Область техники, к которой относится изобретение
Настоящее изобретение относится способу предоставления оперативной информации водителю транспортного средства. Термин "транспортное средство" означает любое средство наземного, водного или воздушного транспорта. Далее изобретение будет описано применительно к рабочей машине в виде колесного погрузчика. Это следует считать предпочтительным, не ограничивающим применением изобретения. Более точно, следует отметить, что изобретение также применимо в других колесных транспортных средствах, таких как грузовые автомобили, автобусы и легковые автомобили.
Термин "рабочая машина" означает погрузочно-разгрузочные транспортные средства различных типов, такие как строительные машины, например колесный погрузчик и грузовой автомобиль-самосвал (такой как самосвал с шарнирно сочлененной рамой). Рабочая машина имеет ковш, кузов или рабочее оборудование другого типа для переноса/транспортировки груза. Кроме того, для обозначения рабочих машин часто применяют такие термины, как "землеройно-транспортные машины", "внедорожные рабочие машины" и "строительное оборудование".
Рабочие машины часто используют для транспортировки тяжелых грузов, например, при выполнении подрядных работ. Рабочая машина может использоваться для работы с габаритными и тяжелыми грузами в районах бездорожья, например, для их перевозки при строительстве дорог или туннелей, на песчаных карьерах, шахтах и в аналогичных условиях. При движении по неровному грунту и подъеме/перевозке грузов различных типов водитель (или оператор) рабочей машины испытывает воздействие рывков и вибраций в процессе работы. Такие нагрузки могут вызывать усталость и (или) снижение работоспособности. В связи с этим важно создать в кабине оператора оптимальные с эргономической точки зрения условия, чтобы оператор мог эффективно управлять рабочей машиной.
Колесный погрузчик имеет привод для приведения машины в движение посредством колес. Для приведения в движение колесного погрузчика служит источник энергии, такой как двигатель внутреннего сгорания, в частности дизельный двигатель. В кабине находится множество управляемых оператором элементов для управления приводом, таких как педаль акселератора, переключатель передач, педаль тормоза, устройство блокировки дифференциала и приборная панель с множеством кнопок для приведения в действие различных функций, таких как автоматическое включение понижающей передачи, выбор режима переключения передач и т.д.
Кроме того, колесный погрузчик имеет гидравлическую систему для выполнения некоторых рабочих функций, таких как подъем и наклон рабочего оборудования и рулевое управление машиной. Источник энергии также способен обеспечивать мощность для управления рабочими функциями гидравлической системы. Более точно, источник энергии приводит в действие один или несколько гидравлических насосов для подачи гидравлической жидкости под давлением в гидравлические приводы (такие как гидравлические цилиндры). В кабине находится множество управляемых оператором элементов для управления гидравлической системой, таких как рычаг подъема, рычаг наклона, рулевой рычаг и приборная панель с множеством кнопок для приведения в действие различных функций, таких как подвеска стрелы, изменение положения ковша и плавающее положение.
Современные рабочие машины отличаются высокой сложностью и имеют множество функций, которыми может пользоваться оператор для эффективного управления рабочей машиной. В частности, в кабине становится все больше управляемых оператором элементов (рычагов, кнопок и других органов управления). В связи с этим желательно разработать систему или способ, который обеспечит условия для более совершенного использования всех доступных возможностей и тем самым более эффективного управления рабочей машиной. В частности, желательно дополнительно усовершенствовать управление машиной опытными операторами. Кроме того, поскольку рабочими машинами часто управляют неопытные операторы, также желательна система или способ, который обеспечит условия для повышения эффективности работы неопытных операторов.
Краткое изложение сущности изобретения
В основу изобретения положена задача создания способа, обеспечивающего условия для повышения эффективности работы. В частности, в изобретении предложен способ предоставления оперативной информации оператору транспортного средства, позволяющий оператору легко и эффективно с точки зрения затрат времени обучаться эффективному управлению транспортным средством.
Эта задача решена с помощью способа по п.1 формулы изобретения. Соответственно, в изобретении предложен способ обеспечения оперативной информацией водителя транспортного средства, в котором обеспечивают по меньшей мере одну заданную демонстрацию оперативной информации, причем определяют, желательно ли воспроизведение для водителя одной из упомянутых по меньшей мере одной заданной демонстрации, и, если это желательно, автоматически воспроизводят для водителя демонстрацию в отсеке водителя транспортного средства, когда водитель находится на рабочем месте.
Таким образом, демонстрацию индивидуально воспроизводят для водителей, когда они находятся на транспортном средстве. Следовательно, предложено обучение в процессе нахождения на рабочем месте, обеспечивающее условия для сокращения затрат и времени, необходимых для проведения общих курсов обучения водителей. Кроме того, способ обеспечивает условия, позволяющие каждому отдельному водителю при желании повторять демонстрацию или ее части.
В одном из предпочтительных вариантов осуществления оперативная информация содержит информацию о рабочей среде (оператора) в отсеке водителя, такую как информация о доступных эргономических корректировках формы сиденья, подлокотников, колонки рулевого управления и т.д. Демонстрация предпочтительно представляет собой обучение заданному набору доступных корректировок рабочей среды в отсеке водителя.
В одном из дополнительных предпочтительных вариантов осуществления оперативная информация содержит рекомендации об изменениях поведения и (или) положения водителя на протяжении рабочей смены. Этим способом снижается риск травматизма вследствие повторяющихся нагрузок и нарушений опорно-двигательного аппарата. Рекомендации могут касаться использования ремня безопасности, изменения рабочей позы, коротких перерывов для разминки и т.д.
В одном из дополнительных предпочтительных вариантов осуществления оперативная информация содержит информацию об управляемых оператором элементах в отсеке водителя для управления транспортным средством. В такие управляемые оператором элементы могут входить средство управления приводом, средство управления гидравлической системой и средство управления тормозной системой. Оперативная информация представляет собой обучающую демонстрацию заданного набора (т.е. необязательно всех) управляемых оператором элементов. Оперативная информация предпочтительно содержит информацию о функции и (или) оптимальном использовании каждого из управляемых оператором элементов.
В процессе работы взаимодействуют несколько систем рабочей машины. Например, двигатель рассчитан на подачу мощности как для приведения в движение машины посредством колес, так и в гидравлическую систему для выполнения различных рабочих функций. Для управления рабочим оборудованием колесного погрузчика требуется значительная мощность, что может приводить к остановке двигателя при одновременной нагрузке на привод. В связи с этим важно, чтобы различные системы использовались уравновешенно по отношению друг к другу. Ввиду этого оперативная информация предпочтительно содержит указания, касающиеся того, как использовать управляемые оператором элементы, чтобы повысить эффективность общего использования машины.
