Изобретение относится к оптико-электронному приборостроению и может использоваться в обзорно поисковых оптико-электронных системах лазерной локации, использующих принцип отражения излучения от исследуемого объекта.
Известен способ обнаружения оптических приборов (ОП), реализованный в лазерном детекторе SLD400, фирма CILAS Франция [Газета "Сегодня", №196 за 11.09.97 г.]. Способ основан на облучении зоны предполагаемого нахождения оптического прибора лазерным излучением, приеме отраженного излучения, формировании видеосигнала, пропорционального интенсивности отраженного излучения, сравнении видеосигнала с априорно заданным порогом. Превышение видеосигналом заданного порога приравнивается в данном способе к факту появления в зоне облучения оптического прибора. Этот способ имеет существенные недостатки, особенно при обнаружении ОП на маскирующем фоне диффузно-отражающих объектов: стены домов, горы, лес, кусты, грунт (при обнаружении ОП с летательных аппаратов). Поскольку в этом случае общая площадь диффузного объекта, освещаемая лазерным лучом, существенно превышает апертуру ОП, уровень сигнала, отраженного от ОП, становится сравнимым с уровнем сигнала, отраженного от диффузного объекта. При установке порога на низком уровне увеличивается вероятность "ложного" срабатывания за счет сигнала от диффузного объекта, при установке порога на высоком уровне увеличивается вероятность пропуска сигнала от ОП. Кроме этого, в способе отсутствует селекция ОП от уголковых и катафотных отражателей, которые в городских условиях могут создавать естественный или искусственный фон, маскирующий ОП.
Известен также способ подсвета объектов лазерным излучением и определения положения лазерного излучения на цели, реализованный в лазерном маркере PEQ-IA [James International Defense Review., 1996, №2, Feb., p. 19-20], однако он имеет те же недостатки, что и предыдущий и, кроме этого, неработоспособен в дневных условиях.
Известен способ обнаружения оптико-электронных приборов (ОЭП), реализованный в лазерной системе обнаружения ОЭП [Патент России №2113717, 10.11.1996 г., G 01 S 17/06]. В этом способе осуществляются облучение лазерным излучением и обзор пространства в верхней полусфере, прием отраженного излучения, формирование видеосигнала, пропорционального интенсивности отраженного излучения, сравнение видеосигнала с априорно устанавливаемым порогом, формирование сигнала обнаружения при превышении видеосигнала над порогом, измерение дальности до ОЭП импульсным методом и угловых координат по угловому положению диаграммы направленности лазерного излучения. Этому способу свойственны те же недостатки, что и способу [Газета "Сегодня", №196 за 11.09.1997 г.].
Наиболее близким к заявляемому, выбранным за прототип, является способ обнаружения оптических и оптико-электронных приборов (патент РФ №2568336 от 01.11.2013, МПК G01S17/06), основанный на облучении зоны предполагаемого расположения оптических и оптико-электронных приборов лазерным поляризованным излучением, приеме и делении отраженного излучения на две ортогонально поляризованные составляющие в поляризационном делителе, разделении чувствительной площадки фотоприемного устройства на две равные зоны для раздельной регистрации первой и второй составляющих отраженного излучения, отражении первой составляющей от первого элемента поляризационного делителя и фокусировке ее в первой зоне на чувствительной площадке фотоприемного устройства, формировании сигнала, пропорционального отношению интенсивности отраженного излучения, имеющего плоскость поляризации, ортогональную плоскости поляризации облучающего излучения, к интенсивности излучения, имеющего плоскость поляризации, совпадающую с плоскостью поляризации облучающего излучения, отражении второй составляющей от второго элемента поляризационного делителя, компенсации ее оптического пути и фокусировке во второй зоне чувствительной площадки фотоприемного устройства, обнаружении в поле зрения системы оптических и оптико-электронных приборов, измерении координат обнаруженных целей, измерении дальности до них.
В известном способе используется двухканальная система построения изображений с раздельной регистрацией отраженного излучения зарегистрированных в различных состояниях поляризации на двухзонной чувствительной площадке фотоприемного устройства.
