ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
В соответствии с §119 раздела 35 свода законов США приоритет данной заявки заявляется по заявке на патент Кореи №10-2007-90680, поданной 6 сентября 2007 г.в Корейское Бюро Интеллектуальной Собственности, описание которой целиком включено в данный документ посредством ссылки.
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к пылесосу, а более конкретно к всасывающей щетке для пылесоса, которая может автоматически регулировать расстояние между очищаемой поверхностью и нижней поверхностью нижнего кожуха щетки, причем всасывающее отверстие выполнено в соответствии с типом очищаемой поверхности - ковром или твердым полом.
ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
В общем случае пылесос - это электрическое устройство, которое втягивает в себя и собирает пыль или грязь с очищаемой поверхности посредством всасывающей силы, вырабатываемой источником создания разрежения. Были разработаны различные типы пылесосов, один из которых - пылесос баллонного типа, в общем случае содержащий корпус, соединительное устройство и всасывающую щетку.
В корпусе пылесоса установлен источник создания разрежения, такой как всасывающий двигатель, который вырабатывает всасывающую силу, и пылеотделительная часть, которая собирает втянутую пыль и/или грязь. Соединяющее устройство содержит ручку для пользователя, выступающую трубку для соединения ручки с всасывающей щеткой, и гибкий шланг для соединения ручки с корпусом пылесоса. Более того, всасывающая щетка, которая соприкасается с очищаемой поверхностью и втягивает воздух, содержащий пыль и/или грязь, имеет всасывающее отверстие, выполненное на ее нижней поверхности.
Примерами поверхностей, которые может очищать пылесос, являются ковер и твердый пол. Далее термин «твердый пол» будет означать, что очищаемая поверхность имеет скользкую текстуру из камня, дерева или напольной бумаги.
Если очищаемая поверхность является твердым полом, всасывающая щетка пылесоса часто прилипает к очищаемой поверхности из-за всасывающей силы. В этом случае пользователь должен применять большую силу в управлении всасывающей щеткой из-за того, что всасывающая щетка прилипает к очищаемой поверхности. Силу, вызванную прилипанием, которую вынужден преодолевать пользователь, далее будем называть «рабочим сопротивлением». Напротив, если очищаемая поверхность - ковер, то количество раз, которое всасывающая щетка прилипает к очищаемой поверхности, относительно меньше. Однако, когда очищаемая поверхность представляет собой ковер, требуется большая всасывающая сила для втягивания пыли или грязи с волокон на верхней поверхности ковра, по сравнению с тем, когда очищаемая поверхность представляет собой твердый пол.
Рабочее сопротивление и всасывающая сила всасывающей щетки, прикладываемые к очищаемой поверхности, тесно связаны с высотой всасывающей щетки над очищаемой поверхностью, т.е. расстоянием между очищаемой поверхностью и нижней поверхностью всасывающей щетки, в которой имеется всасывающее отверстие. Более конкретно, чем меньше расстояние между очищаемой поверхностью и нижней поверхностью всасывающей щетки, тем больше будут всасывающая сила и рабочее сопротивление. Соответственно, чем больше расстояние между очищаемой поверхностью и нижней поверхностью всасывающей щетки, тем меньше будут всасывающая сила и рабочее сопротивление.
Когда расстояние между нижней поверхностью всасывающей щетки и очищаемой поверхностью неизменно, если очищаемая поверхность - твердый пол, то, как правило, требуется большая сила для управления всасывающей щеткой, т.к. рабочее сопротивление всасывающей щетки большое, а если очищаемая поверхность - ковер, то пыль и/или грязь втягиваются неэффективно, потому что всасывающая сила маленькая.
Для решения перечисленных выше проблем была разработана всасывающая щетка, в которой расстояние между ее нижней поверхностью и очищаемой поверхностью выполнено с возможностью изменения. В разработанной всасывающей щетке на ее верхней поверхности расположен рычаг, вручную управляемый пользователем. Соответственно, если очищаемая поверхность - твердый пол, пользователь должен вручную управлять рычагом, чтобы передвигать нижнюю поверхность всасывающей щетки дальше от очищаемой поверхности, увеличивая, таким образом, расстояние между ними и уменьшая рабочее сопротивление всасывающей щетки. К тому же, если очищаемая поверхность - ковер, пользователь должен вручную управлять рычагом, чтобы придвигать нижнюю поверхность всасывающей щетки ближе к очищаемой поверхности, уменьшая, таким образом, расстояние между ними и увеличивая рабочее сопротивление всасывающей щетки.
Поскольку пользователь должен вручную управлять рычагом всасывающей щетки каждый раз, когда меняется очищаемая поверхность, это является неудобством для пользователя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Соответственно, чтобы решить по меньшей мере одну из проблем и/или недостатков, указанных выше, и обеспечить преимущества, указанные ниже, неограничивающей целью настоящего изобретения является всасывающая щетка для пылесоса, содержащая кожух, имеющий всасывающее отверстие для втягивания воздуха и основной проход для воздуха, через который втекает воздух, втянутый через всасывающее отверстие, распознавательное устройство, расположенное на кожухе щетки и предназначенное для определения типа очищаемой поверхности, поднимающее устройство, предназначенное для передвижения нижней поверхности кожуха щетки ближе и дальше от очищаемой поверхности, и приводное устройство, работающее в зависимости от сигнала, генерируемого распознавательным устройством, и перемещающее поднимающее устройство, используя давление, создаваемое воздухом, протекающим через основной проход для воздуха.
Распознавательное устройство может содержать чувствительный элемент, расположенный в кожухе щетки, и поворотный элемент, расположенный на кожухе щетки, выполненный с возможностью поворота и содержащий контактирующую часть, расположенную в одном его конце, для вхождения в контакт с очищаемой поверхностью, и рабочую часть, расположенную на другом его конце, для включения и выключения чувствительного элемента, причем чувствительный элемент содержит оптический датчик, содержащий излучающую свет часть и принимающую свет часть.
В другом варианте выполнения чувствительный элемент может быть датчиком Холла с рабочей частью, выполненной из постоянного магнита, или микропереключателем.
В другом варианте выполнения распознавательный элемент может содержать чувствительный элемент, расположенный на кожухе щетки и выполненный с возможностью перемещения вверх и вниз, входя в соприкосновение с очищаемой поверхностью и отрываясь от нее, и содержащий рабочую часть для приведения в действие чувствительного элемента. Чувствительный элемент может также содержать микропереключатель, а поднимающий элемент может содержать штырь, на одном конце которого расположена поворотная часть, выполненная с возможностью контактирования с очищаемой поверхностью; на другом его конце расположена поддерживающая часть, выполненная с возможностью поддерживания поднимающего элемента и перемещения вверх и вниз относительно кожуха щетки; а в середине него расположена рабочая часть для управления микропереключателем, причем поднимающий элемент упруго толкается к очищаемой поверхности упругой пружиной, расположенной на поднимающем элементе между кожухом щетки и рабочей частью.
Поднимающая часть может содержать поднимающую пластину, выполненную с возможностью перемещения вверх и вниз и расположенную внутри кожуха щетки, и по меньшей мере одно ребро, расположенное на по меньшей мере одной продольной стороне поднимающей пластины и выполненное с возможностью соприкосновения с очищаемой поверхностью.
