Предлагаемые технические решения относятся к контрольно-измерительной технике и могут быть использованы для непрерывного неразрушающего контроля, оценки и прогнозирования технического состояния конструкций и инженерных сооружений, например потенциально-опасных участков трубопроводов, в течение всего периода их эксплуатации.
Известны способы и устройства дистанционного контроля и диагностики состояния конструкций и инженерных сооружений (авт.свид. СССР №№934.269, 1.458.647, 1.695.161, 1.733.837, 1.781.564, 1.781.577, 1.812.386; патенты РФ №№2.037.797, 2.046.311, 2.079.829, 2.135.887, 2.146.810, 2.190.152, 2.194.919, 2.206.817, 2.229.703, 2.230.978, 2.247.958, 2.276.304; патенты США №№3.170.152, 3.851.521, 4.206.402, 5.894.092; патент Франции №2.294.389; Лапшин Б.М. и др. Автоматизированная система непрерывного контроля герметичности подводных нефтепроводов. - Нефтяное хозяйство, 1989, №10, с.63, рис.1; Кармазинов Ф.В., Заренков Д.В., Дикарев В.И., Койнаш Б.В. Вода, нефть, газ и трубы в нашей жизни. СПб, 2005, «Техническая книга», с.179-214 и другие).
Из известных способов и устройств наиболее близкими к предлагаемым являются «Способ дистанционного контроля и диагностики состояния конструкций и инженерных сооружений и устройство для его осуществления» (патент РФ №2.247.958, G01M 5/00, 2003), которые и выбраны в качестве прототипов.
Известный способ заключается в том, что на пункте контроля регистрируют сигналы с блоков измерения, установленных в местах диагностирования конструкций, и сравнивают их с заранее зафиксированными значениями. При этом блоки измерения устанавливают на элемент конструкции, изготовленный из того же материала, что и вся конструкция. Проводят метрологическую аттестацию элемента конструкции путем установления зависимостей между сигналами с блоков измерения и калиброванными внешними воздействиями, регистрируют их на пункте контроля и используют в качестве заранее зафиксированных сигналов. Врезают элемент с установленными на нем блоками измерения в места диагностирования конструкции, и по отклонению поступивших сигналов с блоков измерения от заранее зарегистрированных сигналов судят о состоянии конструкции. Устройство содержит пункт контроля, блоки измерения, размещенные в местах диагностирования конструкции, преобразователи, линию связи, контроллер. Причем блоки измерения размещены на метрологически аттестованном элементе конструкции, изготовленном из того же материала, что и вся конструкция, и врезанном в места диагностирования конструкции. Элемент конструкции соединен с соответствующими преобразователями, связанными своими выходами с входом контроллера, подключенного к модему, который через линию связи своим выходом соединен с пунктом контроля.
В известных технических решениях одними из основных элементов являются блоки измерения и преобразователи, в качестве которых используются датчики деформации, линейных сдвигов, давления, вибраций, температуры, влажности, расхода и т.д. При этом преобразователи основаны на различных физических принципах. Широко известны индуктивные, потенциометрические и тензорезистивные преобразователи.
Достоинством индуктивных датчиков и преобразователей являются:
- точность (0,1%) измерений в большом диапазоне перемещений (±20 мм) в широком диапазоне температур от -55 до +85°C;
- разрешающая способность (10-3 мм);
- высокая линейность (0,1%);
- надежность (10-6);
- технологичность;
- практически не зависят от атмосферных условий;
- пригодны к использованию в условиях чрезвычайно агрессивной среды.
Основными недостатками являются:
- высокая потребляемая мощность от 100 до 500 Вт;
- сложность в обработке снимаемых сигналов;
- требуют питания стабильным синусоидальным напряжением.
Достоинством потенциометрических датчиков и преобразователей являются:
- точность измерений (0,5%) в большом диапазоне перемещений, в широком диапазоне температур от -40 до +65°C;
- разрешающая способность (10-2 мм);
- надежность (10-6);
- высокая линейность (0,5%);
- малая потребляемая мощность от 2 до 10 мВт.
Основными недостатками являются:
- малая эффективность в диапазоне перемещений менее ±1 мм;
- износ потенциометрического элемента;
- высокая цена.
