Перекрестная ссылка на родственные заявки
Данная заявка относится к заявке на получение патента Китая № 201910142215.X, поданной 26 февраля 2019 года, которая полностью включена в данный документ посредством ссылки.
Область техники, к которой относится настоящее изобретение
Настоящее раскрытие в общем относится к управлению объектами, такими как домашний скот, а более конкретно к способам, устройству и системам для выращивания и сортировки объектов.
Предшествующий уровень техники настоящего изобретения
Качество домашнего скота может влиять на рыночную цену домашнего скота. Для того, чтобы уменьшить затраты и увеличить доходы, хозяйствам нужно производить домашний скот высокого качества, такой как домашний скот с умеренным весом и низким жиром. Одно решение состоит в кормлении домашнего скота в отдельных группах. С таким решением хозяйства могут отбирать домашний скот, удовлетворяющий конкретным рыночным требованиям, например, отбирать домашний скот в пределах конкретного диапазона масс или требований к кормлению, например, к кормлению домашнего скота по фазам условий выращивания домашнего скота. Однако может быть трудно и дорого вручную определять базу, такую как пороговая масса домашнего скота, для сортировки домашнего скота, удовлетворяющей конкретным рыночным требованиям или требованиям кормления. Кроме того, из-за отсутствия данных, относящихся к домашнему скоту из других хозяйств и внешним факторам, таким как рыночная цена или рыночные требования, может быть трудно всесторонне рассматривать различные факторы для определения базы. Кроме того, может быть трудно эффективно сортировать домашний скот в отдельных группах или собирать точные данные, относящиеся к домашнему скоту, без повторной подготовки домашнего скота.
Таким образом, было бы желательно разработать устройство, системы и способы, которые учитывают по меньшей мере некоторые из обсуждавшихся выше проблем, а также другие возможные проблемы.
Краткое раскрытие настоящего изобретения
Иллюстративные варианты исполнения настоящего раскрытия направлены на управление объектами, такими как домашний скот. В иллюстративных вариантах исполнения используют систему, такую как система выращивания и рыночной сортировки, содержащая множество устройств для сбора данных, относящихся к объектам, посредством датчиков и сортировки объектов по разным зонам в хозяйстве. В иллюстративных вариантах исполнения можно получать посредством сервера параметры, относящиеся к объектам, например, данные со стороны. В иллюстративных вариантах исполнения можно регулировать базу для сортировки домашнего скота в отдельных группах на основании параметров, полученных от сервера, и/или данных, собранных посредством датчиков. В иллюстративных вариантах исполнения можно загружать отрегулированную базу и данные, собранные посредством датчиков, на сервер из множества устройств. В некоторых вариантах осуществления иллюстративные варианты исполнения можно реализовать в распределенной системе, такой как система распределенного хранения.
Иллюстративные варианты исполнения могут обеспечить множество преимуществ по сравнению с существующими решениями. Например, за счет получения посредством сервера параметров, относящихся к объектам, таких как данные со стороны, и/или сбора посредством датчиков данных, относящихся к объектам, множество устройств могут всесторонне рассматривать различные факторы, включая рыночные факторы для определения базы для сортировки домашнего скота в отдельных группах и могут отбирать объекты с более высоким качеством для увеличения доходов хозяйства. Также, развернутая в хозяйстве система может собирать точные данные, относящиеся к объектам, посредством датчиков без повторной подготовки объектов, облегчать сортировку объектов, таких как домашний скот, на отдельные группы, и прогнозировать сроки продажи объектов на рынке. Таким образом, можно сократить трудозатраты хозяйства. Кроме того, за счет регулировки базы множество устройств могут отбирать конкретные диапазоны объектов для конкретных рыночных требований или требований кормления, таких как кормление домашнего скота по фазам условий выращивания домашнего скота. Кроме того, за счет загрузки на сервер отрегулированной базы и данных, собранных посредством датчиков, система может делиться отрегулированной базой и собранными данными с другими, например, другими хозяйствами, мясокомбинатами или их клиентами.
Таким образом, настоящее раскрытие включает в себя, без ограничения, следующие иллюстративные варианты исполнения.
В некоторых иллюстративных вариантах исполнения представлена система для хозяйства, содержащая: шлюз сбора данных; и множество устройств, каждое из которых выполнено с возможностью: получения параметров, относящихся к объектам в хозяйстве, от сервера через шлюз сбора данных, причем параметры включают в себя эталонную пороговую массу объектов; сбора масс объектов посредством датчиков; регулировки эталонной пороговой массы на основании полученных параметров для создания отрегулированной пороговой массы; и сортировки объектов по разным зонам в хозяйстве на основании отрегулированной пороговой массы и собранных масс.
В некоторых иллюстративных вариантах исполнения или любой комбинации предыдущих иллюстративных вариантов исполнения системы эталонная пороговая масса имеет разные значения по меньшей мере для некоторых из множества устройств, и отрегулированная пороговая масса имеет разные значения по меньшей мере для некоторых из множества устройств.
В некоторых иллюстративных вариантах исполнения или любой комбинации предыдущих иллюстративных вариантов исполнения системы одно или более из множества устройств, кроме того, выполнены с возможностью загрузки отрегулированных пороговых масс одного или более из множества устройств на сервер через шлюз сбора данных для сохранения отрегулированных пороговых масс в базе данных.
В некоторых иллюстративных вариантах исполнения или любой комбинации предыдущих иллюстративных вариантов исполнения системы по меньшей мере одно из множества устройств выполнено с возможностью регулировки эталонной пороговой массы на основании отрегулированной пороговой массы по меньшей мере еще одного устройства из множества устройств.
В некоторых иллюстративных вариантах исполнения или любой комбинации предыдущих иллюстративных вариантов исполнения системы каждое из множества устройств соединено со шлюзом сбора данных посредством шины данных.
В некоторых иллюстративных вариантах исполнения или любой комбинации предыдущих иллюстративных вариантов исполнения системы параметры, относящиеся к объектам, включают в себя по меньшей мере: количество объектов; диапазон рыночных масс; рыночную цену объектов; и массы других объектов по меньшей мере из еще одного хозяйства.
В некоторых иллюстративных вариантах исполнения или любой комбинации предыдущих иллюстративных вариантов исполнения системы объекты включают в себя домашний скот.
В некоторых иллюстративных вариантах исполнения представлено устройство, содержащее: входные ворота; сортировочное весовое оборудование, соединенное с входными воротами; выходные ворота, соединенные с сортировочным весовым оборудованием; сортировочные ворота; множество ворот, соединенных с сортировочными воротами; и процессор и память с сохраненными выполняемыми командами, которые в ответ на выполнение процессором вызывают выполнение устройством следующего: открывания входных ворот, чтобы позволить объекту зайти на сортировочное весовое оборудование через входные ворота; получения массы объекта с использованием сортировочного весового оборудования; перемещения сортировочных ворот на основании массы объекта с образованием прохода между выходными воротами и одними из множества ворот; а после этого открывания выходных ворот, чтобы позволить объекту пройти через проход и добраться до одних из множества ворот.
В некоторых иллюстративных вариантах исполнения или любой комбинации предыдущих иллюстративных вариантов исполнения устройства, причем устройство, обеспечивающее перемещение сортировочных ворот на основании массы объекта, предусматривает обеспечение: определения пороговой массы на основании параметров, относящихся к множеству объектов, полученных от сервера; проведения сравнения между массой объекта и пороговой массой; и перемещения сортировочных ворот на основании сравнения с образованием прохода.
В некоторых иллюстративных вариантах исполнения или любой комбинации предыдущих иллюстративных вариантов исполнения устройства в памяти хранятся дополнительные выполняемые команды, которые в ответ на выполнение процессором дополнительно вызывают выполнение устройством следующего: получения масс множества объектов с использованием сортировочного весового оборудования; и загрузки масс на сервер для сохранения масс в базе данных.
В некоторых иллюстративных вариантах исполнения или любой комбинации предыдущих иллюстративных вариантов исполнения устройства в памяти хранятся дополнительные выполняемые команды, которые в ответ на выполнение процессором дополнительно вызывают выполнение устройством следующего: закрывания входных ворот некоторое число раз; а при определении, что число раз имеет пороговое значение, создания предупреждающего сигнала, указывающего, что входные ворота не закрыты.
В некоторых иллюстративных вариантах исполнения или любой комбинации предыдущих иллюстративных вариантов исполнения устройства в памяти хранятся дополнительные выполняемые команды, которые в ответ на выполнение процессором дополнительно вызывают выполнение устройством следующего: определения, что объект находится внутри сортировочного весового оборудования в течение заданного периода времени; и в ответ использования механизма или создания сигнала, стимулирующего прохождение объекта через выходные ворота.
В некоторых иллюстративных вариантах исполнения или любой комбинации предыдущих иллюстративных вариантов исполнения устройства в памяти хранятся дополнительные выполняемые команды, которые в ответ на выполнение процессором дополнительно вызывают выполнение устройством следующего: определения, что объект находится внутри сортировочного весового оборудования в течение заданного периода времени; и в ответ открывания входных ворот, в то время как выходные ворота открыты, для облегчения прохождения объекта через выходные ворота, позволяя другому объекту зайти на сортировочное весовое оборудование через входные ворота.
В некоторых иллюстративных вариантах исполнения или любой комбинации предыдущих иллюстративных вариантов исполнения устройства в памяти хранятся дополнительные выполняемые команды, которые в ответ на выполнение процессором дополнительно вызывают выполнение устройством следующего: поворота сортировочных ворот для облегчения прохождения объекта через проход и достижения одних из множества ворот.
В некоторых иллюстративных вариантах исполнения представлен способ, исполняемый устройством. Устройство содержит входные ворота, сортировочное весовое оборудование, выходные ворота, сортировочные ворота и множество ворот, а способ предусматривает: открывание входных ворот, чтобы позволить объекту зайти на сортировочное весовое оборудование через входные ворота; получение массы объекта с использованием сортировочного весового оборудования; перемещение сортировочных ворот на основании массы объекта с образованием прохода между выходными воротами и одними из множества ворот; а после этого открывание выходных ворот, чтобы позволить объекту пройти через проход и добраться до одних из множества ворот.
Эти и другие признаки, аспекты и преимущества настоящего раскрытия будут понятны при чтении следующего подробного описания вместе с сопровождающими фигурами, которые кратко описаны ниже. Настоящее раскрытие включает в себя любую комбинацию двух или более признаков или элементов, изложенных в этом раскрытии, независимо от того, были ли такие признаки или элементы явно объединены или иным образом изложены в конкретном иллюстративном варианте исполнения, описанном в настоящем документе. Это раскрытие предназначено для целостного прочтения, так что любые отделимые признаки или элементы согласно раскрытию в любых их аспектах и иллюстративных вариантах исполнения следует рассматривать как комбинируемые, если в контексте раскрытия явно не изложено иное.
Таким образом, должно быть понятно, что такое Краткое Раскрытие представлено всего лишь с целью краткого изложения некоторых иллюстративных вариантов исполнения для того, чтобы обеспечить базовое понимание некоторых аспектов раскрытия. Соответственно, должно быть понятно, что вышеописанные иллюстративные варианты исполнения - всего лишь примеры, и их никоим образом не следует истолковывать, как сужение объема и сути раскрытия. Другие иллюстративные варианты исполнения, аспекты и преимущества станут понятны из следующего подробного описания, сделанного в сочетании с сопровождающими фигурами, которые иллюстрируют в качестве примера принципы некоторых описанных иллюстративных вариантов исполнения.
Краткое описание фигур
После описания таким образом в общих терминах иллюстративных вариантов исполнения раскрытия далее будет сделана ссылка на сопровождающие фигуры, которые необязательно нарисованы в масштабе, и на которых:
На фиг. 1 представлена инфраструктура для управления объектами согласно иллюстративным вариантам исполнения настоящего раскрытия;
На фиг. 2 представлена блок-схема иллюстративных модулей для управления объектами согласно иллюстративным вариантам исполнения настоящего раскрытия;
На фиг. 3 представлена блок-схема иллюстративного шлюза сбора данных согласно иллюстративным вариантам исполнения настоящего раскрытия;
На каждой из фиг. 4A-4B представлена блок-схема иллюстративного хозяйства согласно иллюстративным вариантам исполнения настоящего раскрытия;
На каждой из фиг. 5A-5B представлено иллюстративное устройство и/или его компоненты согласно иллюстративным вариантам исполнения настоящего раскрытия;
На каждой из фиг. 5C, 5D, 5E и 5F представлено иллюстративное устройство и/или его компоненты согласно другим иллюстративным вариантам исполнения настоящего раскрытия;
На фиг. 6 представлена технологическая схема, иллюстрирующая различные операции в иллюстративном способе сортировки объектов согласно иллюстративным вариантам исполнения настоящего раскрытия;
На фиг. 7 представлена технологическая схема, иллюстрирующая различные операции в иллюстративном способе сортировки объектов согласно другим иллюстративным вариантам исполнения настоящего раскрытия;
На фиг. 8 представлена технологическая схема, иллюстрирующая различные операции в иллюстративном способе управления домашним скотом согласно иллюстративным вариантам исполнения настоящего раскрытия; и
На фиг. 9 представлены аппаратные компоненты иллюстративного контроллера согласно иллюстративным вариантам исполнения настоящего раскрытия.
Подробное раскрытие настоящего изобретения
Некоторые варианты исполнения настоящего раскрытия далее будут описаны более полно со ссылкой на сопровождающие фигуры, на которых показаны некоторые, но не все варианты исполнения раскрытия. На самом деле, различные варианты исполнения раскрытия можно реализовать в виде множества разных форм, и их не следует истолковывать как ограничение вариантами исполнения, изложенными в настоящем документе; вместо этого, эти иллюстративные варианты исполнения представлены таким образом, чтобы это раскрытие было тщательным и полным и полностью передавало специалистам в данной области объем раскрытия. Например, если не указано иное, ссылку на что-либо как первое, второе и тому подобное не следует истолковывать как подразумевающую конкретный порядок. Также что-то, возможно описанное как находящееся выше чего-то еще (если не указано иное), вместо этого может быть ниже, и наоборот; и аналогично, что-либо, описанное как находящееся слева от чего-то еще, вместо этого может быть справа, и наоборот. Одинаковые ссылочные номера везде относятся к одинаковым элементам.
Иллюстративные варианты исполнения настоящего раскрытия в общем направлены на управление объектами, такими как домашний скот, а конкретно, на способы, устройство и системы для управления объектами, например, кормления или сортировки объектов. Необходимо понимать, что способы, устройство и системы применимы к любому количеству объектов, таких как свиньи, крупный рогатый скот, овцы, козы, лошади, мулы, ослы, буйволы и верблюды и тому подобное.
