Изобретение относится к области позитронной визуализации и, в частности, к реконструкции по данным, собираемым в процессе позитронной эмиссионной томографии (PET). Настоящее изобретение находит применение, в частности в медицинской и других областях, где желательно формировать данные изображения, характеризующие представляющую интерес локальную область исследуемого объекта.
Позитронная эмиссионная томография (PET) является областью медицинской радиологии, в которой позитронно-активный радиофармацевтический препарат, например 18F-фтордеоксиглюкозу (FDG), вводят в организм пациента. Когда радиофармацевтический препарат распадается, образуются позитроны. В частности, каждый из множества позитронов взаимодействует с электроном в ходе известного акта позитронной аннигиляции, с формированием, при этом, пары совпадающих 511 кэВ гамма-квантов, которые перемещаются в противоположных направлениях по линии срабатывания (LOR). Пара гамма-квантов, регистрируемых в пределах времени совпадения, записывается PET-сканером как акт аннигиляции.
Разработки в технологии детекторов привели к возможности получения пролетных (TOF (времяпролетных)) PET-сканеров, в которых регистрируются также разности времен прибытия пар совпадающих гамма-квантов. Информация TOF прогнозирует наиболее вероятное положение аннигиляции вдоль LOR. Так как реальные детекторные системы характеризуются ограниченной временной разрешающей способностью, местоположение аннигиляции обычно моделируют в соответствии с гауссовым распределением вероятностей.
Как уже установлено, TOF PET (времяпролетная позитронная эмиссионная томография) улучшает дисперсию шума более значительно к периферии объекта и, поэтому, обладает повышенной способностью обнаруживать патологические изменения в сравнении с традиционной PET без TOF-измерений при более крупных объектах. Преимуществом TOF PET является также использование меньшего угла проекции для обеспечения разрешающей способности в изображении, сравнимой с разрешающей способностью PET без TOF. Кроме того, TOF PET обладает меньшей чувствительностью к нормированию детекторов и недостаточной поправке на рассеяние, чем PET без TOF.
Данные сканирования служат для реконструкции объемных данных или данных пространства изображения, характеризующих распределение радионуклида в объекте, обычно с использованием итеративных методов реконструкции. Примеры итеративных методов реконструкции содержат методы максимизации ожидания посредством максимального правдоподобия (ML-EM), максимизации ожидания посредством упорядоченных подмножеств (OS-EM), максимизации ожидания посредством блочной итерации с изменением масштаба (RBI-EM), максимизации ожидания посредством построчных операций (RAMLA), сопряженных градиентов (CG) и квазиньютоновские методы с ограниченной памятью (LMQN). Смотри работы Shepp and Vardi, Maximum Likelihood Reconstruction for Emission Tomography, IEEE Trans. Med. Imaging vol. MI-2, pp 113-122 (1982); Hudson and Larkin, Accelerated Image Reconstruction Using Ordered Subsets of Projection Data, IEEE Trans. Med. Imaging vol. 13, no. 4, pp 601-609 (1994); Byrne, Accelerating the EMML Algorithm and Related Iterative Algorithms by Rescaled Block-Iterative Methods, IEEE Trans. Image Processing, vol. 7, no. 1 pp. 100-109 (1998); Brown and DePierro, A Row-Action Alternative to the EM Algorithm for Maximizing Likelihoods in Emission Tomography, IEEE Trans. Med. Imaging vol. 15, no. 5, pp 687-699 (1996); Mumcuoglu, E.U.; Leahy, R.; Cherry, S. R.; Zhenyu Zhou, Fast gradient-based methods for Bayesian reconstruction of transmission and emission PET images, IEEE Trans. Med. Imag., 13(4): 687-701 (1994); C. Goldstein, W. Wang and G. Gindi, Limited-Memory Quasi-Newton Iterative Reconstruction in Emission Computed Tomography, 46th Annual Meeting of the Society of Nuclear Medicine, California, (1999); J. M. Bardsley, A limited-memory, quasi-Newton preconditioner for nonnegatively constrained image reconstruction, J. Opt. Soc. Am. A 21, 724-731 (2004).
Методы локальной томографической реконструкции на основе аналитических алгоритмов использовали усеченные данные проекций из данных проекций для реконструкции представляющей интерес локальной области (ROI) объекта. Для преобразования Радона и экспоненциального преобразования Радона применяли аналитические алгоритмы на основе фильтрованных обратных проекций (FBP) для поиска неоднородностей в ROI. Смотри Ramm, et al., The Radon Transform and Local Tomography (CRC Press, 1996); Katsevich, et al., патент США № 5539800, Pseudolocal Tomography; Katsevich, et al., патент США № 5550892, Enhanced Local Tomography; Katsevich, et al., патент США № 5717211, Generalized Local Emission Tomography. В рентгеновской локальной томографии применяли также аналитический способ на основе вейвлетов. Смотри Walnut, et al., патент США № 5953388, Method and Apparatus for Processing Data from Tomographic Imaging Systems; Bilgot, et al., Wavelets, Local Tomography and Interventional X-Ray Imaging, IEEE Nuclear Science Symposium 2004 Conference Record, vol. 6, pp. 3505-3509 (Oct. 2004); смотри также Holschneider, Inverse Radon Transforms Through Inverse Wavelet Transforms, Inverse Problems, vol. 7 pp. 853-861 (1999). При локальной реконструкции ROI для планарных интегральных данных, сформированных с использованием поворотного полоскового детектора, в области однофотонной эмиссионной компьютерной томографии (SPECT) применяли итеративный алгоритм сопряженных градиентов. Смотри Zeng, et al., Local Tomography Property of Residual Minimization Reconstruction with Planar Integral Data, IEEE Transactions on Nuclear Science, vol. 50, no. 5, pp. 1590-1594 (2003). В области SPECT, итерационные алгоритмы, вообще говоря, работают лучше аналитических способов для локальной томографии.