Достоинством тензометрических датчиков и преобразователей являются:
- точность измерений (1%) в диапазоне перемещений (±0,2; ±2,0; ±5,0 мм) в широком диапазоне температур от -40 до +65°C;
- разрешающая способность (10-3 мм);
- малая потребляемая мощность от 1 до 5 мВт, что очень важно для беспроводных систем мониторинга.
Основными недостатками являются:
- старение тензочувствительных элементов;
- наличие гистерезиса.
Следовательно, основными недостатками известных датчиков и преобразователей являются высокое энергопотребление и низкая надежность.
Высокое энергопотребление связано с наличием источников питания (батарей и аккумуляторов) и работой датчиков и преобразователей в непрерывном режиме. Поскольку процесс, например, деформации трубопровода очень медленный и только в экстренных ситуациях требуется непрерывный поток информации, алгоритм работы известных способа и устройства позволяет задавать интервалы опроса блоков измерения от 5 секунд до 1 месяца. В большинстве случаев для мониторинга трубопроводов достаточно 1-2 измерений в сутки.
Низкая надежность известных блоков измерений и преобразователей связана с надежностью источников питания и с необходимостью их регулярной замены. Как правило, продолжительность работы любого источника питания не превышает нескольких дней.
Высокое энергопотребление и низкая надежность блоков измерения и преобразователей снижают эффективность способа и устройства дистанционного контроля и диагностики состояния конструкций и инженерных сооружений.
Технической задачей изобретения является повышение эффективности способа и устройства дистанционного контроля и диагностики состояния конструкций и инженерных сооружений путем снижения энергопотребления и повышения надежности блоков измерения и преобразователей.
Поставленная задача решается тем, что способ дистанционного контроля и диагностики состояния конструкции и инженерных сооружений, заключающийся, в соответствии с ближайшим аналогом, в том, что на пункте контроля регистрируют сигналы с блоков измерения, установленных в местах диагностирования конструкции, сравнивают их с заранее зафиксированными значениями и по отклонению поступивших сигналов от заранее зафиксированных судят о наличии изменений контролируемых параметров, при этом изготавливают элемент конструкции из того же материала, что и вся конструкция, размещают на нем блоки измерения, проводят метрологическую аттестацию элемента с размещенными на нем блоками измерения путем установления зависимостей между сигналами с блоков измерения и калиброванными внешними воздействиями, регистрируют эти зависимости на пункте контроля и используют их в качестве заранее зафиксированных сигналов, врезают элемент с установленными на нем блоками измерения в места диагностирования конструкции и по отклонению поступивших сигналов с блоков измерения от заранее зарегистрированных сигналов судят о состоянии конструкции, отличается от ближайшего аналога тем, что блоки измерения и преобразователи выполняют в виде линий задержки на поверхностных акустических волнах, на контроллере последовательно формируют m гармонических колебаний на разных несущих частотах, облучают ими линии задержки, настроенные на m несущие частоты, на каждой линии задержки электромагнитное гармоническое колебание преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну в электромагнитный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревых преобразователей поверхностных акустических волн, которая отражает порядковый номер линии задержки и величину контролируемого параметра, сложный сигнал с фазовой манипуляцией излучают в эфир, принимают на контроллере, осуществляют синхронное детектирование, выделяют низкочастотное напряжение, соответствующее порядковому номеру линии задержки и фазовому сдвигу, соответствующему внешнему воздействию, и направляют его в микропроцессор с запоминающим устройством, в котором производят расчет и преобразование поступившей информации.
Поставленная задача решается тем, что устройство дистанционного контроля и диагностики состояния конструкций и инженерных сооружений, содержащее, в соответствии с ближайшим аналогом, пункт контроля, блоки измерения, размещенные в местах диагностирования конструкции, преобразователи, линию связи, контроллер, при этом блоки измерения размещены на метрологически аттестованном элементе конструкции, изготовленном из того же материала, что и вся конструкция, и врезанном в места диагностирования конструкции, элемент конструкции, с размещенными на нем блоками измерения, соединен с соответствующими преобразователями, связанными своими выходами с входом контроллера, подключенного к модему, который через линию связи своим выходом соединен с пунктом контроля, отличается от ближайшего аналога тем, что контроллер снабжен считывателем, а каждый блок измерения и преобразователь выполнены в виде линии задержки на поверхностных акустических волнах, причем считыватель содержит последовательно включенные синхронизатор, синтезатор несущих частот, дуплексер, вход-выход которого связан с приемопередающей антенной, усилитель высокой частоты и фазовый детектор, второй вход которого соединен с выходом синтезатора несущих частот, а выход подключен к входу микропроцессора с запоминающим устройством, выход которого соединен с входом модема, каждая линия задержки содержит пьезокристалл, на поверхность которого нанесены входной и выходной встречно-штыревые преобразователи, входной и выходной поглотители, при этом входной встречно-штыревой преобразователь соединен с микрополосковой приемопередающей антенной, а выходной встречно-штыревой преобразователь соединен с согласованной нагрузкой, импеданс которой зависит от внешнего воздействия.