На фиг. 1 представлена иллюстративная инфраструктура 100 для управления объектами согласно иллюстративным вариантам исполнения настоящего раскрытия. Как показано, в некоторых вариантах осуществления инфраструктура 100 может включать в себя сервер 102, соединенный с базой 104 данных. Сервер 102 может хранить или извлекать информацию из базы 104 данных. В одном варианте осуществления сервер 102 и/или база 104 данных может быть в облаке. Инфраструктура 100 также может включать в себя пользовательский интерфейс 106, такой как браузер или приложение («App»), чтобы обеспечить пользователю возможность предоставления на сервер 102 входных данных, таких как параметры, относящиеся к объектам. Инфраструктура 100 может дополнительно включать в себя одну или более систем 112, например, систем 112a и 112b. Системы 112 можно соединить с сервером 102 по сети 108 передачи данных. Каждую систему 112 можно развернуть для соответствующего хозяйства 110 для облегчения сортировки объектов, таких как домашний скот в хозяйстве 110. Например, систему 112a можно развернуть для хозяйства 110a для облегчения сортировки домашнего скота в хозяйстве 110a, а систему 112b можно развернуть для хозяйства 110b для облегчения сортировки домашнего скота в хозяйстве 110b. Также следует понять, что инфраструктура 100 может включать в себя одну или более дополнительных или альтернативных подсистем, чем те, что показаны на фиг. 1.
Как показано на фиг. 1, в некоторых вариантах осуществления каждая система 112 (например, система 112a) включает в себя множество устройств 116 (например, устройства 116a, 116b и 116c) и шлюз 114 сбора данных. В этих примерах каждое из множества устройств 116 соединено со шлюзом 114 сбора данных посредством шины 118 данных. Шиной 118 данных может быть шина данных локальной сети контроллеров (CAN) или шина данных RS485. В других вариантах осуществления система 112 может включать в себя только одно устройство 116, соединенное со шлюзом 114 сбора данных посредством шины 118 данных.
В некоторых вариантах осуществления для системы 112 (например, для системы 112a) каждое из множества устройств 116 (например, устройство 116a, 116b и 116c) выполнено с возможностью получения параметров, относящихся к объектам в хозяйстве, (например, в хозяйстве 110a) от сервера 102 через шлюз 114 сбора данных. В этих примерах параметры включают в себя эталонную пороговую массу объектов. Эталонную пороговую массу можно использовать для облегчения сортировки объектов в хозяйстве, как описано более подробно ниже.
В некоторых вариантах осуществления эталонная пороговая масса может иметь одинаковое значение для множества устройств 116 в хозяйстве 110. В других вариантах осуществления некоторым из устройств 116 в хозяйстве 110 могут понадобиться разные значения эталонной пороговой массы для сортировки объектов, удовлетворяющих разным рыночным требованиям (например, отбор конкретного диапазона рыночных масс) или требованиям кормления (например, кормления объектов в группе согласно разным фазам роста объектов). В этих примерах эталонная пороговая масса может иметь разные значения по меньшей мере для некоторых из множества устройств 116 в хозяйстве 110. Например, эталонная пороговая масса для устройства 116a может отличаться от эталонной пороговой массы для устройства 116b в хозяйстве 110a.
В некоторых вариантах осуществления для системы (например, для системы 112a) параметры, относящиеся к объектам, могут включать в себя по меньшей мере количество объектов (например, количество объектов может быть 500), диапазон рыночных масс, рыночную цену объектов и массы других объектов по меньшей мере из еще одного хозяйства. Параметры также могут включать в себя другую информацию, как описано более подробно ниже.
Система 112 может собирать данные, относящиеся к объектам, посредством датчиков и загружать собранные данные на сервер 102. Датчики можно устанавливать или прикреплять к устройству 116. Данные, собранные устройством 116, можно загружать на сервер 102 через шлюз 114 сбора данных посредством шины 118 данных. Для обеспечения точности собранных данных между шлюзом 114 сбора данных и устройством 116 или между некоторыми из устройств 116 можно образовать Интернет вещей (IoT) на основе шины 118 данных, такой как CAN-шина данных или шина данных RS485. Сервер 102 может сохранять собранные данные в базе 104 данных. В некоторых вариантах осуществления устройство 116 также может сохранять собранные данные. В некоторых вариантах осуществления для системы (например, для системы 112a) каждое из множества устройств 116 выполнено с возможностью сбора масс объектов посредством датчиков. Каждое из множества устройств 116 может загружать собранные массы на сервер 102 для сохранения собранных масс в базе 104 данных.
Как описано выше, сервер 102 может предоставлять параметры, относящиеся к объектам, включая эталонную пороговую массу, каждому из устройств 116 системы 112 в хозяйстве 110. В этих примерах для системы (например, для системы 112a), каждое из устройств 116 выполнено с возможностью регулировки эталонной пороговой массы на основании полученных параметров для создания отрегулированной пороговой массы. Например, каждое из устройств 116 может регулировать эталонную пороговую массу на основании полученной медианной массы или средней массы объектов в тот же самый день для создания отрегулированной пороговой массы. Необходимо понимать, что разные отрегулированные пороговые массы можно использовать для сортировки объектов разного качества. Когда конкретное устройство может сортировать объекты более высокого качества, чем другое устройство, на основании отрегулированной пороговой массы конкретного устройства, другое устройство в хозяйстве или устройство в другом хозяйстве может дополнительно регулировать их эталонные пороговые массы на основании отрегулированной пороговой массы конкретного устройства.
В некоторых вариантах осуществления для системы (например, для системы 112a) по меньшей мере одно из множества устройств 116 выполнено с возможностью регулировки эталонной пороговой массы на основании отрегулированной пороговой массы по меньшей мере еще одного устройства из множества устройств 116 в одном и том же хозяйстве (например, в хозяйстве 110a). Например, устройство 116a и устройство 116b могут регулировать эталонную пороговую массу на основании отрегулированной пороговой массы устройства 116c в одном и том же хозяйстве 110a. В других вариантах осуществления по меньшей мере одно из множества устройств 116 в хозяйстве (например, в хозяйстве 110a) может регулировать эталонную пороговую массу на основании отрегулированной пороговой массы устройства в другом хозяйстве (например, в хозяйстве 110b). Например, устройство 116a и устройство 116b в хозяйстве 110a могут регулировать эталонную пороговую массу на основании отрегулированной пороговой массы устройства в хозяйстве 110b. В некоторых вариантах осуществления одно или более из множества устройств 116 кроме того выполнены с возможностью загрузки отрегулированных пороговых масс на сервер 102 через шлюз 114 сбора данных. В этих примерах отрегулированные пороговые массы можно сохранять в базе 104 данных.
В некоторых вариантах осуществления сервер 102 может получать из базы 104 данных параметры, относящиеся к объектам. Параметры, относящиеся к объектам, могут включать в себя эталонную пороговую массу. В других вариантах осуществления параметры, относящиеся к объектам, могут не включать в себя эталонную пороговую массу, сервер 102 может создавать эталонную пороговую массу на основании информации, извлеченной из базы 104 данных. В некоторых вариантах осуществления сервер 102 может динамически обновлять эталонную пороговую массу. В некоторых вариантах осуществления сервер 102 может динамически предоставлять обновленную эталонную пороговую массу в базу 104 данных, устройство 116 и/или пользователям, соответственно. В некоторых вариантах осуществления сервер 102 можно соединить с одним или более шлюзами 114 сбора данных. Эталонную пороговую массу и обновленную эталонную пороговую массу можно передавать в устройство 116 через один или более шлюзов 114 сбора данных.
Система 112 может сортировать объекты по разным зонам в хозяйстве 110 на основании отрегулированной пороговой массы и/или относящихся к объектам данных, собранных посредством датчиков в хозяйстве 110. В некоторых вариантах осуществления для системы (например, для системы 112a) каждое из устройств 116 выполнено с возможностью сортировки объектов по разным зонам в хозяйстве 110a на основании отрегулированной пороговой массы и собранных масс. Отрегулированная пороговая масса может иметь одинаковое значение для множества устройств 116 в хозяйстве 110. В других вариантах осуществления какому-то устройству в хозяйстве нужны разные значения отрегулированной эталонной пороговой массы для сортировки объектов, удовлетворяющих разным рыночным требованиям или требованиям кормления. В этих примерах отрегулированная пороговая масса может иметь разные значения по меньшей мере для некоторых из множества устройств 116. Кроме того, следует заметить, что отрегулированная пороговая масса в разных хозяйствах 110 может иметь одно и то же или иное значение (значения) для устройства 116.
Как описано выше, в некоторых вариантах осуществления объекты включают в себя домашний скот. Например, домашним скотом могут быть свиньи, крупный рогатый скот, овцы, козы, лошади, мулы, ослы, буйволы и верблюды и тому подобное.
Система 112 может включать в себя любое количество разных подсистем (каждая отдельная система) для выполнения одной или более функций или операций. Подсистемы можно совместить или прямо соединить друг с другом, или в некоторых вариантах осуществления различные подсистемы могут взаимодействовать друг с другом с помощью одной или более компьютерных сетей. Кроме того, хотя показано в виде части системы 112, необходимо понимать, что любое одно или более устройств 116 и шлюз 114 сбора данных могут функционировать или работать как отдельная система вне зависимости от любых других подсистем. Также следует понять, что система 112 может включать в себя одну или более дополнительных или альтернативных подсистем, чем те, что показаны на фиг. 1.
Хотя описание выше преимущественно относится к системе 112a, аналогичные функции и процессы можно применять к другим системам, таким как система 112b в инфраструктуре 100.
В некоторых вариантах осуществления в инфраструктуре 100 база 104 данных может представлять собой распределенную базу данных. Используя технологию распределенных реестров, множество хозяйств могут иметь доступ к одним и тем же данным, таким как данные, сохраненные в распределенной базе данных. Из-за природы технологии распределенных реестров данные в распределенном реестре почти невозможно забыть и/или фальсифицировать, что может повысить целостность и безопасность данных. Данные, сохраненные в распределенной базе данных, могут включать в себя параметры, относящиеся к объектам, такие как эталонная пороговая масса объектов, отрегулированная эталонная пороговая масса объектов, и данные, собранные от датчиков и тому подобное.
В некоторых вариантах осуществления устройство 116 может образовать распределенный реестр для распределения информации, такой как параметры, друг в друге. В этих вариантах осуществления устройству 116 может быть не нужно извлекать параметры, сохраненные в базе 104 данных, посредством сервера 102. Вместо этого одно устройство 116 может получать параметры из другого устройства 116 с используемой технологией распределенного реестра. Например, одно устройство 116 (например, устройство 116a) может запрашивать параметры («токен»), такие как эталонная пороговая масса, из другого устройства 116 для регулировки своей собственной пороговой массы. В таком примере запрашивающее устройство 116 может создать уникальный адрес с использованием закрытого и открытого ключей и транслировать уникальный адрес другому устройству 116. После получения уникального адреса устройства 116a другое устройство 116 (например, устройство 116b) может отправить запрашиваемые параметры по уникальному адресу таким образом, чтобы запрашивающее устройство 116a могло получить запрашиваемые параметры.
В некоторых вариантах осуществления WiFi или сотовые сети (например, 2G, 3G, 4G, 5G и тому подобное) могут быть недоступны для взаимодействия устройств 116 друг с другом с целью обмена информацией. В этих вариантах осуществления устройства 116 могут взаимодействовать друг с другом по спутниковой связи. Альтернативно, устройства 116 могут образовать локальную IoT сеть для взаимодействия друг с другом без доступа к внешней сети, такой как Интернет.
На ФИГ. 2 представлена блок-схема иллюстративных модулей для управления объектами согласно иллюстративным вариантам исполнения настоящего раскрытия. Как показано, в некоторых вариантах осуществления инфраструктура 100 может обеспечить для пользователей облачный сервис 200, включая сервис 202 управления пользователями, сервис 204 конфигурации параметров, сервис 206 отображения и анализа данных и сервис 208 технического обслуживания системы.
Сервис 202 управления пользователями может включать в себя один или более модулей для управления информацией, относящейся к пользователям облачного сервиса 200. Как показано на фиг. 2, в некоторых вариантах осуществления сервис 202 управления пользователями может включать в себя модуль 210 создания пользователя, модуль 212 удаления пользователя, модуль 214 изменения пользователя, модуль 216 изменения пароля и модуль 218 регистрации пользователя.
В модуле 210 создания пользователя можно создавать аккаунты разных групп пользователей для доступа к облачному сервису 200. В некоторых вариантах осуществления группы пользователей могут включать в себя группу суперадминистраторов, группу администраторов и группу операторов. Пользователи в группе суперадминистраторов могут иметь доступ, изменять и/или удалять всю информацию (например, информацию, относящуюся к группам пользователей), сохраненную в базе 104 данных. Пользователи в группе администраторов могут иметь доступ, изменять и/или удалять ограниченную информацию (например, информацию, относящуюся к группе операторов), сохраненную в базе 104 данных. У пользователей в группе операторов может отсутствовать разрешение для доступа к изменению и/или удалению информации, относящейся к группе суперадминистраторов и группе администраторов, сохраненных в базе 104 данных.
В модуле 212 удаления пользователя можно удалять информацию, относящуюся к аккаунтам, такую как имя пользователя. В модуле 214 изменения пользователя можно изменять информацию, относящуюся к аккаунтам, такую как имя пользователя. В некоторых вариантах осуществления пользователи в группе суперадминистраторов могут иметь доступ, изменять и/или удалять аккаунты группы администраторов и аккаунты группы операторов. В других вариантах осуществления пользователи в группе администраторов могут иметь доступ, изменять и/или удалять аккаунты группы операторов. В дополнительных примерах пользователи в группе операторов могут изменять свою собственную пользовательскую информацию. В модуле 216 изменения пароля можно изменять пароли аккаунтов. В модуле 218 регистрации пользователя можно управлять регистрацией пользователей. В некоторых вариантах осуществления в модуле 218 регистрации пользователя можно создавать регистрационный код. Регистрационный код может представлять собой уникальный код, действующий в течение заданного периода времени.
Сервис 204 конфигурации параметров может включать в себя один или более модулей для конфигурирования параметров. Как показано на фиг. 2, в некоторых вариантах осуществления сервис 204 конфигурации параметров может включать в себя модуль 220 управления устройствами, модуль 222 конфигурации сообщений, модуль 224 конфигурации предупреждений и модуль 226 конфигурации синхронизации.
В модуле 220 управления устройствами можно устанавливать параметры, относящиеся к объектам для устройства 116. В некоторых вариантах осуществления параметры, относящиеся к объектам, могут включать в себя рабочие параметры, такие как заданная масса, заданный период времени, значение, используемое для калибровки сортировочного весового оборудования, временной интервал для повторного открывания входных ворот и продолжительность открывания сортировочных ворот и тому подобное. Например, заданная масса может быть показателем, что объект входит в сортировочные ворота или покидает их. Заданный период времени может быть показателем продолжительности времени, когда объект стоит в сортировочных воротах.
В некоторых вариантах осуществления параметры, относящиеся к объектам, могут включать в себя эталонный параметр, такой как эталонная пороговая масса, диапазон рыночных масс, количество рыночных объектов и рыночную цену объектов, диапазон масс объектов, объекты для сортировки и тому подобное. Например, эталонную пороговую массу можно использовать в качестве базы для сортировки объектов на основании масс объектов.
