Настоящее изобретение относится к приспособлению для автоматической дойки молочного скота, например коровы, в соответствии с вводной частью пункта 1 формулы изобретения.
В ЕР-А1-0360354 описано приспособление для автоматической дойки коровы, оборудованное роботизированной рукой. На конце роботизированной руки оборудован скользящий элемент, способный перемещаться относительно роботизированной руки. На том же конце роботизированной руки оборудованы держатели для четырех доильных стаканов. Каждый из доильных стаканов может быть соединен с вертикально подвижным цилиндром при помощи магнитного соединения. Роботизированная рука является подвижной и может подводиться вместе с доильными стаканами под сосок вымени коровы, которую надлежит доить. Следовательно, можно присоединить каждый из доильных стаканов к соску путем перемещения вышеуказанного доильного стакана вверх при помощи цилиндра.
На скользящем элементе оборудованы сенсорные устройства, определяющие в каждом случае положение следующего соска, к которому следует присоединить доильный стакан. Вышеуказанные сенсорные устройства содержат лазер, зеркало, линзу и приемник. Лазер излучает свет, частично отражаемый соском. При помощи зеркала отраженный свет попадает на линзу, которая проецирует свет на приемник. Датчик может вращаться вокруг вертикальной оси, так что лазер осуществляет сканирующее движение. Сенсорная электроника присоединена к приемнику. Сенсорная электроника способна определить расстояние и угол соска относительно датчика на основании сигнала приемника и на основании мгновенного угла датчика в момент, когда последний получает сигнал. Благодаря сканирующему движению, информация относительно положения соска получается в каждом случае по одной (на практике горизонтальной) линии. Для получения также информации о вертикальном положении роботизированная рука со сканером вместе осуществляют вертикальное движение. На основании полученной таким образом информации о расстоянии роботизированная рука подводится к соску.
Недостаток известного приспособления для дойки заключается в том, что перемещение роботизированной руки с доильными стаканами к соску не всегда осуществляется надежным образом.
Целью настоящего изобретения является устранение вышеуказанных недостатков, по меньшей мере, частично, или, по меньшей мере, обеспечение альтернативы.
Данная задача достигается при помощи изобретения с приспособлением для дойки по пункту 1.
Приспособление для автоматической дойки молочного скота, такого как корова, содержит доильный зал, датчик для наблюдения за, по меньшей мере, частью молочного животного, такой как сосок, а также доильный робот для автоматического присоединения доильного стакана к соску. Доильный робот содержит устройство управления роботом, оперативно соединенное с датчиком. Датчик содержит источник излучения для испускания электромагнитного излучения, в частности света, приемник для приема электромагнитного излучения, отраженного от молочного животного, линзу для проецирования отраженного электромагнитного излучения на приемник и средства управления датчиком. Датчик содержит матрицу с множеством рядов и множеством колонок приемников. Средства управления датчиком оперативно соединены с источником излучения для модулирования электромагнитного излучения. Средства управления датчиком дополнительно служат для определения для каждого из приемников разницы фаз между испускаемым и отражаемым электромагнитным излучением для вычисления расстояний от датчика до множества точек на молочном животном.
При помощи такой матрицы приемников и путем определения для этих приемников, при помощи смещения фаз излучаемого света, расстояний до молочного животного для каждого наблюдения получается полное трехмерное изображение, например, соска. Это трехмерное изображение, фактически, получается сразу, вместо сканирования. Более того, оно не искажается или, по меньшей мере, меньше, чем в предшествующем уровне техники, перемещениями всего молочного животного и/или его соска в ходе наблюдения. Более того, нет необходимости в перемещении роботизированной руки для составления полного изображения. В результате, существует большая вероятность того, что доильный робот будет перемещен в правильном направлении, чем в случае ЕР-А1-0360354.
Предпочтительные воплощения определены в зависимых пунктах.
В одном воплощении, средства управления датчиком дополнительно предназначены для определения разницы фаз между испускаемым и отражаемым электромагнитным излучением для вычисления расстояний от датчика до множества точек на доильном стакане. Путем дополнительного определения расстояний до доильного стакана устройство управления роботом может принимать действительное положение и/или ориентацию доильного стакана в расчет при управлении доильным роботом.
В частности, устройство управления роботом предназначено для вычисления взаимного расстояния между доильным стаканом и соском и для управления доильным роботом на основании вычисленного взаимного расстояния. Путем дополнительного определения взаимного расстояния между доильным стаканом и животным, которое необходимо доить, доильный робот может управляться еще более надежным образом.
Более подробно, устройство управления роботом предназначено для наблюдения за соединением между доильным стаканом и соском. Отдельный датчик для слежения за этим соединением, таким образом, не требуется.
В отдельном воплощении, средства управления датчиком предназначены для периодического определения разницы фаз между испускаемым и отражаемым электромагнитным излучением для вычисления расстояний от датчика до множества точек на соске и на доильном стакане, и устройство управления роботом предназначено для определения с его помощью относительной скорости между рассматриваемыми соединенными доильным стаканом и соском.
В одном воплощении, средства управления датчиком дополнительно предназначены для определения разницы фаз между испускаемым и отражаемым электромагнитным излучением для вычисления расстояний от датчика до множества точек на, по меньшей мере, одной ноге животного, подлежащего дойке, и устройство управления роботом предназначено для управления доильным роботом также на этом основании. Таким образом, средства управления датчиком обеспечивают информацию, необходимую для управления доильным роботом таким образом, чтобы последний не прикасался к ноге молочного животного.
В предпочтительном воплощении, устройство управления роботом может определять, следует ли доить молочное животное, на основании вычисленных расстояний от датчика до множества точек на соске и/или на основании вычисленных расстояний от датчика до множества точек на вымени. На основании полученных и вычисленных расстояний устройство управления роботом способно выполнить трехмерное изображение вымени и/или сосков. Из этого изображения можно понять, набухли ли они до той степени, чтобы можно было заключить, что было произведено достаточно молока, и что молоко опустилось.
В одном воплощении, устройство управления роботом предназначено для идентификации молочного животного на основании вычисленных расстояний от датчика до множества точек на молочном животном. Путем создания трехмерного изображения молочного животного можно опознать молочное животное на основании уникальных индивидуальных пространственных свойств.
В предпочтительном воплощении, устройство управления роботом предназначено для управления чистящими щетками для очистки соска молочного животного на основании вычисленных расстояний от датчика до множества точек на соске молочного животного и/или на основании вычисленных расстояний от датчика до множества точек на чистящих щетках. Путем определения расстояний как до соска, так и до чистящей щетки можно косвенно вычислить давление на сосок и изменить, на этом основании, настройку соответствующей чистящей щетки. Путем лишь наблюдения за чистящей щеткой и периодического повторения этого наблюдения можно рассчитать скорость вращения соответствующей чистящей щетки, из чего можно также получить давление на сосок.
В одном воплощении, устройство управления роботом предназначено для начала процесса очистки доильного зала, если устройство управления роботом установит, что в доильном зале нет молочного скота на основании наблюдений датчика. Таким образом, исключается отдельный датчик для этой задачи.
