Заявляемая группа изобретений относится к области наземного безрельсового транспорта, а более конкретно к двухколейным персональным колесным транспортным средствам с электроприводом и к способам преодоления ими лестничных маршей.
Двухколейные персональные транспортные средства, такие как инвалидные кресла-коляски, персональные электромобили (пермобили) и электроскутеры, имеют, как правило, недостаточную универсальность.
Известно персональное транспортное средство Chairman Mini Stander, содержащее раму с колесами, приводы вращения колес, кресло с сиденьем, спинкой и опорами для ног, снабженными подпятниками, устройство изменения положения кресла с приводами и систему управления приводами, при этом колеса в количестве четырех (передние ведомые поворотные и задние неповоротные большего диаметра) установлены без возможности изменения колесной базы, подпятники расположены между левым и правым передними колесами, кресло выполнено с шарнирным сочленением сиденья, спинки и рычага опор для ног, а устройство изменения положения кресла - с возможностью поворота спинки и рычага относительно сиденья, с возможностью вертикального положения водителя-пользователя (или пациента), при этом подпятники могут опираться на опорную поверхность на уровне пятен контакта передних колес [1].
Конструкция известного транспортного средства является трансформируемой, что позволяет его использовать для передвижения как в уличных, так и в домашних условиях, в частности, путем перевода водителя-пользователя в вертикальное положение (для общения с окружающими на уровне глаз собеседника, для работы с книгами на стеллажах, для нагрузки суставов и т.д.). Однако транспортное средство тихоходно, не отличается высокой маневренностью и проходимостью, а главное - не способно самостоятельно преодолевать лестничные марши.
Известен также ряд четырехколесных транспортных средств рассматриваемого класса, способных самостоятельно преодолевать лестничные марши за счет вращения колес и изменения колесной базы [2-5].
Однако их технико-эксплуатационные возможности недостаточно высоки. В частности, не предусмотрено вертикальное положение водителя-пользователя, четырехколесная схема уступает трехколесной по маневренности и простоте конструкции, дискретность периферийных упругих элементов (роликов) снижает в сравнении с пневматическими шинами плавность хода и скоростные возможности вне лестничных маршей, при низких коэффициентах трения "колесо-ступень" возможны срывы колес со ступеней из-за недостаточности сцепления.
Наиболее близким аналогом заявляемого транспортного средства, совпадающим с ним по наибольшему числу существенных признаков и принятым за устройство-прототип, является транспортное средство, содержащее раму с колесами, приводы вращения колес, устройство изменения и фиксации колесной базы в диапазоне, по меньшей мере, от меньшего до большего ее значений, снабженное приводом, кресло с сиденьем и спинкой, устройство изменения положения кресла с приводом и систему управления приводами [6].
В нем рама выполнена в виде телескопически взаимосвязанных передней и задней частей с отключаемым стопором, несущих соответственно два передних и два задних колеса, снабженных упругими шинами, и входит в состав устройства изменения и фиксации колесной базы, при этом оси колес установлены в частях рамы неподвижно. Привод устройства изменения и фиксации колесной базы конструктивно совмещен с упомянутым стопором и выполнен в виде привода поступательного движения, неподвижное и подвижное звенья которого соединены с передней и задней частями рамы соответственно (или наоборот).
Однако известное транспортное средство имеет ряд недостатков. Во-первых, четырехколесная схема уступает трехколесной по маневренности в кинематическом повороте, являющемся предпочтительным при эксплуатации скутеров, пермобилей и самоходных кресел. Во-вторых, смещение центра масс транспортного средства (развесовка по осям колес) за счет поворота кресла в вертикальной плоскости и выдвижения задней (по ходу на лестничном марше) части рамы недостаточно для реализации необходимой тяги по сцеплению переднего колеса. Для уверенного подъема (въезда с попаданием в угол трения) задних колес на очередную ступень требуется существенное смещение кресла вперед. Вместе с тем, при одной лишь замене двух передних колес на одно значительно снизится устойчивость на лестничном марше: при курсовом отклонении (рыскании) транспортного средства опора на одно переднее и одно заднее колеса приводит к "заваливанию" транспортного средства набок вплоть до аварийной ситуации. В-третьих, известное транспортное средство имеет узкое функциональное назначение. В частности, не предусмотрено вертикальное положение пользователя в кресле. В-четвертых, имеют место большие потребные хода подвижного звена привода устройства изменения и фиксации колесной базы. В-пятых, постоянство дорожного просвета и невозможность низкой посадки водителя-пользователя в кресле затрудняют размещение в автомобиле (особенно за рулем) и в других носителях. Все это обусловливает недостаточно высокие технико-эксплуатационные характеристики транспортного средства-прототипа.
Наиболее близким аналогом заявляемого способа по совокупности существенных признаков, принятый за способ-прототип, является способ подъема описанного выше транспортного средства по лестничным маршам, включающий изменение продольного положения центра масс транспортного средства и вращение переднего и задних колес при переменной колесной базе [6].
Изменение продольного положения центра масс получается "автоматически", как следствие наклона кресла (в компенсацию угла подъема лестничного марша) и увеличения колесной базы, и соответственно невелико. Въезд ("подтягивание") нижестоящих колес на очередную ступень осуществляется в значительной степени за счет силового действия привода устройства изменения и фиксации колесной базы при условии достаточности сцепления вышестоящих колес в угле трения на соответствующей ступени.
