Предлагаемые способ и устройство относятся к контрольно-измерительной технике и могут быть использованы для непрерывного неразрушающего контроля, оценки и прогнозирования технического состояния конструкций и инженерных сооружений специальных объектов, например, потенциально-опасных участков трубопроводов систем жизнеобеспечения объектов военной инфраструктуры, в течение всего периода их эксплуатации.
Известны способы и устройства дистанционного контроля и диагностики состояния конструкций и инженерных сооружений (авт. свид. СССР №901.828, 934.269, 1.458.647, 1.695.161, 1.733.837, 1.781.564, 1.812.386; патенты РФ №2.037.797, 2.046.311, 2.079.829, 2.135.887, 2.146.810, 2.190.152, 2.194.919, 2.206.817, 2.229.703, 2.230.978, 2.247.958, 2.276.958, 2.291.345, 2.471.161, 2.685.578; патенты США №3.170.152, 3.851.521, 4.206.402, 5.894.092; патент Франции №2.294.389; Лапшин Б.М. и др. Автоматизированная система непрерывного контроля герметичности подводных нефтепроводов. - Нефтяное хозяйство, 1989, №10, с. 63, рис. 1; Кармазинов Ф.В., Заренков Д.В., Дикарев В.И., Койнаш Б.В. Вода, нефть, газ и трубы в нашей жизни. СПб, 2005, «Техническая книга», с. 179-214 и другие).
Из известных способов и устройств наиболее близкими к предлагаемым являются «Способ дистанционного контроля и диагностики состояния конструкций и инженерных сооружений и устройство для его осуществления» (патент РФ №2.685.578, G01M 7/00, 2019), которые и выбраны в качестве прототипов.
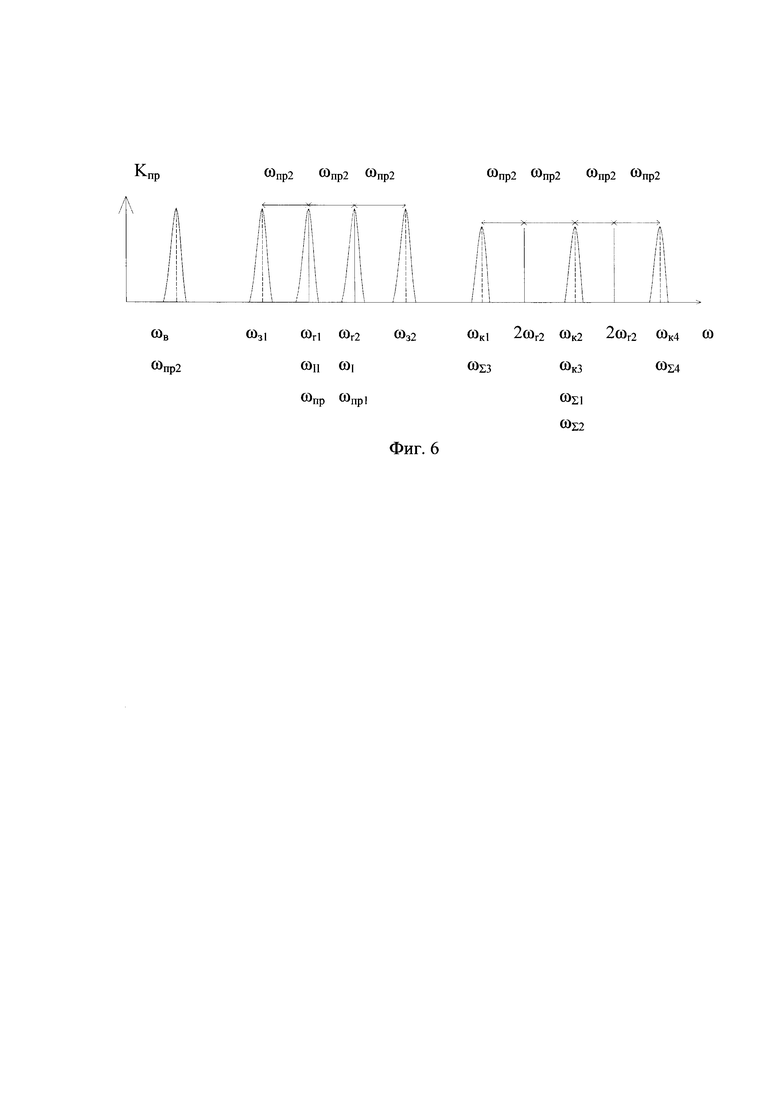
Модем 21 и пункт контроля 23, реализующие известный способ, содержат приемники, построенные по супергетеродинной схеме. В них одно и то же значение второй промежуточной частоты ωпр2 может быть получено в результате приема сигналов на частотах ωI, ωII, ωз1, ωз2, т.е.


Следовательно, если частоты настройки ωI и ωII принять за основные каналы приема, то наряду с ними будут иметь место зеркальные каналы приема, частоты ωз1, ωз2 которых отличаются от частот ωI и ωII на 2ωпр2 и расположены симметрично (зеркально) относительно частот ωr1 и ωr2 первого и второго гетеродинов (фиг. 6). Преобразование по зеркальным каналам приема происходит с тем же коэффициентом преобразования kup, что и по основным каналам. Поэтому они наиболее существенно влияют на избирательность и помехоустойчивость приемников.
Кроме зеркальных существуют и другие дополнительные (комбинационные) каналы приема. В общем виде любой комбинационный канал приема имеет место при выполнении следующих условий:


где ωki, ωkj - частоты -го и j-го комбинационных каналов приема;
m, n, i, j - целые положительные числа.
Наиболее вредными комбинационными каналами приема являются каналы, образующиеся при взаимодействии первой гармоники частоты сигналов с гармониками частот гетеродинов малого порядка (второй, третьей), так как чувствительность приемников по этим каналам близка к чувствительности основных каналов. Так, четырем комбинационным каналам при m=1 и m=2 соответствуют частоты:


