ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение заключает в себе автоматизированную систему кормления животных, автоматизированный способ кормления животных и устройство. Изобретение также заключает в себе способы трансформации поведения животных.
УРОВЕНЬ ТЕХНИКИ
Были разработаны различные системы для автоматизированного управления животными. Например, в промышленном животноводстве существует потребность в эффективном управлении большими стадами коров, овец и тому подобное для обеспечения правильного кормления животных и отсутствия заболеваний. Для достижения данных задач были разработаны автоматизированные системы, в которых отдельных животных маркируют таким образом, чтобы их можно было отслеживать с использованием системы идентификации животных. Таким образом, можно идентифицировать отдельных животных и отслеживать их ключевые признаки для обеспечения, чтобы они находились в наилучшем состоянии для отгрузки и конечного забоя.
В технической области исследования корма животных можно подвергать протоколам исследования вкусов, в которых необходимо, чтобы у них имелся доступ к одному или более кормам в количествах, более чем достаточных для поддержания нормальной массы тела. Животные, такие как собаки, получая на выбор множество кормов в больших количествах, будут потреблять больше корма, чем необходимо для поддержания их здоровой массы тела и, следовательно, с течением времени станут весить больше нормы или страдать ожирением. Чтобы этого избежать, необходимо ограничение общей доступности кормов. Однако исследование вкусов, как например исследование предпочтений, будет считаться неполноценным, если будет ограничена общая доступность корма. Вследствие этого, необходимо средство для предоставления точных и обоснованных протоколов исследования вкусов для животных. Важно, чтобы протоколы были выполнены с возможностью управления доступом к кормам для животных безопасным и удобным образом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение заключает в себе автоматизированное средство взаимодействия с животным с целью кормления, сбора данных, трансформации поведения и обучения без вмешательства человека. В некоторых вариантах осуществления, изобретение заключает в себе способ безопасного управления взаимодействием между машиной и животными в автоматизированной системе кормления и сбора данных. Автоматизация обеспечивает достижение высокого уровня точности вместе с возможностью отслеживания и управления доступом к корму.
В одном варианте осуществления, изобретение заключает в себе автоматизированную систему кормления животных, которая включает в себя, по меньшей мере, один контейнер для корма и составные элементы системы, содержащие:
(a) систему идентификации животных для идентификации животного, которое пользуется системой кормления; и
(b) блок обнаружения для обнаружения присутствия животного, расположенного около, по меньшей мере, одного контейнера для корма;
(c) ограждение для предотвращения доступа к, по меньшей мере, одному контейнеру для корма;
при этом составными элементами системы управляют посредством контроллера.
Изобретение может дополнительно содержать устройство для измерения присутствия животного, расположенного около, по меньшей мере, одного контейнера для корма, устройство подачи команды для предоставления команды животному, пользующемуся системой кормления, покинуть, по меньшей мере, один контейнер для корма и стимулирующее устройство для подачи стимулирующего воздействия животному, расположенному около, по меньшей мере, одного контейнера для корма. Устройство для измерения присутствия животного, расположенного около, по меньшей мере, одного контейнера для корма, может быть аналогичным блоку обнаружения для обнаружения присутствия животного, расположенного около, по меньшей мере, одного контейнера для корма. По меньшей мере, один контейнер для корма и составные элементы системы могут быть интегрированы общепризнанным способом в откормочной площадке.
В еще одном варианте осуществления, изобретение предоставляет автоматизированный способ кормления животных, причем способ содержит этапы, на которых:
(a) предоставляют, по меньшей мере, один контейнер для корма;
(b) предоставляют корм для животного в, по меньшей мере, одном контейнере для корма;
(c) предоставляют ограждение для предотвращения доступа животного к корму;
(d) обнаруживают, находится ли животное около, по меньшей мере, одного контейнера для корма;
если нет, (i) используют ограждение для предотвращения доступа к корму;
если да, (ii) направляют животное посредством подачи стимулирующего воздействия и повторяют этап (d) до тех пор, пока животное не окажется около, по меньшей мере, одного контейнера для корма; при этом этапом (d) управляют посредством контроллера. Изобретение может дополнительно содержать идентификацию животного, присутствующего в, по меньшей мере, одном контейнере для корма, измерение параметра животного в, по меньшей мере, одном контейнере, и предоставление животному команды покинуть, по меньшей мере, один контейнер для корма.
В еще одном варианте осуществления, изобретение заключает в себе систему кормления животных для оказания воздействия на трансформацию поведения нечеловекообразного животного, содержащую:
(a) систему идентификации животных для идентификации животного, которое пользуется системой кормления;
(b) ограждение для предотвращения доступа к, по меньшей мере, одному контейнеру для корма;
(d) устройство подачи команды для предоставления команды животному, пользующемуся системой кормления, с целью выполнения некоторого действия;
(e) блок обнаружения для обнаружения выполнило ли животное, пользующееся системой кормления, некоторое действие; и
(f) стимулирующее устройство для подачи стимулирующего воздействия животному, расположенному около, по меньшей мере, одного контейнера для корма;
при этом составными элементами системы управляют посредством контроллера. Изобретение может дополнительно содержать устройство для измерения параметра животного в, по меньшей мере, одном контейнере для корма.
В еще одном варианте осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, содержащий этапы, на которых:
(a) идентифицируют подопытное животное для трансформации поведения с использованием системы идентификации животных, ассоциированной с контейнером для корма,
(b) предоставляют команду животному, пользующемуся системой кормления, с целью выполнения некоторого действия; и
(c) обнаруживают, выполнило ли животное, пользующееся системой кормления, некоторое действие;
при этом составными элементами системы управляют посредством контроллера. Изобретение может дополнительно содержать измерение параметра животного в, по меньшей мере, одном контейнере для корма и подачу стимулирующего воздействия животному, расположенному около, по меньшей мере, одного контейнера для корма, (i) с целью заставить животное, пользующееся системой кормления, выполнить некоторое действие или (ii) как только выполнено некоторое действие.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
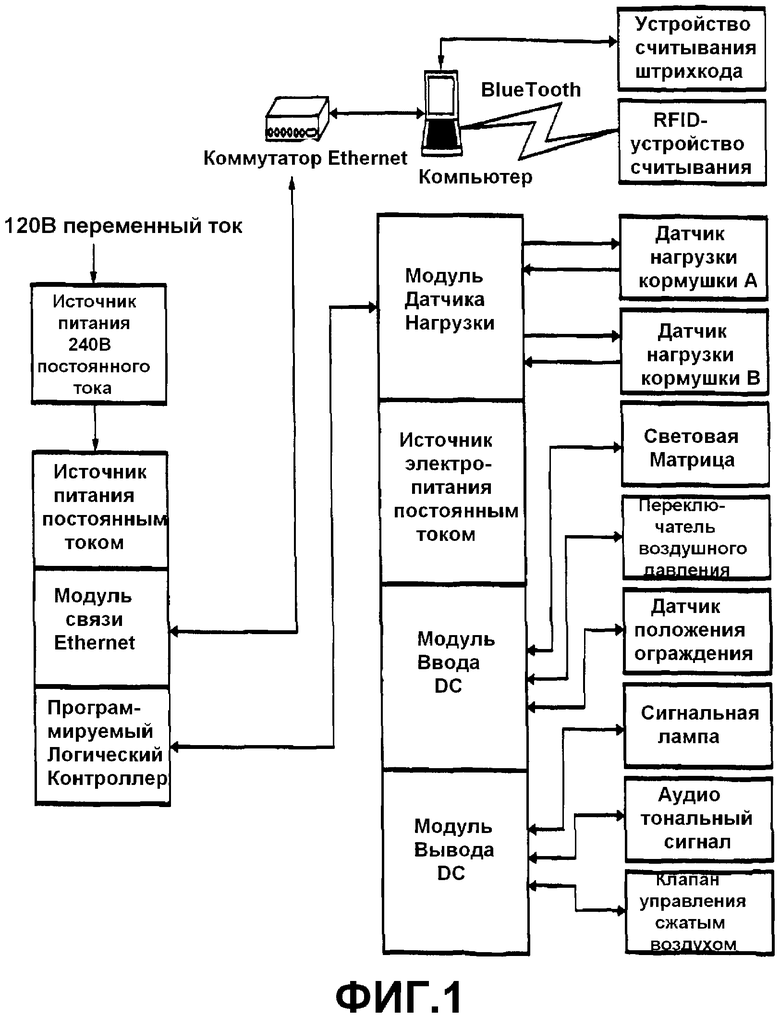
Фиг.1 показывает блок-схему системы управления автоматизированной системы кормления согласно изобретению; а
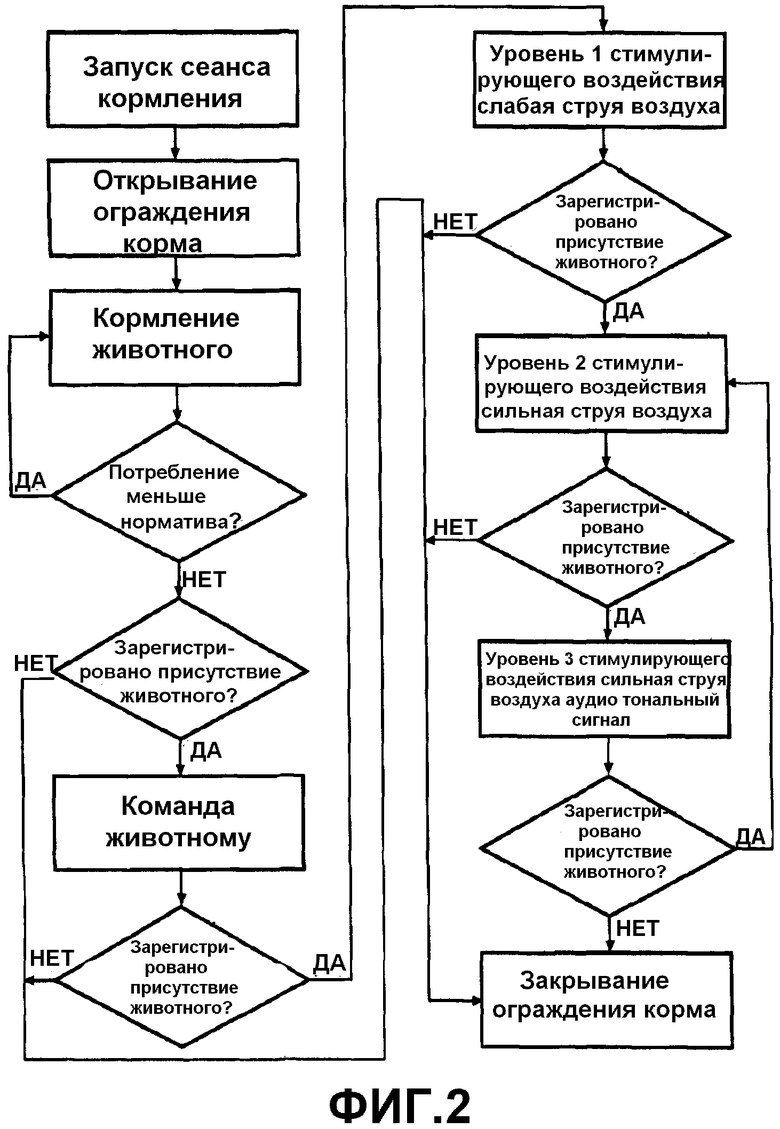
фиг.2 показывает схему последовательности операций способа кормления животных в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Общее описание изобретения