Приводное устройство может содержать перераспределяющую часть для прохода воздуха, выполненную так, что она образует перераспределяющий проход для воздуха, проточно сообщающийся с основным проходом для воздуха, часть, закрывающую проход для воздуха, выполненную с обеспечением открытия и закрытия перераспределяющего прохода для воздуха, чтобы обеспечить или предотвратить создание всасывающей силы в перераспределяющем проходе для воздуха или из него, и поднимающую рабочую часть пластины, выполненную с возможностью подъема или опускания поднимающей пластины при обеспечении или предотвращении создания всасывающей силы в перераспределяющем проходе для воздуха или из него. Перераспределяющая часть для прохода воздуха может содержать первую перераспределяющую направляющую потока воздуха и вторую перераспределяющую направляющую потока воздуха, расположенные на противоположных сторонах направляющей потока воздуха нижнего кожуха щетки, образуя, таким образом, основной проход для воздуха; и соединительную направляющую, расположенную ниже основного прохода для воздуха и образованную направляющей потока воздуха верхнего кожуха щетки с обеспечением соединения первой перераспределяющей направляющей потока воздуха и второй перераспределяющей направляющей потока воздуха в проточном сообщении.
Часть, закрывающая проход для воздуха, может содержать приводной двигатель, расположенный на одной стороне нижнего кожуха и выполненный с возможностью приведения в действие в соответствии с сигналом, генерируемым распознающим устройством, и пластину, закрывающую проход для воздуха, соединенную с приводной осью приводного двигателя, выполненную с возможностью поворота между открытым положением и закрытым положением, причем часть, закрывающая проход для воздуха, выполнена с возможностью открытия верхнего конца соединяющей направляющей в открытом положении и закрытия верхнего конца соединяющей направляющей в закрытом положении. Часть, закрывающая проход для воздуха, может также содержать останавливающую контрольную часть для управления углом, под которым часть, закрывающая проход для воздуха, поворачивается при открытии и закрытии верхнего конца соединяющей направляющей, кулачок с выступом, расположенный на одном конце пластины, закрывающей проход для воздуха, и конечный выключатель, выполненный с возможностью выключения и включения кулачком. Часть, закрывающая проход для воздуха, может также содержать часть, выключающую питание и расположенную на нижнем кожухе щетки, причем выключающая питание часть выполнена с возможностью соприкосновения с очищаемой поверхностью и отключения источника электроэнергии, получаемой приводным двигателем, когда выключающая питание часть не соприкасается с очищаемой поверхностью.
Поднимающая рабочая часть пластины может содержать первый цилиндр, выполненный в нижней части конца первой перераспределяющей направляющей воздуха так, что верхний конец первого цилиндра находится в проточном сообщении с перераспределяющим проходом для воздуха и нижний конец первого цилиндра открыт, второй цилиндр, выполненный на нижней части конца второй перераспределяющей направляющей потока воздуха так, что верхний конец второго цилиндра находится в проточном сообщении с перераспределяющим проходом для воздуха так, что нижний конец второго цилиндра открыт, первый поршень, выступающий вверх у первого конца передней поднимающей пластины с возможностью его введения в первый цилиндр и размещения в нем с возможностью скольжения, причем первый поршень выполнен с возможностью перемещения в поднятое положение, в котором закрываются верхние концы первого цилиндра, или в опущенное положение, в котором открывается верхний конец первого цилиндра в соответствии с давлением воздуха в основном проходе для воздуха, приложенном к первому цилиндру через перераспределяющий проход для воздуха, когда пластина, закрывающая проход для воздуха, находится в открытом положении или закрытом положении; второй поршень, выступающий вверх у второго конца передней поднимающей пластины с возможностью его введения во второй цилиндр и размещения в нем с возможностью скольжения, причем второй поршень выполнен с возможностью перемещения в поднятое положение, в котором закрываются верхние концы первого цилиндра, или в опущенное положение, в котором открывается верхний конец второго цилиндра в соответствии с давлением воздуха в основном проходе для воздуха, приложенном ко второму цилиндру через перераспределяющий проход для воздуха, когда пластина, закрывающая проход для воздуха, находится в открытом положении или закрытом положении; и упругий элемент, расположенный между верхним кожухом и поднимающей пластиной с возможностью упругого толкания поднимающей пластины с обеспечением сохранения первым и вторым поршнями опущенного положения, когда в основном проходе для воздуха не создается давление воздуха.
В соответствии с другим вариантом выполнения настоящего изобретения способ регулирования высоты всасывающей щетки для пылесоса включает определение типа очищаемой поверхности и регулирование расстояния между нижней поверхностью всасывающей щетки и очищаемой поверхностью в соответствии с определенным типом очищаемой поверхности, используя давление воздуха.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеперечисленные и другие аспекты и/или преимущества настоящего изобретения станут очевидными и наиболее понятными при последующем описании вариантов выполнения со ссылками на прилагаемые чертежи, на которых:
Фиг.1 изображает в аксонометрии всасывающую щетку для пылесоса в соответствии с иллюстративным вариантом выполнения настоящего изобретения;
Фиг.2 изображает в аксонометрии в разобранном виде всасывающую щетку, показанную на Фиг.1, от которой отсоединен кожух щетки;
Фиг.3А и 3В изображают вид сбоку, иллюстрирующий работу распознавательного устройства всасывающей щетки, показанной на Фиг.1;
ФИГ.4А и 4В изображают вид сбоку, иллюстрирующий работу модифицированного примера распознавательного устройства всасывающей щетки, показанной на Фиг.1;
ФИГ.5А и 5В изображают вид сбоку, иллюстрирующий работу другого модифицированного варианта распознавательного устройства всасывающей щетки, показанной на Фиг.1;
Фиг.6А и 6В изображают вид спереди, иллюстрирующий работу другого модифицированного варианта распознавательного устройства всасывающей щетки, показанной на Фиг.1;
ФИГ.7А и 7В изображают разрез по линии VII-VII на Фиг.2 собранной всасывающей щетки для иллюстрации работы части, закрывающей проход для воздуха приводного устройства всасывающей щетки, показанной на Фиг.1;
Фиг.8А и 8В изображают разрез по линиям VIII-VIII на Фиг.2, иллюстрирующий работу поднимающей пластины - рабочей части приводного устройства всасывающей щетки, показанной на Фиг.1; и
Фиг.9 является блок-схемой, иллюстрирующей пример регулирования высоты всасывающей щетки, показанной на Фиг.1.
ПОДРОБНОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНОГО ВАРИАНТА ВЫПОЛНЕНИЯ
Далее ссылки будут сделаны на варианты выполнения, не ограничивающие настоящее изобретение, путем ссылок на прилагаемые чертежи, на которых одинаковые номера позиций обозначают одинаковые части, элементы и конструкции.
