Изобретение относится к медицинской технике и может быть использовано в робототехнической системе при выполнении различных медицинских процедур.
Известно устройство зажима (см. патент RU №2371305), которое включает обойму, выполненную с возможностью поступательного перемещения, упругие элементы, выполненные в виде упругой ленты с перегибами и прикрепленные к обойме, приводной элемент со штоком и несущий стержень. Захват снабжен жесткой планкой, имеющий в средней части шарнир, при этом упругие элементы прикреплены к обойме одним концом, а другим, в виде внутренних перегибов упругих моментов, - к жесткой планке. При этом несущий стержень скреплен с шарниром жесткой планки (прототип).
Недостатком известного устройства зажима является ограничение его функциональных возможностей, поскольку он предназначен для решения конкретной задачи и не может быть применен в робототехнической системе с компьютерным управлением для ориентированного приема хирургических инструментов и диагностических устройств с последующим возвратно-поступательным двойным разворотом для проведения как хирургических, так и диагностики процедур.
Техническим результатом предложенного изобретения является усовершенствование известного устройства захвата для ориентированного приема и двойного возвратно-поступательного разворота хирургических инструментов и диагностических устройств, функционально связанных с операционным столом с компьютерным управлением.
Указанный технический результат достигается следующим устройством.
Устройство выдвижного элемента зажима многофункциональной дагностико-хиругической робототехнической системы с возможностью информационно-компьютерного управления, включающее устройство зажима операционных элементов с возможностью двух разворотов и соединенного посредством первого привода, выполняющего функцию шарнира, с устройством промежуточного разворота, который включает второй привод, выполняющий также функцию шарнира, соединен с дополнительным устройством осевого разворота зажима, при этом введен линейный привод, корпус которого закреплен в сферическом корпусе робототехнической системы, а на выдвижной части линейного привода посредством двух планок закреплен привод с редуктором, в котором внешняя часть редуктора закреплена с одной планкой, а статорная часть привода с редуктором посредством осевого стержня соединена с возможностью вращения со второй планкой, при этом корпус статора соединен с дополнительным устройством осевого разворота зажима.
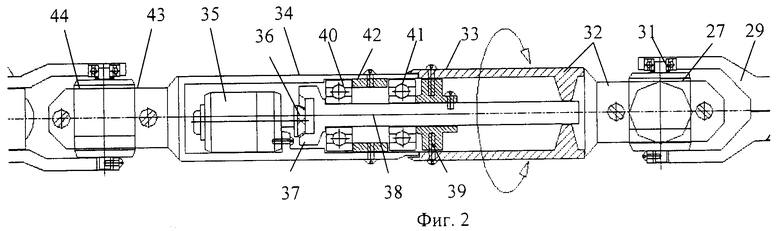
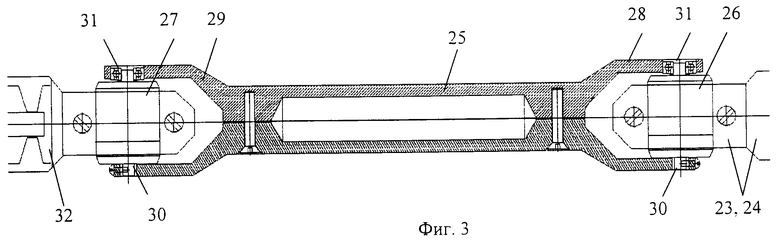
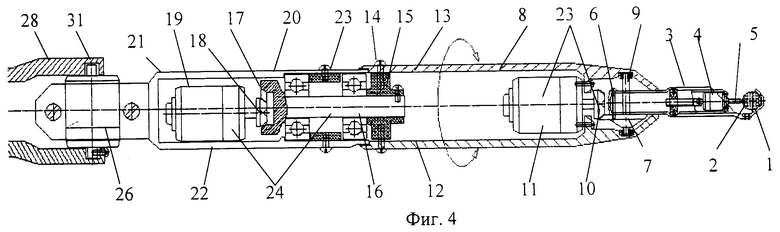
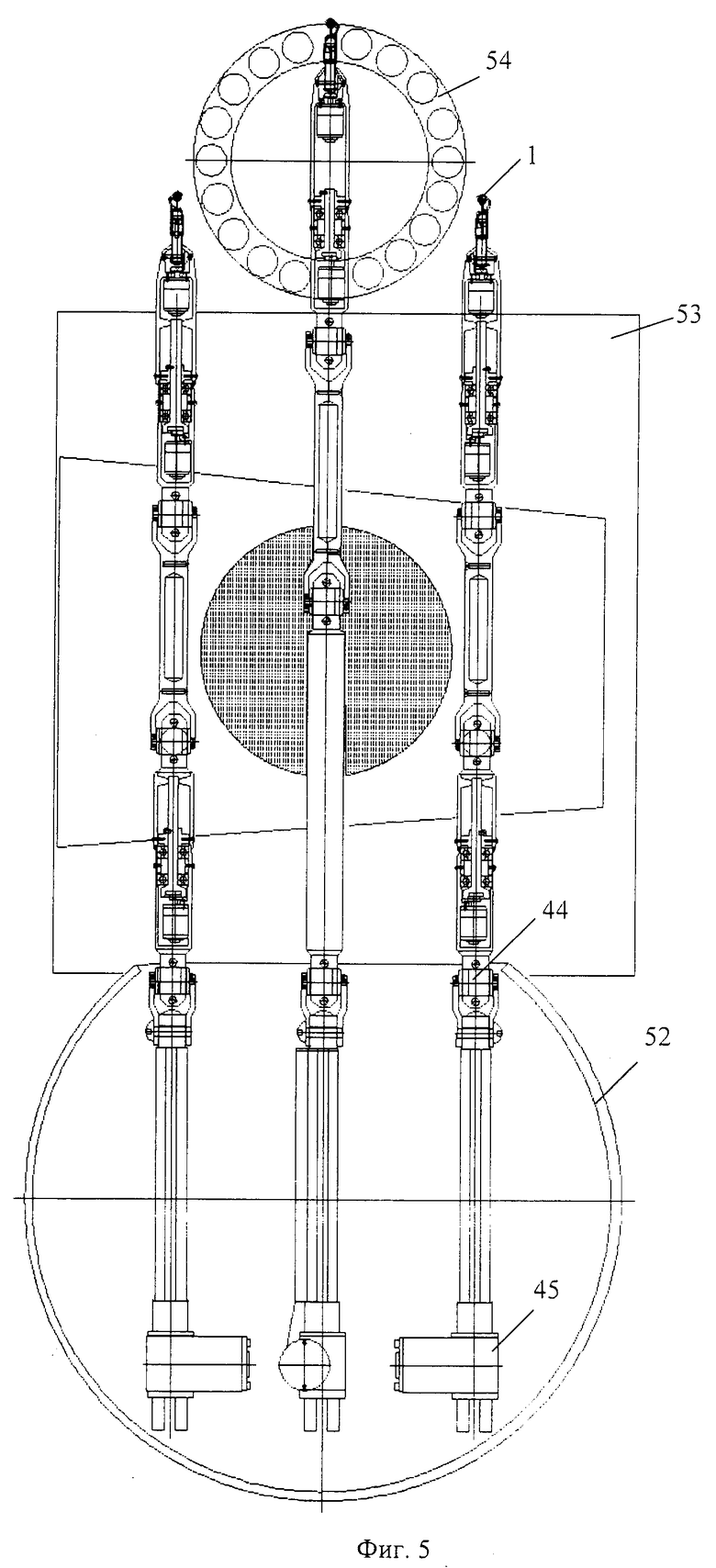
На фиг.1 изображено устройство выдвижною элемент зажима многофункциональной дагностико-хиругической робототехнической системы с возможностью информационно-компьютерного управления. На фиг.2 изображено устройство первого осевого разворота зажима операционных элементов. На фиг.3 изображено устройство промежуточного разворота зажима хирургических элементов. На фиг.4 изображено устройство второго разворота зажима. На фиг.5 изображена робототехническая система операционного стола с возможностью информационно-компьютерного управления.