Изобретение заключает в себе автоматизированную систему кормления животных, которая содержит, по меньшей мере, один контейнер для корма и составные элементы системы, содержащие:
(a) систему идентификации животных для идентификации животного, которое пользуется системой кормления;
(b) блок обнаружения для обнаружения присутствия животного, расположенного около, по меньшей мере, одного контейнера для корма; и
(c) ограждение для предотвращения доступа, по меньшей мере, к одному контейнеру для корма; при этом составными элементами системы управляют посредством контроллера. Изобретение может дополнительно содержать устройство для измерения параметра животного в, по меньшей мере, одном контейнере для корма, устройство подачи команды для предоставления команды животному, пользующемуся системой кормления, покинуть, по меньшей мере, один контейнер для корма, и стимулирующее устройство для подачи стимулирующего воздействия животному, расположенному около, по меньшей мере, одного контейнера для корма.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированную систему кормления животных, при этом, по меньшей мере, один контейнер для корма и составные элементы системы интегрированы в откормочной площадке.
В некоторых вариантах осуществления, изобретение заключает в себе систему идентификации животных, которая содержит уникальную маркировочную метку, носимую животным, и устройство для считывания маркировочной метки, которое обменивается данными с контроллером.
В некоторых вариантах осуществления, изобретение заключает в себе уникальную маркировочную метку, которая представляет собой микросхему радиочастотной идентификации, и устройство для считывания маркировочной метки, которое представляет собой устройство считывания с микросхемы.
В некоторых вариантах осуществления, параметр животного, по меньшей мере, в одном контейнере для корма относится к количеству корма, потребленного животным.
В некоторых вариантах осуществления, изобретение заключает в себе устройство для измерения параметра, который относится к количеству потребленного корма, и измеряет массу корма в, по меньшей мере, одном контейнере.
В некоторых вариантах осуществления, изобретение заключает в себе параметр, который относится к количеству корма, потребленного животным, и содержит калорийность потребленного корма.
В некоторых вариантах осуществления, изобретение заключает в себе контроллер, выполненный с возможностью вычисления калорийности потребленного корма.
В некоторых вариантах осуществления, изобретение заключает в себе ограждение, включающее в себя дверцу для доступа в, по меньшей мере, один контейнер для корма.
В некоторых вариантах осуществления, изобретение заключает в себе множество контейнеров для корма для предоставления различных кормов.
В некоторых вариантах осуществления, изобретение заключает в себе устройство подачи команды, которое издает слышимую команду.
В некоторых вариантах осуществления, изобретение заключает в себе блок обнаружения для обнаружения присутствия животного, включающий в себя оптический датчик.
В некоторых вариантах осуществления, изобретение заключает в себе стимулирующее устройство, содержащее генератор струи воздуха.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированную систему кормления животных, при этом контроллер содержит процессор, запрограммированный данными, относящимися к идентификатору животного, нормативу потребления корма, идентификатору корма, количеству корма, идентификатору контейнера для корма, собственной массе контейнера для корма, положению контейнера для корма, времени продолжительности кормления или их комбинациям.
В еще одном варианте осуществления, изобретение предоставляет автоматизированный способ кормления животных, причем способ содержит этапы, на которых:
(a) предоставляют, по меньшей мере, один контейнер для корма;
(b) предоставляют корм для животного в, по меньшей мере, одном контейнере для корма;
(c) предоставляют ограждение для предотвращения доступа животного к корму;
(d) обнаруживают, находится ли животное около, по меньшей мере, одного контейнера для корма;
если нет, (i) используют ограждение для предотвращения доступа к корму;
если да, (ii) направляют животное посредством подачи стимулирующего воздействия и повторяют этап (d) до тех пор, пока животное не окажется около, по меньшей мере, одного контейнера для корма; при этом этапом (d) управляют посредством контроллера. Изобретение может дополнительно содержать идентификацию животного, присутствующего в, по меньшей мере, одном контейнере для корма, измерение параметра животного в, по меньшей мере, одном контейнере, и предоставление животному команды покинуть, по меньшей мере, один контейнер для корма.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом, по меньшей мере, один контейнер для корма и составные элементы системы интегрированы в откормочной площадке.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом на этапах идентификации животного, присутствующего, по меньшей мере, в одном контейнере для корма, используется система идентификации животных, которая содержит уникальную маркировочную метку, носимую животным, и устройство для считывания маркировочной метки, которое обменивается данными с контроллером.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом уникальная маркировочная метка представляет собой микросхему радиочастотной идентификации, а устройство для считывания маркировочной метки представляет собой устройство считывания с микросхемы.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом параметр животного, по меньшей мере, в одном контейнере для корма относится к количеству корма, потребленного животным.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом количество потребленного корма измеряют посредством измерения массы корма, по меньшей мере, в одном контейнере.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом параметр, который относится к количеству корма, потребленного животным, содержит калорийность потребленного корма.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом контроллер выполнен с возможностью вычисления калорийности потребленного корма.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом ограждение содержит дверцу для доступа, по меньшей мере, в один контейнер для корма.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом, по меньшей мере, один контейнер для корма представляет собой множество контейнеров для корма для предоставления различных кормов.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом команда представляет собой слышимую команду.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом блок обнаружения для обнаружения присутствия животного содержит оптический датчик.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом стимулирующее воздействие представляет собой струю воздуха, обдувающую животное.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом контроллер содержит процессор, запрограммированный данными, относящимися к идентификатору животного, нормативу потребления корма, идентификатору корма, количеству корма, идентификатору контейнера для корма, собственной массе контейнера для корма, положению контейнера для корма, времени продолжительности кормления или их комбинациям.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, при этом животным является собака.