где 2ωr1, 2ωr2 - вторые гармоники частот первого и второго гетеродинов.
Наличие ложных сигналов (помех), принимаемых по дополнительным каналам, приводит к снижению помехоустойчивости и достоверности обмена дискретной информацией между пунктом контроля и модемом.
Технической задачей изобретения является повышение помехоустойчивости и достоверности обмена дискретной информацией между пунктом контроля и модемом путем подавления ложных сигналов (помех), принимаемых по дополнительным каналам.
Поставленная задача решается тем, что способ дистанционного контроля состояния конструкций, заключающийся, в соответствии с ближайшим аналогом, в том, что на пункте контроля регистрируют сигналы с блоков измерения, установленных в местах диагностирования конструкции, сравнивают их с заранее зафиксированными значениями и по отклонению поступивших сигналов от заранее зафиксированных судят о наличии изменений контролируемых параметров, при этом изготавливают элемент конструкции из того же материала, что и вся конструкция, размещают на нем блоки измерения, проводят метрологическую аттестацию элемента с размещенными на нем блоками измерения путем установления зависимостей между сигналами с блоков измерения и калиброванными внешними воздействиями, регистрируют эти зависимости на пункте контроля и используют их в качестве заранее зафиксированных сигналов, врезают элемент с установленными на нем блоками измерения в места диагностирования конструкции и по отклонению поступивших сигналов с блоков измерения от заранее зарегистрированных сигналов судят о состоянии конструкции, при этом блоки измерения и преобразователи выполняют в виде линий задержки на поверхностных акустических волнах, на контроллере последовательно формируют m гармонических колебаний на разных несущих частотах, облучают ими линии задержки, настроенные на m несущие частоты, на каждой линии задержки электромагнитное гармоническое колебание преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну в электромагнитный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревых преобразователей поверхностных акустических волн, которая отражает порядковый номер линии задержки и величину контролируемого параметра, сложный сигнал с фазовой манипуляцией излучают в эфир, принимают на контроллере, осуществляют синхронное детектирование, выделяют низкочастотное напряжение, соответствующее порядковому номеру линии задержки и фазовому сдвигу, соответствующему внешнему воздействию, и направляют его в микропроцессор с запоминающим устройством, в котором производят расчет и преобразование поступившей информации, при этом на пункте контроля формируют высокочастотное колебание на частоте ωв, манипулируют его по фазе модулирующим кодом M1(t), который является кодом запроса, образованный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты ωr1 первого гетеродина, выделяют напряжение первой промежуточной (суммарной) частоты, усиливают его по мощности, излучают в эфир на частоте ωI=ωпр1=ωв+ωr1, улавливают модемом, усиливают по мощности и преобразуют по частоте с использованием частоты ωr1 первого гетеродина, а затем перемножают напряжение второй промежуточной (разностной) частоты ωпр2 с напряжением второго гетеродина, выделяют сложный сигнал с фазовой манипуляции на частоте ωr1 первого гетеродина, осуществляют его синхронное детектирование с использованием напряжения первого гетеродина в качестве опорного напряжения, выделяют первое низкочастотное напряжение, пропорциональное модулирующему коду M1(t) и направляют его в контроллер для дальнейшей обработки, в модеме формируют высоко частотное колебание на чистоте ωв, манипулируют его по фазе модулирующим кодом M2(t), который содержит информацию о наличии изменений контролируемых параметров, образованный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты ωr2 второго гетеродина, выделяют напряжение промежуточной (разностной) частоты ωпр=ωr2-ωв, усиливают его по мощности, излучают в эфир на частоте ωII=ωпр, улавливают на пункте контроля, усиливают по мощности и преобразуют по частоте с использованием частоты ωr2 второго гетеродина, а затем перемножают напряжение второй промежуточной (разностной) частоты ωпр2 с напряжением первого гетеродина, выделяют сложный сигнал с фазовой манипуляцией на частоте ωr2 второго гетеродина, осуществляют его синхронное детектирование с использованием напряжения второго гетеродина в качестве опорного напряжения, выделяют второе низкочастотное напряжение, пропорциональное модулирующему коду M2(t), и направляют его в микропроцессор для дальнейшей обработки, причем частоты ωr1 и ωr2 гетеродинов разносят на значение второй промежуточной частоты ωпр=ωr2-ωr1, отличается от ближайшего аналога тем, что на пункте контроля при преобразовании принимаемого сигнала по частоте с использованием частоты ωr2 второго гетеродина выделяют напряжение второй суммарной частоты ωΣ2=ωII-ωr2, преобразуют его по частоте с использованием частоты ωr3 третьего гетеродина и выделяют напряжение второй промежуточной частоты ωпр2=ωΣ2-ωr3, в модеме при преобразовании принимаемого сигнала по частоте с использованием частоты ωr2 второго гетеродина выделяют напряжение первой суммарной частоты ωΣ1=ωr1+ωI, преобразуют его по частоте с использованием частоты ωr3 третьего гетеродина и выделяют напряжение второй промежуточной частоты ωпр2=ωΣ1-ωr3.
