Изобретение относится к лазерной технике, а именно к аппаратуре лазерной дальнометрии.
Известны лазерные измерители дальности, содержащие приемный канал, включающий объектив и фотоприемное устройство, и параллельный ему передающий канал, включающий оптическую систему и лазерный излучатель [1].
Подобные устройства характеризуются наличием аппаратной функции (геометрического фактора) [2], характеризующей неполное перекрытие полей зрения приемного и передающего каналов. На малых дальностях эти поля не перекрываются, в результате чего образуется теневая зона, в пределах которой измерения дальности невозможны.
Наиболее близким по технической сущности к предлагаемому является техническое решение, направленное на сокращение теневой зоны [3]. Этот лазерный измеритель дальности содержит передающий канал для формирования пучка зондирующего излучения и направления его на цель, параллельный ему приемный канал для приема отраженного целью сигнала, причем передающий канал включает лазерный излучатель и передающую оптическую систему, приемный канал включает фотоприемное устройство и приемный объектив, а поля зрения передающего и приемного каналов перекрываются на дальности R1, соответствующей протяженности теневой зоны, определяемой взаимным расположением передающего и приемного каналов. В этом измерителе дальности расстояние между передающим и приемным каналами сокращено, благодаря чему и обеспечивается укорочение теневой зоны.
Недостатком этого устройства является принципиальная невозможность сокращения теневой зоны до расстояний порядка нескольких сантиметров вследствие наличия элементов конструкции (оправы, бленды, светозащитные шторки и т.п), препятствующих дальнейшему сближению передающего и приемного каналов.
Задачей изобретения является уменьшение минимальной измеряемой дальности путем сокращения теневой зоны аппаратной функции.
В одном из вариантов предлагаемого решения поставленная задача решается за счет того, что в известном лазерном измерителе дальности, содержащем передающий канал для формирования пучка зондирующего излучения и направления его на цель, включающий лазерный излучатель и передающую оптическую систему, параллельный ему приемный канал для приема отраженного целью сигнала, включающий фотоприемное устройство и приемный объектив, в передающий канал введен оптический элемент с возможностью изменения направления оптической оси, установленный так, чтобы часть энергии зондирующего излучения направлялась в сторону целей, расположенных в диапазоне дальностей от R0 до R1 в поле зрения приемного канала, а доля этого излучения, отраженного целью и поступающего через приемный объектив на чувствительную площадку фотоприемного устройства, соответствовала порогу срабатывания последнего, где
R0<R1 - заданная минимальная измеряемая дальность;
R1 - протяженность теневой зоны, образуемой в диапазоне дальностей, где поля зрения передающего и приемного каналов не перекрываются.
В этом варианте оптический элемент представляет собой отражатель с плоской или криволинейной поверхностью, установленный на оправе передающей оптической системы со стороны, противоположной приемному объективу.
Кроме того, оптический элемент может представлять собой клин, одна или обе поверхности которого могут быть плоскими или криволинейными.
В другом варианте предлагаемого решения в лазерном измерителе дальности, содержащем передающий канал для формирования пучка зондирующего излучения и направления его на цель, включающий лазерный излучатель и передающую оптическую систему, параллельный ему приемный канал для приема отраженного целью сигнала, включающий фотоприемное устройство и приемный объектив, в приемный канал введен оптический элемент с возможностью изменения направления оптической оси, установленный так, чтобы часть энергии зондирующего излучения, отраженного целями, расположенными в диапазоне дальностей от R0 до R1, отклонялась оптическим элементом через приемный объектив на чувствительную площадку фотоприемного устройства, а энергия этого излучения соответствовала порогу срабатывания последнего, где
R0<R1 - заданная минимальная измеряемая дальность;
R1 - протяженность теневой зоны, образуемой в диапазоне дальностей, где поля зрения передающего и приемного каналов не перекрываются.
В данном варианте оптический элемент может представлять собой отражатель с плоской или криволинейной поверхностью, установленный на оправе приемного объектива со стороны, противоположной передающей оптической системе.
В этом варианте оптический элемент может также представлять собой клин, одна или обе поверхности которого могут быть плоскими или криволинейными, установленный в приемном объективе так, чтобы поступающее на него излучение, отраженное целями в диапазоне дальностей от R0 до R1, отклонялось в сторону чувствительной площадки фотоприемного устройства.
Кроме того, в этом варианте оптический элемент может представлять собой клин, одна или обе поверхности которого могут быть плоскими или криволинейными, установленный вне приемного объектива так, чтобы поступающее на него излучение, отраженное целями в диапазоне дальностей от R0 до R1, отклонялось в сторону чувствительной площадки фотоприемного устройства.
На фиг.1 представлена блок-схема лазерного измерителя дальности. На фиг.2-4 - варианты исполнения устройства. Фиг.5 поясняет характер аппаратной функции и ее теневой зоны.
