Предлагаемое изобретение относится к сельскохозяйственному машиностроению, а именно к машинам со шнековым высевающим аппаратом для дифференцированного внесения минеральных удобрений.
Известен шнековый высевающий аппарат [авт. св. СССР №1423030, кл. А01C 15/00, БИ №34, 15.09.88], содержащий поворотный кожух, внутри которого размещен шнек. В нижней части кожуха имеются высевные отверстия, перекрываемые щитком. В кузове размещен подающий транспортер и дозирующее устройство, которое соединено с поворотным кожухом при помощи гидроцилиндра, рабочие полости которого через отверстие посредством золотникового устройства соединены с гидросистемой аппарата. На торцах кожуха установлены выключатели, включенные в электрическую цель золотника.
Недостатком данного устройства является невозможность осуществления автоматического регулирования нормы высеваемых компонентов, а также то, что поворотом кожуха гидроцилиндром не обеспечивается равномерное внесение удобрений при изменении нормы.
Известно также устройство [авт. св. СССР №1501949, кл. А01С 15/00, БИ №31, 23.08.89], содержащее поворотный кожух, состоящий из подвижных и неподвижных секций, и имеющих отверстия, внутри которого расположен шнек. Поворотный кожух кинематически связан рычажной системой, состоящей из рычага, тяг и зубчатого сектора с дозирующим устройством, расположенным на задней стенке, при этом каждая секция связана с общей продольной тягой, один конец которой закрепляется на неподвижной периферийной секции.
Недостатком данного устройства является то, что контроль равномерности внесения удобрений требует значительных затрат времени, а также снижается производительность из-за периодических остановок для регулировки нормы внесения. Кроме того, в нем отсутствует устройство для автоматического изменения нормы высева.
Наиболее близким техническим решением, выбранным в качестве прототипа, является устройство [патент РФ №2244395, кл. А01С 15/00, БИ №2, 20.01.2005], содержащее бункер, поворотный кожух, выполненный в виде полого цилиндра с высевными окнами, расположенными по винтовой линии, внутри которого расположены спирали, имеющие левую и правую навивки, заборные части которых расположены в бункере. Бункер разделен на отсеки перегородками, установленными с возможностью их поворота относительно осей, расположенных параллельно оси спиралей. В нижней части отсеков установлены дозаторы, управление которыми осуществляет бортовая микроЭВМ, состоящая из индуктивных датчиков и исполнительных механизмов. При этом блок управления выполнен на основе микропроцессорного контроллера, к первому входу которого подключена радионавигационная система, а ко второму входу - индуктивные бесконтактные датчики положения дозатора; к первому и последующим выходам блока управления подключены исполнительных механизмы. Число схем управления и исполнительных механизмов равно числу отсеков бункера.
Недостатком данного устройства является снижение равномерности распределения удобрений при изменении нормы высева, сопровождающем дифференцированное внесение удобрений.
Предлагаемым изобретением решается задача повышения равномерности распределения минеральных удобрений в условиях дифференцированного их внесения.
Для достижения этого технического результата предлагается устройство, содержащее бункер, кожух, выполненный в виде полого цилиндра с высевным отверстием, расположенным по винтовой линии. Внутри кожуха размещена спираль, заборная часть которой расположена в бункере, а в его нижней части установлен дозатор. Управление дозатором осуществляет система автоматического управления, состоящая из индуктивного датчика и исполнительного механизма, причем блок управления выполнен на основе микропроцессорного контроллера. К первому входу блока управления подключена навигационная система, а ко второму - индуктивный бесконтактный датчик положения дозатора. К первому и второму выходам блока управления подключены входы схемы управления, а к ее выходу подключен исполнительный механизм. Кожух выполнен из упругого материала и установлен с возможностью независимого поворота подающего и периферийного концов вокруг продольной оси. Подающий конец кожуха кинематически связан с первым исполнительным механизмом, который через схему управления подключен к третьему и четвертому выходам блока управления. Периферийный конец кожуха кинематически связан с другим исполнительным механизмом, который через схему управления подключен к пятому и шестому выходам блока управления. Третий и четвертый входы блока управления связаны с датчиками высева, расположенными под высевным отверстием, соответственно, в подающей и периферийной частях кожуха.