В некоторых вариантах осуществления, изобретение заключает в себе автоматизированное устройство кормления, включающее в себя контроллер, который запрограммирован задействовать автоматизированный способ кормления животных по любому из пунктов 21-40.
В еще одном варианте осуществления, изобретение заключает в себе систему кормления животных для оказания воздействия на трансформацию поведения нечеловекообразного животного, содержащую:
(a) систему идентификации животных для идентификации животного, которое пользуется системой кормления;
(b) ограждение для предотвращения доступа к, по меньшей мере, одному контейнеру для корма;
(d) устройство подачи команды для предоставления команды животному, пользующемуся системой кормления, с целью выполнения некоторого действия;
(e) блок обнаружения для обнаружения выполнило ли животное, пользующееся системой кормления, некоторое действие; и
(f) стимулирующее устройство для подачи стимулирующего воздействия животному, расположенному около, по меньшей мере, одного контейнера для корма;
при этом составными элементами системы управляют посредством контроллера. Изобретение может дополнительно содержать устройство для измерения параметра животного в, по меньшей мере, одном контейнере для корма.
В некоторых вариантах осуществления, изобретение заключает в себе устройство кормления животных, при этом, по меньшей мере, один контейнер для корма и составные элементы системы интегрированы в откормочной площадке.
В некоторых вариантах осуществления, изобретение заключает в себе устройство кормления животных, при этом система идентификации животных содержит уникальную маркировочную метку, носимую животным, и устройство для считывания маркировочной метки, которое обменивается данными с контроллером.
В некоторых вариантах осуществления, изобретение заключает в себе устройство кормления животных, при этом уникальная маркировочная метка представляет собой микросхему радиочастотной идентификации, а устройство для считывания маркировочной метки представляет собой устройство считывания с микросхемы.
В некоторых вариантах осуществления, изобретение заключает в себе устройство кормления животных, при этом параметр животного в, по меньшей мере, одном контейнере для корма относится к количеству корма, потребленного животным.
В некоторых вариантах осуществления, изобретение заключает в себе устройство кормления животных, при этом устройство для измерения параметра, который относится к количеству потребленного корма, измеряет массу корма в, по меньшей мере, одном контейнере.
В некоторых вариантах осуществления, изобретение заключает в себе устройство кормления животных, при этом параметр, который относится к количеству корма, потребленного животным, содержит калорийность потребленного корма.
В некоторых вариантах осуществления, изобретение заключает в себе устройство кормления животных, при этом контроллер выполнен с возможностью вычисления калорийности потребленного корма.
В некоторых вариантах осуществления, изобретение заключает в себе устройство кормления животных, при этом ограждение содержит дверцу для доступа в, по меньшей мере, один контейнер для корма.
В некоторых вариантах осуществления, изобретение заключает в себе устройство кормления животных, при этом, по меньшей мере, один контейнер для корма представляет собой множество контейнеров для корма для предоставления различных кормов.
В некоторых вариантах осуществления, изобретение заключает в себе устройство кормления животных, при этом устройство подачи команды издает слышимую команду.
В некоторых вариантах осуществления, изобретение заключает в себе устройство кормления животных, при этом блок обнаружения для обнаружения присутствия животного содержит оптический датчик.
В некоторых вариантах осуществления, изобретение заключает в себе устройство кормления животных, при этом стимулирующее устройство содержит генератор струи воздуха.
В некоторых вариантах осуществления, изобретение заключает в себе устройство кормления животных, при этом контроллер содержит процессор, запрограммированный данными, относящимися к идентификатору животного, нормативу потребления корма, идентификатору корма, количеству корма, идентификатору контейнера для корма, собственной массе контейнера для корма, положению контейнера для корма, времени продолжительности кормления или их комбинациям.
В еще одном варианте осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, содержащий:
(a) идентификацию подопытного животного для трансформации поведения с использованием системы идентификации животных, ассоциированной с контейнером для корма,
(b) предоставление команды животному, пользующемуся системой кормления, с целью выполнения некоторого действия; и
(c) обнаружение выполнило ли животное, пользующееся системой кормления, некоторое действие;
при этом составными элементами системы управляют посредством контроллера. Изобретение может дополнительно содержать измерение параметра животного в, по меньшей мере, одном контейнере для корма и подачу стимулирующего воздействия животному, расположенному около, по меньшей мере, одного контейнера для корма, (i) с целью заставить животное, пользующееся системой кормления, выполнить некоторое действие или (ii) как только выполнено некоторое действие.
В некоторых вариантах осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, при этом, по меньшей мере, один контейнер для корма и составные элементы системы интегрированы в откормочной площадке.
В некоторых вариантах осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, при этом система идентификации животных содержит уникальную маркировочную метку, носимую животным, и устройство для считывания маркировочной метки, которое обменивается данными с контроллером.
В некоторых вариантах осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, при этом уникальная маркировочная метка представляет собой микросхему радиочастотной идентификации, а устройство для считывания маркировочной метки представляет собой устройство считывания с микросхемы.
В некоторых вариантах осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, при этом параметр животного в, по меньшей мере, одном контейнере для корма относится к количеству корма, потребленного животным.
В некоторых вариантах осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, при этом устройство для измерения параметра, который относится к количеству потребленного корма, измеряет массу корма в, по меньшей мере, одном контейнере.
В некоторых вариантах осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, при этом параметр, который относится к количеству корма, потребленного животным, содержит калорийность потребленного корма.
В некоторых вариантах осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, при этом контроллер выполнен с возможностью вычисления калорийности потребленного корма.
В некоторых вариантах осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, при этом ограждение содержит дверцу для доступа в, по меньшей мере, один контейнер для корма.
В некоторых вариантах осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, при этом, по меньшей мере, один контейнер для корма представляет собой множество контейнеров для корма для предоставления различных кормов.
В некоторых вариантах осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, при этом устройство подачи команды издает слышимую команду.
В некоторых вариантах осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, при этом блок обнаружения для обнаружения присутствия животного содержит оптический датчик.
В некоторых вариантах осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, при этом стимулирующее устройство содержит генератор струи воздуха.
В некоторых вариантах осуществления, изобретение заключает в себе способ трансформации поведения нечеловекообразного животного, при этом контроллер содержит процессор, запрограммированный данными, относящимися к идентификатору животного, нормативу потребления корма, идентификатору корма, количеству корма, идентификатору контейнера для корма, собственной массе контейнера для корма, положению контейнера для корма, времени продолжительности кормления или их комбинациям.
