Данное изобретение относится к перегородке доильной установки по ограничительной части п. 1 формулы изобретения. Кроме того, изобретение относится к доильной установке.
Такую доильную установку применяют для машинного доения дойных животных. Дойными животными, например, являются коровы, козы, овцы и т.д. Доильная установка содержит доильные станки, разделенные перегородками. Процесс дойки могут автоматизировать при помощи так называемых доильных роботов. Например, применяют доильные карусели.
Под термином “доильная установка” подразумевают установки из доильных станков, причем угловое положение подлежащего дойке животного или угловое положение воображаемой продольной оси подлежащего дойке животного в доильном станке относительно начала отсчета или базовой линии составляет от 0 до 90°. В качестве начала отсчета, например, применяют траншею, являющуюся местом пребывания персонала молочной фермы. В качестве базовой линии, например, применяют продольную сторону прямолинейной траншеи или касательную к круговой траншее.
Доильные установки представляют собой, например, подвижные и стационарные доильные установки. Подвижными доильными установками, например, являются доильные карусели с доением снаружи или изнутри, причем в обоих случаях поворот возможен в любом направлении. Так называемые доильные установки с параллельным расположением станков могут быть выполнены также в виде подвижных доильных установок. Кроме того, групповые доильные установки также могут быть стационарными, например, типа "елочка" или "тандем". Это перечисление дано только в качестве примера и не является ограничительным.
В патентном документе ЕР 1 084 611 В1 описывается конструкция с механической рукой, содержащая поворотное поддерживающее устройство для доильного аппарата. Эта конструкция может перемещаться на одной или нескольких направляющих вдоль одного или нескольких доильных боксов.
Из-за незначительной производительности современная техника автоматизации для больших установок, если и подходит, то только с ограничениями. Все более повышающиеся требования, в особенности, в отношении высоких показателей производительности и непрерывной эксплуатации, требуют, чтобы современные доильные роботы, которые являются сложными и дорогими, могли применяться совместно, на нескольких доильных площадках. Это может иметь отрицательные последствия, в том числе из-за большой сложности и связанной с ней высокой вероятностью отказа, периодического режима работы, недоступных для персонала участков (техника безопасности на роботизированных участках).
На этом фоне задача данного изобретения заключается в создании усовершенствованной установки и доильного станка, а также в увеличении возможной производительности установки.
Эта задача решается при помощи перегородки с признаками пункта 1 и доильной установки с признаками пункта 15.
Перегородка доильной установки согласно изобретению для по меньшей мере одного доильного станка для доения дойных животных, расположенная приблизительно параллельно продольной оси подлежащего дойке животного, содержит рычажный механизм с доильным аппаратом, перемещаемый из исходного положения в рабочее положение и обратно. При этом в исходном положении рычажный механизм с доильным аппаратом расположен в перегородке и может в автоматическом или полуавтоматическом режиме перемещаться в боковом направлении, к подлежащему дойке животному, в
рабочее положение между его передними и задними ногами.
Еще одна предлагаемая перегородка доильной установки для по меньшей мере одного доильного станка для доения дойных животных расположена с продольной стороны доильного станка и содержит рычажный механизм с доильным аппаратом, перемещаемый из исходного положения в рабочее положение и обратно. В исходном положении этот рычажный механизм с доильным аппаратом расположен в перегородке и может в автоматическом или полуавтоматическом режиме перемещаться в боковом направлении к подлежащему дойке животному, в рабочее положение между его передними и задними ногами.
В доильной установке с расположенными рядом друг с другом прямоугольными доильными станками, каждый из которых имеет параллельные продольные стороны, как это имеет место, например, в доильной установке с параллельным расположением станков, перегородка расположена параллельно воображаемой продольной оси подлежащего дойке животного. При этом для упрощения предполагается, что во время доения подлежащее дойке животное со своей воображаемой продольной осью спокойно стоит в идеальном состоянии.
В случае доильной установки с расположенными по кругу станками, например, в доильной карусели, продольные стороны доильных станков не параллельны. В этом случае продольные стороны представляют собой отрезки радиусов круга доильной карусели и пересекаются в воображаемом удлинении в центре этого круга или в центре поворота карусели, причем они образуют центральный угол. Воображаемая продольная ось подлежащего дойке животного в идеальном случае проходит также через центр поворота и делит этот центральный угол пополам. Ниже этот случай для краткости обозначается, как "приблизительно параллельно".
Подлежащее дойке животное может войти в оборудованный перегородкой доильный станок, не соприкасаясь с рычажным механизмом. Только в том случае, если животное уже стоит в доильном станке, доильный аппарат перемещается сбоку в рабочее положение, под животное. В одном варианте осуществления перегородка устроена так, что потребности в дополнительной площади не возникает. Благодаря этому получается преимущество, заключающееся в том, что животные могут по-прежнему стоять брюхо к брюху. Это дает дополнительные преимущества. Во-первых, таким образом на минимально возможной площади можно доить большое количество животных, в результате можно сохранить на низком уровне затраты на доильную установку и соответствующее здание. Во-вторых, сокращаются расстояния, проходимые персоналом молочной фермы и животными и, т.е. экономится время.
При перемещении рычажного механизма с доильным аппаратом сбоку, между передними и задними ногами, под вымя животного аппарат перемещается вне области между задними ногами. В области между задними ногами существует очень высокая опасность загрязнения экскрементами животного. Поэтому этой области избегают, что значительно уменьшает загрязнение доильного аппарата и рычажного механизма. Кроме того, в результате сокращается время чистки и, следовательно, затраты.
Еще одно преимущество этой компактной конструкции состоит в том, что оснащение существующих установок перегородкой возможно без потерь доильных станков/площадок.
Персонал может вмешиваться в процесс дойки в любой момент и без помех со стороны устройств, т.е. поддерживающего рычажного механизма и вспомогательного оборудования, при этом ему обеспечивается легкий доступ. Дополнительные защитные приспособления не требуются. Если доильная установка представляет собой доильную карусель, то она может продолжать поворачиваться непрерывно, так как персонал молочной фермы может осуществить вмешательство снаружи в любом месте. Опасность для персонала существенно снижается.
В одном из вариантов осуществления в автоматическом режиме рычажный механизм может перемещаться из исходного положения в рабочем положении в положение установки для автоматической установки доильного аппарата на соски подлежащего дойке животного, причем доильный аппарат имеет по меньшей мере один датчик положения. При этом рычажный механизм перемещает доильный аппарат под вымя подлежащего дойке животного, а доильные стаканы автоматически устанавливаются на соски при помощи датчика положения для обнаружения сосков, рычажного механизма и узла привода. Этот режим также обозначается как автоматический режим.
При этом каждый доильный стакан может позиционироваться отдельно.
Альтернативно в другом варианте осуществления предусмотрено, что в полуавтоматическом режиме рычажный механизм может перемещаться из исходного положения в рабочее положение, причем рабочее положение представляет собой фиксированное предварительное положение, предварительно задаваемое упорными средствами, при этом доильный аппарат в предварительном положении находится в удобном для дояра и роботизированного устройства положении. При этом доильный аппарат при помощи простых и регулируемых средств привода, имеющих регулируемые упоры, например, при помощи пневмоцилиндров, перемещается в фиксированное предварительное положение, удобное для персонала молочной фермы или роботизированного устройства, под вымя подлежащего дойке животного. После этого дояр, стоящий позади животного, может просто, без затруднений взять в руки доильные стаканы и установить их на соски. Сразу после установки на сосок первого стакана это распознается, например, при помощи пневматического датчика давления, и доильный аппарат освобождается из фиксированного предварительного положения в свободное горизонтальное положение. В вертикальном положении доильный аппарат, как и при автоматической установке, остается в положении висения. Таким образом, обеспечивается то, что, как и при автоматической установке, доильный аппарат после процесса установки следует за перемещениями подлежащего дойке животного.
Данное предварительное позиционирование доильного аппарата при помощи рычажного механизма во время этого так называемого полуавтоматического доения происходит так, что для установки доильных стаканов на соски дояру необходимо лишь незначительно перемещать стаканы, при этом ему почти не приходится затрачивать никаких усилий. Это экономит усилия и время. Так как в этом варианте осуществления для регулирования всех положений сосков не требуется ни датчик положения, ни приводной механизм, а необходим только простой привод, этот вариант предпочтительным образом может потребовать меньших затрат. Еще одно преимущество заключается в том, что этот полуавтоматический вариант осуществления можно модернизировать до автоматического варианта. Это оказывается возможным ввиду одинаковости большинства компонентов.
В варианте осуществления доильные стаканы доильного аппарата в исходном положении и в предварительном положении удерживаются вертикально и вплотную друг к другу над коллектором, на некотором расстоянии от коллектора, причем доильные стаканы доильного аппарата могут ограниченно разъединяться из предварительного положения в положение доения, в котором доильные стаканы доильного аппарата могут ограниченно перемещаться, так что в положении доения указанное расстояние между доильными стаканами доильного аппарата и коллектором увеличено, а затем снова перемещаться назад, в предварительное положение. Таким образом, в предварительном положении доильные стаканы находятся вплотную друг к другу в так называемом положении подачи для несложного и быстрого вмешательства со стороны дояра или робота. При этом дояр или робот может взять сразу все доильные стаканы.
В данном случае указанное расстояние между каждым доильным стаканом в исходном и предварительном положении и коллектором определено соответственно по меньшей мере одним сегментным элементом, расположенным между доильным стаканом и коллектором. При этом является предпочтительным, если в по меньшей мере одном сегментном элементе имеется канал, через который проведено по меньшей мере одно тянущее средство, которое на одном конце закреплено на соответствующем доильном стакане, а на другом конце шарнирно соединено с исполнительным устройством. Такое тянущее средство можно интегрировать без труда и не занимая много места.
В еще одном варианте осуществления указанное по меньшей мере одно тянущее средство в исходном положении и в предварительном положении может быть натянуто при помощи исполнительного устройства, причем в исходном и предварительном положении соответствующий доильный стакан доильного аппарата удерживается в вертикальном положении над коллектором, на указанном расстоянии от коллектора. При этом является предпочтительным, чтобы тянущее средство представляло собой, например, легко натягивающийся трос или легко натягивающуюся цепь.
В другом варианте осуществления коллектор закреплен на держателе доильного аппарата, в соединении между коллектором и держателем доильного аппарата, причем в исходном положении и в предварительном положении это соединение прочно удерживается вместе, а в положении доения ослабляется. При этом, кроме того, в положении доения коллектор предпочтительно ослаблен настолько, что он может перемещаться в определенных пределах относительно держателя доильного аппарата. Преимущество этого варианта осуществления состоит в том, что при помощи небольшого хода исполнительного устройства, который может составлять, например, 15...20 мм, можно получить не только максимальную свободу перемещения доильных стаканов в положении доения, но и подвижность коллектора относительно держателя доильного аппарата, ограниченную, например, направляющим пазом, например, можно облегчить установку доильных стаканов, в особенности в случае так называемого ступенчатого вымени.
В одном из вариантов осуществления исполнительное устройство представляет собой пневмоцилиндр, гидроцилиндр или электрический привод.
Рычажный механизм имеет верхнее плечо и соединенное с ним с возможностью поворота нижнее плечо. Это дает складную конструкцию, которая в исходном положении расположена и защищена в перегородке.
В другом варианте осуществления нижнее плечо можно выполнить в виде держателя доильного аппарата с доильным аппаратом. В результате получают простую и компактную конструкцию, в частности для полуавтоматического варианта осуществления.
В одном из вариантов осуществления рычажный механизм соединен с узлом привода, расположенным на перегородке, за пределами досягаемости или выше подлежащего дойке животного. Тем не менее, узел привода также может быть расположен под доильной платформой. В результате в перегородке могут быть расположены все элементы привода и управления.
В дополнительном варианте осуществления приводное устройство имеет по меньшей мере один серводвигатель. По меньшей мере один серводвигатель может быть соединен с соответствующим редуктором. В еще одном дополнительном варианте осуществления приводное устройство имеет по меньшей мере один непосредственный привод.
Если узел привода имеет по меньшей мере один моментный двигатель, то получается определенная эластичность. Благодаря этому возможна поддержка защиты от перегрузки рычажного механизма, например, от ударов подлежащего дойке животного. Так как моментные двигатели не нуждаются в редукторе, при ударах рычажный механизм может в определенной мере обеспечивать податливость назад. Уменьшаются повреждения и травмы - как рычажного механизма, так и животного. Моментные двигатели могут обеспечивать податливость при манипуляциях с рычажным механизмом, например, из-за прикосновения ног животного. Кроме того, возможно аварийное доение, когда дояру в обесточенном состоянии необходимо подвести доильный аппарат, так как при этом не нужно преодолевать сопротивление редуктора и двигателя. Хотя в отношении привода моментные двигатели обесточены, их датчики углового положения могут быть включены, в результате всегда имеются данные об их положении и положении рычажного механизма вместе с доильным аппаратом.
Конечно, можно применять и другие приводные механизмы, например, пневмоцилиндры.
Еще одно преимущество заключается в том, что сразу же после установки всех доильных стаканов на соски двигатели можно обесточить. Кроме того, достигается легкости хода рычажного механизма, в результате доильный аппарат может следовать за перемещениями животного. Благодаря этому соски вымени животного не подвергаются негативному рычажному воздействию.
Еще одно преимущество при этом так называемом пассивном слежении по сравнению с активным слежением при помощи узла привода заключается в большой экономии энергии, так как энергия требуется только для установки доильного аппарата. Это может составлять, например, приблизительно лишь 5 % времени доения животного.
В еще одном варианте осуществления рычажный механизм с доильным аппаратом в исходном положении расположен в перегородке, в отверстии облицовки перегородки (4). Это дает компактную, узкую конструкцию.
В альтернативном варианте в исходном положении рычажный механизм с доильным аппаратом может быть расположен в той части перегородки, которая расположена под доильным станком. При этом эта часть перегородки может проходить через доильную платформу или вокруг ее края. Для этого в доильной платформе также может иметься соответствующая выемка.
Кроме того, отверстие в облицовке перегородки вместе с расположенным в нем в исходном положении рычажным механизмом с доильным аппаратом может закрываться предохранительной крышкой. Благодаря этому можно снизить опасность травмирования животных, особенно беспокойных животных.
В еще одном варианте осуществления в перегородке может быть расположено устройство для очистки доильного аппарата. Термин "устройство для очистки" следует также понимать так, что возможна внутренняя чистка доильных стаканов и наружная чистка. Естественно, также возможна дезинфекция перед доением и после доения. Кроме того, возможна промежуточная чистка доильного аппарата. В результате компактную конструкцию совершенствуют дополнительными функциями. Затраты времени на очистку уменьшаются, т.е. перемещения к местам чистки отпадают, так как очистку можно осуществлять на месте.
Кроме того, на доильном аппарате может иметься устройство для обработки сосков, дезинфицирующее соски перед доением и после доения.
В другом варианте осуществления рычажный механизм может иметь параллелограммный механизм для доильного аппарата. Если параллелограммный механизм имеет толкающие и/или соединительные штанги, или образован из элементов привода параллелограммного механизма, то для параллелограммного механизма не требуется ни измерительная система, ни система привода. Особенно предпочтительна тонкая и компактная конструкция, когда параллелограммный механизм расположен внутри плеч рычажного механизма. Кроме того, не требуются дополнительные защитные приспособления.
В другом варианте осуществления элементами параллелограммного механизма могут быть тянущие средства, например, ремни. Они могут поддерживать защиту от перегрузки.
В еще одном варианте осуществления рычажный механизм имеет по меньшей мере один привод с тянущим средством. Ремни, применяемые в качестве тянущего средства, почти не создают шума. Для точного позиционирования предпочтительно применение зубчатых ремней.
В еще одном дополнительном варианте осуществления перегородка вместе со своими функциональными узлами и компонентами образует предварительно собранный узел в комплекте. Благодаря этому можно без труда осуществить быстрый монтаж и демонтаж, а также модернизацию существующих доильных установок. Функциональными узлами и компонентами перегородки являются рычажный механизм и доильный аппарат. Дополнительными функциональными узлами и компонентами могут быть узел привода (узлы привода), устройство для очистки, предохранительная крышка и т.д.
Вышеописанной перегородкой может быть оборудована доильная установка для доения дойных животных.
Альтернативная доильная установка, содержащая по меньшей мере один доильный станок для доения дойных животных и по меньшей мере одну перегородку, причем перегородка расположена приблизительно параллельно продольной оси подлежащего дойке животного, содержащую рычажный механизм с доильным аппаратом, перемещаемый из исходного положения в рабочее положение и обратно, выполнена так, что рычажный механизм с доильным аппаратом в исходном положении расположен под доильной платформой и может перемещаться в рабочее положение позади подлежащего дойке животного, между или за его задними ногами.
Еще один вариант осуществления доильной установки, содержащей по меньшей мере один доильный станок для доения дойных животных и по меньшей мере одну перегородку, выполнен так, что перегородка расположена с продольной стороны доильного станка. Этот вариант осуществления содержит рычажный механизм с доильным аппаратом, перемещаемый из исходного положения в рабочее положение и обратно. В исходном положении этот рычажный механизм с доильным аппаратом расположен под доильной платформой и может перемещаться в рабочее положение позади подлежащего дойке животного, между или за его задними ногами.
Таким образом, становится возможной еще более узкая конструкция перегородки.
Выражение "за его задними ногами" следует понимать так, что при этом подразумевают не область под животным, т.е. под его брюхом между задними и передними ногами, а область позади животного.
В еще одном варианте осуществления в полуавтоматическом режиме рычажный механизм может перемещаться из исходного положения в рабочее положение, причем рабочее положение представляет собой фиксированное предварительное положение, предварительно задаваемое упорными средствами, причем в предварительном положении доильный аппарат находится в удобном для дояра или роботизированного устройства положении. Таким образом, при одинаковом устройстве процесс установки может осуществить как дояр, так и роботизированное устройство, в результате повышается универсальность.
Если рычажный механизм может поворачиваться вокруг горизонтальной оси из исходного положения в рабочее положение и обратно, то область над доильной платформой во время перемещения животных может оставаться совершенно свободной. К тому же животное не может видеть рычажный механизм.
В еще одном варианте осуществления предусмотрено, что соединенный с рычажным механизмом доильный аппарат в исходном положении рычажного механизма может вводиться в контакт с устройством для очистки, в результате экономится место и сокращаются процессы перемещения.
В еще одном варианте осуществления предусмотрено, что соединенный с рычажным механизмом доильный аппарат в исходном положении расположен вверх дном. В результате получают упрощенную и компактную конструкцию.