Аспекты настоящей заявки относятся к упомянутым и другим вопросам.
В соответствии с первым аспектом устройство содержит блок пространственного усечения данных проекций, который выполняет пространственное усечение данных проекций в позитронной эмиссионной томографии, собранных при позитронном эмиссионном обследовании объекта, и блок итерационной реконструкции, который реконструирует усеченные данные проекций, чтобы формировать данные пространства первого изображения, характеризующие объект.
В соответствии с другим аспектом способ позитронной эмиссионной локальной томографии содержит этап итерационной реконструкции пространственно усеченных данных проекций, характеризующих позитронные аннигиляции, происходящие в объекте, и собранных с использованием позитронного эмиссионного сканера, чтобы сформировать данные пространства первого изображения, характеризующие объект. Способ содержит также этап представления данных пространства первого изображения в форме, воспринимаемой человеком.
В соответствии с другим аспектом, машиночитаемый носитель информации содержит команды, которые, при исполнении компьютером, предписывают компьютеру выполнять способ. Способ содержит этап выполнения итерационной локальной реконструкции пространственно усеченных данных проекций, собранных при позитронном эмиссионном обследовании объекта, чтобы формировать данные пространства первого изображения, характеризующие объект.
В соответствии с другим аспектом, устройство содержит позитронный эмиссионный сканер и блок итерационной локальной реконструкции, функционально связанный со сканером. Блок реконструкции реконструирует пространственно усеченные данные проекций, собранные вдоль линий срабатывания, которые пересекают поперечную подобласть объекта, чтобы формировать данные пространства первого изображения, характеризующие объект. Устройство содержит также блок компенсации движений, который компенсирует движение подобласти.
Специалистам в данной области техники будут очевидны еще одни аспекты настоящего изобретения после прочтения и изучения прилагаемого описания.
Изобретение может быть реализовано в форме различных компонентов и схем расположения компонентов и различных этапов и схем расположения этапов. Чертежи предназначены только для иллюстрации предпочтительных вариантов осуществления и не подлежат истолкованию в смысле ограничения изобретения.
Фиг. 1 представляет схему комбинированной PET/CT-системы (позитронной эмиссионной томографии/компьютерной томографии).
Фиг. 2 - схема, поясняющая работу блока пространственного усечения данных проекций.
Фиг. 3 - изображение смоделированного фантома.
Фиг. 4 - график для пояснения средней квадратичной ошибки.
Фиг. 5 - график для пояснения средней квадратичной ошибки.
Фиг. 6 - схема блока локальной реконструкции.
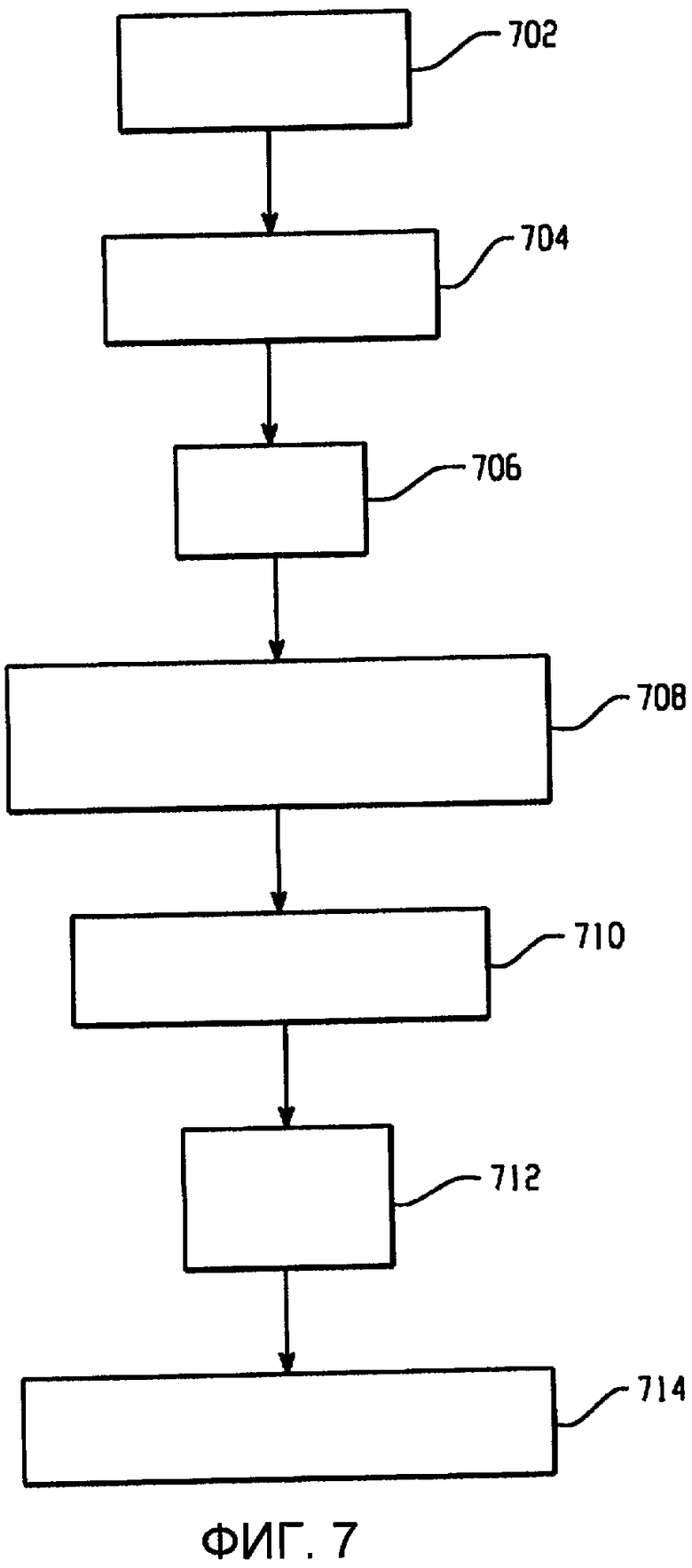
Фиг. 7 - схема способа.
