Предлагаемые способ и устройство относятся к контрольно-измерительной технике, а именно к автоматическим средствам непрерывного отслеживания состояния конструкции здания или инженерно-строительного сооружения в процессе его эксплуатации, позволяющим своевременно выявить превышение допустимых деформаций и температур конструкции и предупреждать ее разрушение и возникновении пожара.
Известные способы и устройства дистанционного контроля и диагностики состояния конструкций здания или инженерно-строительных сооружений (авт. свид. СССР №№1.458.647, 1.695.161, 1.733.837, 1.781.555, 1.812.386; патенты РФ №№2.037.797, 2.046.311, 2.049.307, 2.100.866, 2.135.997, 2.230.978, 2.247.958, 2.272.993, 2.276.304, 2.327.105, 2.343.446, 2.369.205, 2.417.369, 2.425.396, 2.471.162, 2.485.676, 2.518.428, 2.576.548, 2.582.233, 2.678.109; патенты США №№3.170.152, 3.851.521, 4.206.402, 4.452.087, 5.894.092; патент Великобритании №2.260.434; патент Франции №2.294.389; Ренский А.Б. Руководство по тензометрированию строительных конструкций и материалов. - М., 1971. С. 133, 141-155; Казачек B.C. и др. Обследование и испытание зданий и сооружений. - М.: Высшая школа, 2006, С. 164 и другие).
Из известных способов и устройств наиболее близкими к предлагаемым является «Способ контроля состояния конструкции здания или инженерно-строительного сооружения и устройство для его осуществления» (патент РФ №2.678.109, G01B 7/00, 2017), которые и выбраны в качестве прототипов.
Известные технические решения обеспечивают определение только деформации конституции здания или инженерно-строительного сооружения.
Однако в ряде случае необходимо дистанционно контролировать температуры конструкции здания или инженерно-строительного сооружения, от которой зависит вероятность возникновения пожара в конструкции здания или инженерно-строительного сооружения, от которой зависит вероятность возникновения пожара в конструкции здания или инженерно-строительного сооружения.
Технической задачей изобретения является расширение функциональных возможностей известных технических решений путем дистанционного определения температуры конструкции здания или инженерно-строительного сооружения.
Поставленная задача решается тем, что способ контроля состояния конструкции здания или инженерно-строительного сооружения, включающий, в соответствии с ближайшим аналогом, опрос датчиков, установленных в местах диагностирования конструкции, преобразовании полученной с датчиков информации и ее передачу на пункт контроля, выполненный в виде компьютера с программным обеспечением, где осуществляют регистрацию и сравнение полученной информации с заранее введенными в память компьютера фиксированными величинами, при этом формируют условное изображение контролируемого объекта, повторяющее его конструкцию, размещают на нем в местах, соответствующих реальному расположению датчиков, цветные метки-индикаторы, выводят упомянутое изображение с метками-индикаторами на экран монитора компьютера, обеспечивая постоянную связь упомянутых меток-индикаторов с датчиками, в качестве фиксированной величины для каждого датчика используют полученное путем предварительных расчетов предельно допустимое значение измеряемого параметра, а результаты опроса датчиков и результаты сравнения последней принятой с них информации отражают в реальном времени через цвет меток-индикаторов и его смену на условном изображении объекта по которому судят об исправности датчиков и состоянии конструкции, при этом в качестве датчиков используют радиочастотные метки на поверхностных акустических волнах, каждая из которых имеет свой идентификационный код, для дистанционного считывания каждой радиочастотной метки формируют зондирующее гармоническое колебание, на частоте w1 усиливают его по мощности, излучают в пространство, принимают радиочастотными метками, преобразуют в каждой радиочастотной метке в акустическую волну, обеспечивают ее распространение по поверхности звукопровода и обратное отражение, преобразуют отраженную акустическую волну в сложный сигнал с фазовой манипуляцией, внутренняя структура которого определяется структурой первого встречно-штыревого преобразователя, частота (ω1±Ωд1) определяется несущей частотой ω1 и девиацией частоты ±Ωд1, обусловленной величиной нагрузки на конструкцию, а фазовый сдвиг Δφ1 определяется степенью деформации конструкции, на которой устанавливают радиочастотную метку, излучают сложный сигнал с фазовой манипуляцией в пространство, улавливают считывающим устройством, выделяют сигналы с частотами (ω1±Ωд1) и (ω1-Ωд1), перемножают между собой, выделяют первое напряжение разностной частоты, пропорциональное удвоенному значению доплеровской частоты 2Ωд1, регистрируют его и направляют в блок предварительной обработки сигналов, и первое напряжение суммарной частоты, удваивают частоту зондирующего гармонического колебания, выделяют его и сравнивают по фазе с первым напряжением суммарной частоты, измеряют удвоенное значение фазового сдвига 2Δφ1, регистрируют его и направляют в блок предварительной обработки сигналов, сложный сигнал с фазовой манипуляцией на частоте (ω1±Ωд1) умножают и делят по фазе на два, выделяют гармоническое колебание на частоте (ω1±Ωд1), используют его в качестве опорного напряжения для синхронного детектирования сложного сигнала с фазовой манипуляцией на частоте (ω1±Ωд1), выделяют низкочастотное напряжение, пропорциональное идентификационному коду радиочастотной метки, регистрируют его и направляют в блок предварительной обработки сигналов, отличается от ближайшего аналога тем, что зондирующее гармоническое колебание на частоте w1 умножают само на себя, выделяют гармоническое колебание на частоте (w2=2w1), суммируют с гармоническим колебанием на частоте w1, суммарное гармоническое колебание на частоте (wΣ=w2+w1) усиливают по мощности и излучают в пространство, при этом каждый датчик снабжают вторым встречно-штыревым преобразователем, частота (ω2±Ωд2), которого определяется несущей частотой w2 и девиацией частоты Ωд2, обусловленной температурой конструкции, а фазовый сдвиг Δφ2 определяется диапазоном изменения температуры конструкции, на которой устанавливают радиочастотную метку, излучают сложный сигнал с фазовой манипуляцией в пространство, улавливают считывающим устройством, выделяют сигналы с частотами (ω2+Ωд2) и (ω2-Ωд2), перемножают между собой, выделяют второе напряжение разностной частоты, пропорциональное удвоенному значению доплеровской частоты 2Ωд2, регистрируют и направляют в блок предварительной обработке сигналов, и второе напряжение суммарной частоты, удваивают частоту ω2 зондирующего гармонического колебания, выделяют его и сравнивают по фазе со вторым напряжением суммарной частоты, измеряют удвоенное значение фазового сдвига 2Δφ2, регистрируют и направляют в блок предварительной обработки сигналов.
