Изобретение относится к лазерной технике, а именно к аппаратуре лазерной дальнометрии.
Известны лазерные измерители расстояний, содержащие приемный канал, включающий объектив и фотоприемное устройство, и параллельный ему передающий канал, включающий оптическую систему и лазерный излучатель [1].
Подобные устройства характеризуются наличием аппаратной функции (геометрического фактора) [2], характеризующей неполное перекрытие полей зрения приемного и передающего каналов. На малых дальностях эти поля не перекрываются, в результате чего образуется теневая зона, в пределах которой измерения дальности невозможны.
Наиболее близким по технической сущности к предлагаемому является техническое решение, направленное на сокращение теневой зоны [3]. Этот лазерный измеритель расстояний содержит передающий канал для формирования пучка зондирующего излучения и направления его на цель, параллельный ему приемный канал для приема отраженного целью сигнала, причем передающий канал включает лазерный излучатель и передающую оптическую систему, приемный канал включает фотоприемное устройство и приемный объектив, а поля зрения передающего и приемного каналов перекрываются на дальности R1, соответствующей протяженности теневой зоны, определяемой взаимным расположением передающего и приемного каналов. В этом измерителе расстояний база между передающим и приемным каналами сокращена, благодаря чему и обеспечивается укорочение теневой зоны.
Недостатком этого устройства является принципиальная невозможность сокращения теневой зоны до расстояний порядка нескольких сантиметров вследствие наличия элементов конструкции (оправы, бленды, светозащитные шторки и т.п), препятствующих дальнейшему сближению передающего и приемного каналов.
Задачей изобретения является уменьшение минимальной измеряемой дальности путем сокращения теневой зоны аппаратной функции.
Поставленная задача решается за счет того, что в известном лазерном измерителе расстояний, содержащем передающий канал для формирования пучка зондирующего излучения и направления его на цель, включающий лазерный излучатель и передающую оптическую систему, параллельный ему приемный канал для приема отраженного целью сигнала, включающий фотоприемное устройство и приемный объектив, введен световод, входное отверстие которого расположено рядом с выходным отверстием оптической системы передающего канала, а его выходное отверстие направлено на чувствительную площадку фотоприемного устройства приемного канала, причем входная оптическая ось световода направлена под таким углом к оптической оси передающего канала, чтобы энергия излучения, отраженного от целей, расположенных в диапазоне дальностей от R0 до R1, поступающая на чувствительную площадку фотоприемного устройства, соответствовала порогу срабатывания последнего,