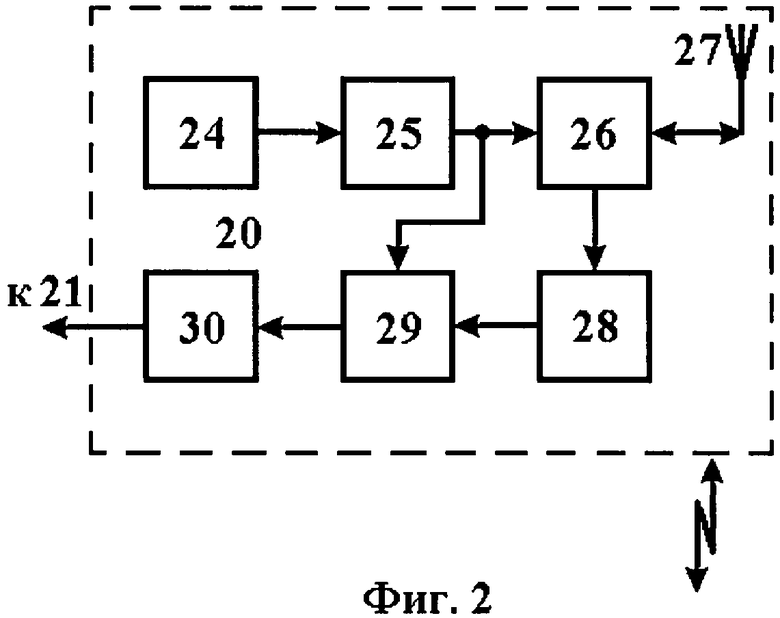
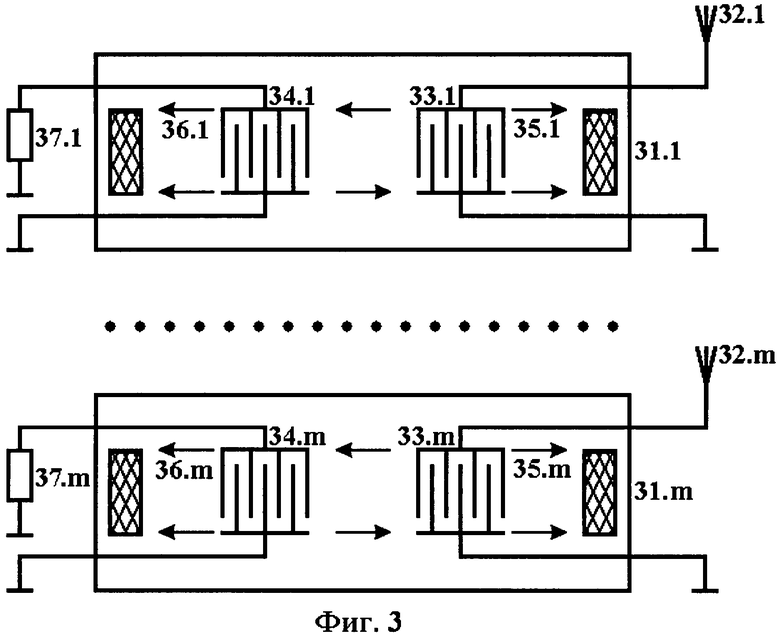
Структурная схема устройства, реализующего предлагаемый способ дистанционного контроля и диагностики состояния конструкций и инженерных сооружений, представлена на фиг.1. Структурная схема контроллера 20 изображена на фиг.2. Функциональные схемы блоков измерения и преобразователей на основе линий задержки показаны на фиг.3.
Устройство состоит из элемента 1 конструкции, изготовленного из того же материала, что и контролируемый участок конструкции, на котором расположены блоки измерения:
- деформации 2, механического напряжения 3, вибрации 4, давления 5, расхода 6, температуры 7 транспортируемого продукта, температуры 8 грунта, электрического тока 9, электрического потенциала 10 с электродом сравнения.
