C1 |
| Устройство для регулирования частоты вращения электродвигателя постоянного тока | 1989 |
|
SU1686679A1 |
| Способ контроля многополюсных машин постоянного тока с волновой обмоткой якоря | 1980 |
|
SU918900A1 |
| СТАБИЛИЗИРОВАННЫЙ АКСИАЛЬНЫЙ ГЕНЕРАТОР ПОСТОЯННОГО ТОКА | 2011 |
|
RU2470446C1 |
фиг I
