Изобретение относится к измерительной технике и может быть использовано для регистрации изменения параметров давления в толще воды, вызываемого зарождением и прохождением волны цунами.
Известен способ определения возникновения волн цунами [см. ДАН АН СССР, т.257, №5, стр.1088-1092], основанный на измерении гидростатического давления датчиком, установленным на глубине более 100 м в прибрежной зоне, причем вариации давления (уровень моря) преобразуются в частотно-модулированный сигнал, в нескольких диапазонах береговой сейсмостанцией. При возникновении первого максимума, амплитуда которого превышает фон, принимается решение о появлении цунами.
Недостатком этого способа является неоднозначность информации и, как следствие, неоднозначность прогноза и предупреждения о появлении цунами, небольшое время для принятия мер безопасности.
Наиболее близким по технической сущности и достигаемому положительному эффекту к заявляемому способу является способ установки цунамигенности подводного землетрясения [см. AC SU №1584585, МПК G01M 01/00], включающий измерение на сейсмостанции сигнала землетрясения, определение эпицентральной области и магнитуды землетрясения, запись генерируемых землетрясением гидроакустических сигналов гидрофонами, расположенными в подводном звуковом канале, передачу их на береговые станции и далее, по радиоканалу на сейсмические станции, осуществление на сейсмической станции спектрального анализа гидроакустических сигналов и при превышении сигналом фоновых величин в диапазоне (100-400 Гц) принятие решения о цунамигенности землетрясения. Недостатком данного способа является отсутствие оценки вектора скорости перемещения волны цунами, оценки энергетических параметров волны, невысокая достоверность принятия решения о возникновении цунами и нахождения его эпицентра.
Таким образом, основными недостатками прототипа являются: отсутствие оценки вектора скорости перемещения волны цунами, оценки энергетических параметров волны, невысокая достоверность принятия решения о возникновении цунами и нахождения его эпицентра.
Задачей изобретения является получение оценок вектора скорости перемещения волны цунами, оценок энергетических параметров волны и на этой основе повышение достоверности принятия решения о возникновении цунами и определения эпицентра возникновения волны.
Поставленная задача достигается тем, что способ установки цунамигенности подводного землетрясения, заключающийся в том, что на сейсмостанции осуществляют регистрацию сигнала землетрясения, определяют эпицентральную область и магнитуду землетрясения, осуществляют прием генерируемых землетрясением гидроакустических сигналов гидрофонами, расположенными в подводном положении, осуществляют передачу информации о цунами по радиоканалу, дополняют регистрацией сигналов подводного землетрясения распределенной системой придонных сейсмодатчиков, приведением в стробированный по времени режим ожидания распределенной системы гидрофонов, фиксацией, распределенной системой гидрофонов, сигналов прихода гидроакустической волны, фиксацией, в определенный расчетный промежуток времени, сигналов изменения давления воды пространственно распределенной системой датчиков давления воды, определением по сигналам группы гидрофонов, датчиков давления воды и их координатам азимутального направления фронта гидроволны и волны цунами, энергетических параметров волны цунами, эпицентра возникновения волны цунами и временных характеристик, связанных с прогнозом движения волны цунами.