Поставленная задача решается тем, что устройство контроля состояния конструкции здания или инженерно-строительного сооружения, содержащее, в соответствии с ближайшим аналогом, пункт контроля, характеризующийся использованием компьютера, измерительные преобразователи, размещенные в местах диагностирования конструкции, связанный с ними блок предварительной обработки сигналов, включающий плату аналого-цифрового преобразователя, средства связи блока предварительной обработки сигналов с упомянутым компьютером, выполненным с возможностью опроса измерительных преобразователей, приема и регистрации сигналов, содержащих измерительную информацию, и с возможностью сравнения упомянутой информации с заранее внесенными в его память фиксированными, и средства наглядного представления информации, включающее выведенное на экран монитора компьютера условное изображение контролируемой конструкции и цветные метки-индикаторы, размещенные на упомянутом изображении в соответствии с размещением измерительных преобразователей и выполненное с возможностью отражения в реальном времени посредством своего цвета и его изменения исправности соответствующего измерительного преобразователя и результатов сравнения последней принятой с него информации, при этом компьютер выполнен с возможностью одновременного со сменой цвета метки индикатора вывода на экран дополнительных сведений о типе и исполнении элемента конструкции, на котором размещен соответствующий упомянутой метке-индикатору измерительный преобразователь, считывающее устройство, а в качестве измерительных преобразователей использованы радиочастотные метки на поверхностных акустических волнах, причем считывающее устройство содержит подключенный к выходу блока предварительной обработки сигналов, задающий генератор, последовательно включенные усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, первый полосовой фильтр, первый перемножитель, второй вход которого через второй полосовой фильтр соединен с выходом дуплексера, и первый фильтр разностной частоты, выход которого подключен к первому входу блока регистрации и к первому входу блока предварительной обработки сигналов, к выходу первого перемножителя последовательно подключены первый фильтр суммарной частоты и первый фазометр, выход которого подключен к второму входу блока регистрации и к второму входу блока предварительной обработки сигналов, к второму выходу задающего генератора последовательно подключены первый удвоитель фазы и первый узкополосный фильтр, выход которого соединен с вторым входом первого фазометра, к выходу первого полосового фильтра последовательно подключены второй удвоитель фазы, первый делитель фазы на два, второй узкополосный фильтр и фазовый детектор, второй вход которого соединен с выходом первого полосового фильтра, а выход подключен к третьему входу блока регистрации и к третьему входу блока предварительной обработки сигналов, каждая радиочастотная метка имеет свой идентификационный код и выполнена в виде последовательно размещенных на поверхности пьезокристалла микрополосковой антенны, первого встречно-штыревого преобразователя, первой мембраны и первого набора отражателей, при этом первый встречно-штыревой преобразователь состоит из двух гребенчатых систем электродов, связанных между собой шинами, которые соединены с микрополосковой приемо-передающей антенной, отличается от ближайшего аналога тем, что оно снабжено вторым и третьим перемножителями, третьим и четвертым узкополосными фильтрами, сумматором, третьим и четвертым полосовыми фильтрами, вторым фильтром разностной частоты, вторым фазометром и третьим удвоителем фазы, причем к выходу задающего генератора последовательно подключены второй перемножитель, второй вход которого соединен с выходом задающего генератора, третий узкополосный фильтр и сумматор, а выход подключен к входу усилителя мощности, к выходу дуплексера последовательно подключены третий полосовой фильтр, третий перемножитель, второй вход которого через четвертый полосовой фильтр соединен с выходом дуплексера, и второй фильтр разностной частоты, выход которого подключен к четвертому входу блока регистрации и к четвертому входу блока предварительной обработки сигналов, к выходу третьего перемножителя последовательно подключены второй фильтр суммарной частоты и второй фазометр, выход которого подключена к пятому входу блока регистрации и к пятому входу блока предварительной обработки сигналов, к выходу третьего узкополосного фильтра последовательно подключены третий удвоитель фазы и четвертый узкополосный фильтр, выход которого соединен с вторым входом второго фазометра, на поверхности пьезокристалла последовательно размещены второй встречно-штыревой преобразователь, вторая мембрана и второй набор отражателей, при этом второй встречно-штыревой преобразователь также состоит из двух гребенчатых систем электродов, связанных между собой шинами, которые соединены с общей микрополосковой приемопередающей антенной.