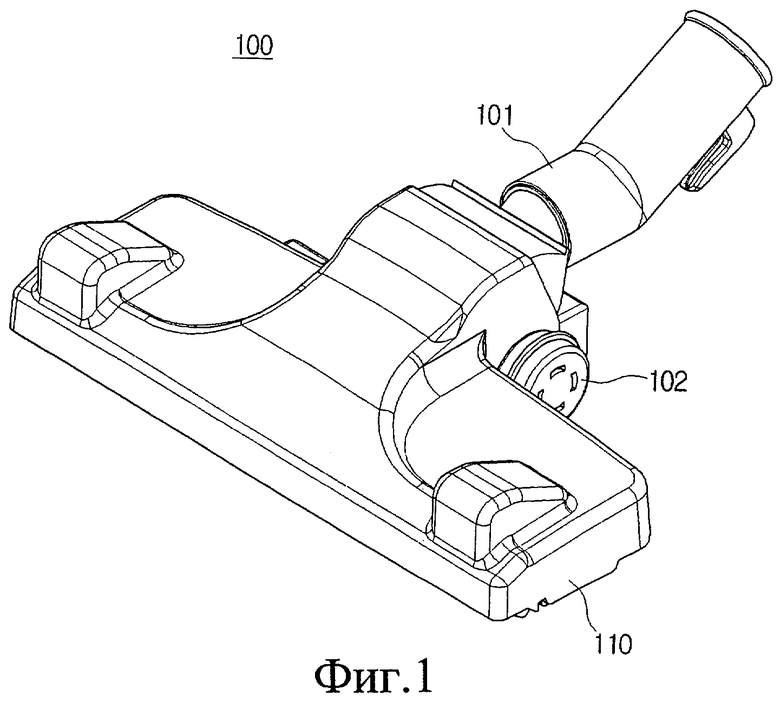
Фиг.1 изображает в аксонометрии всасывающую щетку 100 для пылесоса в соответствии с иллюстративным вариантом выполнения настоящего изобретения, а Фиг.2 изображает в аксонометрии в разобранном виде всасывающую щетку 100 в соответствии с Фиг.1, от которой отсоединен кожух 110 щетки.
Со ссылкой на Фиг.1 и 2 видно, что всасывающая щетка 100 для пылесоса содержит кожух 110 щетки, распознавательное устройство 120 и приводное устройство 160.
Кожух 110 щетки содержит верхний кожух 111 и нижний кожух 115. Верхний и нижний кожухи 111 и 115 закреплены и соединены друг с другом шурупами (не показаны) и фиксирующими выступами 116 (показаны только фиксирующие выступы нижнего кожуха). Нижний кожух 115 в процессе очистки обращен к очищаемой поверхности. Как показано на Фиг.7А и 7В, всасывающее отверстие 119, через которое воздух и пыль втягиваются с очищаемой поверхности, расположено продольно в передней части нижнего кожуха 115. Воздух и пыль, втянутые через всасывающее отверстие 119, направляются к удлиненному трубообразному соединителю 101 через направляющие 118 и 113 потока воздуха, расположенные в верхнем и нижнем кожухах 111 и 115. Направляющие 118 и 113 потока воздуха образуют основной проход 117 для воздуха всасывающей щетки 100.
Со ссылкой на Фиг.2 видно, что распознавательное устройство 120 расположено у нижнего кожуха 115 между колесами 102 всасывающей щетки и распознает, к какому типу относится очищаемая поверхность - твердый пол или ковер. Для этого распознавательное устройство 120 может содержать чувствительный элемент 122 и поворотный элемент 123, как показано на Фиг.3А и 3В.
Чувствительный элемент 122 расположен на фиксирующей пластине 121, и содержит оптический датчик 124, такой как инфракрасный датчик, имеющий излучающую свет часть и принимающую свет часть. Оптический датчик 124 электрически соединен с контроллером (не показан) и контрольной панелью (не показана) корпуса пылесоса (не показан) через провод, соединяющую розетку, и т.д.
Поворотный элемент 123 расположен на фиксирующей пластине 121 с возможностью поворота вокруг поворотной оси 123а. Поворотный элемент 123 на одном конце имеет контактную часть 123b, которая выполнена с возможностью вхождения в контакт с очищаемой поверхностью, а на другом конце имеет рабочую часть 123с, которая расположена с возможностью поворота между излучающей свет частью и принимающей свет частью оптического датчика 124,
Как показано на Фиг.3А, поворотный элемент 123 выполнен так, чтобы в случае, если очищаемая поверхность является твердым полом, контактная часть 123b расположена на расстоянии от очищаемой поверхности и рабочая часть 123с расположена в положении (далее называемое положение «ВЫКЛ») между излучающей свет частью и принимающей свет частью оптического датчика 124. Напротив, в случае если очищаемая поверхность является ковром, контактная часть 123b поворотного элемента 123 поднимается на высоту волокон «W», находящихся близко друг к другу на верхней поверхности ковра, как показано на Фиг.3В. В этом случае поворотный элемент 123 поворачивается на заранее определенный угол, в соответствии с высотой, на которую поднимается контактная часть 123b поворотного элемента 123. В результате рабочая часть 123с поворотного элемента 123 опускается и принимает положение (далее называемое положение «ВКЛ»), отличное от позиции «ВЫКЛ», между излучающей свет частью и принимающей свет частью оптического датчика 124. Когда оптический датчик 124 включается, контроллер (не показан) контролирует приводное устройство 160 для приведения в движение поднимающего устройства 140, как будет подробно описано далее.
Поворотный элемент 123 расположен так, что расстояние L1 от поворотной оси 123а до рабочей части 123 с больше, чем расстояние L2 от поворотной оси 123а до контактной части 123b. В иллюстративных вариантах выполнения на Фиг.3А и 3В расстояние L1 такое, что L1 примерно в 5 раз больше, чем расстояние L2. Соответственно, если контактную часть 123b поднять, например, на 1 мм, то рабочая часть 123с опускается до 5 мм. В результате, хотя высота «W» волокон, выполненных на верхней поверхности ковра, относительно мала, распознавательное устройство 120 может легче распознать, что очищаемая поверхность является ковром.
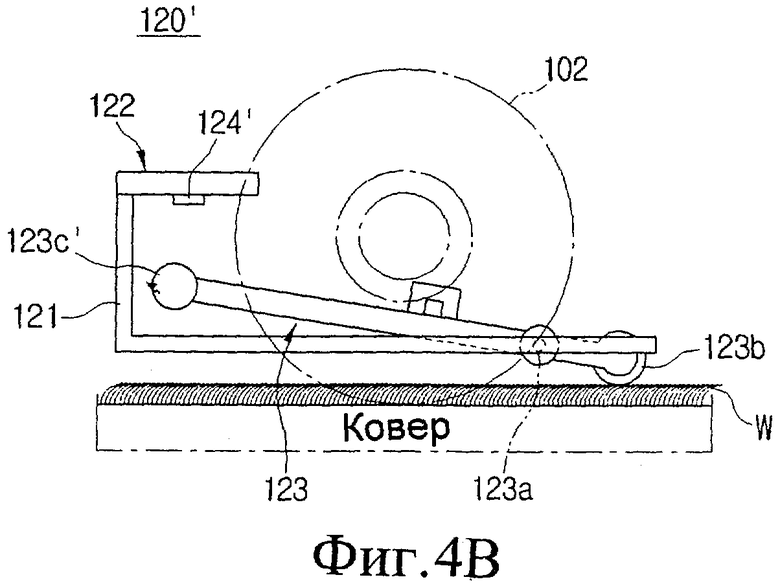
Несмотря на то что в приведенном выше описании было разъяснено и проиллюстрировано распознавательное устройство 120, содержащее чувствительный элемент 122, включающий оптический датчик 124, настоящее изобретение этим не ограничивается. Например, распознавательное устройство 120' может быть сконструировано в соответствии с Фиг.4А и 4В так, что чувствительный элемент 122 содержит датчик Холла 124'. В этом иллюстративном варианте выполнения чувствительный элемент 123с' поворотного элемента 123 содержит постоянный магнит. Распознавательное устройство 120' этого иллюстративного варианта выполнения приводится в действие довольно схожим образом с распознавательным устройством 120, с датчиком Холла 124' в положении «ВЫКЛ», когда чувствительный элемент 123с' поворотного элемента 123 опущен от датчика Холла 124'.
