Данное изобретение относится к доильной установке по ограничительной части п. 1 формулы изобретения.
Такую доильную установку применяют для машинного доения дойных животных. Дойными животными являются, например, коровы, буйволы, козы, овцы и т.д. Доильная установка содержит доильные станки, разделенные перегородками. Процесс дойки можно автоматизировать при помощи так называемых автоматических доильных установок. Например, применяют доильные карусели.
Термин доильная установка обозначает установку, содержащую доильные станки, причем угловое положение воображаемой продольной оси подвергаемого дойке животного в доильном станке относительно базовой линии может составлять от 0 до 90°. В качестве базовой линии, например, используется продольная сторона прямой траншеи или касательная к круговой траншее, являющейся местом пребывания персонала молочной фермы. Доильные установки представляют собой, например, подвижные и стационарные доильные установки. Подвижными доильными установками, например, являются доильные карусели с доением снаружи или изнутри, причем в обоих случаях возможен поворот в любую сторону. Так называемые доильные установки с параллельным расположением станков могут быть выполнены также в виде подвижных доильных установок. Кроме того, групповые доильные установки также могут быть стационарными, например, типа "елочка" или "тандем". Это перечисление дано только в качестве примера, при этом оно не является ограничительным.
В патентном документе ЕР 1 084 611 В1 описывается конструкция с рукой-манипулятором, содержащая поворотное опорное устройство для доильного аппарата. Эта конструкция может перемещаться на одной или
нескольких направляющих вдоль одного или нескольких доильных боксов.
Из-за незначительной производительности современная техника автоматизации не подходит для больших установок или подходит только с ограничениями. Все более повышающиеся требования, в особенности, в отношении высоких показателей производительности и непрерывной эксплуатации, требуют, чтобы современные автоматические доильные установки, которые являются сложными и дорогими, могли применяться совместно, на нескольких доильных площадках. Это может иметь отрицательные последствия, в том числе из-за большой сложности и связанной с ней высокой вероятностью отказа, периодического режима работы, недоступных для персонала участков (техника безопасности на роботизированных участках). Доступ к средствам установки ограничен во времени и пространстве. Загрязнение доильной техники при подводе доильных стаканов сзади, через ноги подвергаемых дойке животных может быть повышенным. Доильная установка может иметь лишь незначительный допуск в отношении отпадения доильных стаканов. Из-за сложной техники соответственно могут возникать большие затраты на эксплуатацию и техническое обслуживание.
На этом фоне задача данного изобретения заключается в создании усовершенствованной доильной установки и доильного станка.
Эта задача решается при помощи доильной установки с признаками пункта 1 формулы изобретения.
Предлагаемая доильная установка, в частности доильная карусель, содержит по меньшей мере один доильный станок для доения дойных животных, внутреннее роботизированное устройство, имеющее по меньшей мере одну руку-манипулятор, причем указанный по меньшей мере один доильный станок имеет две продольные стороны и две узкие стороны, а именно переднюю узкую сторону и заднюю узкую сторону, из которых одна
узкая сторона соответствует в качестве передней узкой стороны передней стороне подвергаемого дойке дойного животного, и рычажный механизм с доильным аппаратом, выполненный с возможностью перемещения из исходного положения в рабочее положение и обратно. Указанная по меньшей мере одна рука-манипулятор расположена, для перемещения рычажного механизма, на передней узкой стороне указанного по меньшей мере одного доильного станка доильной установки, которая соответствует передней стороне подвергаемых дойке животных. В доильной карусели рука-манипулятор может быть установлена во внутреннем пространстве доильной установки.
Доильный станок имеет две продольные стороны и две узкие стороны. Одна из этих узких сторон называется передней узкой стороной, которая соответствует передней стороне подвергаемого дойке животного, находящегося в доильном станке. Соответственно другая узкая сторона называется задней узкой стороной и соответствует задней части подвергаемого дойке животного, находящегося в доильном станке.
В доильной установке с расположенными рядом друг с другом прямоугольными доильными станками, каждый из которых имеет параллельные продольные стороны, как это имеет место, например, в доильной установке с параллельным расположением станков, рычажный механизм установлен, например, в перегородке параллельно воображаемой продольной оси подвергаемого дойке животного. При этом для упрощения предполагается, что во время доения подвергаемое дойке животное спокойно стоит со своей воображаемой продольной осью в идеальном состоянии. Одна узкая сторона, а именно передняя узкая сторона, доильного станка соответствует передней стороне подвергаемого дойке животного.
В случае доильной установки с расположенными по кругу станками, например, в доильной карусели, продольные стороны доильных станков не параллельны. В этом случае продольные стороны представляют собой отрезки радиусов круга доильной карусели и пересекаются в воображаемом продолжении в центре этого круга или в центре поворота карусели, причем они образуют центральный угол. Воображаемая продольная ось подвергаемого дойке животного в идеальном случае проходит также через центр поворота и делит этот центральный угол пополам. Ниже этот случай для краткости обозначается, как "приблизительно параллельно".
Под термином "наружная зона" или "зона обслуживания" следует понимать зону, в которой находится персонал молочной фермы, но в которой не установлены роботы. Это может быть, например, зона вокруг внешнего периметра доильной карусели или зона траншеи между двумя расположенными в линию доильными установками с параллельным расположением станков.
Термин "техническая зона" обозначает зону, в которой расположено роботизированное устройство.
В одном из вариантов осуществления предусмотрено, что в исходном положении рычажный механизм с доильным аппаратом расположен вдоль одной из продольных сторон доильного станка, сбоку от подвергаемого дойке животного. Благодаря этому в исходном положении рычажный механизм с доильным аппаратом находится вне области подвергаемого дойке животного и не мешает ему, например, при входе в доильный станок.
В одном из вариантов осуществления рука-манипулятор предназначена для перемещения рычажного механизма в автоматическом режиме из исходного положения в рабочем положении в положение установки для автоматической установки доильного аппарата на соски подвергаемого дойке животного.
В одном из вариантов осуществления рука-манипулятор, в частности, в зоне установки может перемещаться и направляться по направляющей.
Кроме того, в другом варианте осуществления на платформе по направляющей могут перемещаться и направляться несколько рук-манипуляторов.
Если доильная установка выполнена в виде доильной карусели, то направляющая расположена концентрически относительно центра поворота карусели, а в линейной доильной установке, например, с параллельным расположением станков, направляющая расположена параллельно доильной установке.
В еще одном варианте осуществления направляющая закреплена на доильной установке. Благодаря этому перемещение доильной установки, например, в случае доильной карусели, поворот по часовой стрелке или против часовой стрелки, может синхронно передаваться направляющей и, следовательно, по меньшей мере одной руке-манипулятору.
Альтернативно указанная по меньшей мере одна рука-манипулятор внутреннего роботизированного устройства может перемещаться по направляющей синхронно с перемещением доильной установки и независимо от перемещений доильной установки.
При помощи указанной по меньшей мере одной руки-манипулятора обеспечивается возможность доступа к каждому доильному станку. Для установки доильного аппарата требуется только одно внутреннее роботизированное устройство с указанной по меньшей мере одной рукой-манипулятором.
Рука-манипулятор может осуществлять один за другим все процессы установки. При этом в случае нескольких рук-манипуляторов повышается производительность.
Чтобы выполнять не только процессы установки, но и процессы снятия, по направляющей также могут перемещаться или располагаться в разных зонах и перемещаться в этих зонах несколько рук-манипуляторов. Благодаря этому обеспечивается высокая приспособляемость к разным режимам работы.
В еще одном варианте осуществления доильные аппараты могут сниматься при помощи рычажного механизма и простых исполнительных устройств, например, цепей или тросов, которые находятся на каждом доильном станке.
Еще одно преимущество состоит в том, что все доильные станки могут быть оснащены одинаковым рычажным механизмом и доильным аппаратом, т.е. пассивным механическим доильным модулем, при этом не требуются приводы, или на каждый доильный станок требуются лишь простые приводы для снятия.
Если каждый доильный станок оснащен одинаковым доильным модулем, т.е. рычажным механизмом и доильным аппаратом, то не могут возникнуть механические связи со смежными доильными станками.
Направляющая предпочтительно расположена над подвергаемыми дойке животными, при этом, таким образом, она находится вне их зоны досягаемости. При этом возможно уменьшение риска загрязнения.
Предпочтительные усовершенствованные варианты осуществления доильного аппарата и доильного станка являются предметом соответствующих зависимых пунктов формулы изобретения.
Подвергаемые дойке животные могут входить в доильную установку и выходить из нее через один или несколько входов и выходов. Таким образом, при наличии нескольких рук-манипуляторов возможна высокая производительность.