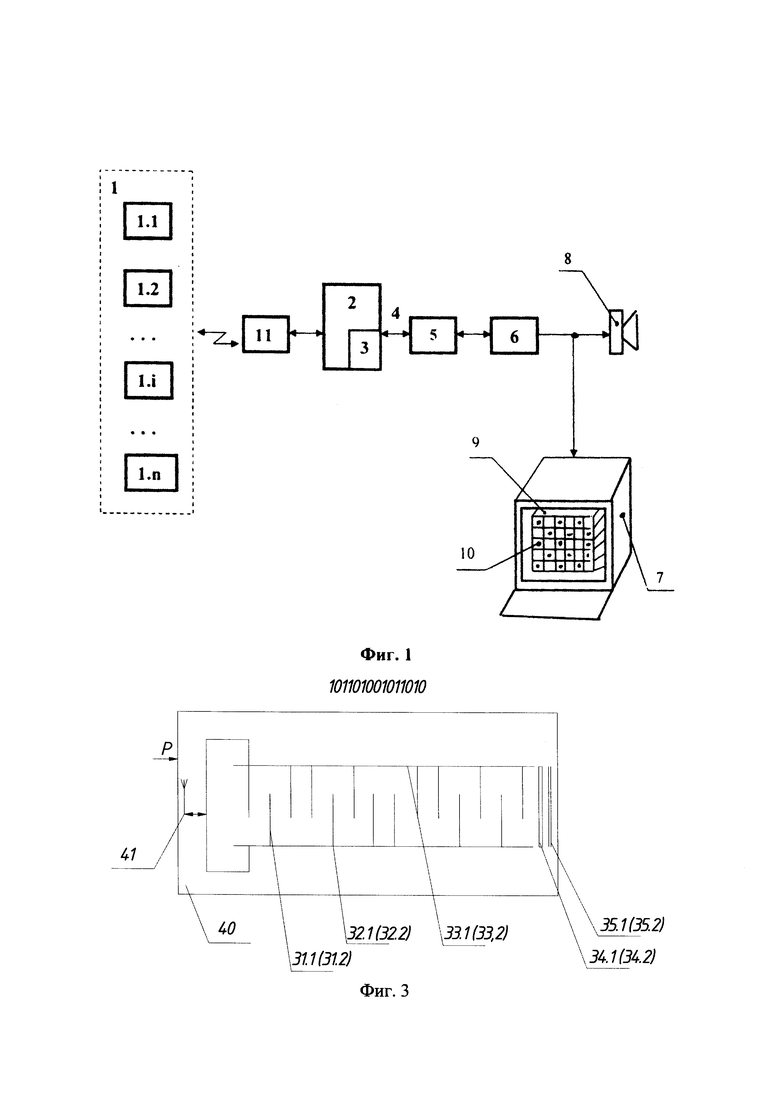
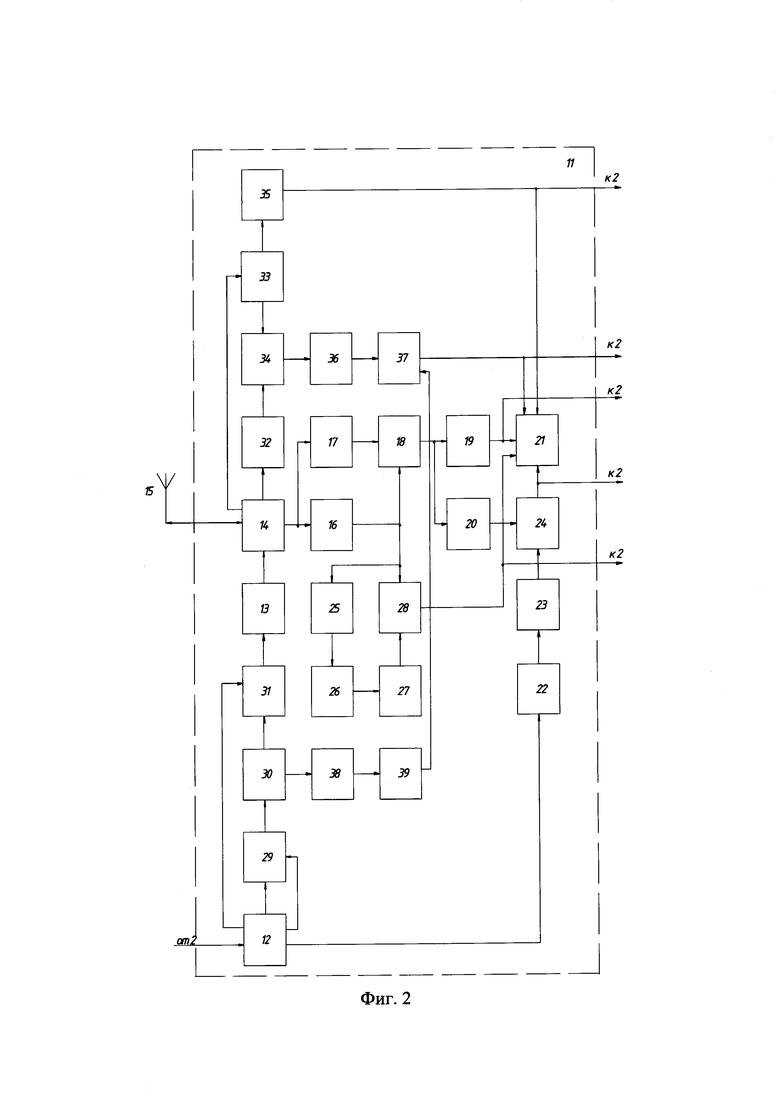
Структурная схема устройства, реализующего предлагаемый способ, представлен на фиг. 1. Структурная схема считывающего устройства (ридера) изображена на фиг. 2. Функциональная схема радиочастотной метки (транспондера) на поверхностных акустических волнах (ПАВ) показана на фиг. 3.