Откормочная площадка изобретения
Изобретение заключает в себе автоматизированную систему кормления животных, которая содержит, по меньшей мере, один контейнер для корма и составные элементы системы, включающие в себя систему идентификации животных для идентификации животного, которое пользуется системой кормления; блок обнаружения для обнаружения присутствия животного, расположенного около, по меньшей мере, одного контейнера для корма; ограждение для предотвращения доступа к, по меньшей мере, одному контейнеру для корма; при этом составными элементами системы управляют посредством контроллера. Изобретение может дополнительно содержать устройство для измерения параметра животного в, по меньшей мере, одном контейнере для корма; устройство подачи команды для предоставления команды животному, пользующемуся системой кормления, покинуть, по меньшей мере, один контейнер для корма; и стимулирующее устройство для подачи стимулирующего воздействия животному, расположенному около, по меньшей мере, одного контейнера для корма.
В некоторых вариантах осуществления, автоматизированная система кормления согласно изобретению заключает в себе ограждение, которое используют вслед за командой, передаваемой животному, с целью предоставить возможность животному покинуть, по меньшей мере, один контейнер для корма в момент, определяемый параметром животного в контейнере для корма, таким как предварительно определенное количество потребленного корма или предварительно определенное время присутствия. В других вариантах осуществления, комбинация команды и, в случае необходимости, стимулирующего воздействия, гарантирует, что животное не поранится при использовании ограждения. Таким образом, обеспечивается безопасность и здоровье животного, с сохранением в то же время жесткого допуска по потреблению корма.
Автоматизированная система кормления животных изобретения разработана для сбора информации, обработки и предоставления обратной связи для каждого отдельного животного на основании заранее заданных команд для данной особи и в ответ на ее поведение. Система идентификации животных предоставлена для идентификации животного, для которого задействована система кормления. Система идентификации животных, как правило, включает в себя уникальную маркировочную метку, носимую животным, и устройство для считывания маркировочной метки, которое обменивается данными с контроллером. В некоторых вариантах осуществления, животное носит маркировочную метку в виде части своего оснащения, например на ошейнике. В качестве альтернативы, маркировочная метка может быть прикреплена непосредственно к телу животного или носиться внутри организма, например в виде подкожной вставки, что иногда используется для постоянной идентификации кошек и собак. В некоторых вариантах осуществления, маркировочная метка представляет собой микросхему радиочастотной идентификации (RFID), а устройство для считывания маркировочной метки представляет собой устройство считывания с микросхемы, хотя могут быть использованы другие маркировочные метки, включая любую RFID-метку, которая может быть прикреплена к животному. В некоторых вариантах осуществления, устройство для считывания маркировочной метки, как правило, расположено поблизости от, по меньшей мере, одного контейнера для корма, при этом, по меньшей мере, один контейнер для корма образует часть откормочной площадки. В некоторых вариантах осуществления, устройство для считывания маркировочной метки расположено в откормочной площадке в точке, где животное проходит для получения доступа к, по меньшей мере, одному контейнеру для корма. В некоторых вариантах осуществления, устройство для считывания маркировочной метки представляет собой портативное, управляемое вручную или неподвижное автоматическое устройство считывания, расположенное в месте, где животное получает доступ к корму. В некоторых вариантах осуществления, устройство для считывания маркировочной метки выполнено с возможностью обмениваться данными с контроллером. Подобный обмен данными может представлять собой проводной или беспроводной обмен данными общепризнанного типа.
Система кормления животных изобретения может включать в себя единственный контейнер для корма, который, как правило, бывает любого общепризнанного типа, как, например, стандартная кормушка. В некоторых вариантах осуществления, система кормления включает в себя множество контейнеров для корма. В некоторых вариантах осуществления, множество контейнеров для корма могут быть использованы для предоставления различных кормов животному с предоставлением выбора. В некоторых вариантах осуществления, доступ к множеству кормов предусматривает изучения вкуса и другие протоколы изучения корма. В некоторых вариантах осуществления, использование множества контейнеров для корма согласно настоящему изобретению предоставляет возможность получения точных данных потребления корма.
В других вариантах осуществления, изобретение заключает в себе устройство для измерения параметра животного из данного, по меньшей мере, одного контейнера для корма. Данный параметр, как правило, относится к количеству корма, потребленного животным, и может представлять собой массу потребленного корма и/или количество времени, которое животное затрачивает на нахождение в, по меньшей мере, одном контейнере для корма. Соответственно, устройство для измерения параметра может содержать весы и/или датчик времени. Имеется возможность использования весов для измерения массы животного перед кормлением и после него для вычисления массы потребленного корма. Взвешивание животного в месте нахождения может быть трудным и неточным. Вследствие этого, в некоторых вариантах осуществления, определяют массу, по меньшей мере, одного контейнера для корма для определения массы потребленного корма. В случае наличия множества контейнеров для корма, например, в протоколе исследования вкуса, измеряют массу каждого отдельного контейнера, потому что это предоставит информацию об индивидуальных кормовых предпочтениях животного. В других вариантах осуществления, измерение массы каждого контейнер для корма выполняют на постоянной основе.
В других вариантах осуществления, устройство для измерения параметра животного в, по меньшей мере, одном контейнере для корма выполнено с возможностью обмена данными с контроллером. В случае, когда контейнеры для корма взвешивают, например, на постоянной основе, обмен данными с контроллером предоставляет системе возможность вычисления калорийности потребленного корма из любого отдельного контейнера. В некоторых вариантах осуществления, система может проводить суммирующие расчеты в случае наличия множества контейнеров для корма с целью вычисления совокупной калорийности потребленного корма. В некоторых вариантах осуществления, данный параметр может сравниваться с предварительно заданным уровнем. Подобный предварительно заданный уровень может сохраняться в системе для ссылки относительно электронной идентификации животного, например сохраняться в памяти Программируемого Логического Контроллера (PLC).
В некоторых вариантах осуществления, контроллер может быть запрограммирован использовать ограждение для предотвращения доступа к, по меньшей мере, одному контейнеру для корма, как только достигнут предварительно заданный уровень, допуская промежуточные этапы предоставления команды и обеспечивая, что животное не окажется около, по меньшей мере, одного контейнера для корма, как описано в данной заявке. Ограждением предпочтительно является дверца для доступа, выполненная с возможностью предотвращения доступа в отдельный контейнер для корма или множество контейнеров для корма. В одном варианте осуществления, ограждение включает в себя множество дверей для доступа, причем каждая отдельная дверца предотвращает доступ в отдельный контейнер для корма или, в виде других компоновок, для более чем одного контейнера для корма. В некоторых вариантах осуществления, могут быть задействованы ограждения общепризнанного типа. В некоторых вариантах осуществления, каждая дверца для доступа к корму, как правило, может быть оборудована исполнительным механизмом с пневматическим цилиндром и быть выполнена с возможностью обмена данными с контроллером общепризнанным проводным или беспроводным способом. Как правило, когда достигается предварительно заданный уровень для калорийности потребленного корма, массы потребленного корма или другого параметра, контроллер обменивается данными с устройством подачи команд, блоком обнаружения и ограждением для предотвращения доступа в контейнеры для корма животного.
Перед использованием ограждения животному подается команда покинуть, по меньшей мере, один контейнер для корма. В некоторых вариантах осуществления, команда представляет собой слышимую команду, как, например, слышимая тональная или зуммерная команда. В других вариантах осуществления, она может быть подана с помощью тонального генератора, соединенного с громкоговорителем, расположенным поблизости, по меньшей мере, от одного контейнера для корма. В некоторых вариантах осуществления, команда может быть подана в других формах, при условии, что они также воздействуют на один или более из органов чувств животного. В некоторых вариантах осуществления, команда может представлять собой тактильную, зрительную, обонятельную или вкусовую команду, например струю воздуха, стробирующую световую команду, источник света, механическую руку, аромат или запах, выпускаемый около животного, а также слуховую команду.
