Изобретение относится к медицинской технике и может быть использовано в робототехнической системе при выполнении различных медицинских процедур.
Известно устройство зажима (см. патент RU №2371305), которое включает обойму, выполненную с возможностью поступательного перемещения, упругие элементы, выполненные в виде упругой ленты с перегибами и прикрепленные к обойме, приводной элемент со штоком и несущий стержень. Захват снабжен жесткой планкой, имеющей в средней части шарнир, при этом упругие элементы прикреплены к обойме одним концом, а другим, в виде внутренних перегибов упругих элементов, - к жесткой планке. При этом несущий стержень скреплен с шарниром жесткой планки (прототип).
Недостатком известного устройства зажима является ограничение его функциональных возможностей, поскольку он предназначен для решения конкретной задачи и не может быть применен в робототехнической системе с компьютерным управлением для ориентированного приема хирургических инструментов и диагностических устройств с последующим возвратно-поступательным двойным разворотом для проведения как хирургических, так и диагностики процедур.
Техническим результатом предложенного изобретения является усовершенствование известного устройства захвата для ориентированного приема и двойного возвратно-поступательного разворота хирургических инструментов и диагностических устройств, функционально связанных с операционным столом с компьютерным управлением.
Указанный технический результат достигается следующим устройством.
Устройство осевого возвратно-поступательного разворота исполнительного элемента приема и удержания хирургических элементов в многофункциональной дагностико-хиругической робототехнической системе для операционного стола с возможностью информационно-компьютерного управления, включающее корпус с зажимом хирургических элементов посредством стержня, функционально связанного с приводом возвратно-поступательного смещения, и корпус разворота зажима, при этом корпус разворота зажима выполнен из двух частей цилиндрической формы, одна из который включает зафиксированный внутри привод с конической шестеренкой, функционально связанной с конической шестеренкой осевого стержневого элемента разворота второй части корпуса, внутри которого он зафиксирован в центральной части ограничителя, а верхняя часть ограничителя зафиксирована внутри второй части корпуса разворота, при этом на осевом стержневом элементе между его конической шестеренкой и ограничителем расположены два разнесенных подшипника с шайбой между ними, которая зафиксирована с первой частью корпуса осевого разворота.