Выходы блоков 2-9 и 10 измерения соединены с входами соответствующих преобразователей 11-19, выходы которых, в свою очередь, соединены с входом контроллера 20. Выход контроллера 20 подключен к модему 21, который своим выходом соединен через линию связи 22 с входом удаленного пункта 23 контроля.
Контроллер 20 содержит последовательно включенные синхронизатор 24, синтезатор 25 несущих частот, дуплексер 26, вход-выход которого связан с приемопередающей антенной 27, усилитель 28 высокой частоты, фазовый детектор 29, второй вход которого соединен с выходом синтезатора 25 несущих частоты, и микропроцессор 30 с запоминающим устройством, выход которого подключен к входу модема 21. Все блоки, кроме микропроцессора 30 с запоминающим устройством, образуют считыватель.
Каждый блок измерения и преобразователь выполнен в виде линии задержки на поверхностных акустических волнах (ПАВ) и содержит пьезокристалл 31.j, на поверхности которого нанесены входной 33.j и выходной 34.j встречно-штыревые преобразователи (ВШП), входной 35.j и выходной 36.j поглотители. При этом входной ВШП 33.j соединен с микрополосковой приемопередающей антенной 32.j, а выходной ВШП 34.j соединен с согласованной нагрузкой 37.j, импеданс которой зависит от внешнего воздействия (деформации, механического напряжения, вибрации, давления, расхода, температуры, электрического тока) (j=1, 2, …, m).
Предлагаемый способ осуществляется описанным устройством следующим образом (на примере трубопровода).
В процессе эксплуатации трубопровода происходит изменение его технологических параметров, обусловленное старением и дефектами конструкции. Поскольку процесс деформации трубопровода очень медленный и только в экстренных ситуациях требуется непрерывный поток информации, алгоритм работы устройства позволяет задавать интервалы опроса блоков измерения от десятков секунд до 1 месяца. В большинстве случаев для мониторинга трубопровода достаточно 1-2 измерений в сутки. При этом в качестве блоков измерений и преобразователей используются линии задержки на ПАВ, основной особенностью которых являются малые габариты и отсутствие источников питания (батарей, аккумуляторов). Каждая линия задержки настроена на определенную частоту, которая зависит от количества электродов ВШП и расстояния между ними.
Кодированный командный сигнал с кодом, соответствующим заданному измерительному трубопроводному патрубку, подается с удаленного пункта 23 контроля по линии 22 связи через модем 21 на контроллер 20 и переводит его из ждущего режима в режим измерения. При этом синхронизатор 24 включает синтезатор 25 несущих частот, который последовательно формирует гармонические колебания:
u1(t)=U1·Cos(w1t+φ1),
u2(t)=U2·Cos(w2t+φ2),
………………………………………………
uj(t)=Uj·Cos(wjt+φj),
………………………………………………
um(t)=Um·Cos(wmt+φm), 0≤t≤T,
которые через дуплексер 26 последовательно во времени поступают в приемопередающую антенну 23 и излучаются ею в эфир, обеспечивая облучение соответствующих линий задержки на ПАВ.
Энергия высокочастотного электромагнитного колебания, принимаемого микрополосковой приемопередающей антенной 32.j, поступает на электроды входного ВШП 33.j, вызывая механическое гармоническое колебание в пьезоэлектрической подложке линии задержки за счет явления обратного пьезоэффекта. Механические колебания порождают поверхностную акустическую волну (ПАВ), которая распространяется как в направлении выходного ВШП 34.j, так и в направлении входного поглотителя 35.j. Механические колебания приводят к изменению разности потенциалов между электродами ВШП 34.j (явление прямого пьезоэффекта), что вызывает появление высокочастотного тока, протекающего через цепь нагрузки 37.j. Отраженная от ВШП 34.j в сторону выходного поглотителя 36.j и в сторону ВШП 33.j ПАВ, ослабленная по амплитуде за счет вносимых звукопроводом линии задержки потерь, приводит к изменению разности потенциалов между электродами ВШП 33.j, вызывая в нагрузке (микрополосковой приемопередающей антенне 32.j) высокочастотный ток (j=1, 2, …, m). Антенна 32.j излучает сложные ФМн-сигналы:
uc1(t)=Uc1·Cos[w1t+φк1(t)+φ1+Δφ1],
uc2(t)=Uc2·Cos[w2t+φк2(t)+φ2+Δφ2],
………………………………………………………………………………
ucj(t)=Ucj·Cos[wjt+φкj(t)+φj+Δφj],
………………………………………………………………………………
ucm(t)=Ucm·Cos[wmt+φкm(t)+φm+Δφm], 0≤t≤T,
где φкj(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с внутренней структурой ВШП, отражающей порядковый номер j линии задержки;
Δφj - фазовый сдвиг, соответствующий внешним воздействиям (деформации, механическое напряжение, вибрации, давление и т.п), под влиянием которых изменяется импеданс нагрузки 37.j и коэффициент отражения.