Кроме того, в перегородке может быть расположен по меньшей мере один узел привода рычажного механизма.
В другом варианте осуществления предусмотрено наличие по меньшей мере одного роботизированного устройства, предназначенного для установки доильного аппарата из рабочего положения в предварительное положение на соски вымени подлежащего дойке животного. Относительно животного роботизированное устройство может захватывать и устанавливать находящийся в предварительном положении доильный аппарат спереди через ноги, сбоку, снизу или сзади. Это дает универсальность применения.
Доильная установка может представлять собой доильную карусель. Доильная карусель может быть выполнена в виде доильной карусели с доением снаружи.
Предпочтительные дополнительные варианты осуществления доильного аппарата и доильного станка являются предметом соответствующих пунктов формулы изобретения.
Дополнительные преимущества и подробности следуют из варианта осуществления, показанного на чертежах. На чертежах показано следующее.
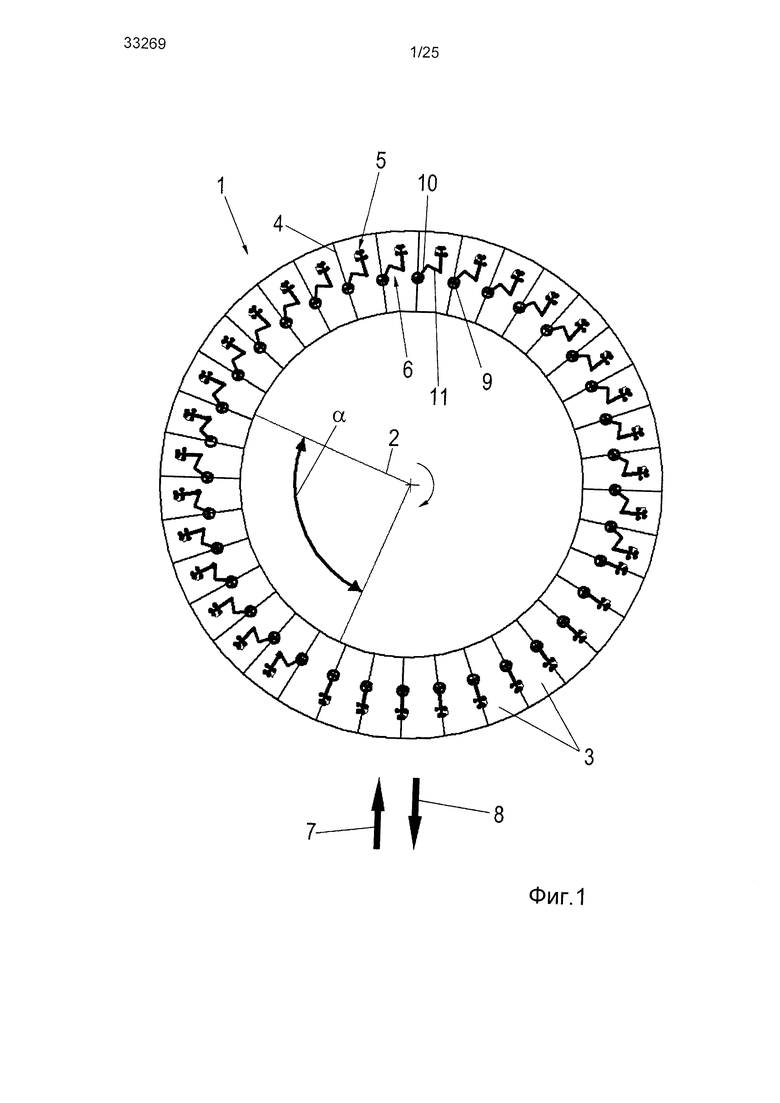
Фиг. 1. Схематичный вид сверху первого варианта осуществления предлагаемой доильной установки, содержащей предлагаемые перегородки, выполненные в соответствии с первым вариантом осуществления.
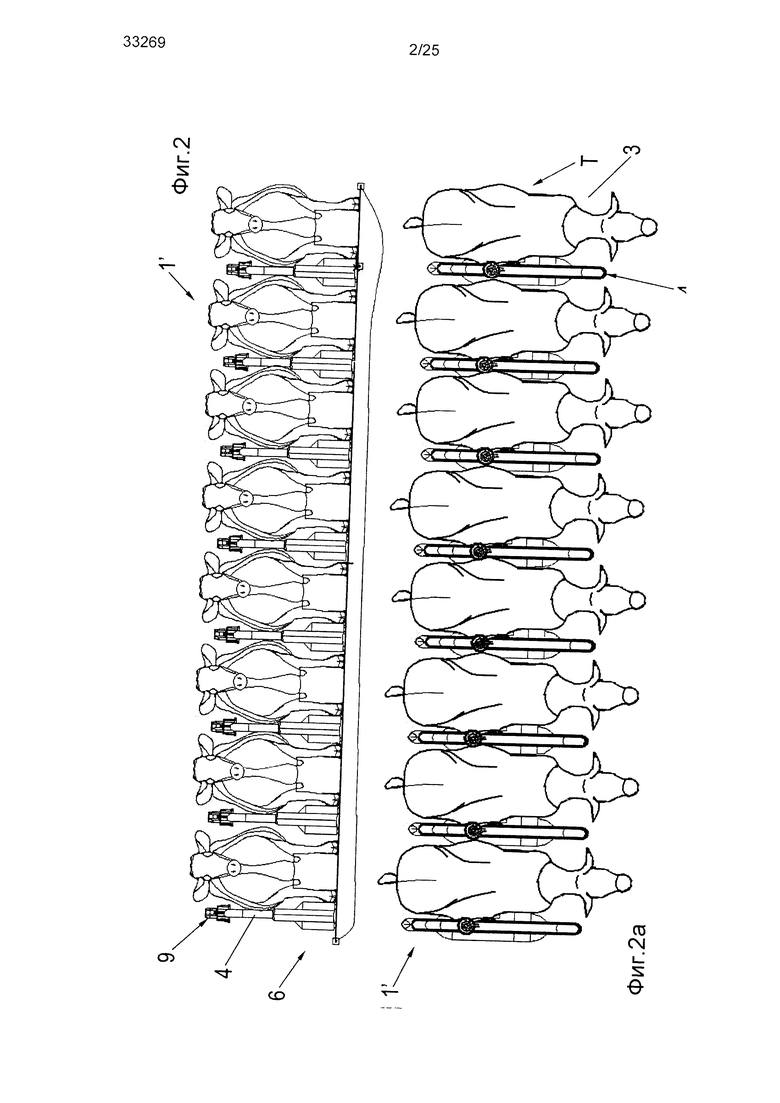
Фиг. 2 и 2а. Схематичные изображения второго варианта осуществления предлагаемой доильной установки, содержащей предлагаемые перегородки.
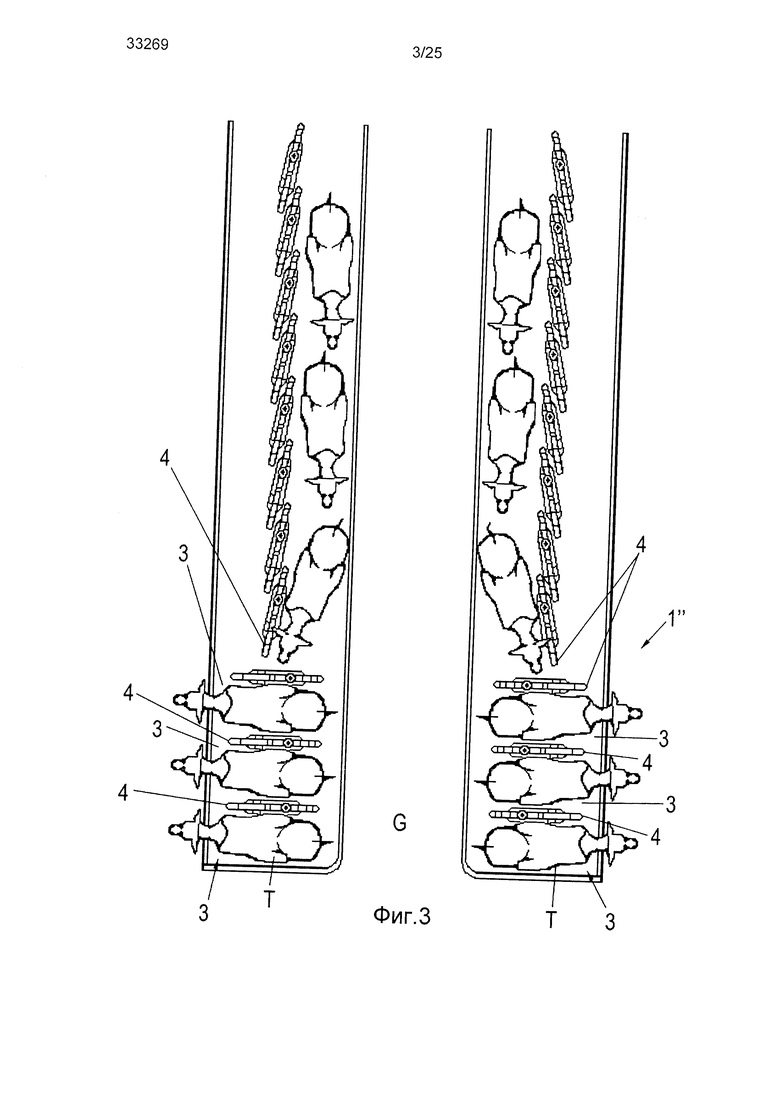
Фиг. 3. Схематичный вид сверху третьего варианта осуществления предлагаемой доильной установки, содержащей предлагаемые перегородки.
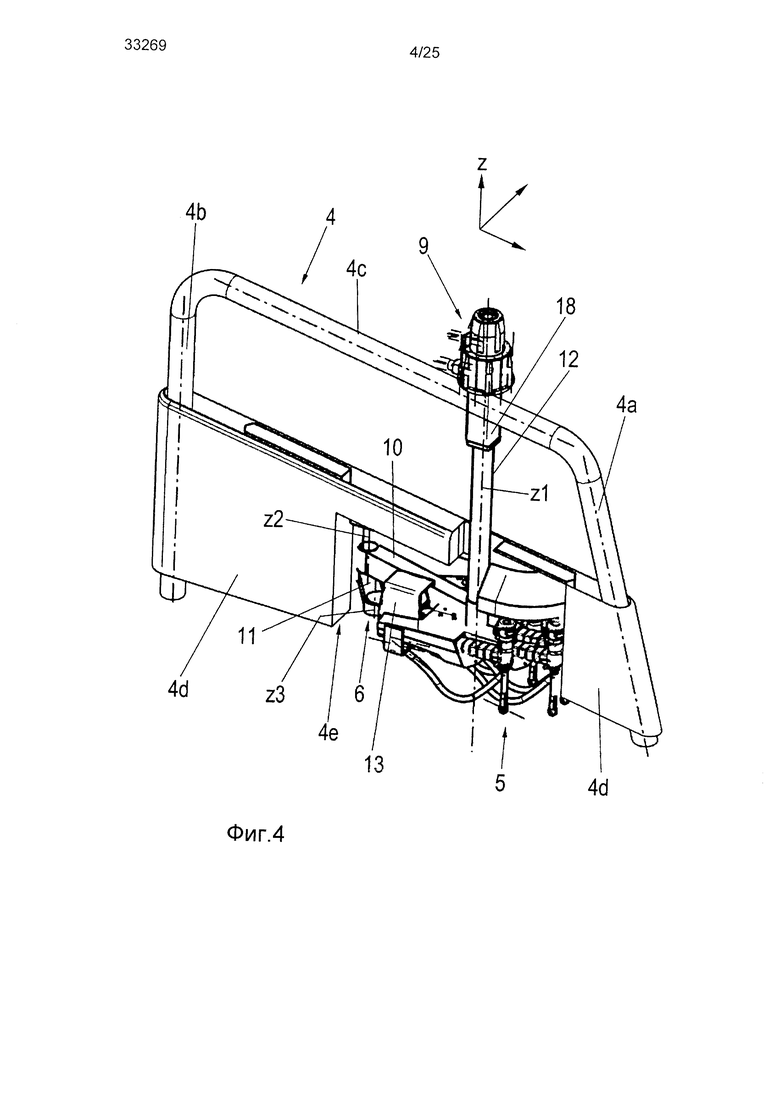
Фиг. 4. Схематичное изображение в аксонометрии предлагаемой перегородки с рычажным механизмом в исходном положении.
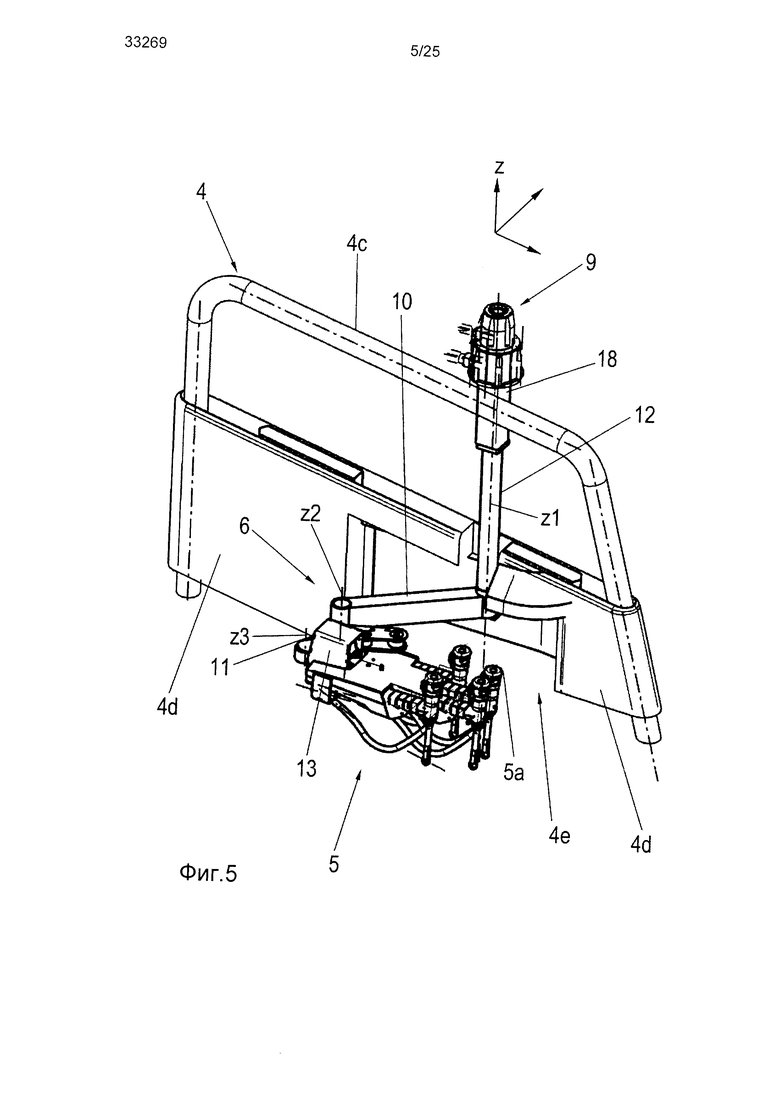
Фиг. 5. Изображение в аксонометрии, соответствующее фиг. 4, с рычажным механизмом в рабочем положении.
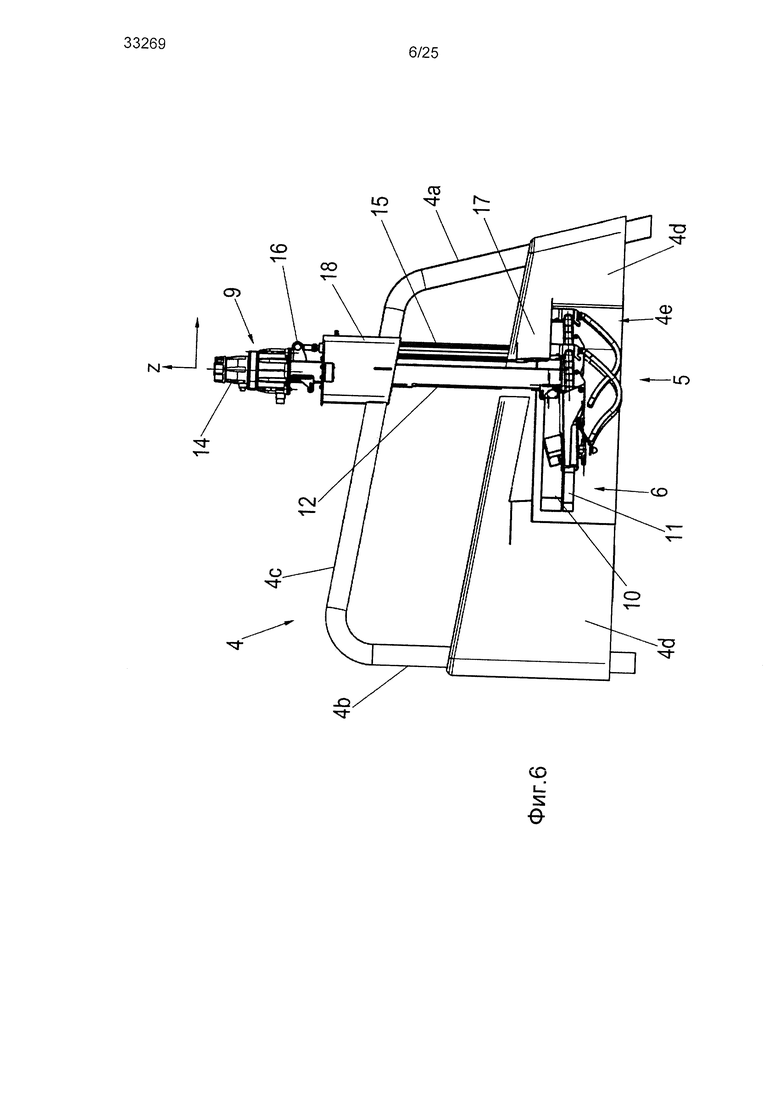
Фиг. 6. Вид сбоку предлагаемой перегородки.