В некоторых вариантах осуществления параметры, относящиеся к объектам, могут включать в себя статистический параметр, такой как статистический процент объектов, количество объектов в хозяйстве, количество других объектов по меньшей мере из еще одного хозяйства, массы объектов в хозяйстве, массы других объектов по меньшей мере из еще одного хозяйства, процентиль масс объектов в хозяйстве и процентиль масс других объектов по меньшей мере из еще одного хозяйства и тому подобное. В некоторых вариантах осуществления параметры, относящиеся к объектам, могут включать в себя комбинацию рабочего параметра, эталонного параметра и/или статистического параметра.
В модуле 222 конфигурации сообщений можно устанавливать контактную информацию пользователей, такую как телефонный номер пользователей. В модуле 224 конфигурации предупреждений можно устанавливать формы (например, текстовое сообщение или диалоговое окно) или содержимое предупреждающего сигнала. В модуле 226 конфигурации синхронизации можно устанавливать синхронизацию инфраструктуры 100. Например, синхронизацией может быть период времени для автоматического сохранения данных, сохраненных в инфраструктуре 100. В другом примере синхронизацией может быть период времени для калибровки устройства 116, шлюза 114 сбора данных и/или сервера 102.
Сервис 206 отображения и анализа данных может включать в себя один или более модулей для отображения и анализа данных, относящихся к объектам. Как показано на фиг. 2, в некоторых вариантах осуществления сервис 206 отображения и анализа данных может включать в себя модуль 228 отдельных объектов, модуль 230 групповых объектов и модуль 232 анализа больших данных. Как показано, в некоторых вариантах осуществления модуль 228 отдельных объектов может включать в себя данные сортировки отдельных объектов 242, собранные данные отдельных объектов 244, отчет о росте отдельных объектов 246 и частоту сортировки отдельных объектов 248. Например, данные сортировки отдельных объектов 242 могут включать в себя разные зоны, куда можно сортировать отдельные объекты. Собранные данные отдельных объектов 244 могут включать в себя такие данные, как массы отдельных объектов, собранные устройством 116. Отчет о росте отдельных объектов 246 может включать в себя отчет о росте масс отдельных объектов. Частота сортировки отдельных объектов 248 может включать в себя частоту сортировки отдельных объектов в течение некоторого периода времени.
Как показано на фиг. 2, в некоторых вариантах осуществления модуль 230 групповых объектов может включать в себя обзор групповых объектов 250, данные сортировки групповых объектов 252, собранные данные групповых объектов 254, отчет о росте групповых объектов 256, ежедневный отчет о групповых объектах 258 и рыночный прогноз групповых объектов 260. Например, обзор групповых объектов 250 может включать в себя данные сортировки, собранные данные, отчет о росте или ежедневный отчет об объектах для устройства (например, для устройства 116) в хозяйстве (например, в хозяйстве 110a). Данные сортировки групповых объектов 252 могут включать в себя данные сортировки объектов для устройства, такие как средняя масса, частота сортировки или оставшееся количество объектов для устройства. Собранные данные групповых объектов 254 могут включать в себя такие данные, как массы объектов, собранные устройством. Отчет о росте групповых объектов 256 может включать в себя отчет о росте масс объектов для устройства. Ежедневный отчет о групповых объектах 258 может включать в себя ежедневный отчет о данных сортировки и собранных данных объектов для устройства.
Рыночный прогноз групповых объектов 260 может включать в себя прогноз продажи на рынке объектов, например, диапазон масс для продажи на рынке, рыночную цену объектов для продажи на рынке или временной интервал сортировки объектов для продажи на рынке.
Как показано на фиг. 2, в некоторых вариантах осуществления модуль 232 анализа больших данных может включать в себя анализ пород 262, анализ кормов 264, анализ окружения 266 и анализ регионов 268. В этих примерах модуль 232 анализа больших данных может проводить анализ больших данных для расчета базы для управления объектами с использованием анализа пород 262, анализа кормов 264, анализа окружения 266 и/или анализа регионов 268. В одном примере оптимальной базой может быть заданное количество кормов для кормления объектов. Например, анализ пород 262 может включать в себя анализ количества объектов, относящихся к разным породам. Анализ кормов 264 может включать в себя анализ количества объектов, которых кормят разными кормами. Анализ окружения 266 может включать в себя анализ количества объектов, которых кормят в разных условиях. Анализ регионов 268 может включать в себя анализ количества объектов, которых кормят в разных регионах.
Сервис 208 технического обслуживания системы может включать в себя один или более модулей для проведения технического обслуживания системы 112 (например, системы 112a и системы 112b). Как показано на фиг. 2, в некоторых вариантах осуществления сервис 208 технического обслуживания системы может включать в себя модуль 234 резервного копирования данных, модуль 236 восстановления данных, модуль 238 системных записей и модуль 240 записи сообщений. Модуль 234 резервного копирования данных может проводить резервное копирование данных, относящихся к объектам. Модуль 236 восстановления данных может восстанавливать данные, относящиеся к объектам. Модуль 238 системных записей может записывать данные, связанные с использованием систем 112. Модуль 240 записи сообщений может записывать сообщения, посылаемые системами 112 пользователям.
В некоторых вариантах осуществления информацию (например, параметры и данные), которая описана выше со ссылкой на ФИГ. 2, можно сохранять в базе 104 данных.
На ФИГ. 3 представлена блок-схема иллюстративного шлюза сбора данных согласно иллюстративным вариантам исполнения настоящего раскрытия. Как показано, в некоторых вариантах осуществления шлюз 114 сбора данных может включать в себя основной поток 300. Основной поток 300 может создавать дочерние потоки, такие как обрабатывающий поток 302, поток 304 передачи данных в реальном времени, поток 306 передачи исторических данных и поток 308 обеспечения.
Как показано на фиг. 3, в некоторых вариантах осуществления обрабатывающий поток 302 может получать параметры, относящиеся к объектам, и/или команды от сервера 102 и передавать полученные параметры и/или команды в устройство 116. В некоторых вариантах осуществления обрабатывающий поток 302 может хранить полученные параметры в конфигурационном файле 310. Поток 304 передачи данных в реальном времени может получать данные, собранные устройством 116, и передавать полученные данные на сервер 102.
В некоторых вариантах осуществления соединение между устройством 116 и сервером 102 можно прерывать. В этих примерах поток 304 передачи данных в реальном времени может хранить полученные данные во временном файле 312 данных. Также поток 306 передачи исторических данных может динамически отслеживать соединение и может передавать данные, сохраненные во временном файле 312 данных на сервер 102 после восстановления соединения. В некоторых вариантах осуществления поток 308 обеспечения может отслеживать работу шлюза 114 сбора данных. Например, поток 308 обеспечения может перезапускать шлюз 114 сбора данных при отсутствии передачи параметров, команд и/или данных в течение заданного периода времени. В некоторых вариантах осуществления пользователи инфраструктуры 100 могут устанавливать заданный период времени или указанный временной интервал для перезапуска шлюза 114 сбора данных.
На каждой из Фиг. 4A и 4B представлена блок-схема иллюстративного хозяйства согласно иллюстративным вариантам исполнения настоящего раскрытия. Как показано на фиг. 4A, в некоторых вариантах осуществления хозяйство 110 может включать в себя зону 402 кормления и зону 404 отдыха. Зона 402 кормления может включать в себя зону 406 низкой массы, зону 408 средней массы и зону 410 высокой массы. Зона 406 низкой массы, зона 408 средней массы и зона 410 высокой массы соединены с устройством 116, соответственно. В этих примерах устройство 116 может сортировать объекты в зону 406 низкой массы, зону 408 средней массы или зону 410 высокой массы на основании отрегулированной пороговой массы и собранных масс, которые описаны выше. В некоторых вариантах осуществления зона 402 кормления может включать в себя карантинную зону 412. В карантинной зоне 412 можно кормить слабые или больные объекты. В некоторых вариантах осуществления карантинную зону 412 можно соединить прямо с устройством 116. Устройство 116 может сортировать слабые или больные объекты в карантинную зону 412. В некоторых вариантах осуществления хозяйство 110 может включать в себя односторонние ворота 418. Объекты в зоне 402 кормления могут проходить через односторонние ворота 418 в зону 404 отдыха.
В некоторых вариантах осуществления, как показано на фиг. 4A, в зоне 402 кормления может содержаться один или более сухих кормов 414. В зоне 404 отдыха может содержаться один или более смачивающих резервуаров 416. В этих примерах объекты могут поедать сухих корма в зоне 402 кормления и пить воду в зоне 404 отдыха. Хозяйство, которое показано на фиг. 4B, аналогично хозяйству, которое показано на фиг. 4A. Одно отличие состоит в том, что на фиг. 4B в зоне 402 кормления может содержаться один или более сухих-влажных кормов 420. В этих примерах объекты имеют сухие корма вместе с водой.
На каждой из Фиг. 5A и 5B представлено иллюстративное устройство и/или его компоненты согласно иллюстративным вариантам исполнения настоящего раскрытия. Как показано на фиг. 5A, в некоторых вариантах осуществления устройство 116 содержит входные ворота 502, сортировочное весовое оборудование 504, соединенное с входными воротами 502, и выходные ворота 506, соединенные с сортировочным весовым оборудованием 504. Устройство 116 также содержит сортировочные ворота 508 и множество ворот 510 (например, ворота 510a, 510b и 510c), соединенных с сортировочными воротами 508. Объекты можно сортировать в три разные зоны через трое ворот 510a, 510b и 510c. Устройство дополнительные содержит контроллер 512 для управления работой устройства 116.
На ФИГ. 5B представлен контроллер 512 согласно иллюстративным вариантам исполнения настоящего раскрытия. Как показано на фиг. 5B, в некоторых вариантах осуществления контроллер 512 может содержать один или более модулей, таких как модуль 522 управления входными воротами, модуль 524 сбора данных, модуль 526 управления сортировочными воротами и модуль 528 управления выходными воротами. Контроллер 512 также может содержать другие модули, не показанные на фиг. 5B. Функции модулей может выполнять процессор, такой как Центральный вычислительный блок (CPU), как описано со ссылкой на ФИГ. 9 ниже.
Модуль 522 управления входными воротами может управлять состоянием входных ворот 502. В некоторых вариантах осуществления модуль 522 управления входными воротами выполнен с возможностью открывания входных ворот 502, чтобы позволить объекту, такому как домашний скот, зайти на сортировочное весовое оборудование 504 через входные ворота 502. Для того, чтобы собирать посредством датчиков точные данные, относящиеся к объекту, необходимо, чтобы устройство 116 обеспечивало правильную работу входных ворот 502. Например, модуль 522 управления входными воротами может обнаружить состояние входных ворот 502 для определения, закрыты ли входные ворота 502. После входа объекта на сортировочное весовое оборудование 504 через входные ворота 502 входные ворота 502 нужно правильно закрыть. Таким образом, другой объект не может зайти на сортировочное весовое оборудование 504 через входные ворота 502 и помешать сбору данных объекта на сортировочном весовом оборудовании 504. В некоторых вариантах осуществления модуль 522 управления входными воротами выполнен с возможностью закрывания входных ворот 502 некоторое число раз. При определении, что число раз имеет пороговое значение (например, 5 раз), модуль 522 управления входными воротами выполнен с возможностью создания предупреждающего сигнала, указывающего, что входные ворота 502 не закрыты. Предупреждающий сигнал может уведомлять пользователя устройства 116, что входные ворота 502 могут работать неправильно, например, из-за неисправности входных ворот 502.
Модуль 524 сбора данных может собирать данные, относящиеся к объекту, после того, как объект входит на сортировочное весовое оборудование 504 через входные ворота 502. В некоторых вариантах осуществления модуль 524 сбора данных выполнен с возможностью получения массы объекта с использованием сортировочного весового оборудования 504. Сортировочное весовое оборудование 504 может включать в себя один или более датчиков измерения масс объектов. В некоторых вариантах осуществления модуль 524 сбора данных выполнен с возможностью получения масс множества объектов с использованием сортировочного весового оборудования 504 и загрузки масс на сервер (например, сервер 102) для сохранения масс в базе данных (например, в базе 104 данных). Как описано выше, за счет загрузки на сервер данных, собранных посредством датчиков, система в хозяйстве может делиться своими собранными данными через сервер с другими, например, с другими хозяйствами, мясокомбинатами или их клиентами.
Модуль 526 управления сортировочными воротами может управлять состоянием сортировочных ворот 508, используя данные, собранные модулем 524 сбора данных. В некоторых вариантах осуществления модуль 526 управления сортировочными воротами выполнен с возможностью перемещения сортировочных ворот 508 на основании массы объекта с образованием прохода между выходными воротами 506 и одними из множества ворот 510 (например, ворот 510a). Объект может идти через проход в разные предназначенные для него зоны (например, в зону 406 низкой массы, в зону 408 средней массы, в зону 410 высокой массы или карантинную зону 412).
Для образования прохода в некоторых вариантах осуществления модуль 526 управления сортировочными воротами выполнен с возможностью определения пороговой массы на основании параметров, относящихся к множеству объектов, полученных от сервера 102, и проведения сравнения между массой объекта и пороговой массой. Параметры могут включать в себя эталонную пороговую массу, как описано выше. В некоторых вариантах осуществления модуль 526 управления сортировочными воротами выполнен с возможностью перемещения сортировочных ворот 508 на основании сравнения с образованием прохода. Например, если масса объекта (например, 105 килограмм) больше, чем пороговая масса (например, 100 килограмм), это может указывать, что объект соответствует конкретному рыночному требованию или требованию кормления, и его можно продать на рынке. Модуль 526 управления сортировочными воротами может перемещать сортировочные ворота 508 с образованием прохода между выходными воротами 506 и воротами 510a. Таким образом, объект может идти в назначенную ему зону (например, зону 410 высокой массы) через проход между выходными воротами 506 и воротами 510a.
В некоторых вариантах осуществления устройство 116 может содержать загон 514, как показано на фиг. 5A. Загон 514 можно соединить между выходными воротами 506 и множеством ворот 510. В этих примерах проход можно образовать внутри загона 514.
Модуль 528 управления выходными воротами может управлять состоянием выходных ворот, позволяющим объекту идти в разные предназначенные для него зоны (например, в зону 410 высокой массы). В некоторых вариантах осуществления после перемещения сортировочных ворот 508 модуль 528 управления выходными воротами выполнен с возможностью открытия выходных ворот 506, чтобы позволить объекту пройти через проход и добраться до одних из множества ворот 510. В обычных решениях выходные ворота 506 можно открывать перед перемещением сортировочных ворот 508. Однако в этих обычных решениях объект может проходить через выходные ворота 506 перед образованием прохода между выходными воротами 506 и одними из множества ворот 510. В такой ситуации, когда сортировочные ворота 508 перемещаются с образованием прохода, перемещение сортировочных ворот 508 может ударить объект и может ранить объект. Открывание выходных ворот 506 после перемещения сортировочных ворот 508 как описано в настоящем раскрытии, может предотвратить случайное ранение объекта. Вот почему, когда объект проходит через выходные ворота 506, сортировочные ворота 508 перемещены с образованием прохода. Таким образом, объект может просто проходить через уже образованный проход, и сортировочные ворота 508 не могут его ударить.