Поглотители 35.j и 36.j обеспечивают режим бегущих акустических волн.
Сложные ФМн-сигналы ucj(t) (j=1, 2, …, m) последовательно принимаются приемопередающей антенной 27 контроллера 20 и через дуплексер 26 и усилитель 28 высокой частоты поступают на первый вход фазового детектора 29, на второй вход которого подаются гармонические колебания uj(t) с выхода синтезатора 25 несущих частот в качестве опорных напряжений. В результате синхронного детектирования на выходе фазового детектора 29 последовательно выделяются низкочастотные напряжения
Uнj(t)=Uнj·Cos[φкj(t)+Δφj],
где  ;
;
пропорциональные порядковому номеру линии задержки и контролируемому параметру (деформации, механическому напряжению, вибрации, давлению и т.п).
Опрос и контроль линий задержки, характеризующих расход, температуру транспортируемого продукта, температуру грунта, величину электрического тока и электрического потенциала производится аналогичным образом. Низкочастотные напряжения с выхода фазового детектора 29 последовательно поступают в микропроцессор 30 с запоминающим устройством, который производит расчет и преобразование фазовых сдвигов Δφi в цифровой вид. Результат вычислений последовательно подается на модем 21 и через линию 22 связи на удаленный пункт 23 контроля, где этот результат сравнивается с данными, полученными при метрологической аттестации, и проводится анализ технического состояния трубопровода.
При метрологической аттестации устройства определение статических характеристик линий задержки и всего устройства в целом проводится по ГОСТ 8.508-84, по которому статические характеристики определяются с заданными уровнями точности и достоверности в виде полиномов от задаваемых внешних воздействий.
Метрологическая аттестация патрубка осуществляется до его врезки в трубопровод.
Патрубок с установленными на нем датчиками, который после аттестации становится многоканальным измерительным устройством, устанавливают на потенциально-опасном участке трубопровода, предварительно определенном проектом, и регистрируют поступающие сигналы, которые сравнивают с начальными, полученными при аттестации, и по статическим характеристикам, установив отклонение, оценивают состояние эксплуатационных характеристик участка трубопровода.
Таким образом, предлагаемые способ и устройство по сравнению с прототипами, другими техническими решениями аналогичного назначения обеспечивают повышение эффективности дистанционного контроля и диагностики состояния конструкции и инженерных сооружений, например потенциально-опасных участков трубопроводов, в течение всего периода их эксплуатации. Это достигается за счет снижения энергопотребления и повышения надежности датчиков, которые являются одним из основных элементов устройства, реализующего предлагаемый способ.