Устройство контроля состояния конструкции здания или инженерно-строительного сооружения содержит набор измерительных преобразователей (транспондеров) 1, последовательно связанные ридер 11, блок 2 предварительной обработки сигналов, включающий плату аналого-цифрового преобразователя 3, линию связи - шину 4, устройство согласования сигналов - конвертор 5, пункт контроля, выполненный в виде компьютера 6, и связанные с последним монитор 7, и устройство 8 звуковой сигнализации. На экран монитора 7 выведено условное изображение 9 контролируемой конструкции с размещенными на ней цветными метками-индикаторами 10.
Считывающее устройство (ридер) 11 содержит последовательно подключенные к выходу блока 2 предварительной обработки сигналов задающий генератор 12, второй перемножитель 29, второй вход которого соединен с выходом задающего генератора 12, третий узкополосный фильтр 30, сумматор 31, второй вход которого соединен с выходом задающего генератора 12, усилитель 13 мощности, дуплексер 14, вход-выход которого связан с приемопередающей антенной 15, первый полосовой фильтр 16, первый перемножитель 18, второй вход которого через второй полосовой фильтр 17 соединен с выходом дуплексера 14, и первый фильтр 19 разностной частоты, выход которого соединен с первым входом блока 21 регистрации и с первым входом блока 2 предварительной обработки сигналов. К выходу первого перемножителя 18 последовательно подключены первый фильтр 20 суммарной частоты и первый фазометр 24, выход которого соединен с вторым входом блока 21 регистрации и с вторым входом блока 2 предварительной обработки сигналов. К второму выходу задающего генератора 12 последовательно подключены первый удвоитель 22 фазы и первый узкополосный фильтр 23, выход которого соединен с вторым входом первого фазометра 24.
К выходу первого полосового фильтра 16 последовательно подключены второй удвоитель 25 фазы, первый делитель 26 фазы на два, второй узкополосный фильтр 27 и фазовый детектор 28, второй вход которого соединен с выходом первого полосового фильтра 16, а выход подключен к третьему входу блока 21 регистрации и к третьему входу блока 2 предварительной обработки сигналов.
К выходу дуплексера 14 последовательно подключены третий полосовой фильтр 32, третий перемножитель 34, второй вход которого через четвертый полосовой фильтр 33 соединен с выходом дуплексера 14, и второй фильтр 35 разностный частоты, выход которого подключен к четвертому входу блока 21 регистрации и к четвертому входу блока 2 предварительной обработки сигналов.
К выходу третьего перемножителя 34 последовательно подключены второй фильтр 36 суммарной частоты и второй фазометр 37, выход которого подключен к пятому входу блока 21 регистрации и к пятому входу блока 2 предварительной обработки сигналов.
К выходу третьего узкополосного фильтра 30 последовательно подключены третий удвоитель фазы 38 и четвертый узкополосный фильтр 39, выход которого соединен с вторым входом второго фазометра 37.
Каждая радиочастотная метка 1.i (I=1, 2, …, n) содержит последовательно размещенные на поверхности пьезокристалла 40 микрополосковую приемопередающую антенну 41, встречно-штыревой преобразователь (ВШП) I(II), мембрану 34.1 (34.2) и набор 35.1 (35.2) отражателей. При этом ВШП I(II) содержит две гребенчатые системы электродов 31.1 (31.2), соединенные между собой шинами 32.1 (32.2) и 33.1 (33.2). Шина 32.1 (32.2) и 33.1 (33.2), в свою очередь, соединены общей микрополосковой приемопередающей антенной 41.
Предлагаемый способ контроля осуществляется посредством предлагаемого устройства следующим образом.
Осуществляют установку транспондеров 1.i (i=1, 2, …, n) в наиболее опасных сечениях конструкции, подверженных наибольшим нагрузкам и температурам. Среди них может быть железобетонные и металлические балки, различные вертикальные опоры, плиты перекрытий и т.п. Упомянутые места обычно определяет конструктор здания или инженерно-строительного сооружения.
В память компьютера 6 заносят расчетные величины предельно допустимой деформации и температуры, для каждого контролируемого элемента конструкции здания или инженерно-строительного сооружения, на который устанавливается транспондер, а также сведения о типе конструкции, месте его расположения и другая необходимая при принятии решения информация.
За зданием (сооружением) устанавливают постоянный надзор на протяжении всего периода эксплуатации. Системы находятся в постоянном режиме самодиагностики.
Компьютер 6 в соответствии с заданной программой производит поочередный опрос транспондеров 1.i (i=1, 2, …, n). Для чего задающим генератором 12 формируется гармоническое колебание

где u1, ω1, ϕ1, Т1 - амплитуда, несущая частота, начальная фаза и длительность гармонического колебания,
которое поступает на первый вход сумматора 31 и на два входа второго перемножителя 29, на выходе которого образуются следующие гармонические колебания

где  w2=2w1, ϕ2=2ϕ1,
w2=2w1, ϕ2=2ϕ1,
которое выделяется третьим узкополосным фильтром 30 и поступает на второй вход сумматора 31.
На выходе сумматора 31 образуется суммарное напряжение

которое после усиления в усилителе 13 мощности через дуплексер 14 поступает в приемопередающую антенну 15 и изучается ею в эфир, улавливается микрополосковой приемопередающей антенной 41 транспондера и преобразуется первым I и вторым II ВШП в акустические волны, которые распространяются по поверхности пьезокристалла (звукопровода) 40, отражаются от набора отражателей 35.1 и 35.2 и преобразуются ВШП в сложные сигналы с фазовой манипуляцией (ФМн):


где ±Ωg1 - девиация частоты, обусловленная деформацией конструкции здания или инженерно-строительного сооружения;
±Ωg2 - девиации частоты, обусловленная изменением температуры конструкции здания или инженерно-строительного сооружения;
ϕk(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим колом M(t), который определяется внутренней структурой ВШП;
Δϕ1 - изменение фазы, вызванное деформацией мембраны 34.1, которая обусловлена степенью деформации конструкции;
Δϕ2 - изменение фазы, вызванное деформацией мембраны 34.2, которая обусловлена степенью изменения температуры конструкции.