Предпочтительное воплощение дополнительно содержит чистящее устройство для очистки, по меньшей мере, доильного стакана, при этом средства управления датчиком дополнительно предназначены для определения разницы фаз между испускаемым и отражаемым электромагнитным излучением для вычисления расстояний от датчика до множества точек на чистящем устройстве, и устройство управления роботом предназначено для управления, на этом основании, доильным роботом таким образом, чтобы доильный стакан перемещался к чистящему устройству для очистки. Путем управления доильным роботом на основании измеренного в реальном времени пространственного положения чистящего устройства доильный стакан будет перемещен к последнему надежным образом, также если чистящее устройство было перемещено относительно первоначального положения, например, из-за того, что по нему ударила корова.
Для лучшего понимания предпочтительных воплощений, описанных здесь далее, первый возможный датчик приспособления для дойки в соответствии с изобретением будет описан здесь более подробно. Источник излучения испускает электромагнитное излучение. Предпочтительно с этой целью используется свет, более предпочтительно - инфракрасное излучение, еще более предпочтительно - ближнее инфракрасное излучение. С этой целью, в частности, могут быть использованы светодиоды, которыми можно управлять очень простым способом при помощи электрически регулируемого тока питания и которые, более того, являются очень компактными и эффективными и обладают длительным сроком службы. Тем не менее, также могут быть использованы другие источники излучения. Ближнее инфракрасное излучение обладает преимуществом, заключающимся в том, что оно не раздражает молочный скот.
Излучение модулируется, например модулируется его амплитуда, в соответствии с частотой модуляции, которая, естественно, отличается и является намного меньшей, чем частота самого электромагнитного излучения. Инфракрасный свет, например, является здесь носителем для модулированного сигнала.
С помощью испускаемого излучения расстояние определяется путем измерения смещения фаз модулированного сигнала путем сравнения фазы отраженного излучения с фазой исходного излучения. Для последнего испускаемое излучение предпочтительно передается (практически) немедленно к приемнику. Расстояние может быть определено простым способом из измеренной разницы фаз как
расстояние = ½ длины волны × (разница фаз/2π),
где длина волны составляет длину волны для модулированного сигнала. Следует отметить, что в вышеуказанном уравнении однозначность определения расстояния не принимается в расчет, при этом однозначность возникает в том, что разница фаз из-за периодичности может принадлежать расстоянию A, но также A + n × (длина волны/2). По этой причине может быть полезно выбрать длину волны амплитудной модуляции так, чтобы расстояния, возникающие на практике, были фактически однозначно определены.
Предпочтительно, длина волны модуляции, например амплитудной модуляции, испускаемого излучения составляет от 1 мм до 5 метров. При такой длине волны можно определить однозначно расстояния максимальной протяженностью от 0,5 мм до 2,5 метров. С этим связана частота модуляции от 300 МГц до 60 КГц, которую можно получить простым образом в электрических цепях для привода светодиодов. Следует отметить, что, при желании, также можно выбрать еще меньшую или большую длину волны.
В предпочтительном воплощении, длина волны является регулируемой, в частности ее можно переключить между, по меньшей мере, двумя значениями. Это обеспечивает возможность осуществления, например, первого грубого измерения расстояния с помощью длины волны большой модуляции. Несмотря на то, что такая длина волны обеспечивает надежное измерение на большие расстояния, тем не менее, присущее ей разрешение меньше. Здесь в целях упрощения принимается, что разрешение определяется точностью измерения фазы, которая может быть измерена, например, с точностью в y%. Путем первого измерения с большой длиной волны можно измерить грубое расстояние. Затем можно осуществить, с меньшей длиной волны, более точное измерение, при этом однозначность обеспечивается грубым измерением.
Например, первое измерение осуществляется при длине волны 2 м. Точность определения фаз составляет 5%. Измеренная разница фаз составляет (0,8 × 2π)±5%. В таком случае измеренное расстояние составляет 0,80±0,04 метра. Затем измерение осуществляется при длине волны 0,5 метра. Измеренная разница фаз составляет 0,12 × 2π модуль 2π. Это означает, что расстояние составляет 0,12 × 0,25 модуль 2π, то есть 0,03 модуль 0,25 метра. Поскольку расстояние должно более того составлять 0,80±0,04, расстояние должно быть равно 0,78 метра, но теперь с точностью до 0,01 метра. Таким образом, точность может быть поэтапно увеличена, и разные длины волн модуляции могут быть выбраны на основании точности предыдущего шага.
Также предпочтительно, например, сначала определить грубо положение/расстояние при помощи большой длины волны, и затем определить скорость из изменения положения, которое может, тем не менее, быть определено однозначно из изменения разницы фаз, измеренного при помощи меньшей длины волны.
Вместо регулирования длины волны модуляции, длина волны самого электромагнитного излучения может быть отрегулирована и, предпочтительно, может переключаться между двумя значениями. Это предоставляет, например, возможность использования множества датчиков, управления каждым из них с множеством различных длин волн, одновременно в одном пространстве.
В предпочтительном воплощении, источник излучения испускает излучение пульсирующим образом, предпочтительно с частотой пульсации от 1 Гц до 100 Гц. Здесь, длина пульсации составляет предпочтительно не больше ½, наиболее предпочтительно 1/n части периода пульсации. Это обеспечивает неизлучающие паузы между пульсациями, которые могут быть использованы для других целей, например для передачи данных. С этой целью может быть использован тот же источник излучения, но теперь с другим протоколом связи; однако при этом датчик не предлагает и не нарушает измерений. Более того, можно использовать другой источник излучения и/или датчик во время паузы, в случае чего также не происходит взаимных помех.
Предпочтительно, источник излучения обладает регулируемой интенсивностью света и/или регулируемым углом излучения. Это обеспечивает возможность адаптации интенсивности испускаемого излучения или количества энергии испускаемого излучения к условиям освещенности, что может привести к сбережению энергии. В случае короткого расстояния и сильной отражающей способности, например, требуется меньше излучения, чем в случае большого расстояния и относительно высокой поглощающей способности, например темной шкуры животного и тому подобное. Также можно адаптировать угол излучения к углу обзора датчика, поскольку угол обзора излучения не должен превышать угол обзора. Может быть предпочтительно, например, при наблюдении за пространством, выбрать большой угол излучения, например от 80° до 180°, поскольку угол обзора, используемый в этом случае, будет зачастую таким же большим. С другой стороны, при «навигации» робота к соску, может быть выбран меньший угол излучения, например от 30° до 60°. Конечно, также допустимы множество других углов излучения.
В отдельном воплощении, угол обзора наблюдаемой области датчика является регулируемым. Угол обзора может, таким образом, быть выбран в соответствии с наблюдаемым объектом или областью. Предпочтительно, например, при направлении к соску выбирать угол обзора малого значения с соответствующим большим разрешением. Также может быть предпочтительно исключить объекты, создающие помехи излучению, например горячие объекты, из наблюдаемой области путем выбора предпочтительного угла обзора. С этой целью можно, например, расположить объектив (линзу) с изменяемым фокальным расстоянием (вариообъектив) впереди датчика. Также можно выбрать лишь ограниченную область для приемников датчика. Это сравнимо с функцией цифрового увеличения.
В отдельном воплощении, матрица с множеством рядов и множеством колонок приемников и предпочтительно также источник излучения расположены с возможностью поворота. Это обеспечивает преимущество, заключающееся в том, что для наблюдения за различными частями молочного животного необходимо повернуть лишь приемное устройство и, возможно, также источник излучения. Это особо предпочтительно, если угол обзора и, возможно, также угол излучения относительно малы для обеспечения, таким образом, относительно высокого разрешения. Тем не менее, также можно, конечно, соединить приемное устройство и источник излучения жестко с доильным роботом или компонентом доильного зала для максимальной простоты конструкции.