Как показано на фиг. 1, комбинированная PET/CT-система 100 (система позитронного эмиссионного томографа/компьютерного томографа) содержит секцию 102 PET-гентри и секцию 104 CT-гентри. Секция 102 PET-гентри содержит гамма-чувствительные детекторы 106, расположенные по кольцу вокруг области 108 исследования. Детекторы 106 детектируют характеристику гамма-излучения актов позитронной аннигиляции, происходящих в области 108 исследования методом PET (PET-исследования). В зависимости от таких факторов, как геометрия и конструкция детекторной системы, PET-система может иметь эффективное поперечное поле обзора (FOV), которое имеет меньший поперечный размер, чем область 108 исследования.
Секция 104 CT-гентри содержит источник 110 излучения, например, рентгеновскую трубку, который поворачивается вокруг области 112 исследования методом CT (CT-исследования). Детекторы 114, чувствительные к излучению, регистрируют излучение, излучаемое рентгеновским источником, которое пересекло область 112 исследования. Поперечное FOV секции 104 CT-гентри зависит от таких факторов, как геометрия и конструкция рентгеновского источника 110 и детектора 114, и, в некоторых случаях, может быть меньше или иначе отличаться от поперечного FOV секции 102 PET-гентри.
Секция 102 PET-гентри и секция 104 CT-гентри предпочтительно расположены вблизи их соответствующих областей 108, 112 исследования, расположенных вдоль общей продольной оси или оси z. Опора 116 для объекта поддерживает подлежащий визуализации объект 118, например, пациента. Опора 116 для объекта предпочтительно допускает продольное перемещение согласовано с работой PET/CT-системы 100, чтобы объект 118 можно было сканировать во множестве положений вдоль продольной оси обеими секциями 102, 104 PET- и CT-гентри.
Система 122 сбора CT-данных обрабатывает сигналы из CT-детекторов 114 для формирования данных CT-проекций, показывающих ослабление излучения вдоль множества линий или лучей через область 112 исследования. Блок 126 CT-реконструкции выполняет реконструкцию по данным CT-проекций, с использованием подходящих алгоритмов реконструкции для формирования данных изображения, показывающих пространственные изменения ослабления излучения объектом 118.
Система 120 сбора PET-данных обеспечивает данные PET-проекций, например, список актов аннигиляции, регистрируемых детекторами 106. В частности, данные проекций обеспечивают информацию на LOR для каждого акта, например поперечное и продольное положение LOR, ее поперечный и азимутальный углы и информацию о TOF в случае наличия в системе возможностей определения времени пролета. В альтернативном варианте данные могут трансформироваться по элементам разрешения в, по меньшей мере, одну синограмму или элемент разрешения проекции.
Идентификатор 140 локальной представляющей интерес области (ROI) идентифицирует локальную ROI, которая обычно является подмножеством более крупного исследуемого объекта. По одному методу, ROI определяют с использованием априорной информации об объекте. В случае с пациентом, например, местоположение ROI, которая содержит такой орган, как сердце, можно оценить с использованием известных морфологических характеристик. В другой реализации компьютерный процессор идентифицирует местоположение ROI либо автоматически, либо полуавтоматически в ходе реконструкции с низкой разрешающей способностью или другой реконструкции данных CT- или PET-системы, например, чтобы определить местоположение патологического изменения, центра активности или другого представляющего интерес поля. Границы ROI могут быть также заданы вручную пользователем с использованием изображения с низкой разрешающей способностью или другого изображения. В еще одной реализации, которая особенно применима в ситуациях, когда участок объекта находится за пределами эффективного поперечного FOV одной из или обеих PET- и/или CT-систем, ROI можно устанавливать как такой участок объекта, который находится внутри соответствующего поля обзора. Следует отметить, что описанные далее методы можно комбинировать; и возможно также применение других подходящих методов.
Блок 138 пространственного усечения данных PET-проекций выполняет пространственное усечение данных проекций, например, распознаванием данных проекций, собранных вдоль LOR, которые проходят через идентифицированную ROI, или отклонением данных, которые не удовлетворяют такому условию. Например, на фигуре 2 изображена первая LOR 202, которая проходит через ROI 204, которая содержит сердце 206, и вторая LOR 208, которая не проходит через ROI. Следует отметить, что блок 138 пространственного усечения может отсутствовать, в частности, в случаях, когда участок объекта находится вне поперечного FOV в PET-системе 102 визуализации, причем, в таком случае, собираемые данные проекций подвергаются пространственному усечению.
Как показано на фигуре 1, в случае с системой, которая содержит возможность компенсации движения, блок 142 локальной компенсации движения компенсирует движение ROI. Движение объекта можно измерять с использованием подходящего монитора движения, например, дыхательного, кардио- или другого физиологического монитора, в случае с пациентом. Движение можно также обнаруживать посредством анализа данных пространства проекций или пространства изображений. Аналогично, компенсацию движения можно применить к пространственно усеченным данным проекций перед реконструкцией или в области пространства изображений после реконструкции. Примеры методов обнаружения и компенсации локальных движений описаны также в заявке на патент № PCT/US2007/61597, поданной 5 февраля 2007 г. под названием Local Motion Compensation Based on List Mode Data, и предварительной заявке на патент США № 60/888560, поданной 7 февраля 2007 г. под названием Motion Estimation in Treatment Planning, причем, обе данные заявки принадлежат владельцу настоящей заявки и в явной форме целиком включены в настоящую заявку.