Лазерный измеритель дальности (фиг.1) включает три оптических канала. Передающий канал 1 для формирования пучка зондирующего излучения включает лазерный излучатель 2 и передающую оптическую систему 3. Параллельный передающему приемный канал 4 для приема отраженного целью сигнала включает фотоприемное устройство 5 и приемный объектив 6. Третий оптический канал образован дефлектором излучения 7, оптически связанным по выходу с фотоприемным устройством 5 и установленным так, чтобы на свой вход принимать излучение, отраженное от целей в заданном диапазоне дальностей.
На фиг.2 показана функциональная схема устройства по первому варианту с дефлектором излучения, выполненным в виде зеркального отражателя 7, установленного в передающую оптическую систему 3.
На фиг.3 показана функциональная схема устройства по второму варианту с дефлектором излучения, выполненным в виде зеркального отражателя 7, установленного в приемный объектив 6.
На фиг.4 показана функциональная схема устройства по второму варианту с дефлектором излучения 7, выполненным в виде клина. На фиг 4а) клин установлен в приемном объективе 6, а на фиг.4б) - вне приемного объектива.
Устройство работает следующим образом.
При излучении лазерным излучателем 2 зондирующего импульса на выходе передающей оптической системы 3 формируется расходящийся пучок излучения, образующий поле передающего канала (фиг.5). Отраженное целью излучение попадает в поле приемного канала и с помощью приемного объектива 6 фокусируется на чувствительной площадке фотоприемного устройства 5 (фиг.2-4). Дальность до цели R определяют по известной зависимости [1] R=ct/2, где c - скорость света, t - время между моментом излучения зондирующего импульса и моментом срабатывания фотоприемного устройства от излучения, отраженного целью.
В дальней зоне при расстоянии до цели R>R2 поля передающего и приемного каналов полностью перекрываются, обеспечивая попадание на фотоприемное устройство достаточной для его срабатывания энергии излучения, отраженного целью.
На малых расстояниях до цели поля передающего и приемного каналов перекрываются не полностью, а в теневой зоне при R<R1 (фиг.5) вообще не перекрываются, что делает невозможным измерение при расстояниях до цели R<R1.
Зависимость степени перекрытия полей передающего и приемного каналов от дальности описывается аппаратной функцией A1(R). Дефлектор излучения 7 в первом варианте изобретения отклоняет часть зондирующего пучка в сторону поля приемного канала, обеспечивая перекрытие этих полей на дальностях R0<R<R1. Во втором варианте дефлектор излучения 7 формирует дополнительное поле приемного канала, пересекающееся с полем передающего канала на дальностях R0<R<R1. В результате в обоих вариантах формируется дополнительная аппаратная функция A0(R), показанная на фиг.5 пунктиром.
Результирующая аппаратная функция устройства A(R)=A0(R)+A1(R) обеспечивает возможность измерения дальностей при расстояниях до цели R0<R, причем R0<R1. Экспериментально установлено, что введение дефлектора согласно одному из описанных вариантов позволяет сократить теневую зону и, соответственно, минимальную измеряемую дальность с 5-30 м до 0,05-0,2 м.
Таким образом, предлагаемый лазерный измеритель дальности обеспечивает решение поставленной задачи - уменьшение минимальной измеряемой дальности путем сокращения теневой зоны аппаратной функции.
Данный вывод подтвержден положительными результатами изготовления и испытаний макетного образца. После корректировки документации по результатам испытаний лазерный дальномер будет запущен в производство.
Источники информации
1. Ермаков Б.А., Возницкий М.В. Получение и обработка информации в импульсных лазерных дальномерах // Оптический журнал №10 (1993), - с.15-32.
2. С.А.Даничкин. Границы действия геометрического фактора лидара. IV Всесоюзный симпозиум по лазерному зондированию атмосферы. Тезисы докладов. Томск, 1976, с.79-82.