В другом варианте осуществления направляющая расположена параллельно доильной установке. Благодаря этому указанная по меньшей мере одна рука-манипулятор внутреннего роботизированного устройства может перемещаться по направляющей синхронно с перемещением доильной установки и независимо от перемещения доильной установки. Другими словами, во время перемещения доильной установки рука-манипулятор может выполнять установку доильного аппарата, затем отвести его в исходное положение, переместиться по направляющей против перемещения доильной установки к следующему доильному станку и снова выполнить установку. В случае нескольких рук-манипуляторов скорость совокупности всех рук-манипуляторов определяется самой медленной рукой.
В еще одном варианте осуществления предусмотрено, что указанная по меньшей мере одна рука-манипулятор выполнена с возможностью перемещения в радиальном направлении для перемещения доильного аппарата из исходного положения в рабочее положение и обратно. Таким образом, рука-манипулятор использует для захвата только одно направление в одной плоскости. Захватная часть может обеспечить дополнительные оси манипулирования для позиционирования доильного аппарата.
В альтернативном варианте осуществления указанный по меньшей мере один доильный станок имеет вышерасположенную часть, отделенную ступенькой от поверхности платформы доильного станка и имеющую плиту для передних ног. Таким образом, рука-манипулятор расположена вне поля зрения животного.
При этом указанная по меньшей мере одна рука-манипулятор может быть выполнена с возможностью перемещения в радиальном направлении, сбоку и параллельно или по существу приблизительно параллельно продольной оси подвергаемого дойке животного. Таким образом, она проходит в области, расположенной на некотором расстоянии от области, содержащей грязь и влагу подвергаемого дойке животного.
В альтернативном варианте осуществления указанная по меньшей мере одна рука-манипулятор может быть выполнена с возможностью перемещения в радиальном направлении по продольной оси подвергаемого дойке животного. При этом рука-манипулятор большую часть пути проходит под плитой для передних ног, что также происходит незаметно для животного. Указанная по меньшей мере одна рука-манипулятор выполнена при этом с возможностью перемещения в радиальном направлении также в направлении продольной оси подвергаемого дойке животного, через отверстие в ступеньке.
В еще одном варианте осуществления в исходном положении рычажный механизм с доильным аппаратом расположен в перегородке, расположенной на продольной стороне доильного станка, или в области на продольной оси перегородки, и может перемещаться в рабочее положение в боковом направлении к подвергаемому дойке животному. Таким образом, доильный аппарат также находится вне области, содержащей грязь и влагу подвергаемого дойке животного.
В еще одном варианте осуществления предусмотрено, что рычажный механизм имеет верхнее плечо и соединенное с ним с возможностью поворота нижнее плечо. Таким образом, рычажный механизм с доильным аппаратом может складываться и устанавливаться в исходное положение, занимая небольшое пространство.
При этом рычажный механизм установлен посредством подшипникового узла с возможностью поворота и направления в вертикальном направлении. Подшипниковый узел может быть расположен над подвергаемым дойке животным, под платформой указанного по меньшей мере одного доильного станка или на платформе указанного по меньшей мере одного доильного станка. Таким образом, обеспечивается возможность согласования с различными монтажными положениями.
В еще одном варианте осуществления в исходном положении рычажный
механизм с доильным аппаратом может быть расположен в перегородке, в отверстии кожуха перегородки. Таким образом, когда животное входит в доильный станок, рычажный механизм с доильным аппаратом полностью находятся вне поля зрения подвергаемого дойке животного. Кроме того, кожух обеспечивает не только незаметность, но и лучшую защиту от травм подвергаемого дойке животного, а также защиту от грязи и влаги, если отверстие в кожухе перегородки вместе с расположенным в нем в исходном положении рычажным механизмом с доильным аппаратом выполнено с возможностью закрытия его предохранительной крышкой. Предохранительная крышка может иметь приводные части, например, утопленные отверстия с крючками, приводимые в действие рукой-манипулятором.
Еще одно преимущество обеспечивается, если в перегородке или в области исходного положения рычажного устройства с доильным аппаратом расположено устройство для очистки доильного аппарата. Благодаря тому, что в исходном положении для сложенного рычажного механизма с доильным аппаратом требуется мало места, устройство для очистки также может быть расположено в области продольной оси перегородки и/или в самой перегородке, и/или оно может быть встроено в перегородку.
В еще одном дополнительном варианте осуществления рычажный механизм с доильным аппаратом имеет защиту от перегрузки. В результате обеспечивается допуск в отношении энергичных движений животного, активное уклонение посредством распознавания объекта при помощи камеры, применяемой также с целью позиционирования и решения других задач. Кроме того, если рука-манипулятор выполнена с контролем мощности, потребляемой ее двигателями, то при позиционировании может быть обеспечена защита от защемления рукой-манипулятором. Для этого на руке-манипуляторе могут быть установлены дополнительные датчики. Кроме того, при позиционировании рука-манипулятор, например, может активировать пассивные датчики на доильном аппарате и/или рычажном
механизме.
Для простого манипулирования при позиционировании при помощи руки-манипулятора рычажный механизм может иметь параллелограммный механизм для доильного аппарата.
Этот параллелограммный механизм может содержать толкающие штанги и/или тянущие средства. Предпочтительно он может быть встроен в плечи рычажного устройства. Тянущие средства могут представлять собой, например, ремни. В этом случае тянущие средства сами могут образовывать или поддерживать защиту от перегрузки, так как они обладают определенной эластичностью. Несмотря на это, также могут быть предусмотрены дополнительные пружины и амортизаторы, соединенные с тянущими средствами, например, натяжные устройства.
В еще одном варианте осуществления предусмотрено, что рука-манипулятор имеет по меньшей мере один датчик положения. Этот датчик может применяться для позиционирования доильных стаканов доильного аппарата на вымени. Однако благодаря этому возможны и дополнительные преимущества. Датчик положения может представлять собой оптический датчик, например, камеру, регистрирующую движения подвергаемого дойке животного. Кроме того, датчик положения можно использовать в качестве устройства ввода при управлении жестами. Кроме того, камера может снимать вымя с сосками, благодаря чему можно оценить здоровье вымени (аномалии, внешний вид, отеки, чистота). Благодаря этому можно отсортировать больных животных и животных с грязным выменем (при помощи автоматической установки, например, сортировочного устройства, или персонала). Можно контролировать выделения подвергаемых дойке животных, благодаря чему по мере необходимости возможна чистка доильного станка. Доильные стаканы могут быть прозрачными или иметь опционально встроенные контрастные элементы (кольца, стержни, цилиндры и т.д.). Прозрачность позволяет контролировать правильное расположение
сосков в доильных стаканах и поток молока. Контрастные элементы предназначены для обнаружения доильных стаканов и калибровки камеры датчика положения.
Доильные станки могут иметь на полу платформы скошенный желоб для навоза, предназначенный для уменьшения загрязнения подвергаемых дойке животных падающими экскрементами.
Рука-манипулятор может иметь дополнительные датчики, соединенные с ее управлением. Например, управление при помощи камеры, в результате жестов и посредством акустических датчиков может включать и выключать, убирать и выдвигать, и/или чистить компоненты руки-манипулятора, рычажное устройство и/или доильный аппарат.
Доильная установка также может иметь не круглую, а другую форму. Например, возможна дугообразная или прямая форма.
В альтернативном варианте осуществления рычажный механизм может при помощи простого исполнительного устройства перемещаться в полуавтоматическом режиме из исходного положения в рабочее положение, причем рабочее положение представляет собой фиксированное предварительное положение, предварительно заданное стопорным средством, причем в предварительном положении доильный аппарат находится в удобном для дояра положении.
Остальные преимущества перечислены ниже.
- Модульная, гибкая конструкция доильного модуля подходит для отдельных доильных станков, групповых доильных станков и доильных каруселей.
- Высокая производительность труда.
- Высокая эксплуатационная готовность благодаря избыточным доильным модулям и нескольким рукам-манипуляторам.
-
- Избыточная конструкция с высокой отказоустойчивостью.
- Допуск в отношении энергичных движений животных и ударов/толчков.
- Персонал может в любой момент времени войти в наружную зону, совершенно безопасно и не встречая препятствий, например, чтобы вмешаться с целью коррекции и/или помощи. Внутреннее пространство занято внутренним роботизированным устройством лишь частично. Не требуется дополнительная защита роботизированного участка в технической зоне, так как персонал находится в наружной зоне, а робот расположен во внутреннем пространстве и отделен от персонала.
- Высокая приспособляемость к различным степеням автоматизации.
- Руки-манипуляторы и доильные аппараты при входе в доильный станок и частично при установке и снятии находятся вне поля зрения подвергаемых дойке животных.