В основу работы устройства на ПАВ лежит три физических процесса:
- преобразование входного электрического сигнала в акустическую волну;
- распространение акустической волны по поверхности пьезокристалла (звукопровода);
- отражение акустической волны и обратное преобразование ПАВ в электрический кодированный сигнал.
Для прямого и обратного преобразования ПАВ используется ВШП I и II, работа которых основана на том, что переменные в пространстве и времени электрического поля, создаваемые в пьезоэлектрическом кристалле системой электродов 31.1 и 31.2, вызывают из-за пьезоэффекта упругие деформации, которые распространяются в кристалле в виде ПАВ. Резонансная частота каждого транспондера определяется расстоянием между электродами. При этом транспондер находится в свободном (ненапряженном) состоянии. При воздействии нагрузки Р резонансная частота увеличивается на девиацию частоты (w1+Ωg1). Это происходит за счет деформации пьезокристалла и уменьшения расстояния между электродами 31.1. Если происходит растяжение конструкции здания или инженерно-строительного сооружения, то резонансная частота транспондера уменьшается (w1-Ωg1). Следовательно, по девиации частоты Ωg1 можно судить о нагрузках и деформациях конструкции зданий или инженерно-строительного сооружения.
Аналогично происходит регистрация температуры Т конструкции здания или инженерно-строительного сооружения.
В этом случае чувствительный элемент, выполненный, например, в виде тонкой мембраны 34.2, реагирует на температуру Т конструкции здания или инженерно-строительного сооружения.
Следует отметить, что изготовление ВШП осуществляется стандартными методами фотолитографии и травлением тонкой металлической пленки, осажденной на пьезоэлектрическом кристалле. Возможности современной фотолитографии позволяют создавать ВШП, работающих на частотах до 3 ГГц.
Сформированные сложные ФМн сигналы u3(t) и u4(t) излучаются микрополосковой приемопередающей антенной 41 в эфир, улавливающей приемопередающей антенной 15 ридера и через дуплексер 14 поступают на вход полосковых фильтров 16, 17, 32, и 33. Последние выделяют сложные ФМн сигналы соответственно:




которые поступают на два входа первого 18 и третьего 34 перемножителей. На выходе последних образуются напряжения разностных и суммарных частот:




где 
2ϕk(t)={0,2π}.
Напряжение первой разностной частоты up1(t) выделяется первым фильтром 19 разностной частоты и поступают на первый вход блока 21 регистрации и на первый вход блока 2 предварительно обработки сигналов. Напряжение второй разностной частоты up2(t) выделяется вторым фильтром 35 разностной частоты и поступает на четвертый вход блока 21 регистрации и на четвертый вход блока 2 предварительной обработки сигналов.
Напряжение первой суммарной частоты up1(t) выделяются первым фильтром 20 суммарной частоты и поступает на первый вход фазометра 24.
Гармоническая колебание u1(t) со второго выхода задающего генератора 12 поступает на вход первого удвоителя 22 фазы, на входе которого образуется гармоническое колебание

где 
которое выделяется узкополосным фильтром 23 и поступает на второй вход первого фазометра 24. На выходе последнего образуется напряжение

где 
которое поступает на второй вход блока 21 регистрации и на второй вход блока 2 предварительной обработки сигналов.
Напряжение второй суммарной частоты  выделяется вторым фильтром 36 суммарной частоты и поступает на первый вход второго фазометра 37.
выделяется вторым фильтром 36 суммарной частоты и поступает на первый вход второго фазометра 37.
Гармоническое колебание u2(t) с выхода узкополосного фильтра 30 поступает на вход третьего удвоителя 38 фазы, на выходе которого образуется гармоническое колебание

где 
которое выделяется узкополосным фильтром 39 и поступает на второй вход второго фазометра 37. На выходе последнего образуется напряжение

где 
которое поступает на пятый вход блока 21 регистрации и на пятый вход блока 2 предварительной обработки сигналов.
Сложный ФМн сигнал u5(t) с выхода полосового фильтра 16 одновременно поступает на первый (информационный) вход фазового детектора 28 и на вход второго удвоителя 25 фазы. На выходе последнего образуется гармоническое колебание


которое поступает на вход делителя 26 фазы на два. На выходе последнего образуется гармоническое колебание

которое выделяется узкополосным фильтром, используется в качестве опорного напряжения и подается на второй (опорный) вход фазового детектора 28. В результате синхронного детектирования на выходе фазового детектора 28 образуется низкочастотное напряжение

где 
пропорциональное идентификационному коду радиочастотной метки. Это напряжение поступает на третий вход блока 21 регистрации и на третий вход блока 2 предварительной обработки сигналов.
В блоке 2 предварительной обработки сигналов напряжения up1(t), up2(t), 
 и uн(t) преобразуются в цифровую форму с помощью аналого-цифрового преобразователя 3 и передаются на цифровую шину 4. Конвертор 5 осуществляет преобразование сигналов к виду, пригодному для обработки в компьютере 6. Компьютер 6 регистрирует сигналы, несущие измерительную информацию, и осуществляет сравнение полученных данных с заранее введенными в память предельными величинами. Сравнение может осуществляться, например, путем нахождения разности между упомянутыми величинами.