Поставленная задача решается тем, что устройство дистанционного контроля состояния конструкций, содержащее, в соответствии с ближайшим аналогом, пункт контроля, блоки измерения, размещенные в местах диагностирования конструкции, преобразователи, линию связи, контроллер, при этом блоки измерения размещены на метрологически аттестованном элементе конструкции, изготовленном из того же материала, что и вся конструкция, и врезанном в места диагностирования конструкции, элемент конструкции, с размещенными на нем блоками измерения, соединен с соответствующими преобразователями, связанными своими выходами с входом контроллера, подключенного к модему, который через линию связи своим выходом соединен с пунктом контроля, при этом контроллер снабжен считывателем, а каждый блок измерения и преобразователь выполнены в виде линии задержки на поверхностных акустических волнах, причем считыватель содержит последовательно включенные синхронизатор, синтезатор несущих частот, дуплексер, вход-выход которого связан с приемопередающей антенной, усилитель высокой частоты и фазовый детектор, второй вход которого соединен с выходом синтезатора несущих частот, а выход подключен к входу микропроцессора с запоминающим устройством, выход которого соединен с входом модема, каждая линия задержки содержит пьезокристалл, на поверхность которого нанесены входной и выходной встречно-штыревые преобразователи, входной и выходной поглотители, при этом входной встречно-штыревой преобразователь соединен с микрополосковой приемопередающей антенной, а выходной встречно-штыревой преобразователь соединен с согласованной нагрузкой, импеданс которой зависит от внешнего воздействия, при этом пункт контроля выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого соединен с микропроцессором, первого смесителя, второй вход которого соединен с первым выходом первого гетеродина, усилителя первой промежуточной (суммарной) частоты, первого усилителя мощности, дуплексера, вход-выход которого связан с приемопередающей антенной, второго усилителя мощности и второго смесителя, второй вход которого соединен с первым выходом второго гетеродина, последовательно включенных усилителя второй промежуточной (разностной) частоты, перемножителя, второй вход которого соединен со вторым выходом первого гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с вторым выходом второго гетеродина, а выход подключен к микропроцессору, модем выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого через формирователь модулирующего кода соединен с контроллером, второго смесителя, второй вход которого соединен со вторым выходом второго гетеродина, усилителя промежуточной (разностной) частоты, второго усилителя мощности, дуплексера, вход-выход которого связан с приемопередающей антенной, первого усилителя мощности и первого смесителя, второй вход которого соединен с первым выходом первого гетеродина, последовательно включенных усилителя второй промежуточной (разностной) частоты, перемножителя, второй вход которого соединен с первым выходом второго гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен со вторым выходом первого гетеродина, а выход подключен к контроллеру, частоты ωr1 и ωr2 гетеродинов разнесены на значения второй промежуточной частоты ωпр2=ωr2-ωr1, отличается от ближайшего аналога тем, что пункт контроля снабжен усилителем второй суммарной частоты ωΣ2=ωII+ωr2, третьим гетеродином и третьим смесителем, причем к выходу второго смесителя последовательно подключены усилитель второй суммарной частоты ωΣ2=ωII+ωr2 и третий смеситель, второй вход которого соединен с выходом третьего гетеродина, а выход подключен к входу усилителя второй промежуточной (разностной) частоты, модем снабжен усилителем первой суммарной частоты ωΣ1=ωI+ωr1, третьим гетеродином и третьим смесителем, причем к выходу первого смесителя последовательно подключены усилитель первой суммарной частоты ωΣ1=ωI+ωr1, и третий смеситель, второй вход которого соединен с выходом третьего гетеродина, а выход подключен к входу усилителя второй промежуточной (разностной) частоты.
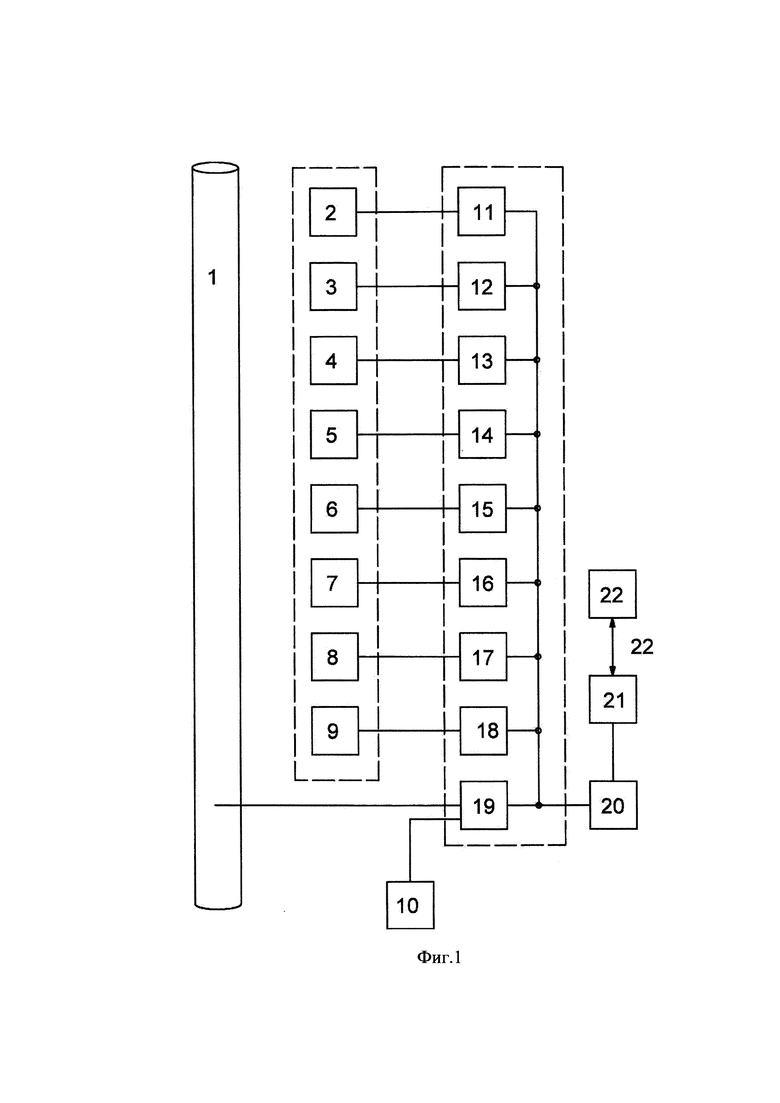
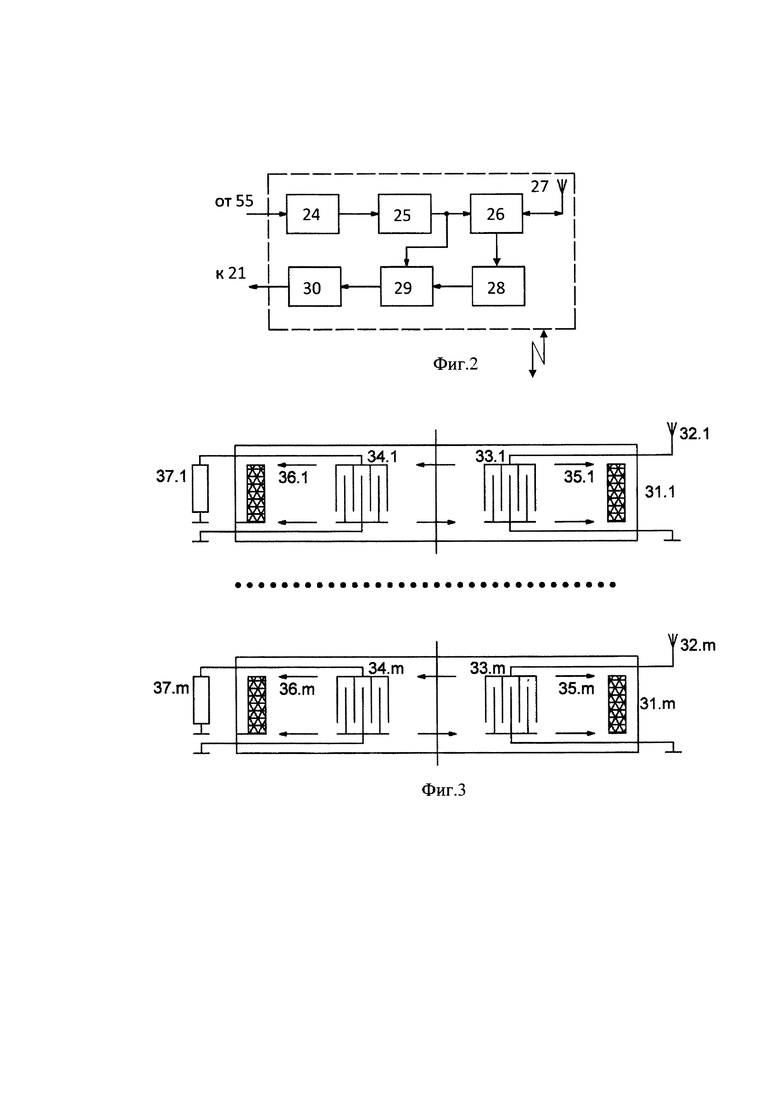
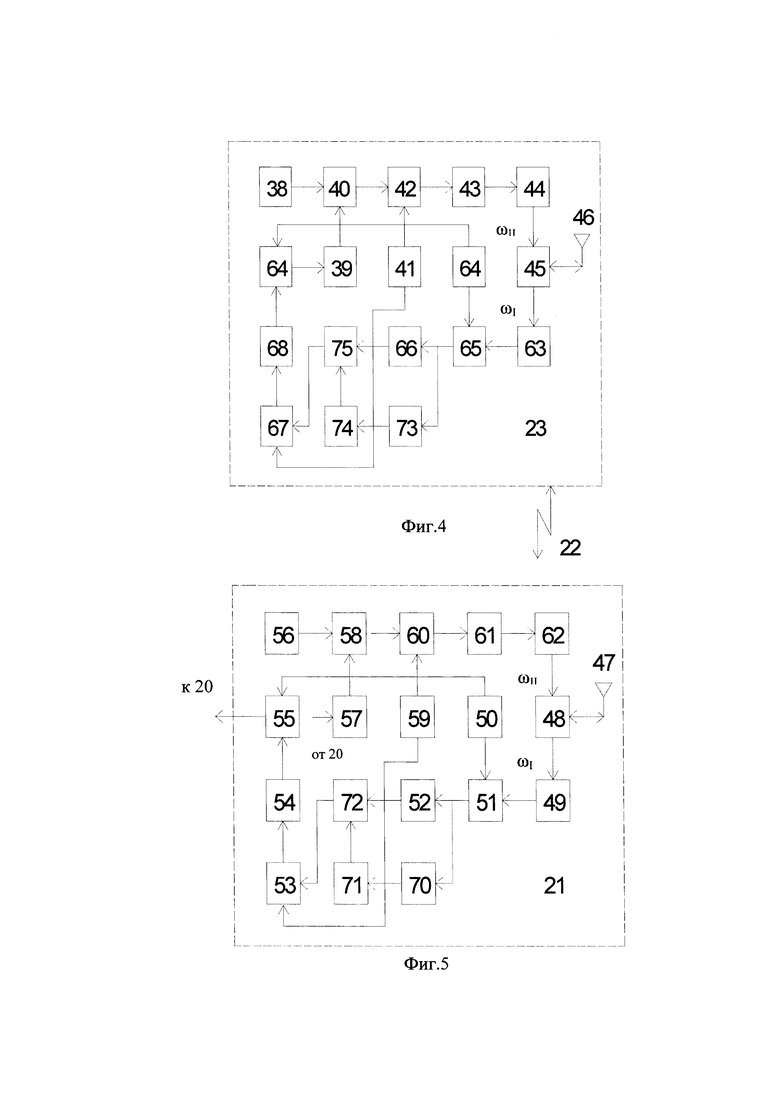
Структурная схема устройства, реализующего предлагаемый способ дистанционного контроля и диагностики состояния конструкций и инженерных сооружений, представлена на фиг. 1. Структурная схема контроллера 20 изображена на фиг. 2. Функциональные схемы блоков измерения и преобразователей на основе линий задержки показаны на фиг. 3. Структурные схемы пункта контроля 23 и модема 21 представлены на фиг. 4 и 5 соответственно. Частотная диаграмма показана на фиг. 6.