Фокусные расстояния, угловые поля и соответственно линейные поля каналов равны. Из-за небольших расстояний между каналами, которое определяется размером приемника, происходит виньетирование наклонных пучков на границе между двумя каналами и изображения накладываются друг на друга, что уменьшает угловые поля в каналах и затрудняют обработку результатов. При наложении изображений уровень сигнала, отраженного от ОП уменьшается, и становится сравнимым с уровнем сигнала, отраженного от диффузного объекта. При установке порога на низком уровне увеличивается вероятность "ложного" срабатывания за счет сигнала от диффузного объекта, при установке порога на высоком уровне увеличивается вероятность пропуска сигнала от ОП.
На фиг. 1 наглядно проиллюстрирована картина наложения изображений на границе между двумя каналами.
Задачей изобретения является создание способа обнаружения ОП с повышенными эксплуатационными характеристиками за счет построения в двухканальной системе качественной картины изображений без наложения на границе между каналами.
С помощью предлагаемого изобретения достигается технический результат, заключающейся в построении в двухканальной системе качественной картины изображений без наложения на границе между каналами, в повышении точности определения координат обнаруженных целей на границе между каналами, увеличении стабильности параметров, повышении эффективности обнаружения оптических и оптико-электронных приборов на границе между каналами, улучшении эксплуатационных характеристик.
Поставленная задача решается тем, что в известном способе обнаружения оптических и оптико-электронных приборов, основанном на облучении зоны предполагаемого расположения оптических и оптико-электронных приборов лазерным поляризованным излучением, приеме и делении отраженного излучения на две ортогонально поляризованные составляющие в поляризационном делителе, разделении чувствительной площадки фотоприемного устройства на две зоны для раздельной регистрации первой и второй составляющих отраженного излучения, отражении первой составляющей от первого элемента поляризационного делителя и фокусировке ее в первой зоне на чувствительной площадке фотоприемного устройства, формировании сигнала, пропорционального отношению интенсивности отраженного излучения, имеющего плоскость поляризации, ортогональную плоскости поляризации облучающего излучения, к интенсивности излучения, имеющего плоскость поляризации, совпадающую с плоскостью поляризации облучающего излучения, отражении второй составляющей от второго элемента поляризационного делителя, компенсации ее оптического пути и фокусировке во второй зоне чувствительной площадки фотоприемного устройства, обнаружении в поле зрения системы оптических и оптико-электронных приборов, измерении координат обнаруженных целей, измерении дальности до них, в отличие от прототипа, фокусные расстояния первой и второй составляющих разные, площадка фотоприемного устройства разделена на неравные зоны, произведена дополнительная фокусировка второй составляющей при компенсации оптического пути.