- Простой монтаж и демонтаж, несложное техническое обслуживание доильной установки.
- Благодаря резервной системе возможно аварийное доение. Дояр может извне вмешаться в процесс, происходящий в любом доильном станке, и, например, снова прикрепить отпавший или сбитый доильный аппарат.
- Процесс установки происходит гигиенически - сбоку.
- Низкая степень сложности.
- Возможность применения при массовом производстве.
- Возможность уменьшения многообразия вариантов.
- Возможность дооснащения площадок для ручного доения.
Дополнительные преимущества и подробности следуют из варианта осуществления, показанного на чертежах. На чертежах показано следующее.
Фиг. 1. Схематичный вид сверху первого варианта осуществления предлагаемой доильной установки.
Фиг. 2. Схематичный вид сверху варианта варианта осуществления согласно фиг. 1.
Фиг. 3. Схематичный вид сбоку предлагаемой доильной установки, изображенной на фиг. 2.
Фиг. 4. Увеличенное изображение области, обозначенной на фиг. 3 кругом.
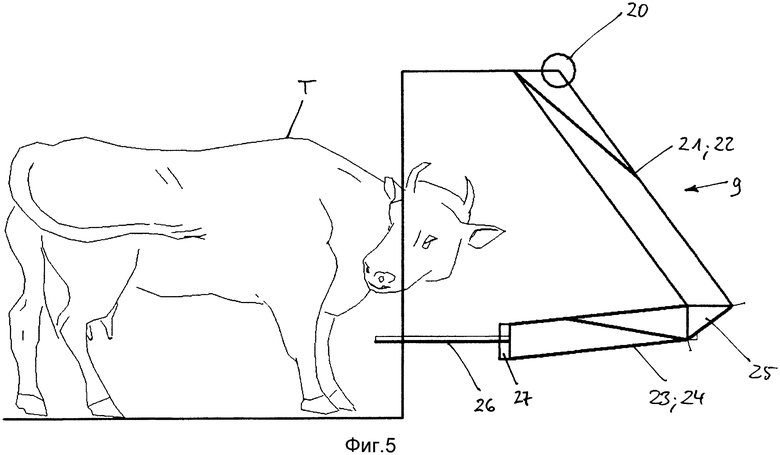
Фиг. 5. Схематичный чертеж внутреннего робота.
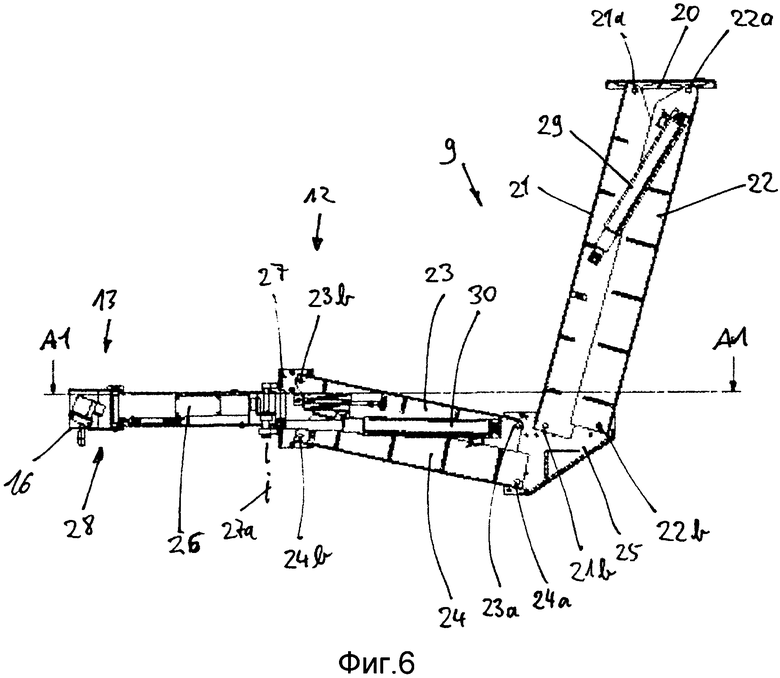
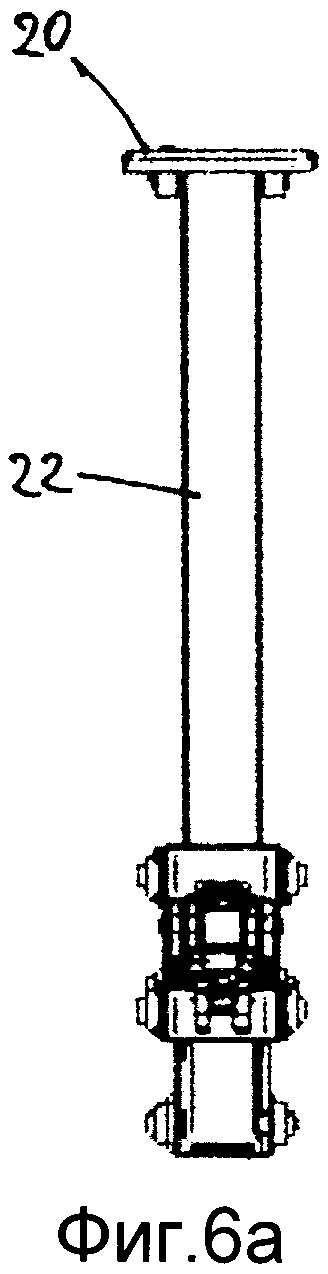
Фиг. 6, 6а. Продольный разрез и вид спереди варианта осуществления руки-манипулятора.
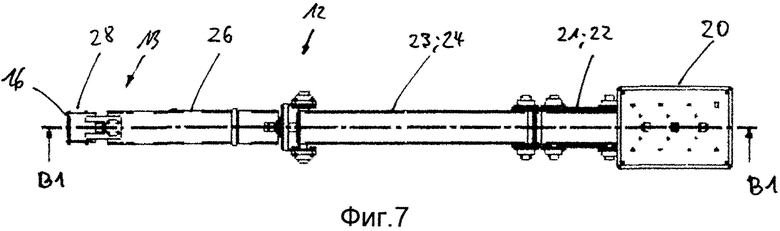
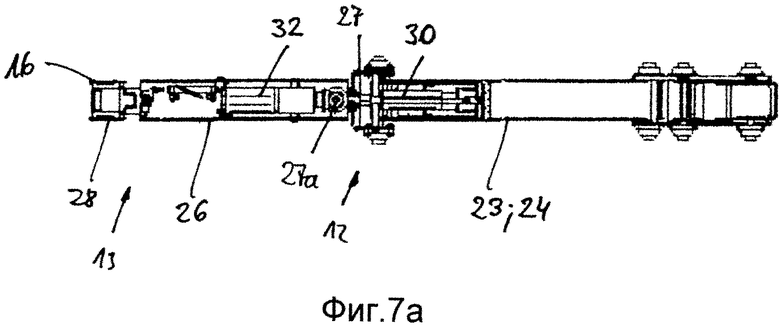
Фиг. 7, 7а. Различные разрезы руки-манипулятора, изображенной на фиг.
6.
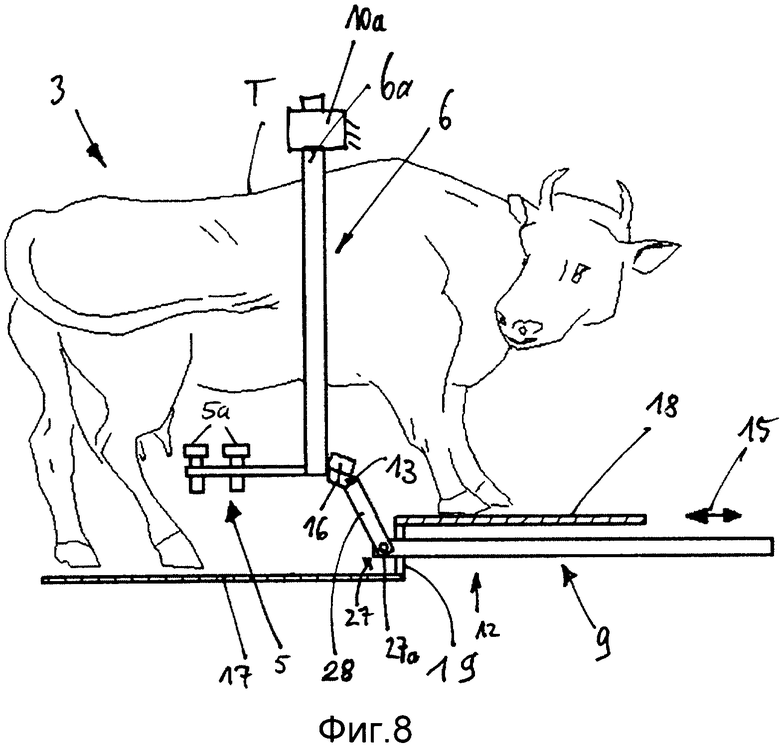
Фиг. 8. Схематичный вид второго варианта осуществления доильного станка предлагаемой доильной установки.