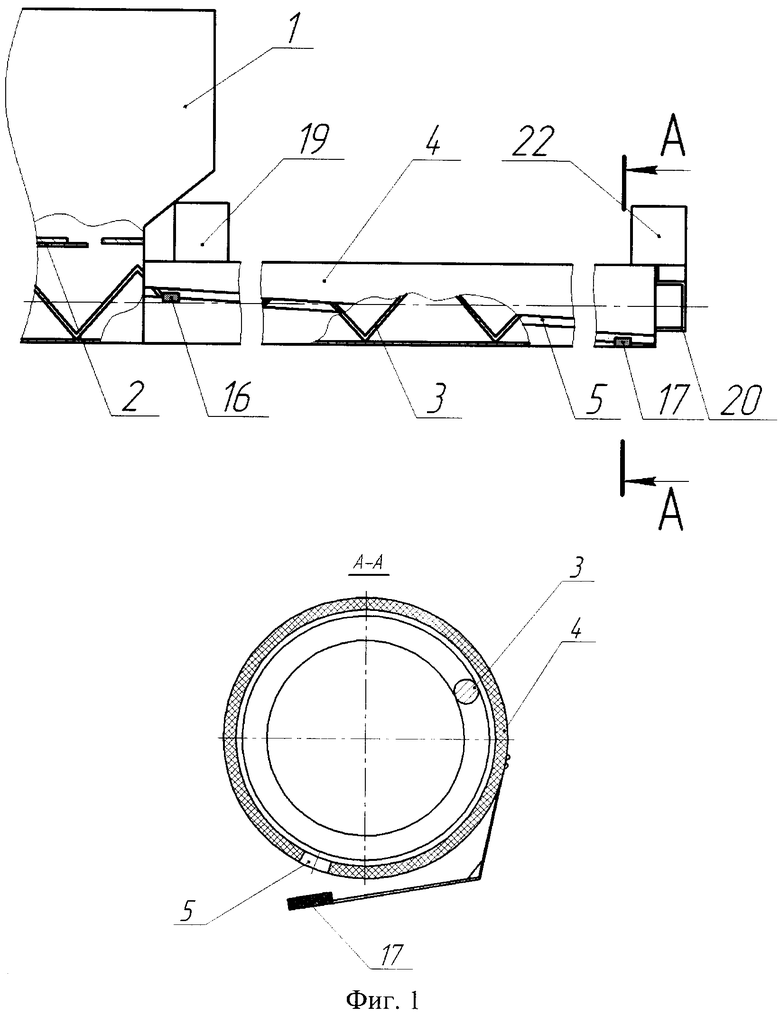
Изобретение поясняется чертежами. На фиг.1 представлен общий вид туко-высевающего аппарата; на фиг.2 - функциональная схема устройства управления; на фиг.3 - схема управления исполнительным механизмом; на фиг.4 - кинематическая схема исполнительного механизма положения дозатора; на фиг.5 - кинематическая схема исполнительного механизма поворота кожуха.
Туковысевающий аппарат содержит (фиг.1) бункер 1 с дозатором 2, управление которым осуществляется системой автоматического управления. Спираль 3 заключена в кожух 4, выполненный в виде полого цилиндра и изготовленный из упругого материала, таким образом, что ее заборная часть расположена в бункере 1. На кожухе выполнено высевное отверстие 5, расположенное по винтовой линии. Управление положением высевного отверстия 5 путем поворота или скручивания кожуха 4 осуществляется системой автоматического управления.
Система автоматического управления дозатором 2 состоит из блока управления 6 (фиг.2), выполненного на основе микропроцессорного контроллера, к первому входу которого подключена навигационная система 7, а ко второму - индуктивный бесконтактный датчик 8 положения дозатора. К первому и второму выходам блока управления 6 подключены первый и второй входы схемы управления 9, а к выходу схемы управления 9 подключен исполнительный механизм 10.
Схема управления 9 представляет собой (фиг.3) две транзисторные оптопары, к выходам которых подключены реле, через контакты которых включен электродвигатель постоянного тока 11 исполнительного механизма 10.