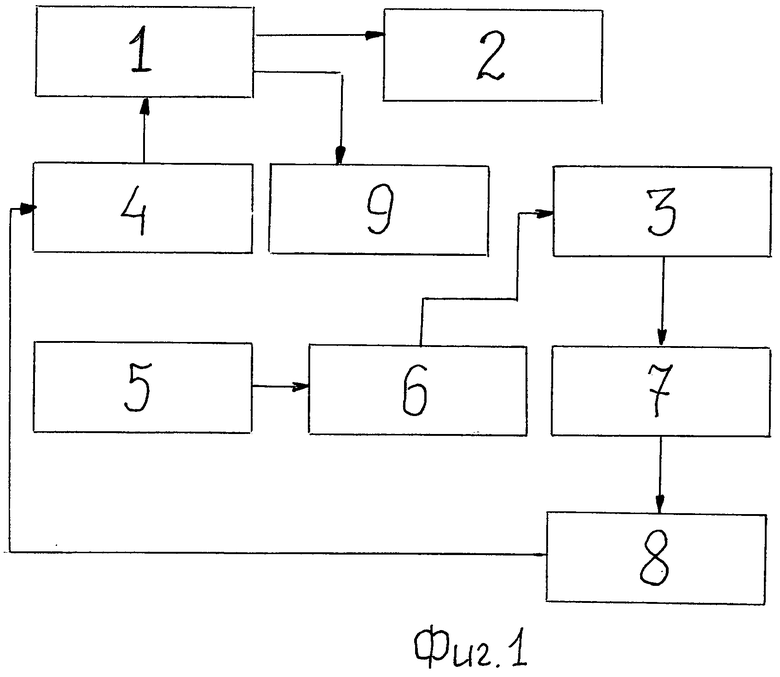
Предлагаемый способ можно пояснить с помощью структурной схемы - Фиг.1. На схеме представлены составляющие действий и их взаимосвязи для понимания существа предложенного. На схеме цифрами обозначены позиции, связанные с определенными действиями.
Исходя из цифровых обозначений на данной схеме, позиции, связанные с совокупностью действий, в предлагаемом способе можно представить следующим образом:
1 - Позиция 1: на сейсмостанции осуществляют регистрацию сигнала землетрясения. 2 - Позиция 2: определяют эпицентральную область и магнитуду землетрясения. 3 - Позиция 3: осуществляют прием генерируемых землетрясением гидроакустических сигналов гидрофонами, расположенными в подводном положении. 4 - Позиция 4: передача информации о цунами по радиоканалу. Новым является: 5 - Позиция 5: определение факта и времени землетрясения, по фиксации сигналов прихода акустической волны, распределенной системой придонных сейсмодатчиков. 6 - Позиция 6: приведение в стробированный по времени режим ожидания распределенной системы гидрофонов. 7 - Позиция 7: фиксация, распределенной системой гидрофонов, сигналов, свидетельствующих о факте и времени прихода гидроакустической волны. 8 - Позиция 8: фиксация, в определенный расчетный промежуток времени, сигналов, свидетельствующих о факте и времени изменения давления воды, вследствие прохождения волны цунами, пространственно распределенной системой датчиков давления воды. 9 - Позиция 9: определение по совокупности сигналов распределенной группы гидрофонов, датчиков давления воды и их координатам азимутального направления фронта гидроволны энергетических параметров волны цунами, эпицентра цунами и временных характеристик, связанных с прогнозом движения волны цунами.
Предлагаемый способ прогноза возможности возникновения цунами и определения его эпицентра состоит в следующем. Предполагается повысить достоверность прогноза возможности возникновения цунами за счет параллельной и взаимной обработки сигналов различных процессов и физических величин, обусловленных возможностью появления и самим появлением цунами. Среди возможных процессов можно использовать процессы, связанные с сейсмическими волнами и гидроакустическими волнами сейсмического и несейсмического происхождения, а из физических величин можно использовать гидростатическое давление. Обнаружение требуемых сигналов можно представить в виде этапов. На первом этапе осуществляется обнаружение сейсмических волн, которые появляются при подводном землетрясении - предвестнике цунами (Позиции 1, 2 и 5). Приоритет обнаружения сейсмических волн обусловлен высокой скоростью их распространения (V=8,1 км/с) в придонном слое по сравнению со скоростью распространения гидроакустической волны (V=1,5 км/с) сейсмического происхождения. Причинами образования сейсмической волны могут быть также подводные взрывы, извержение подводных вулканов и землетрясения вблизи побережья океанов. Если в сейсмодатчике, расположенном на дне океана, принятые сигналы превышают фон, то с момента появления сейсмической волны, опережающей по времени появление гидроакустической волны при подводном землетрясении, формируют стробирующий по времени сигнал и фиксируют время появления гидроакустической волны - t1 (Позиция 6, 7). Поскольку энергия сейсмической волны, как правило, преобладает над энергией гидроакустической волны сейсмического происхождения, то это позволяет повысить достоверность прогноза предлагаемого способа по сравнению с прототипом. Очевидно, что не всякое подводное землетрясение, а также выше перечисленные факторы, являющиеся источником образования сейсмической волны, приводят к образованию волн цунами. Поэтому в предлагаемом способе на первом этапе система подводного мониторинга цунами переводится в режим ожидания. На втором этапе производят прием гидроакустической волны группой вертикально расположенных гидрофонов, которые в совокупности можно отождествить как векторный датчик (Позиция 3, 7). При превышении амплитуды