Однако неоптимальность развесовки и неразвитость пятен контакта вышестоящих колес с опорной поверхностью приводят к ситуациям (особенно при низком коэффициенте трения), когда подъем невозможен или наблюдаются срывы транспортного средства со ступеней из-за соскальзывания вышестоящих колес.
Задачей являлась разработка такой конструкции персонального транспортного средства и способа преодоления им лестничных маршей, которые бы обеспечивали расширение технико-эксплуатационных возможностей персональных транспортных средств, преимущественно скутеров и самоходных кресел, за счет оперативной их трансформации (с минимальными трудозатратами пользователя) при сопутствующем повышении маневренности, профильной проходимости и безопасности при перемещении по лестничным маршам.
Решение поставленной задачи достигается группой изобретений, объединенных единым изобретательским замыслом, а именно тем, что в транспортном средстве, содержащем раму с колесами, приводы вращения колес, устройство изменения и фиксации колесной базы, снабженное приводом, кресло с сиденьем и спинкой, устройство изменения положения кресла с приводом и систему управления приводами, предусмотрено три колеса, одно из которых переднее с рулевым приводом, снабженным рулевой колонкой с рулем, установленной с возможностью изменения и фиксации ее длины и положения по углу наклона, кресло снабжено опорами для ног в виде рычагов с подпятниками слева и справа от переднего колеса, опоры для ног выполнены с возможностью изменения длины рычагов, кресло выполнено с шарнирным сочленением сиденья, спинки и опоры для ног и снабжено приводом, обеспечивающим возможность поворота спинки и рычагов относительно сыденья, с возможностью вертикального положения водителя-пользователя, при этом имеется возможность опускания подпятников до силового контакта с опорной поверхностью слева и справа от пятна контакта переднего колеса.
Тыльная поверхность подпятников опор для ног может быть выполнена фрикционной из условия повышенного коэффициента трения с материалом ступеней лестничных маршей.
Рама может быть выполнена в виде телескопически взаимосвязанных неподвижной и, по крайней мере, одной подвижной частей с отключаемым стопором, несущих соответственно переднее и задние колеса, и входить в состав устройства изменения и фиксации колесной базы, при этом задние колеса установлены на концах рычагов, прикрепленных к подвижному звену установленного на задней части рамы привода их реверсивного поворота в продольных вертикальных плоскостях в секторе, расположенном по обе стороны от их нижнего вертикального положения, а рычаги и привод их поворота совместно образуют упомянутый привод устройства изменения и фиксации колесной базы.
Рычаги с задними колесами могут быть установлены с возможностью отклонения назад от нижнего положения на угол β не менее величины
β = α+arcsin((R-δ-h)/R),
где α - угол подъема лестничного марша, град;
R - радиус колеса, см;
δ - вертикальная деформация колеса, см;
h - высота ступени лестничного марша, см.
Решение поставленной задачи достигается также тем, что в способе подъема транспортного средства, характеризуемого указанной выше совокупностью основных конструктивных признаков, по лестничным маршам за счет изменения продольного положения центра масс транспортного средства и вращения переднего и задних колес при переменной колесной базе кресло переводят посредством приводов изменения его положения и конфигурации в крайнее переднее вертикальное положение с вертикальным положением водителя-пользователя, въезжают передним колесом за счет приводов вращения колес на ступень лестничного марша согласно упору задних колес в кромку первой ступени, выключают приводы вращения задних колес, въезжают передним колесом на последующую вышестоящую ступень за счет приводов вращения переднего колеса и изменения колесной базы в сторону ее увеличения, выключают привод вращения переднего колеса, опускают подпятники опор для ног до силового контакта с опорной поверхностью слева и справа от пятна контакта переднего колеса, въезжают задними колесами на первую ступень за счет приводов вращения задних колес и изменения колесной базы в сторону ее уменьшения, выключают приводы вращения задних колес, поднимают подпятники, включают привод вращения переднего колеса и воспроизводят указанную последовательность операций вплоть до силового контакта подпятников с поверхностью последней ступени лестничного марша и уменьшения колесной базы, после чего поднимают подпятники, включают привод вращения переднего колеса и въезжают задними колесами на оставшиеся последующие ступени, включая последнюю, при этом на протяжении всего подъема на лестничном марше стабилизируют вертикальное положение кресла посредством привода изменения его положения.
В частном случае выполнения способа въезд задними колесами на предпоследнюю и последнюю ступени осуществляют при уменьшенной колесной базе. Кроме того, подпятники могут опускать в крайнее нижнее положение до неполного вывешивания переднего колеса.
Таким образом, основная идея изобретения состоит в том, что транспортное средство въезжает задними колесами на нижестоящую ступень за счет совместной работы приводов их вращения и привода изменения колесной базы в сторону ее уменьшения при опущенных подпятниках (до их силового контакта с вышестоящей ступенью). При этом водитель-пользователь через подпятники опирается на вышестоящую ступень слева и справа от переднего колеса, обеспечивая устойчивость трехколесного транспортного средства и, одновременно, существенно увеличивает силу трения покоя (расширяя угол трения), а подвижная (задняя) часть рамы прижимают задние колеса к кромке ступени, увеличивая сцепление.