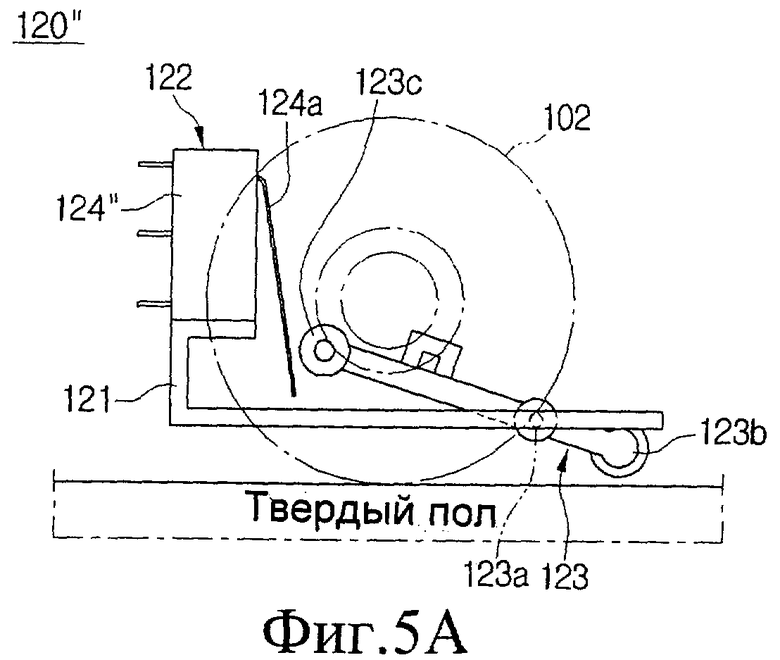
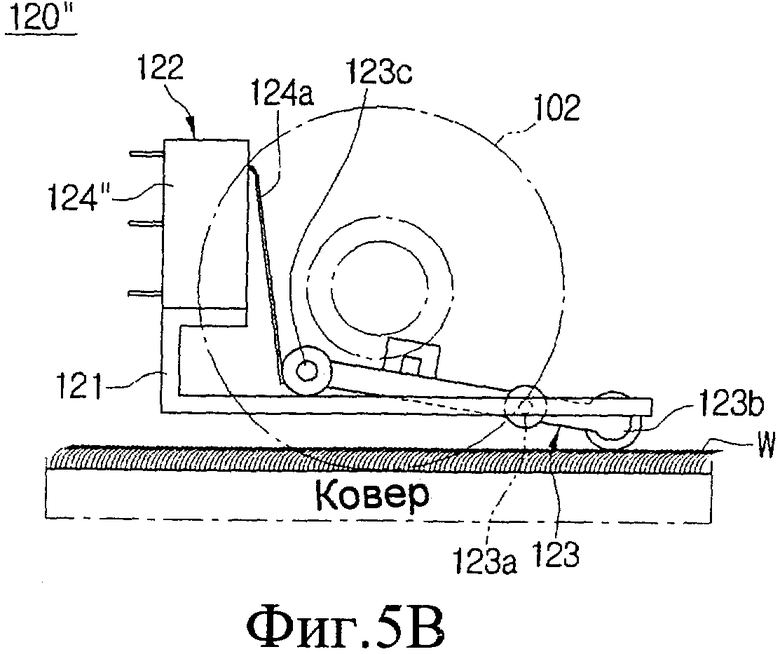
В другом иллюстративном варианте выполнения распознавательное устройство 120'' может быть выполнено так, как показано на Фиг.5А и 5В, так что чувствительный элемент 122 содержит микропереключатель 124'', имеющий контакт 124а переключателя. Распознавательное устройство 120'' этого иллюстративного варианта выполнения действует довольно схожим образом с распознавательным устройством 120, с микропереключателем 124'' в положении «ВКЛ», когда чувствительный элемент 123с' поворотного элемента 123 опущен и соприкасается с контактом 124а переключателя.
В еще одном иллюстративном варианте выполнения распознавательное устройство 120''' может быть выполнено так, как показано на Фиг.6А и 6В, в котором чувствительный элемент 122 расположен на фиксирующем элементе 121 и поднимающий элемент 123' расположен через фиксирующую пластину 121 нижнего кожуха 115 так, чтобы его можно было свободно перемещать вверх и вниз, в зависимости от соприкосновения с очищаемой поверхностью. Чувствительный элемент 122 этого варианта выполнения содержит микропереключатель 124''', имеющий контакт 124а' переключателя. Поднимающий элемент 123' содержит штырь, нижний конец которого содержит поворотную часть 123b', соприкасающуюся с очищаемой поверхностью, верхний конец содержит поддерживающую часть 123с'' для поддержания поднимающего элемента 123' фиксирующей пластины 121 нижнего кожуха 115, а середина содержит рабочую часть 123а' для приведения в действие контакта 124а' микропереключателя 124'''. Поднимающий элемент 123' упруго поджимается к очищаемой поверхности упругой пружиной 125, расположенной между рабочей частью 123а' и фиксирующей пластиной 121 нижнего кожуха 115. Распознавательное устройство 120''' этого иллюстративного варианта выполнения приводится в действие довольно схожим образом с распознавательным устройством 120, с микропереключателем 124''', когда рабочая часть 123а' поднимающего элемента 123 опущена от микропереключателя 124'''.
Снова со ссылкой на Фиг.2 видно, что поднимающее устройство 140 выполнено так, чтобы перемещать нижнюю поверхность нижнего кожуха 115 ближе или дальше от очищаемой поверхности, корректируя, таким образом, расстояние между очищаемой поверхностью и нижней поверхностью нижнего кожуха 115, т.е. высоту всасывающей щетки 100. Поднимающее устройство 140 содержит поднимающую пластину 141 и 2 ребра 145. Поднимающая пластина 141 выполнена так, чтобы перемещаться вверх и вниз относительно нижнего кожуха 115, и расположена между верхним и нижним кожухами 111 и 115. Поднимающая пластина 141 установлена так, что первый и второй поршни 175а и 175b (см. Фиг.2, 8А и 8В) части 171, действующей на поднимающую пластину, расположены с возможностью скольжения вверх и вниз соответственно в первом и втором цилиндрах 173а (только первый цилиндр показан на Фиг.8А и 8B). Первый и второй поршни 175а и 175b части 171, действующей на поднимающую пластину, выступают вниз от обоих концов поднимающей пластины 141.
Два ребра 145 установлены выступающими ниже установочных выемок спереди и сзади нижней поверхности поднимающей пластины 141. На Фиг.8А и 8B показано, что 2 ребра 145 расположены спереди и сзади нижней поверхности поднимающей пластины 141, но не ограничиваются этим. Например, лишь одно ребро может быть расположено спереди нижней поверхности поднимающей пластины 141.
Как показано на Фиг.7В и 8B, когда поднимающая пластина 141 находится в поднятом положении, ребра 145 перемещаются вверх так, что нижняя поверхность нижнего кожуха 115 придвигается близко к верхней поверхности волокон ковра, если очищаемая поверхность - ковер. Напротив, когда поднимающая пластина 141 находится в опущенном положении, ребра 145 выступают вниз от нижней поверхности нижнего кожуха 115, соприкасаясь с верхней поверхностью пола, так чтобы нижняя поверхность нижнего кожуха 115 отодвигалась от верхней поверхности пола.
Приводное устройство 160 приводится в действие в соответствии с создаваемым сигналом, когда оптический датчик 124 распознавательного устройства 120 включен или выключен, и заставляет поднимающее устройство 140 перемещать нижнюю поверхность нижнего кожуха 115 дальше или ближе к очищаемой поверхности посредством контроллера (не показан). Как показано на Фиг.2, приводное устройство 160 содержит перераспределяющую часть 128 для прохода воздуха, часть 161, закрывающую проход для воздуха, и часть 171, действующую на поднимающую пластину.