Основной особенностью датчиков в виде линий задержки на ПАВ являются малые габариты и отсутствие источников питания (батарей, аккумуляторов).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дистанционного контроля и диагностики состояния конструкций и инженерных сооружений и устройство для его осуществления | 2018 |
|
RU2685578C1 |
| Способ дистанционного контроля состояния конструкций и устройство для его осуществления | 2020 |
|
RU2734446C1 |
| СИСТЕМА ИЗМЕРЕНИЙ И ДОЛГОВРЕМЕННОГО КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ | 2015 |
|
RU2582233C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2678109C2 |
| СИСТЕМА МОНИТОРИНГА БЕЗОПАСНОЙ ЭКСПЛУАТАЦИИ ЗДАНИЙ И ИНЖЕНЕРНО-СТРОИТЕЛЬНЫХ СООРУЖЕНИЙ | 2011 |
|
RU2472129C1 |
| СПОСОБ ОПТИМИЗАЦИИ СТРУКТУРЫ УСТРОЙСТВА | 2013 |
|
RU2571537C2 |
| Способ контроля состояния здания и конструкций и устройство для его осуществления | 2019 |
|
RU2728246C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ КОНСТРУКЦИЙ И ИНЖЕНЕРНО-СТРОИТЕЛЬНЫХ СООРУЖЕНИЙ | 2011 |
|
RU2473873C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ И ВЫЯВЛЕНИЯ ЗАЯВЛЕННЫХ НА ПОИСК АВТОМОБИЛЕЙ ПРИ ПРОХОЖДЕНИИ КОНТРОЛЬНЫХ ПУНКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478232C1 |
| Способ идентификации транспортных средств при прохождении контрольных пунктов и устройство для его осуществления | 2021 |
|
RU2774222C1 |
Группа изобретений относится к контрольно-измерительной технике и может быть использована для непрерывного неразрушающего контроля, оценки и прогнозирования технического состояния конструкций и инженерных сооружений, например потенциально-опасных участков трубопроводов, в течение всего периода их эксплуатации. Устройство, реализующее предлагаемый способ, содержит элемент 1 конструкции, блоки измерения: деформации 2, механического напряжения 3, вибрации 4, давления 5, расхода 6, температуры 7 транспортируемого продукта, температуры 8 грунта, электрического тока 9, электрического потенциала 10 с электродом сравнения, преобразователи 11-19, контроллер 20, модем 21, линию 22 связи и пункт 23 контроля. Контроллер 20 содержит считыватель и микропроцессор 30 с запоминающим устройством. Блоки измерения и преобразователи выполняют в виде линий задержки на поверхностных акустических волнах. При этом каждая линия задержки содержит пьезокристалл. Технический результат - повышение эффективности способа и устройства дистанционного контроля и диагностики состояния конструкций и инженерных сооружений путем снижения энергопотребления и повышения надежности блоков измерения и преобразователей. 2 н.п. ф-лы, 3 ил.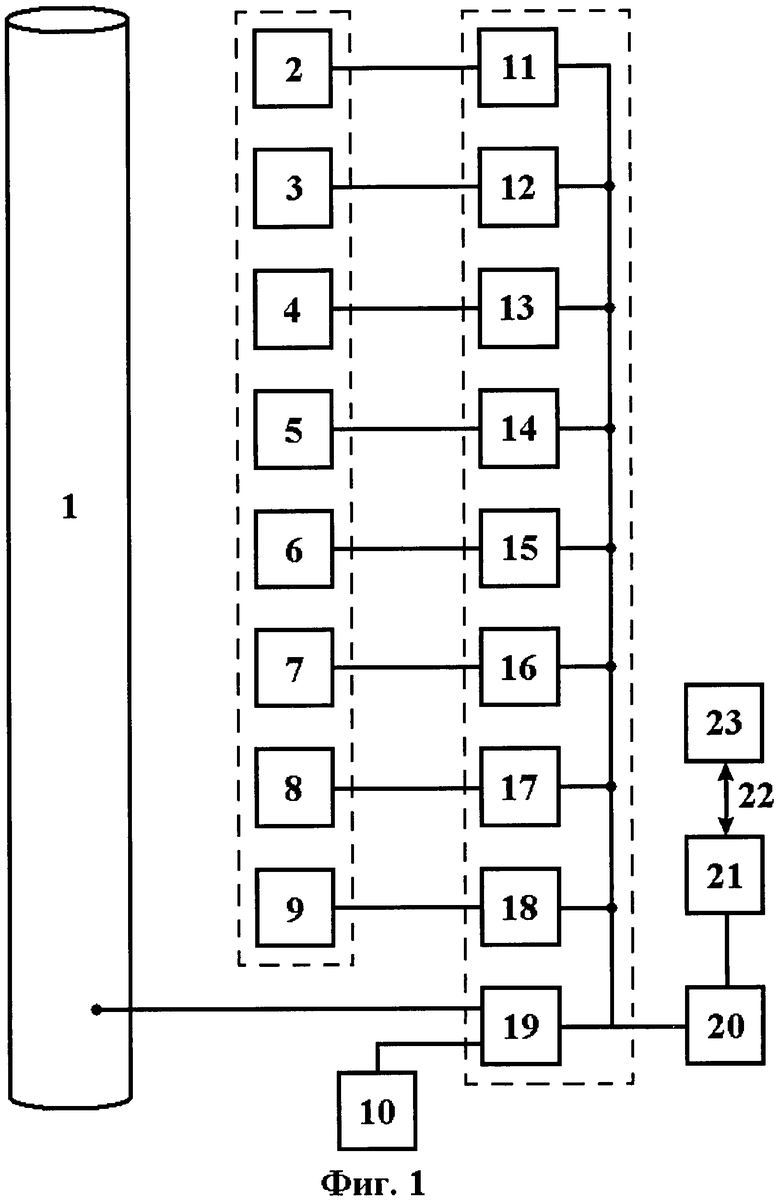
1. Способ дистанционного контроля и диагностики состояния конструкций и инженерных сооружений, заключающийся в том, что на пункте контроля регистрируют сигналы с блоков измерения, установленных в местах диагностирования конструкции, сравнивают их с заранее зафиксированными значениями и по отклонению поступивших сигналов от заранее зафиксированных судят о наличии изменений контролируемых параметров, при этом изготавливают элемент конструкции из того же материала, что и вся конструкция, размещают на нем блоки измерения, проводят метрологическую аттестацию элемента с размещенными на нем блоками измерения путем установления зависимостей между сигналами с блоков измерения и калиброванными внешними воздействиями, регистрируют эти зависимости на пункте контроля и используют их в качестве заранее зафиксированных сигналов, врезают элемент с установленными на нем блоками