вектора фоновых значений после появления стробирующего сигнала (t1), принимается решение о возможности появления волны цунами и фиксируется момент превышения амплитуды вектора фоновых значений (Позиция 7). Обнаружение принятой гидроакустической волны с помощью векторного датчика (группы гидрофонов) сопровождается измерением азимута фронта гидроакустической волны. Подсчитывается разность Δt=t2-t1. По этой разности, при известных скоростях распространения гидроакустической и акустической волн, по заранее подготовленной зависимости D, H=f(Δt), исходя из априорных сведений, производится оценка дальности D и глубины Н океана в эпицентре подводного землетрясения. Зависимость D, H=f(Δt) подготавливают следующим образом. Поскольку рельеф дна в определенной акватории океана известен, то рельеф дна представляют в виде массива данных, с координатной привязкой к датчику, в сферической системе координат. Для измеренного азимута и конкретного рельефа дна, в заданном диапазоне дальностей, отсчитывается расстояние по лучу от эпицентра источника излучения до места расположения векторного датчика, до которого приходит гидроакустическая волна после многократного переотражения от поверхности и дна океана. Затем отсчитываются текущие дальности и соответствующая глубина в месте расположения источника излучения сигналов. За начало отсчета принимается место расположения придонного сейсмодатчика. При известных скоростях распространения акустической и гидроакустической волн рассчитываются времена t1 и t2 и строится зависимость D, H=f(Δt). Такие же зависимости строятся и для других азимутальных секторов. Поскольку в придонном слое сейсмическая волна имеет одну трассу распространения и, следовательно, имеет однозначный отсчет дальности, то определенной разности Δt соответствует определенная трасса распространения гидроакустической волны. На третьем этапе производится регистрация изменения гидростатического давления от глубины датчиками давления воды, равномерно расположенными от дна до поверхности океана в месте расположения придонного сейсмодатчика (Позиция 8). При превышении уровней давления фоновых значений производится регистрация уровней, определяющих во времени распределение фазового фронта волны в вертикальной плоскости. Это измерение также отражает тот факт, что обнаружение сигнала группой гидрофонов не случайно и подтверждено другим средством, производящим регистрацию процесса иной физической природы. Проведя оценку дальности и глубины океана, прогнозируется время t3 начала появления сигнала от прохождения волны цунами и выставляется второй стробирующий временной сигнал с поправкой на опережение, учитывая допустимые ошибки оценки величин D и Н. При превышении амплитуды сигналов фоновых значений в третьем стробе принимается решение о появлении цунами. Координата азимута перемещения фронта волны, амплитуды сигналов гидрофонов и датчиков давления, принадлежащих цунами, вместе с координатами гидробуя, соответствующего придонному сейсмодатчику, группе гидрофонов и датчиков давления, передаются по радиоканалу на сейсмостанцию (Позиция 4). Такие же измерения осуществляют на других гидробуях с соответствующими датчиками, которые располагают в акватории океана на расстояниях 50-500 км друг от друга, охватывая собой по периферии цунамигенную зону. При известных скоростях распространения гидроакустической и акустической волн, зная время появления сигнала от волны цунами t3, производят расчет начала образования цунами tн. (Позиция 9). При перемещении волн цунами от эпицентра в виде концентрических окружностей рассчитывают ширину волны L в заданном направлении, которая при скорости перемещения волны вдали от побережья:
 , где g - ускорение силы тяжести; Н - средняя глубина океана; зависит от координат начала ее зарождения. Определяют среднюю амплитуду по всем измеренным каналам, по которой судят о высоте волны цунами h. Рассчитывают объем и массу волны цунами по формулам: V=hλL (км3), где λ - длина волны цунами; m=109V (т) (Позиция 9).