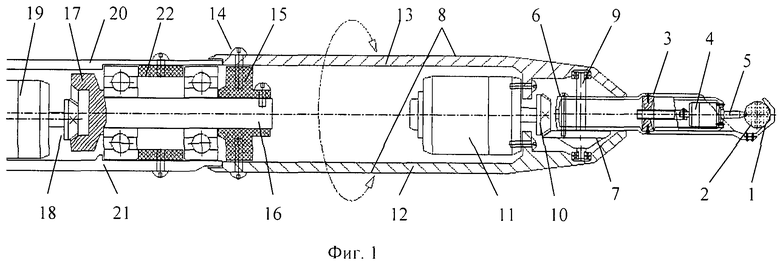
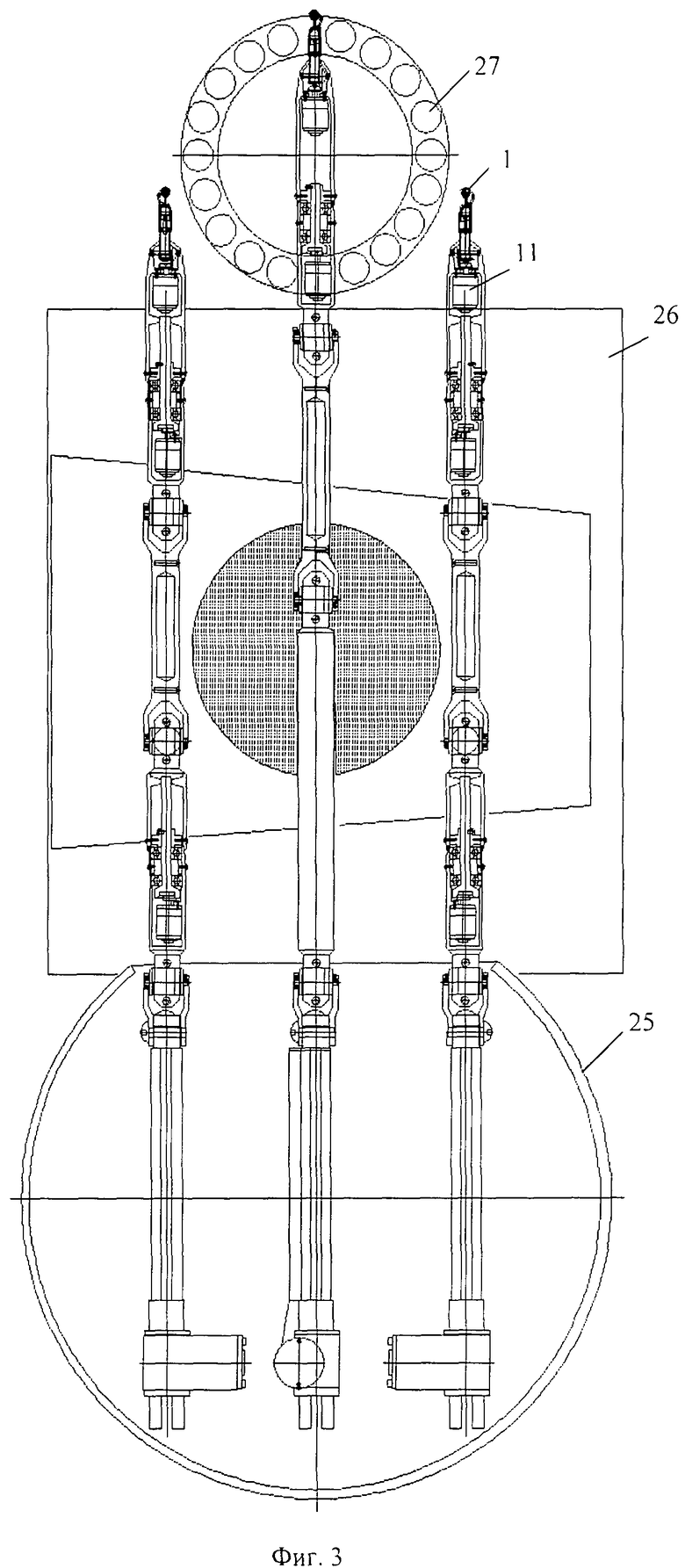
На фиг.1 изображено устройство осевого возвратно-поступательного разворота исполнительного элемента приема и удержания хирургических элементов в многофункциональной дагностико-хиругической робототехнической системе для операционного стола с возможностью информационно-компьютерного управления. На фиг.2 изображено устройство зажима инструмента, функционально связанное с устройством разворота его в плоскости и осевого разворота. На фиг.3 изображена робототехническая системы операционного стола с возможностью информационно-компьютерного управления.
Устройство осевого возвратно-поступательного разворота исполнительного элемента приема и удержания хирургических элементов в многофункциональной дагностико-хиругической робототехнической системе для операционного стола с возможностью информационно-компьютерного управления содержит устройство зажима 1 инструмента 2, реализованного с возможностью возвратно-поступательного смещения в корпусе зажима 3 посредством возвратно-поступательного смещения привода 4 с фиксирующим стержнем 5. При этом корпус 3 с зажимом 1 хирургических элементов 2 с противоположной стороны 6 расположения зажима 1 зафиксирован на конической шестеренке 7 для возвратно-поступательного смещения в осевой плоскости первой части корпуса смещения 8 зажима 1 и шарнирно соединен с верхней частью осевого стержня 9 конической шестеренки 7, которая функционально связана с конической шестеренкой 10 привода 11 возвратно-поступательного разворота корпуса 3 с зажимом хирургических элементов 2. При этом привод 11 возвратно-поступательного разворота корпуса 3 с зажимом 1 зафиксирован на первой 12 и второй 13 половине первой части корпуса 8 смещения зажима 1, которые совместно образуют корпус цилиндрической формы и с противоположной стороны 14 расположения зажима 1 зафиксированы между собой посредством ограничителя 15, который зафиксирован на одном конце осевого стержневого элемента 16 осевого разворота зажима. При этом второй конец осевого стержневого элемента 16 выполнен с конической шестеренкой 17, которая функционально связана с конической шестеренкой 18 привода осевого разворота 19, который зафиксирован внутри второй части корпуса, который также выполнен в в виде двух половин 20 и 21, соединенных посредством шайбы 22. На фиг.2 изображено последовательное соединение устройства зажима 1, устройства разворота в плоскости 23 и устройства осевого разворота 24 зажима 1. На фиг.3 изображен корпус робототехнической системы 25, хирургический стол 26 и инструментальный стол 27.