В связи с этим в одном из предпочтительных вариантов осуществления оперативная информация содержит информацию об управлении рабочим оборудованием. Рабочим оборудованием может, например, являться ковш (для перемещения грунта или гравия), вилочные захваты (для транспортировки грузов на поддонах) или грейферные захваты (для погрузки бревен). Более точно, гидравлическая система рабочей машины обычного типа способна управлять рабочим оборудованием. Таким образом, в одном из дополнительных вариантов осуществления оперативная информация содержит информацию об управлении гидравлической системой, которая оперативно соединена с рабочим оборудованием.
В одном из предпочтительных вариантов осуществления демонстрация содержит визуальную информацию, отображаемую для водителя. Визуальная информация отображается, например, на экране в отсеке водителя. Демонстрация предпочтительно содержит звуковую информацию, такую как автоматизированная речевая информация.
В одном из предпочтительных вариантов осуществления способ включает стадию, на которой на основании поступающей от водителя информации, которая может быть передана путем ввода оператором данных в виде кода, карты или аналогичным способом или автоматически, когда водителя распознает, например, камера, определяют, желательно ли воспроизведение для водителя одной из упомянутых по меньшей мере одной заданной демонстрации. Таким образом, воспроизводимая демонстрация может быть адаптирована к потребностям конкретного водителя с учетом его квалификации и т.д. и, возможно, к выполнению конкретной рабочей задачи.
В одном из предпочтительных вариантов осуществления способ включает стадию, на которой идентифицируют водителя, по результатам идентификации водителя определяют, желательна ли демонстрация оперативной информации, и автоматически осуществляют упомянутую демонстрацию, если установлена ее желательность. Идентификация может заключаться в том, что водитель вводит данные в виде кода, карты или аналогичным образом или может осуществляться автоматически, когда водителя распознает, например, камера. Кроме того, согласно одному из примеров демонстрацию инициируют только при условии, что водитель впервые управляет транспортным средством.
Другие выгодные признаки и функции различных вариантов осуществления изложены в следующем далее описании и зависимых пунктах.
Краткое описание чертежей
Далее изобретение будет пояснено со ссылкой на варианты осуществления, проиллюстрированные на прилагаемых чертежах, на которых:
на фиг.1 схематически показан вид сбоку колесного погрузчика,
на фиг.2 схематически показан обычный привод и обычная гидравлическая система колесного погрузчика,
на фиг.3 показана система управления,
на фиг.4 и 5 показаны два примера блок-схем способа обучения водителя,
на фиг.6 показана рабочая среда,
на фиг.7-10 показаны возможности регулировки сиденья водителя и
на фиг.11 показан дополнительный пример блок-схемы способа обучения водителя.
Осуществление изобретения
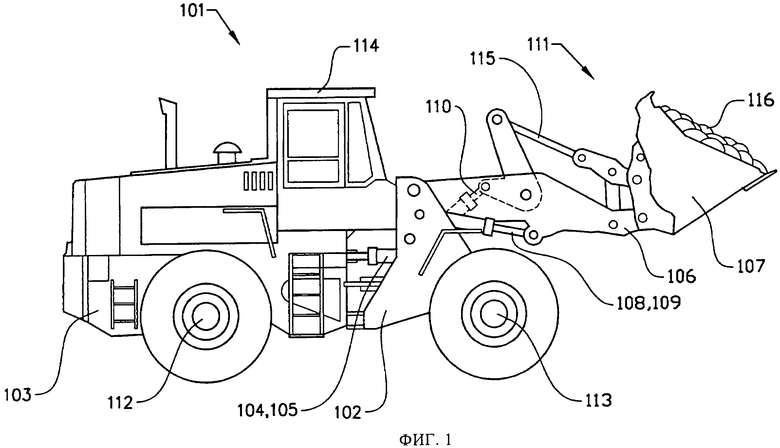
На фиг.1 показана шарнирно-сочлененная рабочая машина, представляющая собой колесный погрузчик 101. Корпус колесного погрузчика 101 имеет передний отсек 102 и задний отсек 103, каждый из которых имеет ось 112, 113 для приведения в движение контактирующих с землей элементов в виде пары колес. Задний отсек 103 корпуса содержит кабину 114. Отсеки 102, 103 корпуса соединены друг с другом таким образом, что они способны поворачиваться относительно друг друга вокруг вертикальной оси с помощью двух первых исполнительных механизмов в виде гидравлических цилиндров 104, 105, расположенных между отсеками. Таким образом, с каждой стороны горизонтальной осевой линии транспортного средства, проходящей в направлении его движения, расположено по одному гидравлическому цилиндру 104, 105 для поворота колесного погрузчика 101.
Колесный погрузчик 101 имеет оборудование 111 для погрузки и разгрузки грузов или материала. Оборудование 111 содержит загрузочную руку 106 и приспособление 107 в виде ковша, посаженного на загрузочную руку. Первый конец загрузочной руки 106 поворотно соединен с передним отсеком 102 транспортного средства. Приспособление 107 поворотно соединено со вторым концом загрузочной руки 106.
Загрузочная рука 106 способна подниматься и опускаться относительно переднего отсека 102 транспортного средства посредством двух вторых исполнительных механизмов в виде двух гидравлических цилиндров 108, 109, один конец каждого из которых соединен с передним отсеком 102 транспортного средства, а другой конец соединен с загрузочной рукой 106. Ковш 107 способен наклоняться относительно загрузочной руки 106 посредством третьего исполнительного механизма в виде гидравлического цилиндра 110, один конец которого соединен с передним отсеком 102 транспортного средства, а другой конец соединен с ковшом 107 посредством системы 115 раскоса тяг.