Блок 144 реконструкции использует метод итерационной реконструкции для формирования данных пространства изображения, характеризующих распределение радионуклида в объекте 118. Как более подробно поясняется ниже, блок 144 реконструкции содержит блок 146 реконструкции локальной ROI, который реконструирует по усеченным данным проекций. Блок 144 реконструкции может также использовать неусеченные данные проекций (т.е. данные проекций, которые содержат другие акты, регистрируемые по LOR, которые не проходят через ROI), чтобы реконструировать более крупный объект.
Система может также содержать блок 148 объединения изображений. В таком случае, объединенное реконструированное изображение более крупного объекта (например, изображение(ния), собранное(ные), чем-то одним из CT-сканера 104 или PET-сканера 102 или обоими) можно объединять или составлять с изображением локальной ROI. Когда изображения характеризуются разными системами координат, пространственными разрешающими способностями или чем-то подобным, процессор совмещения можно использовать для совмещения изображений или для обеспечения других необходимых поправок. Применение блока 148 объединения изображений особенно полезно при компенсации локальных движений или в других случаях применения, в которых полезно представлять ROI в составе более крупного объекта.
Рабочая станция служит операторским пультом 128. Пульт 128 содержит удобочитаемое устройство вывода, например, монитор или дисплей, и устройство ввода, например клавиатуру и мышь. Программное обеспечение, содержащееся в пульте 128, позволяет оператору выполнять такие функции, как взаимодействие с идентификатором 140 ROI и блоком 148 объединения изображений, наблюдение или иное манипулирование данными изображения, сформированными блоками 144, 126 реконструкции PET- или CT-систем, создание требуемых протоколов сканирования, запуск и прекращение сканирований и т.п.
Возможны также изменения в системе 100. Например, CT-секция сканера может отсутствовать, находиться на удалении от секции 102 PET-гентри или заменена другим устройством формирования изображений, например магнитно-резонансным (MR) сканером. В другом примере информация об ослаблении или анатомических объектах может обеспечиваться передающим источником, связанным с секцией 102 PET-гентри.
Ниже приведено описание блока 146 реконструкции локальной ROI. Хотя нижеприведенное описание относится к двумерной (2-мерной) реконструкции для ясности объяснения, специалистам со средним уровнем компетентности в данной области техники будет очевидно, что описанные методы равным образом применимы и могут легко распространяться на трехмерную (3-мерную) реконструкцию.
При наличии излучающего объекта f(x,y) с его коэффициентами μ(x,y) ослабления в двумерном (2-мерном) пространстве, после поворота на угол  против часовой стрелки, в координатах детектора получают
против часовой стрелки, в координатах детектора получают  и
и  . Координаты (s,t) детектора и координаты (x,y) объекта при данном угле φ связаны уравнением:
. Координаты (s,t) детектора и координаты (x,y) объекта при данном угле φ связаны уравнением:
Уравнение 1
 и
и  .
.
При визуализации методом PET, среднее из измеренных данных проекций, после устранения случайных помех и рассеяния, исправления на колебания эффективности детектора и надлежащей интерполяции, можно представить в виде gTOF(s,t,φ) для сканера с возможностью TOF и в виде g(s,φ) для традиционного сканера, как показано ниже в уравнениях 2 и 3, соответственно:
Уравнение 2
 ,
,
Уравнение 3
 ,
,
где a(s,φ) означает коэффициент ослабления, заданный в виде:
Уравнение 4
 .
.
Член hTOF(t) означает ядро свертки для режима TOF, которое часто моделируют как гауссово распределение с известной полной шириной кривой распределения на уровне полумаксимума (FWHM) и шириной ±nσ ядра (σ=FWHM/2,355). Следует отметить, что суммирование всех счетных импульсов по t в проекции gTOF(s,t,φ) в режиме TOF дает проекцию g(s,φ) без TOF.
Из-за ограничений статистики счета фотонов в PET, измеренные данные  или
или  проекций обычно моделируют как случайный процесс Пуассона, показанный в уравнениях 5 и 6, соответственно:
проекций обычно моделируют как случайный процесс Пуассона, показанный в уравнениях 5 и 6, соответственно:
Уравнение 5
 ,
,
Уравнение 6
 .
.
Если даны уравнения 5 и 6, и в предположении, что коэффициент μ(x,y) ослабления известен, то целью реконструкции изображения в PET является реконструкция излучающего объекта f(x,y).
В статистиках с большим числом счетных импульсов, 2-мерная проекция gφ0(s,t) в режиме без TOF уже обеспечивает достаточно информации для реконструкции объекта с высокой точностью. 3-мерная проекция в режиме TOF обеспечивает дополнительную информацию об излучающем объекте. Например, при конкретном угле φ0 проекции, после коррекции на ослабление, gTOF φ0(s,t) является просто излучающим объектом, размытым вдоль измерения t, как показано в уравнении 2. Если временная разрешающая способность является достаточно высокой, то это просто задача восстановления изображения. Для получения излучающего объекта можно устранить нерезкость gTOF φ0(s,t) вдоль измерения t и повернуть изображение по часовой стрелке на угол φ0. Приведенное ядро локального размытия может обеспечивать однозначную информацию о характеристике локальной томографии при TOF-PET.
Предполагается, что, при локальной томографии, интерес представляет небольшая или локальная ROI объекта, имеющая центр с координатами (x0,y0) и обозначенная как ε{x0,y0}. Упомянутая локальная ROI объекта может вырождаться в единственный пиксель (x0,y0). С использованием уравнения 1, все LOR, которые проходят через локальную ROI, можно определить как ε{s0(φ)}, где s0(φ) = x0cosφ + y0sinφ. Если дана проекция в ε{s0(φ)}, то задачей локальной томографии является реконструкция объекта в локальной ROI ε{x0,y0}.
На основе уравнений 5 и 6, логарифмическое правдоподобие формируется на усеченных данных проекций в режиме TOF и без TOF:
Уравнение 7
 .
.