Исполнительный механизм 10 управления положением дозатора 2 представляет собой (фиг.4) редуктор 12, червячное колесо 13 которого кинематически связано с рейками 14 дозатора 2, а червяк 15 - с валом электродвигателя постоянного тока 11.
Система автоматического управления положением кожуха 4 состоит из блока управления 6, к третьему и четвертому входам которого подключены два датчика высева 16 и 17, расположенные соответственно в подающей и периферийной частях кожуха 4. К третьему и четвертому выходам блока управления 6 подключены первый и второй входы схемы управления 18, а к ее выходу подключен исполнительный механизм 19 управления положением подающей части кожуха 4, жестко закрепленный на раме 20 туковысевающего аппарата. К пятому и шестому выходам блока управления 6 подключены первый и второй входы схемы управления 21, а к ее выходу подключен исполнительный механизм 22 управления положением периферийной части кожуха 4, жестко закрепленный на раме 20 туковысевающего аппарата.
Схемы управления 18 и 21 представляют собой две транзисторные оптопары, к выходам которых подключены реле, через контакты которых включены электродвигатели постоянного тока исполнительных механизмов 19 и 22.
Каждый из исполнительных механизмов 19 и 22 управления положением кожуха шнека представляет собой (фиг.5) редуктор 23, червячное колесо 24 которого кинематически связано с концом кожуха 4, а червяк 25 с валом электродвигателя постоянного тока 26, который жестко закреплен на раме 20 высевающего аппарата.
Устройство работает следующим образом.
До начала движения машины дозатор 2 находится в закрытом состоянии. При движении положение и координаты машины на поле определяются навигационной системой 7 и передаются блоку управления 6, в котором на основании агрохимической карты поля определяется необходимая норма высева удобрений Qзад.
В зависимости от степени открытия дозатора 2, определяемой индуктивным бесконтактным датчиком 8 положения дозатора 2, блок управления 6 вычисляет величину текущей нормы высева удобрений Qтек, которая находится в функциональной зависимости со степенью открытия дозатора 2.
По полученным данным вычисляется разность заданной и текущей нормы высева ΔQ=Qзад-Qтек.
Если полученное значение ΔQ не превышает предельно допустимого отклонения нормы высева [ε], то производится повторный опрос навигационной системы 7 и индуктивного бесконтактного датчика 8 положения дозатора 2, на основании данных которых вновь определяется необходимая Qзад и текущая Qтех нормы высева удобрений. Опрос и расчеты продолжаются до тех пор, пока разность значений ΔQ не превысит предельно допустимое отклонение [ε].
В случае, когда разность ΔQ превышает предельно допустимое отклонение [ε], определяется знак этой разности.
Если разность ΔQ положительна, то блок управления 6 формирует сигнал на первый выход на включение через схему управления 9 исполнительного механизма 10 на открытие дозатора 2.
Если разность ΔQ отрицательна, то блок управления 6 формирует сигнал на второй выход на включение через схему управления 9 исполнительного механизма 10 на закрытие дозатора 2.
Одновременно с регулировкой происходит дальнейший опрос навигационной системы 7 и индуктивного бесконтактного датчика 8 положения дозатора 2 и вычисление разности норм высева в аналогичной последовательности. Исполнительный механизм 10 остается включенным до тех пор, пока разность показаний ΔQ не будет меньше предельно допустимого отклонения. В этом случае схема управления 9 прекращает подачу сигнала на включение исполнительного механизма 10.
Далее через дозатор удобрения подаются в кожух 4 и высеваются через высевное отверстие 5 по всей длине кожуха 4. При этом удобрения попадают на датчик 16 высева удобрений, расположенный в подающей части кожуха 4. По величине показаний датчика 16 высева удобрений блок управления 6 вычисляет текущую норму высева удобрений q1 в этой части кожуха 4, находящуюся в функциональной зависимости с показанием датчика 16 высева.
После этого вычисляется разность норм высева ΔQ1=Qзад-q1.