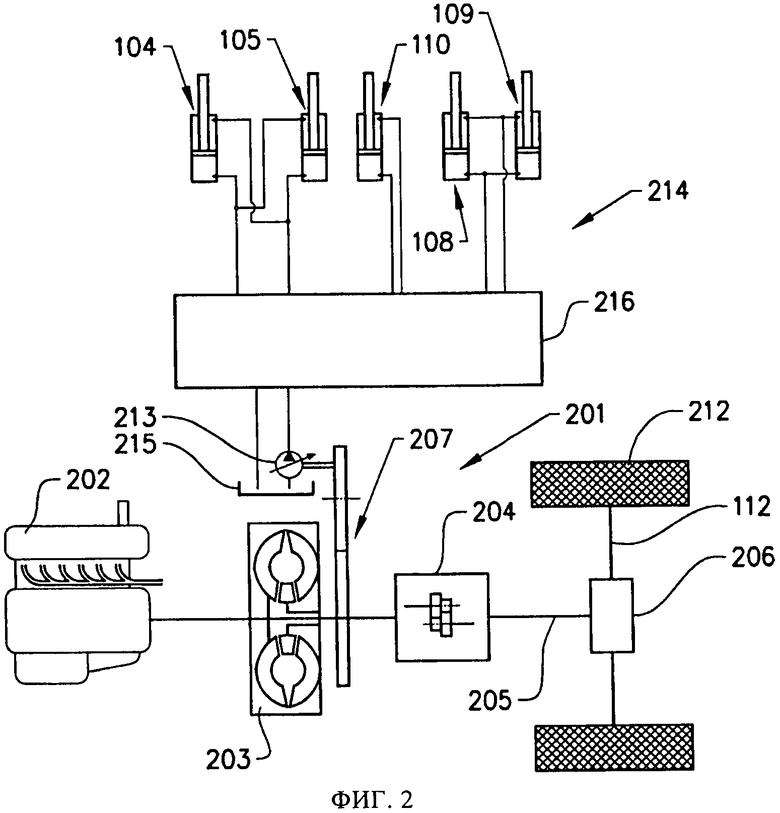
На фиг.2 схематически показан обычный привод 201 и обычная гидравлическая система 214. Привод 201 содержит источник 202 энергии (первичный двигатель) в виде двигателя внутреннего сгорания и трансмиссию для передачи мощности от двигателя 202 на колеса 212 для приведения в движение колесного погрузчика. Двигателем 202 предпочтительно является дизельный двигатель. Привод 201 является приводом механического типа и содержит следующие элементы, начиная с двигателя 202 и заканчивая колесами 212: блок 203 трансмиссии в виде преобразователя крутящего момента, коробку 204 передач, карданный вал 205, дифференциальную передачу 206 и поперечные полуоси 112. Коробка передач рассчитана на изменение скорости движения транспортного средства и выбор между движением колесного погрузчика 101 вперед и в обратном направлении.
Преобразователь 203 крутящего момента способен увеличивать крутящий момент, что значит, что крутящий момент на выходе преобразователя крутящего момента может, например, в 1-3 раза превышать крутящий момент двигателя 202 внутреннего сгорания. Кроме того, преобразователь крутящего момента предпочтительно имеет функцию свободного хода и функцию блокировки для работы в режиме прямой передачи без увеличения крутящего момента. Следовательно, в блокированном состоянии преобразователь крутящего момента имеет фиксированное передаточное отношение, предпочтительно преимущественно 1:1. Тем не менее, в одном из альтернативных вариантов осуществления блок 203 трансмиссии может представлять собой обычное сцепление, которое выключается или работает в режиме прямой передачи без увеличения крутящего момента. Таким сцеплением может являться гидравлическая муфта, а также механическая муфта, такая как предохранительная фрикционная муфта с переменным пределом регулирования.
Двигатель 202 способен подавать тяговую мощность для приведения в движение транспортного средства и для оперативного приведения в действие по меньшей мере одного насоса 213 переменного объема в гидравлической системе 214 для осуществления операций подъема и рулевого управления колесным погрузчиком 101. Гидравлический насос 213 приводится в действие двигателем 202 внутреннего сгорания предпочтительно посредством зубчатых колес 207, расположенных между преобразователем 203 крутящего момента и коробкой 204 передач.
Насос 213 рассчитан на подачу гидравлической жидкости под давлением из бака 215 в цилиндры 104, 105, 108, 109, 110. Между насосом 213 и цилиндрами 104, 105, 108, 109, 110 расположено несколько гидравлически соединенных клапанных узлов с электронным управлением для регулирования возвратно-поступательного движения цилиндров. Система гидравлических клапанных узлов для простоты обозначена одной позицией 216.
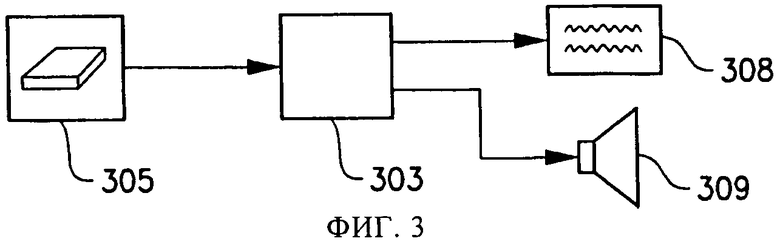
На фиг.3 показан первый пример варианта осуществления системы 301 управления для осуществления предложенного способа в колесном погрузчике 101. Система 301 управления содержит блок 303 управления с программным обеспечением для обработки информации.
Система управления имеет средство 305 для ввода данных водителем, т.е. человеко-машинный интерфейс. Средство 305 для ввода данных водителем представляет собой средство, в которое вставляют карту и (или) средство для ввода кода, такое как клавиатура. Средство 305 для ввода данных оперативно соединено с блоком 303 управления для передачи введенных данных блоку управления. Блок 303 управления способен идентифицировать водителя на основании введенных им данных. Блок 303 управления дополнительно содержит средство для принятия решений, определяющее, следует ли автоматически воспроизводить демонстрацию водителю. Блок 303 управления может содержать множество различных демонстраций и быть рассчитан на выбор конкретной демонстрации в зависимости от принятых от водителя данных/запроса. Например, определяют уровень квалификации идентифицированного водителя и в зависимости от него выбирают соответствующую демонстрацию. С блоком 303 управления оперативно соединено средство 307 воспроизведения. Блок 303 управления передает выбранную демонстрацию средству 307 воспроизведения, которое в свою очередь воспроизводит ее для водителя. Средство 307 воспроизведения может представлять собой средство 308 отображения и (или) звуковое средство 309, такое как громкоговоритель. Средство 308 отображения может представлять собой отдельный экран на приборной панели транспортного средства и (или) индикатор на ветровом стекле для проецирования виртуального изображения с приборной панели на ветровое стекло.
Блок 303 управления в целом известен как электронный блок управления, центральный процессор или электронный модуль управления для электронного управления работой транспортного средства. В одном из предпочтительных вариантов осуществления блок управления представляет собой микропроцессор. Блок 303 управления имеет память, в которой хранится состоящая из сегментов компьютерная программа или программный код для реализации способа управления при выполнении программы. Таким образом, демонстрация(и) хранится в памяти. Блок управления рассчитан на выполнение программы и тем самым воспроизведение демонстрации или любой ее части для водителя. Эта компьютерная программа может быть передана блоку управления различными способами посредством передаваемого сигнала, например путем загрузки с другого компьютера, по проводам и (или) без проводов или путем установки в запоминающей схеме. Передаваемый сигнал может, в частности, передаваться посредством сети Интернет.