Настоящее изобретение будет теперь описано более подробно со ссылкой на иллюстративные воплощения, изображенные на прилагаемых чертежах, на которых:
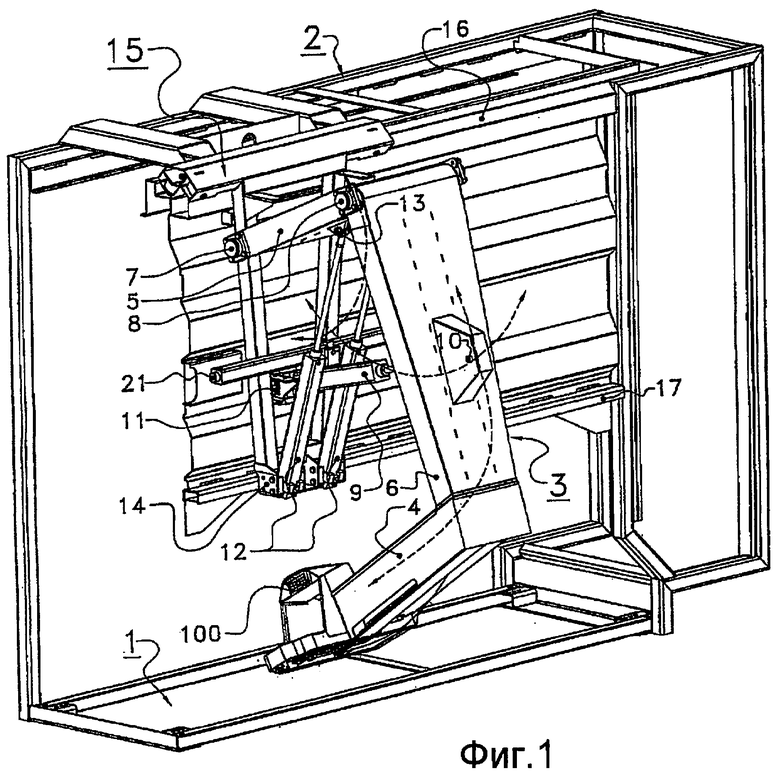
Фиг.1 изображает схематичный вид в перспективе приспособления с конструкцией роботизированной руки и датчиком в соответствии с изобретением;
Фиг.2 изображает вид спереди приспособления, изображенного на Фиг.1;
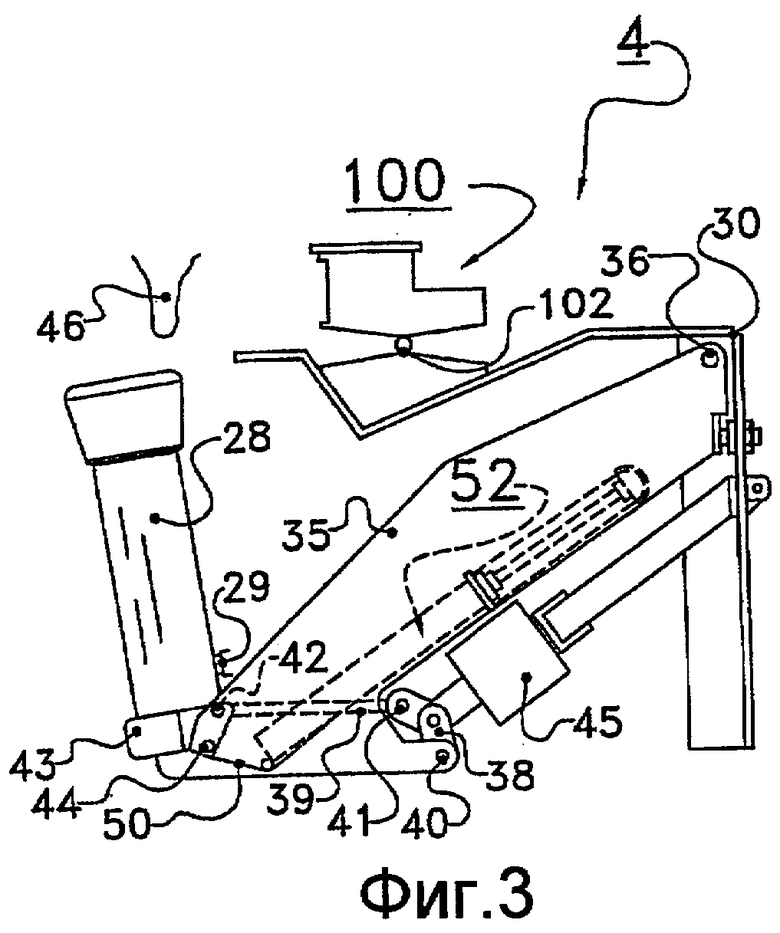
Фиг.3 изображает вид сбоку конца конструкции роботизированной руки с датчиком, закрепленным альтернативным образом;
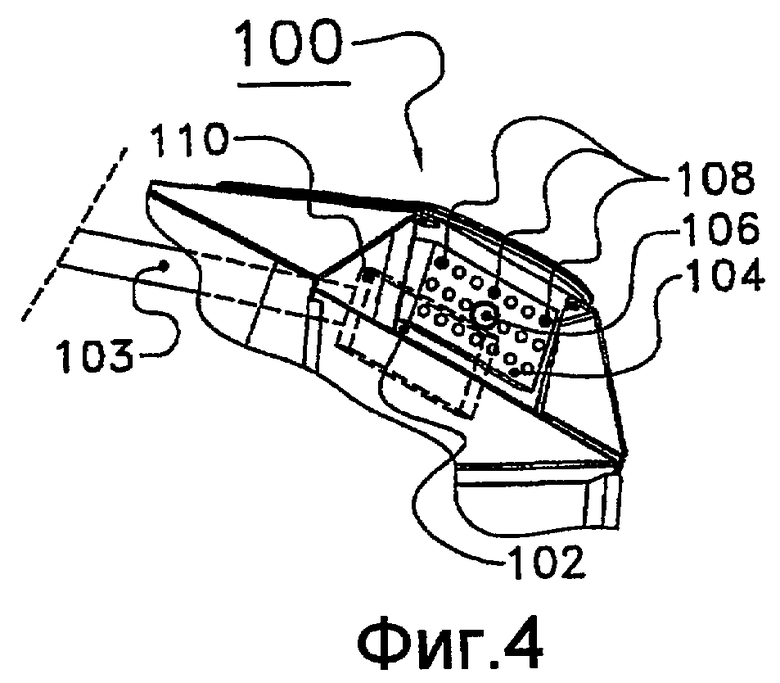
Фиг.4 изображает трехмерный вид датчика, и
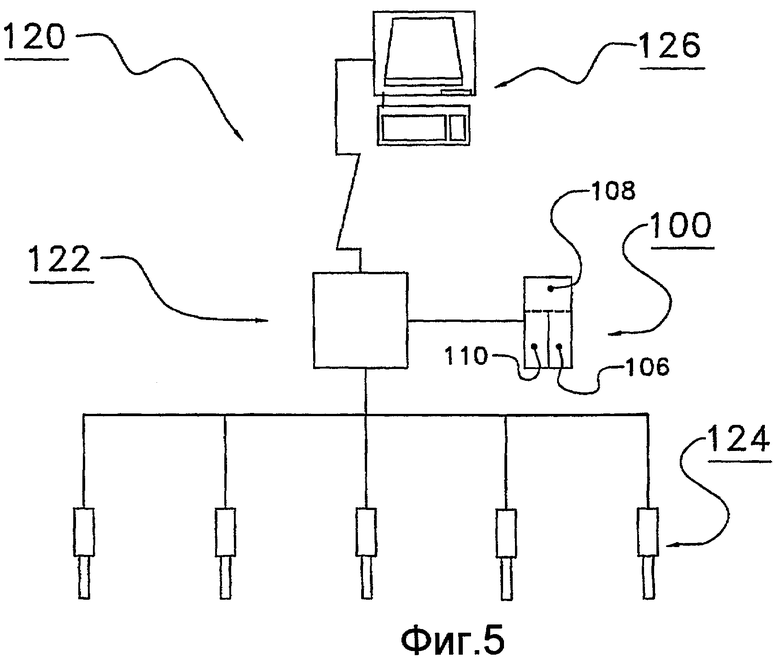
Фиг.5 изображает схематичный вид системы управления приспособлением в соответствии с изобретением.