Устройство осевого возвратно-поступательного разворота исполнительного элемента приема и удержания хирургических элементов в многофункциональной дагностико-хиругической робототехнической системе для операционного стола с возможностью информационно-компьютерного управления в данном исполнении может быть использовано для ориентированного приема (фиг.3) хирургических инструментов с инструментального стола 27 и диагностических устройств, функционально связанных с операционным столом 26. А реализуют эту процедуру (фиг.1) посредством устройства зажима 1, который включает фиксирующий стержень 5, функционально связанный с приводом 4 с возможностью возвратно-поступательного смещения внутри корпуса зажима 3. При этом корпус 3 зажима 1 в позиции 6 зафиксирован с конической шестеренкой 7 и шарнирно связан с верхней частью осевого стержня 9 конической шестеренки 7 и осуществляет совместный разворот посредством конической шестеренки 10 и привода 11, который зафиксирован внутри корпуса смещения 8 зажима, состоящего из первой 12 и второй 13 его части. С другой стороны корпуса смещения 8 зажима первая 12 и вторая 13 его части зафиксированы между собой посредством ограничителя 15, который расположен на осевом стержневом элементе 16 разворота корпуса 8 для разворота зажима 1 после приема инструмента 2. При этом корпус осевого разворота зажима выполнен из двух частей 8 и 20, 21 цилиндрической формы, одна часть 20, 21 включает зафиксированный внутри привод 19 с конической шестеренкой 18, функционально связанной с конической шестеренкой 17 осевого стержневого элемента 16 разворота второй части корпуса 8; внутри которого он зафиксирован в центральной части ограничителя 15, а верхняя часть ограничителя 15 зафиксирована внутри второй части корпуса 8 разворота, при этом на осевом стержневом элементе 16 между его конической шестеренкой 17 и ограничителем 15 расположены два разнесенных подшипника с шайбой 22 между ними, которая зафиксирована с первой частью 21 и 22 корпуса осевого разворота.
Использование предложенного технического решения позволяет расширить функциональные возможности устройства захвата хирургических инструментов и диагностических устройств в дагностико-хиругический системах операционного стола с возможностью информационно-компьютерного управления.
Изобретение относится к медицинской технике и может быть использовано в робототехнической системе при выполнении различных медицинских процедур. Предложено устройство осевого возвратно-поступательного разворота исполнительного элемента приема и удержания хирургических элементов в многофункциональной диагностико-хирургической робототехнической системе для операционного стола с возможностью информационно-компьютерного управления, включающее корпус с зажимом хирургических элементов посредством стержня, функционально связанный с приводом возвратно-поступательного смещения, и корпус разворота зажима, при этом корпус осевого разворота зажима выполнен из двух частей цилиндрической формы, одна из которых включает зафиксированный внутри привод с конической шестеренкой, функционально связанной с конической шестеренкой осевого стержневого элемента разворота второй части корпуса, внутри которого он зафиксирован в центральной части ограничителя, а верхняя часть ограничителя зафиксирована внутри второй части корпуса разворота, при этом на осевом стержневом элементе между его конической шестеренкой и ограничителем расположены два разнесенных подшипника с шайбой между ними, которая зафиксирована с первой частью корпуса осевого разворота. Изобретение позволяет расширить функциональные возможности устройства захвата хирургических инструментов и диагностических устройств в диагностико-хирургических системах операционного стола с возможностью информационно-компьютерного управления. 3 ил.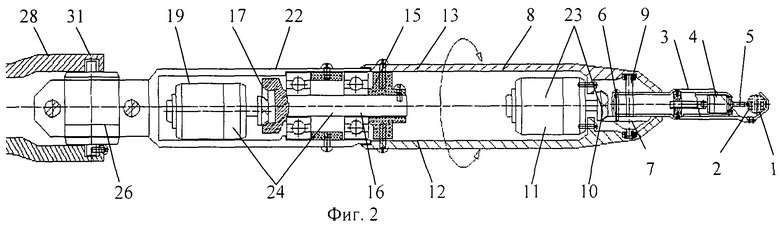
Устройство осевого возвратно-поступательного разворота исполнительного элемента приема и удержания хирургических элементов в многофункциональной диагностико-хирургической робототехнической системе для операционного стола с возможностью информационно-компьютерного управления, включающее корпус с зажимом хирургических элементов посредством стержня, функционально связанный с приводом возвратно-поступательного смещения, и корпус разворота зажима, отличающееся тем, что корпус осевого разворота зажима выполнен из двух частей цилиндрической формы, одна из которых включает зафиксированный внутри привод с конической шестеренкой, функционально связанной с конической шестеренкой осевого стержневого элемента разворота второй части корпуса, внутри которого он зафиксирован в центральной части ограничителя, а верхняя часть ограничителя зафиксирована внутри второй части корпуса разворота, при этом на осевом стержневом элементе между его конической шестеренкой и ограничителем расположены два разнесенных подшипника с шайбой между ними, которая зафиксирована с первой частью корпуса осевого разворота.
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| ХИРУРГИЧЕСКИЙ АППАРАТ С СИСТЕМОЙ ОБРАТНОЙ СВЯЗИ | 2007 |
|
RU2435538C2 |
| CN 101396298 A, 01.04.2009 | |||
| US 5911722 A, 15.06.1999. | |||