Контроллер 512 также может управлять работой устройства 116, помогая объекту идти в разные предназначенные для него зоны (например, в зону 410 высокой массы). В некоторых вариантах осуществления модуль 526 управления сортировочными воротами выполнен с возможностью определения, что объект находится внутри сортировочного весового оборудования 504 в течение заданного периода времени. Модуль 526 управления сортировочными воротами может уведомлять модуль 528 управления выходными воротами. В ответ модуль 528 управления выходными воротами выполнен с возможностью использования механизма или создания сигнала, стимулирующего объект проходить через выходные ворота 506. Например, модуль 528 управления выходными воротами может создавать вибрацию выходных ворот 506 или создавать едкий запах, стимулирующий объект проходить через выходные ворота 506.
В других вариантах осуществления модуль 526 управления сортировочными воротами выполнен с возможностью определения, что объект находится внутри сортировочного весового оборудования 504 в течение заданного периода времени. Модуль 526 управления сортировочными воротами может уведомлять модуль 522 управления входными воротами. В ответ модуль 522 управления входными воротами выполнен с возможностью открывания входных ворот 502, пока открыты выходные ворота 506, для облегчения прохождения объекта через выходные ворота 506, позволяя другому объекту зайти на сортировочное весовое оборудование через входные ворота 502. Например, объектом может быть первая свинья внутри сортировочного весового оборудования 504 в течение заданного периода времени, например, 5 минут. Модуль 522 управления входными воротами может открывать входные ворота 502 таким образом, чтобы вторая свинья могла зайти на сортировочное весовое оборудование 504 через открытые входные ворота 502. Из-за ограниченного пространства сортировочного весового оборудования 504 вторая свинья может толкнуть или лягнуть первую свинью, заставляя первую свинью пройти через открытые выходные ворота 506 в разные назначенные для нее зоны (например, в зону 410 высокой массы).
При прохождении через проход объект может остановиться в проходе, что может значительно повлиять на эффективность сортировки объектов в назначенные зоны. В некоторых вариантах осуществления модуль 526 управления сортировочными воротами выполнен с возможностью поворота сортировочных ворот 508 для облегчения прохождения объекта через проход и достижения одних из множества ворот 510.
В некоторых вариантах осуществления ворота 510 представляют собой односторонние ворота. Объект может проходить из прохода через одни из односторонних ворот (например, ворота 510a). За счет использования односторонних ворот, после прохождения объекта через односторонние ворота (например, ворота 510a) можно предотвратить возврат объекта назад в проход. В других вариантах осуществления ворота 510 могут представлять собой двусторонние ворота.
В некоторых вариантах осуществления объект может иметь уникальный идентификатор, такой как прикрепленная к объекту Радиочастотная Идентификационная (RFID) карта. Устройство 116 может содержать приемник 516 сигнала, как показано на фиг. 5A, для извлечения информации, сохраненной в уникальном идентификаторе. Приемник 516 сигнала может передавать извлеченную информацию в память контроллера 512 или устройство 116 для сохранения.
В некоторых вариантах осуществления устройство 116 может содержать цилиндр 518, соединенный с сортировочными воротами 508, как показано на фиг. 5A. Модуль 526 управления сортировочными воротами может поворачивать сортировочные ворота 508 посредством цилиндра 518.
В некоторых вариантах осуществления устройство 116 может содержать электромагнитный клапан 520 цилиндра, как показано на фиг. 5A. Модуль 526 управления сортировочными воротами может управлять состоянием сортировочных ворот 508 через электромагнитный клапан 520 цилиндра. Конкретно, электромагнитный клапан 520 цилиндра может управлять цилиндром 518, соединенным с сортировочными воротами 508, что может вызывать поворот сортировочных ворот 508. Аналогично, модуль 522 управления входными воротами и модуль 528 управления выходными воротами могут управлять состоянием входных ворот 502 и выходных ворот 506 через электромагнитный клапан 520 цилиндра, соответственно.
На ФИГ. 5C представлено другое иллюстративное устройство 116 согласно иллюстративным вариантам исполнения настоящего раскрытия. По сравнению с устройством 116, показанным на фиг. 5A, устройство 116, показанное на фиг. 5C, содержит вместо трех двое односторонних ворот (т.е. ворота 510d и 510e). Таким образом, объекты можно сортировать в две разные зоны через двое ворота 510d и 510e. Устройство 116, показанное на фиг. 5C, также содержит ось 530, соединенную с сортировочными воротами 508 и воротами 510. Устройство 116 может поворачивать сортировочные ворота 508 посредством оси 530.
На ФИГ. 5D представлена трехмерная конструкция устройства 116 согласно иллюстративным вариантам исполнения настоящего раскрытия. Как показано, в некоторых вариантах осуществления устройство 116 может содержать корпус 532, соединенный с верхней частью сортировочных ворот 508. Корпус 532 может защищать сортировочные ворота 508. Например, корпус 532 может предотвращать сортировочные ворота 508 от появления ржавчины.
На ФИГ. 5E представлена конструкция внешней рамы сортировочного весового оборудования 504 согласно иллюстративным вариантам исполнения настоящего раскрытия. Как показано, в некоторых вариантах осуществления сортировочное весовое оборудование 504 может включать в себя главную раму 534 и множество панелей 536. В некоторых вариантах осуществления сортировочные ворота 508 могут содержать поддерживающий датчик компонент 538, соединенный с контроллером 512. Поддерживающий датчик компонент 538 может поддерживать или удерживать датчики. В некоторых вариантах осуществления сортировочные ворота 508 могут содержать соединительный компонент 540. Соединительный компонент 540 может соединять конструкцию внешней рамы сортировочного весового оборудования 504 с конструкцией внутренней рамы сортировочного весового оборудования 504, которая будет проиллюстрирована ниже.
На ФИГ. 5F представлена конструкция внутренней рамы сортировочного весового оборудования 504 согласно иллюстративным вариантам исполнения настоящего раскрытия. Как показано, в некоторых вариантах осуществления сортировочное весовое оборудование 504 может включать в себя входные ворота 502, выходные ворота 506, цилиндр 518 и электромагнитный клапан 520 цилиндра, как описано выше. В некоторых вариантах осуществления сортировочное весовое оборудование 504 также может включать в себя раму 542 ворот и швеллерную раму 544. Рама 542 ворот и швеллерная рама 544 могут образовать канал 546 для прохождения объектов через сортировочные ворота 508.
Как показано на фиг. 5F, в некоторых вариантах осуществления сортировочное весовое оборудование 504 может включать в себя бесконтактный переключатель 548. Бесконтактный переключатель 548 может обнаружить состояние входных ворот 502 и отправлять результат в модуль 522 управления входными воротами для управления входными воротами 502. Например, когда бесконтактный переключатель 548 обнаруживает, что входные ворота 502 не закрыты, он отправляет результат в модуль 522 управления входными воротами. Модуль 522 управления входными воротами может закрывать входные ворота 502 некоторое число раз или создать предупреждающий сигнал, указывающий, что входные ворота 502 закрыты неправильно, как описано выше.
Как показано на фиг. 5F, в некоторых вариантах осуществления сортировочное весовое оборудование 504 может включать в себя ограничивающее устройство 550, которое может предотвращать укладывание объектов. Ограничивающее устройство 550 может создавать сигнал или использовать механизм предотвратить укладывания объектов внутри сортировочного весового оборудования 504. Это может облегчать прохождение объектов через сортировочное весовое оборудование 504.
Как показано на фиг. 5F, в некоторых вариантах осуществления сортировочное весовое оборудование 504 может включать в себя маркировочное устройство 552. Маркировочное устройство 552 может оставлять маркировку на объекте при обнаружении отклонения объекта от нормы. Например, когда датчики, такие как некоторые медицинские датчики, обнаруживают потенциальную вирусную инфекцию объекта, маркировочное устройство 552 может оставлять на объекте маркировку. В некоторых вариантах осуществления маркировочным устройством 552 может быть устройство распыления краски.
Как показано на фиг. 5F, в некоторых вариантах осуществления сортировочное весовое оборудование 504 может включать в себя соединительный шток 554. Конструкцию внешней рамы сортировочного весового оборудования 504 и конструкцию внутренней рамы сортировочного весового оборудования 504 можно соединить вместе через соединительный шток 554.
На ФИГ. 6 представлена технологическая схема, иллюстрирующая различные операции в способе 600 сортировки объектов согласно иллюстративным вариантам исполнения настоящего раскрытия. Способ 600 может выполняться устройством 116, которое описано выше со ссылкой на Фиг. 5A-5F. В некоторых вариантах исполнения, как показано на фиг. 6, в блоке 602 устройство 116 можно инициализировать. Например, для инициализации устройство 116 может получить эталонную пороговую массу от сервера 102. В блоке 604 устройство 116 может закрыть выходные ворота 506 и открывать входные ворота 502, чтобы позволить объекту зайти на сортировочное весовое оборудование 504. Сортировочное весовое оборудование 504 может собирать массу объекта посредством датчиков. В блоке 606 устройство 116 может определить, выше ли собранная масса объекта, чем заданная масса. Если нет («N»), объект мог не зайти на сортировочное весовое оборудование 504. В такой ситуации устройство 116 может продолжать отслеживать, выше ли собранная масса объекта, чем заданная масса. При определении, что масса объекта выше, чем заданная масса (т.е. «Y» в блоке 606), что может указывать, что объект зашел на сортировочное весовое оборудование 504, способ 600 может перейти в блок 608.
В блоке 608 устройство 116 может закрыть входные ворота 502. Устройство 116 может ждать в течение заданного периода времени, как показано в блоке 610. Вот почему модулю 522 управления входными воротами может понадобиться период времени для реального закрывания входных ворот 502. Например, пользователь устройства 116 может установить заданный период времени. В блоке 612 устройство 116 может определять, правильно ли закрыты входные ворота 502. Если нет, устройство 116 может закрывать входные ворота 502 некоторое число раз для обеспечения закрывания входных ворот 502. В блоке 614 устройство 116 может определять, имеет ли число раз пороговое значение (например, 5 раз). Если нет, устройство 116 может открыть входные ворота 502 и ждать в течение заданного периода времени, как показано в блоке 616 и блоке 618, соответственно. Из блока 618 способ 600 может вернуться назад в блок 608. Повтор способа 600 от блока 608 до блока 618 может обеспечить, что входные ворота 502 работают правильно. При этом устройство 116 может собирать посредством датчиков точные данные, относящиеся к объекту. При определении, что число раз имеет пороговое значение, устройство 116 может создать предупреждающий сигнал, как показано в блоке 620. Предупреждающий сигнал может уведомлять пользователя, что входные ворота 502 могут работать неправильно, например, из-за неисправности входных ворот 502. Процесс может перейти в блок 622.
С другой стороны, при определении в блоке 612, что входные ворота 502 закрыты правильно, процесс может перейти из блока 612 в блок 622. В блоке 622 устройство 116 может собирать и обрабатывать данные, относящиеся к объекту, такие как масса объекта. Например, устройство 116 может отфильтровывать ошибочные данные и рассчитывать среднее значение собранных данных. Устройство 116 может сохранять и загружать собранные данные на сервер 102 для передачи собранных данных другим, например, другим хозяйствам, мясокомбинатам или их клиентам, как показано в блоке 624. В блоке 626 устройство 116 может перемещать сортировочные ворота 508 на основании массы объекта с образованием прохода между выходными воротами 506 и одними из множества ворот 510. Например, как показано в блоке 628, когда масса объекта выше, чем эталонная пороговая масса, между выходными воротами 506 и воротами 510a можно образовать проход. Аналогично, проход можно образовать между выходными воротами 506 и воротами 510b или воротами 510c, как показано в блоке 630 и блоке 632, соответственно.
После образования в блоке 634 прохода устройство 116 может открывать выходные ворота 506. Как описано выше, открывание выходных ворот 506 после перемещения сортировочных ворот 508 может предотвратить случайное ранение объекта.
В блоке 636 устройство 116 может определять, ниже ли масса объекта, чем заданная масса. Если да, объект может покинуть сортировочное весовое оборудование 504 и войти в проход. В такой ситуации устройство 116 может закрыть выходные ворота 506, как показано в блоке 638. В блоке 640 устройство 116 может использовать механизм, например, повернуть сортировочные ворота 508, для облегчения прохождения объекта через проход и достижения одних из множества ворот 510.
Если в блоке 636 устройство 116 определяет, что масса объекта не ниже, чем заданная масса, это может указывать, что объект все еще находится внутри сортировочного весового оборудования 504. В такой ситуации устройство может использовать механизм для облегчения покидания объектом сортировочного весового оборудования 504 и прохода через выходные ворота 506. Например, в блоке 644 устройство 116 может определять, открыты ли выходные ворота 506 в течение заданного периода времени (например, 5 минут). Если нет, способ 600 может вернуться назад в 636. При определении, что выходные ворота 506 открыты в течение заданного периода времени, устройство 116 может открыть входные ворота 502, пока открыты выходные ворота 506, как показано в блоке 646. В такой ситуации другой объект может зайти на сортировочное весовое оборудование 504 через открытые входные ворота 502. Как описано выше, из-за ограниченного пространства сортировочного весового оборудования 504 другой объект может толкнуть или лягнуть объект, стоящий на сортировочном весовом оборудовании 504, вынуждая объект покинуть сортировочное весовое оборудование 504 и пройти через открытые выходные ворота 506.
Устройство 116 может отслеживать, ниже ли масса объекта, чем заданная масса, как показано в блоке 648. При определении, что масса объекта ниже, чем заданная масса, что может указывать, что объект покинул сортировочное весовое оборудование 504 и вошел в проход, устройство 116 может закрыть выходные ворота 506, сохранить информацию, указывающую состояние открывания входных ворот 502, открывая в то же время выходные ворота 506, как показано в блоке 650. Пользователь может иметь доступ к сохраненной информации.
Из блока 640 или блока 650 способ 600 может перейти в блок 642. В блоке 642 устройство 116 может очистить такие собранные данные, как масса объекта, до нуля. Способ 600 может перейти в блок 604 для начала сортировки других объектов по аналогии с описанным выше.
На ФИГ. 7 представлена технологическая схема, иллюстрирующая различные операции в способе 700 сортировки объектов согласно другим иллюстративным вариантам исполнения настоящего раскрытия. Как показано в блоке 702, способ 700 включает в себя открывание входных ворот 502, чтобы позволить объекту зайти на сортировочное весовое оборудование 504 через входные ворота 502. В блоке 704 способ 700 включает в себя получение массы объекта с использованием сортировочного весового оборудования 504. В блоке 706 способ 700 включает в себя перемещение сортировочных ворот 508 на основании массы объекта с образованием прохода между выходными воротами 506 и одними из множества ворот 510. После этого в блоке 708 способ 700 включает в себя открывание выходных ворот 506, чтобы позволить объекту пройти через проход и добраться до одних из множества ворот 510. На основании способа 700 объекты можно сортировать по разным зонам в соответствии с конкретными рыночными требованиями или требованиями кормления.