Приспособление для автоматической дойки животного, такого как корова, показанное на схематичном виде в перспективе с Фиг.1, содержит доильный зал 1, в который помещается одно единственное животное, например корова. Этот доильный зал 1 окружен традиционным образом забором 2 и оборудован входной дверью и выходной дверью, которые, в данном случае, не показаны на чертежах. В доильном зале 1 и в непосредственной близости от него расположен доильный робот, содержащий конструкцию 3 роботизированной руки для автоматического соединения доильного стакана с соском животного, которое следует подоить. Конструкция роботизированной руки оборудована роботизированной рукой 4 для поддержания доильного стакана, при этом роботизированная рука 4 способна поворачиваться к вымени животного (см. Фиг.3).
Конструкция 3 роботизированной руки оборудована первым участком 5 конструкции роботизированной руки и вторым участком 6 конструкции роботизированной руки. Первый участок 5 конструкции роботизированной руки шарнирно соединен с верхней частью забора 2 при помощи первой горизонтальной оси 7. Второй участок 6 конструкции роботизированной руки шарнирно соединен с первым участком 5 конструкции роботизированной руки посредством второй горизонтальной оси 8, расположенной снаружи доильного зала 1. Роботизированная рука 4 соединена со вторым участком 6 конструкции роботизированной руки. Роботизированная рука 4 может быть жестко соединена со вторым участком 6 конструкции роботизированной руки или может быть соединена с ним при помощи третьей горизонтальной и/или вертикальной оси, так что роботизированная рука способна поворачиваться относительно второго участка конструкции роботизированной руки, например, при помощи цилиндра управления.
Первый цилиндр управления 9 имеет первую точку приложения 10 на втором участке 6 конструкции роботизированной руки и вторую точку приложения 11 на заборе 2 в месте на первом расстоянии ниже первой горизонтальной оси 7. Второй цилиндр управления 12 имеет первую точку приложения 13 на первом участке 5 конструкции роботизированной руки и вторую точку приложения 14 на заборе 2 в месте на втором расстоянии ниже первой горизонтальной оси 7, при этом второе расстояние больше первого расстояния. Второй цилиндр управления 12 может представлять собой один цилиндр управления или может быть образован двумя цилиндрами управления, которые помещены с обеих сторон от первого цилиндра управления 9, как хорошо видно на Фиг.1. Здесь, первая точка приложения 10 расположена на втором участке 6 конструкции роботизированной руки, по меньшей мере, примерно на середине второго участка 6 конструкции роботизированной руки. Для получения по существу горизонтального движения свободного конца роботизированной руки 4 первая точка приложения 10 на втором участке 6 конструкции роботизированной руки расположена на той стороне второго участка 6 конструкции роботизированной руки, которая противоположна забору 2. Первая точка приложения 13 на первом участке 5 конструкции роботизированной руки расположена ближе ко второй горизонтальной оси 8, чем к первой горизонтальной оси 7. Для получения относительно компактной конструкции первая точка приложения 10 на первом участке 5 конструкции роботизированной руки сориентирована в направлении роботизированной руки 4.
Конструкция 3 роботизированной руки может быть перемещена в продольном направлении доильного зала 1 посредством опорного блока 15, который имеет возможность перемещения вдоль рельсов 16 и 17. Рельс 16 расположен на верхней стороне забора 2 и рельс 17 расположен, в обоих воплощениях, примерно на середине высоты доильного зала 1 по продольной стороне забора 2, а именно на той стороне, где расположена конструкция 3 роботизированной руки. Как на верхней, так и на нижней стороне опорный блок 15 оборудован роликами 18, 19 и 20. Опорный блок 15 может перемещаться вдоль рельсов 16, 17 при помощи цилиндра управления (не показано), чья точка приложения на опорном блоке 15 обозначена ссылочной позицией 21. Первая горизонтальная ось 7 и вторая горизонтальная ось 8 расположены на опорном блоке 15, и вторая точка приложения 11 первого цилиндра управления 9 и вторая точка приложения 14 второго цилиндра управления 12 воздействуют на опорный блок 15.
На Фиг.3 подробно показан свободный конец роботизированной руки, например роботизированной руки 4. На свободном конце роботизированной руки 4 оборудованы четыре доильных стакана 28, один из которых показан на данном виде. Каждый из доильных стаканов 28 соединен со шлангом 29 для выпуска молока из доильного стакана 28 и с не показанным шлангом для применения пульсации вакуума.
Свободный конец роботизированной руки 4 содержит опорный элемент 30. Для каждого доильного стакана 28 оборудован корпус 35, который соединен с опорным элементом 30 при помощи шарнирного пальца 36. Каждый корпус 35 оборудован соединительным механизмом 37, содержащим изогнутый рычаг 38 и рычаг управления 39. На одном конце изогнутый рычаг 38 соединен с корпусом 35 при помощи шарнирного пальца 40. На другом конце изогнутый рычаг 38 соединен с рычагом управления 39 при помощи шарнирного пальца 41. На своей другой стороне рычаг управления 39 соединен с держателем 43 для доильного стакана 28 при помощи шарнирного пальца 42. Держатель 43 дополнительно соединен с корпусом 35 при помощи шарнирного пальца 44. В корпусе 35 дополнительно оборудован цилиндр управления 45, который соединен с опорным элементом 30 и с другой стороны с изогнутым рычагом 38.
В ситуации с Фиг.3 цилиндр управления 45 отведен, в результате чего корпус 35 занимает нижнее положение, и держатель 43 с доильным стаканом 28 наклонен. Путем удлинения цилиндра управления 45, держатель 43 и доильный стакан 28 наклоняются к вертикальной ориентации (не показано). Дальнейшая работа цилиндра управления 45 приводит к тому, что корпус 35 перемещается вверх для соединения доильного стакана 28 с соском 46.
После соединения доильного стакана 28 с соском 46 корпус 35 перемещается вниз. Доильный стакан 28 остается соединенным с корпусом 35 при помощи троса 50. Трос 50 простирается от нижней стороны доильного стакана 28, через держатель 43 и под роликом 51 к цилиндру управления 52. В ходе перемещения вниз корпуса 35 цилиндр управления 52 отводится для ослабления троса 50. Путем повторного удлинения цилиндра управления 52 трос 50 тянет доильный стакан 28 обратно к держателю 43. Для более подробного описания конструкции 3 роботизированной руки ссылка сделана на ЕР-А1-1442657. Более подробное описание работы доильных стаканов 28 приведено в ЕР-А1-862360.