Как показано на Фиг.2, 7А и 8А, перераспределяющая часть 128 для прохода воздуха, образующая перераспределяющий проход 129 для воздуха, который может быть в проточном сообщении с основным проходом 117 для воздуха, содержит первую и вторую перераспределяющие направляющие 128а и 128b потока воздуха, каждая из которых расположена на стороне направляющей 118 потока воздуха нижнего кожуха 115, и соединительную направляющую 128с, расположенную под основным проходом 117 для воздуха. Каждая из первой и второй перераспределяющих направляющих 128а и 128b потока воздуха содержит соответственно первый или второй цилиндр (только первый цилиндр 173а показан на Фиг.8А и 8В) части 171, действующей на поднимающую пластину. Как показано на Фиг.8А и 8B, нижние концы первого и второго цилиндров открыты, а другой конец соединен с боковой стороной соединительной направляющей 128с. Соединительная направляющая 128с соединена у обоих концов с первой и второй перераспределяющими направляющими 128а и 128b потока воздуха. Верхний конец соединительной направляющей 128с открыт так, что перераспределяющий проход 129 для воздуха может быть в проточном сообщении с основным проходом 117 для воздуха.
Часть 161, закрывающая проход для воздуха, выполнена так, чтобы закрывать и открывать верхний конец соединительной направляющей, чтобы обеспечивать или предотвращать создание всасывающей силы в или из перераспределяющего прохода 129 для воздуха. Часть 161, закрывающая проход для воздуха, содержит приводной двигатель 163 и пластину 165, закрывающую проход для воздуха. Приводной двигатель 163 расположен на одной стороне нижней кожуха 115 и приводится в действие контроллером (не показан) в соответствии с генерируемым сигналом, когда оптический датчик 124 распознающего устройства 120 включен или выключен. Приводной двигатель 163 соединен с внешним источником питания или аккумулятором, установленным в корпусе пылесоса через часть, управляющую питанием (не показана) контроллера (не показан). Пластина 165, закрывающая проход для воздуха, выполнена так, чтобы поворачиваться между закрытым положением (см. ФИГ.7А и 8А) и открытым положением (см. Фиг.7В и 8В), так чтобы закрывать и открывать верхний конец соединяющей направляющей 128с, причем проход 129 для воздуха не находится в проточном сообщении с основным проходом 117 для воздуха, когда пластина 165, закрывающая проход для воздуха, находится в закрытом положении, и находится в проточном сообщении с основным проходом 117 для воздуха, когда пластина 165, закрывающая проход для воздуха, находится в открытом положении. Пластина 165, закрывающая проход для воздуха, соединена с приводной осью приводного двигателя 163 так, чтобы поворачиваться между открытым положением и закрытым положением посредством приводного двигателя 163. Пластина 165, закрывающая проход для воздуха, поддерживается у обоих концов с возможностью поворота первым и вторыми поддерживающими штырями 165а и 165b, расположенными с возможностью поворота у первой и второй опорных консолей.
Для контролирования угла, на который поворачивается пластина 165, закрывающая проход для воздуха, чтобы открывать или закрывать верхний конец соединительной направляющей 128с, у одного конца поддерживающего штыря 165b расположена останавливающая контрольная часть 167. Останавливающая контрольная часть 167 содержит кулачок 168 с выступом, расположенный у одного конца поддерживающего штыря 165b, и конечный переключатель 169, выполненный так, чтобы выключаться и включаться кулачком 168. Конечный переключатель 169 содержит первый и второй переключатели, имеющие контакты, расположенные под углом 90 градусов относительно друг друга так, что они включаются выступом кулачка каждый раз, когда кулачок 168 поворачивается на угол примерно 90 градусов. Соответственно, когда под управлением контроллера (не показан) вращается приводной двигатель 163, например, против часовой стрелки или по часовой стрелке так, что пластина 165, закрывающая проход для воздуха, принимает соответственно закрытое или открытое положение, в соответствии с сигналом, создаваемым оптическим датчиком 124 распознавательного устройства 120, и выступ кулачка 168 приводит в действие первый или второй переключатель конечного переключателя 169 так, что контроллер (не показан) перестает приводить в действие приводной двигатель 163, когда пластина 165, закрывающая проход для воздуха, достигает закрытого или открытого положения.
Со ссылкой на Фиг.2 видно, что часть 161, закрывающая проход для воздуха, содержит часть 180 отключения питания для предотвращения приведения в действие приводного двигателя 163, когда всасывающая щетка 100 отодвинута от очищаемой поверхности на заранее заданное расстояние. Часть отключения питания расположена на фиксирующей пластине 121 и выполнена так, чтобы отключать электрическое питание, поступающее к приводному двигателю 163 от аккумулятора или внешнего источника питания, когда всасывающая щетка 100 отодвинута от очищаемой поверхности на заранее заданное расстояние. Выключатель питания (не показан) находится на нижнем конце части 180 отключения питания и выполнен так, чтобы соприкасаться с очищаемой поверхностью. Соответственно, если всасывающая щетка 100 соприкасается с очищаемой поверхностью, выключатель питания также соприкасается с очищаемой поверхностью, обеспечивая, таким образом поступление электрического питания к приводному двигателю 163 от аккумулятора или внешнего источника питания. Напротив, если всасывающая щетка 100 отодвинута от очищаемой поверхности, а более конкретно, если временно поднята над очищаемой поверхностью на заранее заданное расстояние, выключатель питания отключается, чтобы разъединить электрическое соединение между приводным двигателем 163 и аккумулятором или внешним источником питания, предотвращая, таким образом, поступление электрического питания к приводному двигателю 163 от аккумулятора или от внешнего источника питания, предотвращая тем самым его от необязательной работы и вращения.
Часть 171, действующая на поднимающую пластину, выполнена так, чтобы поднимать и опускать поднимающую пластину 141, когда часть 161 закрытия прохода для воздуха соответственно открывает и закрывает верхний конец соединяющей направляющей 128с так, чтобы обеспечивать или предотвращать генерацию всасывающей силы в перераспределяющий проход 129 для воздуха или из него. Часть 171, действующая на поднимающую пластину, расположена между поднимающими пластинами 141 и между первой и второй перераспределяющими направляющими 128а и 128b. Как показано на Фиг.2, 7А и 8А, часть 171, действующая на поднимающую пластину, содержит первые и вторые цилиндры 173а (только первый цилиндр показан на Фиг.3А и 8В), первые и вторые поршни 175а и 175b и упругий элемент 177.
Первые и вторые цилиндры 173а выполнены в нижних частях у концов соответственно первой и второй перераспределяющих направляющих 128а и 128b потока воздуха. Каждый из первых и вторых цилиндров 173а находится в проточном сообщении с перераспределяющим проходом 129 для воздуха у верхнего конца каждого цилиндра. Нижний конец первого и второго цилиндров 172а открыт. Первые и вторые поршни 175а и 175b выступают вверх на концах передней поднимающей пластины 141 и расположены с возможностью скольжения соответственно в первом и втором цилиндрах 173а. Первые и вторые поршни 175а и 175b могут быть передвинуты в поднятое положение (см. Фиг.3В), в котором верхние концы первых и вторых цилиндров 173а закрываются или передвинуты в опущенное положение (см. Фиг.6А), в котором верхние концы первых и вторых цилиндров 173а открываются и находятся в проточном сообщении с перераспределяющим проходом 129 для воздуха.