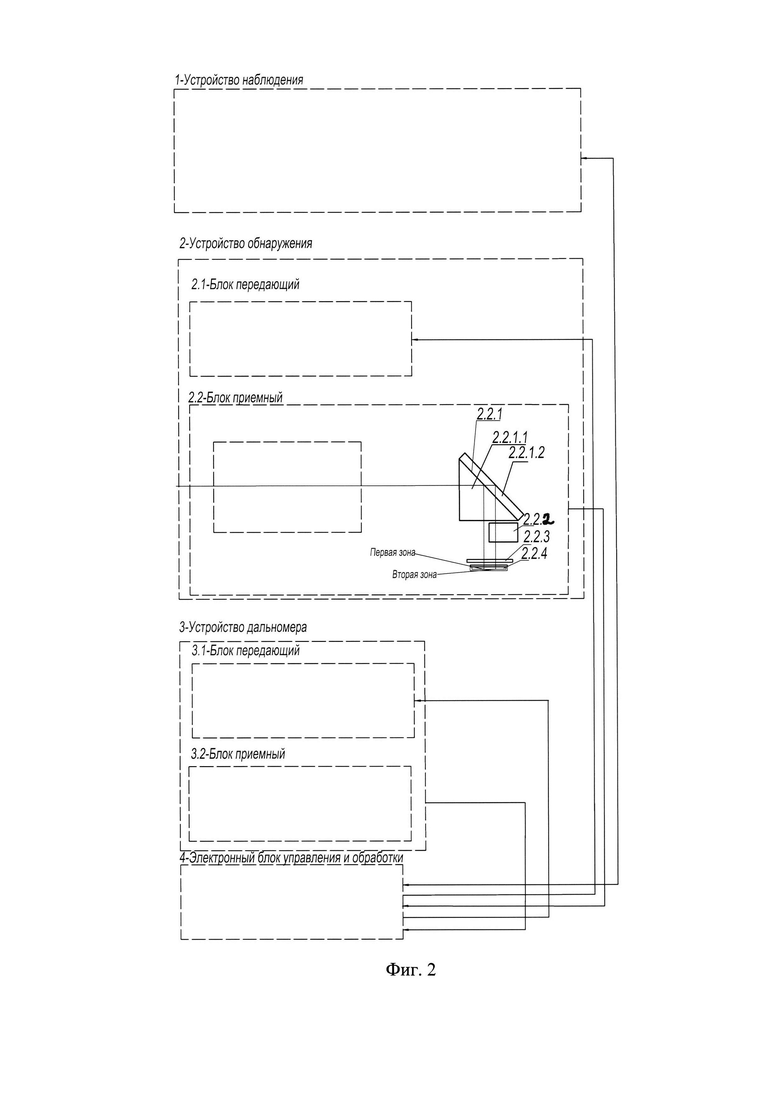
Рассмотрим обнаружение оптических и оптико-электронных приборов с помощью предлагаемого способа. На фиг. 2 показана блок-схема для реализации предложенного способа, где обозначено:
1 - устройство наблюдения;
2 - устройство обнаружения:
2.1 - блок передающий;
2.2 - блок приемный:
2.2.1 - поляризационный делитель:
2.2.1.1 - первый элемент поляризационного делителя;
2.2.1.2 - второй элемент поляризационного делителя;
2.2.2 - компенсатор;
2.2.3 - поляризатор;
2.2.4 - фотоприемное устройство;
3 - устройство дальномера:
3.1 - блок передающий;
3.2 - блок приемный;
4 - электронный блок управления и обработки.
Устройство обнаружения оптических и оптико-электронных приборов состоит из устройства наблюдения 1; устройства обнаружения 2; устройства дальномера 3 и электронного блока управления и обработки 4.
Устройство наблюдения 1 предназначено для визуального обзора окружающей местности.
Устройство обнаружения 2 состоит из блока передающего 2.1 и блока приемного 2.2.
Блок передающий 2.1 предназначен для облучения выбранного объема пространства и облучения оптических и оптико-электронных приборов.
Блок приемный 2.2 предназначен для получения изображений бликующих объектов в плоскости чувствительной площадки фотоприемного устройства. Блок приемный выполнен в виде двухканальной системы построения изображений с возможностью осуществлять раздельную регистрацию изображений с s- и р- поляризаций.
Поляризационный делитель 2.2.1 и компенсатор 2.2.2 используются для выделения объектов, бликующих под действием зондирующего излучения, из других объектов, наблюдаемых через устройство наблюдения. Выделение объектов, засвечиваемых зондирующим излучением, обусловлено преимущественным состоянием поляризации отраженного от этих объектов излучения, в отличие от преимущественно неполяризованного излучения, приходящего от других наблюдаемых объектов.
Поляризационный делитель 2.2.1 - двухэлементный и предназначен для оптического деления полей изображения на два канала с поляризацией полей во взаимно перпендикулярных направлениях.
Компенсатор 2.2.2 предназначен для совмещения плоскостей фокусировки излучения с разными составляющими поляризации, уменьшения фокусного расстояния во втором канале и уменьшении второй зоны чувствительной площадки фотоприемного устройства.
Поляризатор 2.2.3 устанавливается перед фотоприемным устройством 2.2.4 и предназначен для подавления помех.
Чувствительная площадка фотоприемного устройства 2.2.4 разделена на две неравные зоны для раздельной регистрации изображений с s- и р -поляризаций.
Устройство дальномера 3 предназначено для определения дальности до оптических и оптико-электронных приборов и состоит из блока передающего 3.1 и блока приемного 3.2.
Блок передающий 3.1 устройства дальномера предназначен для облучения обнаруженных целей.