, где g - ускорение силы тяжести; Н - средняя глубина океана; зависит от координат начала ее зарождения. Определяют среднюю амплитуду по всем измеренным каналам, по которой судят о высоте волны цунами h. Рассчитывают объем и массу волны цунами по формулам: V=hλL (км3), где λ - длина волны цунами; m=109V (т) (Позиция 9).
Использование предлагаемого способа позволит наиболее достоверно и заблаговременно оповестить население цунамигенных прибрежных районов и принять необходимые предупредительные меры.
Для реализации способа прогноза возможности возникновения цунами и определения его эпицентра предлагается «Устройство для прогноза возможности возникновения цунами и определения его эпицентра», которое отличается от устройства, используемого в «Способе установки цунамигенности подводного землетрясения» - прототипе [см. AC SU №1584585, МПК G01M 01/00]. Устройство прототипа, содержащее N пространственно распределенных подводных каналов с гидрофонами, выход каждого из которых через подводный звуковой гидроканал соединен с входом береговой станции, выход которой через радиоканал соединен с входом наземной сейсмостанции, остальные входы которой также соединены с выходами распределенной группы наземных сейсмодатчиков, не позволяет получать оценки вектора скорости перемещения волны цунами, оценки энергетических параметров волны, что приводит к невысокой достоверности принятия решения о возникновении цунами и нахождения его эпицентра.
Задачей изобретения является устранение указанных недостатков и реализация предлагаемого способа прогноза возможности возникновения цунами и определения его эпицентра. Поставленная задача достигается тем, что в устройство, содержащее N пространственно распределенных подводных каналов с гидрофонами, радиоканал, связанный с сейсмостанцией, сейсмостанцию, входы которой соединены с распределенной группой наземных сейсмодатчиков, дополнительно введены, в каждый из N пространственно распределенных подводных каналов с гидрофонами, связанная группа отделяемых гидробуев с модулем радиосвязи, кабель-трос нейтральной плавучести, модуль энергообеспечения и обработки данных, первая вертикальная группа гидрофонов, первый датчик давления воды, вторая вертикальная группа гидрофонов, второй датчик давления воды, третий датчик давления воды, придонный сейсмодатчик, при этом выход каждого отделяемого гидробуя с модулем радиосвязи связан с входом радиоканала, а вход связан с кабель-тросом нейтральной плавучести, который также связан с модулем энергообеспечения и обработки данных, гидрофоном, первой вертикальной группой гидрофонов, первым датчиком давления воды, второй вертикальной группой гидрофонов, вторым датчиком давления воды, третьим датчиком давления воды, придонным сейсмодатчиком.