Всасывающая сила всасывающего двигателя (не показан) корпуса пылесоса, т.е. давление воздуха, созданное в основном проходе 117 для воздуха, может быть приложено к первому и второму цилиндрам 173а через перераспределяющий проход 129 для воздуха, когда приводной двигатель 163 вращается так, что пластина 165, закрывающая проход для воздуха, находится в открытом положении, и, таким образом, всасывающая сила заставляет первые и вторые поршни 175а и 175b передвигаться в поднятое положение (см. Фиг.3В). Приводной двигатель 163 вращается так, что пластина 165, закрывающая проход для воздуха, находится в открытом положении когда сигнал, созданный оптическим датчиком 124 распознавательного устройства 120, находится во включенном состоянии, как описано выше. Когда это происходит, поднимающая пластина 141 поднимается вместе с первым и вторым поршнями 175а и 175b. В противном случае поднимающая пластина 141 опускается вместе с первым и вторым поршнями 175а и 175b, когда пластина 165, закрывающая проход для воздуха, находится в закрытом положении, что происходит, когда сигнал, созданный оптическим датчиком 124 распознавательного устройства 120, находится в выключенном состоянии, как описано выше. Когда пластина 165, закрывающая проход для воздуха, находится в закрытом положении, всасывающая сила в первом и втором цилиндрах 173а устраняется, обеспечивая, таким образом, передвижение первого и второго поршней 175а и 175b в опущенное положение (см. Фиг.6А).
Упругий элемент 177 упруго толкает поднимающую пластину 141 так, что первый и второй поршни 175а и 175b остаются в опущенном положении, когда всасывающая сила в первом и втором цилиндрах 173а устраняется. Как показано на Фиг.7А и 7В, упругий элемент 177 укреплен на опорной консоли между верхним кожухом 111 и поднимающей пластиной 141.
Как показано на Фиг.7А и 8B, если очищаемая поверхность - твердый пол, то всасывающая сила в основным проходе 117 для воздуха не прикладывается к первым и вторым цилиндрам 173а через перераспределяющий проход 129 для воздуха, поскольку приводной двигатель 163 вращается, например, против часовой стрелки для приведения пластины 165, закрывающей проход для воздуха, в закрытое положение. Это происходит, когда оптическим датчиком 124 распознавательного устройства 120 вырабатывается сигнал «ВЫКЛ». Соответственно, поднимающая пластина 141 остается в опущенном положении, где она прижимается и опускается посредством упругого элемента 177, а ребра 145 выступают вниз так, чтобы соприкасаться с верхней поверхностью твердого пола. Поэтому нижняя поверхность нижнего кожуха 115 отодвигается от верхней поверхности твердого пола.
Напротив, как показано на Фиг.7А и 8А, если очищаемая поверхность - ковер, то всасывающая сила в основном проходе 117 для воздуха не прикладывается к первому и второму цилиндрам 173а через перераспределяющий проход 129 для воздуха, поскольку приводной двигатель 163 вращается, например, по часовой стрелке для приведения пластины 165, закрывающей проход для воздуха, в открытое положение. Это происходит, когда оптическим датчиком 124 распознавательного устройства 120 вырабатывается сигнал «ВКЛ». Соответственно, первый и второй поршни 175а и 175b, расположенные с возможностью скольжения в первом и втором цилиндрах 173а, подтягиваются вверх в поднятое положение посредством всасывающей силы в главном проходе 117 для воздуха. В результате поднимающая пластина 141 остается в поднятом положении и действует против упругой силы упругого элемента 177 первым и вторым поршнями 175а и 175b, а ребра 145 перемещаются вверх в кожух 110 щетки. Поэтому нижняя поверхность нижнего кожуха 115 передвигается ближе к верхней поверхности волокон “W” ковра.
Далее, со ссылками на Фиг.1-3В и 7-11 будет подробно объяснена операция регулирования всасывающей щетки 100 для использования в пылесосе в соответствии с описанием, приведенным выше.
Когда всасывающий двигатель корпуса пылесоса приводится в действие после того, как включен пылесос, всасывающая щетка 100 помещается на очищаемую поверхность (S1). В результате пыль и/или грязь, находящаяся на очищаемой поверхности, втягивается через всасывающее отверстие 119 и основной проход 117 для воздуха благодаря всасывающей силе, создаваемой во всасывающем двигателе.
Распознавательное устройство 120 распознает, какой тип поверхности будет очищаться, т.е. является ли очищаемая поверхность ковром или твердым полом (S2). Если очищаемая поверхность определяется как ковер, контроллер (не показан) выполняет режим очистки ковра, в котором нижняя поверхность нижнего кожуха 115 кожуха 110 щетки передвигается ближе к верхней поверхности волокон «W» ковра (S3). Конкретно, оптический датчик 124 вырабатывает сигнал «ВКЛ», и контроллер (не показан) определяет, является ли положение пластины 165, закрывающей проход для воздуха, открытым в соответствии с сигналом «ВКЛ», сохраненным в памяти во время предыдущей операции очистки. Если сохраненное положение пластины 165, закрывающей проход для воздуха, определяется как открытое, контроллер (не показан) дает команду приводному двигателю 163 не приводиться в движение. Если сохраненное положение пластины 165, закрывающей проход для воздуха, определяется как закрытое, контроллер (не показан) управляет перемещением приводного двигателя 163 в одном направлении, например по часовой стрелке, чтобы поворачивать закрывающую пластину 165 прохода для воздуха в открытое положение, как показано на Фиг.7В. Когда выступ кулачка 168 переключает второй переключатель конечного переключателя 169 в положение «ВКЛ», контроллер (не показан) дает команду приводному двигателю 163 остановиться.
Когда пластина 165, закрывающая проход для воздуха, установлена в открытом положении, как описано выше, всасывающая сила в основном проходе 117 для воздуха прикладывается к первым и вторым цилиндрам 173а через перераспределяющий проход 129. Соответственно, как показано на Фиг.3В, первый и второй поршни 175а и 175b, расположенные с возможностью скольжения в первых и вторых цилиндрах 173а, перемещаются в поднятое положение посредством всасывающей силы в основном проходе 117 для воздуха. Поэтому поднимающая пластина 141 остается в поднятом положении, действуя против упругой силы упругого элемента 177 с использованием всасывающей силы, действующей на первый и второй поршни 175а и 175b. Ребра 145 также перемещаются вверх так, что нижняя поверхность нижнего кожуха 115 расположена близко к верхней поверхности волокон «W» ковра. В результате, нижний кожух 115 может оставаться в состоянии, в котором он тесно соприкасается с верхней поверхностью волокон «W» ковра, для сравнения с тем, когда очищаемая поверхность - твердый пол. Удерживая нижний кожух 115 в тесном контакте с верхней поверхностью волокон «W» ковра, всасывающая сила всасывающей щетки 100 у ковра увеличивается, обеспечивая для всасывающей щетки 100 тем самым более эффективное втягивание пыли и/или грязи, находящейся между волокнами «W» ковра.
Когда поднимающая пластина 141 находится в поднятом положении, пользователь может перемещать всасывающую щетку 100 по ковру (S5), чтобы очистить ковер. Во время очистки ковра пользователь может временно поднимать всасывающую щетку 100 от ковра, причем распознавательное устройство 120 изменяет свое состояние из состояния, изображенного на Фиг.3В, в состояние, изображенное на Фиг.3А, т.е. всасывающая щетка 100 изменяет режим на очистку твердого пола, потому что положение распознавательного устройства 120 теперь соответствует твердому полу. Когда пользователь поднимает всасывающую щетку 100 на заранее заданное расстояние, выключатель питания части 180 отключения питания (см. Фиг.2), расположенный во всасывающей щетке 100, выключается, предохраняя приводной двигатель 163 от необязательной работы и вращения.