Задача команды состоит в том, чтобы предоставить животному сигнал с задачей выполнения требуемого действия с оставлением, по меньшей мере, одного контейнера для корма, например, за счет простого отступления назад. Это шаблон поведения, который животному, вероятно, придется выучить за счет повторяющегося воздействия системы кормления. Согласно изобретению, предоставлен блок обнаружения для обнаружения присутствия животного около, по меньшей мере, одного контейнера для корма. В некоторых вариантах осуществления, блок обнаружения выполнен с возможностью находиться в состоянии обмена данными с контроллером. В некоторых вариантах осуществления, блок обнаружения может представлять собой любой общепризнанный блок обнаружения, способный воспринимать положение животного. В некоторых вариантах осуществления, блок обнаружения включает в себя оптический датчик. В некоторых вариантах осуществления, оптический датчик может представлять собой любой подходящий датчик, такой как комбинация источника излучения-принимающего устройства, в которой источник излучения испускает оптический луч, обнаруживаемый блоком обнаружения при условии, что прохождение луча не прерывается. В некоторых вариантах осуществления, когда животное находится в положении около, по меньшей мере, одного контейнера для корма, прохождение прерывается. Только когда животное уходит от, по меньшей мере, одного контейнера для корма, блок обнаружения лучей обнаруживает луч. В некоторых вариантах осуществления, оптический луч может иметь любую стандартную длину волны, включая видимые и невидимые световые длины волн.
В некоторых вариантах осуществления, стимулирующее устройство предоставлено для подачи стимулирующего воздействия животному в ситуации, когда животному была подана команда с задачей выполнения действия (например, покинуть откормочную площадку), но блок обнаружения все еще обнаруживает, что животное находится в контейнере для корма или около него. В некоторых вариантах осуществления, задача стимулирующего устройства состоит в том, чтобы оказать давление на животное с целью поощрить действие оставления, по меньшей мере, одного контейнера для корма. В одном варианте осуществления, стимулирующее воздействие включает в себя струю воздуха, которую дуют на животное. В данной конфигурации генератор струи воздуха располагается поблизости от, по меньшей мере, одного контейнера для корма и нацелен на морду животного или верхнюю часть головы животного. Стимулирующее устройство выполнено с возможностью обмениваться данными с контроллером и может осуществлять это общепризнанным проводным или беспроводным образом. Существует возможность выполнения системы таким образом, чтобы частота, продолжительность, интенсивность и тип стимулирующего воздействия могли изменяться или сочетаться для достижения требуемого ответа. Например, интенсивность струи воздуха может быть увеличена с целью поощрить животное отступить назад из контейнера для корма, если блок обнаружения продолжает обнаруживать там присутствие животного. Другие типы стимулирующего воздействия включают в себя, но без ограничения, например, интенсивность стробирующей световой команды, механическую дверцу, водную струю, громкие звуки или резкие запахи.
В одном иллюстративном варианте осуществления действия изобретения, как только потребление корма животным достигло предварительно заданного уровня, система узнает, через контроллер, что для предотвращения доступа к корму должно быть использовано ограждение. Для того чтобы осуществить это безопасно с целью избежать контакта между животным и движущимися деталями, который может привести к ранению, животному предоставляется команда, что оно должно отступить назад из, по меньшей мере, одного контейнера для корма. Система отслеживает, отреагировало ли животное на команду посредством блока обнаружения. Если блок обнаружения регистрирует, что животное вышло и, вследствие этого, не находится около контейнера для корма, используется ограждение. Однако, если блок обнаружения регистрирует, что животное все еще находится около, по меньшей мере, одного контейнера для корма, за счет чего имеется риск ранения, ограждение не должно быть использовано, при этом животному подается стимулирующее воздействие. Если животное теперь вышло из, по меньшей мере, одного контейнера для корма, блок обнаружения это обнаружит и ограждение может быть использовано. Если все еще не удается вывести животное из, по меньшей мере, одного контейнера для корма, стимулирующее воздействие может быть повторено, возможно, более интенсивно.
В иллюстративном варианте осуществления, если бы животное попробовало получить доступ к, по меньшей мере, одному контейнеру для корма в процессе использования ограждения, использование ограждения могло бы быть отменено с повторной активацией стимулирующего воздействия до тех пор, пока животное опять не покинет, по меньшей мере, один контейнер для корма.
В дополнение к непосредственным измерениям поглощения корма, система также может собирать информацию относительно отдельных животных, включая физиологические данные и поведение, например температуру тела, от коммерчески доступных RFID-чипов, а поведение: как быстро они едят, как много времени они приближаются к кормушке.
За счет правильного объединения команды и некоторых других видов обратной связи, например вознаграждения (т.е. корма) или давления, животное может автоматически обучаться с целью выполнения некоторого действия в ответ на специфичную команду. Например, отступление животного назад из кормушки подающего механизма является примером применения данного принципа. Еще одним примером должно быть использование различных слуховых команд с целью подачи сигналов собакам идти в помещение для кормления или выходить наружу в зависимости от требуемого действия.
Способы трансформации поведения нечеловекообразного животного
Изобретение также заключает в себе способ трансформации, регулирования или управления поведением животного. Способ применим к любому нечеловекообразному животному. В некоторых вариантах осуществления, способ применим к животным, которые способны к обучению с целью узнать значение команды. В некоторых вариантах осуществления, животным является собака.
Как использовано в данной заявке и до тех пор, пока не указано иное, "трансформация поведения" относится к изменению или видоизменению поведения животного, например кошки или собаки, через изменение отношения, восприятия, узнавания животным некоторого действия. Обучение (в виде обучения подчинению) учит специфическому поведенческому действию (как например, обучение сидеть). В контексте настоящего изобретения термин "трансформация поведения" относится к побуждению животного действовать некоторым образом, например сидеть, в результате некоторых стимулов, например кормления.
Соответственно, изобретение заключает в себе способ трансформации поведения животного. В некоторых вариантах осуществления, система кормления изобретения включает в себя применение следующих принципов для трансформации поведения: команда или сигнал с целью выполнения требуемого действие; поощрение с целью выполнения данного действия; возможность отслеживать предпринято ли правильное действие; быстрое устранение давления, когда осуществлено правильное действие; и повторное применение давления, если осуществлено неправильное действие.
В некоторых вариантах осуществления, система кормления изобретения представляет собой пример автоматизированного устройства трансформации поведения животного. Данная система предоставляет команду животному, например собаке или кошке, и может отслеживать предприняло ли животное правильное действие. Она также обладает возможностью "обучения" животного, чье действие должно быть осуществлено за счет направления его положения стимулирующим воздействием (напр., струей воздуха). За счет воздействия системы кормления большинство животных очень быстро учатся (например, в пределах 1 недели) реагировать исключительно на команду (т.е. для того, чтобы заставить животное выйти назад из кормушки, струя воздуха больше не нужна). В этот момент считается, что животное является обученным. Этот же самый принцип может быть применен также к другим ситуациям. Одним примером могло бы являться использование подобного устройства с целью заставить животных выйти из своего жилого загона в ответ на специфичный сигнал или зайти в него снаружи в ответ на другой специфичный сигнал.
Функционирование/Последовательность событий иллюстративного варианта осуществления
Установочные данные для сеанса кормление вводят в контроллер. Установочные данные для сеанса кормления вводят и сохраняют в базе данных. Когда сеанс кормления начинается, контроллер загружает данные для сеанса кормления для каждого животного, задействованного в сеансе. Загруженные данные сохраняются и используются в Программируемом Логическом Контроллере (PLC) во время сеанса кормления. После завершения сеанса кормления результирующие данные сеанса направляются в базу данных для долговременного хранения. Эти данные включают в себя идентификатор животного, норматив потребления корма, идентификатор корма, количество корма, идентификатор кормушки, собственную массу кормушки, положение кормушки и время продолжительности кормления.
В способе кормления оператор загружает собак на откормочную площадку, идентифицирует кабину для кормления и собак, идентифицирует и загружает кормушки, а затем начинает процесс кормления после проверки информации о кормлении (идентификатор животного, идентификатор корма, число предложений корма, количество (количества) корма, идентификатор (идентификаторы) кормушек и положение кормушек).