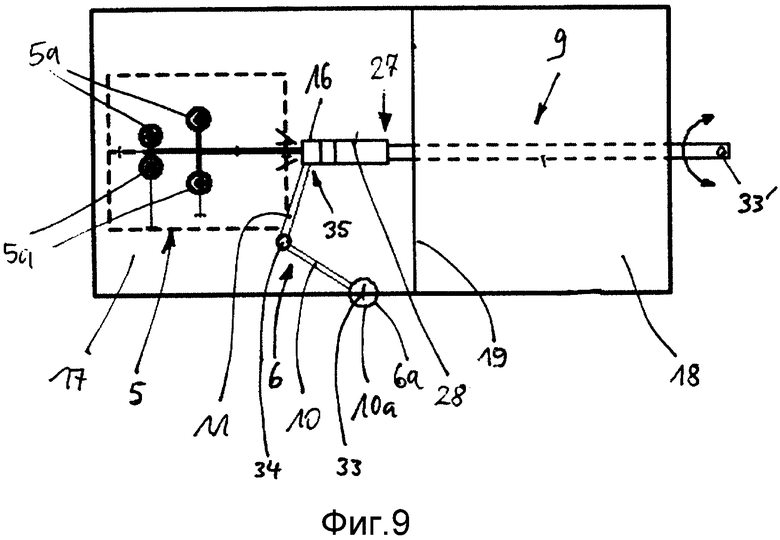
Фиг. 9. Схематичный вид сверху доильного станка, изображенного на фиг. 8.
Одинаковые или аналогичные функциональные элементы отмечены на чертежах одними и теми же номерами позиций.
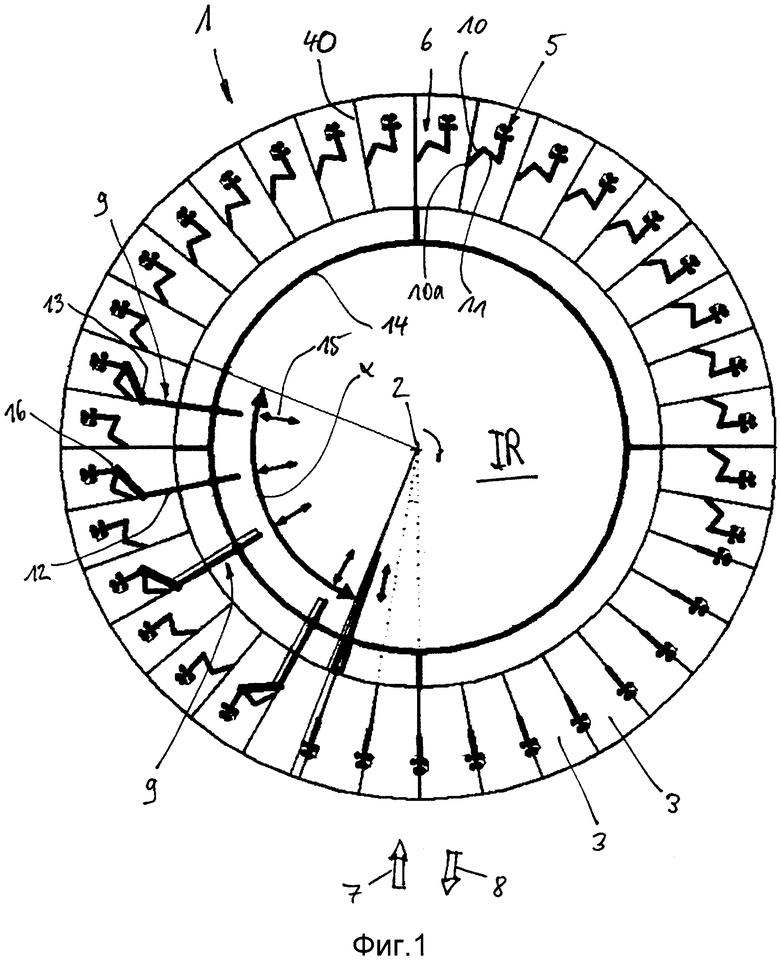
На фиг. 1 показан схематичный вид сверху первого варианта осуществления предлагаемой доильной установки 1.
Доильная установка 1 устроена по типу так называемой доильной карусели с доением снаружи. При этом подвергаемые дойке животные стоят так, что их головы направлены к центру, т.е. к центру 2 поворота. Карусель может поворачиваться вокруг центра 2 поворота по часовой стрелке. В этом варианте осуществления по периметру карусели расположено тридцать
шесть доильных станков 3. Каждый доильный станок имеет две продольные стороны и две узкие стороны. Одна из этих узких сторон обозначается как передняя узкая сторона, она соответствует передней стороне подвергаемого дойке животного, находящегося в доильном станке 3. На фиг. 1 передние узкие стороны доильных станков 3 обращены к внутреннему пространству IR. Другие узкие стороны, также обозначаемые как задние узкие стороны, соответствуют задней части подвергаемого дойке животного. Доильные станки 3 разделены перегородками 40. Под перегородками 40 также понимаются, например, боковые решетки, при этом перегородки расположены приблизительно параллельно продольной оси подвергаемого дойке животного. Доильную установку 1 применяют для машинного доения дойных животных, например, коров, при помощи доильных аппаратов 5. Для каждого доильного станка 3 предусмотрен доильный аппарат 5, который при помощи рычажного механизма 6 может перемещаться в доильном станке 3 из исходного положения в рабочее положение, под вымя коровы. Каждый доильный аппарат 5 расположен между доильными станками 3 внутри перегородки 40 или в продольной части перегородки 40.
Подвергаемые дойке животные могут входить на карусель через вход 7, а по завершении доения снова выходить из нее через выход 8. После входа животного в доильный станок 3 важно, чтобы оно заняло определенное положение. Это достигается благодаря тому, что перегородки 40 образуют огороженный доильный станок 3. В этом случае в круговом сегменте, который здесь обозначается, как зона б установки, доильный аппарат 5 из исходного положения в перегородке 40 сбоку животного перемещается к подвергаемому дойке животному в рабочее положение, под вымя животного и при помощи датчика 16 положения (см. также 9) устанавливается к вымени.
Для перемещения рычажного механизма 6 с доильным аппаратом 5 во внутреннем пространстве IR доильной установки 1, на передних узких сторонах доильных станков 3 предусмотрены средства установки в виде внутреннего роботизированного устройства. В этом варианте осуществления
внутреннее роботизированное устройство содержит пять рук-манипуляторов 9, которые могут перемещаться независимо друг от друга по направляющей 14. Ниже более подробно описана рука-манипулятор 9. Каждая рука-манипулятор 9 имеет прямолинейную радиальную часть 12 и захватную часть 13, которая может поворачиваться вокруг вертикальной оси 27а запястья на наружном конце радиальной части 12 (см. фиг. 6). В этом варианте осуществления направляющая 14 расположена над доильными станками 3, за пределами досягаемости животных и защищена от загрязнения. В случае доильной установки 1, которая здесь выполнена в виде доильной карусели с центром 2 поворота, направляющая 14 также имеет круглую форму и расположена концентрически относительно круглой конструкции доильной карусели с центром 2 поворота доильной карусели в качестве центра. Таким образом, при повороте доильной установки 1 синхронно с этим поворотом также поворачиваются руки-манипуляторы 9. Поворот доильной установки 1 может поддерживаться и сохраняться непрерывно.
Это означает, что как только животное входит в доильный станок 3, успокаивается и готово к доению, что может быть распознано, например, при помощи соответствующей сенсорной техники (например, камера, датчик перемещения, акустический датчик и т.д.) и исполнительных устройств (например, для выдачи и приема корма), при этом рука-манипулятор 9 из исходного положения на передних узких сторонах доильных станков 3 во внутреннем пространстве IR, в котором она до доильных станков 3 не достает, перемещается в радиальном направлении 15 наружу, между двумя доильными станками 3, в область перегородки 40, в свое положение установки, захватывает часть рычажного механизма 6 и перемещает его из области перегородки 40 в боковом направлении, из исходного положения в рабочее положение, под вымя животного. Таким образом, доильный аппарат 5 в доильном станке 3 устанавливается сбоку к подвергаемому дойке животному и позиционируется сбоку животного, под его выменем. При этом поддерживается процесс установки доильного аппарата 5. Рычажный механизм 6 держит доильный станок 5, доильные стаканы которого подведены к соскам вымени.