Напротив, если на этапе 2 определения типа очищаемой поверхности последняя определяется как ковер, контроллер (не показан) выполняет режим очистки пола путем перемещения нижней поверхности нижнего кожуха 115 кожуха 110 щетки от верхней поверхности твердого пола (S4). Конкретно, оптический датчик 124 распознавательного устройства 120 создает сигнал «ВЫКЛ», а контроллер (не показан) определяет, было ли положение пластины 165, закрывающей проход для воздуха, закрытым в соответствии с сигналом «ВЫКЛ» во время предыдущей операции очистки. Если сохраненное в памяти положение пластины 165, закрывающей проход для воздуха, определено закрытым, контроллер (не показан) контролирует, чтобы приводной двигатель 163 не работал, а находился в режиме ожидания. Если сохраненное в памяти положение пластины 165, закрывающей проход для воздуха, определено открытым, то контроллер (не показан) управляет работой приводного двигателя 163 в противоположном направлении, т.е. против часовой стрелки, чтобы повернуть пластину 165, закрывающую проход для воздуха, в закрытое положение, как показано на Фиг.7А. Когда выступ кулачка 168 переключает второй переключатель конечного переключателя 169 в положение «ВКЛ», контроллер (не показан) дает сигнал приводному двигателю 163 остановиться.
Когда пластина 165, закрывающая проход для воздуха, находится в таком положении, как описано выше, всасывающая сила в основном проходе 117 для воздуха не прикладывается к первому и второму цилиндрам 173а через перераспределяющий проход 129 для воздуха. Соответственно, поднимающая пластина 141 остается в опущенном положении, в котором она прижимается и опускается упругим элементом 177, а ребра 145 выступают вниз, чтобы войти в контакт с верхней поверхностью твердого пола так, чтобы нижняя поверхность нижнего кожуха 115 оставалась на заранее заданном расстоянии от верхней поверхности твердого пола. Удерживая нижний кожух 115 на заранее заданном расстоянии от верхней поверхности твердого пола, вероятность прилипания нижнего кожуха к очищаемой поверхности уменьшается, и поэтому рабочее сопротивление всасывающей щетки 100 уменьшается.
Когда нижний кожух 115 удерживается на заранее заданном расстоянии от верхней поверхности твердого пола, пользователь может перемещать всасывающую щетку 100 по твердому полу (S5), чтобы очистить его. Во время очистки твердого пола контроллер (не показан) определяет, выключен ли пылесос. Если пылесос выключен, контроллер (не показан) заканчивает операцию очистки. Если пылесос не выключен, контроллер (не показан) повторяет этапы S2-S5.
Как можно видеть из приведенного выше описания, в соответствии с иллюстративными вариантами выполнения настоящего изобретения всасывающая щетка для пылесоса и способ регулирования ее высоты обеспечивают автоматическое регулирование расстояния между очищаемой поверхностью и нижней поверхностью кожуха щетки, в которой выполнено всасывающее отверстие, в зависимости от того, является ли очищаемая поверхность ковром или твердым полом.
Хотя варианты выполнения настоящего изобретения были описаны со ссылкой на конкретные варианты выполнения, дополнительные изменения и модификации вариантов выполнения станут очевидны для специалистов в этой области техники, когда они ознакомятся с сущностью изобретения. Поэтому предполагается, что прилагаемая формула изобретения должна включать как вышеописанные варианты выполнения, так и все изменения и модификации, соответствующие сущности и объему изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСАСЫВАЮЩАЯ ЩЕТКА ДЛЯ ПЫЛЕСОСА | 2008 |
|
RU2463945C2 |
| ПЫЛЕСОС | 2011 |
|
RU2542570C2 |
| ГОЛОВКА ПЫЛЕСОСА | 2011 |
|
RU2549056C2 |
| ГОЛОВКА ПЫЛЕСОСА | 2011 |
|
RU2543417C2 |
| НАСАДКА ПЫЛЕСОСА | 2017 |
|
RU2711159C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ, В ЧАСТНОСТИ ДЛЯ РОБОТОВ-ПЫЛЕСОСОВ | 2021 |
|
RU2822189C1 |
| ЦИКЛОННЫЙ УЗЕЛ И УСТРОЙСТВО ДЛЯ СБОРА ЗАГРЯЗНЕНИЙ, СОДЕРЖАЩЕЕ ЦИКЛОННЫЙ УЗЕЛ | 2006 |
|
RU2326579C2 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2008 |
|
RU2433779C1 |
| ВСАСЫВАЮЩАЯ НАСАДКА ДЛЯ ПЫЛЕСОСА (ВАРИАНТЫ) И ПЫЛЕСОС С ТАКОЙ НАСАДКОЙ | 2013 |
|
RU2540383C2 |
| ЦИКЛОННОЕ ПЫЛЕОТДЕЛЯЮЩЕЕ УСТРОЙСТВО ПЫЛЕСОСА | 2008 |
|
RU2374978C2 |










Предложены всасывающая щетка, используемая в пылесосе, и способ регулирования ее высоты. Изобретение направлено на создание всасывающей щетки с возможностью автоматического регулирования расстояния между очищаемой поверхностью и нижней поверхностью нижнего кожуха щетки, причем всасывающее отверстие выполнено в соответствии с типом очищаемой поверхности - ковром или твердым полом. Всасывающая щетка содержит кожух, имеющий всасывающее отверстие для втягивания воздуха и основной проход для воздуха, через который втекает воздух, втянутый через всасывающее отверстие, распознавательное устройство, расположенное на кожухе щетки и предназначенное для определения типа очищаемой поверхности, поднимающее устройство, предназначенное для перемещения нижней поверхности кожуха щетки ближе и дальше от очищаемой поверхности, и приводное устройство, работающее в зависимости от сигнала, создаваемого распознавательным устройством, и перемещающее поднимающее устройство, используя давление воздуха, создаваемое воздухом, текущим через основной проход для воздуха. 2 н. и 15 з.п. ф-лы, 15 ил.
1. Всасывающая щетка, используемая в пылесосе, содержащая кожух, имеющий всасывающее отверстие для втягивания воздуха и основной проход для воздуха, через который входит воздух, втянутый через всасывающее отверстие, распознавательное устройство, расположенное на кожухе щетки и предназначенное для распознания типа очищаемой поверхности, поднимающее устройство, предназначенное для перемещения нижней поверхности кожуха щетки ближе к очищаемой поверхности и дальше от нее, и приводное устройство, работающее в зависимости от сигнала, создаваемого распознавательным устройством, и перемещающее поднимающее устройство, используя давление воздуха, создаваемое воздухом, проходящим через основной проход для воздуха.
2. Всасывающая щетка по п.1, в которой распознавательное устройство содержит чувствительный элемент, расположенный в кожухе щетки, и поворотный элемент, расположенный на кожухе щетки с возможностью поворота и содержащий контактирующую часть, расположенную на одном его конце и предназначенную для вхождения в контакт с очищаемой поверхностью, и рабочую часть, расположенную на другом его конце и предназначенную для включения и выключения чувствительного элемента.
3. Всасывающая щетка по п.2, в которой чувствительный элемент содержит оптический датчик, содержащий излучающую свет часть и принимающую свет часть.
