(54) ЗАХВАТ МАНИПУЛЯТОРА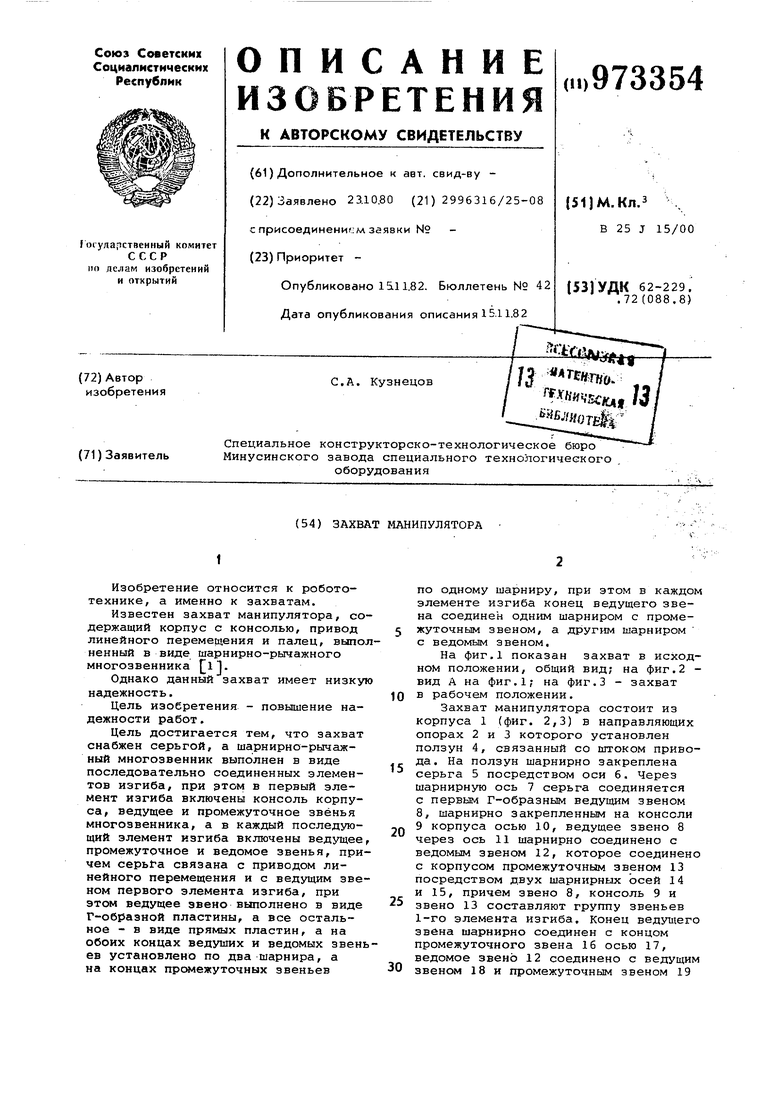
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1976 |
|
SU558789A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
| Захват манипулятора | 1979 |
|
SU772843A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Захват робота | 1980 |
|
SU889422A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356726C1 |
| Захват | 1972 |
|
SU440249A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
Изобретение относится к робототехнике, а именно к захватам.
Известен захват манипулятора, содержащий корпус с консолью, привод линейного перемещения и палец, выполненный в виде шарнирно-рычажного многозвенника llОднако данный захват имеет низкую надежность.
Цель изобретения - повышение надежности работ.
Цель достигается тем, что захват снабжен серьгой, а шарнирно-рычажный многозвенник выполнен в виде последовательно соединенных элементов изгиба, при этом в первый элемент изгиба включены консоль корпуса, ведущее и промежуточное звенья многозвенника, а в каждый последующий элемент изгиба включены ведущее, промежуточное и ведомое звенья, причем серьга связана с приводом линейного перемещения и с ведущим звеном первого элемента изгиба, при этом ведущее звено выполнено в виде Г-образной пластины, а все остальное - в виде прямых пластин, а на обоих концах ведуших и ведомых звеньев установлено по два шарнира, а на концах промежуточных звеньев
по одному шарниру, при этом в каждом элементе изгиба конец ведущего звена соединен одним шарниром с промежуточным звеном, а другим шарниром с ведомым звеном.