и uн(t) преобразуются в цифровую форму с помощью аналого-цифрового преобразователя 3 и передаются на цифровую шину 4. Конвертор 5 осуществляет преобразование сигналов к виду, пригодному для обработки в компьютере 6. Компьютер 6 регистрирует сигналы, несущие измерительную информацию, и осуществляет сравнение полученных данных с заранее введенными в память предельными величинами. Сравнение может осуществляться, например, путем нахождения разности между упомянутыми величинами.
На экран дисплея 7 выводится условное изображение 9 контролируемой конструкции с размещенными на ней цветными метками-индикаторами 10, соответствующими транспондерами 1.i (i=1, 2, …, n). Работа транспондеров, измерения девиации частоты ΩД1 и фазового сдвига Δφ1 которых находятся в допустимых пределах, отражается зеленным цветом метки-индикатора 10. Нерабочее состояние транспондера -отображается желтым цветом. Для отражения показаний транспондеров, превышающих предельно допустимые значения девиации частот Ωg1, Ωg2, Δϕ1, Δϕ2 предусмотрен красный цвет индикатора.
В память компьютера 6 заносят расчетные величины предельно допустимой деформации и температуры для каждого конкретного элемента конструкции здания или инженерно-строительного сооружения, на который устанавливается транспондер, а также сведения о типе конструкции, месте его расположения и другая необходимая при принятии решения информация.
При превышении полученной с транспондера 1 информации предельно допустимого значения, т.е. когда происходит смена знака полученной разницы, компьютер 6 выдает сигнал на смену цвета соответствующей метки-индикатора 10 и на звуковое устройство 8, осуществляющее подачу звукового сигнала. Одновременно с этим производится обращение к памяти компьютера 6 и извлечение из нее всей имеющейся информации о том элементе строительной конструкции, на которой произошло превышение. Извлеченная информация выводится на экран дисплея 7.
Дежурный, в рабочей зоне которого расположен дисплей 7, фиксирует сигнал тревоги. Эксплуатация здания приостанавливается, производится эвакуация людей и специалисты производят обследование конструкции с которой поступил тревожный сигнал. После анализа принимается решение о дальнейшей эксплуатации здания.
Система позволяет предупреждать возникновение опасных деформаций и температур в зданиях и сооружениях на ранних стадиях и тем самым предотвратить разрушение и возникновения пожара, осуществить своевременную эвакуацию людей и материальных ценностей.
Постоянный контроль-надзор особенно важен при эксплуатации крупных, высотных зданий, преимущественно офисных, а также сооружений культурно-досугового характера, т.е. для тех зданий и сооружений, в которых происходит массовое скопление людей, так как в этом случае особенно необходимо быстрое реагирование на аварийную ситуацию и обеспечение оперативной эвакуации.
Заявляемая компьютерная система мониторинга строительных конструкций позволяет круглосуточно автоматически отслеживать состояние контролируемой конструкции и выводить наглядную информацию на пульт дежурного, который может быть расположен в комнате охраны здания, а может быть выведен на пульт полиции, МЧС или другой соответствующей организации.
Предлагаемые способ и устройство обеспечивают повышение эффективности и снижение энергопотребления контроля состояния конструкции здания или инженерно-строительного сооружения. Это достигается за счет снижения энергопотребления и повышения надежности датчиков, в качестве которых используются пассивные транспондеры (радиочастотные метки) на поверхностных акустических волнах (ПАВ), связанные радиочастотным каналом с ридером (считывающим устройством).
Транспондеры на ПАВ и ридер совместно с устройством для обработки информации (компьютером) образуют систему радиочастотной идентификации, основными преимуществами которой являются:
- малые габариты транспондеров на ПАВ и отсутствие источников питания (батарей, аккумуляторов);
- длительный срок эксплуатации радиочастотных меток (транспондеров);
- отсутствие физического контакта между транспондерами и ридером;
- высокая достоверность и скорость определения идентификационного кода радиочастотной метки и измеряемых ее параметров деформации и температуры строительной конструкции;
- большой объем информации, который могут нести пассивные транспондеры;
- радиочастотные метки (транспондеры) практически невозможно подделать;
- радиочастотная система может использоваться даже в агрессивных средах, а пассивные транспондеры могут читаться ридером через грязь, краску, пар, воду, пластмассу и древесину.
К основным характеристикам системы радиочастотной идентификации можно отнести следующие:
- мощность передатчика ридера средняя - не более 100 МВт;
- частотный диапазон - 400 т - 420 МГц, (900-920 МГц);
- дальность действия - не менее 50 м;
- количество кодовых комбинаций - 232-250;
- габариты транспондеров 8×15×5 мм;
- срок службы транспондера - не менее 20 лет;
- потребляемая транспондером мощность - 0 Вт.
Таким образом, предлагаемые способ и устройство по сравнению с прототипами и другими техническими решениями аналогичного назначения обеспечивают дистанционный контроль не только за деформацией конструкции здания или инженерно-строительного сооружения, но и за ее температурой, что позволяет своевременно предотвращать не только разрушение конструкции здания или инженерно-строительного сооружения, но и возникновения пожара. Это особенно важно при эксплуатации крупных, высотных и уникальных зданий и сооружений, т.е. для тех зданий и сооружений, в которых требуется быстрое реагирование на аварийную ситуацию и обеспечения оперативного принятия решения по восстановлению.