Сразу же после установки доильного аппарата 5 рука-манипулятор 9 отсоединяется от рычажного механизма 6 и перемещается в радиальном направлении 15, назад во внутреннее пространство IR, в свое исходное положение. Рычажный механизм 6 поддерживает доильный аппарат 5 и, следовательно, его вес, причем доильные стаканы, подведенные к соскам вымени, создают нагрузку, которая меньше веса доильного аппарата 5 и рычажного аппарата 6, включая шланги. В течение этого процесса установки доильная карусель продолжает непрерывно поворачиваться, в данном случае по часовой стрелке, вокруг центра 2 поворота. Конечно, также возможен поворот против часовой стрелки. В процессе установки рука-манипулятор 9 (или другие руки-манипуляторы) перемещается (перемещаются) по направляющей 14, предпочтительно в зоне б установки, с тем же направлением поворота и с той же угловой скоростью, что доильная карусель. В этом варианте осуществления направляющая 14 расположена над доильными станками 3, за пределами досягаемости животных и защищена от загрязнения. Предпочтительно она закреплена на доильной установке 1, т.е. на ее движущейся части.
Рычажный механизм 6 имеет верхнее плечо 10 и нижнее плечо 11. Посредством конца верхнего плеча 10 он установлен и направлен с возможностью перемещения в подшипниковом узле 10а в перегородке 40 с возможностью поворота вокруг вертикальной оси 33 (см. фиг. 9) и вертикального перемещения вдоль вертикальной оси 33. Подшипниковый узел 10а может быть установлен на перегородке 40 внизу или вверху, над подвергаемым дойке животным (см. также фиг. 8). Рычажный механизм 6 предназначен для того, чтобы переносить доильный аппарат 5 со сбалансированным весом, при этом указанный механизм должен иметь такой легкий ход, чтобы он мог следовать за движениями подвергаемого дойке животного. Более подробно рычажный механизм 6 описан ниже.
Направляющая 14 может быть выполнена в виде монорельсовой направляющей или многорельсовой направляющей. Предпочтительно она может представлять собой либо полный круг, либо круговой сегмент. Так как руки-манипуляторы 9 могут действовать между доильными станками 3 для установки и возврата рычажного механизма 6 с доильным аппаратом 5 только в ограниченной зоне б установки, направляющая 14 может быть выполнена в виде квадранта. Направляющая 14 также может образовывать, например, полукруг, причем один квадрант этого полукруга содержит руки-манипуляторы 9 для установки в зоне б установки, а другой квадрант, расположенный рядом против часовой стрелки, имеет другие руки-манипуляторы 9 для снятия и возврата рычажных механизмов 6 с доильным аппаратом 5 в исходное положение.
Все доильные станки 3 на внешнем периметре доильной установки 1 доступны для дояра M снаружи, т.е. с задних узких сторон доильных станков 3, так что дояр может в любой момент времени вмешаться в процесс доения. Поэтому в этой рабочей зоне дополнительные устройства отсутствуют. Напротив, руки-манипуляторы 9 работают только в ограниченной области внутреннего пространства IR. Таким образом, когда дояр M управляет всей доильной установкой 1, которая в данном варианте осуществления также носит название "автоматизированная доильная карусель с доением снаружи", осуществляет техническое обслуживание и вмешивается в ее работу, никаких препятствий он не встречает. Доильная карусель может продолжать поворачиваться даже тогда, когда необходимо ручное вмешательство дояра, например, в случае отсоединения доильных стаканов доильного аппарата 5.
По завершении процесса доения доильный аппарат 5 автоматически снимается с подвергаемого дойке животного или опускается сам в положение ожидания или окончания доения. Затем доильный аппарат 5 может быть перемещен в исходное положение при помощи простого исполнительного устройства, например, цепи или троса. Это простое исполнительное устройство может быть установлено на перегородке 40. Доильная карусель продолжает поворачиваться и в течение этого процесса.
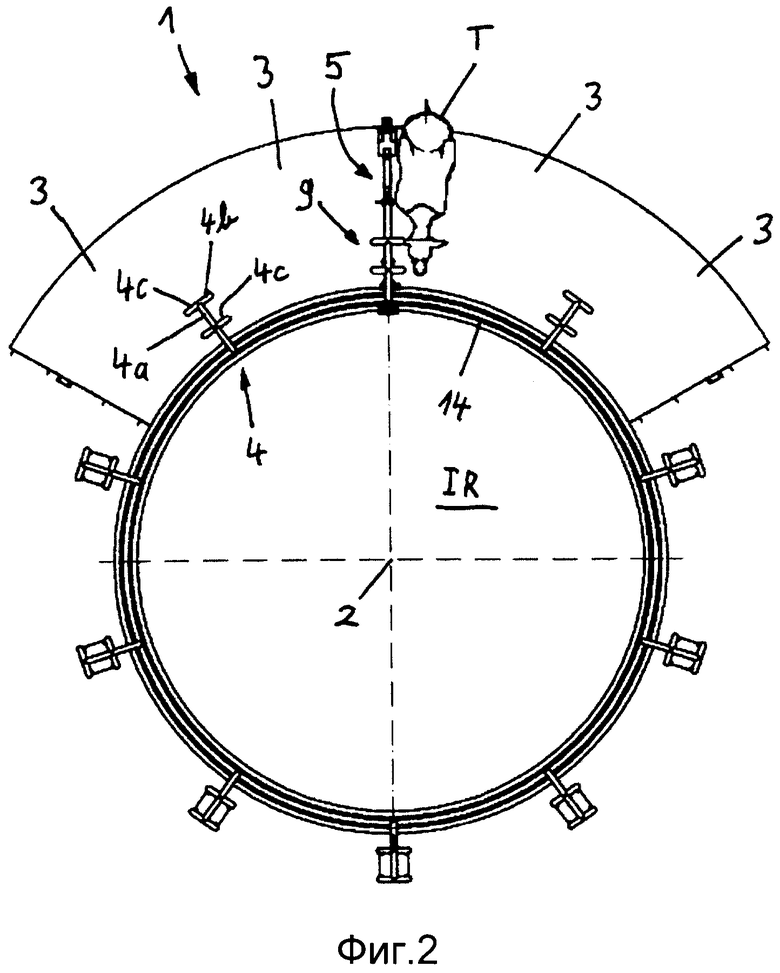
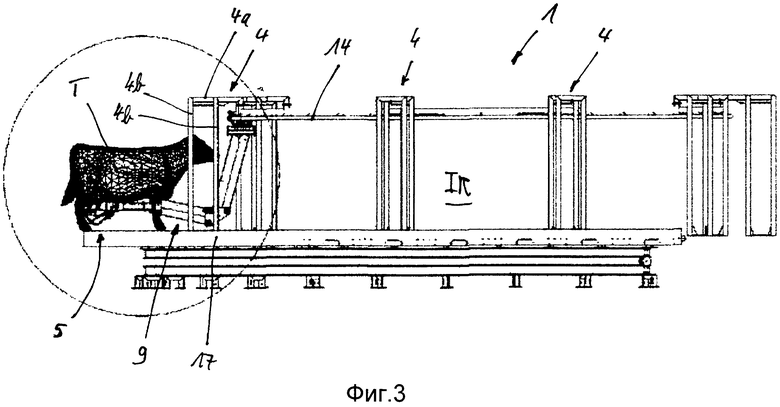
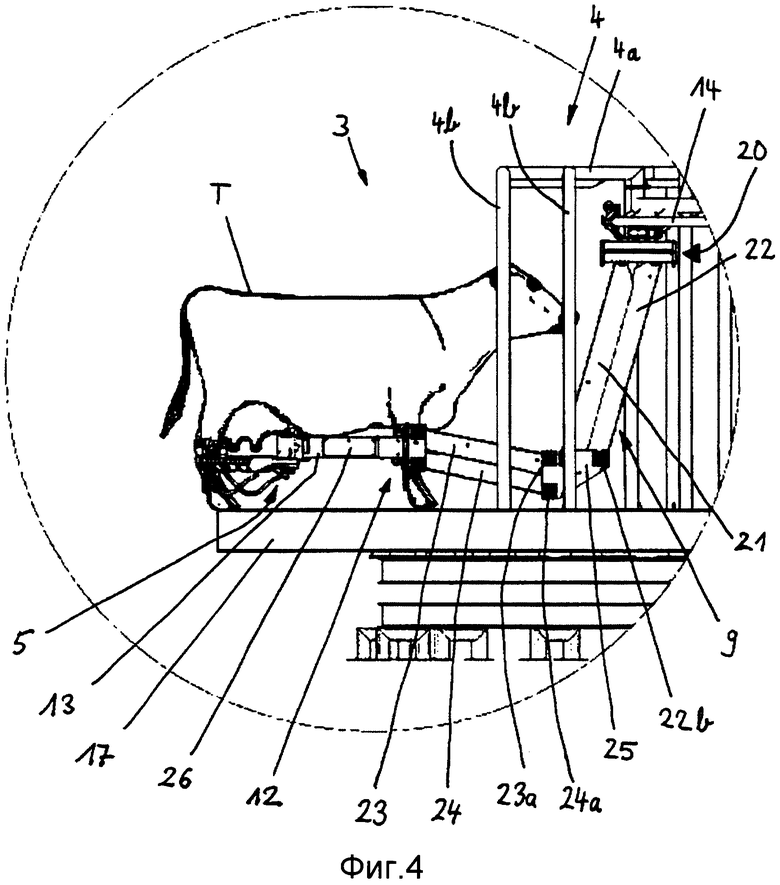
На фиг. 2 показан схематичный вид сверху варианта осуществления доильной установки, изображенной на фиг. 1. На фиг. 3 показан схематичный вид сбоку предлагаемой доильной установки 1, изображенной на фиг. 2, а на фиг. 4 - увеличенное изображение области, обозначенной на фиг. 3 кругом.