Среди известных устройств и способов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время, именно за счет последней достигается новый технический результат в соответствии с поставленной задачей: расширение технико-эксплуатационных возможностей персональных транспортных средств, преимущественно скутеров и самоходных кресел, за счет оперативной их трансформации (с минимальными трудозатратами пользователя) при сопутствующем повышении маневренности, профильной проходимости и безопасности при перемещении по лестничным маршам.
Заявляемое транспортное средство изображено на чертежах, где:
на фиг.1 показано транспортное средство, общий вид (в аксонометрии);
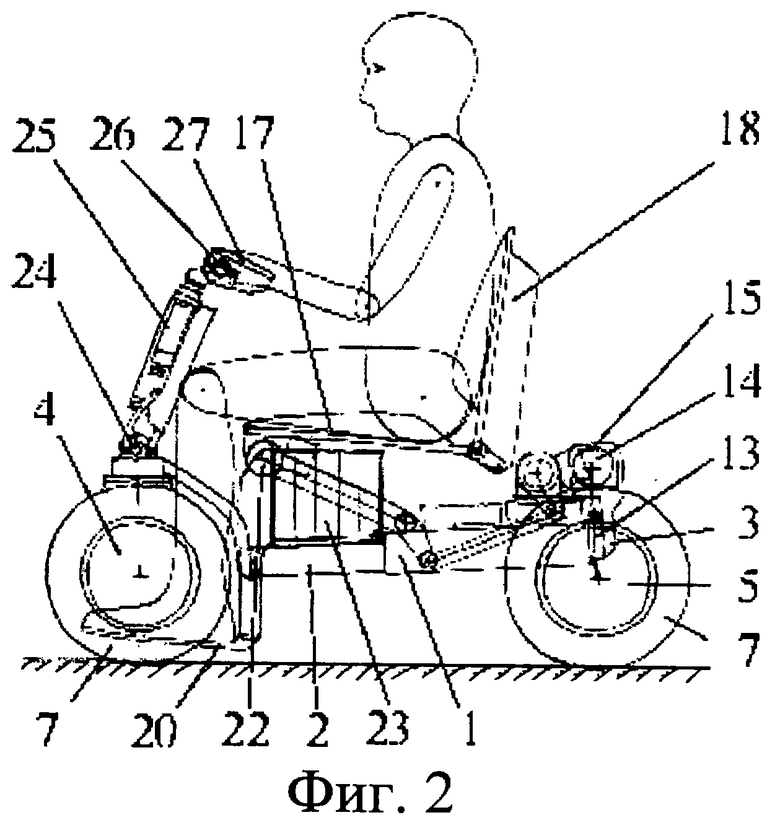
на фиг. 2 - транспортное средство в случае удлиненной колесной базы (конфигурация "скутер" для движения в уличных условиях), вид сбоку;
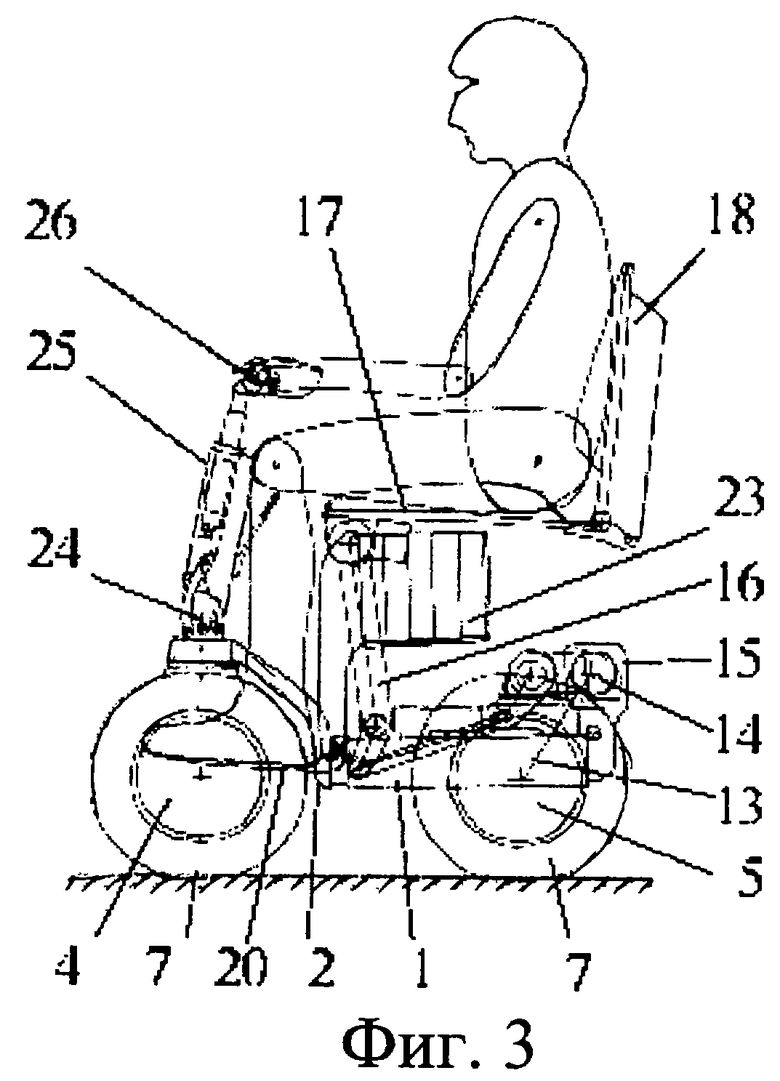
на фиг. 3 - транспортное средство в случае укороченной колесной базы (конфигурация "кресло" для движения в условиях помещения), вид сбоку;
на фиг.4 - схема подвески задних колес, вид сзади;
на фиг.5 - схема размещения приводов;
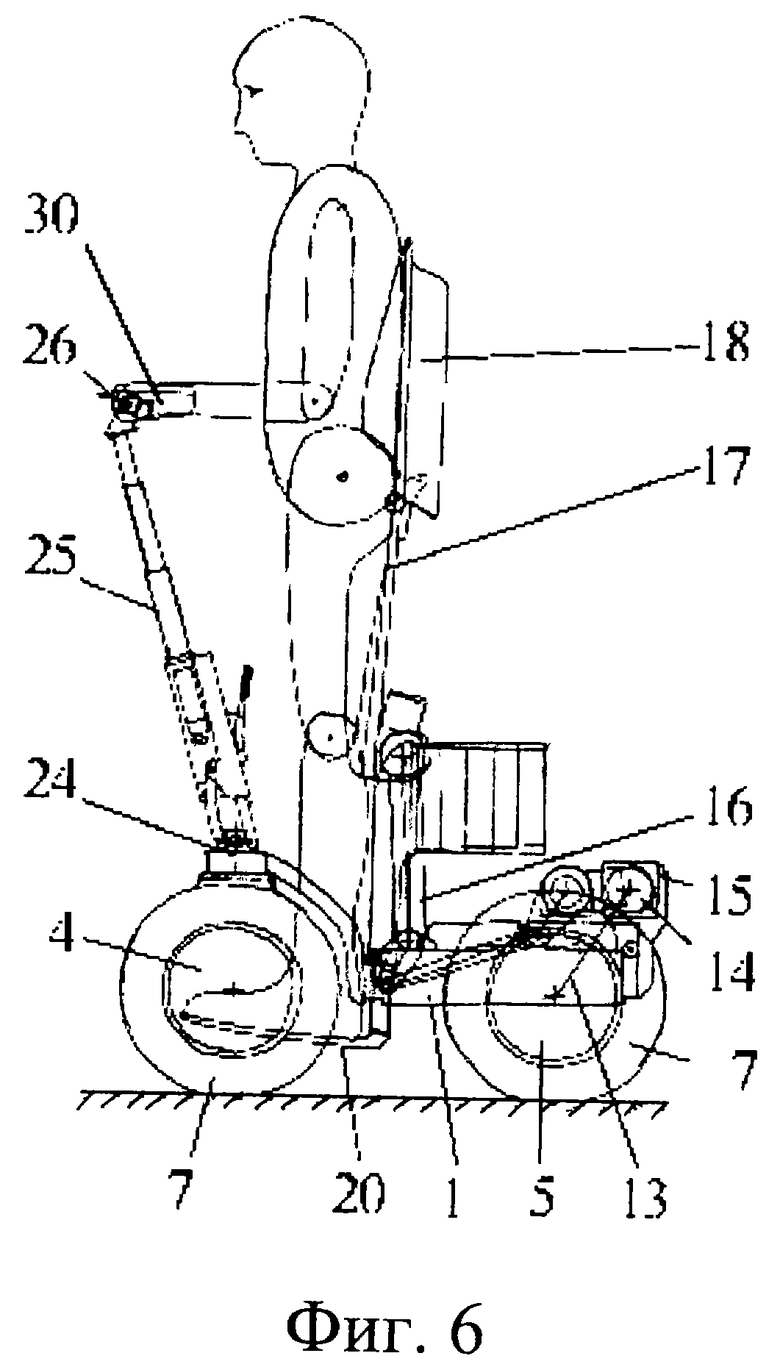