В этом случае применяется дискретный формат измеренной проекции  и излучающего объекта fn, где m указывает дискретную индексацию (s,t,φ) для режима TOF и (s,φ) для режима без TOF, и n указывает дискретную индексацию (x,y). Hmn является матрицей системы, которая представляет вероятность испускания фотона из элемента n объекта и его детектирования элементом m детектора. Матрица системы содержит ослабление как для режима TOF, так и режима без TOF, и ядро свертки Гаусса для режима TOF.
и излучающего объекта fn, где m указывает дискретную индексацию (s,t,φ) для режима TOF и (s,φ) для режима без TOF, и n указывает дискретную индексацию (x,y). Hmn является матрицей системы, которая представляет вероятность испускания фотона из элемента n объекта и его детектирования элементом m детектора. Матрица системы содержит ослабление как для режима TOF, так и режима без TOF, и ядро свертки Гаусса для режима TOF.
Уравнение 7 имеет большое сходство с логарифмическим правдоподобием неусеченных данных проекций. Однако данные проекций суммируются на локальных LOR, которые проходят через локальную ROI, вместо полных проекций. Следует отметить, что даже при том, что интерес представляет только локальная ROI объекта, прямую проекцию осуществляют на всех элементах объекта. Аналогично полным проекциям, матрица Гесса логарифмического правдоподобия усеченных проекций также является глобально выпуклой. Следовательно, существует единственное максимальное решение. Тогда остается ответить на вопрос, является ли упомянутое решение в точности таким, как исходный излучающий объект в пределах локальной ROI. Вероятность получения точной оценки объекта в ROI выше, когда локальная ROI имеет большой размер. Для небольшой локальной ROI, режим TOF с большей вероятностью дает точную оценку ROI объекта, чем режим без TOF, поскольку ядро Гаусса в режиме TOF характеризуется более точной локализацией, чем равномерное ядро в режиме без TOF.
Чтобы оптимизировать уравнение 7, применяют алгоритм максимизации ожидания (EM). Уравнение обновления можно выразить следующим образом, где k является числом итераций:
Уравнение 8
 .
.
Для ускорения сходимости применяется метод упорядоченных подмножеств (OS) на основе φ. Оценка объекта обновляется после того, как совершается обход всех углов в подмножестве. После того как совершается обход всех подмножеств, выполняется одна итерация.
Прямая проекция реализуется как оператор поворота и свертки для режима TOF и оператор поворота и суммирования для режима без TOF. Оба оператор умножаются на коэффициент ослабления. Обратная проекция осуществляется сначала как умножение на ослабление, затем как оператор свертки и обратного поворота для режима TOF, и как оператор равномерного размытия и обратного поворота для режима без TOF. Первоначальная оценка объекта настроена на равномерность по всему полю обзора (FOV) изображения.
Функцию ошибок можно применить для оценки эффективности работы блока 146 реконструкции ROI, в частности в связи с исследованием на фантоме или другим исследованием, когда излучающий объект известен. Функция среднеквадратичных ошибок (RMSE), которая оценивает ошибку оценки  объекта относительно излучающего объекта f в ROI, можно определить следующим образом:
объекта относительно излучающего объекта f в ROI, можно определить следующим образом:
Уравнение 9
 ,
,
где nROI является числом пикселей в локальной ROI.
Ниже описано компьютерное моделирование с использованием 2-мерного фантома 302 грудной клетки с размерами 420 миллиметров (мм) × 300 мм и с патологическим изменением 304 диаметром 32 мм в легком, как показано, в общем, на фигуре 3. Объект содержит FOV с 144×144 пикселями, и 4 мм размером пикселя.
В смоделированном излучающем объекте относительный контраст патологического изменения 304 к фону установлен равным 8:1, кожи 306 к фону установлен равным 1,3:1, и кости 308 к фону установлен равным 1,2:1. В карте ослабления отношение кости 308 к воде установлено равным 1,2:1; область 310 легких моделировали с ослаблением воздуха.
Проекцию моделировали с использованием эффекта ослабления, но без какого-либо изменения эффективности детектора, рассеяния или случайных помех. Имеется 192 отсчета в пределах π с шагом φ, 144 отсчета по s с 4 мм размером пикселя и 16 отсчетов по t с 36 мм размером пикселя. TOF характеризуется 700 пс (105 мм) FWHM. При моделировании применяется ширина ±5,5σ ядра в режиме TOF, и, при реконструкции изображения применяется ширина ±3σ ядра в режиме TOF. На всех дисплеях эмиссионного изображения для демонстрации низкоконтрастных деталей применяется линейная шкала уровней серого с 40% верхним порогом. На основе фантома грудной клетки сформирована проекция, свободная от шумов, и затем добавлен пуассоновский шум для моделирования проекции с шумами.
Три размера ROI (1 пиксель, 36 мм и 144 мм диаметр) выбраны и отцентрированы относительно пикселя (57, 79) патологического изменения. В проекции, свободной от шумов, алгоритм ROI-OS-EM (максимизации ожидания методом упорядоченных подмножеств ROI) с 12 подмножествами и вплоть до 20 итераций использовали для реконструкции в режимах как TOF, так и без TOF. На фигуре 4 представлены зависимости RMSE для режимов TOF и без TOF от числа итераций и подмножеств для локальных ROI с размерами 1 пиксель 402, 36 мм 404 и 144 мм 406, соответственно, где пунктирные линии отражают случай режима TOF, и сплошные линии отражают случай режима без TOF, соответственно. Алгоритмы для режимов как TOF, так и без TOF сходятся для средних и больших размеров ROI, но схождение в режиме TOF оказывается ближе к исходному фантому, чем в режиме без TOF. Когда ROI вырождается до 1 пикселя, в режиме TOF по-прежнему имеет место схождение к решению, однако, со сниженным уровнем контраста, но в режиме без TOF схождение совсем отсутствует.