3. Патент США №4737624 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР (ВАРИАНТЫ) | 2011 |
|
RU2475702C1 |
| ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 2011 |
|
RU2471203C1 |
| Лазерный дальномер | 2017 |
|
RU2655003C1 |
| ДАЛЬНОМЕРНОЕ УСТРОЙСТВО | 2018 |
|
RU2684445C1 |
| Способ локационного измерения дальности | 2021 |
|
RU2766065C1 |
| ЛАЗЕРНЫЙ БИНОКЛЬ-ДАЛЬНОМЕР | 2010 |
|
RU2442959C1 |
| Импульсный лазерный дальномер | 2021 |
|
RU2756783C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| Устройство обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2746089C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2568336C2 |
Лазерный измеритель дальности содержит передающий канал для формирования пучка зондирующего излучения и направления его на цель. Передающий канал включает лазерный излучатель и передающую оптическую систему. Параллельный ему приемный канал для приема отраженного целью сигнала включает фотоприемное устройство и приемный объектив. В передающий канал введен оптический элемент с возможностью изменения направления оптической оси, установленный так, чтобы часть энергии зондирующего излучения направлялась в сторону целей, расположенных в диапазоне дальностей от R0 до R1 в поле зрения приемного канала. Доля этого излучения, отраженного целью и поступающего через приемный объектив на чувствительную площадку фотоприемного устройства, соответствует порогу срабатывания последнего. R0<R1 - заданная минимальная измеряемая дальность. R1 - протяженность теневой зоны, образуемой в диапазоне дальностей, где поля зрения передающего и приемного каналов не перекрываются. Технический результат - уменьшение минимальной измеряемой дальности путем сокращения теневой зоны аппаратной функции. 2 н. и 5 з.п. ф-лы, 5 ил.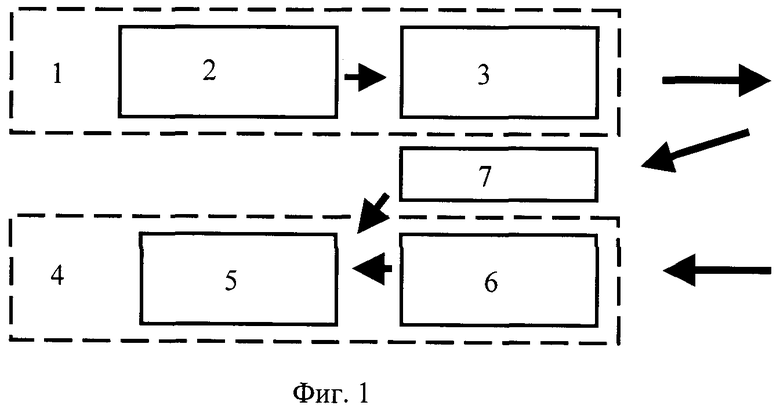
1. Лазерный измеритель дальности, содержащий передающий канал для формирования пучка зондирующего излучения и направления его на цель, включающий лазерный излучатель и передающую оптическую систему, параллельный ему приемный канал для приема отраженного целью сигнала, включающий фотоприемное устройство и приемный объектив, отличающийся тем, что в передающий канал введен оптический элемент с возможностью изменения направления оптической оси, установленный так, чтобы часть энергии зондирующего излучения направлялась в сторону целей, расположенных в диапазоне дальностей от R0 до R1 в поле зрения приемного канала, а доля этого излучения, отраженного целью и поступающего через приемный объектив на чувствительную площадку фотоприемного устройства, соответствовала порогу срабатывания последнего, где
R0<R1 - заданная минимальная измеряемая дальность;
R1 - протяженность теневой зоны, образуемой в диапазоне дальностей, где поля зрения передающего и приемного каналов не перекрываются.
2. Лазерный измеритель дальности по п.1, отличающийся тем, что оптический элемент представляет собой отражатель с плоской или криволинейной поверхностью, установленный на оправе передающей оптической системы со стороны, противоположной приемному объективу.
3. Лазерный измеритель дальности по п.1, отличающийся тем, что оптический элемент представляет собой клин, одна или обе поверхности которого плоские или криволинейные.
4. Лазерный измеритель дальности, содержащий передающий канал для формирования пучка зондирующего излучения и направления его на цель, включающий лазерный излучатель и передающую оптическую систему, параллельный ему приемный канал для приема отраженного целью сигнала, включающий фотоприемное устройство и приемный объектив, отличающийся тем, что в приемный канал введен оптический элемент с возможностью изменения направления оптической оси, установленный так, чтобы часть энергии зондирующего излучения, отраженного целями, расположенными в диапазоне дальностей от R0 до R1, отклонялась оптическим элементом через приемный объектив на чувствительную площадку фотоприемного устройства, а энергия этого излучения соответствовала порогу срабатывания последнего, где
R0<R1 - заданная минимальная измеряемая дальность;
R1 - протяженность теневой зоны, образуемой в диапазоне дальностей, где поля зрения передающего и приемного каналов не перекрываются.
5. Лазерный измеритель дальности по п.4, отличающийся тем, что оптический элемент представляет собой отражатель с плоской или криволинейной поверхностью, установленный на оправе приемного объектива со стороны, противоположной передающей оптической системе.
6. Лазерный измеритель дальности по п.4, отличающийся тем, что оптический элемент представляет собой клин, одна или обе поверхности которого плоские или криволинейные, установленный в приемном объективе так, чтобы поступающее на него излучение, отраженное целями в диапазоне дальностей от R0 до R1, отклонялось в сторону чувствительной площадки фотоприемного устройства.
7. Лазерный измеритель дальности по п.4, отличающийся тем, что оптический элемент представляет собой клин, одна или обе поверхности которого плоские или криволинейные, установленный вне приемного объектива так, чтобы поступающее на него излучение, отраженное целями в диапазоне дальностей от R0 до R1, отклонялось в сторону чувствительной площадки фотоприемного устройства.
| US 4737624 A, 12.04.1988 | |||
| Способ получения искусственных смол для пресс композиций | 1952 |
|
SU106759A1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2007 |
|
RU2362120C1 |