Кроме того, предлагаемые технические решения обеспечивают увеличении чувствительности при определении деформации и температуры конструкции здания или инженерно-строительного сооружения за счет увеличения в 2 раза девиации частот 2Ωg1, 2Ωg2 и фазовых сдвигов 2Δϕ1, 2Δϕ2.
Тем самым функциональные возможности известных способа и устройства расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2678109C2 |
| СИСТЕМА ИЗМЕРЕНИЙ И ДОЛГОВРЕМЕННОГО КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ | 2015 |
|
RU2582233C1 |
| Способ мониторинга состояния подземных сооружений и система для его реализации | 2019 |
|
RU2717079C1 |
| Система дистанционного контроля состояния резьбовых соединений строительных элементов и конструкций | 2018 |
|
RU2696668C1 |
| Сигнальный браслет для использования в чрезвычайной ситуации | 2019 |
|
RU2730883C1 |
| Автоматизированная система управления восстановлением объектов инфраструктуры | 2019 |
|
RU2721663C1 |
| Система автоматизированного управления строительным комплексом | 2018 |
|
RU2696064C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ КОНСТРУКЦИЙ И ИНЖЕНЕРНО-СТРОИТЕЛЬНЫХ СООРУЖЕНИЙ | 2011 |
|
RU2473873C1 |
| Способ мониторинга состояния подземных сооружений метрополитена и система для его реализации | 2020 |
|
RU2740514C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ СИГНАЛИЗАЦИИ О ПОМОЩИ ПРИ ВОЗНИКНОВЕНИИ ОПАСНОЙ СИТУАЦИИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2422906C1 |
Группа изобретений относится к контрольно-измерительной технике, а именно к автоматическим средствам непрерывного отслеживания состояния конструкции инженерно-строительного сооружения в процессе его эксплуатации. Техническим результатом является расширение функциональных возможностей известных технических решений путем дистанционного определения температуры конструкции здания или инженерно-строительного сооружения. Заявленный способ включает в себя приём информации с множества датчиков и её обработку. Устройство, реализующее предлагаемый способ, содержит набор измерительных преобразователей (транспондеров), блок предварительной обработки сигналов, аналого-цифровой преобразователь, шину, конвертор, компьютер, монитор, устройство звуковой сигнализации, условное изображение, метки-индикаторы и считывающее устройство. 2 н.п. ф-лы, 3 ил.
1. Способ контроля состояния конструкции здания или инженерно-строительного сооружения, включающий опрос датчиков, установленных в местах диагностирования конструкции, преобразование полученной с датчиков информации и ее передачи на пункт контроля, выполненный в виде компьютера с программным обеспечением, где осуществляют регистрацию и сравнение полученной информации с заранее введенными в память компьютера фиксированными величинами, при этом формируют условное изображение контролируемого объекта, повторяющее его конструкцию, размещают на нем в местах, соответствующих реальному расположению датчиков, цветные метки-индикаторы, выводят упомянутое изображение с метками-индикаторами на экран дисплея компьютера, обеспечивая постоянную связь упомянутых меток-индикаторов с датчиками, в качестве фиксированной величины для каждого датчика используют полученное путем предварительных расчетов и реально допустимое значение измеряемого параметра и результаты опроса датчиков и результаты сравнения последней принятой с них информации отражают в реальном времени через цвет меток-индикаторов и его смену на условном изображении объекта, по которому судят об исправности датчиков и состоянии конструкции, при этом в качестве датчиков используют радиочастотные метки на поверхностных волнах, каждая из которых имеет свой идентификационный код, для дистанционного считывания каждой радиочастотной метки формируют зондирующее гармоническое колебание, на частоте ω1 усиливают его по мощности, излучают в пространство, принимают радиочастотными метками, преобразуют в каждой радиочастотной метке в акустическую волну, обеспечивают ее распространение по поверхности звукопровода и обратное отражение, преобразуют отраженную акустическую волну в сложной сигнал с фазовой манипуляцией, внутренняя структура которого определяется структурой первого встречно-штыревого преобразователя, частота (ω1±ΩД1) определяется несущей частотой ω1 и девиацией частоты ΩД1, обусловленной величиной нагрузки на конструкцию, а фазовый сдвиг Δφ1 определяется степенью деформации конструкции, на которой устанавливают радиочастотную метку, излучают сложный сигнал с фазовой манипуляцией в пространство, улавливают считывающим устройством, выделяют сигналы с частотами (ω1+Ωд1) и (ω1-ΩД1), перемножают между собой, выделяют первое напряжение разностной частоты, пропорциональное удвоенному значению доплеровской частоты 2ΩД1, регистрируют его и направляют в блок предварительной обработки сигналов, и первое напряжение суммарной частоты, удваивают частоту ω1 зондирующего гармонического колебания, выделяют его и сравнивают по фазе с первым напряжением суммарной частоты, измеряют удвоенное значение фазового сдвига 2Δφ1, регистрируют его и направляют в блок предварительной обработки сигналов, сложный сигнал с фазовой манипуляцией на частоте (ω1+ΩД1) умножают и делят по фазе на два, выделяют гармоническое колебание на частоте (ω1+ΩД1), используют его в качестве опорного напряжения для синхронного детектирования сложного сигнала с фазовой манипуляцией на частоте (ω1+ΩД1), выделяют низкочастотное напряжение, пропорциональное идентификационному коду радиочастотной метки, регистрируют его и направляют в блок предварительной обработки сигналов, отличающийся тем, что зондирующее гармоническое колебание на частоте w1 умножают само на себя, выделяют гармоническое колебание на частоте w2=2w1, суммируют с гармоническим колебанием на частоте w1, суммарное гармоническое колебание на частоте wΣ=w1+w2 усиливают по мощности и излучают в пространство, при этом каждый датчик снабжен вторым встречно-штыревым преобразователем, частота (w1±Ωg2) которого определяется несущей частотой w2 и девиацией частотой Ωg2, обусловленной температурой конструкции, а фазовый сдвиг Δϕ2 определяется диапазоном изменяется диапазоном изменения температуры конструкции, на которой устанавливают радиочастотную метку, излучают сложный сигнал с фазовой манипуляцией в пространство, улавливают считывающим устройством, выделяют сигналы с частотами (w2+Ωg2) и (w2-Ωg2), перемножают между собой, выделяют второе напряжение разностный частоты, пропорциональное удвоенному значению доплеровской частоты 2Ωg2, регистрируют его и направляют в блок предварительной обработки сигналов, и второе напряжение суммарной частоты, удваивают частоту w2 зондирующего гармонического колебания, выделяют его и сравнивают по фазе со вторым напряжением суммарной частоты, измеряют удвоенное значение фазового сдвига 2Δϕ2, регистрируют и направляют в блок предварительной обработки сигналов.