Устройство состоит из элемента 1 конструкции, изготовленного из того же материала, что и контролируемый участок конструкции, на котором расположены блоки измерения:
- деформации 2, механического напряжения 3, вибрации 4, давления 5, расхода 6, температуры 7 транспортируемого продукта, температуры 8 грунта, электрического тока 9, электрического потенциала 10 с электродом сравнения.
Выходы блоков 2-9 и 10 измерения соединены с входами соответствующих преобразователей 11-19, выходы которых, в свою очередь, соединены с входом контроллера 20. Выход контроллера 20 подключен к модему 21, который своим выходом соединен через линию связи 22 с входом удаленного пункта 23 контроля.
Контроллер 20 содержит последовательно включенные синхронизатор 24, соединенный с выходом фазового детектора 55, синтезатор 25 несущих частот, дуплексер 26, вход-выход которого связан с приемопередающей антенной 27, усилитель 28 высокой частоты, фазовый детектор 29, второй вход которого соединен с выходом синтезатора 25 несущей частоты, и микропроцессор 30 с запоминающим устройством, выход которого подключен к входу модема 21. Все блоки, кроме микропроцессора 30 с запоминающим устройством, образуют считыватель.
Каждый блок измерения и преобразователь выполнен в виде линии задержки на поверхностных акустических волнах (ПАВ) и содержит пьезокристалл 31.j, на поверхности которого нанесены входной 33.j и выходной 34.j встречно-штыревые преобразователи (ВШП), входной 35.j и выходной 36.j поглотители. При этом входной ВШП 33.j соединен с микрополосковой приемопередающей антенной 32j, а выходной ВШП 34.j соединен с согласованной нагрузкой 37.j, импеданс которой зависит от внешнего воздействия (деформации, механического напряжения, вибрации, давления, расхода, температуры, электрического тока) (j=1, 2, …, m).
Пункт контроля 23 содержит последовательно включенные задающей генератор 38, фазовый манипулятор 40, второй вход которого соединен с микропроцессором 39, первый смеситель 42, второй вход которого соединен с первым выходом первого гетеродина 41, усилитель 43 первой промежуточной (суммарной) частоты, первый усилитель частоты 44 мощности, дуплексер 45, вход-выход которого связан с приемопередающей антенной 46, второй усилитель 63 мощности, второй смеситель 65, второй вход которого соединен с первым выходом второго гетеродина 64, усилитель 73 второй суммарной частоты ωΣ2=ωII+ωr2, третий смеситель 75, второй вход которого соединен с выходом третьего гетеродина 74, усилитель 66 второй промежуточный (разностной) частоты, перемножитель 67, второй вход которого соединен с вторым выходом первого гетеродина 41, полосовой фильтр 68 и фазовый детектор 69, второй вход которого соединен с вторым выходом второго гетеродина 64, а выход подключен к микропроцессору 39.
Модем 21 содержит последовательно включенные задающий генератор 56, фазовый манипулятор 58, второй вход которого через формирователь модулирующего кода соединен с выходом контроллера 20, второй смеситель 60, второй вход которого соединен со вторым выходом второго гетеродина 59, усилитель 61 промежуточной (разностной) частоты, второй усилитель 62 мощности, дуплексер 48, вход-выход которого связан с приемопередающей антенной 47, первый усилитель 49 мощности, первый смеситель 51, второй вход которого соединен с первым выходом первого гетеродина 50, усилитель 70 первой суммарной частоты, третий смеситель 72, второй вход которого соединен с выходом третьего гетеродина 71, усилитель 52 второй промежуточной (разностной) частоты, перемножитель 53, второй вход которого соединен с первым выходом второго гетеродина 59, полосовой фильтр 54 и фазовой детектор 55, второй вход которого соединен со вторым выходом первого гетеродина 50, а выход подключен к контроллеру 20.
Предлагаемый способ осуществляется описанным устройством следующим образом (на примере трубопровода системы жизнеобеспечения сооружения специальных объектов).
В процессе эксплуатации сооружений происходит изменение технологических параметров трубопроводов системы жизнеобеспечения специальных объектов, обусловленное старением и дефектами конструкции. Поскольку процесс деформации трубопровода очень медленный и только в экстренных ситуациях требуется непрерывный поток информации, алгоритм работы устройства позволяет задавать интервалы опроса блоков измерения от десятков секунд до 1 месяца. В большинстве случаев для мониторинга трубопровода достаточно 1-2 измерений в сутки. При этом в качестве блоков измерений и преобразователей используются линии задержки на ПАВ, основной особенностью которых являются малые габариты и отсутствие источников питания (батарей, аккумуляторов). Каждая линия задержки настроена на определенную частоту, которая зависит от количества электродов ВШП и расстояния между ними.
На пункте 23 контроля задающий генератор 38 формирует высокочастотное колебание:

где Vв1, wв, ϕв1, Тв1 - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания,
которое поступает на первый вход фазового манипулятора 40, на второй вход которого подается модулирующий вход М1(t) с выхода микропроцессора 39. В качестве модулирующего кода M1(t) является код, соответствующий заданному измерительному патрубку трубопровода. На выходе фазового манипулятора 40 образуется сложный сигнал с фазовой манипуляцией (ФМН)

где ϕкв(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t), причем ϕкв(t)=const при кτэ≤t≤(к+1)τэ и может изменяться скачком при t=кτэ, т.е. на границах между элементарными посылками (к=1, 2, …, N); τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тв1(Тв1=τэ × N), который поступает на первый вход первого смесителя 42.
На второй вход последнего подается напряжение первого гетеродина 41

На выходе смесителя 42 образуются напряжения комбинационных частот. Усилителем 43 выделяется напряжение промежуточной (суммарной) частоты.

где 
wпр1=wв+wr1 - первая промежуточная (суммарная) частота;
ϕпр1=ϕв1+ϕr1.
Это напряжение после усиления в усилителе 44 мощности излучается приемопередающей антенной 46 в эфир на частоте wI=wпрl, улавливается приемопередающей антенной 47 модема 21 и через дуплексер 48 и усилитель 49 мощности поступает на первый вход первого смесителя 51, на второй вход которого подается напряжение Ur1(t) первого гетеродина 50. На выходе первого смесителя 51 образуются напряжения комбинационных частот.
Усилителем 70 выделяется напряжение первой суммарной частоты

где 
wΣ1=wr1+wI - первая (суммарная) частота;
ϕΣ1=ϕr1+ϕпр1,
которое поступает на первый вход третьего смесителя 72, на второй вход которого подается напряжение Ur3(t) третьего гетеродина 71

На выходе третьего смесителя 72 образуются напряжение комбинационных частот. Усилителем 52 выделяется напряжение второй промежуточной (разностной) частоты

где 
wпр2=wΣ1-wr3 _ вторая промежуточная (разностная) частота;
ϕпp2=ϕΣ1-ϕr3.
которое поступает на первой вход перемножителя 53. На второй вход перемножителя 53 подается напряжение второго гетеродина 59

При этом частоты wr1 и wr2 гетеродинов разнесены на значения второй промежуточной частоты (фиг. 6)

На выходе перемножителя 53 образуется напряжение

где 
которое выделяется полосовым фильтром 54 и поступает на первый (информационный) вход фазового детектора 55. На второй (опорный) вход фазового детектора 55 подается напряжение Ur1(t) со второго выхода первого гетеродина 50. В результате синхронного детектирования на выходе фазового детектора 55 образуется низкочастотное напряжение

где 
пропорциональное модулирующему коду M1(t).
Это напряжение поступает на вход контролера 20 (синхронизатора 24) и переводит его из ждущего режима в режим измерения.
При этом синхронизатор 24 включает синтезатор 25 несущих частот, который последовательно формирует гармонические колебания:




которые через дуплексер 26 последовательно во времени поступают в приемопередающую антенну 23 и излучаются ею в эфир, обеспечивая облучение соответствующих линий задержки на ПАВ.
Энергия высокочастотного электромагнитного колебания, принимаемого микрополосковой приемопередающей антенной 32.j, поступает на электроды входного ВШП 33.j, вызывая механическое гармоническое колебание в пьезоэлектрической подложке линии задержки за счет явления обратного пьезоэффекта. Механические колебания порождают поверхностную акустическую волну (ПАВ), которая распространяется как в направлении выходного ВШП 34.j, так и в направлении входного поглотителя 35.j. Механические колебания приводят к изменению разности потенциалов между электродами ВШП 34.j (явление прямого пьезоэффекта), что вызывает появление высокочастотного тока, протекающего через цепь нагрузки 37.j. Отраженная от ВШП 34.j в сторону выходного поглотителя 36.j и в сторону ВШП 33.j ПАВ, ослабленная по амплитуде за счет вносимых звукопроводом линии задержки потерь, приводит к изменению разности потенциалов между электродами ВШП 33.j, вызывая в нагрузке (микрополосковой приемопередающей антенне 32.j) высокочастотный ток (j=1, 2, …, m).




где ϕkj(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с внутренней структурой ВШП, отражающей порядковый номер j линии задержки;
Δϕj - фазовый сдвиг, соответствующий внешним воздействиям (деформации, механическое напряжение, вибрации, давление и т.п.), под влиянием которых изменяется импеданс нагрузки 37.j и коэффициент отражения.
Поглотители 35.j и 36.j обеспечивают режим бегущих акустических волн.
Сложные ФМн-сигналы Ucj(t) (j=1,2, …, m) последовательно принимаются приемопередающей антенной 27 контроллера 20 и через дуплексер 26 и усилитель 28 высокой частоты поступают на первый вход фазового детектора 29, на второй вход которого подаются гармонические колебания Uj(t) с выхода синтезатора 25 несущих частот в качестве опорных напряжений. В результате синхронного детектирования на выходе фазового детектора 29 последовательно выделяются низкочастотные напряжения

где 
пропорциональные порядковому номеру линии задержки и контролируемому параметру (деформации, механическому напряжению, вибрации, давлению и т.п).
Опрос и контроль линий задержки, характеризующих расход, температуру транспортируемого продукта, температуру грунта, величину электрического тока и электрического потенциала производится аналогичным образом. Низкочастотные напряжения с выхода фазового детектора 29 последовательно поступают в микропроцессор 30 с запоминающим устройством, который производит расчет и преобразование фазовых сдвигов Δϕj в цифровой вид. Результат вычислений последовательно подается на вход формирователя 57 модулирующего кода. Последней формирует модулирующий код M2(t), который поступает на второй вход фазового манипулятора 58. На первый вход фазового манипулятора 58 с выхода задающего генератора 56 подается высокочастотное колебание

На выходе фазового манипулятора 58 образуется сложный сигнал с фазовой манипуляцией (ФМН)

который поступает на первый вход второго смесителя 60, на второй вход которого подается напряжение Ur2(t) второго гетеродина 59.
На выходе смесителя 60 образуется напряжение комбинационных частот. Усилителем 61 выделяется напряжение промежуточной (разностной) частоты.
На выходе смесителя 60 образуется напряжение комбинационных частот. Усилителем 61 выделяется напряжение промежуточной (разностной) частоты

где 
wпр=wr2-wв - вторая промежуточная (разностная) частота;
ϕпр=ϕr2-ϕв3.
Это напряжение после усиления в усилителе 62 мощности через дуплексер 48 поступает в приемопередающую антенну 47, излучается ею в эфир на частоте wII=wup, улавливается приемопередающей антенной 46 пункта контроля и через дуплексер 45 и усилитель 63 мощности поступает на первый вход второго смесителя 65, на второй вход которого подается напряжение Ur2(t) второго гетеродина 64. На выходе смесителя 65 образуются напряжения комбинационных частот.
Усилителем 73 выделяется напряжение второй суммарной частоты

где 
wΣ2=wII+wr2 - вторая суммарная частота;
ϕΣ2=ϕпр2+ϕr2,
которое поступает на первый вход третьего смесителя 75, на второй вход которого подается напряжение третьего гетеродина 74