Выходная последовательность событий по завершении кормления состоит в следующем:
1) Запускается, по достижении норматива приема корма (величины потребления или времени).
2) Применяется сигнал выйти и отступить из кормушки (тоновый).
3) Применяется давление (струя воздуха), если животное не отвечает (обнаружено присутствие) на команду.
4) Ослабляется давление, когда обнаружен ответ животного (отсутствие ответа), и если обнаружено отсутствие ответа, то на время увеличивается уровень давления.
5) Закрывается дверца для доступа к корму, если животное не присутствует.
6) Если обнаружено присутствие животного в процессе закрытия дверцы, повторно открывается дверца и происходит возврат к событию 3.
Состав Системы
1) Приборы и средства для мониторинга (световая матрица, динамометрические датчики, RFID-устройство считывания).
2) Программируемый Логический Контроллер с интерфейсными модулями электронных сигналов (входных/выходных).
3) Интегрирующее программное обеспечение (Человеко-машинный интерфейс и Программируемое логическое управление).
4) Устройства/механизмы, которые взаимодействуют с животным - дверца для доступа к корму с исполнительным механизмом с пневматическим цилиндром, аудио тональный генератор и пневматическая система управления с форсунками для струй воздуха.
5) Аппаратное обеспечение IT (ПК, устройство считывания штриховых кодов, Коммутатор Ethernet Локальной вычислительной сети).
6) Огражденные места для аппаратного обеспечения, приборов и средств, кормушек и животного.
ПРИМЕРЫ
Система кормления
В иллюстративном варианте осуществления изобретения, описана система кормления собак со ссылкой на Фиг.1, которая показывает блок-схему системы управления. Компьютер обеспечивает интерфейс пользователя с автоматизированной системой кормления для установки и мониторинга сеанса кормления. Электронный ввод информации об идентифицирующих кодах собак и кормушек обеспечивается в компьютер посредством устройства считывания штрих кодов и RFID-устройства считывания. RFID-устройство считывания может быть связано с компьютером посредством связи Bluetooth. Компьютер связан с остальной системой кормления посредством коммутатора Ethernet и коммуникационного модуля ethernet. Программируемый Логический Контроллер соединен с коммуникационным модулем ethernet и отслеживает всю входную информацию, процессы или данные, и предоставляет всю соответствующую выходную информацию компонентам системы кормления. Программируемый Логический Контроллер связан с целью обмена данными с модулем датчика нагрузки, модулем ввода DC (постоянного тока) и модулем вывода DC.
Датчики нагрузок кормушек, изображенные как датчик нагрузки кормушки А и датчик нагрузки кормушки B, измеряют массу корма и изменяются по массе корма по мере того, как собака ест. Это предоставляет информацию о потреблении корма в режиме реального времени. Датчик положения ограждения обменивается данными с модулем ввода DC и предоставляет информацию системе о положении дверцы ограждения, которая может быть открыта или закрыта. Переключатель воздушного давления также обменивается данными с модулем ввода DC. Этот переключатель отслеживает давление воздуха, доступное системе, чтобы открыть или закрыть дверцу ограждения или чтобы предоставить стимулирующее воздействие струей воздуха собаке. Световая матрица обменивается данными с модулем ввода DC и регистрирует присутствие какого-либо объекта на пути дверцы ограждения. Таким образом, присутствие собаки может быть обнаружено. Предоставлен клапан управления сжатым воздухом, который осуществляет обмен информацией с модулем вывода DC. Этот клапан используется для активации пневматического цилиндра, чтобы открыть или закрыть дверцу ограждения. Другой клапан управления сжатым воздухом (не показан на схеме) используется для предоставления стимулирующего воздействия струей воздуха, чтобы заставить собаку отойти от кормушки с кормом, чтобы предоставить возможность безопасного закрытия дверцы ограждения. Аудио тональный сигнал осуществляет обмен информацией с модулем вывода DC. Аудио тональный сигнал предоставляет команду собаке, что ее прием пищи окончен и, что она должна отойти от кормушки. Сигнальная лампа также осуществляет обмен информацией с модулем вывода DC. Это предоставляет информацию оператору о состоянии каждой отдельной откормочной площадки.
Функционирование системы кормления
Далее описано функционирование и последовательность событий в системе кормления собак, описанной выше. Схема последовательности операций основных этапов показана на Фиг.2.
Настройка сеанса кормления:
Оператор вводит данные настройки сеанса кормления (идентификационные данные животных, идентификационные данные кормов, норматив потребления корма, предлагаемое количество кормов, идентификационные данные кормушек, положение кормушек и продолжительность приема корма).
Запуск сеанса кормления:
После загрузки каждой собаки в свою индивидуальную кабину для кормления электронные идентификационные данные для собаки и кабины для кормления считываются RFID-сканером и передаются в систему кормления. Затем система идентифицирует для оператора, какие кормушки следуют в каждом положении для каждого подающего устройства. Как только система проверила информацию о кормлении (идентификационные данные животных, идентификационные данные кормов, количества кормов, идентификационные данные кормушек и положение кормушек), сеанс кормления можно начинать.
Сеанс кормления:
Сеанс кормления начинается, когда система открывает дверцу ограждения корма и обеспечивает собаке возможность доступа к корму (кормам). Во время сеанса кормления система непрерывно отслеживает массу каждой кормушки и рассчитывает поглощение собаками каждого корма и общее количество потребленных кормов. Собаке обеспечивают возможность доступа ко всем кормушкам при условии, что суммарное потребление корма меньше, чем предварительно заданный для нее ежедневный норматив. Когда собака использовала свой ежедневный кормовой норматив или разрешенное время приема пищи, система запускает последовательность завершения сеанса кормления.
Последовательность завершения сеанса кормления:
Когда собака достигла норматива приема пищи (потребления или времени приема корма), система проверяет ее присутствие в кормушках, что отображается посредством световой матрицы. Если собака не присутствует на пути дверцы ограждения, система закрывает дверцу ограждения корма. Если собака присутствует, она получает от системы команду в виде аудио тонального сигнала с целью показать, что она должна отступить назад от кормушек. Если собака отступает от световой матрицы, система закрывает дверцу ограждения корма. Если собака остается на пути дверцы ограждения, она получает стимулирующее воздействие струей воздуха 1 уровня с целью поощрить ее отступить от кормушек. Если собака отступает от световой матрицы, система закрывает дверцу ограждения корма. Если нет, уровень интенсивности струи воздуха увеличивается (уровень 2 и уровень 3) до тех пор, пока собака не отступит с пути дверцы ограждения, и система не сможет безопасно заблокировать ей доступ к корму. Как только дверца ограждения корма оказывается в закрытом положении, система извещает оператора, что прием пищи собакой завершен и ее можно удалить из кабины для кормления.
Автоматизированная тренировка животных:
Поскольку эта система имеет возможность отслеживать присутствие собаки возле кормушки с кормом и предоставляет постоянную команду для того, чтобы она отодвинулась от кормушек с кормом, связанную с дифференцированным стимулирующим воздействием с целью поощрить такое передвижение, большинство собак очень быстро учатся выполнять желаемые действия в ответ только на команду.
Пример кормления собак
Прототип системы кормления был использован для кормления более чем 40 собак. Все собаки относительно быстро адаптировались к последовательности завершения приема корма в отсутствие проблем, связанных с безопасностью. Система также высоко эффективна для ограничения потребления корма. Таблица 1 показывает результаты кормления для каждой из 4 собак в течение 6 дней. Собакам была предоставлена возможность выбора между двумя различными кормами. Предлагаемое количество каждого корма было достаточно для поддержания массы тела каждой собаки, однако, в дни с 1 по 5 общее потребление корма каждой собакой ограничивалось системой до ее ежедневного норматива. На 6 день каждая собака не была ограничена с целью сравнения.
кационная информа
ция о собаке
Из данных, приведенных в Таблице 1, будет понятно, что использование системы кормления собак обеспечило возможность кормления собак регулируемым количеством корма, приблизительно соответствующем их кормовому нормативу. Там, где каждой собаке было дозволено неограниченное количество корма, данные показывают, что собаками была использована большая часть или весь предложенный корм, превышающий их ежедневный норматив.