на фиг. 6 схематически изображено транспортное средство с водителем-пользователем в конфигурации "компакт-вертикаль";
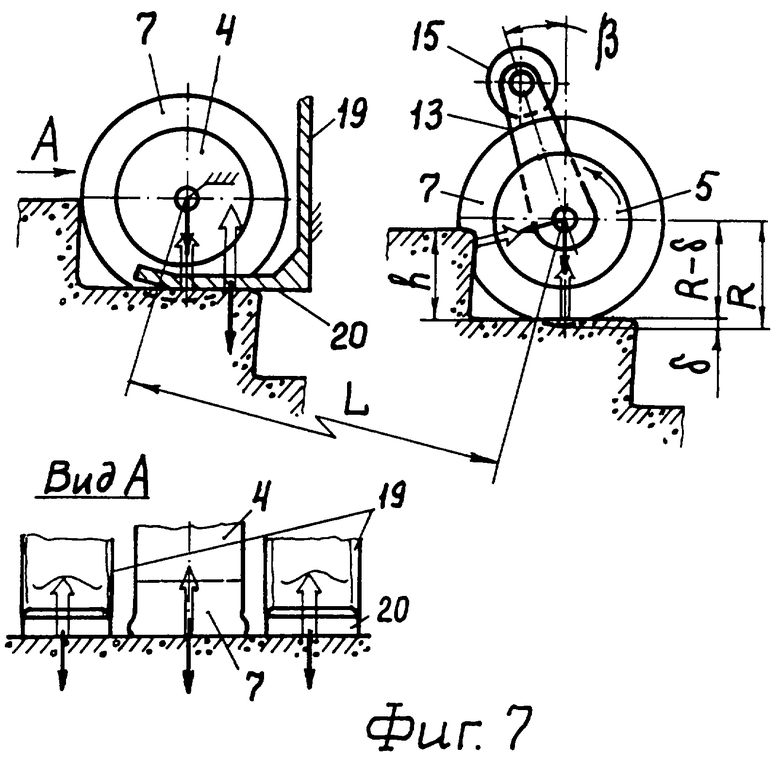
на фиг. 7 изображена схема взаимодействия колес и подпятников опор для ног со ступенями лестничного марша;
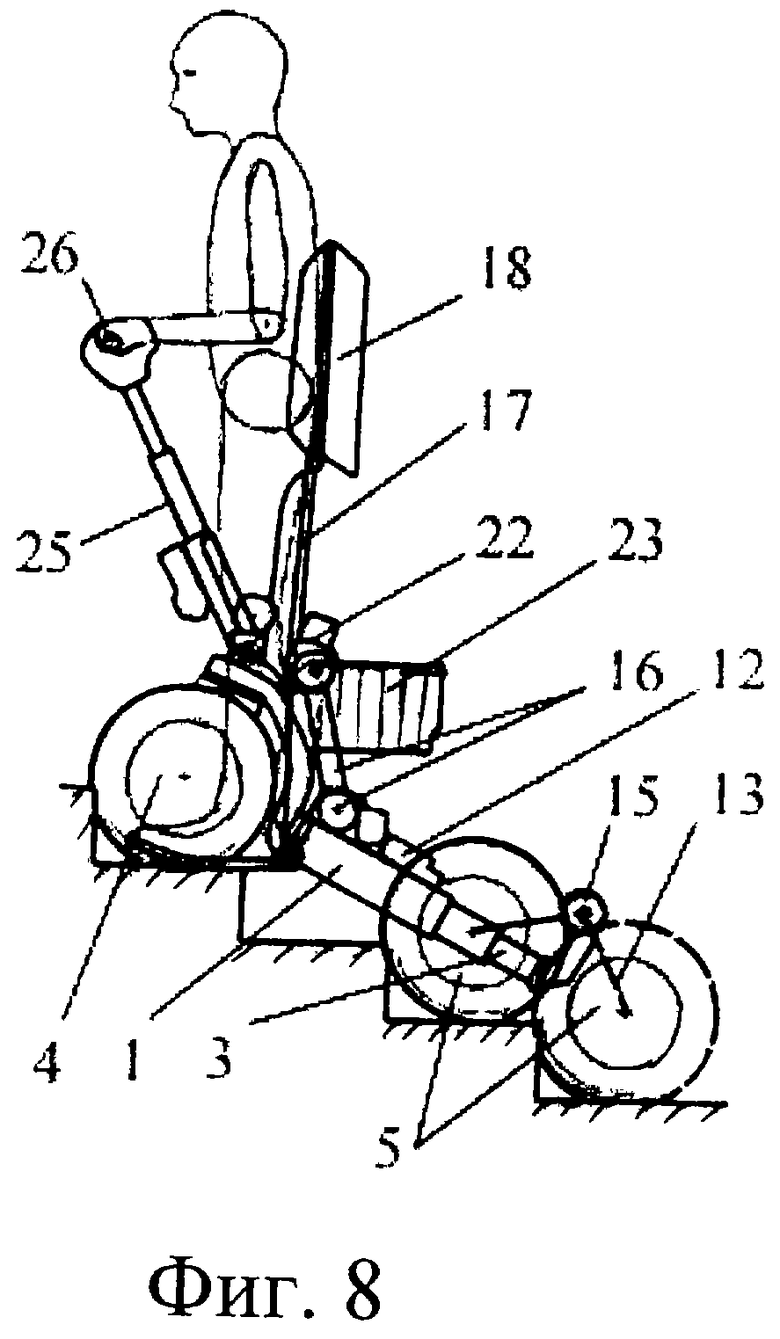
на фиг. 8 схематически изображено транспортное средство с водителем-пользователем при подъеме по лестничному маршу, процесс въезда задними колесами на первую ступень;
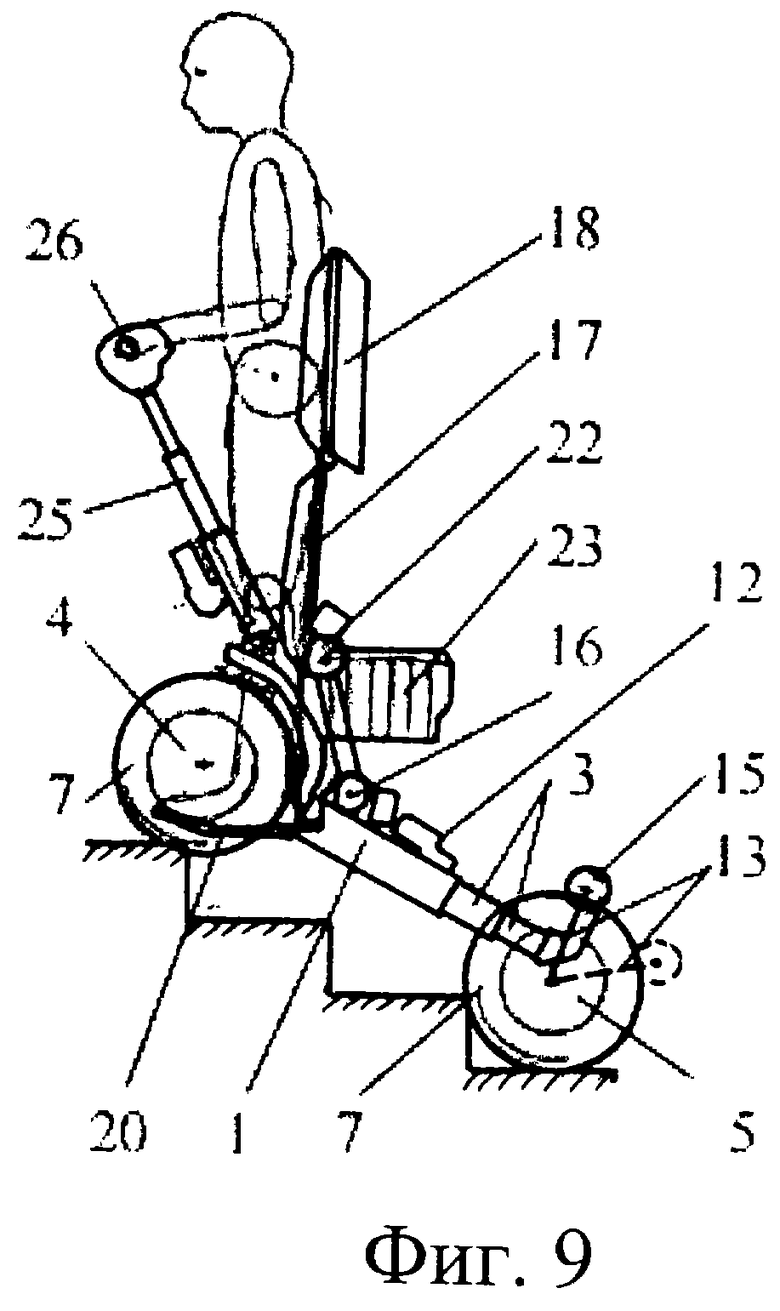
на фиг. 9 - то же, процесс въезда передним колесом на последующую ступень.
Заявленное транспортное средство в предпочтительном исполнении содержит (см. фиг. 1-3) раму, состоящую из частей 1, 2, 3. Рама 1-3 выполнена в виде телескопического устройства (с двумя "телескопами") с возможностью независимого друг от друга продольного перемещения его штоков - подвижных рамных частей 2 и 3 относительно корпуса "телескопа" - неподвижной рамной части 1. На передней рамной части 2 установлено управляемое (ведущее) колесо 4, а на задней рамной части 3 - пара управляемых (ведущих) колес 5, 6. Все колеса снабжены пневматическими или иными упругими шинами 7. Предусмотрены приводы 8 и 9, 10 (см. фиг.5) независимого друг от друга