Показанный здесь вариант осуществления также представляет собой доильную карусель с доильными станками 3, разделенными направленными к внутреннему пространству IR перегородками 40 (см. фиг. 1), которые здесь не изображены. В доильном станке 3 находится подвергаемое дойке животное Т, в данном случае корова. На фиг. 2 показана расположенная по кругу направляющая 14 в форме круга, которая установлена на опорах 4 направляющей над доильными станками 3 (это наглядно показано на фиг. 3 и 4). Здесь каждая опора 4 направляющей содержит горизонтальную распорку 4а и четыре вертикальных подпорки 4b, причем в каждом случае верхние концы двух вертикальных подпорок 4b соединены при помощи поперечной связи 4с. Поперечные связи 4с проходят тангенциально к доильной карусели и поддерживают горизонтальную распорку 4а, проходящую в радиальном направлении доильной карусели. На своем радиальном наружном конце и посредине горизонтальная распорка 4а соединена с поперечными связями 4с. Другой конец горизонтальной распорки 4а, направленный к центру 2 поворота доильной установки 1, поддерживает направляющую 14, в данном случае в варианте осуществления с двойными рельсами. Направляющая 14 имеет форму круга и предназначена для перемещения рук-манипуляторов 9, из которых здесь показана только одна рука. Здесь рука-манипулятор 9 перемещена в свое рабочее положение, в промежуток между двумя вертикальными подпорками 4b опоры 4 направляющей.
На фиг. 3 конструкция опоры 4 направляющей показана более наглядно в виде сбоку. Доильная установка 1, выполненная в виде доильной карусели, имеет платформу 17, которая может поворачиваться вокруг центра 2 поворота. На платформе 17 расположены доильные станки 3 с опорами 4
направляющей. На платформе 17 установлены вертикальные подпорки 4Ь опор 4 направляющей. Рука-манипулятор 9 находится в рабочем положении, в котором устанавливается доильный аппарат 5, как наглядно показано в увеличенном виде на фиг. 4.
Процесс установки рычажного механизма 6 с доильным аппаратом 5 в радиальном направлении перегородки 40 (см. фиг. 1) не показан, но легко представим. Процесс установки выполняется так, что при входе животного Ф в доильный станок 3 животное Ф никаких препятствий не встречает и предпочтительно защищено.
В этом варианте осуществления рука-манипулятор 9 внутреннего роботизированного устройства имеет каретку 20, верхнее плечо 21 - 22, нижнее плечо 23 - 24, уголок 25 и часть 26 захватного устройства с захватной частью 13.
При помощи каретки 20 рука-манипулятор 9 закреплена на направляющей 14. В каретке 20 расположен подробно не показанный привод перемещения, при помощи которого рука-манипулятор 9 может перемещаться вдоль направляющей 14.
При дальнейшем описании руки-манипулятора 9 даны ссылки на фиг. 5, 6 - 6а и 7 - 7а. Фиг. 5 представляет собой схематичный вид внутреннего робота. Фиг. 6 представляет собой продольный разрез варианта выполнения руки-манипулятора 9, а фиг. 6а - вид спереди. Фиг. 7 представляет собой разрез руки-манипулятора 9 по линии А1-А1 (см. фиг. 6), а фиг. 7а - разрез по линии В1-В1 (см. фиг. 7).
Фиг. 5 наглядно показывает, что для перемещения рычажного механизма 6 (см. фиг. 1) рука-манипулятор 9 установлена на передней узкой стороне по меньшей мере одного доильного станка 3 доильной установки 1, которая соответствует передней стороне подвергаемых дойке животных Т.
Рука-манипулятор 9 имеет параллелограммный механизм своего верхнего плеча 21, 22 и своего нижнего плеча 23, 24, соединенных посредством уголка 25, а также шарнирное соединение верхнего плеча 21, 22 с кареткой 20 и шарнирное соединение нижнего плеча 23, 24 с запястьем 27. Рука-манипулятор 9 вводится в радиальном направлении, сбоку подвергаемого дойке животного Т, в область перегородки 40, проходящую в радиальном направлении рядом с животным Т, с целью захвата доильного аппарата 5 на рычажном механизме 6. При этом ноги животного Ф касаются. Установка доильного аппарата 5 осуществляется сбоку животного Т, как это делает дояр при обычном ручном доении. Таким образом, процесс установки представляет собой обычный процесс, при котором не требуется вводить какие-либо устройства вдоль продольной оси животного Т, между ногами животного Т.
В предпочтительном варианте осуществления руки-манипуляторы 21, 22 и 23, 24 выполнены в виде рук с параллелограммным механизмом, в виде U-образных профилей. Эти вставленные друг в друга профили образуют соответственно кожухи для приводов 29, 30 (см. фиг. 6 и 7). Таким образом, руки-манипуляторы 21, 22 и 23, 24 одновременно служат в качестве параллелограммного механизма и кожуха. Благодаря такому покрытию кожухом приводов 29, 30, с одной стороны, эти приводы защищены от грязи и влаги, а с другой стороны, человек и животное защищены от травм, в особенности от ушибов.
Верхнее плечо 21, 22 имеет два расположенных рядом друг с другом элемента 21, 22, которые соответственно своими верхними концами при помощи оси 21а, 22а каретки закреплены на каретке 20 с возможностью поворота. Нижние концы верхнего плеча 21, 22 соответственно соединены с возможностью поворота шарнирно при помощи оси 21 b, 22b уголка на верхней стороне уголка 25. Эта верхняя сторона представляет собой катет уголка 25, выполненного в виде прямоугольного треугольника.
Уголок 25 можно рассматривать, как нечто вроде локтевого сустава. На катете нижнего плеча 23, 24, расположенном с наружной радиальной стороны, соответственно при помощи оси 23а, 24а установлены с возможностью поворота концы обоих элементов 23 и 24. Передние концы нижнего плеча 23, 24 соответственно при помощи оси 23b, 24Ь запястья шарнирно соединены с возможностью поворота на запястье 27. На запястье 27 при помощи оси 27а запястья закреплена с возможностью поворота часть 26 захватного устройства. Радиальный наружный конец части 26 захватного устройства поддерживает захватное устройство 28, с которым он образует захватную часть 13. Захватное устройство 28 соответствующим образом выполнено для взаимодействия с рычажным механизмом 6. Радиальная часть 12 руки-манипулятора 9 образована нижним плечом 23, 24 и частью 26 захватного устройства.
Элементы верхнего плеча 21, 22 соединены с приводом 29 верхнего плеча, который представляет собой, например, пневмоцилиндр, гидроцилиндр или электрический привод. Равным образом элементы нижнего плеча 23, 24 соединены с приводом 30 нижнего плеча, который может представлять собой, например, пневмоцилиндр.
На виде в разрезе (см. фиг. 7а) внутри нижнего плеча 23, 24, в области запястья 27 видна часть привода 30 нижнего плеча. С другой, в данном случае левой, стороны запястья 27 внутри части 26 захватного устройства расположен поворотный привод, выполняющий поворот части 26 захватного устройства вокруг оси 27а запястья, относительно нижнего плеча 23, 24. Повернутое положение показано, например, на фиг. 1. Кроме того, внутри части 26 захватного устройства может быть расположен подробно не показанный привод захвата, который приводит в действие захватную часть 16 захватного устройства 28 для захвата и отпускания рычажного устройства 6.