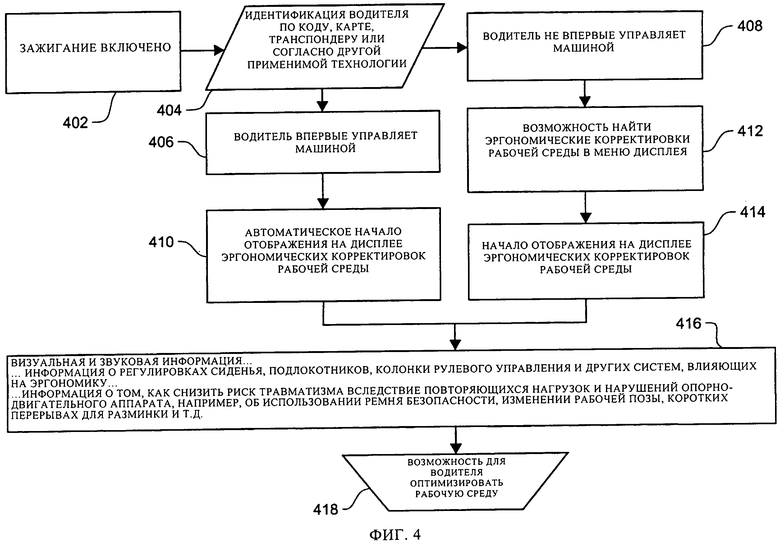
На фиг.4 показана блок-схема демонстрации водителю эргономических корректировок рабочей среды. На первом шаге 402 определяют, что зажигание включено. На втором шаге 404 идентифицируют водителя посредством кода, карты, транспондера или иным способом. Кроме того, определяют, впервые ли водитель управляет конкретным транспортным средством (шаги 406, 408). Если это так, автоматически воспроизводят демонстрацию в форме рекомендаций по эргономическим корректировкам рабочей среды (шаг 410).
В качестве альтернативы, если водитель управляет транспортным средством не в первый раз, эргономические рекомендации не будут воспроизводиться автоматически. Вместо этого рекомендации по эргономическим корректировкам рабочей среды будут доступны для водителя, который может решить, желательны ли они (на шаге 412). Рекомендации по эргономическим корректировкам рабочей среды воспроизводятся, если их запросит водитель (на шаге 414).
На шаге 416 для водителя воспроизводят рекомендации по эргономическим корректировкам рабочей среды. Они содержат информацию о регулировках сиденья, подлокотников, колонки рулевого управления и т.д. Кроме того, они содержат информацию о пользовании ремнем безопасности, изменении рабочей позы, коротких перерывах для разминки и т.д.
Как показано на шаге 418, водитель вручную оптимизирует рабочую среду в соответствии с предоставленными рекомендациями.
На фиг.5 показана блок-схема воспроизведения обучающей демонстрации органов управления и функций для водителя. На первом шаге 502 определяют, что зажигание включено. На втором шаге 504, идентифицируют водителя посредством кода, карты, транспондера или иным способом. Кроме того, определяют, впервые ли водитель управляет конкретным транспортным средством (шаги 506, 508). Если это так, автоматически воспроизводят обучающую демонстрацию органов управления и функций (шаг 510).
В качестве альтернативы, если водитель управляет транспортным средством не в первый раз, обучающая демонстрация органов управления и функций не будет воспроизводиться автоматически. Вместо этого обучающая демонстрация органов управления и функций будет доступна для водителя, который может решить, желательна ли она (на шаге 512). Обучающая демонстрация воспроизводится, если ее запросит водитель (на шаге 514).
На шаге 516 для водителя воспроизводят обучающую демонстрацию органов управления и функций. Она содержит информацию о средствах управления и их функциях. Кроме того, она содержит информацию о том, как оптимизировать использование функций; когда и как пользоваться ими.
Как показано на шаге 518, водитель вручную оптимизирует использование и производительность машины в соответствии с предоставленными рекомендациями.
Согласно одному из дополнительных усовершенствований способ включает стадию, на которой контролируют использование машины в процессе работы, и по истечении определенного времени, например рабочего цикла, рабочей смены, заданного периода времени и т.д., воспроизводят для водителя информацию обратной связи об использовании им машины. Этим способом можно дополнительно оптимизировать использование.
Согласно одному из дополнительных усовершенствований способ включает стадию, на которой определяют, находится ли транспортное средство в нерабочем состоянии, и автоматически воспроизводят демонстрацию для водителя, только если транспортное средство находится в нерабочем состоянии. Нерабочим состоянием является состояние, в котором транспортное средство стоит на месте. Кроме того, способ может быть рассчитан на прерывание демонстрации, если состояние транспортного средства изменяется на рабочее состояние.
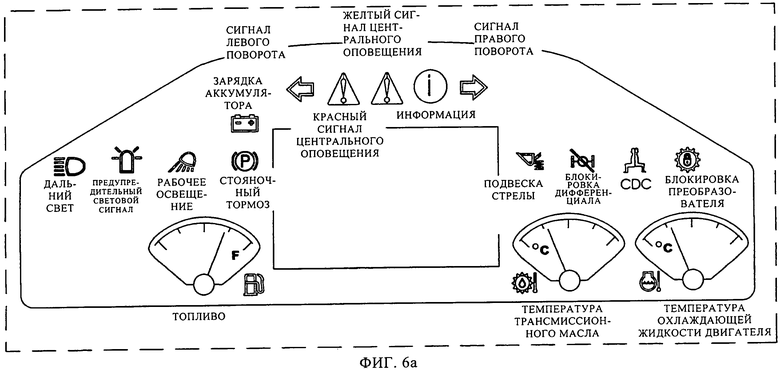
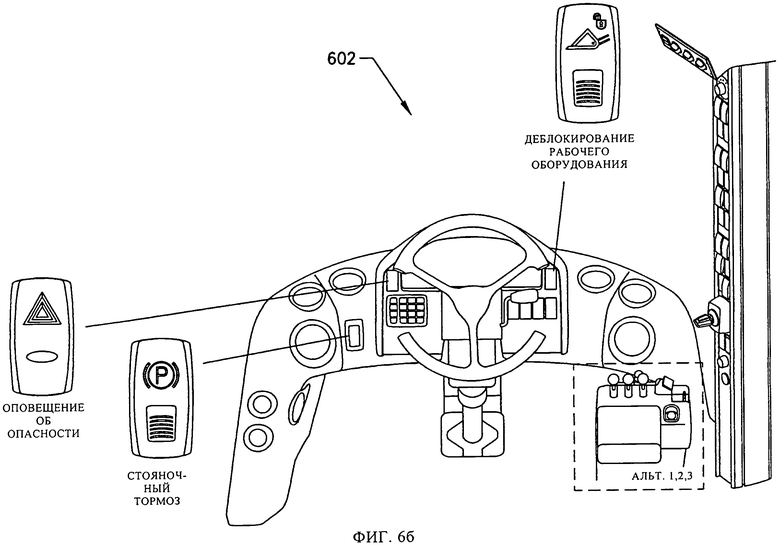
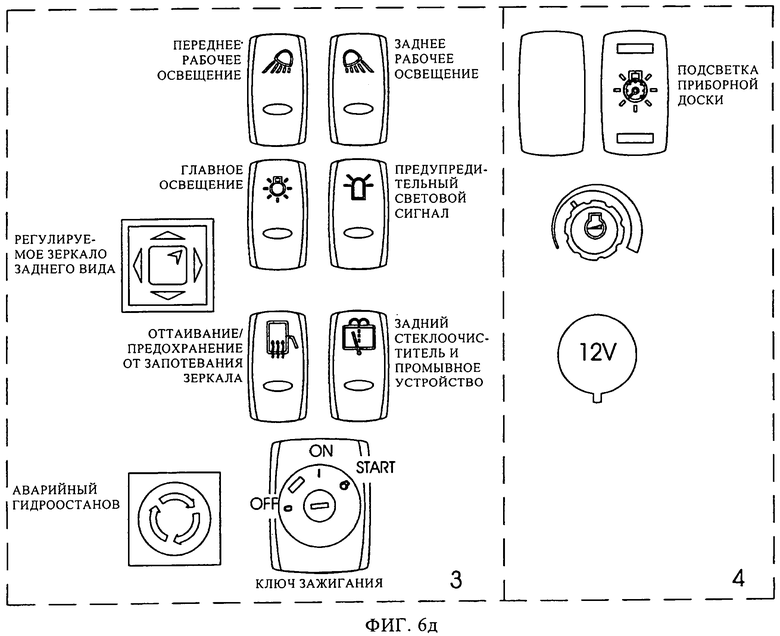
На фиг.6 показан один из примеров рабочей среды 602 в кабине колесного погрузчика 101. Показано множество управляемых оператором элементов (рычагов, кнопок и других органов управления). Воспроизведение заданной демонстрации оперативной информации является особо важным в такой рабочей машине для дополнительного повышения эффективности ее работы.