На ФИГ. 8 представлена технологическая схема, иллюстрирующая различные операции в способе 800 управления домашним скотом согласно иллюстративным вариантам исполнения настоящего раскрытия. Для того, чтобы помочь домашнему скоту эффективно проходить через множество ворот (например, входные ворота 502, выходные ворота 506, сортировочные ворота 508 и/или ворота 510) устройства 116, необходима подготовка домашнего скота для обеспечения, что домашний скот приучен к устройству 116. Как показано в блоке 802, способ 800 может предусматривать подготовку домашнего скота. В некоторых вариантах осуществления в блоке 802 множество ворот (например, входные ворота 502, выходные ворота 506, сортировочные ворота 508 и ворота 510) устройства 116 по умолчанию все можно открыть для предотвращения случайного ранения домашнего скота.
В блоке 804 способ 800 может предусматривать настройку параметров, относящихся к домашнему скоту. В некоторых вариантах осуществления параметры, относящиеся к домашнему скоту, можно получить от сервера 102 через шлюз 114 сбора данных. В некоторых вариантах осуществления параметры, относящиеся к домашнему скоту, может настроить пользователь системы 112.
В блоке 806 способ 800 может предусматривать сортировку домашнего скота в режиме кормления. В режиме кормления домашний скот можно сортировать по разным зонам, имеющим разные корма. Например, домашний скот, отсортированный в зону 406 низкой массы, может иметь корма с более высокой питательностью, а домашний скот, отсортированный в зону 410 высокой массы, может иметь корма с более низкой питательностью. Сортировка домашнего скота в режиме кормления может уменьшить разницу масс среди домашнего скота и, следовательно, может обеспечить фазовое кормление домашнего скота для увеличения дохода хозяйств.
В блоке 808 способ 800 может предусматривать сортировку домашнего скота в рыночном режиме. В рыночном режиме домашний скот можно сортировать на две зоны, такие как рыночная зона и зона ожидания. Например, домашний скот, отсортированный в рыночную зону, можно продать на рынке, а скот, отсортированный в зону ожидания, можно продолжать кормить в хозяйстве 110. Сортировка домашнего скота в рыночном режиме может автоматически отсортировать домашний скот, подходящий для продажи на рынке, и, следовательно, может значительно уменьшить трудозатраты.
На ФИГ. 9 представлены аппаратные компоненты контроллера 512 согласно иллюстративным вариантам исполнения настоящего раскрытия. Как показано, в некоторых вариантах осуществления контроллер 512 может содержать CPU 902 для выполнения команд, хранящихся в памяти 904.
Как описано выше, в некоторых вариантах осуществления контроллер 512 может содержать один или более модулей, таких как модуль 522 управления входными воротами, модуль 526 управления сортировочными воротами и модуль 528 управления выходными воротами. В некоторых вариантах осуществления эти модули можно соединить с CPU 902, и они могут управлять воротами (например, входными воротами 502, сортировочным весовым оборудованием 504 и выходными воротами 506) через соответствующий электромагнитный клапан цилиндра на основании команд, предоставленных CPU 902. В некоторых вариантах осуществления контроллер 512 может содержать модуль 916 управления маркировкой, соединенный с CPU 902. Например, модуль 522 управления входными воротами может управлять состоянием входных ворот 502 через электромагнитный клапан 906 цилиндра входных ворот. Аналогично, модуль 526 управления сортировочными воротами и модуль 528 управления выходными воротами может управлять состоянием сортировочных ворот 508 и выходных ворот 506 через электромагнитный клапан 908 цилиндра сортировочных ворот и электромагнитный клапан 910 цилиндра выходных ворот, соответственно.
Как показано на фиг. 9, в некоторых вариантах осуществления контроллер 512 может содержать модуль 524 сбора данных, соединенный с CPU 902. В некоторых вариантах осуществления модуль 524 сбора данных может собирать данные, измеренные датчиком 912 массы, и передавать данные в CPU 902 для обработки.
Как описано выше, устройство 116 может содержать приемник 516 сигналов для извлечения информации из уникального идентификатора, такого как RFID объекта. Как показано на фиг. 9, в некоторых вариантах осуществления контроллер 512 может содержать модуль 914 обнаружения ID, соединенный с CPU 902. Модуль 914 обнаружения ID может обнаружить RFID объекта в информации, извлеченной из приемника 516 сигналов, и передавать извлеченную информацию в память 904 контроллера 512 для сохранения.
Как показано на фиг. 9, в некоторых вариантах осуществления контроллер 512 может содержать модуль 916 управления маркировкой, соединенный с CPU 902. Модуль 916 управления маркировкой может управлять состоянием маркировочного устройства 552 через электромагнитный клапан 918 цилиндра маркировочного устройства. Например, когда датчики обнаруживают потенциальную вирусную инфекцию объекта, модуль 916 управления маркировкой может управлять маркировочным устройством 552, оставляя на объекте маркировку.
Как описано выше, бесконтактный переключатель 548 может обнаруживать состояние входных ворот 502 и отправлять результат в модуль 522 управления входными воротами для управления входными воротами 502. В некоторых вариантах осуществления бесконтактный переключатель 548 может отправлять результат в CPU 902, который может отправлять команды на основании результата в модуль 522 управления входными воротами для управления входными воротами 502.
Как показано на фиг. 9, в некоторых вариантах осуществления контроллер 512 может содержать приемопередающий модуль 920 CAN, соединенный с CPU 902. Приемопередающий модуль 920 CAN может получать параметры, относящиеся к объектам, от сервера 102 и загружать на сервер 102 данные, собранные посредством датчиков.
Как показано на фиг. 9, в некоторых вариантах осуществления контроллер 512 может содержать модуль 922 цепи питания, соединенный с CPU 902. Модуль 922 цепи питания может обеспечить выходное напряжение 924 для системы. В некоторых вариантах осуществления контроллер 512 может содержать модуль 926 обработки изображений, соединенный с CPU 902. Модуль 926 обработки изображений может управлять дисплеем 928 для отображения данных, собранных посредством датчиков. В некоторых вариантах осуществления контроллер 512 может содержать модуль 930 управления вводом/выводом данных, соединенный с CPU 902. Модуль 930 управления вводом/выводом данных может быть соединен с клавиатурой 932, чтобы позволить пользователям системы 112 вводить информацию.
Некоторые варианты исполнения можно реализовать в виде компьютерного программного продукта, который может включать в себя команды, сохраненные на машиночитаемом носителе. Эти команды можно использовать для программирования процессора общего назначения или специального назначения для проведения описанных операций. Машиночитаемый носитель содержит любой механизм для сохранения или передачи информации в форме (например, программного обеспечения, обрабатывающего приложения) читаемой машиной (например, компьютером). Машиночитаемый носитель может включать в себя, но без ограничения, магнитный запоминающий носитель (например, гибкую дискету); оптический запоминающий носитель (например, CD-ROM); магнитно-оптический запоминающий носитель; постоянное запоминающее устройство (ROM); оперативное запоминающее устройство (RAM); стираемое программируемое запоминающее устройство (например, EPROM и EEPROM); флэш-память; или другой тип носителя, подходящий для сохранения электронных команд. Машиночитаемый носитель можно называть энергонезависимый машиночитаемый носитель.
Способы и иллюстративные примеры, описанные в настоящем документе, не связаны по своей сути с каким-либо конкретным компьютером или другим устройством. В соответствии с идеями, описанными в настоящем документе, можно использовать разные системы общего назначения, или может оказаться удобным создать более специализированное устройство для выполнения требуемых стадий способа. Требуемая конструкция для множества этих систем будет выглядеть, как изложено в описании выше.
Приведенное выше описание предназначено для иллюстрации, а не для ограничения. Хотя настоящее раскрытие было описано со ссылками на конкретные иллюстративные примеры, будет понятно, что настоящее раскрытие не ограничено описанными примерами. Объем раскрытия нужно определять со ссылкой на следующую формулу изобретения, наряду с полным объемом эквивалентов, на которые имеет право формула изобретения.
В рамках настоящего изобретения, если в контексте явно не указано иное, форма единственного числа предназначена охватывать также формы множественного числа. Кроме того, должно быть понятно, что термины «содержит», «содержащий», «включает» и/или «включающий» в рамках настоящего изобретения означают наличие указанных признаков, целых чисел, стадий, операций, элементов и/или компонентов, но не исключают наличие или добавление одного или более других признаков, целых чисел, стадий, операций, элементов, компонентов и/или их групп. Также, термины «первый», «второй», «третий», «четвертый» и так далее в рамках настоящего изобретения предназначены для указания на проведение различия между разными элементами и не обязательно могут иметь смысл порядка согласно их числовому обозначению. Следовательно, терминология, используемая в настоящем документе, предназначены для цели описания только конкретных вариантов исполнения и не предназначена для ограничения.
Также следует заметить, что в некоторых альтернативных вариантах исполнения отмеченные функции/действия могут происходить вне указанного на фигурах порядка. Например, две фигуры, показанные последовательно, фактически можно выполнять по существу одновременно или иногда можно выполнять в обратном порядке, в зависимости от задействованных функций/действий.
Хотя операции способа были описаны в конкретном порядке, необходимо понимать, что между описанными операциями можно выполнять другие операции, описанные операции можно отрегулировать таким образом, чтобы они происходили в немного разные моменты времени, или описанными операции можно распределить в системе, что позволяет выполнять обрабатывающие операции с разными интервалами, связанными с обработкой.
Различные блоки, схемы или другие компоненты могут быть описаны или заявлены как «выполненные с возможностью» или «могут быть выполнены с возможностью» выполнения задачи или задач. В таких контекстах выражение «выполненные с возможностью» или «могут быть выполнены с возможностью» используется для обозначения структуры, указывающей, что блоки/схемы/компоненты содержат конструкцию (например, схему), которая выполняет задачу или задачи в процессе работы. Таким образом, можно сказать, что блок/схема/компонент выполнен с возможностью выполнения задачи, или может быть выполнен с возможностью выполнения задачи, даже когда указанный блок/схема/компонент в настоящее время не работает (например, не включен). Блоки/схемы/компоненты, используемые с выражением «выполнен с возможностью» или «могут быть выполнены с возможностью» включают в себя аппаратные средства - например, схемы, память с сохраненными командами программы, выполняемыми для выполнения работы и так далее. Выражение, что блок/схема/компонент «выполнен с возможностью» выполнения одной или более задач, или «может быть выполнен с возможностью» выполнения одной или более задач, прямо не предназначено для ссылки на 35 U.S.C. 112(f) для этого блока/схемы/компонента. Кроме того, «выполнен с возможностью» или «может быть выполнен с возможностью» может включать в себя универсальную конструкцию (например, универсальную схему), которой манипулирует программное обеспечение и/или встроенное программное обеспечение (например, FPGA или программное обеспечение, выполняемое процессором общего назначения) для работы таким образом, чтобы имелась возможность выполнения поставленной задачи (задач). «Выполнен с возможностью» также может включать в себя адаптацию производственного процесса (например, установки для изготовления полупроводников) для изготовления устройств (например, интегральных схем), которые выполнены с возможностью исполнения или выполнения одной или более задач. «Могут быть выполнены с возможностью» явно предназначено не для применения к пустым носителям, незапрограммированному процессору или незапрограммированному универсальному компьютеру, или незапрограммированному программируемому логическому устройству, программируемой логической матрице или другому незапрограммированному устройству без сопровождения запрограммированного носителя, который придает незапрограммированному устройству возможность выполнения раскрытой функции (функций).
Специалисту в области, к которой относится раскрытие, может прийти в голову множество модификаций и других вариантов исполнения раскрытия, изложенного в настоящем документе, получающих пользу от идей, представленных в приведенном выше описании и связанных с фигурами. Следовательно, нужно понять, что раскрытие не следует ограничивать конкретными раскрытыми вариантами исполнения и что модификации и другие варианты исполнения предназначены для включения в объем приложенной формулы изобретения. Кроме того, хотя в вышеизложенном описании и на связанных с ним фигурах иллюстративные варианты исполнения описаны в контексте некоторых иллюстративных комбинаций элементов и/или функций, нужно понять, что в альтернативных вариантах исполнения можно предоставить разные комбинации элементов и/или функций без отклонения от объема приложенной формулы изобретения. В связи с этим, например, также предусмотрены иные комбинации элементов и/или функций, чем те, которые явно описаны выше, и которые могут быть изложены в некоторых из прилагаемых пунктов формулы изобретения. Хотя в настоящем документе использованы конкретные термины, они использованы только в общем и описательном смысле, а не в целях ограничения.