Группа изобретений может быть использована в промышленном животноводстве для эффективного управления большими стадами коров, овец и тому подобное для обеспечения правильного кормления животных и отсутствия заболеваний. Автоматизированная система содержит, по меньшей мере, один контейнер для корма и составные элементы системы, содержащие: систему идентификации животных для идентификации животного, которое пользуется системой кормления; блок обнаружения для обнаружения присутствия животного около, по меньшей мере, одного контейнера для корма; и ограждение для управления доступом к, по меньшей мере, одному контейнеру для корма; устройство подачи команды для предоставления команды животному, пользующемуся системой кормления, покинуть, по меньшей мере, один контейнер для корма; стимулирующее устройство для передачи стимулирующего воздействия животному, расположенному около, по меньшей мере, одного контейнера для корма. Составными элементами системы управляют посредством контроллера. Устройство подачи команды, стимулирующее устройство и блок обнаружения взаимодействуют под управлением контроллера таким образом, что ограждение не используется, когда животное располагается около, по меньшей мере, одного контейнера. Изобретение обеспечивает автоматизированное средство взаимодействия с животными с целью кормления, сбора данных, трансформации поведения и обучения без вмешательства человека. 5 н. и 65 з.п. ф-лы, 2 ил.
1. Автоматизированная система кормления животных, которая содержит, по меньшей мере, один контейнер для корма и составные элементы системы, содержащие:
(a) систему идентификации животных для идентификации животного, которое пользуется системой кормления;
(b) блок обнаружения для обнаружения присутствия животного, расположенного около, по меньшей мере, одного контейнера для корма; и
(c) ограждение для управления доступом к, по меньшей мере, одному контейнеру для корма;
(d) устройство подачи команды для предоставления команды животному, пользующемуся системой кормления, покинуть, по меньшей мере, один контейнер для корма;
(e) стимулирующее устройство для передачи стимулирующего воздействия животному, расположенному около, по меньшей мере, одного контейнера для корма,
при этом составными элементами системы управляют посредством контроллера,
и при этом устройство подачи команды, стимулирующее устройство и блок обнаружения взаимодействуют под управлением контроллера таким образом, что ограждение не используется, когда животное располагается около, по меньшей мере, одного контейнера.
2. Автоматизированная система кормления животных по п.1, дополнительно содержащая устройство для измерения параметра животного в, по меньшей мере, одном контейнере для корма.
3. Автоматизированная система кормления животных по п.2, в которой устройство для измерения параметра животного в, по меньшей мере, одном контейнере для корма является аналогичным блоку обнаружения для обнаружения присутствия животного, расположенного около, по меньшей мере, одного контейнера для корма.
4. Автоматизированная система кормления животных по п.2 или 3, в которой устройство подачи команды активируется, когда достигается параметр животного в, по меньшей мере, одном контейнере для корма.
5. Автоматизированная система кормления животных по п.1, в которой, по меньшей мере, один контейнер для корма и составные элементы системы интегрированы в откормочной площадке.
6. Автоматизированная система кормления животных по п.1, в которой система идентификации животных содержит уникальную маркировочную метку, носимую животным, и устройство для считывания маркировочной метки, которое обменивается данными с контроллером.
7. Автоматизированная система кормления животных по п.6, в которой уникальная маркировочная метка представляет собой микросхему радиочастотной идентификации, а устройство для считывания маркировочной метки представляет собой устройство считывания с микросхемы.
8. Автоматизированная система кормления животных по п.2, в которой параметр животного в, по меньшей мере, одном контейнере для корма представляет собой идентификатор животного.
9. Автоматизированная система кормления животных по п.2, в которой параметр животного в, по меньшей мере, одном контейнере для корма относится к количеству корма, потребленного животным.
10. Автоматизированная система кормления животных по п.9, в которой устройство для измерения параметра, который относится к количеству потребленного корма, измеряет массу корма в, по меньшей мере, одном контейнере.
11. Автоматизированная система кормления животных по п.10, в которой параметр, который относится к количеству корма, потребленного животным, содержит калорийность потребленного корма.
12. Автоматизированная система кормления животных по п.11, в которой контроллер сконфигурирован для вычисления калорийности потребленного корма.
13. Автоматизированная система кормления животных по п.1, в которой ограждение содержит дверцу для доступа в, по меньшей мере, один контейнер для корма.
14. Автоматизированная система кормления животных по п.13, в которой, по меньшей мере, один контейнер для корма представляет собой множество контейнеров для корма для предоставления различных кормов.
15. Автоматизированная система кормления животных по п.4, в которой устройство подачи команды издает слышимую команду.
16. Автоматизированная система кормления животных по п.3, в которой блок обнаружения для обнаружения присутствия животного содержит оптический датчик.
17. Автоматизированная система кормления животных по п.1, в которой стимулирующее устройство содержит генератор струи воздуха.
18. Автоматизированная система кормления животных по п.12, в которой контроллер содержит процессор, запрограммированный данными, относящимися к идентификатору животного, нормативу потребления корма, идентификатору корма, количеству корма, идентификатору контейнера для корма, собственной массе контейнера для корма, положению контейнера для корма, времени продолжительности кормления или их комбинациям.
19. Автоматизированный способ кормления животных, причем способ содержит этапы, на которых:
(a) предоставляют, по меньшей мере, один контейнер для корма;
(b) предоставляют корм для животного в, по меньшей мере, одном контейнере для корма;
(c) предоставляют ограждение для предотвращения доступа животного к корму;
(d) обнаруживают, находится ли животное около, по меньшей мере, одного контейнера для корма;
если нет, (i) используют ограждение для предотвращения доступа к корму;
если да, (ii) направляют животное посредством подачи стимулирующего воздействия и повторение этапа (d) до тех пор, пока животное не окажется около, по меньшей мере, одного контейнера для корма; при этом этапом (d) управляют посредством контроллера.
20. Автоматизированный способ кормления животных по п.19, дополнительно содержащий этап, на котором измеряют параметр животного в, по меньшей мере, одном контейнере для корма.
21. Автоматизированный способ кормления животных по п.19 или 20, дополнительно содержащий этап, на котором предоставляют животному команду покинуть, по меньшей мере, один контейнер для корма.
22. Автоматизированный способ кормления животных по п.19, дополнительно содержащий этап, на котором идентифицируют животное, присутствующее в, по меньшей мере, одном контейнере для корма.
23. Автоматизированный способ кормления животных по п.19, в котором, по меньшей мере, один контейнер для корма и составные элементы системы интегрированы в откормочной площадке.
24. Автоматизированный способ кормления животных по п.22, в котором на этапах идентификации животного, присутствующего в, по меньшей мере, одном контейнере для корма, используется система идентификации животных, которая содержит уникальную маркировочную метку, носимую животным, и устройство для считывания маркировочной метки, которое обменивается данными с контроллером.
25. Автоматизированный способ кормления животных по п.24, в котором уникальная маркировочная метка представляет собой микросхему радиочастотной идентификации, а устройство для считывания маркировочной метки представляет собой устройство считывания с микросхемы.
26. Автоматизированный способ кормления животных по п.20, в котором параметр животного в, по меньшей мере, одном контейнере для корма представляет собой идентификатор животного.
27. Автоматизированный способ кормления животных по п.20, в котором параметр животного в, по меньшей мере, одном контейнере для корма относится к количеству корма, потребленного животным.
28. Автоматизированный способ кормления животных по п.27, в котором количество потребленного корма измеряют посредством измерения массы корма, по меньшей мере, в одном контейнере.
29. Автоматизированный способ кормления животных по п.28, в котором параметр, который относится к количеству корма, потребленного животным, содержит калорийность потребленного корма.
30. Автоматизированный способ кормления животных по п.28, в котором контроллер сконфигурирован для вычисления калорийности потребленного корма.