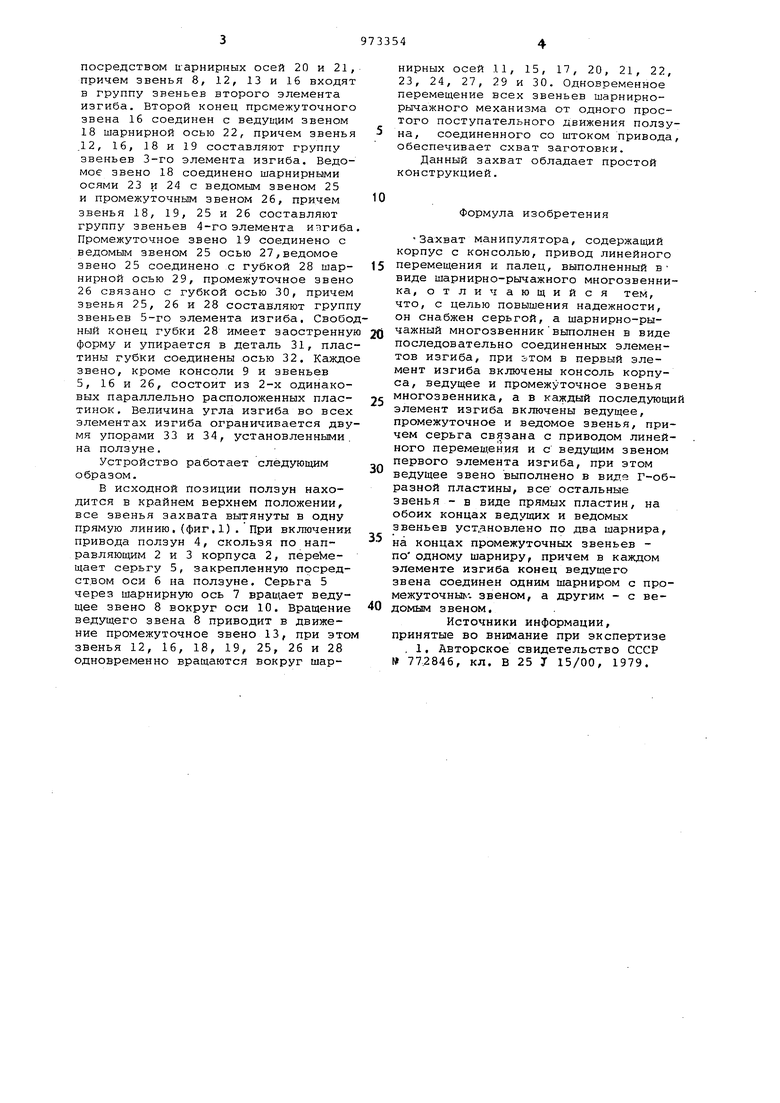
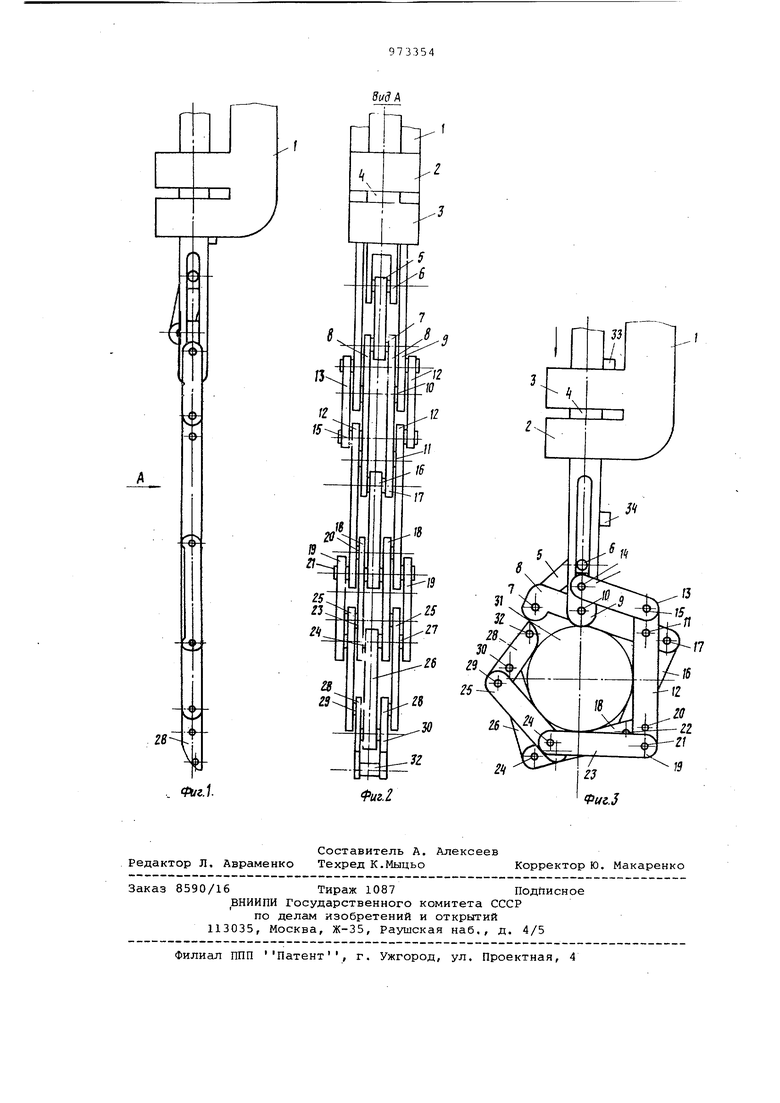
На фиг.1 показан захват в исходном положении, общий вид; на фиг.2 вид А на фиг.1; на фиг.З - захват в рабочем положении.