вращения всех колес 4 и 5, 6 соответственно (не исключена схема с общим для задних колес 9, 10 приводом; рекомендуется использование мотор-колес). Таким образом, рамная часть 2 с управляемым колесом 4 образует передний колесный мост, а рамная часть 3 с управляемыми колесами 5, 6 - задний колесный мост. Не исключен вариант конструкции с двумя рамными частями (часть 1 совмещена с частью 2 или частью 3), т.е. рамная конструкция с одним "телескопом". Каждый "телескоп" снабжен отключаемым стопором 11 и 12 (см. фиг.5).
Задние колеса 5 (6) установлены на концах рычагов 13 (см. фиг.2-4). Последние противоположными своими концами прикреплены к подвижному звену 14 реверсивного привода 15 их поворота (соответственно реверсивного поворота) в продольных вертикальных плоскостях в секторе, расположенном по обе стороны от их нижнего вертикального положения (см. фиг.14). При этом привод 15 установлен на рамной части 3. В частном случае исполнения рычаги с задними колесами установлены с возможностью отклонения назад от нижнего положения на угол β не менее величины
β = α+arcsin((R-δ-h)/R),
где α - угол подъема лестничного марша, град;
R - радиус колеса, см;
δ - вертикальная деформация колеса, см;
h - высота ступени лестничного марша, см.
Телескопическая рама 1-3, стопоры 11, 12, колеса 4-6, приводы 8-10 и привод 15 с рычагами 13 совместно образуют устройство изменения и фиксации колесной базы L в широком диапазоне потребных значений от Lmin до Lmax.
На рамной части 1 установлено кресло (обозначено позициями поэлементно) с устройством 16 изменения его положения в продольной вертикальной плоскости (с приводом), регулируемое для эргономической адаптации пользователя. Кресло включает в себя шарнирно сочлененные сиденье 17, спинку 18 и опоры для ног с рычагом (двумя спаренными рычагами) 19 и подпятниками 20, 21. Предусмотрен привод (система приводов) 22 изменения конфигурации кресла 17-21, обеспечивающий возможность поворота спинки 18 и рычага (рычагов) 19 относительно сиденья 17, а также изменения (увеличения-уменьшения) длины рычага (рычагов) 19, т. е. расстояния между подпятниками 20, 21 с одной стороны и основанием рычага 19 с другой. Тыльная поверхность подпятников 20, 21 (т.е. обращенная к опорной поверхности) может быть выполнена (как рекомендация) фрикционной из условия повышенного коэффициента трения с материалом ступеней лестничных маршей, например в виде накладок.