На выходе третьего смесителя 75 образуются напряжение комбинационных частот. Усилителем 66 выделяется напряжение второй промежуточной (разностной) частоты

где 
wпр2=wΣ2-wr3 - вторая промежуточная (разностная) частота;
ϕпр3=ϕΣ3-ϕr3,
которое поступает на первый вход перемножителя 67, на второй вход которого подается напряжение Ur1(t) первого гетеродина 41. На входе перемножителя 67 образуется напряжение

где 
wr2=wпр2+wr1;
ϕr2=ϕпр3+ϕr1,
которое выделяется полосовым фильтром 68 и поступает на первый (информационный) вход фазового детектора 69. На второй (опорный) вход фазового детектора 69 подается напряжение Ur2(t) второго гетеродина 64. В результате синхронного детектирования на выходе фазового детектора 69 образуется низкочастотное напряжение

где 
пропорциональное модулирующему коду M2(t). Это напряжение поступает в микропроцессор 39, где сравнивается с данными, полученными при метрологической аттестации, и проводится анализ технического состояния трубопровода системы жизнеобеспечения специальных объектов.
Описанная выше работа устройства соответствует случаю приема полезных ФМН сигналов по основным каналам на частотах ωI и ωII. При этом частота настройки ωн усилителей 70 и 73 первой ωΣI и второй ωΣ2 суммарных частот выбирается следующим образом: ωн=ωΣI=ωr1+ωI=ωΣ2=ωII+ωr2.
Если ложный сигнал(помеха) поступает по первому зеркальному каналу на частоте ωз1wз1

то образуется напряжение третьей суммарной частоты

которое не попадает в полосу пропускания усилителя 70 первой промежуточной частоты

Поэтому ложный сигнал (помеха), поступающий по первому зеркальному каналу на частоте ωз1, подавляется.
Если ложный сигнал (помеха) поступает по второму зеркальному каналу на частоте ωз2,

то образуется напряжение четвертой суммарной частоты wΣ4=wr2+wз2, которое не попадает в пользу пропускания усилителя 73 второй суммарной частоты

поэтому ложный сигнал (помеха), поступающий по второму зеркальному каналу на ωз2, подавляется.
По аналогичной причине подавляются и ложные сигналы (помехи), поступающие по другим дополнительным каналам.
При метрологической аттестации устройства определение статических характеристик линий задержки и всего устройства в целом проводится по ГОСТ 8.508-84, по которому статические характеристики определяются с заданными уровнями точности и достоверности в виде полиномов от задаваемых внешних воздействий.
Метрологическая аттестация патрубка осуществляется до его врезки в систему трубопровода.
Патрубок с установленными на нем датчиками, который после аттестации становится многоканальным измерительным устройством, устанавливают на потенциально-опасном участке системы, предварительно определенном проектом, и регистрируют поступающие сигналы, которые сравнивают с начальными, полученными при аттестации, и по статическим характеристикам, установив отклонение, оценивают состояние эксплуатационных характеристик участка трубопровода системы жизнеобеспечения специальных объектов.
Предлагаемые способ и устройство обеспечивают повышение эффективности дистанционного контроля состояния конструкции, например, потенциально-опасных участков систем жизнеобеспечения объектов, в течение всего периода их эксплуатации. Это достигается за счет снижения энергопотребления и повышения надежности датчиков, которые являются одним из основных элементов устройства, реализующего предлагаемый способ.
Основной особенностью датчиков в виде линий задержки на ПАВ являются малые габариты и отсутствие источников питания (батарей, аккумуляторов).
Предлагаемые способ и устройство обеспечивают повышение помехоустойчивости и достоверности обмена дискретной информацией между пунктом контроля и модемом. Это достигается использованием двух частот ωI и ωII и сложных сигналов с фазовой манипуляцией.
Указанные сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность сложных ФМН сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМН сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМН сигнала отнюдь не мала, она просто равномерно распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМН сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМН сигналов априорно неизвестной структуры с целью повышения чувствительности приемников.
Сложные ФМН-сигналы открывают новые возможности в технике передачи дискретных сообщений и их защиты от несанкционированного доступа. Указанные сигналы позволяют применять новый вид селекций -структурную селекцию. Это значит, что появляется возможность выделять сложные ФМН сигналы среди других сигналов и помех, действующих в одной и той же полосе частот и в одни и те же промежутки времени. Данная возможность реализуется сверткой спектра сложных ФМН сигналов.
Таким образом, предлагаемые способ и устройство по сравнению с прототипами и другими техническими решениями аналогичного назначения обеспечивают повышение помехоустойчивости и достоверности обмена дискретной информации между пунктом контроля и модемом. Это достигается за счет подавления ложных сигналов (помех), принимаемых по дополнительным каналам. При этом для подавления ложных сигналов (помех), принимаемых по дополнительным каналам, используется двойное преобразование частоты принимаемых сигналов. При первом преобразовании частоты ωI и ωII принимаемых сигналов преобразуются «вверх» с использованием частот ωr1 и ωr2 первого и второго гетеродинов и выделяются напряжение первой wΣ1=wr1+wI и второй wΣ2=wII+wr2 суммарных частот.
При втором преобразовании частоты wΣ1 и wΣ2 сформированных напряжений преобразуются «вниз» с использованием частоты ωr3 третьего гетеродина и выделением напряжений второй промежуточной частоты:

| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного контроля за транспортировкой высокотехнологичных строительных модулей | 2018 |
|
RU2699451C1 |
| Система дистанционного контроля поставки материальных и технических ресурсов для восстановления объектов инфраструктуры | 2020 |
|
RU2734064C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2016 |
|
RU2628986C1 |
| Система автоматизированного управления строительным комплексом | 2018 |
|
RU2696064C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 2007 |
|
RU2350998C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2714845C1 |
| Автоматизированная система управления восстановлением объектов инфраструктуры | 2019 |
|
RU2721663C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2619094C1 |
| СПОСОБ КОНТРОЛЯ И РЕГИСТРАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2625212C1 |
| СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ И ДИСПЕТЧЕРИЗАЦИИ МОБИЛЬНЫХ БРИГАД СКОРОЙ ПОМОЩИ | 2019 |
|
RU2722518C1 |
Предлагаемые способ и устройство относятся к контрольно-измерительной технике и могут быть использованы для непрерывного неразрушающего контроля, оценки и прогнозирования технического состояния конструкций и инженерных сооружений специальных объектов, например потенциально-опасных участков трубопроводов систем жизнеобеспечения специальных объектов, в течение всего периода их эксплуатации. Устройство, реализующее предлагаемый способ, содержит элемент 1 конструкции, блоки измерения деформации 2, механического напряжения 3, вибрации 4, давления 5, расхода 6, температуры 7 транспортируемого продукта, температуры 8 грунта, электрического тока 9, электрического потенциала 10 с электродом сравнения, преобразователи 11-19, контроллер 20, модем 21, линию связи 22 и пункт 23 контроля. Контроллер 20 содержит синхронизатор 24, синтезатор 25 несущих частот, дуплексер 26, приемопередающую антенну 27, усилитель 28 высокой частоты, фазовый детектор 29, микропроцессор 30. Каждый блок измерения и преобразователь содержит пьезокристалл 31.j, приемопередающую антенну 32.j, входной 33j и выходной 34.j встречно-штыревые преобразователи (ВШП), входной 35.j и выходной 36.j поглотители, согласованную нагрузку 37.j (j=1, 2, …, m). Пункт контроля 23 содержит задающий генератор 38, микропроцессор 39, фазовый манипулятор 40, первый гетеродин 41, первый смеситель 42, усилитель 43 первой промежуточной частоты, первый усилитель 44 мощности, дуплексер 45, приемопередающую антенну 46, второй усилитель 63 мощности, второй гетеродин 64, второй смеситель 65, усилитель 66 второй промежуточной частоты, перемножитель 67, полосовой фильтр 68, фазовый детектор 69, усилитель 73 второй суммарной частоты, третий гетеродин 74 и третий смеситель 75. Модем содержит задающий генератор 56, формирователь 57 модулирующего кода, фазовый манипулятор 58, второй гетеродин 59, второй смеситель 60, усилитель 61 промежуточной частоты, второй усилитель 62 мощности, дуплексер 48, приемопередающую антенну 47, первый усилитель 49 мощности, первый гетеродин 50, первый смеситель 51, усилитель 52 второй промежуточной частоты, перемножитель 53, полосовой фильтр 54, фазовый детектор 55, усилитель 70 первой суммарной частоты, третий гетеродин 71 и третий смеситель 72. Техническим результатом при реализации заявленного решения выступает повышение помехоустойчивости и достоверности обмена дискретной информацией между пунктом контроля и модемом путем подавления ложных сигналов (помех), принимаемых по дополнительным каналам. 2 н.п. ф-лы, 6 ил.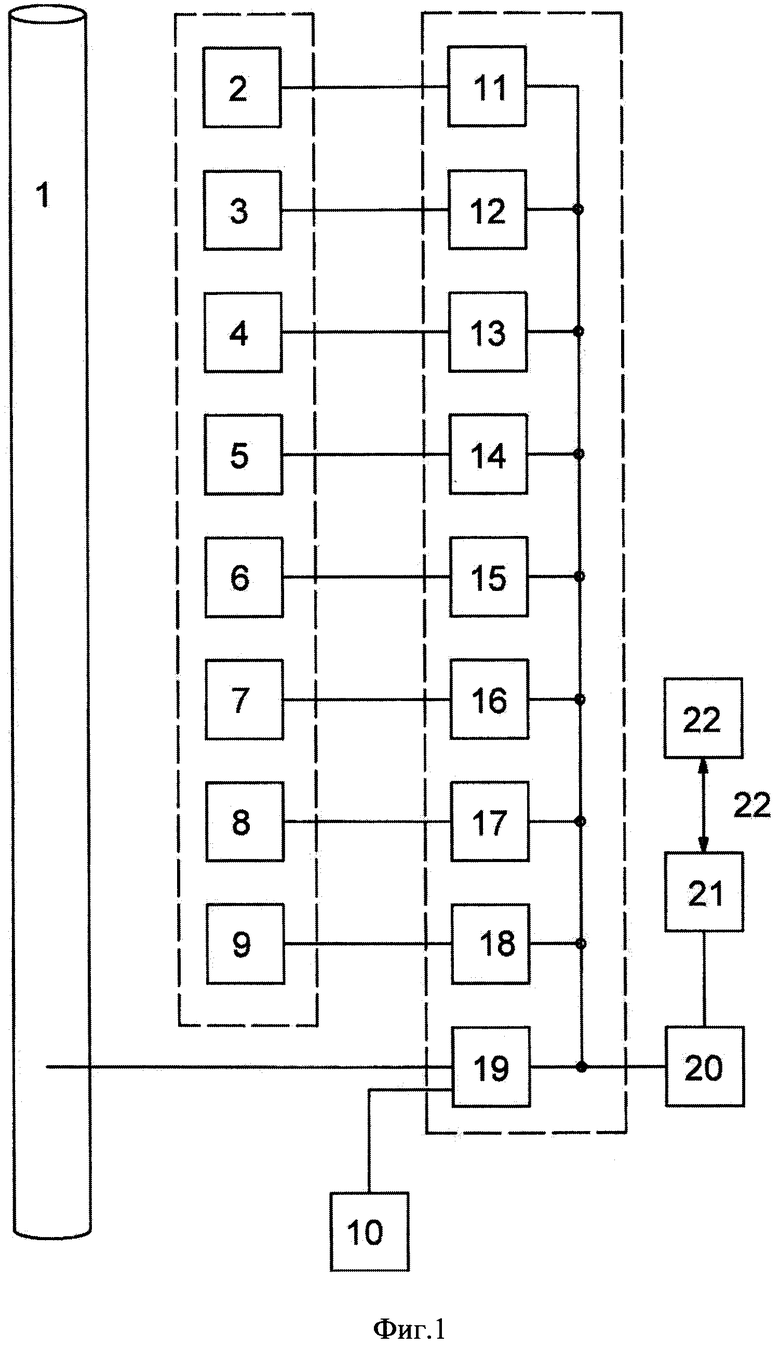
1. Способ дистанционного контроля состояния конструкций, заключающийся в том, что на пункте контроля регистрируют сигналы с блоков измерения, установленных в местах диагностирования конструкции, сравнивают их с заранее зафиксированными значениями и по отклонению поступивших сигналов от заранее зафиксированных судят о наличии изменений контролируемых параметров, при этом изготавливают элемент конструкции из того же материала, что и вся конструкция, размещают на нем блоки измерения, проводят метрологическую аттестацию элемента с размещенными на нем блоками измерения путем установления зависимостей между сигналами с блоков измерения и калиброванными внешними воздействиями, регистрируют эти зависимости на пункте контроля и используют их в качестве заранее зафиксированных сигналов, врезают элемент с установленными на нем блоками измерения в места диагностирования конструкции и по отклонению поступивших сигналов с блоков измерения от заранее зарегистрированных сигналов судят о состоянии конструкции, при этом блоки измерения и преобразователи выполняют в виде линий задержки на поверхностных акустических волнах, на контроллере последовательно формируют т гармонических колебаний на разных несущих частотах, облучают ими линии задержки, настроенные на т несущие частоты, на каждой линии задержки электромагнитное гармоническое колебание преобразуют в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют отраженную акустическую волну в электромагнитный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует структуре встречно-штыревых преобразователей поверхностных акустических волн, которая отражает порядковый номер линии задержки и величину контролируемого параметра, сложный сигнал с фазовой манипуляцией излучают в эфир, принимают на контроллере, осуществляют синхронное детектирование, выделяют низкочастотное напряжение, соответствующее порядковому номеру линии задержки и фазовому сдвигу, соответствующему внешнему воздействию, и направляют его в микропроцессор с запоминающим устройством, в котором производят расчет и преобразование поступившей информации, при этом на пункте контроля формируют высокочастотное колебание на частоте ωв, манипулируют его по фазе модулирующим кодом M1(t), который является кодом запроса, образованный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты ωr1 первого гетеродина, выделяют напряжение первой промежуточной (суммарной) частоты, усиливают его по мощности, излучают в эфир на частоте ω1=ωпр1=ωв+ωr1, улавливают модемом, усиливают по мощности и преобразуют по частоте с использованием частоты ωr1 первого гетеродина, а затем перемножают напряжение второй промежуточной (разностной) частоты ωпр2 с напряжением второго гетеродина, выделяют сложный сигнал с фазовой манипуляцией на частоте ωr1 первого гетеродина, осуществляют его синхронное детектирование с использованием напряжения первого гетеродина в качестве опорного напряжения, пропорционального модулирующему коду M1(t), и направляют его