Блок приемный 3.2 устройства дальномера предназначен для приема отраженного излучения от целей и определения дальности до обнаруженных целей.
Обнаружение ОП осуществляется следующим образом.
Посредством устройства наблюдения 1 осуществляется визуальный обзор окружающей местности. При осмотре местности определяется зона предполагаемого нахождения оптических и оптико-электронных приборов.
Обнаружение оптических и оптико-электронных объектов осуществляется путем лоцирования выбранного объема пространства лазерным плоско-поляризованным излучением. Лазерное излучение блока передающего 2.1 обнаружителя 2 формирует необходимую диаграмму направленности зондирующего лазера в пространстве объектов. Производят лоцирование выбранного объема пространства, где находится предполагаемый оптический и оптико-электронный прибор. Отраженное излучение от объектов принимается приемным блоком 2.2 обнаружителя 2 и делится его поляризационным делителем 2.2.1 на две ортогонально поляризованные составляющие, первая из составляющих из которых - s-поляризация отражается от первого элемента поляризационного делителя 2.2.1.1, проходит через поляризатор 2.2.3 и фокусируется в первой зоне чувствительной площадки фотоприемного устройства 2.2.4 в зоне s-поляризации, а вторая составляющая - р-поляризация проходит первый элемент поляризационного делителя 2.2.1.1, отражается от второго элемента поляризационного делителя 2.2.1.2, проходит через компенсатор 2.2.2 и дополнительно фокусируется при компенсации оптического пути, производится уменьшение его фокусного расстояния, проходит поляризатор 2.2.3 и фокусируется во второй зоне чувствительной площадки фото приемного устройства 2.2.4 в зоне р-поляризации. За счет дополнительной фокусировки второй составляющей в компенсаторе при компенсации оптического пути производится уменьшение его фокусного расстояния, и, как следствие, линейное поле этого канала и вторая зона площадки фотоприемного устройства, куда она фокусируется, уменьшаются. И не происходит наложения изображений на границе между каналами.
Сигналы с первой и второй зон чувствительной площадки фото приемного устройства 2.2.4 поступают в электронный блок управления и обработки 4, в котором формируется сигнал, пропорциональный отношению интенсивности отраженного излучения с плоскостью поляризации, ортогональной плоскости поляризации облучающего излучения к интенсивности отраженного излучения с плоскостью поляризации, совпадающей с плоскостью поляризации облучающего излучения. При отражении от оптических и оптико-электронных приборов поляризация не изменяется. По величине формируемого сигнала в электронном блоке управления и обработки 4 осуществляют обнаружение в поле зрения системы оптических и оптико-электронных приборов. В устройстве управления и обработки 4 производят измерение координат обнаруженных целей. В устройстве наблюдения 1 производится индикация соответствующей зоны обнаруженных целей. Цель подводится в центральную зону поля зрения устройства наблюдения 1.
Подается командный сигнал с электронного блока управления и обработки 4 на включение и функционирование устройства дальномерного 3. Лазерное излучение блока передающего 3.1 дальномера 3 с необходимой диаграммой направленностью направляется на обнаруженные цели. Отраженное излучение от целей поступает в блок приемный дальномера. Производят измерение дальности до оптических и оптико-электронных приборов. Результаты измерений координат целей и дальности выводятся на экран монитора устройства наблюдения 1.
Использование дополнительной фокусировки в компенсаторе при компенсации оптического пути позволяет уменьшить фокусное расстояние и линейное поле второго канала, за счет этого уменьшается размер второй зоны площадки фотоприемного устройства и не происходит наложение изображений на границе между каналами.
Таким образом, предложен способ обнаружения оптических и оптико-электронных приборов, в котором приемный блок устройства обнаружения выполнен в виде двухканальной системы построения изображений с возможностью: осуществлять раздельную регистрацию изображений с s- и р- поляризацией с различными фокусными расстояниями каналов и линейными полями фотоприемного устройства.