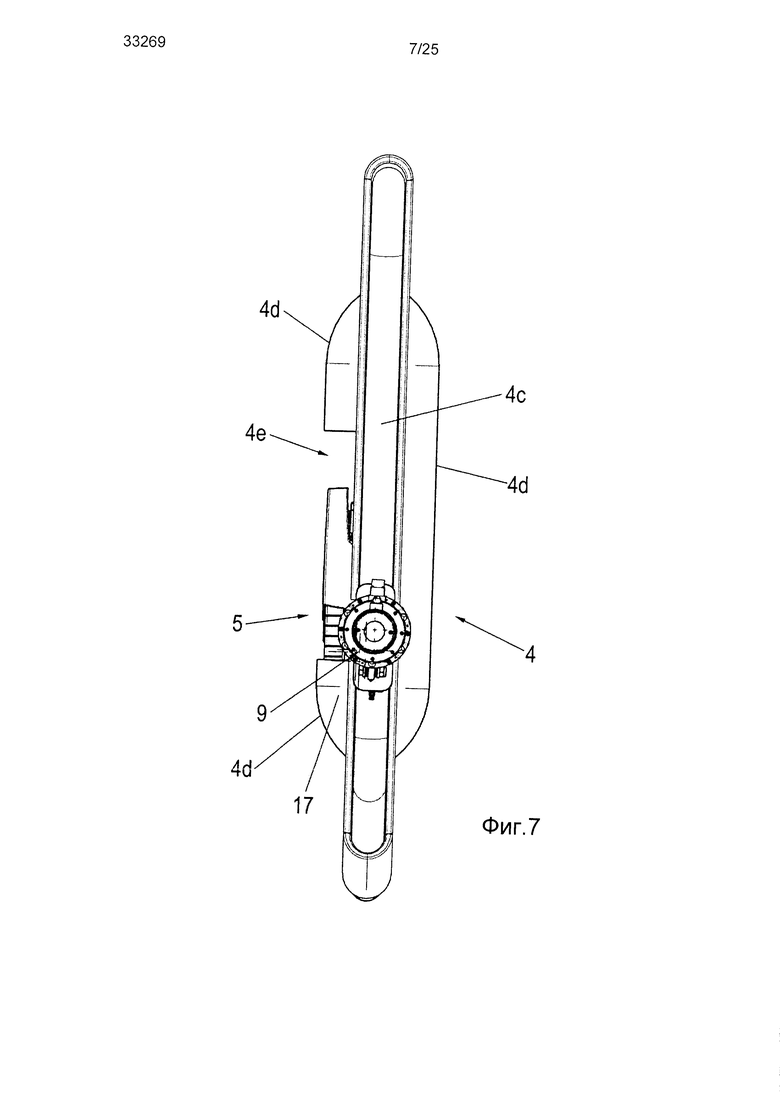
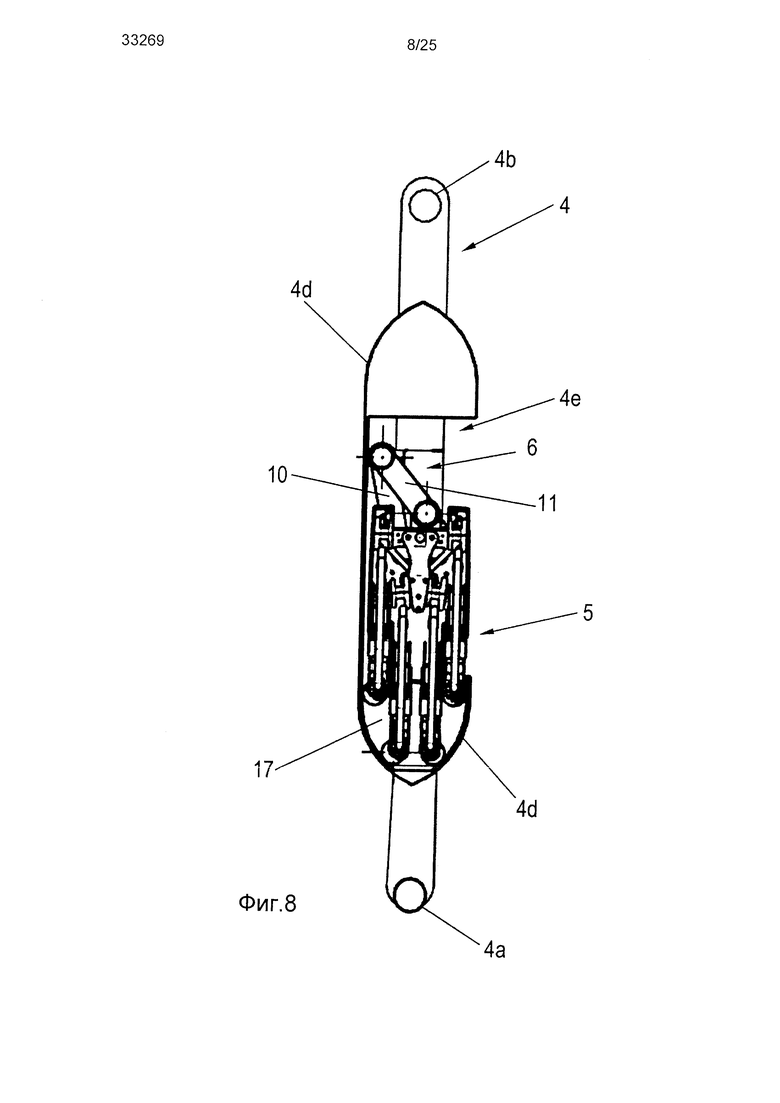
Фиг. 7 и 8. Вид сверху и вид снизу предлагаемой перегородки с рычажным механизмом в исходном положении.
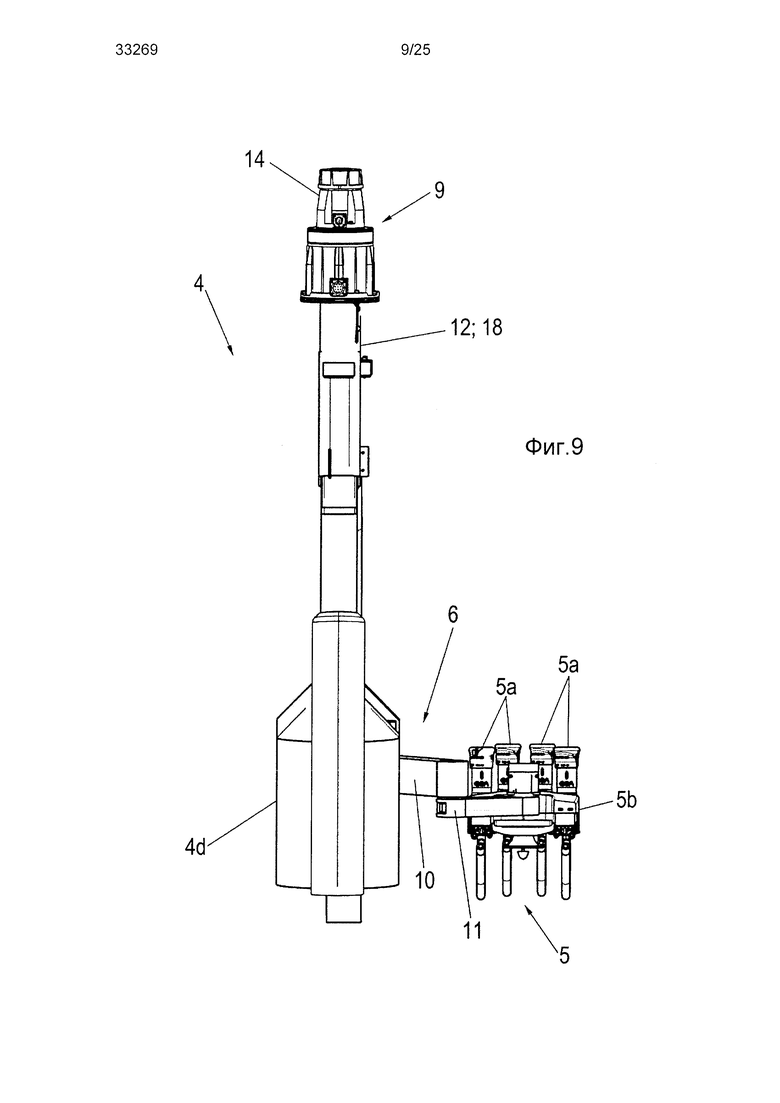
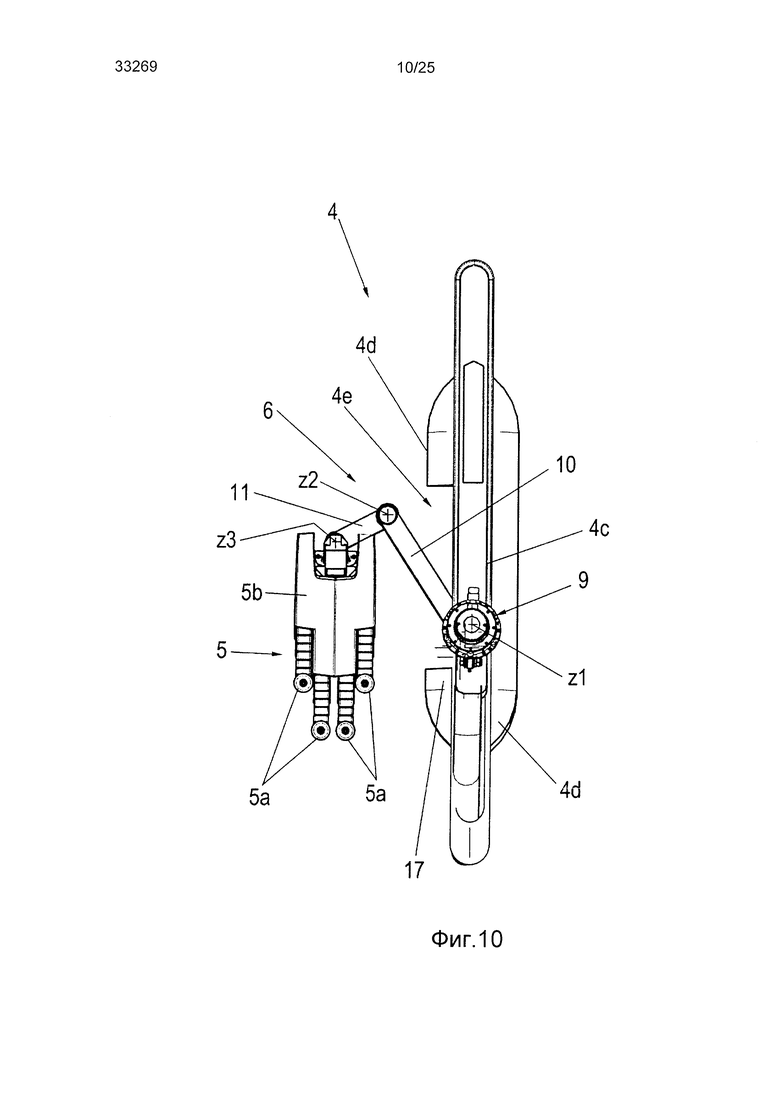
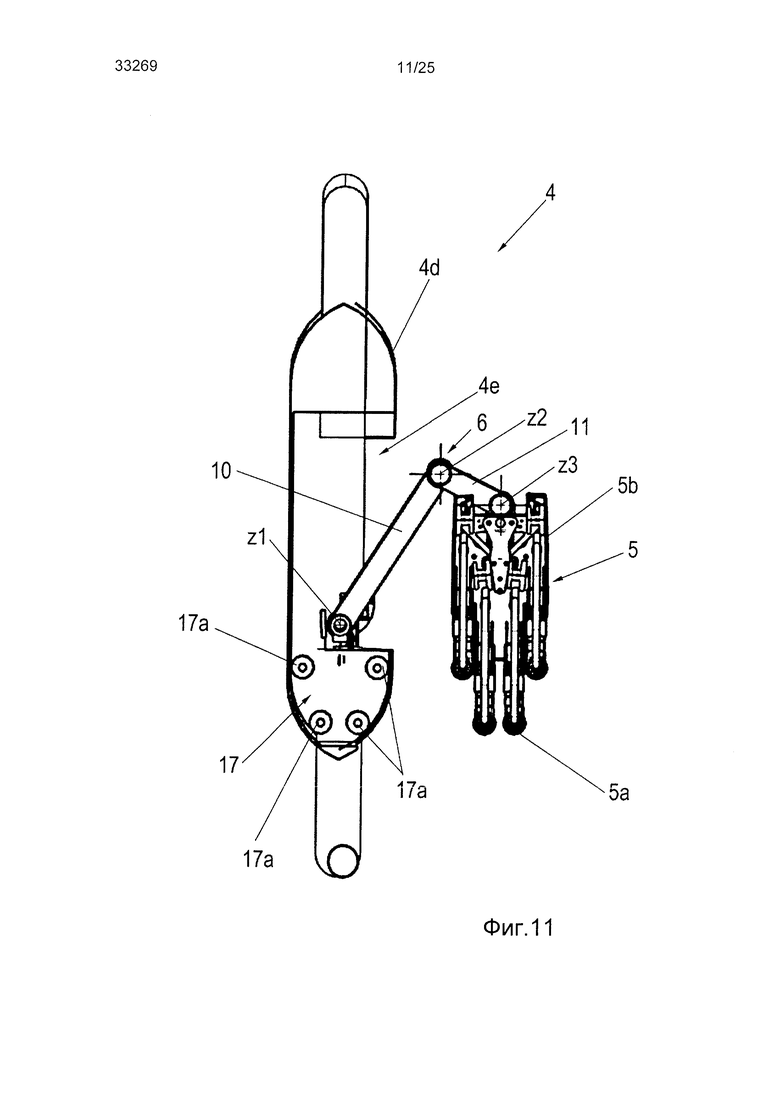
Фиг. 9-11. Вид сзади, сверху и снизу предлагаемой перегородки с рычажным механизмом в рабочем положении.
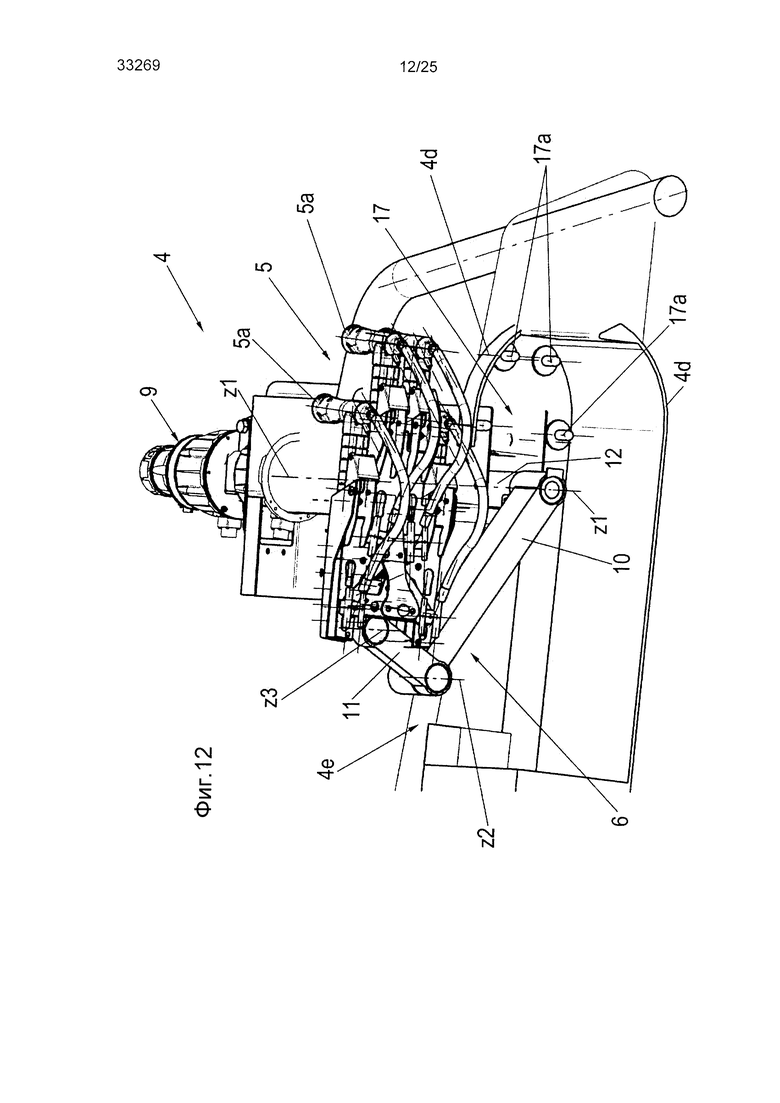
Фиг. 12. Детальный вид в аксонометрии снизу предлагаемой перегородки с рычажным механизмом в рабочем положении.
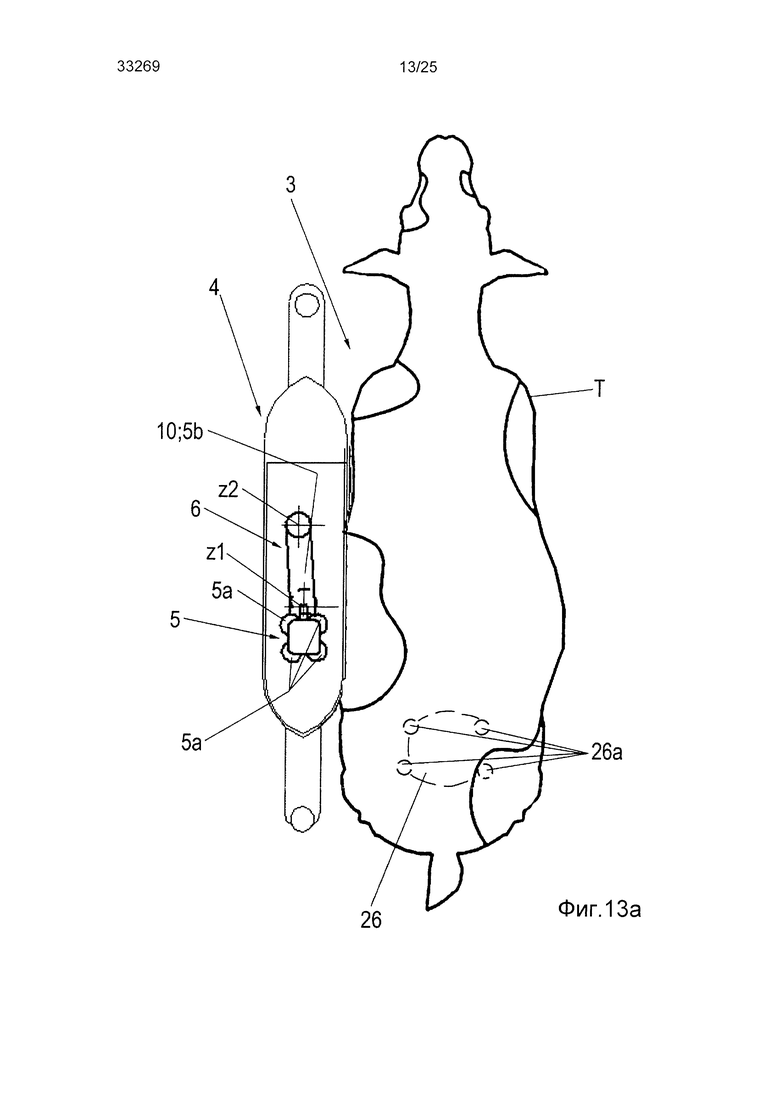
Фиг. 13а - 13с. Вид снизу предлагаемой перегородки с измененным рычажным механизмом в различных положениях и подлежащим дойке животным.