В таблице показаны максимальное и среднее абсолютные смещения ROI в режимах TOF и без TOF на 10-х итерациях для трех размеров ROI:
Алгоритм ROI-OS-EM в режиме TOF работает точнее, чем алгоритм ROI-OS-EM в режиме TOF во всех случаях.
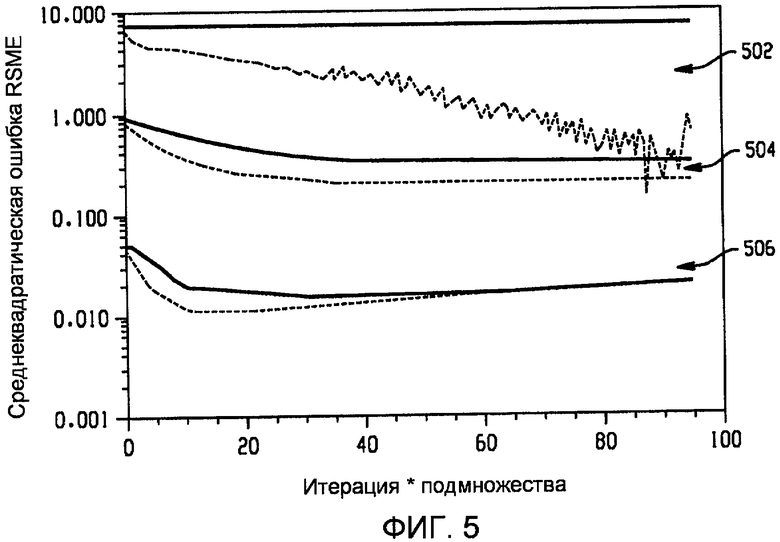
Для проекций с шумами выработано всего 400К счетных импульсов как для режима TOF, так и для режима без TOF, без какого-либо усечения. Такой уровень шумов аналогичен клинической PET всего тела после устранения случайных помех и рассеяния. Из полных проекций с шумами создаются три размера усеченных проекций ROI (1 пиксель, 36 мм и 144 мм, с центрированием относительно патологического изменения), которые содержат суммарные количества счетных импульсов 16К, 62К и 160К, соответственно. На фигуре 5 представлены зависимости RMSE для режимов TOF и без TOF от числа итераций и подмножеств для локальных ROI с размерами 1 пиксель 402, 36 мм 404 и 144 мм 406, где в алгоритме ROI-OS-EM используют 12 подмножеств и 8 итераций. Тенденция аналогична случаю отсутствия шумов. В режиме TOF достигается меньшая RMSE для ROI, чем в режиме без TOF. Для 144 мм ROI 406, при большом числе итераций, RMSE в режимах как TOF, так и без TOF возрастает вследствие усиления шумов, что очень похоже на метод OS-EM для полных данных.
Для визуального сравнения реконструкции в режимах TOF и без TOF формировали для усеченных данных проекций 144 мм ROI и сравнивали для реконструкций в режимах TOF и без TOF, сформированных на основе полных данных проекции, при 8 подмножествах и 2 итерациях. Реконструкции в режимах TOF и без TOF объединяли с полными данными посредством замены ROI объекта на основе полных данных на ROI объекта на основе усеченных данных. В сравнении с усеченной ROI в режиме без TOF, усеченная ROI в режиме TOF лучше сочеталась с изображением на основе полных данных, тогда как в усеченной ROI в режиме без TOF наблюдались заметные артефакты, при объединении с изображением на основе полных данных.
Для крупной локальной ROI, алгоритм ROI-OS-EM в режиме TOF реконструировал область за пределами ROI с достаточной точностью, тогда как реконструкция по алгоритму ROI-OS-EM в режиме без TOF была неточной.
Хотя обе реконструкции в режимах TOF и без TOF могут обеспечивать полезную информацию, характеристика реконструкции в режиме TOF обычно получалась выше характеристики реконструкции в режиме без TOF. Например, реконструкция в режиме TOF характеризуется более приемлемой RMSE для ROI, чем реконструкция в режиме без TOF в обоих случаях отсутствия и присутствия шумов. В условиях моделирования реконструкция в режиме TOF формировала однопиксельную ROI, а реконструкция в режиме без TOF не формировала. Реконструированная ROI на основе усеченной реконструкции в режиме TOF также сочеталась лучше, чем в режиме без TOF, с изображением на основе полных данных.
Локальную томографию и, в частности, локальную томографию в режиме TOF в случае системы, которая обеспечивает TOF-данные, можно применять для ряда прикладных задач. Примеры содержат компенсацию локальных движений пациента, когда изображение небольшой ROI можно формировать по данным проекций, скорректированных на локальные движения, вместо реконструкции по полным наборам данных. Другой пример содержит восстановление данных пациента в случаях, когда участок объекта находится за пределами эффективного FOV сканера.
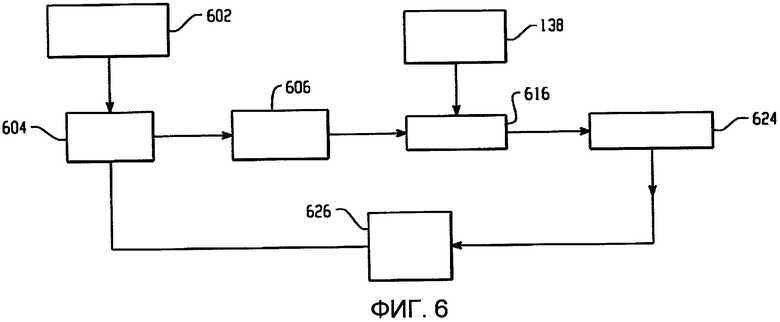
Ниже, со ссылкой на фигуру 6, описан один вариант осуществления блока 146 локальной реконструкции. Исходная оценка 602 объекта служит для определения исходной текущей оценки 604 объекта. Блок 606 формирования прямых проекций формирует прямые проекции текущей оценки 604 объекта для получения проекций оценки объекта для тех LOR, которые пересекают ROI. Блок 606 формирования прямых проекций может также применять другие требуемые модели и/или поправки, например, такие, которые предназначены для нормирования детектора, ослабления, случайных помех и рассеяния.