измерения в места диагностирования конструкции и по отклонению поступивших сигналов с блоков измерения от заранее зарегистрированных сигналов судят о состоянии конструкции, отличающийся тем, что блоки измерения и преобразователи выполняют в виде линий задержки на поверхностных акустических волнах, на контроллере последовательно формируют m гармонических колебаний на разных несущих частотах, облучают ими линии задержки, настроенные на m несущие частоты, на каждой линии задержки электромагнитное гармоническое колебание преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну в электромагнитный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревых преобразователей поверхностных акустических волн, которая отражает порядковый номер линии задержки и величину контролируемого параметра, сложный сигнал с фазовой манипуляцией излучают в эфир, принимают на контроллере, осуществляют синхронное детектирование, выделяют низкочастотное напряжение, соответствующее порядковому номеру линии задержки и фазовому сдвигу, соответствующему внешнему воздействию, и направляют его в микропроцессор с запоминающим устройством, в котором производят расчет и преобразование поступившей информации.
2. Устройство дистанционного контроля и диагностики состояния конструкций и инженерных сооружений, содержащее пункт контроля, блоки измерения, размещенные в местах диагностирования конструкции, преобразователи, линию связи, контроллер, при этом блоки измерения размещены на метрологически аттестованном элементе конструкции, изготовленном из того же материала, что и вся конструкция, и врезанном в места диагностирования конструкции, элемент конструкции с размещенными на нем блоками измерения, соединен с соответствующими преобразователями, связанными своими выходами с входом контроллера, подключенного к модему, который через линию связи своим выходом соединен с пунктом контроля, отличающееся тем, что контроллер снабжен считывателем, а каждый блок измерения и преобразователь выполнены в виде линии задержки на поверхностных акустических волнах, причем считыватель содержит последовательно включенные синхронизатор, синтезатор несущих частот, дуплексер, вход-выход которого связан с приемопередающей антенной, усилитель высокой частоты и фазовый детектор, второй вход которого соединен с выходом синтезатора несущих частот, а выход подключен к входу микропроцессора с запоминающим устройством, выход которого соединен с входом модема, каждая линия задержки содержит пьезокристалл, на поверхность которого нанесены входной и выходной встречно-штыревые преобразователи, входной и выходной поглотители, при этом входной встречно-штыревой преобразователь соединен с микрополосковой приемопередающей антенной, а выходной встречно-штыревой преобразователь соединен с согласованной нагрузкой, импеданс которой зависит от внешнего воздействия.
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ КОНСТРУКЦИИ И ИНЖЕНЕРНЫХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2247958C2 |
| Одноканальный ультразвуковой расходомер | 1980 |
|
SU901828A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА И ВРЕМЕНИ ПОЯВЛЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2005 |
|
RU2291345C1 |
| Способ получения легко растворимых в воде с нейтральной реакцией производных диаминоди-оксиарсенобензола | 1927 |
|
SU6663A1 |
| JP 2002924 А, 08.01.1990 | |||
| US 90043530 A1, 2.02.2009 | |||
| Методы акустического контроля металлов/ Под ред | |||
| Н.П.Алешина | |||
| - М: Машиностроение, 1989, с.157. | |||