Оси 21a-b, 22a-b, 23a-b, 24а-b расположены параллельно и проходят под прямым углом к вертикалям или тангенциально к доильной карусели с
центром 2 поворота (см. фиг. 1). Ось 27 расположена перпендикулярно к этим осям и параллельно вертикалям. Кроме того, захватная часть 26 или захватное устройство 28 может быть выполнено с возможностью поворота вокруг своей продольной оси.
На фиг. 8 показан схематичный вид второго варианта осуществления доильного станка 3 предлагаемой доильной установки 1. На фиг. 9 показан схематичный вид сверху доильного станка 3, изображенного на фиг. 8.
Отличие этого варианта осуществления от вышеописанного варианта осуществления состоит в том, что пол доильного станка 3 имеет ступеньку 19. Ступенька 19 отделяет поверхность платформы 17 от передней плиты 18 для передних ног, расположенной выше по сравнению с платформой 17. Плита 18 для передних ног обращена к внутреннему пространству IR доильной установки 1. Это означает, что подвергаемое дойке животное своими задними копытами стоит на платформе 17, а передними копытами - на возвышенной плите 18 для передних ног. В ступеньке 19 имеется отверстие, через которое в радиальном направлении 15, в рабочее положение, показанное на фиг. 8, может быть проведена рука-манипулятор 9, чтобы захватить рычажное устройство 6 с доильным аппаратом 5 и переместить его в рабочем положении для установки на вымя животного Т.
Радиальная часть 12 руки-манипулятора 9 имеет прямую форму, при этом она на своем конце через отверстие в ступеньке 19 вводит захватное устройство 28, расположенное на запястье 27. В этом варианте осуществления запястье 27 может поворачиваться вокруг дополнительной поперечной оси или вокруг своей продольной оси (при этом поперечную ось образует ось запястья 27а), чтобы выполнять поворот относительно поперечной оси, обозначенный на фиг. 8. Кроме того, рука-манипулятор 9, например, в каретке 20 может поворачиваться вокруг дополнительной вертикальной оси 33' (см. фиг. 9), для чего предусмотрен соответствующий привод.
Кроме того, на фиг. 8 в целом показано расположение подшипникового узла 10а рычажного механизма 6 над животным Т, например, на радиальном наружном конце горизонтальной распорки 4а опоры 4 направляющей, изображенной на фиг. 4. Здесь показан вертикальный вал 6а, который может поворачиваться в подшипниковом узле 10а вокруг вертикальной оси 33 и направлен с возможностью перемещения вдоль вертикальной оси 33. Разумеется, возможны другие способы установки, например, на платформу 17 или через платформу 17, причем вертикальный вал 6 проходит через платформу 17.
Нижний конец вертикального вала 6а соединен с рычажным механизмом 6, в данном случае с концом верхнего плеча 10. Рычажный механизм 6 может поворачиваться при помощи вертикального вала 6а вокруг вертикальной оси 33. Верхнее плечо 10 соединено с нижним плечом 11 с возможностью поворота вокруг промежуточной оси 34. Доильный аппарат 5 соединен с возможностью поворота вокруг опорной оси 35 на том конце нижнего плеча 11, который расположен напротив поворотного соединения с верхним плечом 10. В этом варианте осуществления доильный аппарат 5 имеет четыре доильных стакана 5а. Каждый из четырех доильных стаканов 5а может устанавливаться индивидуально, независимо от других стаканов.
Кроме того, рука-манипулятор 9 имеет датчик 16 положения, который в данном случае выполнен в виде фотодатчика. Благодаря датчику 16 положения доильный аппарат 5 с рычажным механизмом 6 перемещается при помощи руки-манипулятора 9 из исходного положения в рабочее положение.
В рабочем положении доильный аппарат 5 может принимать различные положения. Например, положение установки служит для того, чтобы позиционировать доильные стаканы 5а так, что каждый из них можно прикрепить к соответствующему соску подвергаемого дойке животного. В процессе доения рычажный механизм 6 поддерживает доильный аппарат 5
так, чтобы вес этого аппарата не затруднял процесс доения. По завершении доения доильные стаканы 5а снова отсоединяются от вымени подвергаемого дойке животного и устанавливаются в исходное положение.
Управление процессами перемещения рук-манипуляторов 9 и позиционирование доильного аппарата 5 осуществляется при помощи управляющего устройства, которое здесь не показано. Управляющее устройство соединено с датчиком 16 положения, а также с соответствующими приводами и датчиками рук-манипуляторов 9.
Параллелограммный механизм доильного аппарата 5 может быть реализован посредством жесткого соединения с промежуточными шарнирами между доильным аппаратом 5 и рычажным механизмом 6 с толкающими штангами. Параллельность может изменяться, например, при помощи соответствующих регулировок.
Изобретение не ограничивается представленными вариантами вариантов осуществления, его можно модифицировать в рамках прилагаемой формулы изобретения.
Направляющая 14 может образовывать, например, полукруг, причем один квадрант этого полукруга содержит руки-манипуляторы 9 для установки в зоне б установки, а другой квадрант, расположенный рядом против часовой стрелки, имеет другие руки-манипуляторы 9 для снятия и возврата рычажных механизмов 6 с доильным аппаратом 5 в исходное положение.
В варианте осуществления датчик 16 положения, например, также может выдавать изображения, отражающие состояние вымени подвергаемого дойке животного и, таким образом, внести вклад в осведомленность относительно состояния здоровья подвергаемого дойке животного.
Каждый доильный станок 3 можно активировать или блокировать отдельно. Доильную установку 1 можно продолжать эксплуатировать даже при заблокированных доильных станках 3, например, не требуется остановка доильной карусели.
Каждый доильный станок 3 можно подготовить для животного индивидуально, например, можно обеспечить заранее фиксированное рабочее положение доильного аппарата 5 с рычажным механизмом 6, причем соответствующие данные предварительного позиционирования предоставляются в зависимости от животного, распознанного устройством распознавания при входе в доильный станок 3, и из банка данных управляющего устройства соответствующей руки-манипулятора 9.
Кроме того, каждый доильный станок 3 может иметь устройство для кормления.
Доильное устройство 1 в виде доильной карусели можно выполнить так, что в случае необходимости для доения определенного животного могут также последовать несколько поворотов на 360°. В этом случае, если животное доходит до выхода 8, предотвращается выход животного из доильного станка 3.
Рычажный механизм 6 может иметь тянущие средства, например, цепи, зубчатые ремни и т.п., например, в верхнем плече 10 и в нижнем плече 11, или, например, в комбинации с толкающими штангами, которые обеспечивают параллелограммный механизм и амортизацию перемещения.
Подразумевается, что доильный аппарат можно также использовать для дойных животных, имеющих вымя с различным числом сосков, например, 2, 3 или 4.
Доильная установка 1 может, например, иметь несколько расположенных рядом друг с другом доильных станков 3. При этом направляющая 14 не имеет форму круга, а согласована с расположением доильных станков 3, например, имеет прямолинейную форму.
В варианте, показанном на фиг. 8 и 9, рука-манипулятор 9 может позиционироваться как сбоку животного Т, через отверстие, так и под передними копытами, на продольной оси животного Т, т.е. радиальное направление 15 руки-манипулятора 9 проходит посредине под животным, при этом доильный аппарат 5 перемещается слева или справа от животного Т, из соответствующей боковой области между передними и задними ногами животного Т, и устанавливается под вымя посредине животного Т. При этом рука-манипулятор 9 находится вне поля зрения животного Т.
Рычажное устройство 6 с доильным аппаратом 5 может иметь дополнительную защиту от перегрузки, например, посредством параллелограммного механизма с ремнями, который может обладать податливостью к ударам животного Т.
Кроме того, полуавтоматическая установка доильного аппарата 5 может произойти в результате того, что простое исполнительное устройство (на чертеже не показано), установленное на перегородке 40, например, содержащее цепи или тросы, предварительно позиционирует доильный аппарат 5, например, без датчика 16 положения, в положение под вымя подвергаемого дойке животного, причем установку доильных стаканов 5а осуществляет дояр. Благодаря этому усилия дояра необходимы только для прикладывания доильных стаканов 5а, а не для позиционирования и подъема всего доильного аппарата 5.