Компаратор 616 сравнивает проекции оценки объекта для данных проекций, полученных вдоль LOR, которые пересекают локальную ROI, и пространственно усеченные измеренные данные проекций, например, посредством определения отношения или разности между ними.
Блок 624 формирования обратных проекций формирует обратные проекции сравниваемых проекций.
Блок 626 обновления изображения использует данные обратных проекций для формирования новой оценки изображения. Следует отметить, что коррекция чувствительности по объекту выполняется с использованием таких проекций, которые пересекают ROI.
Обновленная оценка изображения становится текущей оценкой изображения, и процесс повторяется до тех пор, пока не выполняется условие завершения, например, для оптимизации целевой функции, например, функции уравнения 7. Следует отметить, что оптимизация выполняется по усеченным проекциям.
Когда блок 146 реконструкции выполняет реконструкцию по способу упорядоченных подмножеств, оценка объекта обновляется один раз для каждого подмножества, и одна итерация завершается после обхода каждого из подмножеств.
Следует отметить, что реконструкция не ограничена методом OS-EM и может выполняться с использованием других подходящих методов, например, ML-EM, RBI-EM или других способов максимального правдоподобия, RAMLA, CG или LMQN. Возможно также применение апостериорных способов максимизации с априорной информацией. Возможно также использование функции наименьших квадратов или другие функции оптимизации.
Следует отметить, что различные вышеописанные функции и, в частности, функции, выполняемые блоком 138 усечения проекций PET, идентификатором 140 локальной ROI, блоком 142 компенсации движения, блоками 144, 146 реконструкции, блоком 148 объединения изображений и процессором совмещения, обычно выполняются с использованием, по меньшей мере, компьютерного процессора. Машиночитаемые команды, которые предписывают процессору(ам) выполнять реконструкцию, содержатся на, по меньшей мере, одном машиночитаемом носителе информации, например, компьютерных дисках, в энергозависимой или энергонезависмой памяти или на чем-то подобном, к чему имеют доступ процессоры. Команды могут также передаваться по подходящей сети связи, например, сети Internet, на носители данных, доступные процессорам.
Далее работа дополнительно описана со ссылкой на фигуру 7.
Исследование объекта методом формирования изображения проводят на этапе 702. Когда исследование выполняют с использованием комбинированного PET/CT- или другого гибридного сканера, части исследования с помощью PET и гибридным средством обычно выполняют, по существу, одновременно. Однако следует понимать, что сканирования могут быть разделены во времени и/или пространстве. Исследование вторым средством может также отсутствовать. Следует отметить, что дополнительная обработка собранных данных проекций может выполняться в отсутствие объекта.
Данные из второго средства реконструируются на этапе 704, например, для получения пространственно изменяющихся данных ослабления объектом.
Локальная ROI идентифицируется на этапе 706. Когда информацию из PET или гибридной секции исследования методом формирования изображения используют для идентификации локальной ROI, то соответствующие данные проекций должны реконструироваться до идентификации ROI.
Данные проекций, собранные вдоль LOR, которые пересекают идентифицированную ROI, распознаются на этапе 708.
Распознанные данные проекций реконструируются на этапе 710 для формирования данных пространства изображения, характеризующих идентифицированную ROI и/или более крупный объект.
Компенсация движения идентифицированной ROI выполняется на этапе 712. Когда компенсация движения выполняется в пространстве проекций, компенсация движения будет обычно выполняться перед реконструкцией.
На этапе 714, реконструируемые изображения представляются в удобочитаемой форме. При желании, изображения идентифицированной ROI могут объединяться с другим(и) изображением(ями) объекта, например, путем их наложения или иного отображения в правильном положении относительно изображений, сформированных посредством одного из сканирований методом PET или вторым средством или обоими сканированиями.
Следует понимать, что порядок, в котором выполняются различные этапы, может изменяться, при необходимости.
Изобретение описано со ссылкой на предпочтительные варианты осуществления. Разумеется, специалистам, после прочтения и изучения предыдущего станут очевидными модификации и изменения. Предполагается, что изобретение следует интерпретировать как содержащее все упомянутые модификации и изменения, если они не выходят за пределы объема притязаний прилагаемой формулы изобретения.