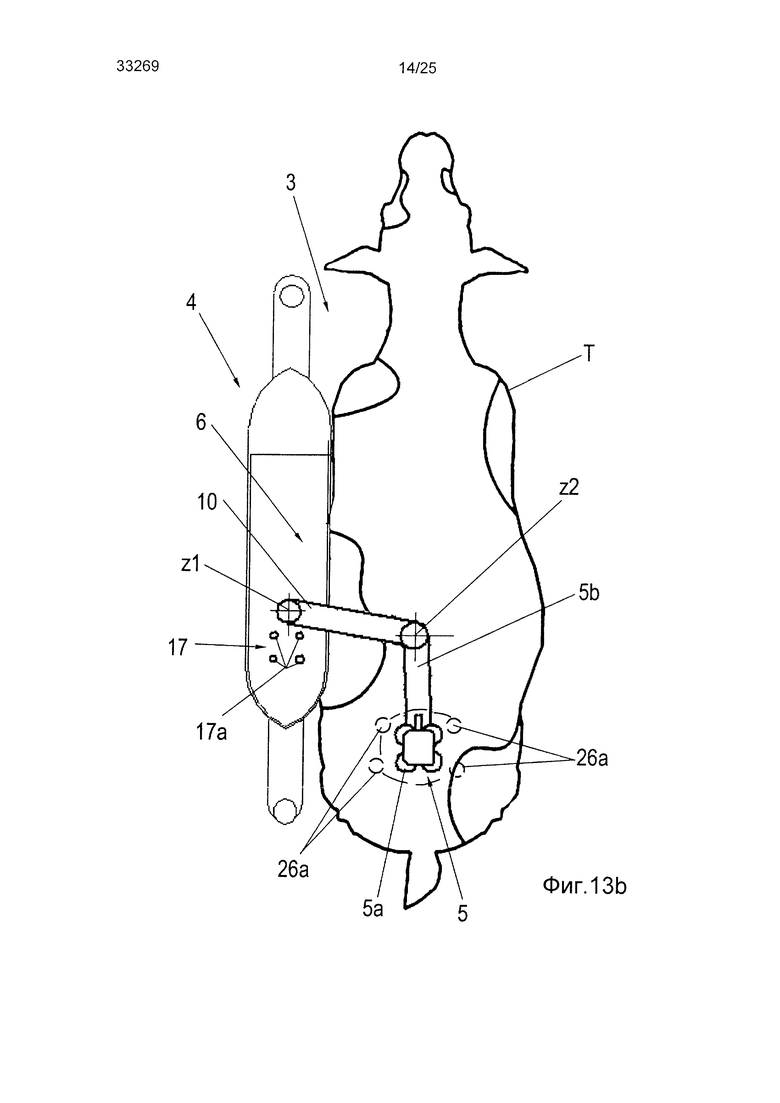
Фиг. 13b. Предлагаемая перегородка с измененным рычажным механизмом, выполненным согласно фиг. 13а, в рабочем положении (в предварительном положении).
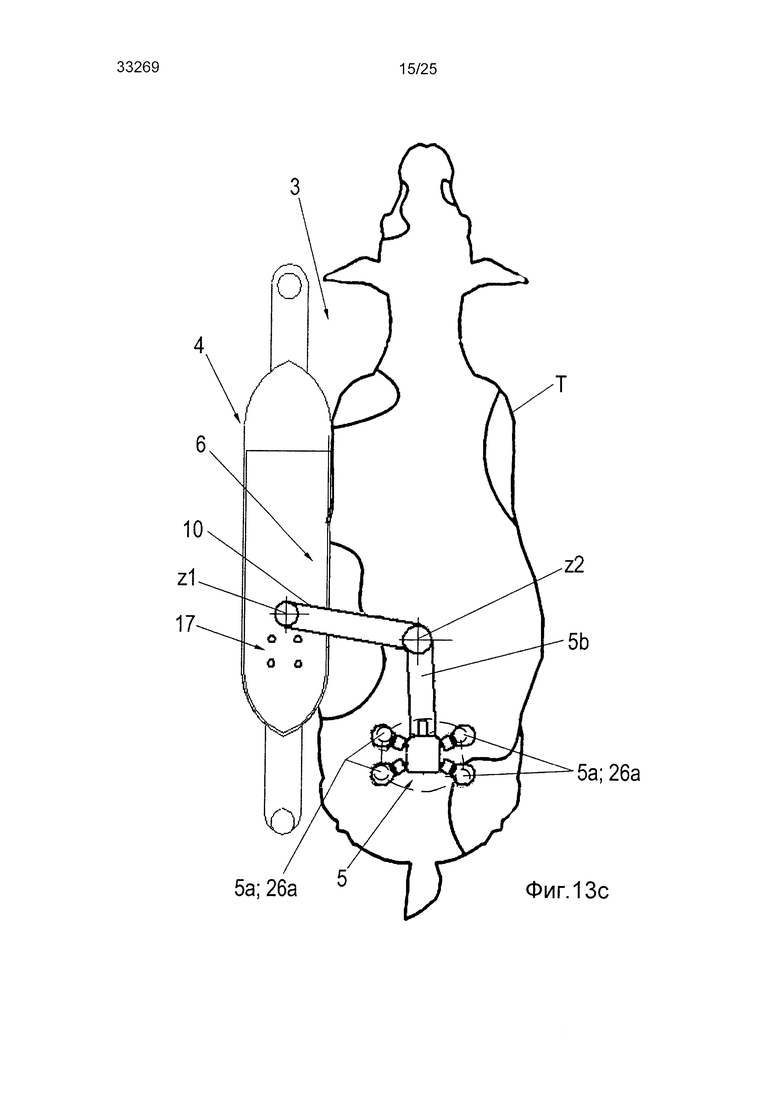
Фиг. 13с. Предлагаемая перегородка с измененным рычажным механизмом, выполненным согласно фиг. 13а, в рабочем положении (в положении доения).
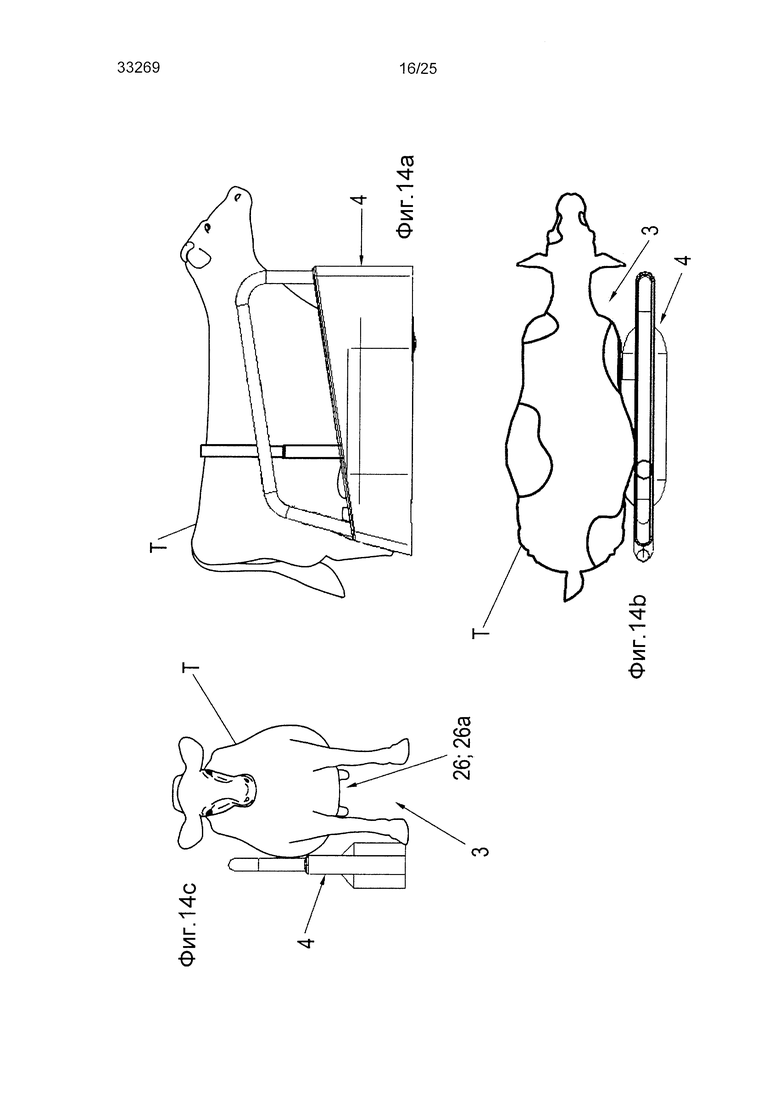
Фиг. 14а - 14с. Различные изображения доильного станка с предлагаемой перегородкой с измененным рычажным механизмом, выполненным согласно фиг. 13а.
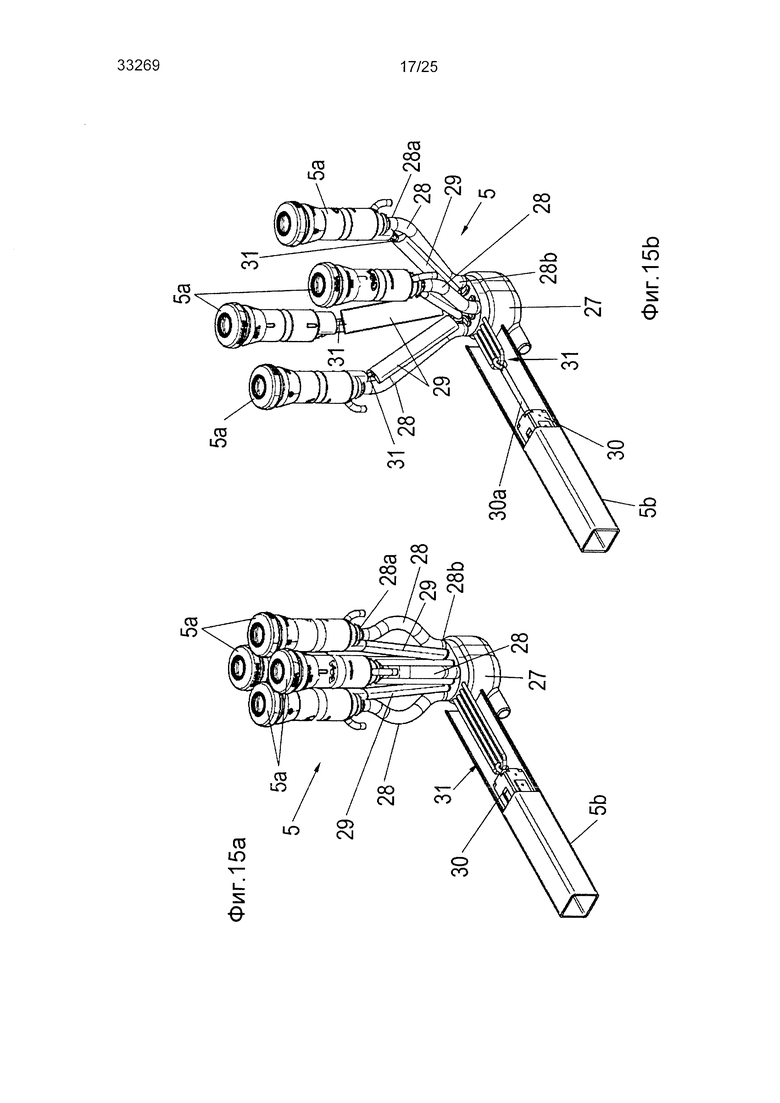
Фиг. 15а - 15b. Доильный аппарат с измененным рычажным механизмом, выполненным согласно фиг. 13а, в разных положениях.
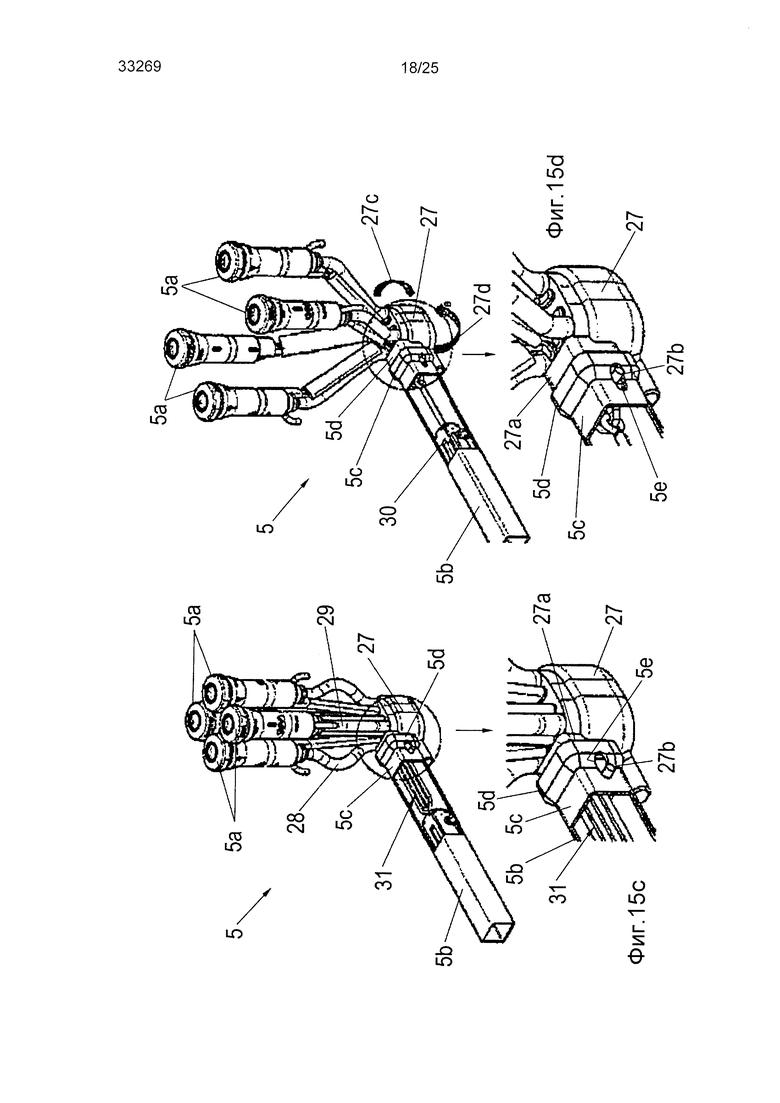
Фиг. 15с - 15d. Вариант осуществления доильного аппарата, выполненного согласно фиг. 15а - 15b.
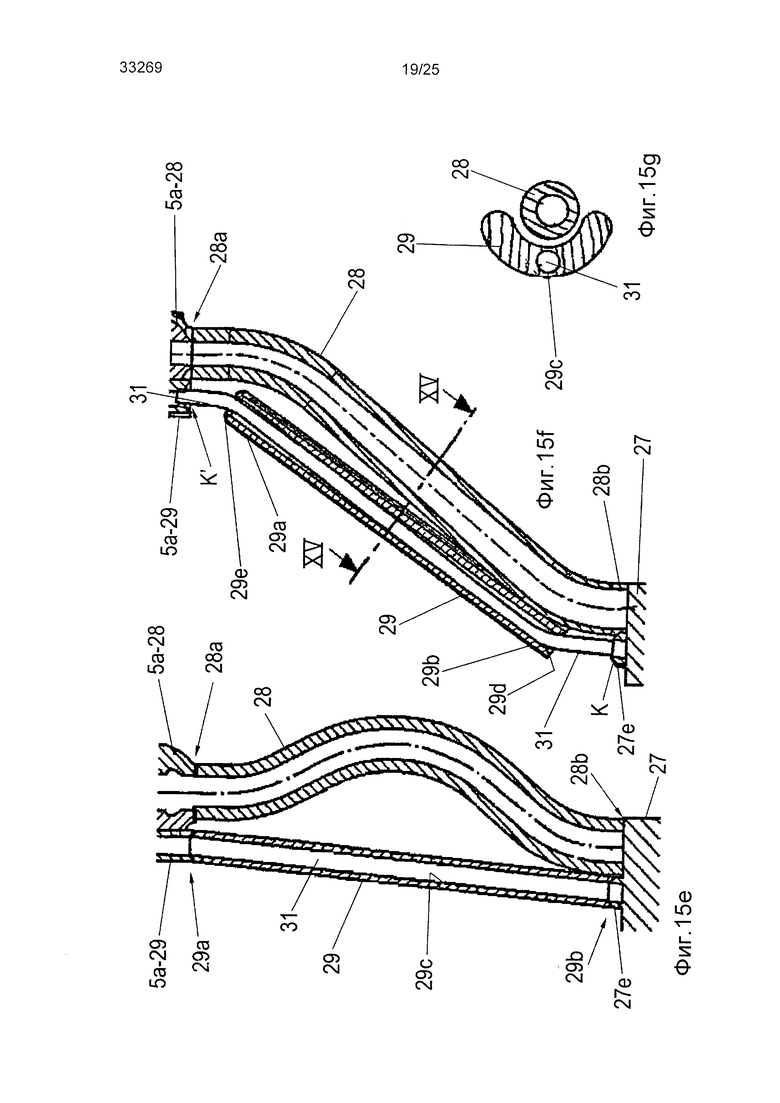
Фиг. 15е - 15f. Изображения с частичным разрезом доильного аппарата, выполненного согласно фиг. 15а - 15d.
Фиг. 15g. Увеличенный разрез по линии XV на фиг. 15d.