С тыльной стороны сиденья 17 установлен автономный источник энергии 23 в виде блоков аккумуляторных, конденсаторных или иных батарей.
Предусмотрен рулевой привод 24, выполненный с возможностью поворота колеса 4. Он снабжен рулевой колонкой 25 с рулем 26 мотоциклетного или иного типа. Колонка 25 установлена перед креслом 17-21 на рамной части 2 (на переднем колесном мосту) с возможностью изменения и фиксации положения по углу наклона в продольной вертикальной плоскости и уровню расположения руля 26, включая сложенное положение. Кроме того, она установлена с возможностью наклона и фиксации в рабочем состоянии в любом продольном направлении (вперед-назад) относительно своего вертикального положения.
В состав транспортного средства входит система управления всеми приводами, включающая в себя органы управления (руль 26 и панель управления 27 на колонке 25, не исключено дублирование от ручного пульта типа "джойстик" или аналогичных систем) и предпочтительно устройство гиростабилизации (не показана).
Изложенные выше примеры конструкции не исключают другие возможные варианты в рамках заявленной совокупности существенных конструктивных признаков.
Транспортное средство работает следующим образом.
Для эксплуатации транспортного средства в любом из возможных режимов его сначала соответствующим образом трансформируют (на фиг.1-3, 6, 8, 9 представлена лишь часть возможных конфигураций и соответственно режимов).
При использовании транспортного средства для скоростного движения в уличных условиях (см. фиг. 2) задают посредством приводов 8-10 при отключенном соответствующем стопоре 11, 12 увеличенное фиксированное значение L вплоть до максимального (Lmax) или близкого к максимальному. В конце трансформации фиксаторы 11, 12 должны быть включены. При этом остается возможность оперативной корректировки колесной базы работой привода 15. Кресло 17-21 устанавливают в общем случае посредством приводов 16-22 в удобное для пользователя положение. Колонку 25 и руль 26 устанавливают в удобное для пользователя рабочее фиксированное угловое положение. Отключают при необходимости приводы 9, 10, переводя тем самым задние колеса 5, 6 в ведомый режим. В описанном положении транспортное средство по своим технико-эксплуатационным характеристикам соответствует скутеру и передвигается обычным для него образом. При этом кинематический поворот осуществляют за счет поворота переднего колеса 4 рулем 26.
Для использования транспортного средства в режиме "кресло", т.е. в комнатных условиях (см. фиг. 3), задают описанным выше способом минимальное (Lmin) или близкое к минимальному фиксированное значение L, а колонку 25 устанавливают в удобное рабочее или нерабочее (сложенное) положение. В описанном трансформированном состоянии транспортное средство по своим технико-эксплуатационным характеристикам соответствует маневренным транспортным средствам: "самоходное кресло", "пермобиль", и передвигается обычным для них образом.
Возможно перемещение и в режиме "компакт-вертикаль" (см. фиг.6) при вертикальном положении водителя-пользователя.
Для преодоления лестничного марша своим передним ходом непосредственно перед преодолением задают определенное в каждом конкретном случае (в зависимости от эксплуатационных условий) значение колесной базы за счет работы приводов 8, 10. В дополнение к "автоматическому" перераспределению вертикальной нагрузки на оси колес 5, 6 вследствие изменения взаимного положения рамных частей 1-3 кресло 17-21 переводят в упомянутое в описании устройства вертикальное положение посредством устройств 16, 22. Тем самым существенно смещают центр масс транспортного средства в сторону подъема лестничного марша до преимущественно равной вертикальной нагрузки на оси (развесовки по осям) нижних 5, 6 и верхнего 4 колес (см. фиг.8). Делают это одновременно, или с некоторой временной задержкой, или наоборот упреждением по отношению к установке колесной базы. Колонку 25 устанавливают в характерное для вертикального положения пользователя рабочее положение с ее наклоном вперед от вертикали и возможностью опоры на нее руками.
Собственно передвижение на лестничном марше (регулярный режим его преодоления) осуществляют согласно данному изобретению в указанной конфигурации следующим способом (см. фиг.8, 9).
Въезжают колесом 4 посредством приводов 8-10 при постоянном значении колесной базы (например, при L1) на одну из ступеней лестничного марша (в данном примере - на вторую ступень) до упора колес 5, 6 в кромку первой ступени (иначе говоря, на ступень лестничного марша согласно упору задних колес в первую ступень). Выключают приводы 9, 10. Въезжают колесом 4 посредством привода 8 и привода 15 изменения колесной базы в сторону ее увеличения до L2 на последующую вышестоящую ступень (в данном примере - на третью). Выключают привод 8. Опускают посредством привода (системы приводов) 22 подпятники 20, 21 до силового контакта с опорной поверхностью (поверхностью третьей ступени) слева и справа от пятна контакта колеса 4 (см. фиг.8). При этом подпятники 20, 21 рекомендуется опускать в крайнее нижнее положение до неполного вывешивания колеса 4. Затем въезжают колесами 5, 6 (синхронно) на первую ступень за счет приводов 9, 10 и привода 15 изменения колесной базы в сторону ее уменьшения до L1 (см. фиг.7). Выключают приводы 9, 10. Поднимают посредством привода (системы приводов) 22 подпятники 20, 21 и включают привод 8 (см. фиг.9). Воспроизводят указанную последовательность операций вплоть до силового контакта подпятников 20, 21 с поверхностью последней ступени лестничного марша и уменьшения колесной базы до L1. Поднимают подпятники 20, 21, включают привод 8 и въезжают колесами 5,6 на оставшиеся последующие ступени, включая последнюю.