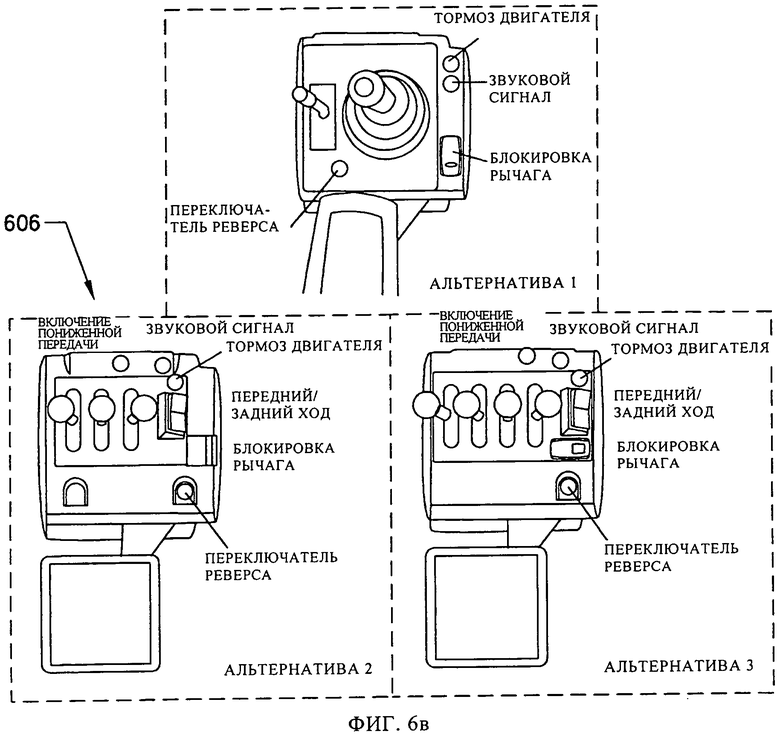
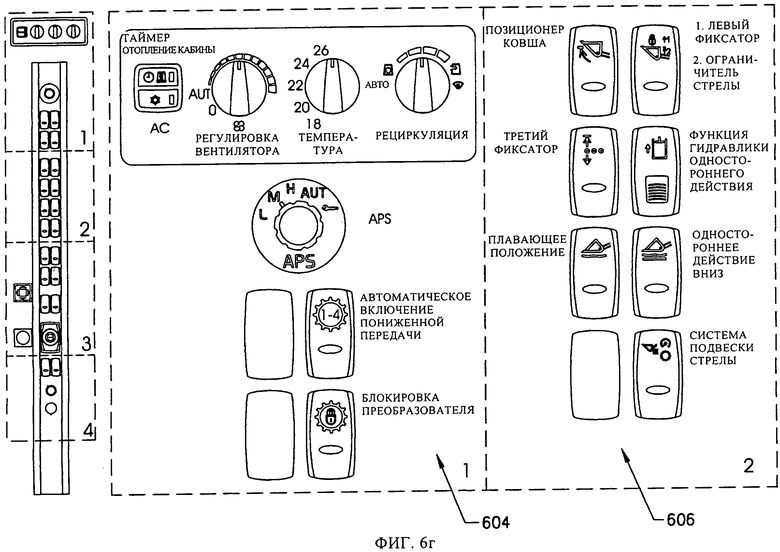
В частности, первый набор 604 органов управления (в виде нажимных кнопок и вращающейся ручки) служит для выбора различных функций привода. Второй набор 606 органов управления служит для управления рабочим оборудованием и подъемным рычагом посредством гидравлической системы. Второй набор содержит множество нажимных кнопок выбора различных функций и по меньшей мере один рычаг или рукоятку управления (альтернативы 1, 2 и 3) для ручного маневрирования рабочим оборудованием и подъемным рычагом посредством гидравлической системы. Согласно альтернативам 2 и 3 предусмотрено множество рычагов, включающих рычаг подъема, рычаг наклона и рычаг для управления третьей функцией.