На конструкции 3 роботизированной руки оборудован датчик, в данном случае трехмерная камера 100. Трехмерная камера 100 содержит корпус 101 из синтетического материала, который, в воплощении с Фиг.3, с возможностью перемещения соединен с опорным элементом 30 при помощи шарового шарнира 102. Трехмерная камера 100 может вращаться вокруг вертикальной оси посредством шарового шарнира 102 и наклоняться вокруг горизонтальной оси посредством шарового шарнира 102 при помощи не показанных элементов привода, например сервомоторов.
Альтернативно, трехмерная камера 100 может быть жестко соединена с роботизированной рукой 4 (воплощения с Фиг.1 и 2) или может быть отдельно соединена, с возможностью перемещения, посредством руки 103, с другой частью доильного приспособления, например с забором 2 (что частично показано в воплощении с Фиг.4).
Корпус 101 содержит переднюю сторону 104. На передней стороне 104 содержатся линза 106 и множество источников излучения, в данном воплощении источники света 108, в форме инфракрасных светодиодов. В качестве варианта, линза 106 оборудована на внутренней стороне передней стороны 104, при этом передняя сторона 104 изготовлена из материала, способного пропускать инфракрасный свет. Линза 106, таким образом, защищена от внешних воздействий, в то время как плоская передняя сторона 104 из синтетического материала может быть очищена более простым образом, чем передняя сторона 104 с выступающей линзой 106.
В корпусе 101 дополнительно оборудован датчик положения, такой как http://www.multitran.ru/c/m.exe?a=110&t=2128930_2_1&sc=138 датчик изображения КМОП (комплементарный металло-оксидный полупроводник). Датчик изображения КМОП 110 содержит на стороне, обращенной к линзе 106, матрицу с множеством рядов и колонок приемников в форме светочувствительных фотодиодов. В настоящем воплощении, она представляет собой матрицу 64×64 фотодиода, но также допустимы размеры матриц с разрешениями 176×144, 640×480 и прочими, большими или меньшими. Датчик изображения КМОП 110 содержит встроенные средства управления датчиком (не показано), которые управляют инфракрасным светодиодом 108 и преобразуют инфракрасный свет, падающий на каждый из фотодиодов, в цифровой сигнал, и передают его через не показанное беспроводное соединение или проводное соединение к центральному процессору или компьютеру (см. также далее).
Средства управления датчиком трехмерной камеры 100 определяют расстояние от объекта до каждого из фотодиодов путем измерения разницы фаз между светом, излучаемым инфракрасным светодиодом 108 трехмерной камеры 100 на объект, светом, возвращенным после отражения к трехмерной камере 100, т.е. к ее датчику изображения КМОП 110.
В предпочтительном воплощении, инфракрасный светодиод 108 издает амплитудно-модулированный световой сигнал в волновой форме. Амплитудная модуляция сама имеет частоту повторяемости. После отражения этот световой сигнал отображается при помощи линзы 106 на датчике изображения КМОП 110. Путем определения разницы фаз полученного модулированного светового сигнала относительно излучаемого модулированного светового сигнала можно вычислить, при помощи длины волны модулированного сигнала, расстояние между датчиком и объектом. Это происходит параллельно для всех фотодиодов датчика изображения КМОП 110. Таким образом, создается трехмерное изображение наблюдаемого объекта.
Следует отметить, что, таким образом, расстояние еще не определяется однозначно, поскольку положение объекта может быть определено при множестве длин волн используемого светового сигнала датчика. На практике это можно решить, например, путем также изменения частоты амплитудной модуляции.
В отдельном воплощении, короткие световые импульсы могут излучаться инфракрасным светодиодом 108, при условии, что, по меньшей мере, одна волна, а предпочтительно две или множество волн модулированного сигнала падают при каждом световом импульсе.
На Фиг.5 схематично показано устройство управления роботом или средства управления роботом здесь в форме системы управления 120 доильным роботом, например конструкцией 3 роботизированной руки. Система управления 120 содержит центральный процессор 122 для управления одним или несколькими элементами привода 124 и станцию пользователя в форме персонального компьютера (ПК) 126. Элементы привода 124 могут представлять собой цилиндры управления 9, 12, 45 и 52 для конструкции 3 роботизированной руки и описаны относительно Фиг.1-3 и, возможно, не показанные сервомоторы для фокусировки самой трехмерной камеры 100.
Центральный процессор 122 имеет оперативную память и обеспечен контрольным программным обеспечением и обрабатывает, на основании алгоритмов или контроллера нечеткой логики, трехмерные изображения с трехмерной камеры 100. На основании обработки, центральный процессор 122 управляет одним или несколькими элементами привода 124, как будет описано далее более подробно.
Центральный процессор 122 соединен с персональным компьютером 126 через неподвижное или беспроводное соединение. При помощи ПК 126 можно загружать и/или обновлять контрольное программное обеспечение центрального процессора 122. Более того, на мониторе ПК 126 может отображаться так или иначе обработанное изображение с трехмерной камеры 100. Дополнительно на этом экране могут быть отображены предупреждения, если они необходимы, если центральный процессор 122 обнаруживает, на основании изображения с трехмерной камеры 100, что имели место нарушения или прочие нежелательные события. В конечном счете, ПК 126 может быть оборудован или может быть соединен с носителем информации (не показан), где могут храниться изображения с датчика и/или обработанная информация.
В ходе работы, конструкция 3 роботизированной руки будет расположена на стороне доильного зала 1. Трехмерная камера 100, затем, фокусируется на входной двери (не показано). Как только корова появляется во входной двери, трехмерная камера 100 ее замечает. Система управления 120 создает трехмерное изображение части коровы. С этой целью, средства управления датчиком датчика изображения КМОП 110 определяют разницу фаз между светом, излучаемым инфракрасным светодиодом 108, и светом, отраженным от множества точек коровы на трехмерную камеру 100. В этом случае, свет, отраженный от множества точек коровы, падает на различные приемники матрицы с приемниками датчика изображения КМОП 110.
Эта разница фаз преобразуется для каждого приемника матрицы при помощи датчика изображений КМОП 110 или центрального процессора 122 в расстояние от трехмерной камеры 100 до множества точек на корове.
В зависимости от выбранной частоты амплитудной модуляции, трехмерная камера 100 может получать множество изображений, например пятьдесят, в секунду. Каждое изображение должно быть в этом случае рассмотрено как надежное представление соска или другой части коровы, при этом любое движение коровы приводит к намного меньшему искажению изображения, чем в случае сканирующего датчика в соответствии с предшествующим уровнем техники. Более того, нет необходимости в перемещении самой трехмерной камеры 100 для того, чтобы сделать полный снимок. В результате, конструкция 3 роботизированной руки может быть перемещена к соску 46 надежным образом, как будет описано далее более подробно.
В памяти центрального процессора 122 содержится база данных о пространственных характеристиках множества, а предпочтительно всех, коров из стада, которое следует подоить. На основании наблюдаемого трехмерного изображения рассматриваемая корова идентифицируется и можно определить, следует ли допускать ее в доильный зал 1.
После того, как корова вошла в доильный зал 1 или все еще находится у входной двери делается дополнительное трехмерное изображение вымени и сосков коровы. На основании размера вымени и/или на основании предшествующих данных о рассматриваемой корове определяется, следует ли доить эту корову. Если нет, выходная дверь открывается для того, чтобы корова покинула доильный зал 1, если она уже была впущена. Если корову еще не впустили, входная дверь в доильный зал 1 не открывается для этой коровы.