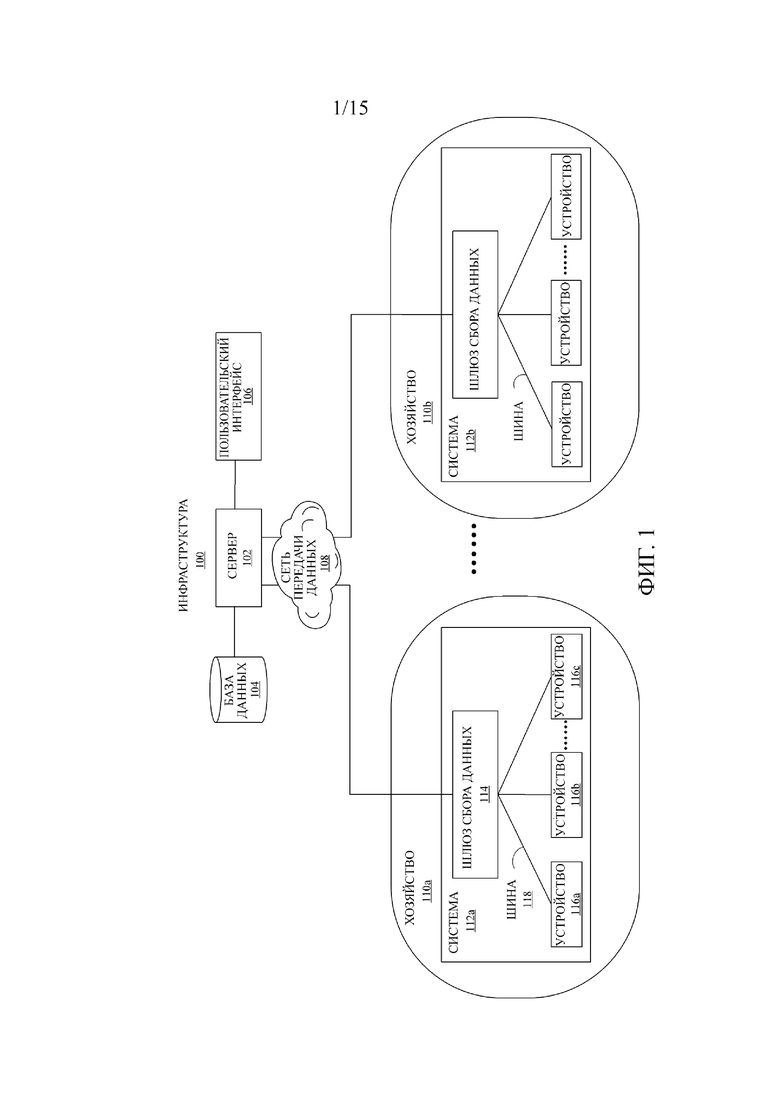
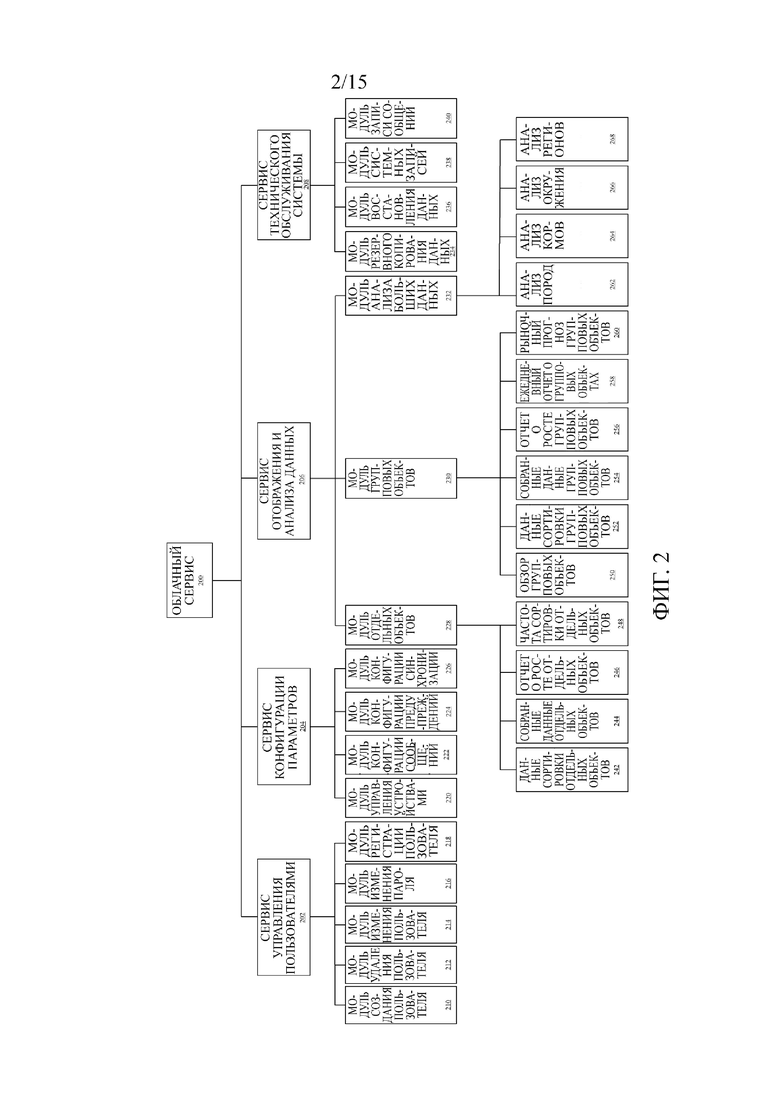
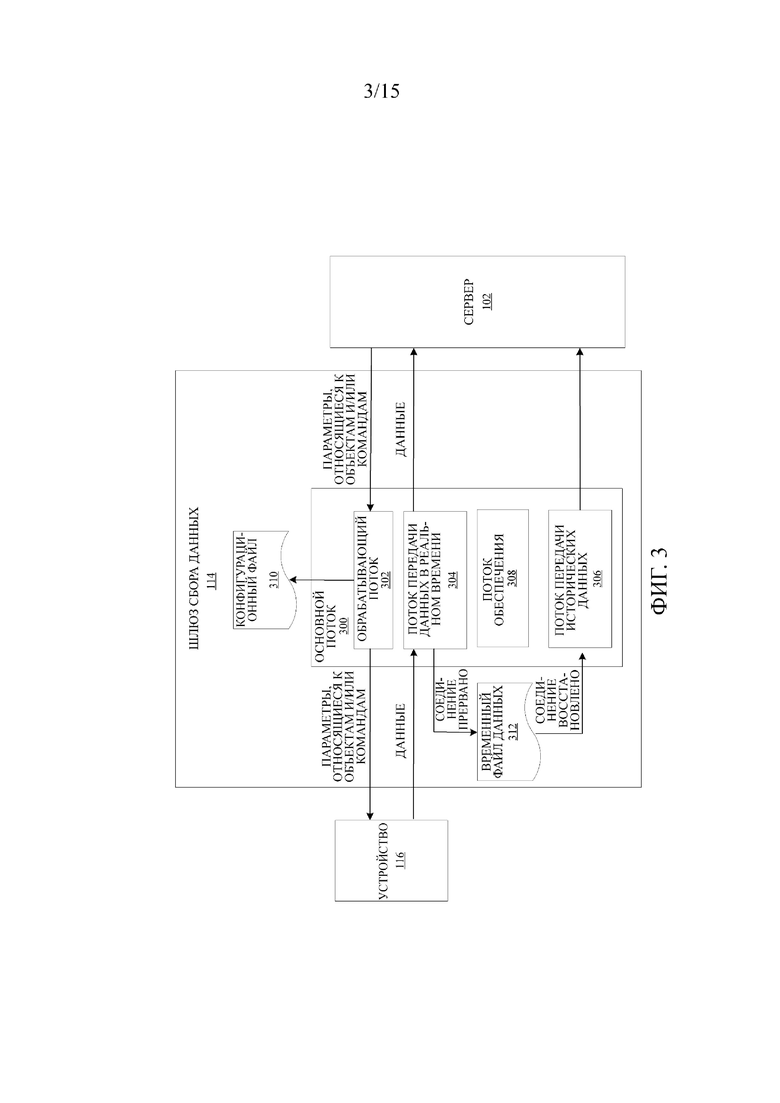
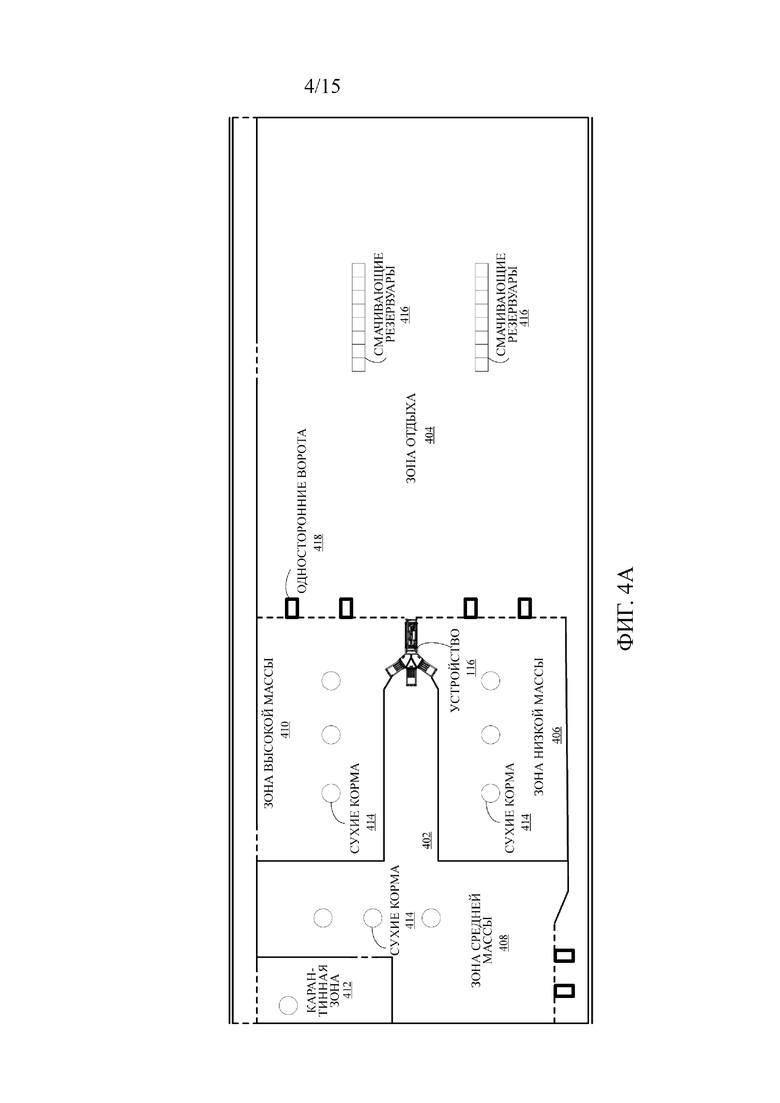
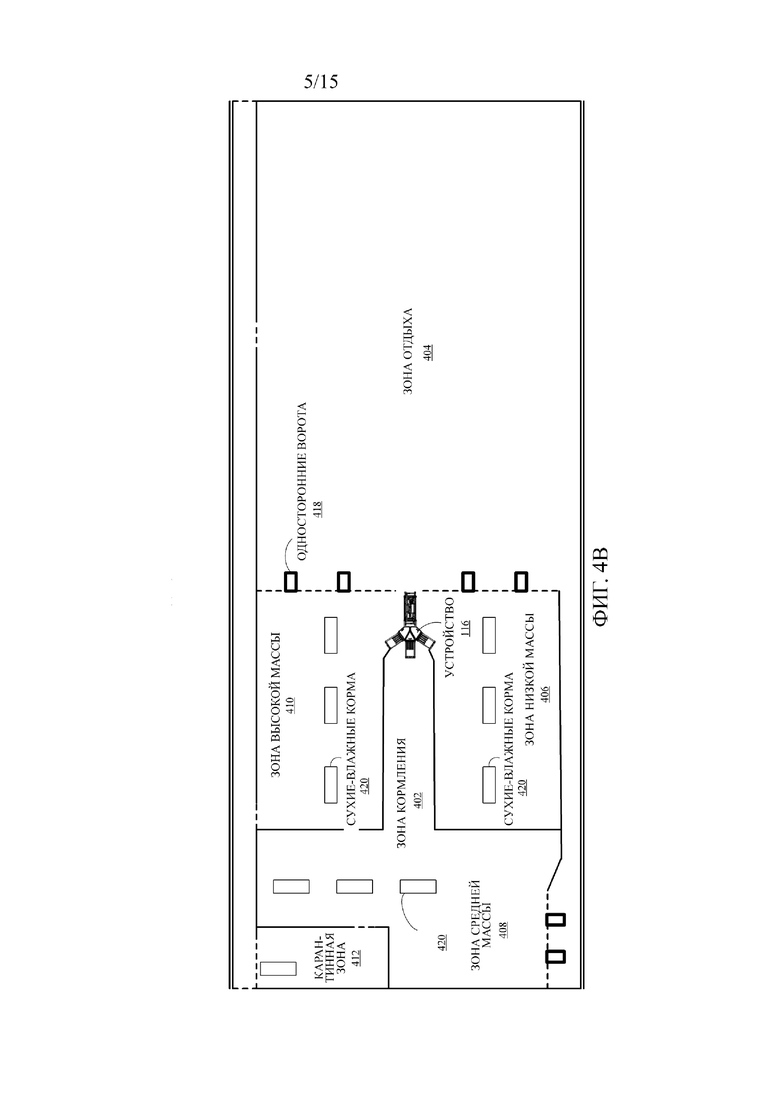
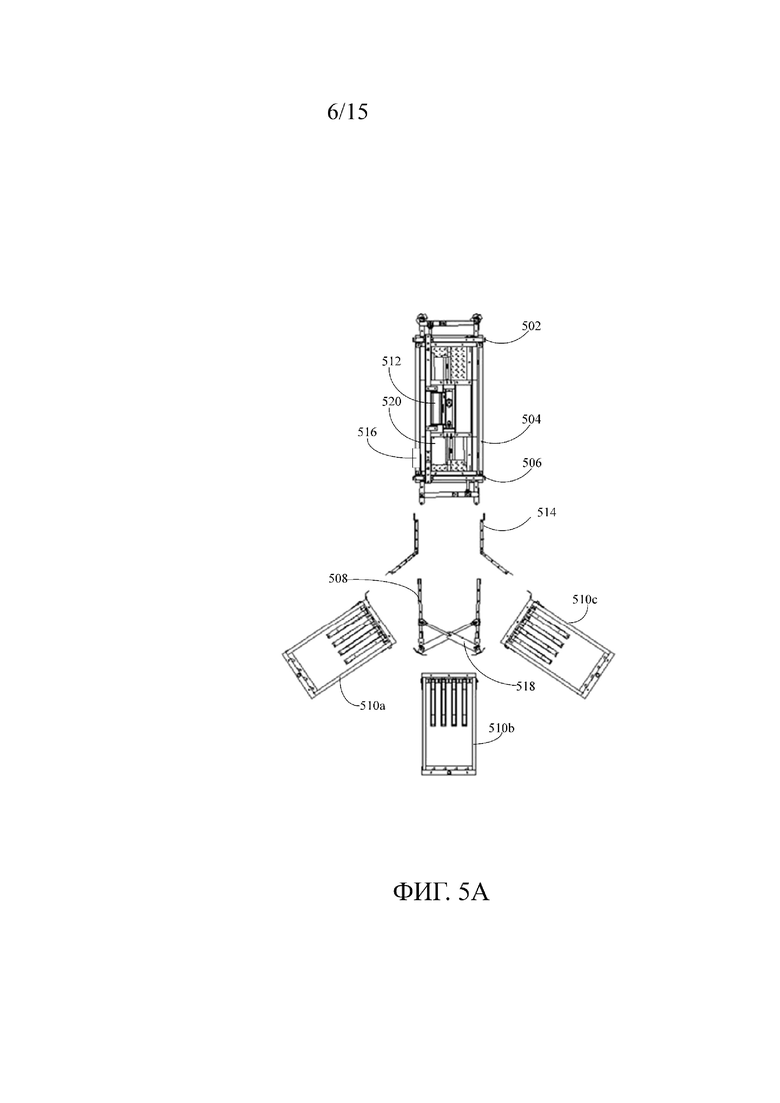
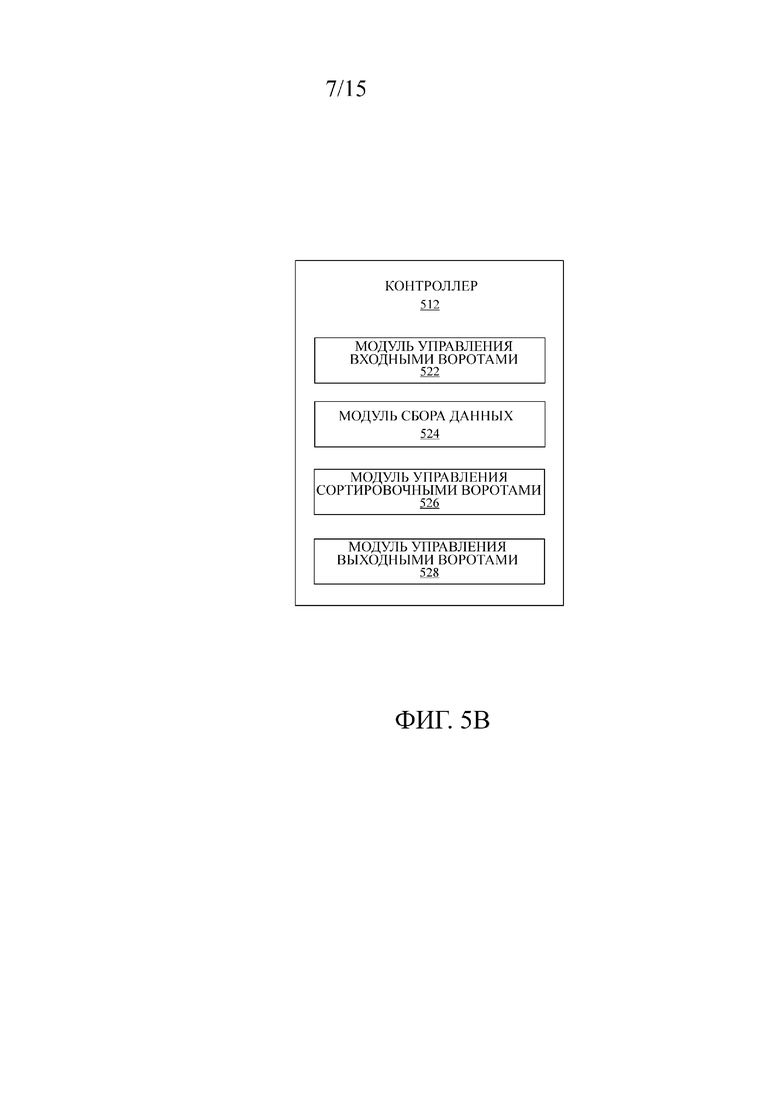
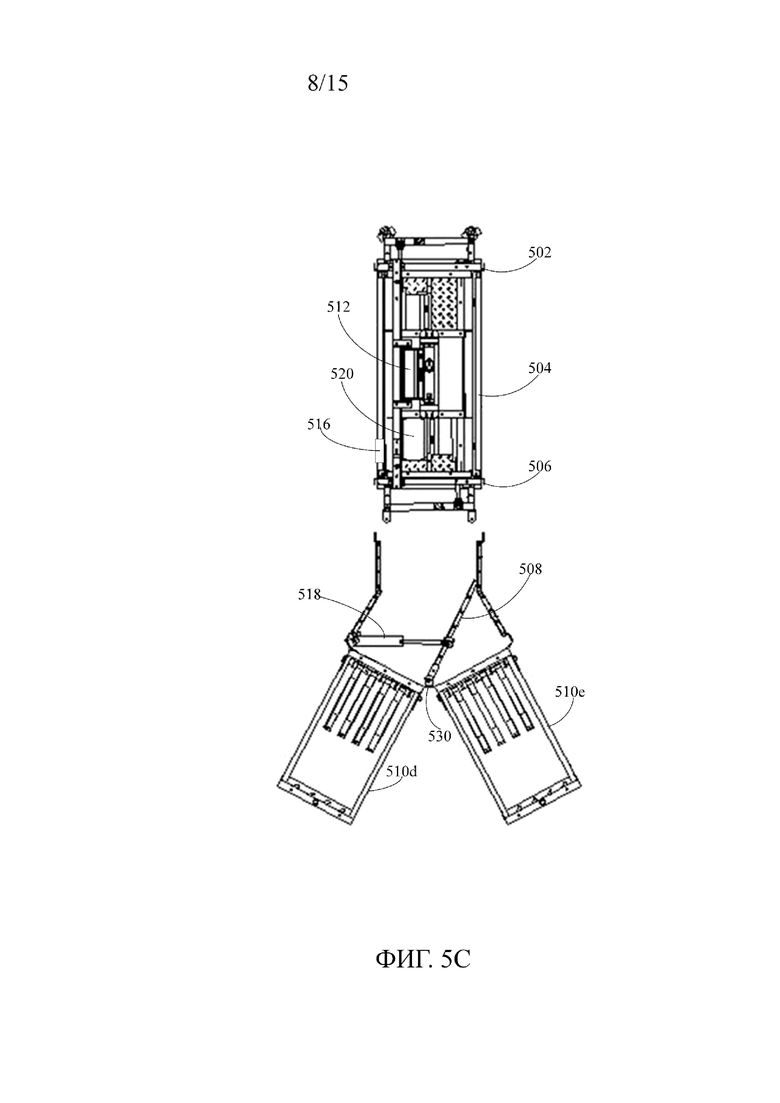
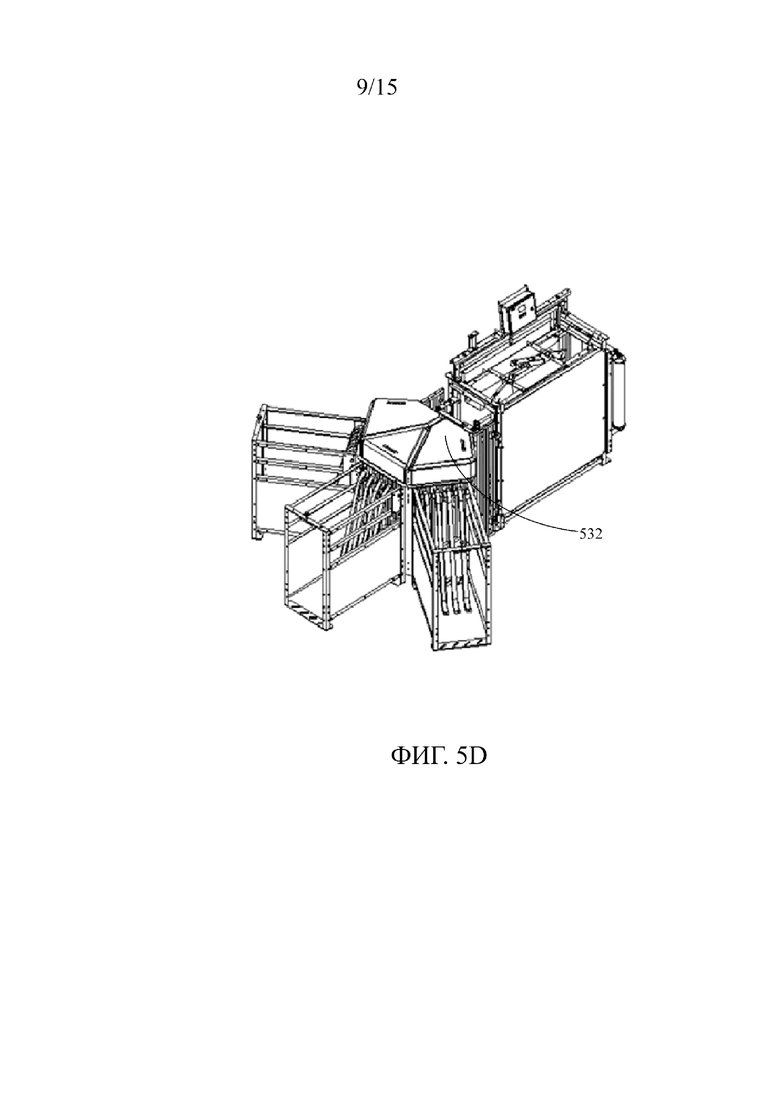
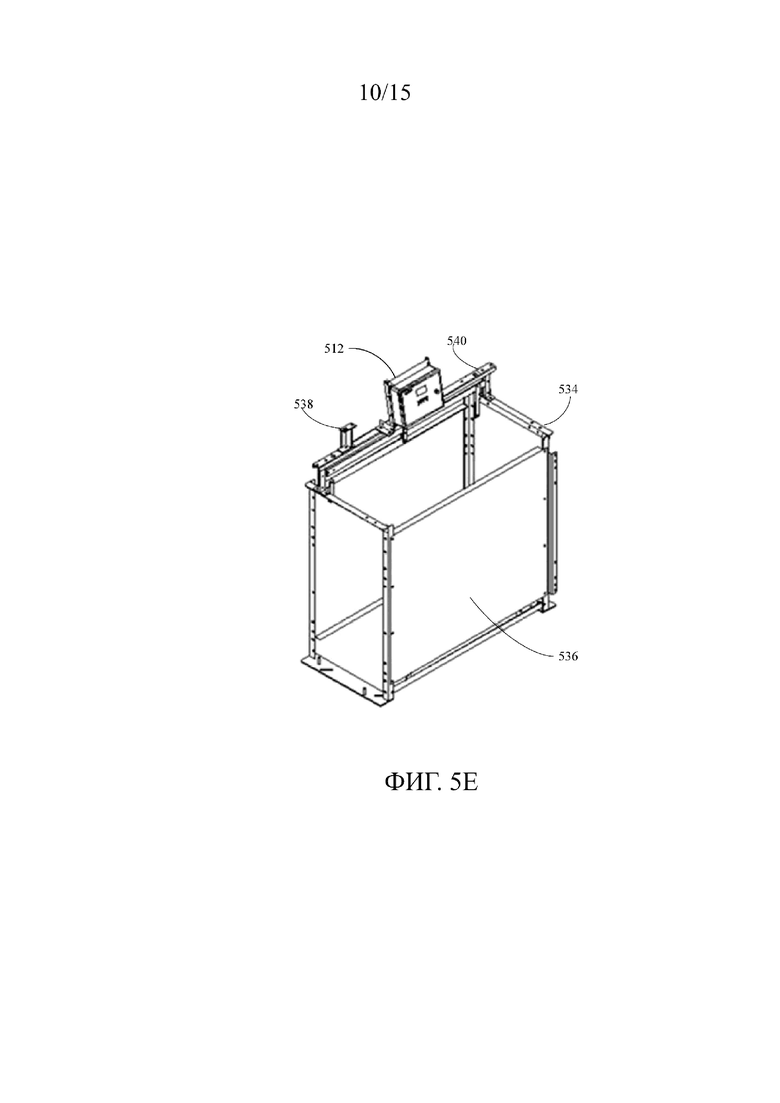
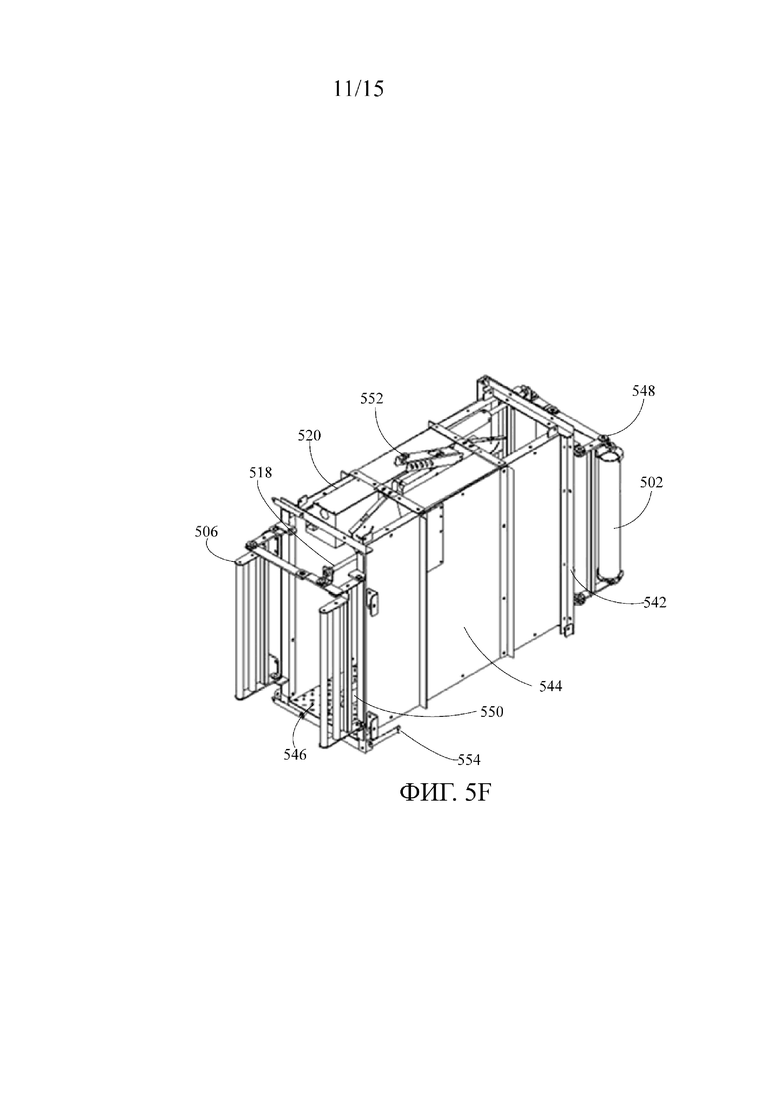
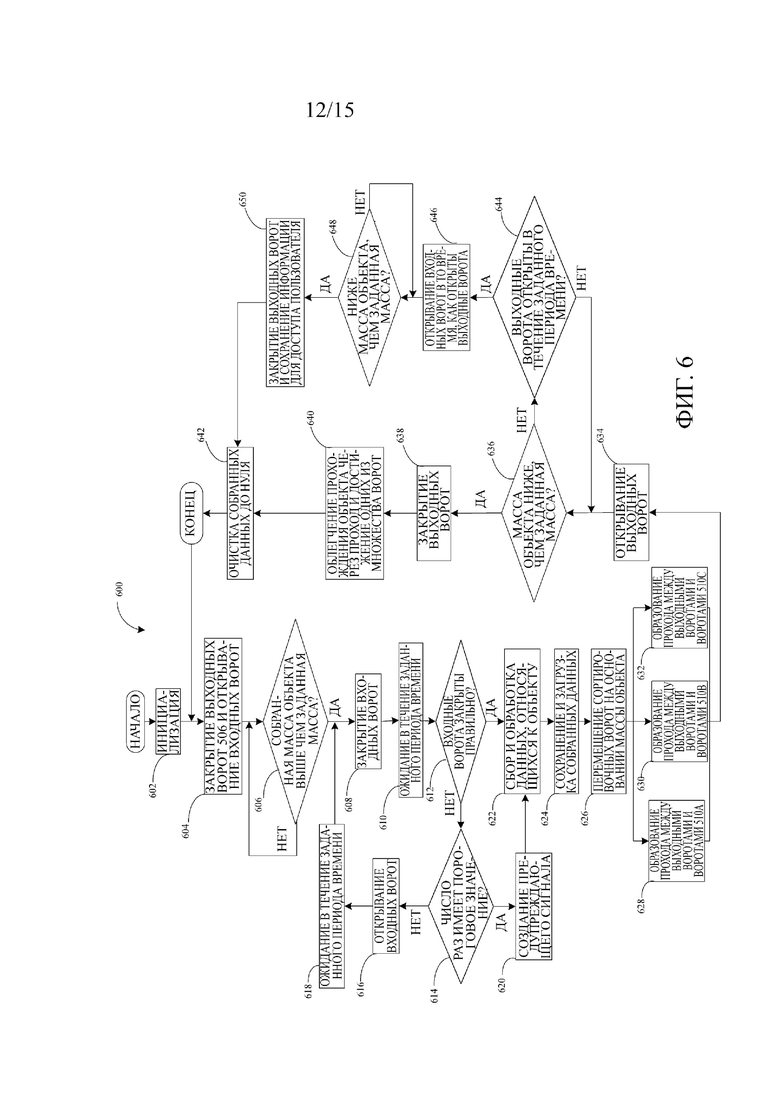
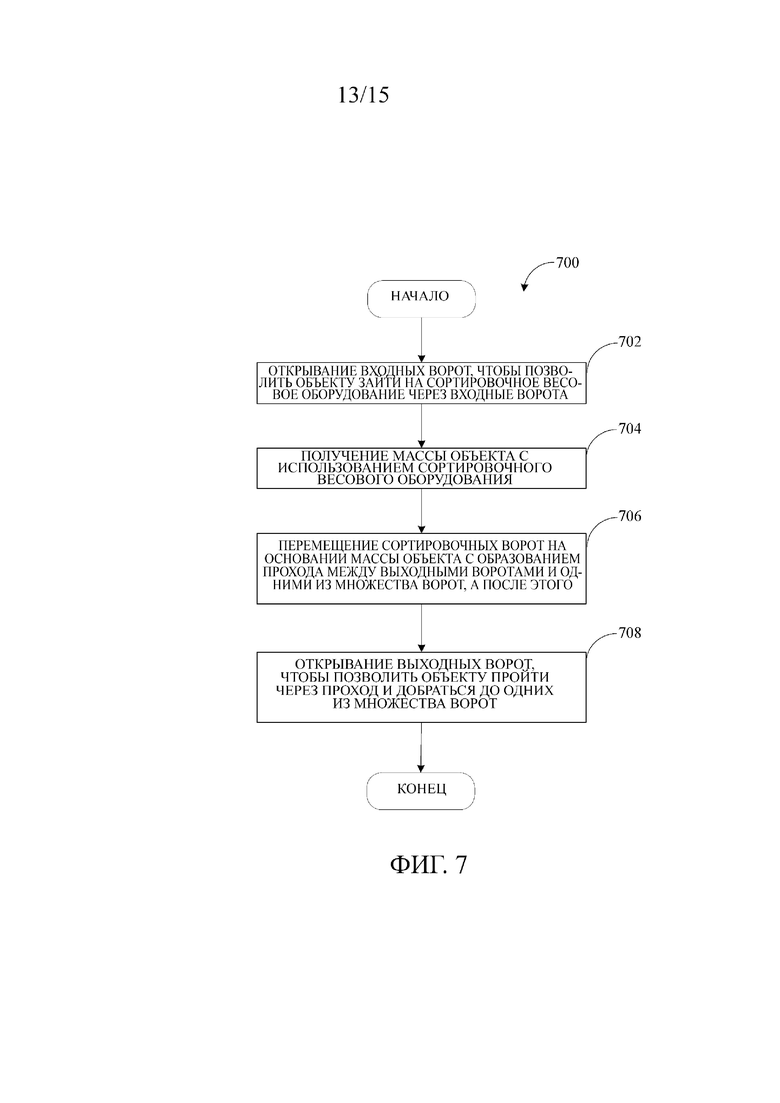
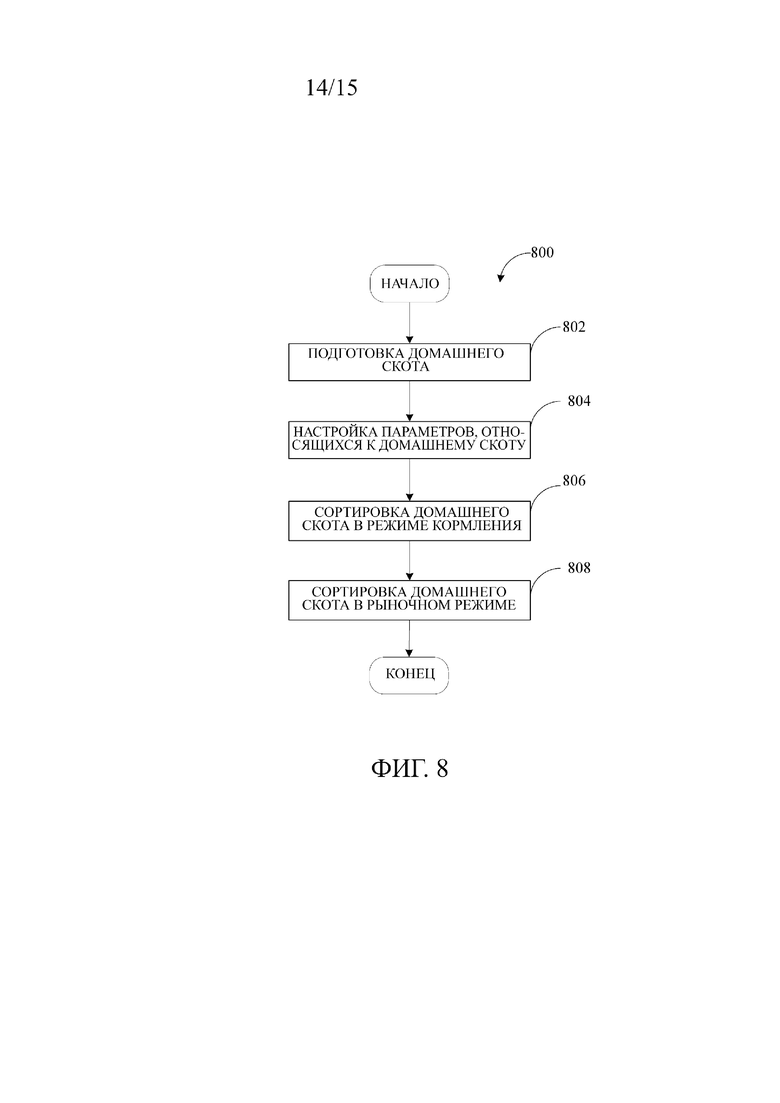
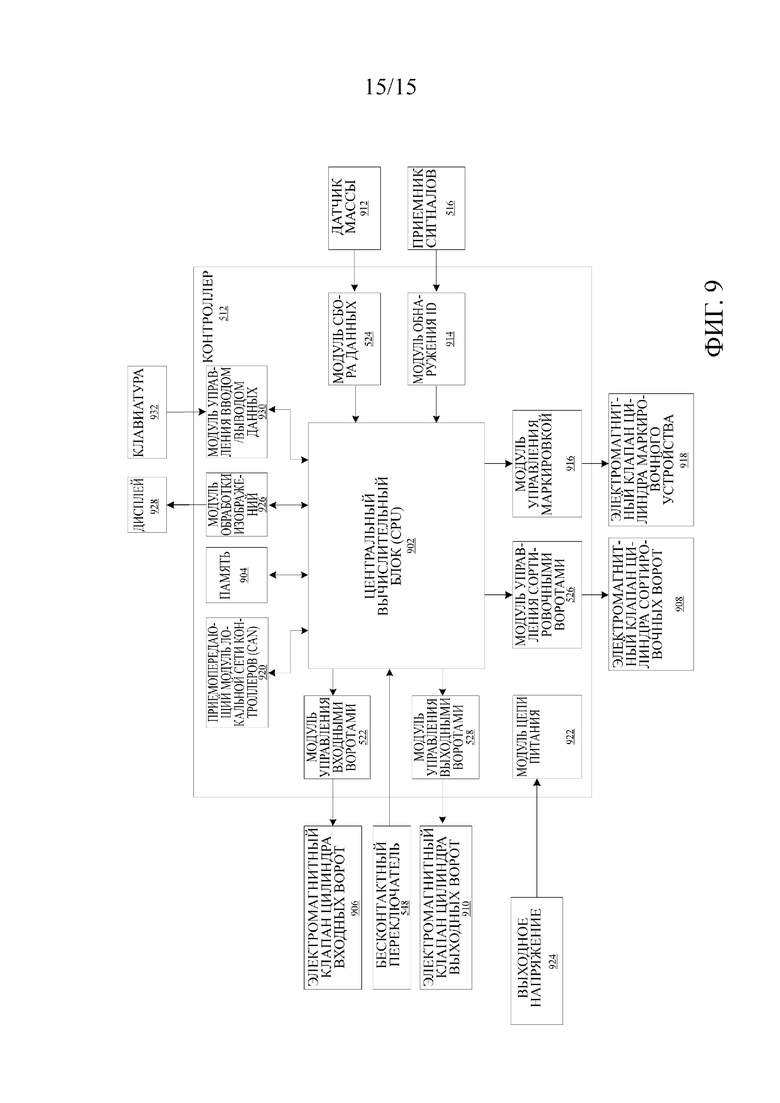
Группа изобретений относится к управлению объектами, такими как домашний скот, в частности к системе для управления объектами животноводческого хозяйства, использующей устройства для сортировки объектов, и способу сортировки объектов для животноводческого хозяйства, исполняемый устройством сортировки объектов. Система для управления объектами животноводческого хозяйства содержит шлюз сбора данных и множество устройств сортировки объектов. Каждое из указанных устройств выполнено с возможностью получения параметров, относящихся к объектам в животноводческом хозяйстве, от сервера через шлюз сбора данных, причем параметры включают в себя эталонную пороговую массу объектов. Устройство сортировки объектов выполнено также с возможностью сбора масс объектов посредством датчиков, регулировки эталонной пороговой массы на основании полученных параметров для создания отрегулированной пороговой массы и сортировки объектов по разным зонам в животноводческом хозяйстве на основании отрегулированной пороговой массы и собранных масс. Устройство сортировки объектов для животноводческого хозяйства содержит входные ворота, сортировочное весовое оборудование, соединенное с входными воротами, выходные ворота, соединенные с сортировочным весовым оборудованием, сортировочные ворота, множество ворот, соединенных с сортировочными воротами, а также процессор и память с сохраненными выполняемыми командами. Указанные команды в ответ на выполнение процессором вызывают выполнение устройством сортировки объектов открывания входных ворот, чтобы позволить объекту зайти на сортировочное весовое оборудование через входные ворота. Затем осуществляется получение массы объекта с использованием сортировочного весового оборудования, перемещение сортировочных ворот на основании массы объекта с образованием прохода между выходными воротами и одними из множества ворот, а после этого открывание выходных ворот, чтобы позволить объекту пройти через проход и добраться до одних из множества ворот. Достигаемый при этом технический результат заключается в обеспечении возможности эффективно сортировать домашний скот в отдельных группах или собирать точные данные, относящиеся к домашнему скоту, без повторной подготовки домашнего скота. 3 н. и 17 з.п. ф-лы, 15 ил.