где R0<R1 - заданная минимальная измеряемая дальность;
R1 - протяженность теневой зоны, образуемой в диапазоне дальностей, где поля зрения передающего и приемного каналов не перекрываются.
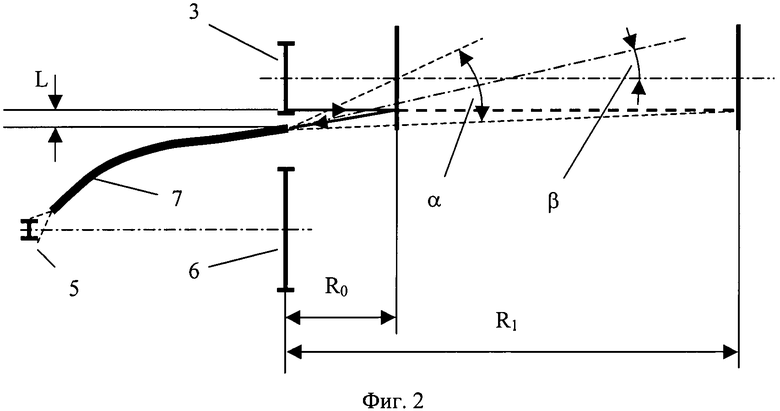
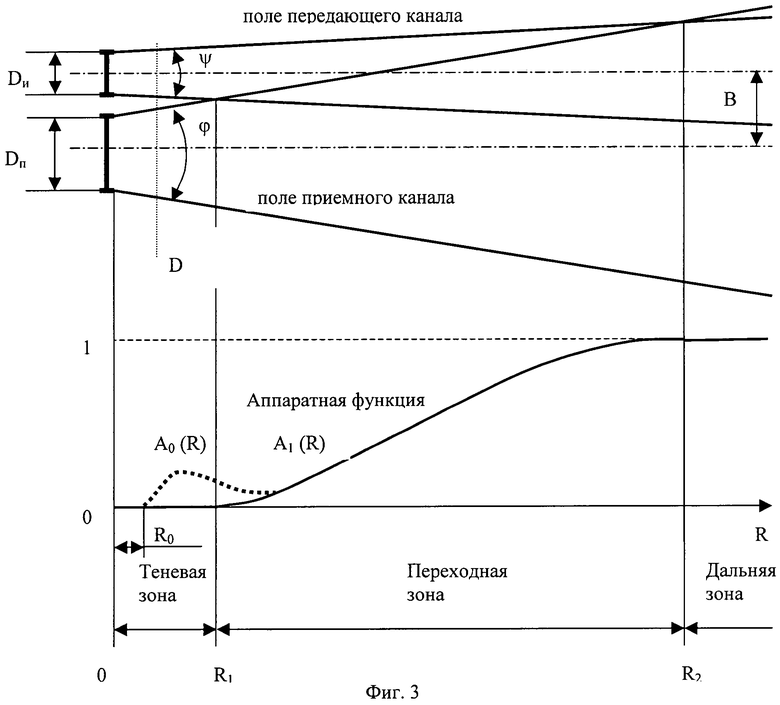
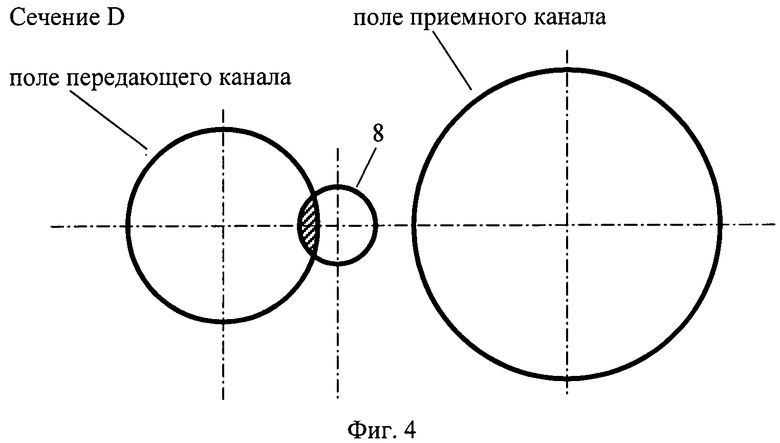
На фиг.1 представлена блок-схема лазерного измерителя расстояний. На фиг.2 - его функциональная схема. Фиг.3 поясняет характер аппаратной функции и ее теневой зоны. На фиг 4 показано пересечение полей зрения передающего, приемного и световодного каналов в сечении D картинной плоскости измерителя на расстоянии R0<R<R1.
Лазерный измеритель расстояний (фиг.1) содержит три оптических канала. Передающий канал 1 для формирования пучка зондирующего излучения включает лазерный излучатель 2 и передающую оптическую систему 3. Параллельный передающему приемный канал 4 для приема отраженного целью сигнала включает фотоприемное устройство 5 и приемный объектив 6. Третий оптический канал образован световодом 7, оптически связанным по выходу с фотоприемным устройством 5 и установленным так, чтобы на свой вход принимать излучение, отраженное от целей в заданном диапазоне дальностей.
На фиг.2 показана функциональная схема устройства. Входное отверстие световода 7 расположено рядом с выходным отверстием оптической системы 3 передающего канала, а его выходное отверстие направлено на чувствительную площадку фотоприемного устройства 5, причем входная оптическая ось световода направлена под таким углом β к оптической оси передающего канала, чтобы энергия излучения, отраженного от целей, расположенных в диапазоне дальностей от R0 до R1, поступающая на чувствительную площадку фотоприемного устройства, соответствовала порогу срабатывания последнего, где R0<R1 - заданная минимальная измеряемая дальность.
Устройство работает следующим образом.
При излучении зондирующего импульса с помощью лазерного излучателя 2 на выходе передающей оптической системы формируется расходящийся пучок излучения, образующий поле передающего канала (фиг.3). Отраженное целью излучение попадает в поле приемного канала и с помощью приемного объектива 6 фокусируется на чувствительной площадке фотоприемного устройства 5. Дальность до цели R определяют по известной зависимости [1] R=ct/2, где с - скорость света, t - время между моментом излучения зондирующего импульса и моментом срабатывания фотоприемного устройства от излучения, отраженного целью.
В дальней зоне при расстоянии до цели R>R2 поля излучающего и приемного каналов полностью перекрываются, обеспечивая попадание на фотоприемное устройство достаточной для его срабатывания энергии излучения, отраженного целью.