В то время, когда корова входит в доильный зал 1, трехмерная камера 100 продолжает делать снимки коровы. На основании этих снимков центральный процессор 122 определяет, вошла ли корова полностью в доильный зал 1. В этот момент один из элементов привода 124 срабатывает для закрытия входной двери. Дополнительно подается некоторое количество корма, предназначенное для наблюдаемой коровы, в кормушку (не показано), расположенную в конце доильного зала 1.
После того, как корова вошла в доильный зал 1, трехмерная камера 100 делает, по меньшей мере, один снимок коровы полностью или, по меньшей мере, вымени, а предпочтительно также задних конечностей коровы. На этом основании центральный процессор 122 может определить пространственное положение вымени и, возможно, задних конечностей. Следует отметить, что в предшествующем уровне техники положение задних ног коровы определялось не напрямую путем определения задней стороны коровы посредством датчика-щупа или путем определения центра тяжести коровы при помощи взвешивающих средств на полу доильного зала 1. Трехмерная камера 100, таким образом, способна заменить такой датчик-щуп и/или взвешивающие средства.
На основании полученных изображений с трехмерной камеры 100 и, в частности, пространственного положения вымени и, возможно, задних конечностей центральный процессор 122 перемещает чистящие валики, известные сами по себе и не показанные здесь, к соскам 46, подлежащим дойке. Трехмерная камера 100, затем, продолжает следовать за соответствующими чистящими валиками, и центральный процессор 122, благодаря относительно высокой частоте изображения трехмерной камеры 100, будет способен вычислить скорость вращения соответствующих чистящих роликов. Если эта скорость вращения становится слишком низкой, это означает, что давление на рассматриваемый сосок 46 слишком большое, и элемент привода регулируется так, чтобы снизить соответствующее давление. Трехмерная камера 100, таким образом, устраняет необходимость в отдельном датчике для наблюдения за скоростью вращения чистящих валиков.
После первой чистки вымени с сосками 46 центральный процессор 122 определяет, было ли вымя достаточно стимулировано для начала дойки. С этой целью, при помощи трехмерной камеры 100 вновь выполняется трехмерное изображение вымени и сосков 46. Это трехмерное изображение сравнивается с одним или множеством исходных изображений. Это могут быть изображения рассматриваемой коровы, хранимые в памяти центрального процессора 122 и/или ПК 126, и/или изображения вымени с сосками 46, которые были сделаны до чистки. Если форма и/или размер рассматриваемого вымени и/или сосков 46 изменились, по меньшей мере, на заданную величину, то центральный процессор 122 заключает, что вымя было достаточно стимулировано.
На основании пространственных положений сосков 46 и, возможно, на основании (предпочтительно полученного вновь) трехмерного изображения положений ног центральный процессор 122 затем определяет маршрут, по которому пойдет роботизированная рука 4. Центральный процессор 122 перемещает роботизированную руку 4 и, в частности, доильные стаканы 28, расположенные на ней, к рассматриваемым соскам 46.
В зависимости от воплощения соответствующей конструкции 3 роботизированной руки, доильные стаканы 28 перемещаются последовательно или одновременно к рассматриваемым соскам 46 и соединяются с ними. Предпочтительно, центральный процессор 122 основывает желаемое перемещение роботизированной руки 4 на одновременном наблюдении как за соском 46, так и за доильным стаканом 28, который следует присоединить. Центральный процессор может вычислить на этом основании взаимное расстояние, направление и скорость, что дополнительно повышает точность навигации. Это также обеспечивает преимущество в том, что изменения положения доильного стакана 28 обрабатываются автоматически. Такие изменения возникают, например, если доильный стакан 28 не всегда помещается одинаковым образом в свой держатель 43.
После присоединения доильных стаканов 28 к соскам 46 трехмерная камера 100 продолжает наблюдение за доильными стаканами 28, сосками и, возможно, большей частью коровы. Центральный процессор 122 может заключить, на основании любого взаимного перемещения между рассматриваемыми доильным стаканом 28 и соском 46, что соединение между доильным стаканом 28 и соском 46 уменьшается, и что дойка посредством соответствующего доильного стакана 28 должна (практически) завершаться. При внезапном большом взаимном перемещении доильного стакана 28 относительно рассматриваемого соска 46 центральный процессор 122 может заключить, что соответствующий доильный стакан 28 отсоединился от рассматриваемого соска 46, например, потому что корова ударила по нему. В таком случае, центральный процессор 122 может немедленно принять меры, например, путем натяжения троса 50, для обеспечения того, что соответствующий доильный стакан не упадет на пол доильного зала 1, где он может испачкаться. Также центральный процессор 122 может принять предохранительные меры, например отделение возможно загрязненного молока и/или очистку соответствующего доильного стакана 28 и связанного с ним шланга 29 для молока.
Путем обеспечения трехмерной камере 100 возможности наблюдать за большей частью коровы, чем только вымя с сосками 46, можно, например, также наблюдать за ногами рассматриваемой коровы. На основании наблюдения за ногами и/или другими частями коровы центральный процессор 122 может определить риск того, что нога собьет доильный стакан или что рассматриваемая нога ударит по конструкции 3 роботизированной руки. Также центральный процессор 122 может определить, на основании трехмерного изображения задней части коровы, риск того, что корова собирается облегчиться. Если центральный процессор 122 определяет, что риск сбивания и/или облегчения коровы превышает определенное значение, он может принять решение предпринять предохранительные меры, такие как перемещение конструкции 3 роботизированной руки или предохранительное натягивание троса 50.
В определенный момент, центральный процессор 122 установит, что рассматриваемая корова была достаточно подоена, благодаря изображению с трехмерной камеры 100, свидетельствующему о том, что размер вымени уменьшился до определенной степени и/или поскольку соответствующие доильные стаканы 28 и соски 46 начали перемещаться друг относительно друга, как описано выше. В этот момент центральный процессор 122 отдаст приказ отсоединить доильные стаканы 28 для их перемещения по тросам 50 к соответствующим держателям 43 и переместить роботизированную руку 4 из-под коровы. После этого открывается выходная дверь. На основании изображений с трехмерной камеры 100 центральный процессор 122 способен установить, когда корова полностью покинула доильный зал 1, после чего соответствующий элемент привода сможет закрыть выходную дверь.
После дойки или, по крайней мере, до дойки следующей коровы доильные стаканы 28 и связанные с ними шланги 29 для молока могут быть очищены. С этой целью, обеспечивается чистящий блок, известный сам по себе и не показанный здесь. Он содержит чистящую разбрызгивающую форсунку, которая впрыскивает чистящую жидкость, например воду, в один из доильных стаканов 28. Чистящая жидкость отсасывается через соответствующий шланг 29 для молока и, таким образом, очищает также соответствующий шланг. Чистящий блок выполнен в доильном зале 1 или около него так, чтобы конструкция 3 роботизированной руки могла перемещать держатели 43 с доильными стаканами 28 для чистящего блока. С этой целью, трехмерная камера 100 выполняет одно или несколько трехмерных изображений доильных стаканов 28 и чистящего блока. Центральный процессор 122 может управлять элементами привода 124 конструкции 3 роботизированной руки на основании действительных положений доильных стаканов 28 и чистящего блока. Это является предпочтительным для управления на основании определенных и вычисленных положений, поскольку действительные положения могут отклоняться от них, например, из-за внешних нагрузок на конструкцию 3 роботизированной руки и/или чистящий блок, например, когда корова толкает или ударяет их.