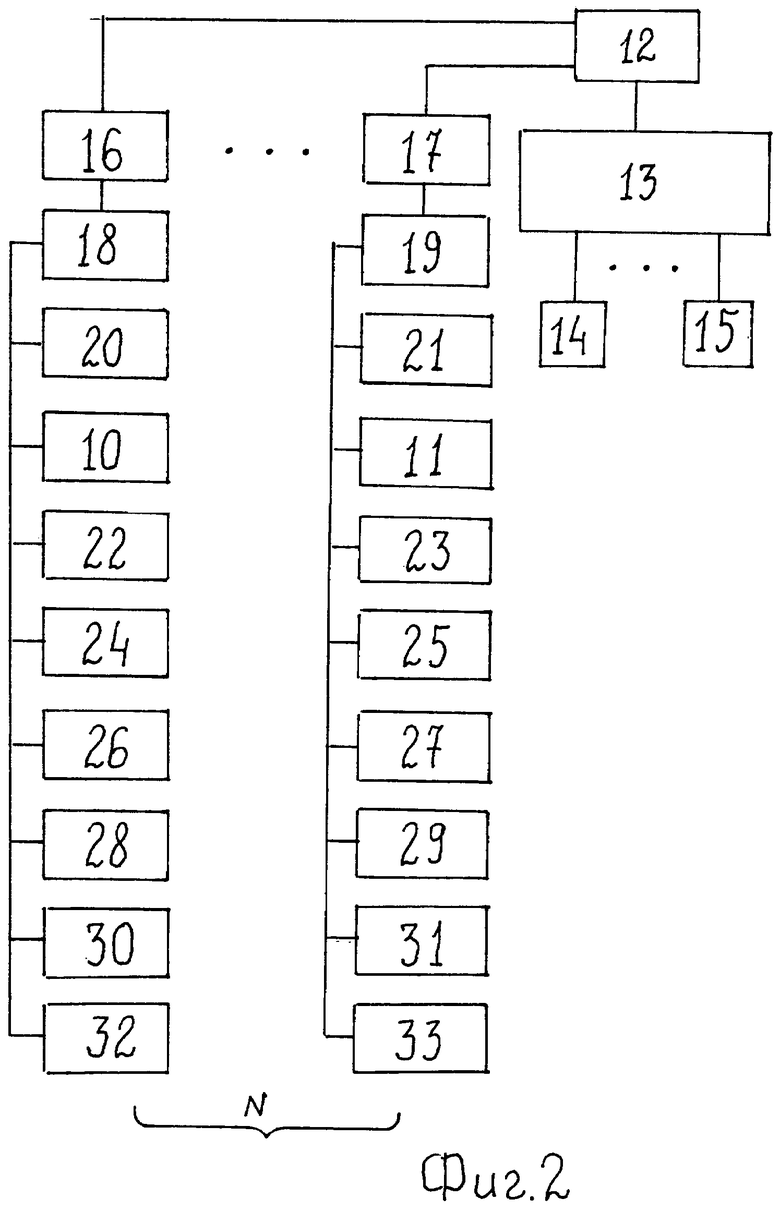
Структура предлагаемого устройства представлена на Фиг.2. На Фиг.2 обозначены: 10; 11 - гидрофоны N пространственно распределенных подводных каналов; 12 - радиоканал; 13 - сейсмостанция; 14; 15 - сейсмодатчики; 16; 17 - отделяемые гидробуи с модулем радиосвязи; 18; 19 - кабель-трос нейтральной плавучести; 20; 21 - модуль энергообеспечения и обработки данных; 22; 23 - первая вертикальная группа гидрофонов; 24; 25 - первый датчик давления воды; 26; 27 - вторая вертикальная группа гидрофонов; 28; 29 - второй датчик давления воды; 30; 31 - третий датчик давления воды; 32; 33 - придонный сейсмодатчик.