10
Захват манипулятора состоит из корпуса 1 (фиг. 2,3) в направляющих опорах 2 и 3 которого установлен ползун 4, связанный со штоком привода. На ползун шарнирно закреплена
t5 серьга 5 посредством оси 6. Через шарнирную ось 7 серьга соединяется с первым Г-образным ведущим звеном 8, шарнирно закрепленным на консоли 9 корпуса осью 10, ведущее звено 8
20 через ось 11 шарнирно соединено с ведомым звеном 12, которое соединено с корпусом промежуточным звеном 13 посредством двух шарнирных осей 14 и 15, причем звено 8, консоль 9 и
25 звено 13 составляют группу звеньев 1-го элемента изгиба, конец ведущего звена шарнирно соединен с концом промежуточного звена 16 осью 17, ведомое эвено 12 соединено с ведущим
30 звеном 18 и промежуточным звеном 19
посредством Цэрнирных осей 20 и 21, причем звенья 8, 12, 13 и 16 входят в группу звеньев второго элемента изгиба. Второй конец промежуточного звена 16 соединен с ведущим звеном 18 шарнирной осью 22, причем звенья 12, 16, 18 и 19 составляют группу звеньев 3-го элемента изгиба. Ведомое звено 18 соединено шарнирньшии осями 23 и 24 с ведомым звеном 25 и промежуточным звеном 26, причем звенья 18, 19, 25 и 26 составляют группу звеньев 4-го элемента итгиба Промежуточное звено 19 соединено с ведомым звеном 25 осью 27,ведомое звено 25 соединено с губкой 28 шарнирной осью 29, промежуточное звено 26 связано с губкой осью 30, причем звенья 25, 26 и 28 составляют групп звеньев 5-го элемента изгиба. Свобоный конец губки 28 имеет заостренну форму и упирается в деталь 31, пластины губки соединены .осью 32. Каждо звено, кроме консоли 9 и звеньев 5, 16 и 26, состоит из 2-х одинаковых параллельно расположенных пластинок. Величина угла изгиба во всех элементах изгиба ограничивается двумя упорами 33 и 34, установленными, на ползуне.
Устройство работает следующим образом.
В исходной позиции ползун находится в крайнем верхнем положении, все звенья захвата вытянуты в одну прямую линию,(фиг,), При включении привода ползун 4, скользя по направляющим 2 и 3 корпуса 2, nepeKieщает серьгу 5, закрепленную посредством оси 6 на ползуне. Серьга 5 через шарнирную ось 7 вращает ведущее звено 8 вокруг оси 10. Вращение ведущего звена 8 приводит в движение промежуточное звено 13, при это звенья 12, 16, 18, 19, 25, 26 и 28 одновременно вращаются вокруг шарнирных осей 11, 15, 17, 20, 21, 22, 23, 24, 27, 29 и 30. Одновременное перемещение всех звеньев шарнирнорычажного механизма от одного простого поступательного движения ползуна, соединенного со щтоком привода, обеспечивает схват заготовки.
Данный захват обладает простой конструкцией.
Формула изобретения
Захват манипулятора, содержащий корпус с консолью, привод линейного перемещения и палец, выполненный в виде шарнирно-рЕлчажного многозвенника, отличающийся тем, что, с целью повышения надежности, он снабжен серьгой, а шарнирно-рычажный многозвенниквыполнен в виде последовательно соединенных элементов изгиба, при этом в первый элемент изгиба включены консоль корпуса, ведущее и промежуточное звенья многозвенника, а в каждый последующи элемент изгиба включены ведущее, промежуточное и ведомое звенья, причем серьга связана с приводом линейного перемещения и с ведущим звеном первого элемента изгиба, при этом ведущее звено выполнено в виде г-образной пластины, все остальные звенья - в виде прямых пластин, на обоих концах ведущих и ведомых звеньев установлено по два шарнира, на концах промежуточных звеньев По одному шарниру, причем в каждом элементе изгиба конец ведущего звена соединен одним шарниром с промежуточныь-. звеном, а другим - с ведомым звеном.
Источники информации, принятые во внимание при экспертизе
. 1, Авторское свидетельство СССР № 772846, кл. В 25 J 15/00, 1979.