При желании, центральный процессор 122 может наблюдать при помощи изображений с трехмерной камеры 100, загрязнен ли доильный зал 1 в большей или меньшей степени, и решить, на этом основании, очистить доильный зал 1 и/или окружающий забор 2 и/или конструкцию 3 роботизированной руки. В таком случае центральный процессор 122 может вновь проверить, на основании изображения с трехмерной камеры 100, полностью ли доильный зал свободен от животных, людей или предметов, препятствующих чистке. В течение чистки центральный процессор 122 может проверять и, при желании, регулировать ход чистки. Для более подробного описания чистящего устройства, которое может быть использовано, см. US A1 2004/0103646. Следует отметить, что особо предпочтительно то, что трехмерная камера 100 способна заменить один или несколько специальных датчиков и камер из соответствующей публикации. Это означает снижение затрат как для соответствующих датчиков, так и для камер и систем управления, связанных с ними.
В пределах изобретения допустимы различные варианты. Например, также возможно использовать для датчика, вместо инфракрасного света, свет с другими длинами волн, среди которых видимый свет. Вместо модуляции амплитуды также может быть использована модуляция частоты. Также можно обеспечить источники света в другом положении, нежели чем на корпусе линзы и датчика изображения, например посредством отдельного корпуса на роботизированной руке. В таком случае особенно важно, конечно, то, что расстояние между источниками света и датчиком изображения известно, так что вычисленное расстояние от наблюдаемого соска может быть соответствующим образом скорректировано.
Датчик может быть соединен с возможностью перемещения, а не жестко, с роботизированной рукой или может быть соединен, отдельно от роботизированной руки, жестко или подвижно в положении около доильного зала, например, с забором.
Система управления не обязательно должна быть установлена около центрального процессора. Также могут быть оборудованы децентрализованные процессоры, объединенные или нет с существующими компонентами, такими как датчик изображения КМОП. Также путем выполнения элементов привода с децентрализованными процессорами может быть получено сетевое управление, при котором различные децентрализованные процессоры напрямую соединяются друг с другом.
Предпочтительно, чтобы большое количество задач для приспособления для автоматической дойки коровы выполнялось на основании трехмерных изображений с одной трехмерной камеры, как описано выше. Таким образом, снижается стоимость производства и ремонта различных отдельных датчиков. Однако изобретение уже обладает преимуществами, даже если одна задача или комбинация меньшего количества задач выполняются на основании изображений с трехмерной камеры. В таких случаях трехмерная камера не должна обязательно наблюдать именно за соском, но также за другими частями коровы или даже за всей коровой. Трехмерная камера может быть предпочтительно использована, например, для распознавания коровы, которая появилась для того, чтобы ее подоили. Также предпочтительно регулировать лишь очистку доильного зала на основании изображений с трехмерной камеры.
В качестве варианта, можно использовать множество трехмерных камер, в этом случае одна из них, например, предназначена для наблюдения по существу за всей коровой в течение существенного отрезка времени, при этом вторая трехмерная камера предназначена для выполнения подробных снимков, например сосков. В данном варианте, важно синхронизировать соответствующие источники света или подстроить их друг под друга другим способом. Например, можно использовать свет с взаимно отклоняющимися частотами. Также можно излучать световые импульсы альтернативным способом. Это может координироваться центральным процессором. Однако также предпочтительно вынуждать датчик наблюдать за тем, что световой импульс принимается от другого датчика, и вынуждать сам этот датчик излучать световой импульс через определенный короткий промежуток времени после этого.
Более того, приспособление для автоматической дойки в соответствии с изобретением может также быть использовано преимущественно для другого молочного скота, например для коз. Также могут быть использованы другие типы приспособлений для дойки, например приспособления с абсолютно другим типом доильного робота, приспособления, в которых роботизированная рука перемещается к корове и от нее с помощью осей вращения, сориентированных по-другому, или приспособления, в которых корова имеет большую степень свободы перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Биотехническая система поиска сосков на вымени дойного животного для робота-дояра | 2017 |
|
RU2661386C1 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2587561C2 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2587563C9 |
| ДОИЛЬНЫЙ ЗАЛ И СПОСОБ ЕГО РАБОТЫ | 2010 |
|
RU2524083C2 |
| ДОИЛЬНЫЙ ЗАЛ | 2014 |
|
RU2656547C2 |
| Способ и устройство для бесконтактной диагностики заболевания конечностей крупного рогатого скота на ранней стадии | 2021 |
|
RU2774146C1 |
| Способ детектирования доильного робота | 2022 |
|
RU2795709C1 |
| ДОИЛЬНАЯ УСТАНОВКА С ВНУТРЕННИМ РОБОТИЗИРОВАННЫМ УСТРОЙСТВОМ | 2013 |
|
RU2578613C1 |
| АППАРАТ ДЛЯ ДОЕНИЯ И СБОРА МОЛОКА С СИСТЕМОЙ ЗАЩИТЫ МОЛОКОПРОВОДА | 2011 |
|
RU2583697C2 |
| АППАРАТ ДЛЯ ДОЕНИЯ И СБОРА МОЛОКА С СИСТЕМОЙ ЗАЩИТЫ МОЛОКОПРОВОДА | 2011 |
|
RU2676917C2 |
Изобретение относится к сельскому хозяйству. Предложенное приспособление для автоматической дойки молочного скота, такого как корова, содержит доильный зал (1), датчик (100) для наблюдения за соском (46) и доильный робот (3) для автоматического присоединения доильного стакана к соску. Доильный робот (3) содержит устройство управления роботом, соединенное с датчиком. Датчик содержит источник излучения для излучения света, приемник для получения электромагнитного излучения, отраженного от молочного животного, линзу и средства управления датчиком. Датчик (100) содержит матрицу с множеством рядов и множеством колонок приемников. Средства управления датчиком оперативно соединены с источником излучения для модулирования электромагнитного излучения и предназначены для определения для каждого из приемников разницы фаз между испускаемым и отражаемым электромагнитным излучением для вычисления расстояния от датчика (100) до множества точек на части молочного животного, подлежащей наблюдению. При этом устройство управления роботом выполнено с возможностью вычисления взаимного расстояния между доильным стаканом и соском и управления доильным роботом на основании вычисленного взаимного расстояния и предназначено для определения с помощью этого взаимной скорости между рассматриваемыми соединенными доильным стаканом и соском. Средства управления датчиком предназначены для циклического определения разницы фаз между испускаемым и отражаемым электромагнитным излучением для вычисления расстояний от датчика (100) до множества точек на соске и на доильном стакане. Изобретение обеспечивает более быстрое и точное определение местоположения объекта в пространстве, которое не искажается перемещением объекта в пространстве. 14 з.п. ф-лы, 5 ил.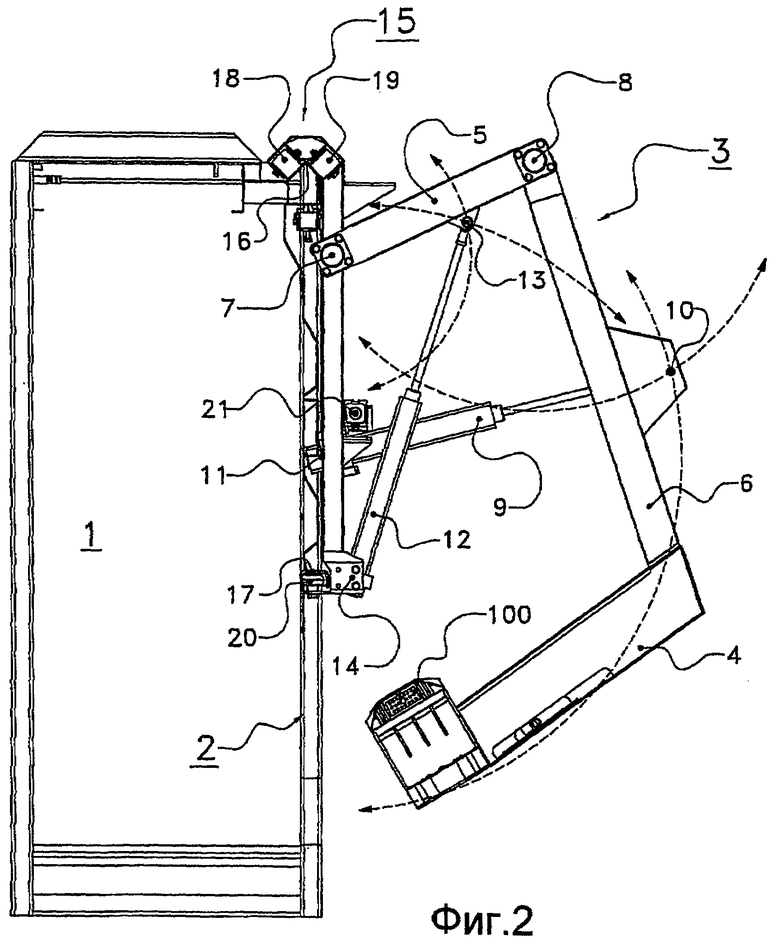