Устройство работает следующим образом. Сейсмодатчиками 14; 15; 32; 33 регистрируется факт землетрясения, которое может привести к образованию цунами. Сигнал от придонных сейсмодатчиков 32; 33 приводит систему гидрофонов 10; 11; 22; 23; 26; 27 и датчиков давления воды 24; 25; 28; 29; 30; 31 в режим ожидания. В модуль энергообеспечения и обработки данных 20; 21 по кабель-тросу 18; 19 поступает сигнал для начала формирования временного строба с целью определения разности времени прихода акустической и гидроакустической волн. При проходе гидроакустической волны системой гидрофонов 10; 11; 22; 23; 26; 27 фиксируется ее обнаружение и время прихода. В модуле энергообеспечения и обработки данных 20; 21 определяется азимутальное направление вертикального фронта гидроволны, разность времени прихода акустической и гидроакустической волны, производится оценка дальности (в измеренном азимутальном направлении фронта гидроволны) до эпицентра подводного землетрясения и глубины океана в эпицентре подводного землетрясения, на основе априорных параметров, заложенных в базу данных модуля энергообеспечения и обработки данных 20; 21 о рельефе морского дна. На основе полученных оценок дальности и глубины океана в эпицентре цунами производится расчет прогнозируемого времени появления волны цунами над датчиками давления воды 24; 25; 28; 29; 30; 31. Формируется второй временной стробирующий сигнал с учетом поправки времени на расчеты и допустимыми ошибками вышеприведенных оценок. При превышении амплитуды сигнала фоновых значений в датчиках давления воды, в установленном временном стробе, принимается решение о появлении цунами. Происходит отделение одного из буев, связанной группы отделяемых буев с модулем радиосвязи 16; 17, и на наземную сейсмостанцию 13, через радиоканал 12 передаются: оценка координаты азимута движения волны цунами, амплитуды сигналов датчиков давления воды 24; 25; 28; 29; 30; 31, свидетельствующих о высоте волны цунами, распределение фазового фронта акустической волны от эпицентра цунами, зафиксированные группой гидрофонов 10; 11; 22; 23; 26; 27, и координаты гидробуя. На основе этой информации, а также информации, полученной от других гидробуев, с соответствующей аппаратурой, размещенных в океане, на сейсмостанции 13 осуществляются интегрированные расчеты энергетических и временных параметров волны цунами, осуществляется оповещение объектов на побережье, куда прогнозируется и где ожидается приход волны цунами.
Как показывают расчеты, если гидробуи с аппаратурой, в количестве 5-7 штук, размещаются на расстоянии 50-150 км от линий тектонического разлома и зон подводной вулканической активности, выработка окончательного сигнала на оповещение о цунами, с высокой степенью достоверности, будет составлять не более 19-20 минут после цунамигенного подводного землетрясения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ВОЛН ЦУНАМИ, ПРИМЕНИМЫЙ ДЛЯ ВСЕХ ПРИЧИН ИХ ВОЗБУЖДЕНИЯ | 1999 |
|
RU2156988C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2457514C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКОВ СИЛЬНЫХ ЗЕМЛЕТРЯСЕНИЙ И ЦУНАМИ | 2008 |
|
RU2413249C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМОЖНОСТИ НАСТУПЛЕНИЯ КАТАСТРОФИЧЕСКИХ ЯВЛЕНИЙ | 2011 |
|
RU2462734C1 |
| СПОСОБ УСТАНОВЛЕНИЯ ЦУНАМИГЕННОСТИ ПРОИСШЕДШЕГО ПОДВОДНОГО ЗЕМЛЕТРЯСЕНИЯ | 1988 |
|
SU1584585A1 |
| БУЙКОВАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКОВ СИЛЬНЫХ ЗЕМЛЕТРЯСЕНИЙ И ЦУНАМИ | 2008 |
|
RU2410725C2 |
| КАБЕЛЬНАЯ ДОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКОВ СИЛЬНЫХ ЗЕМЛЕТРЯСЕНИЙ | 2008 |
|
RU2395822C2 |
| ДРЕЙФУЮЩАЯ БУЙКОВАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКОВ СИЛЬНЫХ ЗЕМЛЕТРЯСЕНИЙ И ЦУНАМИ | 2008 |
|
RU2405176C2 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМОСИГНАЛОВ НА АКВАТОРИИ МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270464C1 |
Изобретение относится к области геофизики и может быть использовано для прогнозирования возможности возникновения цунами и определения его эпицентра. Сущность: устройство для осуществления способа включает сейсмостанцию, пространственно распределенные подводные каналы с гидрофонами, связанный с сейсмостанцией радиоканал. В каждый из пространственно распределенных подводных каналов с гидрофонами введены: связанная группа отделяемых гидробуев с модулями радиосвязи, кабель-трос нейтральной плавучести, модуль энергообеспечения и обработки данных, две вертикальные группы гидрофонов, три датчика давления воды, придонный сейсмодатчик. На сейсмостанции регистрируют сигнал землетрясения. Определяют эпицентральную область и магнитуду землетрясения. Принимают генерируемые землетрясением гидроакустические сигналы гидрофонами, расположенными в подводном положении. Передают информацию о цунами по радиоканалу. Кроме того, регистрируют сигналы подводного землетрясения распределенной системой придонных сейсмодатчиков. Приводят в стробированный по времени режим ожидания распределенную систему гидрофонов. Фиксируют распределенной системой гидрофонов сигналы прихода гидроакустической волны. Фиксируют в определенный расчетный промежуток времени сигналы изменения давления воды пространственно распределенной системой датчиков давления воды. Определяют по сигналам группы гидрофонов, датчиков давления воды и их координатам азимутальное направление фронта гидроволны и волны цунами, энергетические параметры волны цунами, эпицентр возникновения волны цунами и временные характеристики, связанные с прогнозом движения волны цунами. Технический результат: повышение достоверности прогноза возможности возникновения цунами и определения его эпицентра. 2 н.п. ф-лы, 2 ил.