1. Система для управления объектами животноводческого хозяйства, содержащая:
шлюз сбора данных; и
множество устройств сортировки объектов, каждое из которых выполнено с возможностью:
получения параметров, относящихся к объектам в животноводческом хозяйстве, от сервера через шлюз сбора данных, причем параметры включают в себя эталонную пороговую массу объектов;
сбора масс объектов посредством датчиков;
регулировки эталонной пороговой массы на основании полученных параметров для создания отрегулированной пороговой массы; и
сортировки объектов по разным зонам в животноводческом хозяйстве на основании отрегулированной пороговой массы и собранных масс.
2. Система по п. 1, в которой каждое из множества устройств сортировки объектов выполнено с возможностью автоматически регулировать эталонную пороговую массу на основе медианной массы объектов или средней массы объектов.
3. Система по п. 1, в которой одно или более из множества устройств сортировки объектов, кроме того, выполнены с возможностью загрузки отрегулированных пороговых масс одного или более из множества устройств сортировки объектов на сервер через шлюз сбора данных для сохранения отрегулированных пороговых масс в базе данных.
4. Система по п. 1, в которой по меньшей мере одно из множества устройств сортировки объектов выполнено с возможностью регулировки эталонной пороговой массы на основании отрегулированной пороговой массы по меньшей мере еще одного устройства сортировки объектов из множества устройств сортировки объектов.
5. Система по п. 1, в которой каждое из множества устройств сортировки объектов соединено со шлюзом сбора данных посредством шины данных.
6. Система по п. 1, в которой параметры, относящиеся к объектам, включают в себя по меньшей мере:
количество объектов;
диапазон рыночных масс;
рыночную цену объектов; и
массы других объектов по меньшей мере из еще одного животноводческого хозяйства.
7. Система по п. 1, причем объекты включают в себя домашний скот.
8. Устройство сортировки объектов для животноводческого хозяйства, содержащее:
входные ворота;
сортировочное весовое оборудование, соединенное с входными воротами;
выходные ворота, соединенные с сортировочным весовым оборудованием;
сортировочные ворота;
множество ворот, соединенных с сортировочными воротами; и
процессор и память с сохраненными выполняемыми командами, которые в ответ на выполнение процессором вызывают выполнение устройством сортировки объектов следующего:
открывания входных ворот, чтобы позволить объекту зайти на сортировочное весовое оборудование через входные ворота;
получения массы объекта с использованием сортировочного весового оборудования;
перемещения сортировочных ворот на основании массы объекта с образованием прохода между выходными воротами и одними из множества ворот; а после этого открывания выходных ворот, чтобы позволить объекту пройти через проход и добраться до одних из множества ворот.