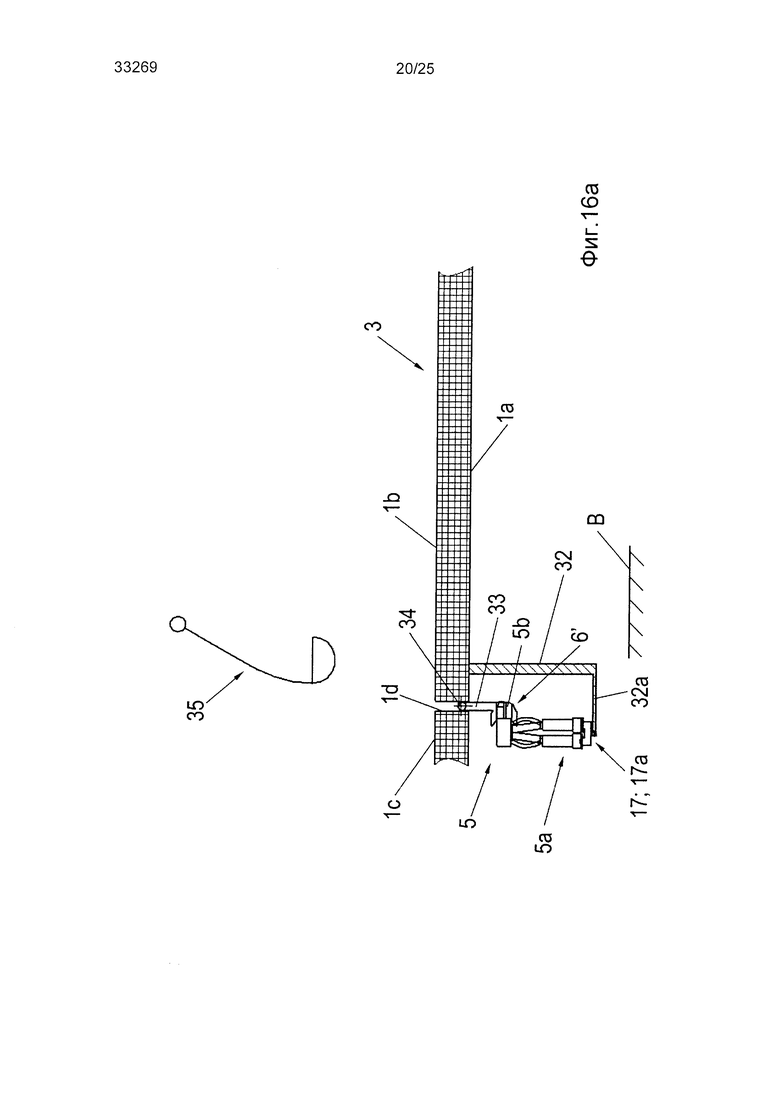
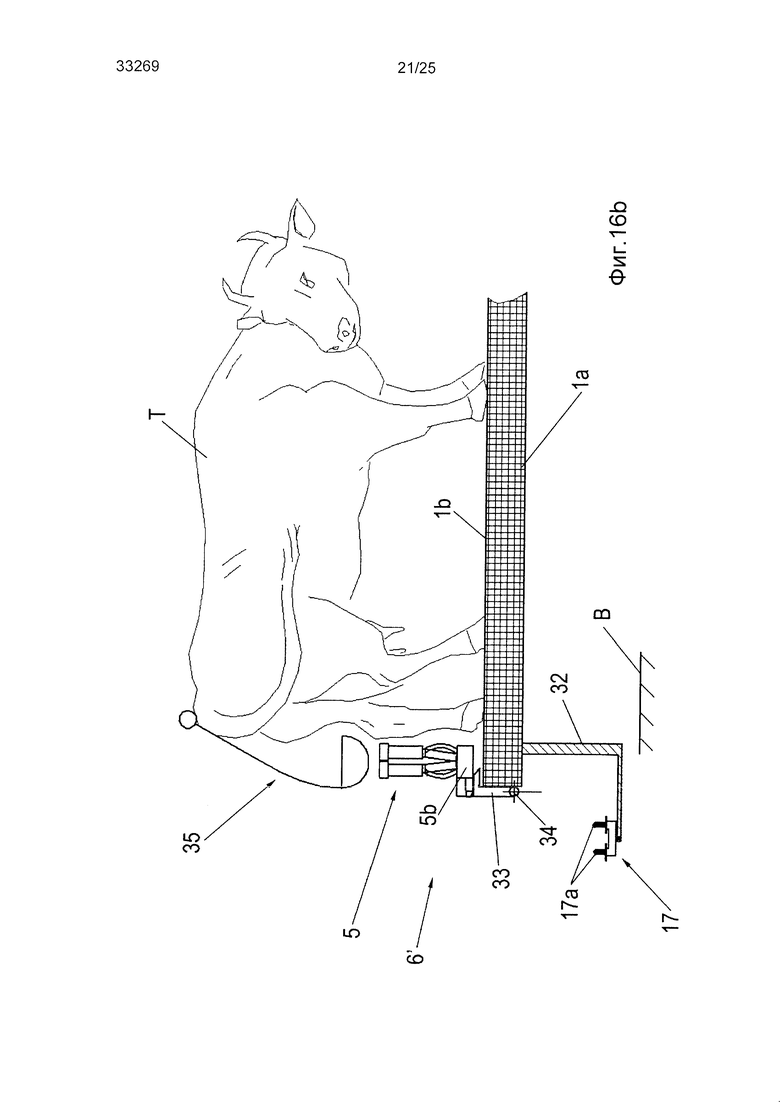
Фиг. 16а и 16b. Схематичные разрезы четвертого варианта осуществления предлагаемой доильной установки предлагаемой перегородки с еще одним вариантом рычажного механизма в различных положениях.
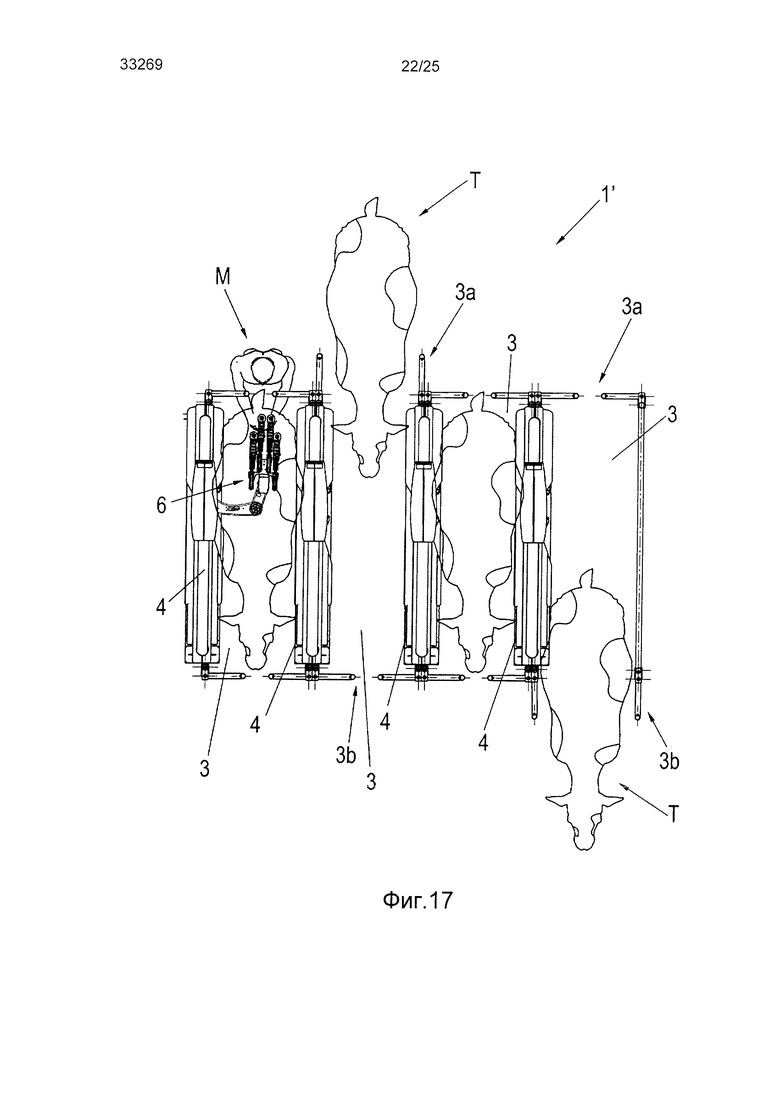
Фиг. 17. Схематичный вид сверху варианта второго варианта осуществления, выполненного согласно фиг. 2, 2а.
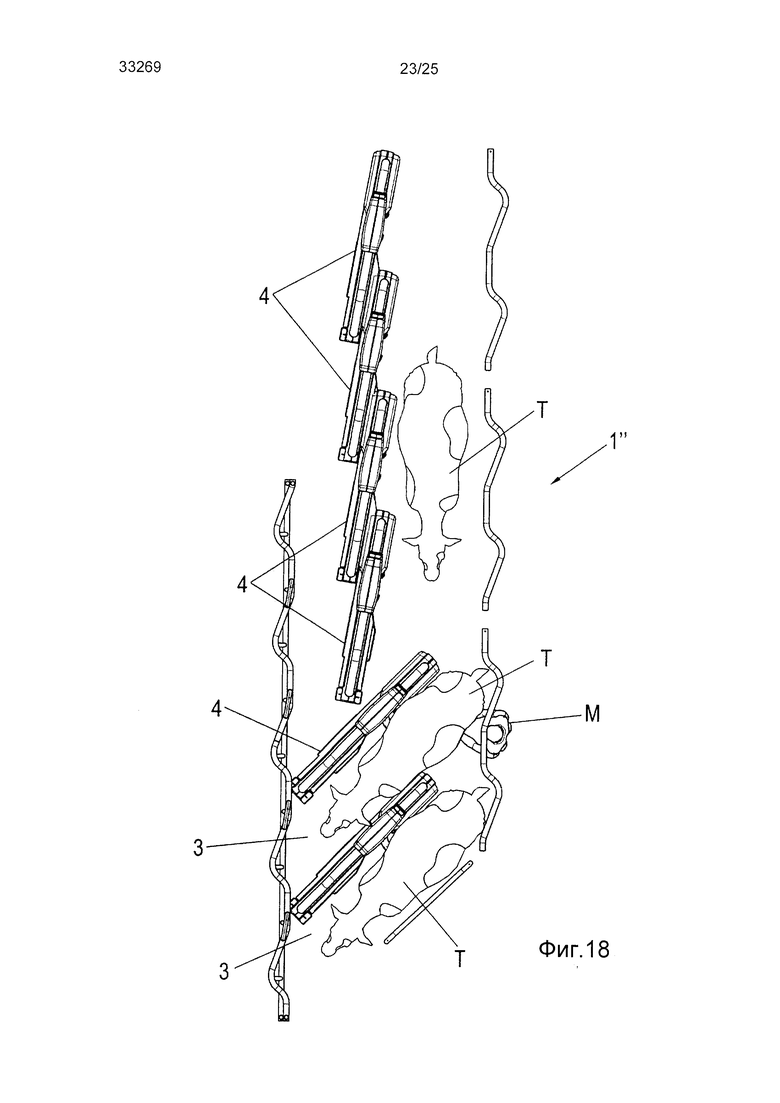
Фиг. 18. Схематичный вид сверху варианта третьего варианта осуществления, выполненного согласно фиг. 3.
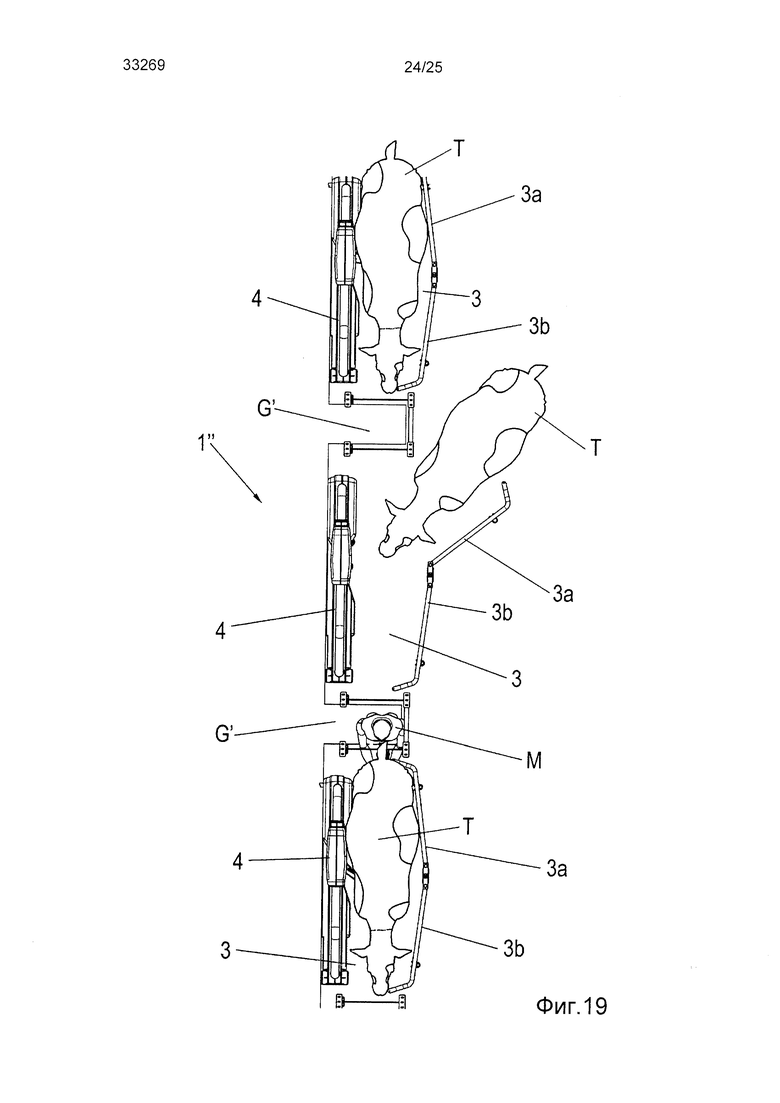
Фиг. 19. Схематичный вид сверху еще одного варианта третьего варианта осуществления, выполненного согласно фиг. 3.
Фиг. 20. Схематичный вид сверху варианта первого варианта осуществления предлагаемой доильной установки, содержащей роботизированное устройство.
Одинаковые или аналогичные функциональные элементы отмечены на чертежах одними и теми же ссылочными обозначениями. На некоторых чертежах обозначено вертикальное направление z.
На фиг. 1. схематично показан сверху первый вариант осуществления предлагаемой доильной установки 1, содержащей перегородки, выполненные в соответствии с первым вариантом осуществления.
Доильная установка 1 устроена по типу так называемой доильной карусели с доением снаружи. При этом подлежащие дойке животные стоят так, что их головы направлены к центру, т.е. к центру 2 поворота. Здесь карусель может поворачиваться вокруг центра 2 поворота по часовой стрелке. Конечно, в другом варианте осуществления карусель также может поворачиваться против часовой стрелки. В этом варианте по периметру карусели расположено тридцать шесть доильных станков 3, разделенных перегородками 4. Перегородки 4 также обозначают, например, как перегородки, при этом они расположены приблизительно параллельно продольной оси подлежащего дойке животного. Доильную установку 1 применяют для машинного доения дойных животных, например, коров, при помощи доильных аппаратов 5. Для каждого доильного станка 3 предусмотрено наличие доильного аппарата 5, который при помощи рычажного механизма 6 может перемещаться в доильном станке 3 из исходного положения в рабочее положение, под вымя подлежащего дойке животного, например, коровы. Каждый доильный аппарат 5 расположен внутри перегородки 4. Эти положения более подробно рассмотрены ниже.
Животные могут заходить на карусель через вход 7 и снова выходить из нее через выход 8. После входа животного в доильный станок 3 важно, чтобы оно заняло фиксированное положение. Это достигается благодаря тому, что перегородки 4 образуют огороженный доильный станок 3. Если животное стоит в доильном станке 3, то предпочтительно в круговом сегменте, который здесь обозначен как зона б установки, доильный аппарат 5 перемещается из исходного положения в перегородке 4 сбоку животного в рабочее положение между его передними и задними ногами, под вымя животного и устанавливается на вымя при помощи датчика 13 положения (см. фиг. 4, 5). Однако в принципе установка может осуществляться при любом положении карусели, например, когда .доильный аппарат снова разъединен., В первом варианте осуществления перегородок 4 на каждой перегородке 4 расположен узел 9 привода, соединенный с рычажным механизмом 6. После завершения процесса доения доильный аппарат 5 снова снимается при помощи рычажного механизма 6 и узла 9 привода или он опускается сам в положение ожидания или окончания доения, а затем перемещается в исходное положение.
Все доильные станки 3 на внешнем периметре доильной установки 1 доступны для дояра, так что он в любой момент времени может вмешаться в процесс доения. Поэтому в этой рабочей зоне дополнительные устройства отсутствуют. Опасность для дояра минимизируется. Доильная карусель может совершать поворот постоянно.
Доильный аппарат 5 в доильном станке 3 устанавливается сбоку к подлежащему дойке животному и позиционируется сбоку животного, под его выменем.
Рычажный механизм 6, имеющий верхнее плечо 10 и нижнее плечо 11, имеет функцию переноса доильный аппарат 5 со сбалансированным весом, при этом он должен иметь такой легкий ход, чтобы он мог следовать за перемещениями подлежащего дойке животного.
Более подробно рычажный механизм 6 описан ниже в разных вариантах его осуществления.
На фиг. 2 - 2а схематично изображен второй вариант осуществления предлагаемой доильной установки Т, содержащей предлагаемые перегородки 4. Фиг. 2 представляет собой вид спереди, а фиг. 2а - вид сверху. Здесь доильные станки 3 расположены рядом друг с другом и разделены перегородками 4. В доильных станках 3 находятся подлежащие дойке животные, в данном случае коровы. На каждой перегородке 4 расположен узел 9 привода для рычажного механизма 6 с доильным аппаратом 5.
На фиг. 3 показан схематичный вид сверху третьего варианта осуществления предлагаемой доильной установки 1", содержащей предлагаемые перегородки 4. В этом третьем варианте осуществления перегородки 4 расположены с возможностью поворота в U-образом проходе, причем сначала они образуют проход благодаря тому, что перегородки 4 повернуты в одну линию и направляют животных Т. Как только первое животное доходит до конца U-образного прохода, первая перегородка, на фиг. 3 расположенная слева, поворачивается против часовой стрелки так, что образуется доильный станок 3. Это поворачивание может происходить либо под управлением поворотного исполнительного механизма, либо автоматически вследствие перемещения животного Т. Эти процессы протекают до тех пор, пока в доильной установке 1" не будут расположены все животные. Здесь на каждой перегородке 4 также расположен узел 9 привода для рычажного механизма 6 с доильным аппаратом 5. Здесь также возможна стыковка (более подробно поясняется ниже) узлов 9' привода, перемещающихся по расположенной вверху или внизу направляющей.