Ссылочные обозначения
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2587561C2 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2587563C9 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2590818C2 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2742310C2 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ ДОИЛЬНОЙ УСТАНОВКИ АВТОМАТИЧЕСКОГО ДОЕНИЯ ДОЙНЫХ ЖИВОТНЫХ, ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2018 |
|
RU2753879C2 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ ДОИЛЬНОЙ УСТАНОВКИ ДЛЯ АВТОМАТИЧЕСКОГО ДОЕНИЯ ДОЙНЫХ ЖИВОТНЫХ, ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2015 |
|
RU2650392C9 |
| Манипулятор доильной установки с управляемым режимом доения по четвертям вымени коровы | 2019 |
|
RU2715859C1 |
| УСТАНОВКА ДОИЛЬНАЯ ВЫДВИЖНАЯ | 2002 |
|
RU2234835C1 |
| Автоматизированная доильная установка | 1990 |
|
SU1777728A1 |
| Передвижной загон для пастьбы животных | 1982 |
|
SU1110423A1 |
Доильная установка, в частности доильная карусель, содержит по меньшей мере, один доильный станок для доения дойных животных, внутреннее роботизированное устройство, имеющее, по меньшей мере, одну руку-манипулятор. Указанный, по меньшей мере, один доильный станок имеет две продольные стороны и две узкие стороны, а именно переднюю узкую сторону и заднюю узкую сторону, из которых одна узкая сторона соответствует, в качестве передней узкой стороны, передней стороне подвергаемого дойке дойного животного, и рычажный механизм с доильным аппаратом, выполненный с возможностью перемещения из исходного положения в рабочее положение и обратно. Указанная, по меньшей мере, одна рука-манипулятор расположена, для перемещения рычажного механизма, на передней узкой стороне указанного, по меньшей мере, одного доильного станка доильной установки, которая соответствует передней стороне подвергаемых дойке животных. Использование заявленного изобретения позволяет уменьшить затраты на эксплуатацию и техническое обслуживание. 25 з.п. ф-лы, 11 ил.
1. Доильная установка (1), в частности доильная карусель, содержащая по меньшей мере один доильный станок (3) для доения дойных животных (Т), внутреннее роботизированное устройство, имеющее по меньшей мере одну руку-манипулятор (9), причем указанный по меньшей мере один доильный станок (3) имеет две продольные стороны и две узкие стороны, а именно переднюю узкую сторону и заднюю узкую сторону, из которых одна узкая сторона соответствует, в качестве передней узкой стороны, передней стороне подвергаемого дойке дойного животного (Т), и рычажный механизм (6) с доильным аппаратом (5), выполненный с возможностью перемещения из исходного положения в рабочее положение и обратно, отличающаяся тем, что указанная по меньшей мере одна рука-манипулятор (9) расположена, для перемещения рычажного механизма (6), на передней узкой стороне указанного по меньшей мере одного доильного станка (3) доильной установки (1), которая соответствует передней стороне подвергаемых дойке животных (Т).
2. Доильная установка (1) по п. 1, отличающаяся тем, что в исходном положении рычажный механизм (6) с доильным аппаратом (5) расположен вдоль одной из продольных сторон доильного станка (3), сбоку от подвергаемого дойке животного (Т).
3. Доильная установка (1) по п. 1, отличающаяся тем, что указанная по меньшей мере одна рука-манипулятор (9) предназначена для перемещения рычажного механизма (6) в автоматическом режиме из исходного положения в рабочем положении в положение установки для автоматической установки доильного аппарата (5) на соски подвергаемого дойке животного (Т).
4. Доильная установка (1) по п. 1, отличающаяся тем, что указанная по меньшей мере одна рука-манипулятор (9) выполнена с возможностью перемещения и направления по направляющей (14), в частности, в зоне (α) установки.
5. Доильная установка (1) по п. 4, отличающаяся тем, что несколько рук-манипуляторов (9) выполнены с возможностью перемещения и направления на платформе по направляющей (14).
6. Доильная установка (1) по п. 4, отличающаяся тем, что в доильной установке (1), выполненной в виде доильной карусели, направляющая (14) расположена концентрически относительно центра (2) поворота доильной карусели, а в доильной установке (1), выполненной в виде линейной доильной установки (1), направляющая (14) расположена параллельно доильной карусели (1).
7. Доильная установка (1) по п. 4, отличающаяся тем, что направляющая (14) закреплена на доильной установке (1).
8. Доильная установка по п. 4, отличающаяся тем, что указанная по меньшей мере одна рука-манипулятор (9) внутреннего роботизированного устройства выполнена с возможностью перемещения по направляющей (14) синхронно с перемещением доильной установки (1) и независимо от перемещения доильной установки (1).
9. Доильная установка (1) по п. 1, отличающаяся тем, что указанная по меньшей мере одна рука-манипулятор (9) выполнена с возможностью перемещения в радиальном направлении (15) для перемещения доильного аппарата (5) из исходного положения в рабочее положение и обратно.
10. Доильная установка (1) по п. 9, отличающаяся тем, что указанный по меньшей мере один доильный станок (3) имеет вышерасположенную часть, отделенную ступенькой (19) от поверхности платформы (17) доильного станка (3) и имеющую плиту (18) для передних ног.
11. Доильная установка (1) по п. 9, отличающаяся тем, что указанная по меньшей мере одна рука-манипулятор (9) выполнена с возможностью перемещения в радиальном направлении (15), сбоку и параллельно или по существу приблизительно параллельно продольной оси подвергаемого дойке животного (Т).
12. Доильная установка (1) по п. 10, отличающаяся тем, что указанная по меньшей мере одна рука-манипулятор (9) выполнена с возможностью перемещения в радиальном направлении (15), через отверстие в ступеньке (19), вдоль продольной оси подвергаемого дойке животного (Т).
13. Доильная установка (1) по п. 1, отличающаяся тем, что в исходном положении рычажный механизм (6) с доильным аппаратом (5) расположен в перегородке (40), расположенной на продольной стороне доильного станка (3), или в области на продольной оси перегородки (40), и выполнен с возможностью перемещения в рабочее положение в боковом направлении, к подвергаемому дойке животному (Т).
14. Доильная установка (1) по п. 1, отличающаяся тем, что рычажный механизм (6) имеет верхнее плечо (10) и соединенное с ним с возможностью поворота нижнее плечо (11).
15. Доильная установка (1) по п. 13, отличающаяся тем, что рычажный механизм (6) установлен посредством подшипникового узла (10а) с возможностью поворота и направления в вертикальном направлении.
16. Доильная установка (1) по п. 15, отличающаяся тем, что подшипниковый узел (10а) расположен над подвергаемым дойке животным (Т), под платформой (17) указанного по меньшей мере одного доильного станка (3) или на платформе (17) указанного по меньшей мере одного доильного станка (3).
17. Доильная установка (1) по п. 13, отличающаяся тем, что в исходном положении рычажный механизм (6) с доильным аппаратом (5) расположен в перегородке (40), в отверстии кожуха перегородки (40).
18. Доильная установка (1) по п. 17, отличающаяся тем, что отверстие в кожухе перегородки (40) вместе с расположенным в нем в исходном положении рычажным механизмом с доильным аппаратом выполнено с возможностью закрытия его предохранительной крышкой.
19. Доильная установка (1) по п. 13, отличающаяся тем, что в перегородке (40) или в области исходного положения рычажного устройства (6) с доильным аппаратом (5) расположено устройство для очистки доильного аппарата (5).
20. Доильная установка (1) по п. 1, отличающаяся тем, что рычажный механизм (6) с доильным аппаратом (5) имеет защиту от перегрузки.
21. Доильная установка (1) по п. 1, отличающаяся тем, что рычажный механизм (6) имеет параллелограммный механизм для доильного аппарата (5).
22. Доильная установка (1) по п. 21, отличающаяся тем, что параллелограммный механизм содержит толкающие штанги и/или тянущие средства.
23. Доильная установка (1) по п. 22, отличающаяся тем, что тянущие средства представляют собой ремни.
24. Доильная установка (1) по п. 23, отличающаяся тем, что тянущие средства образуют защиту от перегрузки или поддержку защиты от перегрузки.
25. Доильная установка (1) по п. 1, отличающаяся тем, что рука-манипулятор (9) имеет по меньшей мере один датчик (16) положения.
26. Доильная установка (1) по любому из п.п. 1-25, отличающаяся тем, что в полуавтоматическом режиме рычажный механизм (6) выполнен с возможностью перемещения при помощи простого исполнительного устройства из исходного положения в рабочее положение, причем рабочее положение представляет собой фиксированное предварительное положение, предварительно заданное стопорным средством, причем доильный аппарат (5) в предварительном положении находится в удобном для дояра положении.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| WO2011098994A3, 18.08.2011 | |||
| EP 2060170A1,20.05.2009 | |||
| Автоматизированная доильная установка | 1990 |
|
SU1777728A1 |