2. Устройство контроля состояния конструкции здания или инженерно-строительного сооружения содержит пункт контроля, характеризующийся использованием компьютера, измерительные преобразователи, размещенные в местах диагностирования конструкции, связанный с ними блок предварительной обработки сигналов, включающий плату аналого-цифрового преобразователя, средства связи блока предварительной обработки сигналов с упомянутым компьютером, выполненным с возможностью опроса измерительных преобразователей, приема и регистрации сигналов, содержащих измерительную информацию, и с возможностью сравнения упомянутой информации с заранее внесенными в его память фиксированными величинами, и средства наглядного представления информации, включающие выведенное на экран дисплея компьютера условное изображение контролируемой конструкции и цветные метки-индикаторы, размещенные на упомянутом изображении в соответствии с размещением измерительных преобразователей и выполненные с возможностью отражения в реальном времени посредством своего цвета и его изменения исправности соответствующего измерительного преобразователя и результатов сравнения последней принятой с него информации, при этом компьютер выполнен с возможностью одновременного со сменой цвета метки-индикатора вывода на экран дополнительных сведений о типе и исполнении элемента конструкции, на котором размещен соответствующий упомянутой метке-индикатору измерительный преобразователь, считывающее устройство, а в качестве измерительных преобразователей использованы радиочастотные метки на поверхностных акустических волнах, причем считывающее устройство содержит подключенный к выходу блока предварительной обработки сигналов задающий генератор, последовательно включенные усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, первый полосовой фильтр, первый перемножитель, второй вход которого через второй полосовой фильтр соединен с выходом дуплексера, и первый фильтр разностной частоты, выход которого подключен к первому входу блока регистрации и к первому входу блока предварительной обработки сигналов, к выходу первого перемножителя последовательно подключены первый фильтр суммарной частоты и первый фазометр, выход которого подключен к второму входу блока регистрации и к второму входу блока предварительной обработки сигналов, к второму выходу задающего генератора последовательно подключены первый удвоитель фазы и первый узкополосный фильтр, выход которого соединен с вторым входом первого фазометра, к выходу первого полосового фильтра последовательно подключены второй удвоитель фазы, первый делитель фазы на два, второй узкополосный фильтр и фазовый детектор, второй вход которого соединен с выходом первого полосового фильтра, а выход подключен к третьему входу блока регистрации и к третьему входу блока предварительной обработки сигналов, каждая радиочастотная метка имеет свой идентификационный код и выполнена в виде последовательно размещенных на поверхности пьезокристалла микрополосковой приемопередающей антенны, первого встречно-штыревого преобразователя, первой мембраны и первого набора отражателей, при этом первый встречно-штыревой преобразователь состоит из двух гребенчатых систем электродов, связанных между собой шинами, которые соединены с микрополосковой приемопередающей антенной, отличающееся тем, что оно снабжено вторым и третьим перемножителями, третьим и четвертым узкополосными фильтрами, сумматором, третьим и четвертым полосковыми фильтрами, вторым фильтром разностной частоты, вторым фильтром суммарной частоты, вторым фазометром и третьим удвоителем фазы, причем к выходу задающего генератора последовательно подключены второй перемножитель, второй вход которого соединен с выходом задающего генератора, третий узкополосный фильтр и сумматор, второй вход которого соединен с выходом задающего генератора, а выход подключен к входу усилителя мощности, к выходу дуплексера последовательно подключены третий полосовой фильтр, третий перемножитель, второй вход которого через четвертый полосовой фильтр соединен с выходом дуплексера, и второй фильтр разностной частоты, выход которого подключен к четвертому входу блока регистрации и четвертому входу блока предварительной обработки сигналов, к выходу третьего перемножителя последовательно подключены второй фильтр суммарной частоты и второй фазометр, выход которого подключен к пятому входу блока регистрации и к пятому входу блока предварительной обработки сигналов, к выходу третьего узкополосного фильтра последовательно подключены третий удвоитель фазы и четвертый узкополосный фильтр, выход которого соединен с вторым входом второго фазометра, на поверхности пьезокристалла последовательно размещены второй встречно-штыревой преобразователь, вторая мембрана и второй набор отражателей, при этом второй встречно-штыревой преобразователь также состоит из двух гребенчатых систем электродов, связанных между собой шинами, которые соединены с общей микрополосковой приемопередающей антенной.
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2678109C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 2012 |
|
RU2514130C2 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПОДЗЕМНЫХ СООРУЖЕНИЙ МЕТРОПОЛИТЕНА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2425396C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ КОНСТРУКЦИЙ И ИНЖЕНЕРНЫХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2471161C1 |