Преодоление двух последних ступеней рекомендуется осуществлять при уменьшенной колесной базе (L1) и неработающем приводе 15.
На протяжении всего подъема на лестничном марше стабилизируют вертикальное положение кресла 17-21 посредством привода 22 и устройства гиростабилизации.
Использование изобретения позволяет, таким образом, расширить технико-эксплуатационные возможности персональных транспортных средств, преимущественно скутеров и самоходных кресел, при сопутствующем повышении маневренности, профильной проходимости и безопасности при перемещении по лестничным маршам.
Источники информации
1. Chairman Mini Stander (Permobil): Permobil, lnc., 6B Gill Street, Woburn, M 01801 1-888-PERMOBIL, Switzerland.
2. Патент РФ 2058766, кл. А 61 G 5/06, опубликован 27.04.1996.
3. Патент РФ 2116061, кл. A 61 G 5/06, опубликован 27.07.1998.
4. Самойлов А. Д., Семенов А.Г., Элизов А.Д. Разработка концепции универсального малогабаритного шасси высокой проходимости/ /Известия ВУЗов. Машиностроение, 1998, 1-3. - С.88-94.
5. Волков Ю.П., Самойлов А.Д., Семенов А.Г, Элизов А.Д. Самоходные инвалидные кресла-коляски второго поколения: концепция и перспективы производства/ /Медицинская техника, 1999, 2. - С.34-36.
6. Патент РФ 2115401, кл. А 61 G 5/06, опубликован 20.07.1998 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕОДОЛЕНИЯ ИМ ЛЕСТНИЧНЫХ МАРШЕЙ (ВАРИАНТЫ) | 2000 |
|
RU2200526C2 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2217119C1 |
| УСТРОЙСТВО ДЛЯ РАЗМЕЩЕНИЯ ИНДИВИДУАЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА С ЧЕЛОВЕКОМ ЗА РУЛЕМ АВТОМОБИЛЯ | 2000 |
|
RU2179938C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА С ДИСФУНКЦИЕЙ НИЖНИХ КОНЕЧНОСТЕЙ В САМОХОДНОЙ КОЛЯСКЕ НА ЛЕСТНИЦЕ С ПОРУЧНЯМИ | 2010 |
|
RU2417787C1 |
| ТРАНСФОРМИРУЕМОЕ КРЕСЛО ПРЕИМУЩЕСТВЕННО ИНДИВИДУАЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2210349C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2558338C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2008 |
|
RU2368366C1 |
| САМОХОДНОЕ ИНВАЛИДНОЕ КРЕСЛО | 1996 |
|
RU2115401C1 |
| СПОСОБ ПЕРЕДВИЖЕНИЯ САМОХОДНОГО ИНВАЛИДНОГО КРЕСЛА ПО ЛЕСТНИЧНЫМ МАРШАМ | 1996 |
|
RU2116061C1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |


Изобретение относится к устройствам, облегчающим подъем по ступенькам. Транспортное средство имеет три ведущих колеса, одно из которых - переднее (4) снабжено рулевой колонкой (25) с рулем (26), установленной с возможностью изменения и фиксации ее длины и положения по углу наклона. Рама выполнена телескопической с отключаемым стопором (12). Задние колеса (5) установлены на поворотных рычагах (13). Телескопическая рама и поворотные рычаги (13) обеспечивают изменение и фиксацию колесной базы. Устройство изменения положения (16) кресла перемещает кресло вдоль транспортного средства. Устройство изменения конфигурации (22) кресла придает водителю-пользователю вертикальное положение с возможностью опускания подпятников до контакта с опорной поверхностью по бокам переднего колеса (4). Способ подъема использует опору подпятников на ступеньки и изменение колесной базы при крайнем переднем вертикальном положении кресла с вертикальным положением водителя-пользователя. Предлагаемое техническое решение направлено на повышение устойчивости и безопасности при преодолении лестничных маршей. 2 с. и 5 з.п.ф-лы, 9 ил.
β = α+arcsin((R-δ-h)/R),
где α - угол подъема лестничного марша, град;
R - радиус колеса, см;
δ - вертикальная деформация колеса, см;
h - высота ступени лестничного марша, см.
| САМОХОДНОЕ ИНВАЛИДНОЕ КРЕСЛО | 1996 |
|
RU2115401C1 |
| Питатель для подачи коконов к ловителю кокономотального автомата | 1959 |
|
SU127929A1 |
| US 6192533, 27.02.2001 | |||
| DE 19816879 A1, 12.10.1999 | |||
| Устройство контроля дискретного канала связи | 1973 |
|
SU464982A1 |