В данном случае симметрично расположено два U-образных прохода, разделенных так называемой траншеей G. Траншея G представляет собой местонахождение дояра, который отсюда с обеих сторон контролирует процесс доения и при необходимости может осуществить соответствующее вмешательство, не встречая помех из-за перемещения рычажных механизмов 6.
Фиг. 4. представляет собой схематичное изображение в аксонометрии предлагаемой перегородки 4 с рычажным механизмом 6 в исходном положении. На фиг. 5. показано схематичное изображение в аксонометрии предлагаемой перегородки 4 с рычажным механизмом 6 в рабочем положении. На фиг. 6 перегородка показана сбоку.
Здесь перегородка 4 выполнена в виде корпуса, в котором расположены все исполнительные устройства для рычажного механизма 6 и доильного аппарата 5, а также элементы управления и узлы привода. Таким образом, перегородка 4 представляет собой узел в комплекте, который можно предварительно собрать в заданном месте, заменить в комплекте или модернизировать.
В данном случае перегородка 4 представляет собой трубчатую конструкцию, содержащую слегка наклонную переднюю стойку 4а и заднюю стойку 4b. Стойки 4а, 4b соединены посредством проходящей в горизонтальном направлении горизонтальной штанги 4с. Начиная приблизительно с половины высоты, стойки 4а, 4b покрыты облицовкой 4d, проходящей приблизительно до нижних концов стоек 4а, 4b. Стойки 4а, 4b и горизонтальная штанга 4с могут быть изготовлены также за одно целое из гнутой трубы. В передней половине облицовки 4d выполнено отверстие 4е, вследствие чего внутри перегородки 4 в облицовке 4d получается гнездо, которое также может иметь направленные в стороны выпуклости (см., например, фиг. 7) так, чтобы в нем размещался и оно окружало установленный в исходное положение доильный аппарат 5. Сбоку отверстия 4е может быть установлена дополнительная защитная крышка (на чертеже не показана) для защиты доильного аппарата 5. При активации доильного аппарата 5 защитная крышка может сдвигаться, например, в направлении перегородки 4, чтобы открыть отверстие 4е. В еще одном варианте осуществления защитная крышка может быть установлена также на доильном аппарате 5. Таким образом, защитная крышка сохраняет жесткое соединение с доильным аппаратом 5 и перемещается вместе с ним. Кроме того, в рабочем положении она может быть уменьшена, например, в результате автоматического складывания или сдвигания.
Доильный аппарат 5 установлен на нижнем плече 11 рычажного механизма 6. В этом варианте осуществления доильный аппарат 5 имеет четыре доильных стакана 5а. Каждый из этих четырех доильных стаканов 5а может принимать разное положение независимо от других стаканов, автоматически фиксироваться или переключаться в режим свободного перемещения. Таким образом, в установленном состоянии доильные стаканы 5а могут принимать индивидуальные положения, так как доильные стаканы 5а устанавливаются по отдельности. Кроме того, возможно предварительное позиционирование доильных стаканов (на чертеже не показано), посредством которого возможна одновременная установка нескольких доильных стаканов.
Кроме того, доильный аппарат 5 имеет датчик 13 положения, который в данном случае выполнен в виде трехкоординатного оптического датчика. Благодаря датчику 13 положения доильный аппарат 5 при помощи рычажного механизма 6 и узла 9 привода перемещается из исходного положения в рабочее положение (см. фиг. 5).
В рабочем положении доильный аппарат 5 может принимать различные положения. Например, положение установки служит для того, чтобы позиционировать доильные стаканы 5а так, что каждый из них можно прикрепить к соответствующему соску подлежащего дойке животного. В процессе доения рычажный механизм 6 поддерживает доильный аппарат 5 так, чтобы вес этого аппарата не затруднял процесс доения. По завершении доения доильные стаканы 5а снова отсоединяются от вымени подлежащего дойке животного.
Управление процессами перемещения рычажного механизма 6 и доильного аппарата 5 осуществляется при помощи управляющего устройства, которое здесь не показано. Управляющее устройство соединено с датчиком 13 положения и узлом 9 привода. В этом варианте осуществления узел 9 привода установлен на верхнем конце приводного вала 12 верхнего плеча, имеющего вертикальную ось z1. Приводной вал 12 верхнего плеча, а вместе с ним и узел 9 привода и рычажный механизм 6 с доильным аппаратом 5 закреплены в направляющем узле 18 на горизонтальной штанге 4с перегородки 4 и направлены как с возможностью поворота, так и перемещения в вертикальном направлении. Своим нижним концом приводной вал 12 верхнего плеча жестко соединен с концом верхнего плеча 10 рычажного механизма 6. На своем верхнем конце вал 12 верхнего плеча соединен с узлом 9 привода. В валу 12 верхнего плеча, выполненном в виде полого вала, расположен еще один вал для привода нижнего плеча 11, который может приводиться в действие еще одним приводом узла 9 привода. Приводной вал 12 верхнего плеча и соединенный с ним рычажный механизм 6 с доильным аппаратом 5 может перемещаться в вертикальном направлении при помощи вертикального привода 15 (см. фиг. 6), например, пневмоцилиндра. Вертикальный привод 15 соединен на нижнем конце с перегородкой 4, а верхний конец шарнирно соединен посредством шарнирного соединения 16 в области верхнего конца вала 12 верхнего плеча с креплением узла 9 привода, которое подробно не описывается.
Приводы узла 9 привода можно реализовать в разных исполнениях, например, в виде серводвигателей с соответствующими редукторами, хотя также можно применять двигатель непосредственной передачи поворота. Кроме того, их можно выполнить в виде так называемых моментных двигателей, благодаря чему достигают определенной эластичности рычажного механизма 6 и доильного аппарата 5. Например, можно амортизировать удары подлежащего дойке животного.
Таким образом, верхнее плечо 10 и нижнее плечо 11 можно целенаправленно приводить в действие независимо друг от друга. Верхнее плечо 10 и нижнее плечо 11 могут поворачиваться относительно друг друга вокруг вертикальной оси z2. Кроме того, здесь нижнее плечо 11 при помощи шарнира с вертикальной осью z3 соединено с возможностью поворота с доильным аппаратом 5. Вертикальные . оси z1, z2 и z3 расположены параллельно друг другу.
В одном из вариантов осуществления нижнее плечо 11 и доильный аппарат 5 (нижнее плечо 11 в одном из вариантов осуществления одновременно может представлять собой держатель доильного аппарата, более подробно это пояснено ниже) могут поворачиваться без собственного привода, при помощи параллелограммного механизма, в результате поворачивания верхнего плеча 10. Для этого, например, требуется лишь поворотный привод 14 узла 9 привода (см. фиг. 6).
Здесь узел 9 привода расположен в верхней части перегородки 4, над подлежащим дойке животным, за пределами его досягаемости. С одной стороны, это дает то преимущество, что узел 9 привода находится в области, не подверженной опасности толчков. К тому же верхняя часть, расположенная выше животного, лучше защищена от влаги и связанных с ней повреждений. Кроме того, благодаря этому возможно особенно узкая конструкция перегородки 4. Рычажный механизм 6 с доильным аппаратом 5 расположен в нижней части перегородки 4 так, что может происходить необходимое поворачивание сбоку рычажного механизма 6 с доильным аппаратом 5 под брюхом подлежащего дойке животного. При этом также можно избежать столкновения с ногами подлежащего дойке животного.
В исходном положении доильного аппарата 6 и рычажного механизма 6 внутри облицовки 4d перегородки 4 доильный аппарат 5 может перемещаться под устройство 17 для очистки, которое более подробно описано ниже.
На фиг. 7. изображена сверху предлагаемая перегородка 4 с рычажным механизмом 6 в исходном положении. Здесь ясно видно, что облицовка имеет выпуклости с обеих сторон центральной продольной оси перегородки 4 и полностью вмещает рычажный механизм 6 вместе с доильным аппаратом 5. В этом отношении на фиг. 8 показан вид снизу.
На фиг. 9. Показан вид сзади предлагаемой перегородки 4 с доильным аппаратом 5 в рабочем положении. Облицовка 4d перегородки 4 имеет выпуклость в нижней части, т.е. под брюхом подлежащего дойке животного, стоящего сбоку от перегородки, так что занимается минимальное пространство. Таким образом, животные Т могут стоять настолько близко друг к другу, как если бы перегородка 4 с встроенным рычажным механизмом 6 и доильным аппаратом 5 не существовала. Здесь узел 9 привода показан с двигателем поворотного привода 14. Доильный аппарат 5 имеет держатель 5b доильного аппарата, который с возможностью поворота соединен с нижним плечом 11 в вышеупомянутом шарнире с вертикальной осью z3.
На фиг. 10 показан вид сверху перегородки 4 с рычажным механизмом 6 и доильным аппаратом 5 в рабочем положении. Доильный аппарат 5 проходит приблизительно параллельно перегородке 4.
На фиг. 11 показан вид снизу перегородки 4 с изображением устройства 17 для очистки, содержащего очистные форсунки 17а. Если доильный аппарат 5 принимает исходное положение, то это положение одновременно является положением для так называемой безразборной чистки. При этом вертикальный привод 15 перемещает рычажный механизм 6 с доильным аппаратом 5 в вертикальном направлении z вверх до тех пор, пока очистные форсунки 17а не начнут взаимодействовать соответственно с одним из доильных стаканов 5а доильного аппарата 5, чтобы очистить их при помощи жидкости для чистки. В очистные форсунки 17а также можно подавать воздух, чтобы сделать возможной сушку доильных стаканов после очистки. Кроме того, вертикальный привод 15 может перемещать доильный аппарат 5 и, следовательно, доильные стаканы 5а в вертикальном направлении на определенное расстояние вверх и вниз, причем, например, очистные форсунки 17а могут очищать доильные стаканы 5а изнутри. С этой целью очистные форсунки 17а могут, иметь соответствующую конструкцию, например, их можно выполнить в виде форсунок с полым конусом распыла и/или распылом в радиальном направлении. Кроме того, в специальном варианте осуществления в дополнение к очистным форсункам 17а доильные стаканы 5а могут очищаться снаружи при помощи форсунок для наружной очистки, которые здесь не изображены. Кроме того, может осуществляться дезинфекция.
Фиг. 12. представляет собой детальный вид в аксонометрии снизу предлагаемой перегородки 4 с рычажным механизмом 6 в рабочем положении, причем под облицовкой 4d хорошо видно устройство 17 для очистки с очистными форсунками 17а.
Доение начинается, если управляющее устройство определило, что подлежащее дойке животное находится в положении доения. Это может быть определено, например, при помощи камеры, закрепленных на ногах датчиков, датчиков приближения и т.д. Доение начинается с процесса установки в рабочем положении доильного аппарата 5. Грубое позиционирование по высоте может осуществляться при помощи пневмоцилиндра, применяемого в качестве вертикального привода 20. Затем следует относительная установка доильных стаканов на соски вымени подлежащего дойке животного, причем позиционирование при помощи датчика 13 положения выполняется посредством того, что рычажный механизм 6 производит точное позиционирование доильного аппарата 5.
На фиг. 13а показана снизу предлагаемая перегородка 4 с вариантом осуществления рычажного механизма 6, находящимся в исходном положении, а также подлежащее дойке животное Т. На фиг. 13b показан вариант осуществления рычажного механизма, выполненного согласно фиг. 13а, в рабочем положении в предварительном положении. На фиг. 13с показан вариант осуществления рычажного механизма, выполненного согласно фиг. ,13а, в рабочем положении в положении доения. На фиг. 14а доильный станок 3 показан сбоку, на фиг. 14b - сверху, а на фиг. 14с - спереди.
Животное Ф своим боком стоит вплотную к перегородке 4, причем воображаемая продольная ост животного Ф проходит приблизительно параллельно продольной оси перегородки 4. Нижняя часть животного Ф показана здесь с выменем 26, имеющим четыре соска 26а.
Этот вариант осуществления рычажного механизма 6 заключается в том, что нижнее плечо выполнено в виде держателя 5b доильного аппарата, а шарнир с вертикальной осью z3 отсутствует. Верхнее плечо 10 соединено шарнирно, с возможностью поворота вокруг вертикальной оси z2, с одним концом держателя 5b доильного аппарата. На другом конце держателя 5b доильного аппарата закреплен доильный аппарат 5, который более подробно описан ниже.
На фиг. 13а рычажный механизм 6 находится в исходном положении и одновременно в положении промывки, причем доильный аппарат 5 находится под устройством 17 для очистки и контактирует с ним (как описано выше). Устройство 17 для очистки с его очистными форсунками 17а изображено на фиг. 13b и 13с.
Доение может начаться, после того как управляющее устройство определило, что подлежащее дойке животное Ф находится в положении доения. Таким образом, доение при помощи этого рычажного механизма 6 начинается посредством того, что рычажный механизм 6 перемещает доильный аппарат 5 в рабочее положение под выменем 26 подлежащего дойке животного Т, показанное на фиг. 13b. Для этого доильный аппарат 5 в результате перемещения рычажного механизма 6 в направлении вертикальной оси z1 сначала удаляется от устройства 17 для очистки настолько, что может последовать поворачивание под подлежащее дойке животное Т.
В рабочем положении в соответствии с фиг. 13b рычажный механизм 6 вместе с доильным аппаратом 5 занимает предварительное положение, которое также называют положением захвата. После этого дояр M (см. фиг. 17-19) или роботизированное устройство 20 (в качестве примера на фиг. 20 показан внутренний робот) захватывает вместе доильные стаканы 5а доильного аппарата 5 (но он (оно) может захватить их также один за другим или попарно) и устанавливает на соски 26а вымени 26 подлежащего дойке животного Т. Другими словами, нижнее плечо рычажного механизма 6 выполнено в качестве держателя 5b для доильного аппарата 5. Рычажный механизм 6 предварительно позиционирует держатель 5b доильного аппарата вместе с доильным аппаратом 5, как модуль доильных стаканов, поворачиваемый внутрь, под центр вымени 26, в рабочее положение, удобное для захвата дояром M или роботизированным устройством 20. Дояр M стоит позади или сбоку от подлежащего дойке животного Ф и осуществляет установку, а по завершении доения - отвод доильных стаканов 5а доильного аппарата 5. Вместо дояра M эти действия может осуществить роботизированное устройство 20 с разных положений (сзади, спереди через ноги животного Т, или сбоку), как описано ниже в связи с фиг. 20.
При этом в качестве поворотного привода 14 и вертикального привода 15 можно использовать простые приводы, например, пневмоцилиндры. Конечно, возможны комбинации из вышеперечисленных двигателей.
В этом варианте осуществления не требуется позиционирование при помощи датчика 13 положения. Датчик 13 положения можно либо использовать для грубого позиционирования под животным Т, под выменем 26, либо вообще отказаться от него. Это - так называемый полуавтоматический режим.
В данном случае в качестве доильного аппарата 5 применяют обычный доильный аппарат 5, который на фиг. 15а показан в предварительном положении или положении захвата согласно фиг. 13b вместе с вариантом осуществления рычажного механизма 6 согласно фиг. 13а. На фиг. 15b доильный аппарат 5 изображен в положении доения, схематично показанном на фиг. 13с, причем подлежащее дойке животное Ф здесь не показано. На фиг. 15с вариант доильного аппарата, выполненный согласно фиг. 15а и 15b, показан в предварительном положении, а на фиг. 15d - в положении доения. На фиг. 15е показан вид в частичном разрезе доильных аппаратов 15а и 15с, находящихся в предварительном положении, на фиг. 15f показано положение доения. На фиг. 15g показан увеличенный разрез по линии XV на фиг. 15f.
В данном случае доильный аппарат 5 имеет четыре доильных стакана 5а. В доильном аппарате 5 объединены функции очистки сосков, предварительного окунания и окунания после доения.
В представленном варианте держатель 5b доильного аппарата выполнен в виде квадратной трубы, причем конец с шарниром и вертикальной осью z2 в качестве шарнирного соединения с верхним плечом 10 рычажного механизма 6 не показан. Другой конец держателя 5b доильного аппарата соединен с коллектором 27, предпочтительно выполненным в виде коллектора доильного аппарата в соответствии с DE 10 2008 063 715 А1 (т.к. при этом вакуум для доильного аппарата освобождается только тогда, когда доильные стаканы установлены на соски 26а). Описание функционирования такого коллектора можно взять из документа DE 10 2008 063 715 А1.
На фиг. 15а и 15b соединение между держателем 5b доильного аппарата и коллектором 27 показано как жесткое соединение. В варианте, выполненном в соответствии с фиг. 15с и 15d, коллектор 27 закреплен на держателе 5b доильного аппарата при помощи соединения, которое в предварительном положении образует жесткое соединение, а в положении доения обеспечивает возможность свободы перемещения коллектора 27 в определенных пределах. Более подробно это объяснено ниже в связи с фиг. 15с и 15d.
Каждый из четырех доильных стаканов 5а соединен своей нижней стороной на соединительной части 5а-28 при помощи наконечника 28а со шлангопроводом 28, который в свою очередь при помощи еще одного наконечника 28b соединен с коллектором 27. Кроме того, на своей нижней стороне каждый доильный стакан 5а рядом с наконечником 28а соответствующего шлангопровода 28 на соединительной части 5а-29 прикреплен к концу тянущего средства 31, которое проведено с возможностью перемещения через неподвижный сегментный элемент 29 (который также называется центральным элементом). Тянущие средства 31 могут представлять собой, например, тросы или цепи. Здесь сегментный элемент 29 выполнен прямым и с серповидным или банановидным поперечным сечением (см. фиг. 15g), посредине которого имеется канал 29с круглого сечения для тянущего средства 31. Как показано на фиг. 15g, каждый шлангопровод 28, по меньшей мере в области наконечников 28а, 28b, приблизительно в одном квадранте окружен соответствующим сегментным элементом 29. Каждый сегментный элемент 29 имеет концевую часть 29а, обращенную к соответствующему доильному стакану 5а, и концевую часть 29b, обращенную к коллектору 27, при этом он расположен между нижней стороной каждого соответствующего доильного стакана 5а и верхней стороной коллектора 27.
В предварительном положении благодаря тянущему усилию тянущего средства 31 концевая часть 29а сегментного элемента 29 контактирует с соединительной частью 5а-29 соответствующего доильного стакана 29е так, чтобы наружный конус 29е концевой части 29а контактировал с внутренним конусом К' соединительной части 5а-29, посредством чего осуществляется центрирование (фиг. 15е и 15f).