Если полученное значение ΔQ1 не превышает предельно допустимого отклонения норм высева [ε1], то производится повторный опрос навигационной системы 7 и датчика 16 высева удобрений, расположенного в подающей части кожуха 4, на основании данных которых определяются нормы высева удобрений Qзад и q1. Опрос и расчеты продолжаются до тех пор, пока разность значений ΔQ1 не превысит предельно допустимое отклонение [ε1].
В случае, когда разность ΔQ1 превышает допустимое отклонение [ε1], определяется знак этой разности.
Если разность ΔQ1 положительна, то блок управления 6 формирует сигнал на третий выход на включение через схему управления 18 исполнительного механизма 19, расположенного в подающей части кожуха 4, на его поворот в направлении, противоположном направлению вращения спирали 3.
Если разность ΔQ1 отрицательна, то блок управления 6 формирует сигнал на четвертый выход на включение через схему управления 18 исполнительного механизма 19, расположенного в подающей части кожуха 4, на его поворот в направлении вращения спирали 3.
Одновременно с регулировкой происходит дальнейший опрос навигационной системы 7 и датчика 16 высева удобрений, расположенного в подающей части кожуха 4, и определение норм высева удобрений Qзад и q1 в аналогичной последовательности. Исполнительный механизм 19, расположенный в подающей части кожуха, остается включенным до тех пор, пока разность показаний ΔQ1 не будет меньше предельно допустимого отклонения [ε1]. В этом случае схема управления 18 прекращает подачу сигнала на включение исполнительного механизма 19.
Одновременно с этим высеваемый материал через высевное отверстие 5 кожуха 4 попадает на датчик 17 высева удобрений, расположенный в периферийной части кожуха 4. По показаниям датчиков 16 и 17 высева удобрений, расположенных соответственно в подающей и периферийной частях кожуха 4, блок управления 6 вычисляет текущие нормы высева удобрений q1 и q2 в этих частях кожуха, находящиеся в функциональной зависимости с показаниями датчиков 16 и 17 высева.
После этого вычисляется разность норм высева Δq=q1-q2.
Если Δq не превышает предельно допустимого значения [ε2], то производится повторный опрос датчиков 16 и 17 высева удобрений и вычисление норм высева q1 и q2. Опрос продолжается до тех пор, пока разность сигналов Δq не превысит предельно допустимое отклонение [ε2].
В случае, когда разность сигналов Δq превышает предельно допустимое отклонение [ε2], то определяется знак этой разности.
Если разность Δq положительна, то блок управления 6 формирует сигнал нанятый выход на включение через схему управления 21 исполнительного механизма 22, расположенного в периферийной части кожуха 4, на поворот этой части в направлении вращения спирали 3.
Если разность Δq отрицательна, то блок управления 6 формирует сигнал на шестой выход на включение через схему управления 21 исполнительного механизма 22, расположенного в периферийной части кожуха 4, на поворот этой части в направлении, противоположном направлению вращения спирали 3.