4. Всасывающая щетка по п.2, в которой чувствительный элемент содержит датчик Холла, а рабочая часть поворотного элемента содержит постоянный магнит.
5. Всасывающая щетка по п.2, в которой чувствительный элемент содержит микропереключатель.
6. Всасывающая щетка по п.1, в которой распознавательный элемент содержит чувствительный элемент, расположенный на кожухе щетки, и поднимающий элемент, расположенный на кожухе щетки и выполненный с возможностью перемещения вверх и вниз, входя в соприкосновение и отрываясь от очищаемой поверхности, и содержащий рабочую часть для приведения в действие чувствительного элемента.
7. Всасывающая щетка по п.6, в которой чувствительный элемент содержит микропереключатель, а поднимающий элемент содержит штырь, на одном конце которого расположена поворотная часть, выполненная с возможностью вхождения в контакт с очищаемой поверхностью, на другом его конце расположена поддерживающая часть, выполненная с возможностью поддерживания поднимающего элемента и перемещения вверх и вниз относительно кожуха щетки, а в его середине расположена рабочая часть для управления микропереключателем, причем поднимающий элемент упруго толкается к очищаемой поверхности упругой пружиной, расположенной на поднимающем элементе между кожухом щетки и рабочей частью.
8. Всасывающая щетка по п.1, в которой поднимающий элемент содержит поднимающую пластину, выполненную с возможностью перемещения вверх и вниз и расположенную внутри кожуха щетки, и по меньшей мере одно ребро, расположенное на по меньшей мере одной продольной стороне поднимающей пластины и выполненное с возможностью вхождения в контакт с очищаемой поверхностью.
9. Всасывающая щетка по п.8, в которой приводное устройство содержит перераспределяющую часть для прохода воздуха, выполненную с образованием перераспределяющего прохода для воздуха, проточно сообщающегося с основным проходом для воздуха, часть, закрывающую проход для воздуха, выполненную с возможностью открытия и закрытия перераспределяющего прохода для воздуха с обеспечением или предотвращением создания всасывающей силы в перераспределяющий проход для воздуха или из него, и часть, действующую на поднимающую пластину, выполненную с возможностью подъема или опускания поднимающей пластины, когда обеспечивается или предотвращается создание всасывающей силы в перераспределяющий проход для воздуха или из него.
10. Всасывающая щетка по п.9, в которой перераспределяющая часть для прохода воздуха содержит первую перераспределяющую направляющую потока воздуха и вторую перераспределяющую направляющую потока воздуха, расположенные на противоположных друг другу сторонах направляющей потока воздуха нижнего кожуха щетки, образуя, таким образом, основной проход для воздуха, и соединительную направляющую, расположенную ниже основного прохода для воздуха и образованную направляющей потока воздуха верхнего кожуха щетки с обеспечением соединения первой перераспределяющей направляющей потока воздуха и второй перераспределяющей направляющей потока воздуха с созданием проточного сообщения.
11. Всасывающая щетка по п.9, в которой часть, закрывающая проход для воздуха, содержит приводной двигатель, расположенный на одной стороне нижнего кожуха и выполненный с возможностью приведения в действие в соответствии с сигналом, создаваемым распознающим устройством, и пластину, закрывающую проход для воздуха, соединенную с приводной осью приводного двигателя и выполненную с возможностью поворота между открытым положением и закрытым положением, причем пластина, закрывающая проход для воздуха, выполнена с возможностью открытия верхнего конца соединяющей направляющей при нахождении в открытом положении и с возможностью закрытия этого конца при нахождении в закрытом положении.
12. Всасывающая щетка по п.11, в которой часть, закрывающая проход для воздуха, содержит останавливающую контрольную часть, предназначенную для управления углом, на который поворачивается пластина, закрывающая проход для воздуха, для открытия и закрытия верхнего конца соединяющей направляющей.
13. Всасывающая щетка по п.12, в которой останавливающая контрольная часть содержит кулачок с выступом, расположенный на одном конце пластины, закрывающей проход для воздуха, и конечный выключатель, выполненный с возможностью выключения и включения кулачком.
14. Всасывающая щетка по п.11, в которой часть, закрывающая проход для воздуха, содержит выключающую питание часть, расположенную на нижнем кожухе щетки и выполненную с возможностью вхождения в контакт с очищаемой поверхностью и отключения источника питания, подаваемого к приводному двигателю, когда выключающая питание часть не соприкасается с очищаемой поверхностью.
15. Всасывающая щетка по п.11, в которой часть, действующая на поднимающую пластину, содержит первый цилиндр, выполненный в нижней части конца первой перераспределяющей направляющей воздуха так, что верхний конец первого цилиндра проточно сообщается с перераспределяющим проходом для воздуха, а его нижний конец открыт, второй цилиндр, выполненный в нижней части конца второй перераспределяющей направляющей потока воздуха так, что верхний конец второго цилиндра проточно сообщается с перераспределяющим проходом для воздуха, а его нижний конец открыт, первый поршень, выступающий вверх у первого конца передней поднимающей пластины, выполненный с возможностью его введения в первый цилиндр и размещения в нем с возможностью скольжения, причем первый поршень выполнен с возможностью перемещения в поднятое положение, в котором закрываются верхние концы первого цилиндра, или в опущенное положение, в котором открывается верхний конец первого цилиндра, в соответствии с давлением воздуха в основном проходе для воздуха, приложенном к первому цилиндру через перераспределяющий проход для воздуха, когда пластина, закрывающая проход для воздуха, находится в открытом положении или в закрытом положении, второй поршень, выступающий вверх у второго конца передней поднимающей пластины, выполненный с возможностью его введения во второй цилиндр и размещения в нем с возможностью скольжения, причем второй поршень выполнен с возможностью перемещения в поднятое положение, в котором закрываются верхние концы второго цилиндра, или в опущенное положение, в котором открывается верхний конец второго цилиндра, в соответствии с давлением воздуха в основном проходе для воздуха, приложенном ко второму цилиндру через перераспределяющий проход для воздуха, когда пластина, закрывающая проход для воздуха, находится в открытом положении или в закрытом положении, и упругий элемент, расположенный между верхним кожухом и поднимающей пластиной с обеспечением упругого толкания поднимающей пластины так, чтобы первый и второй поршни оставались в опущенном положении, когда в основном проходе для воздуха не создается давление воздуха.
16. Способ регулирования высоты всасывающей щетки для пылесоса, включающий определение типа очищаемой поверхности и регулирование расстояния между нижней поверхностью всасывающей щетки и очищаемой поверхностью в соответствии с определенным типом очищаемой поверхности, используя давление воздуха.
17. Способ по п.16, в котором при указанном регулировании создают или предотвращают проточное сообщение между перераспределяющим проходом для воздуха и основным проходом для воздуха, расположенными во всасывающей щетке, в соответствии с определенным типом очищаемой поверхности, и поднимают или опускают поднимающую пластину с использованием давления воздуха, создаваемого при создании проточного сообщения между перераспределяющим проходом для воздуха и основным проходом для воздуха, причем поднимающая пластина выполнена с возможностью подъема и опускания нижней поверхности всасывающей щетки относительно очищаемой поверхности и содержит по меньшей мере одно ребро, выполненное с возможностью вхождения в контакт с очищаемой поверхностью.
| US 4977639 А, 18.12.1990 | |||
| JP 2052624 А, 22.02.1990 | |||
| СПОСОБ ПОЛУЧЕНИЯ ОЛЕФИНОВ С.—Cg | 0 |
|
SU382598A1 |
| KR 20060004262 А, 12.01.2006. | |||