31. Автоматизированный способ кормления животных по п.19, в котором ограждение содержит дверцу для доступа в, по меньшей мере, один контейнер для корма.
32. Автоматизированный способ кормления животных по п.31, в котором, по меньшей мере, один контейнер для корма представляет собой множество контейнеров для корма для предоставления различных кормов.
33. Автоматизированный способ кормления животных по п.21, в котором команда представляет собой слышимую команду.
34. Автоматизированный способ кормления животных по п.19, в котором обнаружение присутствия животного содержит использование оптического датчика.
35. Автоматизированный способ кормления животных по п.19, в котором стимулирующее воздействие представляет собой струю воздуха, обдувающую животное.
36. Автоматизированный способ кормления животных по п.30, в котором контроллер содержит процессор, запрограммированный данными, относящимися к идентификатору животного, нормативу потребления корма, идентификатору корма, количеству корма, идентификатору контейнера для корма, собственной массе контейнера для корма, положению контейнера для корма, времени продолжительности кормления или их комбинациям.
37. Автоматизированный способ кормления животных по п.19, в котором животным является собака.
38. Контроллер для автоматизированной системы кормления животных по любому из пп.1-18, который запрограммирован задействовать автоматизированный способ кормления животных по любому из пп.19-37.
39. Система кормления животных для оказания воздействия на трансформацию поведения нечеловекообразного животного, содержащая:
(a) систему идентификации животных для идентификации животного, которое пользуется системой кормления;
(b) ограждение для предотвращения доступа к, по меньшей мере, одному контейнеру для корма;
(c) устройство подачи команды для предоставления команды животному, пользующемуся системой кормления, с целью выполнения некоторого действия;
(d) блок обнаружения для обнаружения, выполнило ли животное, пользующееся системой кормления, некоторое действие; и
(е) стимулирующее устройство для подачи стимулирующего воздействия животному, расположенному около, по меньшей мере, одного контейнера для корма;
при этом составными элементами системы управляют посредством контроллера,
и при этом устройство подачи команды, стимулирующее устройство и блок обнаружения взаимодействуют под управлением контроллера таким образом, что ограждение не используется, когда животное располагается около, по меньшей мере, одного контейнера.
40. Система кормления животных по п.39, дополнительно содержащая устройство для измерения параметра животного в, по меньшей мере, одном контейнере для корма.
41. Система кормления животных по п.40, в которой устройство для измерения параметра животного в, по меньшей мере, одном контейнере для корма является аналогичным блоку обнаружения для обнаружения присутствия животного, расположенного около, по меньшей мере, одного контейнера для корма.
42. Система кормления животных по п.40 или 41, в которой, по меньшей мере, один контейнер для корма и составные элементы системы интегрированы в откормочной площадке.
43. Система кормления животных по п.39, в которой система идентификации животных содержит уникальную маркировочную метку, носимую животным, и устройство для считывания маркировочной метки, которое обменивается данными с контроллером.
44. Система кормления животных по п.43, в которой уникальная маркировочная метка представляет собой микросхему радиочастотной идентификации, а устройство для считывания маркировочной метки представляет собой устройство считывания с микросхемы.
45. Система кормления животных по п.41, в которой параметр животного в, по меньшей мере, одном контейнере для корма представляет собой идентификатор животного.
46. Система кормления животных по п.41, в которой параметр животного в, по меньшей мере, одном контейнере для корма относится к количеству корма, потребленного животным.
47. Система кормления животных по п.46, в которой устройство для измерения параметра, который относится к количеству потребленного корма, измеряет массу корма в, по меньшей мере, одном контейнере.
48. Система кормления животных по п.47, в которой параметр, который относится к количеству корма, потребленного животным, содержит калорийность потребленного корма.
49. Система кормления животных по п.48, в которой контроллер сконфигурирован для вычисления калорийности потребленного корма.
50. Система кормления животных по п.39, в которой ограждение содержит дверцу для доступа в, по меньшей мере, один контейнер для корма.
51. Система кормления животных по п.47, в которой, по меньшей мере, один контейнер для корма представляет собой множество контейнеров для корма для предоставления различных кормов.
52. Система кормления животных по п.39, в которой устройство подачи команды издает слышимую команду.
53. Система кормления животных по п.41, в которой блок обнаружения для обнаружения присутствия животного содержит оптический датчик.
54. Система кормления животных по п.39, в которой стимулирующее устройство содержит генератор струи воздуха.
55. Система кормления животных по п.49, в которой контроллер содержит процессор, запрограммированный данными, относящимися к идентификатору животного, нормативу потребления корма, идентификатору корма, количеству корма, идентификатору контейнера для корма, собственной массе контейнера для корма, положению контейнера для корма, времени продолжительности кормления или их комбинациям.
56. Способ трансформации поведения нечеловекообразного животного, содержащий этапы, на которых:
(a) идентифицируют подопытное животное для трансформации поведения с использованием системы идентификации животных, ассоциированной с, по меньшей мере, одним контейнером для корма,
(b) предоставляют ограждение для предотвращения доступа животного к корму;
(c) предоставляют команду животному, пользующемуся системой кормления, с целью выполнения некоторого действия;
(d) обнаруживают, выполнило ли животное, пользующееся системой кормления, некоторое действие;
(e) обнаруживают, находится ли животное около, по меньшей мере, одного контейнера для корма;
если нет, (i) используют ограждения для предотвращения доступа к корму;
если да, (ii) направляют животное посредством подачи стимулирующего воздействия и повторение этапа (е) до тех пор, пока животное не окажется около, по меньшей мере, одного контейнера для корма;
при этом этапом (е) управляют посредством контроллера.
57. Способ по п.56, дополнительно содержащий этап, на котором измеряют параметр животного в, по меньшей мере, одном контейнере для корма.
58. Способ по любому из пп.56-57, в котором, по меньшей мере, один контейнер для корма и составные элементы системы интегрированы в откормочной площадке.
59. Способ по п.56, в котором система идентификации животных содержит уникальную маркировочную метку, носимую животным, и устройство для считывания маркировочной метки, которое обменивается данными с контроллером.
60. Способ по п.59, в котором уникальная маркировочная метка представляет собой микросхему радиочастотной идентификации, а устройство для считывания маркировочной метки представляет собой устройство считывания с микросхемы.
61. Способ по п.57, в котором параметр животного в, по меньшей мере, одном контейнере для корма относится к количеству корма, потребленного животным.
62. Способ по п.61, в котором количество потребленного корма измеряют посредством измерения массы корма в, по меньшей мере, одном контейнере.
63. Способ по п.62, в котором параметр животного в, по меньшей мере, одном контейнере для корма, который относится к количеству корма, потребленного животным, содержит калорийность потребленного корма.
64. Способ по п.63, в котором контроллер сконфигурирован для вычисления калорийности потребленного корма.
65. Способ по п.56, в котором ограждение содержит в себе дверцу для доступа в, по меньшей мере, один контейнер для корма.
66. Способ по п.65, в котором, по меньшей мере, один контейнер для корма представляет собой множество контейнеров для корма для предоставления различных кормов.
67. Способ по п.56, в котором команда представляет собой слышимую команду.
68. Способ по п.56, в котором этап, на котором обнаруживают присутствие животного, содержит использование оптического датчика.
69. Способ по п.56, в котором стимулирующее воздействие представляет собой струю воздуха, обдувающую животное.
70. Способ по п.64, в котором контроллер содержит процессор, запрограммированный данными, относящимися к идентификатору животного, нормативу потребления корма, идентификатору корма, количеству корма, идентификатору контейнера для корма, собственной массе контейнера для корма, положению контейнера для корма, времени продолжительности кормления или их комбинациям.
| DE 3623816 A1, 22.01.1987 | |||
| Устройство для кормления животных | 1981 |
|
SU971180A1 |
| EP 1886555 A1, 13.02.2008 | |||
| US 20050224003 A1, 13.10.2005 | |||
| EP 1145628 A2, 17.10.2001 | |||
| US 20070125306 A1, 07.06.2007. | |||