Изобретение относится к области позитронной визуализации и реконструкции данных, собираемых в процессе позитронной эмиссионной томографии (PET). Техническим результатом выступает создание устройства и способа для позитронной эмиссионной томографии, собирающей данные проекций, вдоль линий срабатывания, которые пересекают идентифицированную представляющую интерес область, характеризующую позитронные аннигиляции в обследуемом объекте. В состав устройства входят: позитронный эмиссионный сканер (102), блок (146) итерационной локальной реконструкции, реконструирующий пространственно усеченные данные проекций, собранных вдоль линий срабатывания, которые пересекают подобласти объекта, чтобы сформировать данные пространства изображения, характеризующие объект и дополнительно содержит блок (606) формирования прямых проекций; блок (624) формирования обратных проекций, получаемых обратной проекцией, для обновления оценки изображения; также в состав устройства входит блок (142) компенсации движения компенсирует движение объекта; блок (148) объединения изображений объединяет данные пространства изображения с данными пространства другого изображения, характеризующими объект; машиночитаемый носитель информации, содержащий команды выполнения способа, идентификации представляющей интерес области объекта, пространственное усечение собранных данных проекций, при этом этап пространственного усечения включает идентификацию данных проекций, собранных вдоль линий срабатывания, пересекающих представляющую интерес область, выполнение итерационной локальной реконструкции пространственно усеченных данных, собранных при позитронном эмиссионном обследовании объекта. 3 н. и 11 з.п. ф-лы, 7 ил., 1 табл.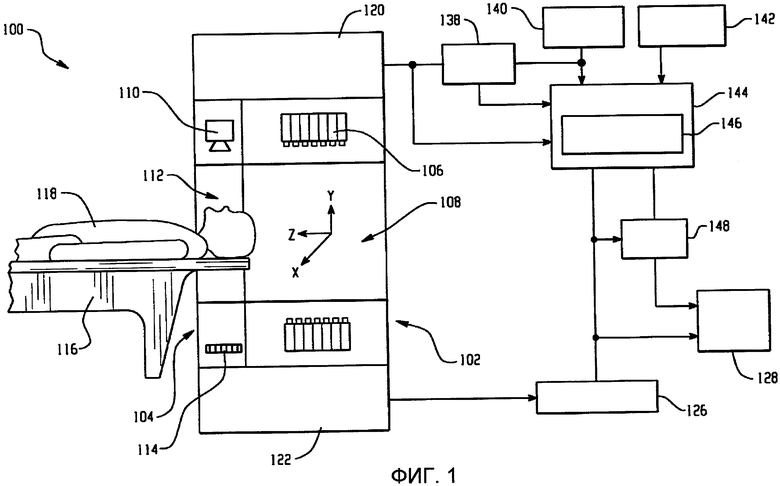
1. Способ позитронной эмиссионной локальной томографии, содержащий этапы, на которых:
идентифицируют представляющую интерес область объекта;
выполняют пространственное усечение собранных данных проекций;
при этом этап пространственного усечения содержит идентификацию данных проекций, собранных вдоль линий срабатывания, которые пересекают идентифицированную представляющую интерес область;
итерационно реконструируют пространственно усеченные данные проекций, характеризующие позитронные аннигиляции, происходящие в объекте, и собранные с использованием позитронного эмиссионного сканера, чтобы сформировать данные пространства первого изображения, характеризующие объект;
представляют данные пространства первого изображения в форме, воспринимаемой человеком.
2. Способ по п.1, в котором объект содержит сердце и этап идентификации представляющей интерес области содержит идентификацию такой внутренней области субъекта, как сердце или патологическое изменение.
3. Способ по п.1, в котором этап идентификации представляющей интерес области содержит использование процессора для идентификации представляющей интерес области на основе, по меньшей мере, частично априорных знаний о морфологии объекта.
4. Способ по п.1, в котором этап идентификации представляющей интерес области содержит идентификацию поперечного поля обзора сканера, использующего второй способ сканирования, применяемый для формирования данных пространства второго изображения, характеризующих объект.
5. Способ по п.1, в котором этап итерационной реконструкции содержит использование пространственно усеченных данных проекций для вычисления значения целевой функции.
6. Способ по п.1, содержащий этап, заключающийся в том, что применяют компенсацию движения к данным пространства первого изображения.
7. Способ по п.1, в котором собранные данные проекций содержат времяпролетные данные.
8. Устройство для позитронной эмиссионной томографии, содержащее:
позитронный эмиссионный сканер (102);
блок (146) итерационной локальной реконструкции, функционально связанный со сканером, при этом блок реконструкции реконструирует пространственно усеченные данные проекций, собранные вдоль линий срабатывания, которые пересекают поперечную подобласть объекта, чтобы формировать данные пространства первого изображения, характеризующие объект.
9. Устройство по п.8, содержащее:
средство для обнаружения движения объекта и
блок (142) компенсации движений, который компенсирует движение подобласти.
10. Устройство по п.8, содержащее блок (148) объединения изображений, который объединяет данные пространства первого изображения с данными пространства второго изображения, характеризующими объект, чтобы сформировать объединенное изображение объекта.
11. Устройство по п.8, в котором блок итерационной реконструкции содержит:
блок (606) формирования прямых проекций, который формирует прямые проекции оценки изображения для формирования данных проекций оценки изображения для множества линий срабатывания;
компаратор (616), который сравнивает данные проекций оценки изображения для линий срабатывания, которые пересекают представляющую интерес область, и усеченные данные проекций;
блок (624) формирования обратных проекций, который формирует обратные проекции сравниваемых проекций;
блок (626) обновления оценки изображения, который использует сравниваемые проекции, полученные обратной проекцией, для обновления оценки изображения.
12. Устройство по п.8, дополнительно содержащее:
блок пространственного усечения данных проекций, который (i) выбирает данные проекций, собранные вдоль линий срабатывания, которые пересекают представляющую интерес область объекта; или (ii) отклоняет измеренные данные проекций, собранные вдоль линий срабатывания, которые не пересекают представляющую интерес область.
13. Устройство по п.8, в котором собранные данные проекций содержат данные проекций, собранные с использованием времяпролетного позитронного эмиссионного сканера, имеющего поперечное поле обзора, которое меньше, чем поперечный размер объекта, и блок усечения проекций идентифицирует данные проекций, собранные вдоль линий срабатывания, которые пересекают поперечное поле обзора.
14. Машиночитаемый носитель информации, содержащий команды, которые, при исполнении компьютером, предписывают компьютеру выполнять способ, который содержит идентификацию представляющей интерес области объекта, пространственное усечение собранных данных проекций, при этом этап пространственного усечения содержит идентификацию данных проекций, собранных вдоль линий срабатывания, которые пересекают идентифицированную представляющую интерес область, выполнение итерационной локальной реконструкции пространственно усеченных данных проекций, собранных при позитронном эмиссионном обследовании объекта, чтобы формировать данные пространства первого изображения, характеризующие объект.
| US 20070010731 A1, 11.01.2007 | |||
| US 20050249432 A1, 10.11.2005 | |||
| US 20070040122 A1, 22.02.2007 | |||
| Затвор к оправам для сумок, табакерок и проч. | 1927 |
|
SU7669A1 |
| US 2004066911 A1, 08.04.2004. | |||