В предварительном положении вследствие тянущего усилия тянущего средства 31 концевая часть 29b соответствующего сегментного элемента 29 на верхней стороне коллектора 27, рядом с концевой частью 28b соответствующего шлангопровода 28, контактирует с центрирующей частью 27е со сквозным отверстием. Центрирующая часть 27е имеет наружный конус К, который соответствует и взаимодействует с внутренним конусом концевой части 29b сегментного элемента (фиг. 15e, 15f).
Тянущее средство 31, выходящее из нижнего конца сегментного элемента 29, проведено через сквозное отверстие центрирующей части 27е, а затем через соединение с держателем 5b доильного аппарата проходит под верхней стороной коллектора 27 в держатель 5b. Кроме того, тянущее средство 31 своим концом вместе с концами других тянущих средств 31 шарнирно соединено с концом приводной штанги 30а исполнительного устройства 30, например, пневмоцилиндра двустороннего или обратного действия. Исполнительное устройство 30 расположено внутри держателя 5b доильного аппарата - это видно благодаря частично разрезанному изображению держателя 5b.
На фиг. 15а, 15с, 15е доильные стаканы 5а не только в исходном положении, но и в предварительном положении или положении захвата удерживаются так, чтобы они располагались вертикально и вплотную друг к другу над коллектором 27, на некотором расстоянии от него, причем указанное расстояние определяется длиной сегментных элементов 29. Кроме того, в этом вертикальном положении захвата все доильные стаканы 5а удерживаются как можно ближе друг к другу, например, чтобы дояр M мог охватить двумя руками все четыре стакана 5а. Это вертикальное положение достигается при помощи тянущего усилия тянущих средств 31 посредством того, что исполнительное устройство 30 натянуло тянущие средства 31, в результате чего доильные стаканы 5а притянуты к сегментным элементам 29 и верхней стороне коллектора 27 и удерживаются до тех пор, пока их не захватит дояр M или захватное устройство робота. Сразу же после захвата доильных стаканов 5а исполнительное устройство 30 ослабляется из своего натянутого положения (фиг. 15а, 15с, 15е) в результате того, что оно перемещается в свободное положение согласно фиг. 15b, 15d, 15f. Это может произойти в результате того, что дояр M активно осуществляет управление, например, на доильном стакане 5а или на держателе 5Ь доильного аппарата (в том числе возможно применение педального выключателя). В случае роботизированного устройства 20 это может произойти автоматически при помощи управляющего устройства.
В свободном положении или положении доения (фиг. 15b, 15d, 15f) приводная штанга 30а (например, шток поршня пневмоцилиндра) перемещена к коллектору 27, при этом тянущие средства 31 уже не натянуты. Таким образом, каждый доильный стакан 5а может свободно перемещаться в пределах освобожденной длины тянущих средств 31 и шлангопроводов 28 и устанавливаться на соответствующем соске 26а подлежащего дойке животного Т. Особое преимущество такого варианта осуществления состоит в том, что при небольшом ходе, например, 15...20 мм, приводной штанги 30а исполнительного устройства 30 можно достичь максимальной свободы перемещения доильных стаканов 5а в свободном положении.
В варианте осуществления согласно фиг. 15с и 15d коллектор 27 в районе соединения с держателем 5b доильного аппарата имеет выступ 27а, который соответствует полости (на чертеже не показана) краевого выступа 5d несущего конца 5с держателя 5b доильного аппарата и в предварительном или натянутом положении тянущих средств 31 образует с ней неподвижное, но разъемное соединение. При этом тянущие средства 31 проходят от коллектора 27 через указанный выступ 27а, через краевой выступ 5d и несущий конец 5с держателя 5b доильного аппарата до точки шарнирного соединения на приводной штанге 30а исполнительного устройства 30. В концевой части выступа 27а, окруженной краевым выступом 27b и частично несущим концом 5с, выступ 27а имеет одну или несколько направляющих элементов 27b, которые выдаются наружу и через направляющую выемку 5е проходят наружу, через стенку несущего конца 5с и частично краевого выступа 5d. Изображенный на фиг. 15d направляющий элемент 27b показан только в качестве примера. Здесь он выполнен в виде штифта, введенного в выемку 5е, сформованную в виде удлиненного отверстия в стенке несущего конца 5с и краевого выступа 5d. Это вариант осуществления выполнен также с противоположной стороны. На чертеже это не показано, но легко представимо.
Выемка 5е, сформованная в виде удлиненного отверстия, проходит в продольном направлении держателя 5b доильного аппарата и направляет направляющий элемент 27b в мере, ограниченной удлиненным отверстием.
В натянутом положении тянущих средств 31, показанном на фиг. 15с, которое одновременно является исходным или предварительным положением, выступ 27а коллектора 27 введен в краевой выступ 5d и несущий конец 5с держателя 5b доильного аппарата, чтобы образовать неподвижное, но разъемное соединение. В свободном положении, т.е. в положении доения, тянущие средства 31, как показано на фиг. 15d, не напряжены, причем, как описано выше, освобождаются не только доильные стаканы 5а, при этом коллектор 27 может извлекаться в определенной мере из несущего конца 5с и краевого выступа 5d держателя доильного аппарата в продольном направлении держателя 5b. Как описано выше, эта мера ограничена выемкой 5е. Коллектор 27 может перемещаться в некоторых пределах в направлениях 27с, 27d перемещения, как, например, показано стрелками в верхней части фиг. 15d. Эта свобода перемещения, например, дает то преимущество, что облегчается установка доильных стаканов 5а при так называемом ступенчатом вымени подлежащих дойке животных.
На фиг. 16а показан схематичный разрез четвертого варианта осуществления предлагаемой доильной установки 1 предлагаемой перегородки 4 с еще одним вариантом рычажного механизма 6' в исходном положении. Рабочее положение (предварительное положение или положение захвата) показано на фиг. 16b.
Доильные станки 3 этого варианта осуществления изобретения могут представлять собой доильные установки 1, выполненные согласно фиг. 1-3, 17-20. Конечно, не исключены другие доильные станки. Здесь показан вариант осуществления доильной карусели с доением снаружи, в которой доильные станки 3 разделены перегородками 4. Перегородка 4 не изображена, но представить ее нетрудно.
На фиг. 16а показан только доильный станок 3 доильной платформы 1b, имеющей нижнюю сторону 1а. Доильная платформа 1b относится, например, к доильной установке 1, выполненной согласно фиг. 1. Доильный станок 3 показан в положении, при котором он находится с левой стороны, рядом с мостиком 1с. На фиг. 16а и 16b центр 2 поворота, т.е. центральная точка доильной карусели с доильным станком 3, находится с правой стороны. Поворот доильной карусели по часовой стрелке вокруг этого не изображенного, но легко представимого центра 2 поворота (см. фиг. 1) означает поворотное перемещение через плоскость фиг. 16а и 16b, причем головная сторона животного Ф обращена к центру 2 поворота, при этом, если на фиг. 16b смотреть с того положения, в котором находится животное Т, животное Ф вместе с доильным станком 3 поворачивается налево. Мостик 1с предназначен для перехода подлежащего дойке животного Т, чтобы оно могло зайти в доильный станок 3, или для перехода нескольких животных. Между мостиком 1с и доильной платформой 1b имеется паз 1d такой ширины, которая не достаточна для того, чтобы копыта животного Ф могли застрять в нем. Кроме того, доильный станок 3 оснащен желобом 35 для навоза, который подробно не описывается. В показанном на фиг. 16а исходном положении рычажный механизм 6' ни в коей мере не мешает животным Т, когда они входят в доильные станки 3 с мостика 1 с, так как рычажный механизм 6' сложен под край мостика 1с и доильной платформы 1b, следовательно, он не заметен для животных Ф и не мешает их перемещениям.
На наружном краю доильной платформы 1b, с ее нижней стороны 1а, под пазом 1d и концевой частью мостика 1с расположен рычажный механизм 6'. Рычажный механизм 6' имеет опорный рычаг 33, который на верхним конце расположен в нижней части паза 1d, в шарнире, имеющем горизонтальную ось 34, проходящую тангенциально к доильной платформе 1b (в данном случае круглой), так, чтобы он мог поворачиваться вокруг этой горизонтальной оси 34. Этот шарнир, имеющий горизонтальную ось 34, может быть расположен или закреплен на доильной платформе 1b или на части перегородки 4. На своем нижнем конце опорный рычаг 33 жестко соединен с держателем 5b доильного аппарата так, чтобы держатель 5b доильного аппарата был расположен под прямым углом к опорному рычагу 33, а доильный аппарат 5, установленный на держателе 5b и имеющий доильные стаканы 5а, в этом исходном положении был направлен вниз. Здесь опорный рычаг 33 применяют в качестве держателя доильного аппарата в положении подачи и держателя шлангов.
Доильный аппарат 5 выполнен, например, так, как показано на фиг. 15а - 15е, причем держатель 5b доильного аппарата имеет соответствующую длину. Исполнительное устройство 30 может быть расположено, например, на опорном рычаге 33 или в опорном рычаге 33. В изображенном на фиг. 16а исходном положении доильные стаканы 5а доильного аппарата 5 прижаты друг к другу в напряженном положении. Кроме того, здесь они расположены вверх дном, контактируя с очистными форсунками 17а устройства 17 для очистки (см. фиг. 13b), закрепленного с нижней стороны 1а доильной платформы 1 b при помощи вертикального держателя 32 и крепежной плиты 32а. Вертикальный держатель 32 может быть установлен также на части перегородки 4.
Как только подлежащее дойке животное Ф появляется на доильном станке 3, а доильная платформа 1b удаляется от мостика 1с, рычажный механизм 6' перемещается из исходного положения в рабочее положение в предварительное положение, как показано на фиг. 16b. Для этого опорный рычаг 33 с находящимся на нем держателем 5b доильного аппарата и доильным аппаратом 5 поворачивается на 180° вокруг горизонтальной оси 34 и своим концом, на котором установлен держатель 5b доильного аппарата, и опорной частью, которая на чертеже не обозначена, прилегает к верхней стороне доильной платформы 1b, используемой как упор. Таким образом, получают положение захвата, при этом дояр M или роботизированное устройство 20 может осуществлять установку доильных стаканов 5а.
Привод опорного рычага 33 не показан, но легко представить, что привод находится в перегородке 4 и, например, поворачивает опорный рычаг 33 при помощи вала и редуктора. Процесс отвода после доения здесь подробно не описывается, - понятно, что он происходит в обратной последовательности.
Опорный рычаг 33 расположен относительно доильного станка 3 посредине, т.е. на краю доильной платформы 1b, посредине между двумя перегородками 4 доильного станка 3.
Перегородка 4 вполне может быть удлинена вниз, при этом в исходном положении в ней может находиться устройство 17 для очистки и рычажный механизм 6'. При этом опорный рычаг 33 сначала может переместиться из исходного положения в нижней части перегородки 4, например, повернуться, в среднее промежуточное положение между перегородками 4 и повернуться на 180° вокруг горизонтальной оси 34 в положение захвата.
На фиг. 17 показан схематичный вид сверху варианта второго варианта осуществления, выполненного согласно фиг. 2 - 2а. Этот вариант также обозначен как доильная установка 1' со сквозным проходом. Доильные станки 3 разделены сбоку перегородками 4. На узких задних и передних сторонах доильных станков 3 установлены соответственно ворота 3а, 3b, причем ворота 3а с задних сторон открыты, чтобы образовывать вход для животного Ф в доильный станок 3 (второй станок 3 слева на фиг. 17). С передней стороны животное Ф выйти не может, так как эта сторона закрыта воротами 3b. Если животное Ф находится полностью в доильном станке 3, то ворота 3а задней стороны закрываются (первый и третий станки 3 слева на фиг. 28). Если процесс доения завершен, то ворота 3b передней стороны открываются и животные снова могут выйти из доильного станка 3, как показано для четвертного станка 3 слева на фиг. 18.
Конечно, также возможна конструкция типа "елочка", в которой доильные станки 3 разделены перегородками 4. Это показано на фиг. 18, где изображен схематичный вид сверху варианта третьего варианта осуществления, выполненного согласно фиг. 3. На фиг. 3 доильные станки образованы перегородками 4, сложенными перед этим друг с другом так, что образуется проход для входа, причем сложенные друг с другом перегородки 4 образуют непрерывное ограждение этого входа. Если первое животное Ф доходит до конца доильной установки, образованного ограждением, которое подробно не показано и на фиг. 3 расположено под прямым углом, а на фиг. 18 - под углом, например, 45° к продольной оси входа, то первая перегородка 4 поворачивается по часовой стрелке до тех пор, пока она не будет проходить параллельно этому ограждению и не образует с ним первый доильный станок 3. Таким образом, все доильные станки образуются в результате соответствующего поворота друг за другом перегородок 4. Благодаря тому, что животные Ф стоят под углом, т.е. их воображаемые продольные оси проходят под углом к продольной оси входа, задние части животных Ф доступны для дояра M сбоку. На фиг. 18 этим боком является левый бок животного Т.
В случае доильных установок 1', выполненных согласно фиг. 3 и 18, перегородки 4 могут быть не сложены друг с другом, а расположены так, что они могут перемещаться вдоль своих продольных осей. На чертежах это не показано, но легко представимо при рассмотрении уже описанных доильных станков 3. Перед этим перегородки 4 вне области животных Ф уже были установлены так, чтобы они располагались параллельно, под прямым или непрямым углом относительно ограждения. Как только воображаемая продольная ось первого животного Ф располагается рядом с ограждением, первая перегородка 4 перемещается в направлении своей продольной оси в область животных Ф так, что она находится с другого бока животного Ф и образует доильный станок 3. При выходе из образованных таким образом доильных станков 3 ограждение открывается (поворачивается или перемещается в направлении своей продольной оси) и первое животное Ф может покинуть доильный станок 3. После этого первая перегородка 4 снова перемещается назад в направлении своей продольной оси, в свое исходное положение и т.д.
На фиг. 19 сверху схематично показан еще один вариант третьего варианта осуществления, выполненного согласно фиг. 3. Такую доильную установку 1" также называют установкой с последовательным расположением доильных станков. В этом случае доильные станки 3 расположены друг за другом последовательно, причем их узкие стороны отделены друг от друга траншеей G' для дояра M и соответственно имеют ограждения, например, решетки. Продольные стороны доильных станков 3 соответственно образуются, во-первых, из перегородки 4, а во-вторых, из состоящего из двух частей ограждения, выполненного в виде ворот 3а, 3b. Ворота 3а среднего доильного станка 3 распахнуты, чтобы впустить животное Ф в доильный станок 3, в то время как ворота 3b закрыты. В течение процесса доения закрыты как ворота 3а, так и ворота 3b. После доения ворота 3b, расположенные со стороны головы животного Т, открываются и животное Ф может покинуть доильный станок 3.
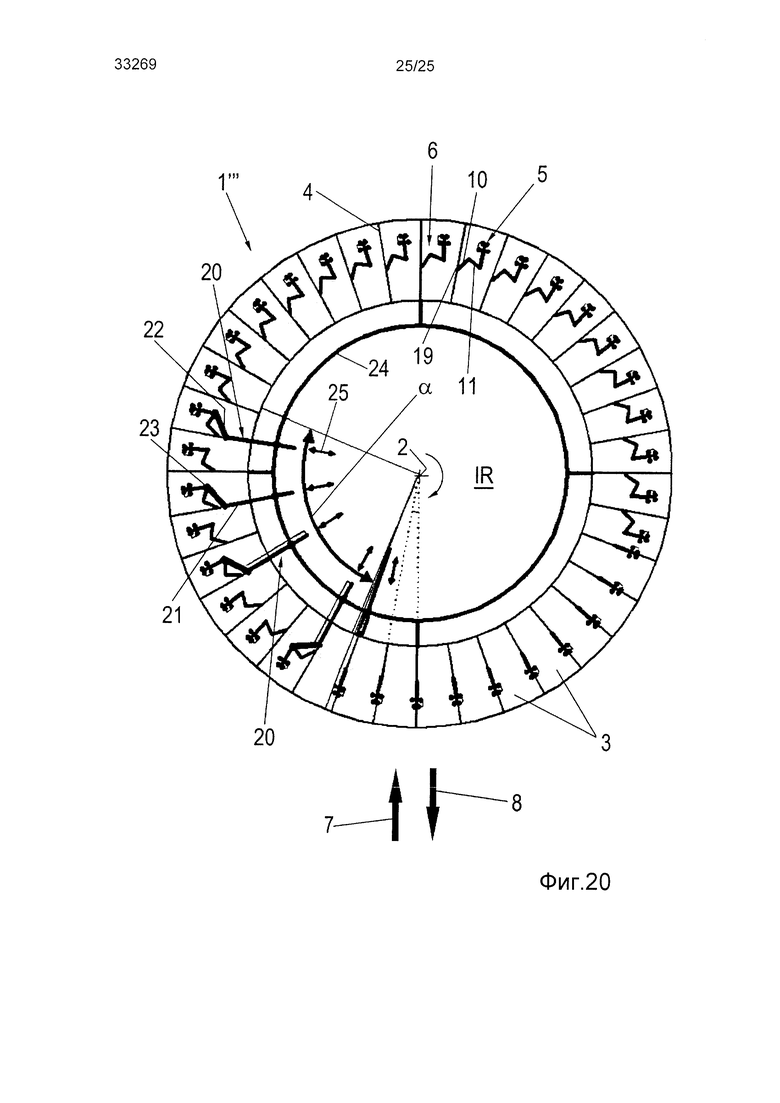
Наконец, на фиг. 20 доказан схематичный вид сверху первого варианта осуществления предлагаемой доильной установки 1'", содержащей роботизированное устройство 20.
Доильная установка 1'" представляет собой доильную карусель с доением снаружи, аналогичную карусели, описанной выше в связи с фиг. 1. Если животное Ф заняло свое предварительно заданное положение в доильном станке 3, то в круговом сегменте, который здесь обозначается как зона б установки, доильный аппарат 5 из исходного положения в перегородке 4 сбоку животного перемещается к подлежащему дойке животному в рабочее положение в предварительное положение, под вымя животного.