в контроллер для дальнейшей обработки, в модеме формируют высокочастотное колебание на частоте ωв, манипулируют его по фазе модулирующим кодом M2(t), который содержит информацию о наличии изменений контролируемых параметров, образованный сложный сигнал с фазовой манипуляцией преобразуют по частоте с использованием частоты ωr2, второго гетеродина, выделяют напряжение промежуточной (разностной) частоты ωпр=ωr2-ωв, усиливают его по мощности, излучают в эфир на частоте ωup=ω11, улавливают на пункте контроля, усиливают по мощности и преобразуют по частоте с использованием частоты ωr2 второго гетеродина, а затем перемножают напряжение второй промежуточной (разностной) частоты ωпр2 с напряжением первого гетеродина, выделяют сложный сигнал с фазовой манипуляцией на частоте ωr2 второго гетеродина, осуществляют его синхронное детектирование с использованием напряжения второго гетеродина в качестве опорного напряжения, выделяют второе низкочастотное напряжение, пропорциональное модулирующему коду M2(t), и направляют его в микропроцессор для дальнейшей обработки, причем частоты ωr1 и ωr2 гетеродинов разносят на значение второй промежуточной частоты ωпр2=ωr2-ωr1, отличающийся тем, что на пункте контроля при преобразовании принимаемого сигнала по частоте с использованием частоты ωr2 второго гетеродина выделяют напряжение второй суммарной частоты ωΣ2=ωII+ωr2, преобразуют его по частоте с использованием частоты ωr3 третьего гетеродина и выделяют напряжение второй промежуточной частоты ωпр2=ωΣ2-ωr3 в модеме при преобразовании принимаемого сигнала по частоте с использованием частоты ωr1 первого гетеродина, выделяют напряжение первой суммарной частоты ωΣ1=ωr1+ωI, преобразуют его по частоте с использованием частоты ωr3 третьего гетеродина и выделяют напряжение второй промежуточной частоты ωпр2=ωΣ1-ωr3.
2. Устройство дистанционного контроля состояния конструкций, содержащее пункт контроля, блоки измерения, размещенные в местах диагностирования конструкции, преобразователи, линию связи, контроллер, при этом блоки измерения размещены на метрологически аттестованном элементе конструкции, изготовленном из того же материала, что и вся конструкция, и врезанном в места диагностирования конструкции, элемент конструкции с размещенными на нем блоками измерения соединен с соответствующими преобразователями, связанными своими выходами с входом контроллера, подключенного к модему, который через линию связи своим выходом соединен с пунктом контроля, при этом контроллер снабжен считывателем, а каждый блок измерения и преобразователь выполнены в виде линии задержки на поверхностных акустических волнах, причем считыватель содержит последовательно включенные синхронизатор, синтезатор несущих частот, дуплексер, вход-выход которого связан с приемопередающей антенной, усилитель высокой частоты и фазовый детектор, второй вход которого соединен с выходом синтезатора несущих частот, а выход подключен к входу микропроцессора с запоминающим устройством, выход которого соединен с входом модема, каждая линия задержки содержит пьезокристалл, на поверхность которого нанесены входной и выходной встречно-штыревые преобразователи, входной и выходной поглотители, при этом входной встречно-штыревой преобразователь соединен с микрополосковой приемопередающей антенной, а выходной встречно-штыревой преобразователь соединен с согласованной нагрузкой, импеданс которой зависит от внешнего воздействия, при этом пункт контроля выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого соединен с выходом микропроцессора, первого смесителя, второй вход которого соединен с первым выходом первого гетеродина, усилителя первой промежуточной (суммарной) частоты, первого усилителя мощности, дуплексера, вход-выход которого связан с приемопередающей антенной, второго усилителя мощности, второго смесителя, второй вход которого соединен с первым выходом второго гетеродина, последовательно включенных усилителя второй промежуточной (разностной) частоты, перемножителя, второй вход которого соединен с вторым выходом первого гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен с вторым выходом второго гетеродина, а выход подключен к микропроцессору, модем выполнен в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого через формирователь модулирующего кода соединен с контроллером, второго смесителя, второй вход которого соединен со вторым выходом второго гетеродина, усилителя промежуточной (разностной) частоты, второго усилителя мощности, дуплексера, вход-выход которого связан с приемопередающей антенной, первого усилителя мощности и первого смесителя, второй вход которого соединен с первым выходом первого гетеродина, последовательных включенных усилителя второй промежуточной (разностной) частоты, перемножителя, второй вход которого соединен с первым выходом второго гетеродина, полосового фильтра и фазового детектора, второй вход которого соединен со вторым выходом первого гетеродина, а выход подключен к контроллеру, частоты ωr1 и ωr2 гетеродинов разнесены на значение второй промежуточной частоты ωпр2=ωr2-ωr1, отличающееся тем, что пункт контроля снабжен усилителем второй суммарной частоты ωΣ2=ωII+ωr2, третьим гетеродином и третьим смесителем, причем к выходу второго смесителя последовательно подключены усилитель второй суммарной частоты ωΣ2=ωII+ωr2 и третий смеситель, второй вход которого соединен с выходом третьего гетеродина, а выход подключен к входу усилителя второй промежуточной (разностной) частоты, модем снабжен усилителем первой суммарной частоты ωΣ1=ωI+ωr1, третьим гетеродином и третьим смесителем, причем к выходу первого смесителя последовательно подключены усилитель первой суммарной частоты ωΣ1=ωI+ωr1 и третий смеситель, второй вход которого соединен с выходом третьего гетеродина, а выход подключен к входу усилителя второй промежуточной (разностной) частоты.
| Способ дистанционного контроля и диагностики состояния конструкций и инженерных сооружений и устройство для его осуществления | 2018 |
|
RU2685578C1 |
| Способ автоматического дистанционного мониторинга накопления остаточных деформаций и колебаний тепло-влажностного режима элементов дорожных конструкций в реальных условиях эксплуатации | 2019 |
|
RU2710901C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ КОНСТРУКЦИЙ И ОСНОВАНИЙ ПРЕИМУЩЕСТВЕННО ИНЖЕНЕРНЫХ СООРУЖЕНИЙ | 2008 |
|
RU2365895C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ КОНСТРУКЦИЙ И ИНЖЕНЕРНО-СТРОИТЕЛЬНЫХ СООРУЖЕНИЙ | 2011 |
|
RU2473873C1 |
| CN 103512713 A, 15.01.2014 | |||
| US 5894092 A, 13.04.1999. | |||