1. Способ прогноза возможности возникновения цунами и определения его эпицентра, заключающийся в том, что на сейсмостанции осуществляют регистрацию сигнала землетрясения, определяют эпицентральную область и магнитуду землетрясения, осуществляют прием генерируемых землетрясением гидроакустических сигналов гидрофонами, расположенными в подводном положении, осуществляют передачу информации о цунами по радиоканалу, отличающийся тем, что дополнительно осуществляют регистрацию сигналов подводного землетрясения распределенной системой придонных сейсмодатчиков, приводят в стробированный по времени режим ожидания распределенную систему гидрофонов, фиксируют распределенной системой гидрофонов сигналы прихода гидроакустической волны, фиксируют в определенный расчетный промежуток времени сигналы изменения давления воды пространственно распределенной системой датчиков давления воды, определяют по сигналам группы гидрофонов, датчиков давления воды и их координатам азимутальное направление фронта гидроволны и волны цунами, энергетические параметры волны цунами, эпицентр возникновения волны цунами и временные характеристики, связанные с прогнозом движения волны цунами.
2. Устройство для прогноза возможности возникновения цунами и определения его эпицентра, содержащее N пространственно распределенных подводных каналов с гидрофонами, радиоканал, связанный с сейсмостанцией, сейсмостанцию, входы которой соединены с распределенной группой наземных сейсмодатчиков, отличающееся тем, что дополнительно введены в каждый из N пространственно распределенных подводных каналов с гидрофонами связанная группа отделяемых гидробуев с модулем радиосвязи, кабель-трос нейтральной плавучести, модуль энергообеспечения и обработки данных, первая вертикальная группа гидрофонов, первый датчик давления воды, вторая вертикальная группа гидрофонов, второй датчик давления воды, третий датчик давления воды, придонный сейсмодатчик, при этом выход каждого отделяемого гидробуя с модулем радиосвязи связан с входом радиоканала, а вход связан с кабель-тросом нейтральной плавучести, который также связан с модулем энергообеспечения и обработки данных, гидрофоном, первой вертикальной группой гидрофонов, первым датчиком давления воды, второй вертикальной группой гидрофонов, вторым датчиком давления воды, третьим датчиком давления воды, придонным сейсмодатчиком.
| СПОСОБ УСТАНОВЛЕНИЯ ЦУНАМИГЕННОСТИ ПРОИСШЕДШЕГО ПОДВОДНОГО ЗЕМЛЕТРЯСЕНИЯ | 1988 |
|
SU1584585A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦУНАМИ | 2007 |
|
RU2362190C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2005 |
|
RU2292569C1 |
| Винокуров Л.В | |||
| Прогноз и предупреждение удара цунами / Горный информационно-аналитический бюллетень (научно-технический журнал), 2007, №7, с.242-248. | |||