Для перемещения рычажного механизма 6 с доильным аппаратом 5 во внутреннем пространстве IR доильной установки 1'" предусмотрено наличие технических средств в виде роботизированного устройства 20, выполненного как внутренний робот. В этом варианте осуществления роботизированное устройство 20 содержит пять механических рук, каждая из которых имеет радиальную часть 21 и захватывающую руку 22 с захватной частью 23, которые могут перемещаться независимо друг от друга по направляющей 24. В этом варианте осуществления направляющая 24 расположена над доильными станками 3 за пределами досягаемости животных и защищена от загрязнения. В случае данной доильной установки 1, которая здесь выполнена в виде доильной карусели с центром 2 поворота, направляющая 24 расположена концентрически относительно круглой конструкции доильной карусели, с центром 2 поворота доильной карусели в качестве центра. Таким образом, при повороте доильной установки 1 механические руки также поворачиваются синхронно с этим поворотом. Поворот доильной установки 1 может поддерживаться и сохраняться непрерывно.
Это означает, что, как только животное входит в доильный станок 3, успокаивается и готово к доению, что может быть распознано, например, при помощи соответствующей сенсорной техники (например, камера, датчик перемещения, акустический датчик и т.д.) и исполнительных устройств (например, для выдачи и приема корма), механическая рука из исходного положения во внутреннем пространстве IR, в котором она не достает до доильных станков 3, перемещается в радиально наружном направлении 25, между двумя доильными станками 3, в область перегородки 4 в свое положение установки, захватывает доильный аппарат 5, находящийся в предварительном положении или положении захвата под выменем 26 (см. фиг. 13b) животного, и перемещает отпущенные доильные стаканы 5а к соскам 26а для установки (см. фиг. 13с). При этом позиционирование возможно благодаря датчику 13 положения, расположенному, например, на захватной части 23. Рычажный механизм 6 удерживает доильный станок 5, доильные стаканы которого установлены на сосках вымени 26. При этом механическая рука совершает только перемещение в радиальном направлении 25 непосредственно к доильному аппарату 5.
Сразу же после установки доильных стаканов 5а доильного аппарата механическая рука с ее захватной частью 23 отделяется от рычажного механизма 6 и перемещается в радиальном направлении 25 во внутреннее пространство IR назад в свое исходное положение. Рычажный механизм 6 удерживает доильный аппарат 5 и, следовательно, его вес, причем доильные стаканы 5а, установленные на соски вымени, создают нагрузку, которая меньше веса доильного аппарата 5 и рычажного аппарата 6, включая шланги. В течение этого процесса установки доильная карусель продолжает непрерывно поворачиваться, в данном случае по часовой стрелке, вокруг центра 2 поворота. Конечно, также возможен поворот против часовой стрелки. В процессе установки механическая рука (или другие механические руки) перемещается (перемещаются) по направляющей 24, предпочтительно в зоне б установки, с таким же направлением поворота и с такой же угловой скоростью, как доильная карусель. В этом варианте осуществления направляющая 24 расположена над доильными станками 3, за пределами досягаемости животных и защищена от загрязнения. Предпочтительно она закреплена на доильной установке 1, т.е. на ее движущейся части.
Рычажный механизм 6 имеет верхнее плечо 10 и нижнее плечо 11 или нижнее плечо, выполненное в виде держателя 5b доильного аппарата. Посредством конца верхнего плеча 10 он установлен и направлен с возможностью перемещения в подшипниковом узле 19 или, соответственно, в направляющем устройстве 18 в перегородке 4, с возможностью поворота вокруг вертикальной оси z1 (см. фиг. 6) и вертикального перемещения вдоль вертикальной оси z1 и, как описано выше, может приводиться в действие поворотным приводом 14 и вертикальным приводом 15. Рычажный механизм 6 предназначен для того, чтобы перемещать доильный аппарат 5 со сбалансированным весом, и должен иметь такой легкий ход, чтобы он мог следовать за перемещениями подлежащего дойке животного. Рычажный механизм 6 также может быть выполнен, как описано и показано на фиг. 13а-13с или 16а, 16b. Разумеется, в случае варианта осуществления в соответствии с фиг. 16а, 16b захватывающая рука 22 роботизированного устройства 20 соответствующим образом подогнана, что нетрудно представить себе.
Все доильные станки 3 на внешнем периметре доильной установки 1'" доступны снаружи для дояра М, так что он в любой момент времени может вмешаться в процесс доения. Поэтому в этой рабочей зоне дополнительные устройства отсутствуют. Напротив, механические руки работают только в ограниченной области внутреннего пространства IR. Таким образом, когда дояр M управляет всей доильной установкой 1'", осуществляет техническое обслуживание и вмешивается в ее работу, он не встречает никаких препятствий. Доильная карусель может продолжать поворачиваться даже тогда, когда необходимо ручное вмешательство дояра М, например, в случае отсоединения доильных стаканов 5а доильного аппарата 5.
После завершения процесса доения доильный аппарат 5 автоматически снимается с подлежащего дойке животного Ф или снова опускается сам в отсоединенное предварительное положение, а затем, как описано выше, снова поворачивается в исходное положение. Доильная карусель продолжает поворачиваться и в течение этого процесса.
Конечно, установку находящегося в предварительном положении доильного аппарата 5 сбоку, сзади или снизу (относительно животного) можно осуществить при помощи роботизированного устройства другой конструкции.
Изобретение не ограничивается представленными вариантами осуществления, при этом его можно модифицировать в рамках прилагаемой формулы изобретения.
Например, во втором варианте осуществления доильной установки 1' согласно фиг. 2 можно расположить несколько рядов расположенных рядом друг с другом доильных станков 3 - один за другим или даже в несколько этажей друг над другом.
В варианте осуществления датчик 13 положения, может быть выполнен в виде камеры, например, которая может также передавать изображения, отражающие состояние вымени подлежащего дойке животного и, таким образом, внести вклад в осведомленность относительно состояния здоровья подлежащего дойке животного.
Каждый доильный станок 3 можно активировать или блокировать отдельно. Доильную установку 1 можно продолжать эксплуатировать даже при заблокированных доильных станках 3, например, не требуется остановка доильной карусели.
Каждый доильный станок 3 можно подготовить для животного индивидуально, например, возможны различные предварительно заданные предварительные положения доильного аппарата 5 с рычажным механизмом 6. Иначе говоря, если устройство распознавания (например, RFID) опознает соответствующее животное, входящее в доильный станок 3, то в случае полуавтоматического варианта предварительная позиция доильного аппарата 5 может автоматически согласовываться с животным, ожидаемым в соответствующем доильном станке 3. Кроме того, в случае распознания животного может быть предпринято предварительное позиционирование доильных стаканов 5а в соответствии с размерами вымени распознанного животного.
Кроме того, каждый доильный станок 3 может иметь устройство для кормления.
Естественно, доильный аппарат можно использовать также для дойных животных, имеющих вымя с различным числом сосков, например, 2, 3 или 4.
Доильное устройство 1 в виде доильной карусели можно выполнить так, что в случае необходимости для доения определенного животного также могут последовать несколько поворотов на 360°. В этом случае, если животное доходит до выхода 8, то выход животного из доильного станка 3 предотвращается.
Ссылочные обозначения
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2590818C2 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2742310C2 |
| ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2013 |
|
RU2587561C2 |
| ДОИЛЬНАЯ УСТАНОВКА С ВНУТРЕННИМ РОБОТИЗИРОВАННЫМ УСТРОЙСТВОМ | 2013 |
|
RU2578613C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ ДОИЛЬНОЙ УСТАНОВКИ ДЛЯ АВТОМАТИЧЕСКОГО ДОЕНИЯ ДОЙНЫХ ЖИВОТНЫХ, ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2015 |
|
RU2650392C9 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ ДОИЛЬНОЙ УСТАНОВКИ АВТОМАТИЧЕСКОГО ДОЕНИЯ ДОЙНЫХ ЖИВОТНЫХ, ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2018 |
|
RU2753879C2 |
| Манипулятор доильной установки с управляемым режимом доения по четвертям вымени коровы | 2019 |
|
RU2715859C1 |
| БЛОКИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ДОИЛЬНОЙ КАРУСЕЛИ | 2009 |
|
RU2471342C2 |
| ДОИЛЬНЫЙ АППАРАТ И ДОИЛЬНАЯ УСТАНОВКА, СНАБЖЕННАЯ ТАКИМ ДОИЛЬНЫМ АППАРАТОМ | 2011 |
|
RU2556039C2 |
| МОЛОЧНО-ДОИЛЬНЫЙ КОМПЛЕКС | 2004 |
|
RU2267261C2 |
Доильная установка, которая имеет по меньшей мере один доильный станок и по меньшей мере одну перегородку, которая расположена с продольной стороны доильного станка. Перегородка содержит рычажный механизм с доильным аппаратом, который выполнен с возможностью перемещения из исходного положения в рабочее и обратно. Рычажный механизм расположен в перегородке и выполнен с возможностью перемещения в рабочее положение в доильный станок. Рычажный механизм выполнен с возможностью перемещения в полуавтоматическом режиме из исходного положения в рабочее, представляющее собой фиксированное предварительное положение, предварительно заданное упорными средствами. Доильные стаканы доильного аппарата в исходном положении и в предварительном положении удерживаются вертикально и вплотную друг к другу над коллектором. На расстоянии от коллектора доильные стаканы доильного аппарата выполнены с возможностью ограниченного разъединения из предварительного положения в положение доения, в котором стаканы могут ограниченно перемещаться, так, что в положении доения указанное расстояние между доильными стаканами аппарата и коллектором увеличено. Расстояние между доильным стаканом в исходном положении и в предварительном положении и коллектором определено по меньшей мере одним сегментным элементом, который расположен между доильным стаканом и коллектором. Сегментный элемент имеет канал, через который проведено по меньшей мере одно тянущее средство. Тянущее средство выполнено с возможностью натяжения в исходном положении и в предварительном положении при помощи исполнительного устройства. В исходном и предварительном положении доильный стакан удерживается в вертикальном положении над коллектором на расстоянии от коллектора. Использование данной группы изобретений обеспечивает увеличение производительности установки. 3 н. и 21 з.п. ф-лы, 32 ил.
1. Перегородка (4) доильной установки (1, 1′, 1″, 1′″) для по меньшей мере одного доильного станка (3) для доения дойных животных (Т), причем перегородка (4) расположена с продольной стороны доильного станка (3), содержит рычажный механизм (6, 6′) с доильным аппаратом (5), выполненный с возможностью перемещения из исходного положения в рабочее положение и обратно, в исходном положении рычажный механизм (6, 6′) с доильным аппаратом (5) расположен в перегородке (4) и выполнен с возможностью перемещения в рабочее положение в доильный станок,
причем рычажный механизм (6, 6′) выполнен с возможностью перемещения в полуавтоматическом режиме из исходного положения в рабочее положение, представляющее собой фиксированное предварительное положение, предварительно задаваемое упорными средствами,
причем доильные стаканы (5а) доильного аппарата (5) в исходном положении и в предварительном положении удерживаются вертикально и вплотную друг к другу над коллектором (27), на расстоянии от коллектора (27), доильные стаканы (5а) доильного аппарата (5) выполнены с возможностью ограниченного разъединения из предварительного положения в положение доения, в котором доильные стаканы (5а) доильного аппарата (5) могут ограниченно перемещаться, так что в положении доения указанное расстояние между доильными стаканами (5а) доильного аппарата (5) и коллектором (27) увеличено, а также с возможностью перемещения снова назад в предварительное положение,
причем указанное расстояние между каждым доильным стаканом (5а) в исходном положении и в предварительном положении и коллектором (27) соответственно определено по меньшей мере одним сегментным элементом (29), расположенным соответственно между каждым доильным стаканом (5а) и коллектором (27),
причем в указанном по меньшей мере одном сегментном элементе (29) имеется канал (29с), через который проведено по меньшей мере одно тянущее средство (31), которое на одном конце закреплено на соответствующем доильном стакане (4а), а на другом конце шарнирно соединено с исполнительным устройством (30),
отличающаяся тем, что указанное по меньшей мере одно тянущее средство (31) выполнено с возможностью натяжения в исходном положении и в предварительном положении при помощи исполнительного устройства (30), причем в исходном положении и в предварительном положении соответствующий доильный стакан (5а) доильного аппарата (5) удерживается в вертикальном положении над коллектором (27), на указанном расстоянии от коллектора (27).
2. Перегородка (4) по п. 1, отличающаяся тем, что рычажный механизм (6, 6′) выполнен с возможностью перемещения в автоматическом режиме из исходного положения в рабочее положение, в положение установки для автоматической установки доильного аппарата (5) на соски подлежащего дойке животного (Т), причем доильный аппарат (5) имеет по меньшей мере один датчик (13) положения.
3. Перегородка (4) по любому из пп. 1 и 2, отличающаяся тем, что коллектор (27) закреплен на держателе (5b) доильного аппарата, в соединении между коллектором (27) и держателем (5b) доильного аппарата, причем в исходном и предварительном положении указанное соединение прочно удерживается вместе, а в положении доения ослабляется.
4. Перегородка (4) по п. 3, отличающаяся тем, что в положении доения коллектор (27) ослаблен настолько, что он может перемещаться в определенных пределах относительно держателя (5b) доильного аппарата.
5. Перегородка (4) по любому из пп. 1, 2, 4, отличающаяся тем, что исполнительное устройство (30) представляет собой пневмоцилиндр, гидроцилиндр или электрический привод.
6. Перегородка (4) по любому из пп. 1, 2, 4, отличающаяся тем, что рычажный механизм (6, 6′) имеет верхнее плечо (10) и соединенное с ним, с возможностью поворота, нижнее плечо (11).
7. Перегородка (4) по п. 6, отличающаяся тем, что нижнее плечо (11) выполнено в виде держателя (5b) доильного аппарата с доильным аппаратом (5).
8. Перегородка (4) по любому из пп. 1, 2, 4, 7, отличающаяся тем, что рычажный механизм (6, 6′) соединен с узлом (9) привода, расположенным на перегородке (4) в верхней части перегородки (4), в частности за пределами досягаемости или выше подлежащего дойке животного (Т).
9. Перегородка (4) по любому из пп. 1, 2, 4, 7, отличающаяся тем, что рычажный механизм (6, 6′) соединен с узлом (9) привода, расположенным под доильной платформой (1b).
10. Перегородка (4) по любому из пп. 1, 2, 4, 7, отличающаяся тем, что в исходном положении рычажный механизм (6, 6′) с доильным аппаратом (5) расположен в перегородке (4), в отверстии (4е) облицовки (4d) перегородки (4).
11. Перегородка (4) по п. 10, отличающаяся тем, что отверстие (4е) в облицовке (4d) перегородки (4) выполнено с возможностью закрытия предохранительной крышкой, вместе с расположенным в нем в исходном положении рычажным механизмом (6, 6′, 6″, 6′″) с доильным аппаратом (5).
12. Перегородка (4) по п. 10, отличающаяся тем, что в перегородке (4) расположено устройство (17) для очистки доильного аппарата (5).
13. Перегородка (4) по любому из пп. 1, 2, 4, 7, отличающаяся тем, что рычажный механизм (6, 6′) имеет параллелограммный механизм для доильного аппарата (5).
14. Перегородка (4) по любому из пп. 1, 2, 4, 7, отличающаяся тем, что перегородка (4) вместе со своими функциональными узлами и компонентами образует предварительно собранный узел в комплекте.
15. Доильная установка (1, 1′, 1″, 1′″), которая имеет по меньшей мере один доильный станок (3) для доения дойных животных (Т) и по меньшей мере одну перегородку (4) по любому из пп. 1-14.
16. Доильная установка (1, 1′, 1″, 1′″), которая имеет по меньшей мере один доильный станок (3) для доения дойных животных (Т) и по меньшей мере одну перегородку (4) по любому из пп. 1-5, причем перегородка (4) расположена с продольной стороны доильного станка (3), содержит рычажный механизм (6′) с доильным аппаратом (5), выполненный с возможностью перемещения из исходного положения в рабочее положение в доильный станок (3) и обратно, и отличается тем, что в исходном положении рычажный механизм (6′) с доильным аппаратом (5) расположен под доильной платформой (1b) в той части перегородки (4), которая расположена под доильным станком (3), и в частности выполнен с возможностью перемещения в рабочее положение в доильный станок позади подлежащего дойке животного (Т), между или за его задними ногами.
17. Доильная установка (1, 1′, 1″, 1′″) по п. 16, отличающаяся тем, что рычажный механизм (6′) выполнен с возможностью перемещения в полуавтоматическом режиме из исходного положения в рабочее положение, причем рабочее положение представляет собой фиксированное предварительное положение, предварительно задаваемое упорными средствами, причем доильный аппарат (5) в предварительном положении находится в удобном для роботизированного устройства (20) положении.
18. Доильная установка (1, 1′, 1″, 1′″) по любому из пп. 16 и 17, отличающаяся тем, что рычажный механизм (6′) выполнен с возможностью поворота вокруг горизонтальной оси (34) из исходного положения в рабочее положение и обратно.
19. Доильная установка (1, 1′, 1″, 1′″) по любому из пп. 16 и 17, отличающаяся тем, что соединенный с рычажным механизмом (6′) доильный аппарат (5) может приводиться в контакт с устройством (17) для очистки в исходном положении рычажного механизма (6′).
20. Доильная установка (1, 1′, 1″, 1′″) по любому из пп. 16 и 17, отличающаяся тем, что соединенный с рычажным механизмом (6′) доильный аппарат (5) в исходном положении установлен вверх дном.
21. Доильная установка (1, 1′, 1″, 1′″) по любому из пп. 16 и 17, отличающаяся тем, что в перегородке (4) расположен по меньшей мере один узел (9) привода рычажного механизма (6′).
22. Доильная установка (1, 1′, 1″, 1′″) по любому из пп. 16 и 17, отличающаяся наличием по меньшей мере одного роботизированного устройства (20), предназначенного для установки доильного аппарата (5) из рабочего положения в предварительное положение на соски (26а) вымени (26) подлежащего дойке животного (Т).
23. Доильная установка (1, 1′, 1″, 1′″) по любому из пп. 16 и 17, отличающаяся тем, что она представляет собой доильную карусель.
24. Доильная установка (1, 1′, 1″, 1′″) по п. 23, отличающаяся тем, что доильная карусель представляет собой доильную карусель с доением снаружи.
| US 5596945 A, 28.01.1997 | |||
| Способ опрессовки пакера в скважине | 1978 |
|
SU848588A1 |
| СПОСОБ УСКОРЕНИЯ ПАРАМЕТРОВ РОСТА И УВЕЛИЧЕНИЯ УРОЖАЙНОСТИ ЛЮЦЕРНЫ | 2000 |
|
RU2185063C2 |
| EP 191517 B2, 20.08.1986. | |||