1. Устройство для автоматической дойки молочного скота, такого как корова, содержащее: доильный зал (1), датчик (100) для наблюдения за, по меньшей мере, частью молочного животного, например за соском (46), и доильный робот (3) для автоматического присоединения доильного стакана (28) к соску (46), при этом доильный робот (3) содержит устройство (120) управления роботом, которое оперативно соединено с датчиком (100); при этом датчик (100) содержит: источник излучения (108) для испускания электромагнитного излучения, в частности света, приемник (110) для приема электромагнитного излучения, отраженного от молочного животного, линзу (106) для воспроизведения отраженного электромагнитного излучения на приемнике (110) и средства управления датчиком, отличающееся тем, что датчик (100) содержит матрицу с множеством рядов и множеством колонок приемников (110), средства управления датчиком оперативно соединены с источником излучения (108) для модулирования электромагнитного излучения и средства управления датчиком предназначены для определения для каждого из приемников (110) разницы фаз между испускаемым и отражаемым электромагнитными излучениями для вычисления расстояний от датчика (100) до множества точек на молочном животном, при этом устройство (120) управления роботом выполнено с возможностью вычисления взаимного расстояния между доильным стаканом (28) и соском (46) и управления доильным роботом (3) на основании вычисленного взаимного расстояния, при этом средства управления датчиком предназначены для циклического определения разницы фаз между испускаемым и отражаемым электромагнитными излучениями для вычисления расстояний от датчика (100) до множества точек на соске (46) и на доильном стакане (28) и устройство (120) управления роботом предназначено для определения с помощью этого взаимной скорости между рассматриваемыми соединенными доильным стаканом (28) и соском (46).
2. Устройство по п.1, в котором устройство (120) управления роботом предназначено для наблюдения за соединением между рассматриваемыми соединенными доильным стаканом (28) и соском (46).
3. Устройство по п.1, в котором средства управления датчиком дополнительно предназначены для определения разницы фаз между испускаемым и отражаемым электромагнитными излучениями для вычисления расстояний от датчика (100) до множества точек на, по меньшей мере, одной ноге животного, подлежащего дойке, устройство (120) управления роботом предназначено для управления доильным роботом (3) также на этом основании.
4. Устройство по п.1, в котором устройство (120) управления роботом предназначено для определения того, следует ли подоить молочное животное, на основании вычисленных расстояний от датчика (100) до множества точек на соске (46) и/или на основании вычисленных расстояний от датчика (100) до множества точек на вымени.
5. Устройство по п.1, в котором устройство (120) управления роботом предназначено для идентификации молочного животного на основании вычисленных расстояний от датчика (100) до множества точек на молочном животном.
6. Устройство по п.1, в котором устройство (120) управления роботом предназначено для управления чистящими щетками для очистки соска (46) молочного животного на основании вычисленных расстояний от датчика (100) до множества точек на соске (46) молочного животного и/или на основании вычисленных расстояний от датчика (100) до множества точек на чистящих щетках.
7. Устройство по п.1, в котором устройство (120) управления роботом предназначено для обеспечения возможности начала процесса очистки доильного зала (1), если устройство (120) управления роботом устанавливает, что в доильном зале (1) нет молочного животного, на основании наблюдений датчика (100).
8. Устройство по п.1, дополнительно содержащее чистящее устройство для очистки, по меньшей мере, доильного стакана (28), в котором средства управления датчиком дополнительно предназначены для определения разницы фаз между испускаемым и отражаемым электромагнитными излучениями для вычисления расстояний от датчика (100) до множества точек на чистящем устройстве и устройство (120) управления роботом предназначено для управления на этом основании доильным роботом (3) таким образом, чтобы доильный стакан (28) перемещался к чистящему устройству для очистки.
9. Устройство по п.1, в котором средства управления датчиком предназначены для циклического определения разницы фаз между испускаемым и отражаемым электромагнитными излучениями для вычисления расстояний от датчика (100) до множества точек на молочном животном и устройство (120) управления роботом предназначено для определения с помощью этого взаимной скорости между датчиком (100) и соответствующим множеством точек на молочном животном.
10. Устройство по п.1, в котором длина волны модуляции испускаемого электромагнитного излучения составляет от 1 мм до 5 м.
11. Устройство по п.1, в котором длина волны может регулироваться, в частности переключаться, между, по меньшей мере, двумя значениями.
12. Устройство по п.1, в котором источник излучения (108) испускает излучение пульсирующим образом предпочтительно с частотой пульсации от 1 до 100 Гц.
13. Устройство по п.1, в котором источник излучения (108) имеет регулируемую интенсивность света и/или регулируемый угол излучения.
14. Устройство по п.1, в котором угол обзора датчика (100) является регулируемым.
15. Устройство по любому из предшествующих пунктов, в котором матрица с множеством рядов и множеством колонок приемников (110), а также предпочтительно источник излучения (108) расположены с возможностью поворота.
| СПОСОБ ПОЛУЧЕНИЯ ЭЛАСТИЧНЫХ ПОЛИУРЕТАНОВ | 0 |
|
SU360354A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| US 6234109 B1, 22.05.2001 | |||
| Устройство для распределения мощности между мотор-колесами скрепера | 1987 |
|
SU1537775A2 |
| Устройство виброзащиты кабины машиниста экскаватора | 1987 |
|
SU1537774A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ упаковки и консервации изделий со сложнорельефной поверхностью | 1980 |
|
SU880889A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ДОИЛЬНЫХ СТАКАНОВ | 1997 |
|
RU2143800C1 |