Использование предложенного способа позволяет построить в двухканальной системе качественную картину изображений без наложения на границе между каналами, повысить эффективность обнаружения оптических и оптико-электронных приборов за счет повышения помехозащищенности и точность определения координат обнаруженных целей на границе между каналами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2568336C2 |
| Устройство обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2746089C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПОДАВЛЕНИЯ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ МАЛЫХ БЕСПИЛОТНЫХ ВОЗДУШНЫХ СУДОВ | 2018 |
|
RU2680605C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 1999 |
|
RU2155357C1 |
| Лазерный дальномер с функцией обнаружения оптических и оптико-электронных устройств | 2017 |
|
RU2660329C1 |
| ПРИЕМО-ПЕРЕДАЮЩЕЕ ОПТИЧЕСКОЕ УСТРОЙСТВО | 2022 |
|
RU2804833C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2013 |
|
RU2540154C2 |
| Лазерный обнаружитель оптических сигналов | 2023 |
|
RU2816284C1 |
| Лазерный дальномер с сумматором зондирующих пучков | 2016 |
|
RU2621476C1 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |

Изобретение относится к оптико-электронному приборостроению и может использоваться в обзорно поисковых оптико-электронных системах лазерной локации. Технический результат состоит в повышении эффективности обнаружения приборов путем повышения помехозащищенности, повышении точности определения координат обнаруженных целей. Для этого осуществляют облучение зоны предполагаемого расположения оптических и оптико-электронных приборов лазерным поляризованным излучением, прием отраженного излучения и деление отраженного излучения на две ортогонально-поляризованные составляющие в поляризационном делителе, чувствительную площадку фотоприемного устройства делят на две неравные зоны для раздельной регистрации первой и второй составляющих отраженного излучения, первую составляющую отражают от первого элемента поляризационного делителя и фокусируют ее в первой зоне чувствительной площадки фотоприемного устройства, вторую составляющую отражают от второго элемента поляризационного делителя, производят дополнительную фокусировку при компенсации оптического пути и уменьшение фокусного расстояния и фокусируют во второй зоне чувствительной площадки фотоприемного устройства, формируют сигнал, пропорциональный отношению интенсивности отраженного излучения, имеющего плоскость поляризации, ортогональную плоскости поляризации облучающего излучения, к интенсивности излучения, имеющего плоскость поляризации, совпадающую с плоскостью поляризации облучающего излучения, по величине этого сигнала осуществляют обнаружение в поле зрения системы оптических и оптико-электронных приборов, измеряют координаты обнаруженных целей и измеряют дальность до них. 2 ил.
Способ обнаружения оптических и оптико-электронных приборов, основанный на облучении зоны предполагаемого расположения оптических и оптико-электронных приборов лазерным поляризованным излучением, приеме и делении отраженного излучения на две ортогонально-поляризованные составляющие в поляризационном делителе, разделении чувствительной площадки фотоприемного устройства на две зоны для раздельной регистрации первой и второй составляющих отраженного излучения, отражении первой составляющей от первого элемента поляризационного делителя и фокусировке ее в первой зоне на чувствительной площадке фотоприемного устройства, формировании сигнала, пропорционального отношению интенсивности отраженного излучения, имеющего плоскость поляризации, ортогональную плоскости поляризации облучающего излучения, к интенсивности излучения, имеющего плоскость поляризации, совпадающую с плоскостью поляризации облучающего излучения, отражении второй составляющей от второго элемента поляризационного делителя, компенсации ее оптического пути и фокусировке во второй зоне чувствительной площадки фотоприемного устройства, обнаружении в поле зрения системы оптических и оптико-электронных приборов, измерении координат обнаруженных целей, измерении дальности до них, отличающийся тем, что фокусные расстояния первой и второй составляющих разные, площадка фотоприемного устройства разделена на неравные зоны, произведена дополнительная фокусировка второй составляющей при компенсации оптического пути.
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2568336C2 |
| ЛАЗЕРНАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1996 |
|
RU2113717C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 1999 |
|
RU2155357C1 |
| СПОСОБ СЪЕМА ИНФОРМАЦИИ С ВОЛОКОННО-ОПТИЧЕСКОГО КАНАЛА | 2006 |
|
RU2325763C2 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| DE 3719235 A1, 12.12.1988 | |||
| АДАПТИВНОЕ ЦИФРОВОЕ ДИФФЕРЕНЦИРУЮЩЕЕ И ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2535467C1 |