Одновременно с регулировкой происходит дальнейший опрос датчиков 16 и 17 и вычисление текущих норм высева удобрений в разных частях кожуха в аналогичной последовательности. Исполнительный механизм 22, расположенный в периферийной части кожуха 4, остается включенным до тех пор, пока разность показаний Δq не будет меньше предельно допустимого отклонения [ε2]. В этом случае схема управления 21 прекращает подачу сигнала на включение исполнительного механизма 22.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПИРАЛЬНО-ШНЕКОВЫЙ СМЕСИТЕЛЬ-РАЗБРАСЫВАТЕЛЬ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2003 |
|
RU2244395C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОЦЕССОМ ВЫСЕВА МИНЕРАЛЬНЫХ УДОБРЕНИЙ ШНЕКОВЫМ ВЫСЕВАЮЩИМ АППАРАТОМ | 1998 |
|
RU2137338C1 |
| СПИРАЛЬНО-ШНЕКОВЫЙ СМЕСИТЕЛЬ-РАЗБРАСЫВАТЕЛЬ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2012 |
|
RU2533909C2 |
| Устройство точечного дозированного внесения минерального гранулированного удобрения в почву | 2022 |
|
RU2820668C2 |
| Мелиоративный удобритель | 2017 |
|
RU2649339C1 |
| АГРЕГАТ ДЛЯ ВНЕСЕНИЯ В ПОЧВУ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2013 |
|
RU2524372C1 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ ВЫСЕВАЮЩЕГО АППАРАТА ПНЕВМАТИЧЕСКОЙ СЕЯЛКИ | 2023 |
|
RU2824462C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СЕЛЬХОЗМАШИНЫ | 2011 |
|
RU2489832C1 |
| Пневматическая сеялка | 1981 |
|
SU969190A1 |
| Пневматическая сеялка для дозирования сыпучих материалов | 1981 |
|
SU1034631A1 |




Изобретение относится к области сельскохозяйственного машиностроения, а именно к машинам со шнековым высевающим аппаратом для дифференцированного внесения минеральных удобрений. Устройство содержит бункер с дозатором в нижней его части, в котором поперек движения установлена спираль, заключенная в цилиндрический кожух с высевным спиральным отверстием. Оно также включает в себя датчик положения дозатора, два датчика высева, расположенные под высевным отверстием в разных частях кожуха, блок управления, навигационную систему, исполнительные механизмы управления положениями дозатора и кожуха, а также схемы управления исполнительными механизмами. При работе устройства текущая норма внесения удобрений, определяемая датчиком положения дозатора, сравнивается с требуемой нормой, определяемой на основании заложенной в блок управления агрохимической карты поля, и по результату сравнения корректируется положение дозатора. Одновременно с этим нормы внесения удобрений с датчиков высева, установленных в подающей и периферийной частях кожуха, сравниваются между собой и с требуемой нормой, и по результату сравнения путем поворота и скручивания кожуха корректируется расположение высевного отверстия. Изобретение позволит повысить равномерность высева и исключить затраты времени на настройку, регулировку и контроль за нормой высева. 5 ил.
Туковысевающий аппарат, содержащий бункер, кожух, выполненный в виде полого цилиндра с высевным отверстием, расположенным по винтовой линии, внутри кожуха размещена спираль, заборная часть которой расположена в бункере, а в его нижней части установлен дозатор, управление которым осуществляет система автоматического управления, состоящая из индуктивного датчика и исполнительного механизма, причем блок управления выполнен на основе микропроцессорного контроллера, к первому входу которого подключена навигационная система, а ко второму входу - индуктивный бесконтактный датчик положения дозатора, к первому и второму выходам блока управления подключены входы схемы управления, а к ее выходу подключен исполнительный механизм, отличающийся тем, что кожух выполнен из упругого материала и установлен с возможностью независимого поворота подающего и периферийного концов вокруг продольной оси, причем подающий конец кожуха кинематически связан с первым исполнительным механизмом, который через схему управления подключен к третьему и четвертому выходам блока управления, периферийный конец кожуха кинематически связан с другим исполнительным механизмом, который через схему управления подключен к пятому и шестому выходам блока управления, а третий и четвертый входы блока управления связаны с датчиками высева, расположенными под высевным отверстием, соответственно, в подающей и периферийной частях кожуха.
| СПИРАЛЬНО-ШНЕКОВЫЙ СМЕСИТЕЛЬ-РАЗБРАСЫВАТЕЛЬ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2003 |
|
RU2244395C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОЦЕССОМ ВЫСЕВА МИНЕРАЛЬНЫХ УДОБРЕНИЙ ШНЕКОВЫМ ВЫСЕВАЮЩИМ АППАРАТОМ | 1998 |
|
RU2137338C1 |
| Шнековый высевающий аппарат | 1987 |
|
SU1501949A1 |
| Шнековый высевающий аппарат | 1987 |
|
SU1423030A1 |
| СПОСОБ УСКОРЕННОГО ВЫДЕЛЕНИЯ УСТОЙЧИВЫХ ВНУТРИПОЛЬНЫХ КОНТУРОВ ПОЧВЕННОГО ПЛОДОРОДИЯ НА СЕЛЬСКОХОЗЯЙСТВЕННЫХ ПОЛЯХ | 2011 |
|
RU2455660C1 |