На малых расстояниях до цели поля излучающего и приемного каналов перекрываются не полностью, а в теневой зоне при R<R1 (фиг.3) вообще не перекрываются, что делает невозможным измерение при расстояниях до цели R<R1.
Световод 7 формирует дополнительное поле α приемного канала, перекрывающееся с полем передающего канала на дальностях R0<R<R1 (фиг.4), и соответственно формирует дополнительную аппаратную функцию A0(R), показанную на фиг.3 пунктиром.
Результирующая аппаратная функция A(R)=A0(R)+A1(R) предлагаемого устройства обеспечивает возможность измерения дальностей при расстояниях до цели R0<R, причем R0<R1. Введение световода позволяет сократить теневую зону и соответственно минимальную измеряемую дальность с 5-30 м до 0,05-0,2 м.
Таким образом предлагаемый лазерный измеритель расстояний обеспечивает решение поставленной задачи - уменьшение минимальной измеряемой дальности путем сокращения теневой зоны аппаратной функции.
Источники информации
1. Ермаков Б.А., Возницкий М.В. Получение и обработка информации в импульсных лазерных дальномерах // Оптический журнал №10 (1993), - с.15-32.
2. С.А.Даничкин. Границы действия геометрического фактора лидара. IV Всесоюзный симпозиум по лазерному зондированию атмосферы. Тезисы докладов. Томск, 1976, с.79-82.
3. Патент США №4737624 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ (ВАРИАНТЫ) | 2011 |
|
RU2473046C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР (ВАРИАНТЫ) | 2011 |
|
RU2475702C1 |
| ДАЛЬНОМЕРНОЕ УСТРОЙСТВО | 2018 |
|
RU2684445C1 |
| Лазерный дальномер | 2017 |
|
RU2655003C1 |
| ЛАЗЕРНЫЙ БИНОКЛЬ-ДАЛЬНОМЕР | 2010 |
|
RU2442959C1 |
| Импульсный лазерный дальномер | 2021 |
|
RU2756783C1 |
| Способ локационного измерения дальности | 2021 |
|
RU2766065C1 |
| Способ обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2742139C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2005 |
|
RU2307322C2 |
| Устройство обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2746089C1 |
Изобретение относится к лазерной технике, а именно к аппаратуре лазерной дальнометрии. В лазерный измеритель расстояний введен световод, входное отверстие которого расположено рядом с выходным отверстием оптической системы передающего канала, а его выходное отверстие направлено на чувствительную площадку фотоприемного устройства приемного канала. Входная оптическая ось световода направлена под таким углом к оптической оси передающего канала, чтобы энергия излучения, отраженного от целей, расположенных в диапазоне дальностей от R0 до R1, поступающая на чувствительную площадку фотоприемного устройства, соответствовала порогу срабатывания последнего, где R0<R1 - заданная минимальная измеряемая дальность; R1 - протяженность теневой зоны, образуемой в диапазоне дальностей, где поля зрения передающего и приемного каналов не перекрываются. Технический результат состоит в уменьшении минимальной измеряемой дальности путем сокращения теневой зоны аппаратной функции. 4 ил.
Лазерный измеритель расстояний, содержащий передающий канал для формирования пучка зондирующего излучения и направления его на цель, включающий лазерный излучатель и передающую оптическую систему, параллельный ему приемный канал для приема отраженного целью сигнала, включающий фотоприемное устройство и приемный объектив, отличающийся тем, что введен световод, входное отверстие которого расположено рядом с выходным отверстием оптической системы передающего канала, а его выходное отверстие направлено на чувствительную площадку фотоприемного устройства приемного канала, причем входная оптическая ось световода направлена под таким углом к оптической оси передающего канала, чтобы энергия излучения, отраженного от целей, расположенных в диапазоне дальностей от R0 до R1, поступающая на чувствительную площадку фотоприемного устройства, соответствовала порогу срабатывания последнего, где R0<R1 - заданная минимальная измеряемая дальность; R1 - протяженность теневой зоны, образуемой в диапазоне дальностей, где поля зрения передающего и приемного каналов не перекрываются.
| US 4737624 А, 12.04.1988 | |||
| US 2011001958 A1, 06.01.2011 | |||
| RU 2009112729 A, 20.10.2010 | |||
| JP 2005227219 A, 25.08.2005 | |||
| JP 10009813 A, 16.01.1998. |