Устройство выдвижного элемента зажима многофункциональной дагностико-хиругической робототехнической системы с возможностью информационно-компьютерного управления содержит (фиг.4) устройство зажима 1 медицинского инструмента 2, реализованного с возможностью возвратно-поступательною смещения в корпусе зажима 3 привода 4 с фиксирующим стержнем 5. При этом корпус 3 с зажимом 1 хирургического элемента 2 с противоположной стороны 6 расположения зажима 1 зафиксирован на конической шестеренке 7 для возвратно-поступательного смещения в осевой плоскости первой части корпуса смещения 8 зажима 1 и шарнирно соединен с верхней частью осевого стержня 9 конической шестеренки 7, которая функционально связана с конической шестеренкой 10 привода 11 возвратно-поступательного разворота корпуса 3 с зажимом 1 хирургического элемента 2. При этом привод 11 возвратно-поступательного разворота корпуса 3 с зажимом 1 зафиксирован на первой 12 и второй 13 половине первой части корпуса 8 смещения зажима 1, которые совместно образуют корпус цилиндрической формы и с противоположной стороны 14 расположения зажима 1 зафиксированы между собой посредством ограничителя 15, который зафиксирован на одном конце осевого стержневого элемента 16 первого осевого разворота зажима 1. При этом второй конец осевого стержневого элемента 16 выполнен с конической шестеренкой 17, которая функционально связана с конической шестеренкой 18 привода 19 первого осевого разворота, который зафиксирован внутри второй части корпуса 20, который также выполнен в виде двух половин 21 и 22, соединенных посредством шайбы 23. В результате описанная конструкция представляет собой устройство разворота зажима 1 операционных элементов 2 и устройство первого осевого разворота операционных элементов 2 и является устройством с возможностью двух разворотов. При этом устройство зажима операционных элементов (фиг.4) с возможностью двух разворотов включает также дополнительный корпус 25 (фиг.3) устройства промежуточного разворота с первым 26 и вторым 27 приводом с редуктором, которые позиционно расположены на одном 28 и другом 29 его конце, при этом внешняя редукторная часть первого 26 и второго 27 привода соединена с первой половиной конечной части 30 корпуса 25 промежуточного разворота зажима, а противоположная статорная часть 31 приводов шарнирно соединена со второй половиной конечной части 28 корпуса промежуточного разворота 25, при этом на корпусе статора первого привода 26 закреплена с возможностью совместного разворота крайняя часть корпуса 23, 24 устройства зажима операционных элементов с возможностью двойного разворота зажима, а на корпусе статора второго привода 27 закреплена крайняя часть 32 дополнительного устройства второго осевого разворота зажима. При этом устройство дополнительного осевого разворота захвата (фиг.2), корпус которого выполнен из двух частей 33 и 34 цилиндрической формы, одна 34 из которых включает зафиксированный внутри привод 35 с конической шестеренкой 36, функционально связанной с конической шестеренкой 37 осевого стержневого элемента 38 разворота второй части корпуса 33, внутри которого он зафиксирован в центральной части ограничителя 39, а верхняя часть ограничителя 39 зафиксирована внутри второй части 33 корпуса разворота. При этом на осевом стержневом элементе 38 между его конической шестеренкой 37 и ограничителем 39 расположены два разнесенных подшипника 40 и 41 с шайбой 42 между ними, которая зафиксирована с первой и второй частью корпуса 34 осевого дополнительного разворота устройства зажима 1. При этом первая 33 и вторая 34 часть корпуса устройства дополнительного осевого разворота зажима противоположными сторонами 43 и 32 зафиксированы на статорной части привода 44 устройства разворота выдвижной части и на статорной части второго привода 27 устройства промежуточного разворота соответственно. При этом введен линейный привод 45 (фиг.1), корпус 46 которого закреплен в сферическом корпусе робототехнической системы, а на выдвижной части 47 линейного привода 45 посредством двух планок 48 и 49 закреплен привод с редуктором 44, в котором внешняя часть 50 редуктора закреплена с планкой 49, а статорная часть привода 44 с редуктором посредством осевого стержня 51 соединена с возможностью вращения со второй планкой 48, при этом корпус статора привода 44 соединен с устройством дополнительного второго осевого разворота зажима. На фиг.5 изображен сферический корпус 52 робототехнической системы, хирургический стол 53 и инструментальный стол 54.