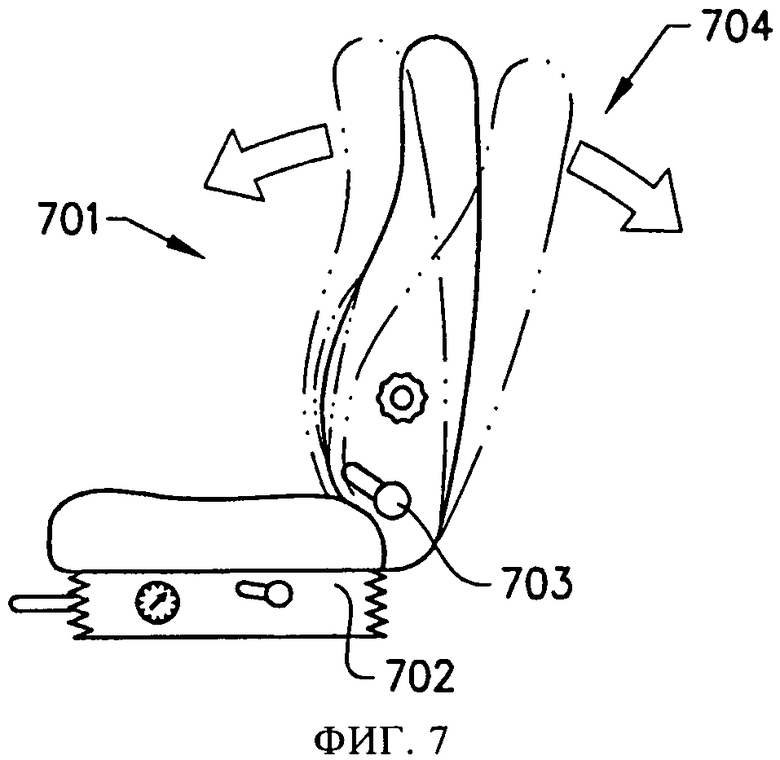
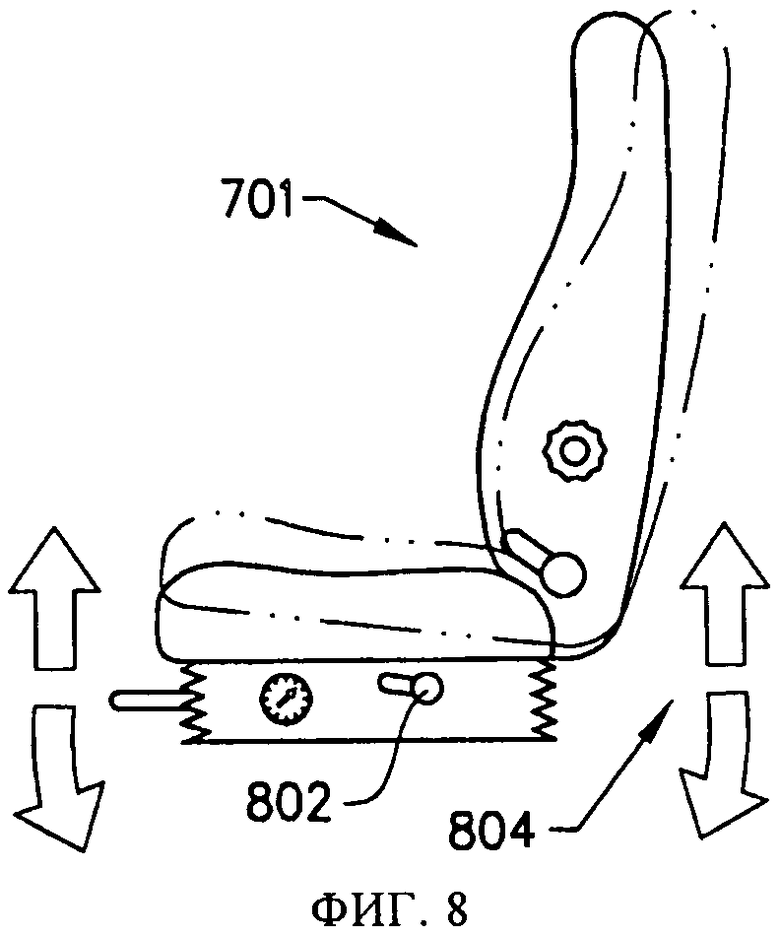
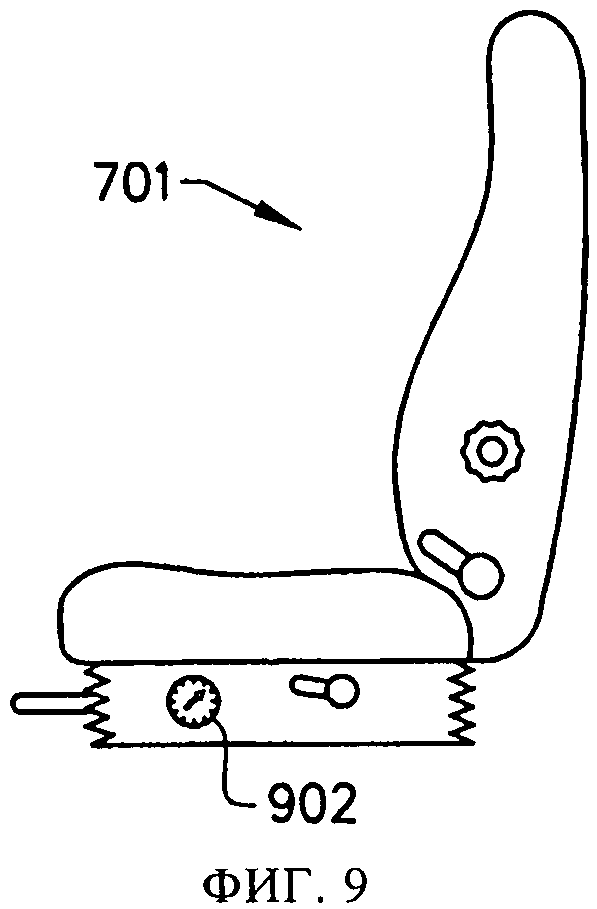
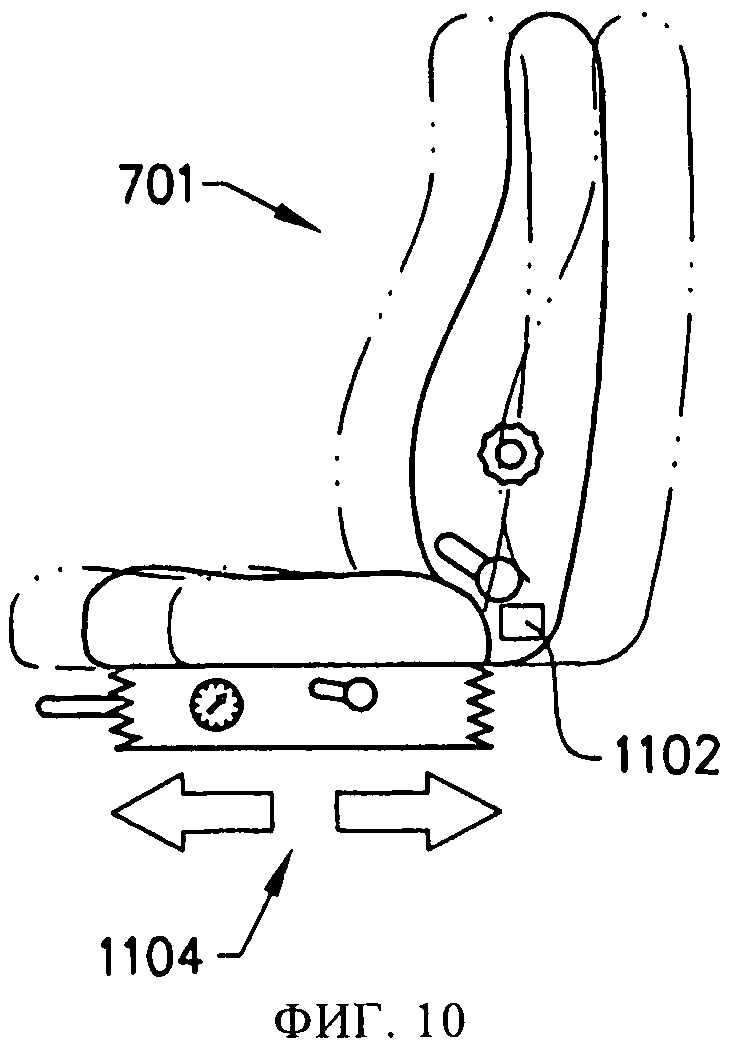
Помимо всех управляемых оператором элементов управления рабочей машиной (фиг.6) предусмотрены возможности регулировки сиденья водителя 701 (фиг.7-10). Важно, что чтобы каждый отдельный водитель регулировал сиденье для обеспечения эффективной работы (во избежание усталости и возможных телесных повреждений).
На фиг.7 показана возможность отклонения спинки сидения назад и вперед (по стрелкам 704) с помощью средства (рукоятки) 702 регулировки сидения и поясничной опоры 703 (путем поворота ручки). На фиг.8 показана возможность регулировки наклона сиденья относительно горизонтальной оси, проходящей поперечно направлению движения (по стрелкам 804) с помощью второго средства (рукояток) 802 регулирования сиденья и подъема/опускания сиденья. На фиг.9 показано средство (ручка весовой регулировки) 902 подгонки веса водителя. На фиг.10 показана возможность регулировки положения сиденья назад и вперед для обеспечения пространства для ног (по стрелкам 1004) с помощью дополнительного средства 1002 (штанги) регулировки сиденья.
На фиг.11 показан один из дополнительных примеров блок-схемы предоставления оперативной информации водителю транспортного средства. На первом шаге 1102 принимают информацию, идентифицирующую водителя. На втором шаге 1104 на основании идентификационной информации водителя определяют, желательна ли (или требуется ли) демонстрация оперативной информации. Если установлено, что демонстрация желательна/требуется, переходят к шагу 1106, на котором на основании идентификационной информации водителя выбирают демонстрацию из набора доступных демонстраций. Затем на шаге 1108 для водителя воспроизводят выбранную демонстрацию в отсеке водителя, когда водитель находится на рабочем месте (обычно сидит). Если на шаге 1104 установлено, что демонстрация не требуется, для водителя не воспроизводят демонстрацию. Процесс возобновляется на шаге 1102, когда во время следующей рабочей смены будет идентифицирован следующий водитель.
Изобретение ни коей мере не ограничено описанными выше вариантами осуществления, и в нем может быть предусмотрен ряд альтернатив и усовершенствований, не выходящих за пределы объема следующей далее формулы изобретения.
В качестве альтернативы шагу, на котором определяют, впервые ли водитель управляет конкретным транспортным средством, может быть определено, впервые ли это происходит на протяжении определенного периода времени, такого как месяц или год, при этом упомянутую демонстрацию автоматически воспроизводят, только если это происходит впервые на протяжении конкретного периода времени.
Кроме того, в качестве альтернативы шагу, на котором определяют, впервые ли водитель управляет конкретным транспортным средством, может быть достаточным определить, впервые ли он управляет транспортным средством конкретного типа или модели.
В качестве альтернативы или в дополнение к приему от водителя данных, таких как карта или код для идентификации водителя используют систему автоматического распознавания. Такая система автоматического распознавания содержит устройство для воспроизведения изображений, такое как камера для воспроизведения изображения водителя и средство для анализа изображения в том, что касается, например, формы лица и (или) особенностей глаз водителя и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ ИНСТРУКЦИЯМИ ПО ЭКСПЛУАТАЦИИ ВОДИТЕЛЯ РАБОЧЕЙ МАШИНЫ | 2008 |
|
RU2488663C2 |
| Учебно-тренировочный комплекс подготовки операторов береговых комплексов | 2020 |
|
RU2760601C1 |
| Тренажер водителя транспортного средства | 1976 |
|
SU595767A1 |
| СПОСОБ УПРАВЛЕНИЯ МУЛЬТИМЕДИЙНОЙ СИСТЕМОЙ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА, МУЛЬТИМЕДИЙНАЯ СИСТЕМА МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА И МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, СОДЕРЖАЩЕЕ ТАКУЮ СИСТЕМУ | 2016 |
|
RU2721631C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЛЕСОТЕХНИЧЕСКОЙ МАШИНОЙ | 2010 |
|
RU2628587C2 |
| СПОСОБ, ИСПОЛЬЗУЮЩИЙ ОПОЗНАВАНИЕ ВОЗДЕЙСТВИЯ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ПАРКАМИ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2561482C2 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| АВТОБУСНЫЙ ТРЕНАЖЕР | 2011 |
|
RU2467400C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО ПОДЪЕМА ПО ЛЕСТНИЧНЫМ МАРШАМ | 2001 |
|
RU2215510C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2014 |
|
RU2673497C2 |

Изобретение относится к способу предоставления оперативной информации водителю транспортного средства. Способ обеспечивает условия для повышения эффективности работы, в частности позволяет оператору легко и эффективно с точки зрения затрат времени обучаться эффективному управлению транспортным средством. Способ обеспечения оперативной информацией водителя транспортного средства, включающий шаги, на которых обеспечивают, по меньшей мере, одну заданную демонстрацию оперативной информации. Определяют, желательно ли воспроизведение для водителя одной из этих демонстраций, и, если это желательно, автоматически воспроизводят для водителя демонстрацию в отсеке водителя транспортного средства, когда водитель находится на рабочем месте. 30 з.п. ф-лы, 15 ил.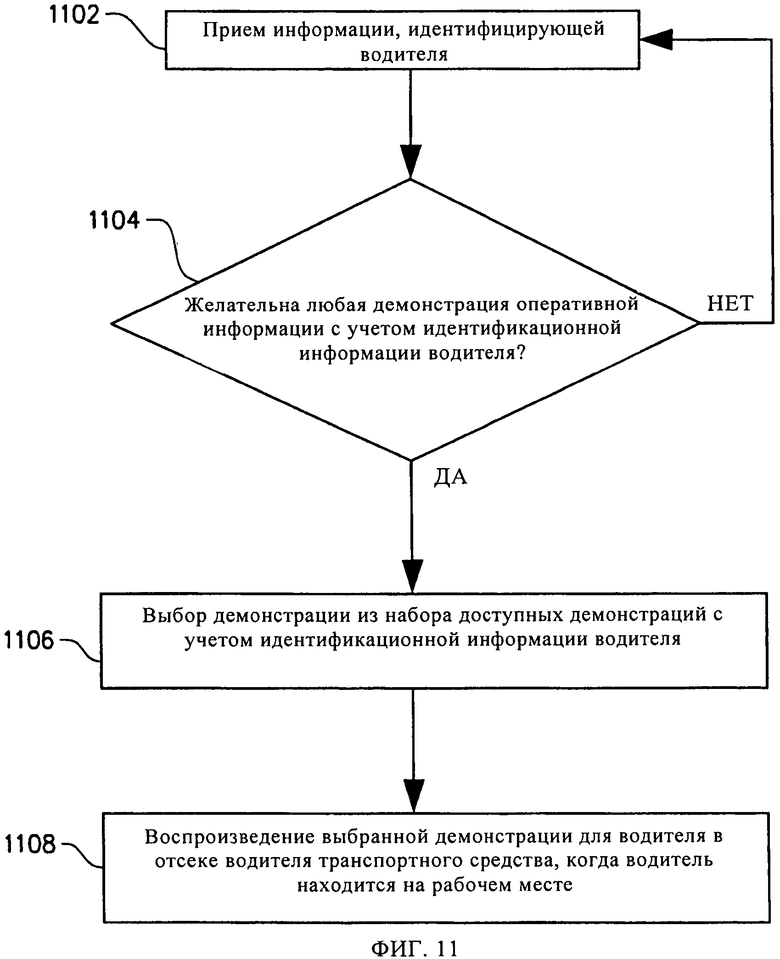
1. Способ обеспечения оперативной информацией водителя транспортного средства, включающий шаги, на которых обеспечивают по меньшей мере одну заданную демонстрацию оперативной информации, определяют, желательно ли воспроизведение для водителя одной из этих демонстраций, и, если это желательно, автоматически воспроизводят для водителя демонстрацию в отсеке водителя транспортного средства, когда водитель находится на рабочем месте.