Устройство выдвижного элемента зажима многофункциональной дагностико-хиругической робототехнической системы с возможностью информационно-компьютерного управления в данном исполнении может быть использовано для ориентированного приема (фиг.5) хирургических инструментов и диагностических устройств с инструментального стола 54, функционально связанного с операционным столом 53, а реализуют эту процедуру (фиг.4) посредством устройства зажима 1, который включает фиксирующий стержень 5, функционально связанный с приводом 4 с возможностью возвратно-поступательного смещения внутри корпуса 3 зажима 1. При этом корпус 3 зажима 1 в позиции 6 зафиксирован с конической шестеренкой 7 и шарнирно связан с верхней частью осевого стержня 9 конической шестеренки 7 и осуществляет совместный разворот посредством конической шестеренки 10 и привода 11, который зафиксирован внутри корпуса смещения 8 зажима, состоящий из первой 12 и второй 13 его части. С другой стороны корпуса 8 смещения зажима первая 12 и вторая 13 его части зафиксированы между собой посредством ограничителя 15, который расположен на осевом стержневом элементе 16 разворота корпуса 8 для разворота зажима 1 после приема инструмента 2. При этом корпус 20 осевого разворота зажима выполнен из двух частей 21 и 22 цилиндрической формы, одна часть 22 включает зафиксированный внутри привод 19 с конической шестеренкой 18, функционально связанной с конической шестеренкой 17 осевого стержневого элемента 16 разворота второй части корпуса 8, внутри которого он зафиксирован в центральной части ограничителя 15, а верхняя часть ограничителя 15 зафиксирована внутри второй части корпуса 8 разворота. При этом на осевом стержневом элементе 16 между его конической шестеренкой 17 и ограничителем 15 расположены два разнесенных подшипника с шайбой 23 между ними, которая зафиксирована с первой 21 и второй частью 22 корпуса осевого разворота. При этом функциональное назначение устройства промежуточного разворота (фиг.3) предназначено для расширения функциональных возможностей перемещения захвата 1 как над операционным столом 53 (фиг.5), так и для перемещения захвата в зону расположения инструментального стола 54. И эту процедуру выполняют первый 26 и второй 27 приводы. И если второй привод 27 выполняет функцию возвратно-поступательного разворота дополнительного корпуса 25 промежуточного разворота зажима 1 на более чем 180°, то первый привод 26 выполняет функцию возвратно-поступательного разворота устройства 23, 24 (фиг.4) возвратно-поступательного двойного разворота зажима 1. При этом следует отметить, что разворот осуществляет статорная часть привода 26 и 27, а устройство второго осевого разворота зажима (фиг.2) позволяет расширить функциональные возможности позиционного положения как в корпусе робототехнической системы 52 (фиг.5), так и зоне операции над хирургическим столом 53 и инструментальным столом 54. При этом посредством линейного привода 45 (фиг.1, 5) осуществляют дополнительное выдвижение зажима 1, а посредством привода 44 помимо корректировки позиционного положения зажима выполняют ввод предварительно собранных устройств зажима 1 во внутрь сферическою корпуса 52 робототехнической системы.
Использование предложенного технического решения позволяет расширить функциональные возможности устройства захвата хирургических инструментов и диагностических устройств в дагностико-хиругический системах операционного стола с возможностью информационно-компьютерного управления.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Устройство выдвижного элемента зажима многофункциональной диагностико-хирургической робототехнической системы с возможностью информационно-компьютерного управления, включающее устройство зажима операционных элементов с возможностью двух разворотов и соединенное посредством первого привода выполняющего функцию шарнира с устройством промежуточного разворота, которое включает второй привод, выполняющий также функцию шарнира, соединенного с дополнительным устройством осевого разворота зажима. При этом введен линейный привод, корпус которого закреплен в сферическом корпусе робототехнической системы, а на выдвижной части линейного привода посредством двух планок закреплен привод с редуктором, в котором внешняя часть редуктора закреплена с одной планкой, а статорная часть привода с редуктором посредством осевого стержня соединена с возможностью вращения со второй планкой. При этом корпус статора соединен с дополнительным устройством осевого разворота зажима. Устройство позволяет осуществлять ориентированный прием хирургического инструмента и диагностических устройств с инструментального стола. 5 ил.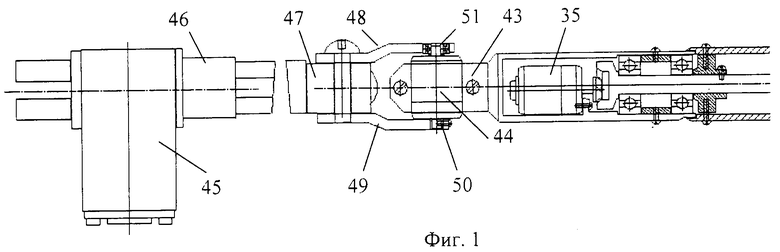
Устройство выдвижного элемента зажима многофункциональной диагностико-хирургической робототехнической системы с возможностью информационно-компьютерного управления, включающее устройство зажима операционных элементов с возможностью двух разворотов и соединенное посредством первого привода выполняющего функцию шарнира с устройством промежуточного разворота, которое включает второй привод, выполняющий также функцию шарнира, соединенного с дополнительным устройством осевого разворота зажима, отличающееся тем, что введен линейный привод, корпус которого закреплен в сферическом корпусе робототехнической системы, а на выдвижной части линейного привода посредством двух планок закреплен привод с редуктором, в котором внешняя часть редуктора закреплена с одной планкой, а статорная часть привода с редуктором посредством осевого стержня соединена с возможностью вращения со второй планкой, при этом корпус статора соединен с дополнительным устройством осевого разворота зажима.
| CN 101396298 A, 01.04.2009 | |||
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ И ХРАНЕНИЯ РАДИОАКТИВНЫХ ОТХОДОВ | 2006 |
|
RU2312414C1 |
| Захват манипулятора | 1980 |
|
SU973354A1 |
| SU 1292661 A3, 23.02.1987. | |||