2. Способ по п.1, в котором демонстрация содержит визуальную информацию.
3. Способ по п.2, включающий шаг, на котором воспроизводят визуальную информацию на экране в отсеке водителя.
4. Способ по п.1, в котором демонстрация содержит звуковую информацию.
5. Способ по п.1, в котором на основании информации о водителе определяют, желательно ли воспроизведение для него одной из упомянутых демонстраций.
6. Способ по любому из пп.1-5, в котором на основании введенных водителем данных определяют, желательно ли воспроизведение для него одной из упомянутых демонстраций.
7. Способ по любому из пп.1-5, в котором идентифицируют водителя, по результатам этой идентификации определяют, желательна ли демонстрация оперативной информации, и автоматически осуществляют упомянутую демонстрацию, если установлена ее желательность.
8. Способ по п.6, в котором идентифицируют водителя, по результатам этой идентификации определяют, желательна ли демонстрация оперативной информации, и автоматически осуществляют упомянутую демонстрацию, если установлена ее желательность.
9. Способ по п.7, включающий шаг, на котором определяют, впервые ли водитель управляет конкретным транспортным средством или транспортным средством конкретного типа на протяжении определенного периода времени, и автоматически осуществляют упомянутую демонстрацию, если установлено, что это происходит впервые.
10. Способ по п.8, включающий шаг, на котором определяют, впервые ли водитель управляет конкретным транспортным средством или транспортным средством конкретного типа на протяжении определенного периода времени, и автоматически осуществляют упомянутую демонстрацию, если установлено, что это происходит впервые.
11. Способ по п.8, включающий шаг, на котором определяют уровень квалификации идентифицированного водителя и выбирают применимую демонстрацию в зависимости от установленного уровня квалификации.
12. Способ по п.10, включающий шаг, на котором определяют уровень квалификации идентифицированного водителя и выбирают применимую демонстрацию в зависимости от установленного уровня квалификации.
13. Способ по любому из пп.1-5, в котором делают демонстрацию доступной для выбора по запросу водителя и автоматически осуществляют демонстрацию, если она запрошена.
14. Способ по любому из пп.1-5, включающий стадию, на которой используют множество различных заданных демонстраций и воспроизводят конкретную демонстрацию из этого множества.
15. Способ по п.12, включающий стадию, на которой используют множество различных заданных демонстраций и воспроизводят конкретную демонстрацию из этого множества.
16. Способ по любому из пп.1-5, в котором оперативная информация содержит информацию о рабочей среде оператора в отсеке водителя.
17. Способ по п.16, в котором оперативная информация содержит информацию о доступных эргономических корректировках рабочей среды оператора.
18. Способ по п.17, в котором оперативная информация представляет собой обучающую демонстрацию заданного набора доступных корректировок рабочей среды оператора в отсеке водителя.
19. Способ по п.18, в котором оперативная информация содержит рекомендации об изменениях поведения и(или) положения водителя на протяжении рабочей смены.
20. Способ по п.19, в котором оперативная информация содержит информацию об управляемых оператором элементах в отсеке водителя для управления транспортным средством.
21. Способ по п.20, в котором оперативная информация представляет собой обучающую демонстрацию заданного набора управляемых оператором элементов.
22. Способ по п.21, в котором оперативная информация содержит информацию о функции каждого из заданного набора управляемых оператором элементов.
23. Способ по п.22, в котором оперативная информация содержит информацию об оптимальном использовании каждого из заданного набора управляемых оператором элементов.
24. Способ по любому из пп.1-5, включающий шаг, на котором определяют, находится ли транспортное средство в нерабочем состоянии, и автоматически воспроизводят демонстрацию для водителя, только если транспортное средство находится в нерабочем состоянии.
25. Способ по п.24, где нерабочим состоянием является состояние, в котором транспортное средство стоит на месте.
26. Способ по п.25, включающий шаг, на котором прерывают демонстрацию, если состояние транспортного средства изменяется на рабочее состояние.
27. Способ по любому из пп.1-5, в котором транспортное средство представляет собой рабочую машину.
28. Способ по п.27, в котором оперативная информация содержит информацию об управлении рабочим оборудованием.
29. Способ по п.28, в котором оперативная информация содержит информацию об управлении гидравлической системой, которая оперативно соединена с рабочим оборудованием.
30. Способ по п.29, в котором оперативная информация содержит информацию о приведении в движение рабочей машины.
31. Способ по п.30, в котором оперативная информация содержит информацию об управлении приводом, который оперативно соединен с контактирующими с землей элементами.
| US 2006024646 A1, 02.02.2006 | |||
| Устройство для автоматического регулирования напряжения генератора переменного тока | 1936 |
|
SU51097A1 |
| US 2003108847 A1, 12.06.2003 | |||
| WO 9834812 A2, 13.08.1998 | |||
| СПОСОБ КОМПЛЕКСИРОВАННОГО ПРЕДСТАВЛЕНИЯ ВИЗУАЛЬНОЙ ИНФОРМАЦИИ ДЛЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2138409C1 |