9. Устройство сортировки объектов по п. 8, причем устройство сортировки объектов, обеспечивающее перемещение сортировочных ворот на основании массы объекта, предусматривает обеспечение:
определения пороговой массы на основании параметров, относящихся к множеству объектов, полученных от сервера;
проведения сравнения между массой объекта и пороговой массой; и
перемещения сортировочных ворот на основании сравнения с образованием прохода.
10. Устройство сортировки объектов по п. 9, отличающееся тем, что в памяти хранятся дополнительные выполняемые команды, которые в ответ на выполнение процессором дополнительно вызывают выполнение устройством сортировки объектов следующего:
получения масс множества объектов с использованием сортировочного весового оборудования; и
загрузки масс на сервер для сохранения масс в базе данных.
11. Устройство сортировки объектов по п. 8, отличающееся тем, что в памяти хранятся дополнительные выполняемые команды, которые в ответ на выполнение процессором дополнительно вызывают выполнение устройством сортировки объектов следующего:
закрывания входных ворот определенное число раз, при этом указанное определенное число раз составляет не менее двух; и
при определении, что определенное число раз имеет пороговое значение, создания предупреждающего сигнала, указывающего, что входные ворота не закрыты.
12. Устройство сортировки объектов по п. 8, отличающееся тем, что в памяти хранятся дополнительные выполняемые команды, которые в ответ на выполнение процессором дополнительно вызывают выполнение устройством сортировки объектов следующего:
определения, что объект находится внутри сортировочного весового оборудования в течение заданного периода времени; и в ответ
использования механизма или создания сигнала, стимулирующего прохождение объекта через выходные ворота.
13. Устройство сортировки объектов по п. 8, отличающееся тем, что в памяти хранятся дополнительные выполняемые команды, которые в ответ на выполнение процессором дополнительно вызывают выполнение устройством сортировки объектов следующего:
определения, что объект находится внутри сортировочного весового оборудования в течение заданного периода времени; и в ответ
открывания входных ворот, в то время как выходные ворота открыты, для облегчения прохождения объекта через выходные ворота, позволяя другому объекту зайти на сортировочное весовое оборудование через входные ворота.
14. Устройство сортировки объектов по п. 8, отличающееся тем, что в памяти хранятся дополнительные выполняемые команды, которые в ответ на выполнение процессором дополнительно вызывают выполнение устройством сортировки объектов следующего:
поворота сортировочных ворот для облегчения прохождения объекта через проход и достижения одних из множества ворот.
15. Способ сортировки объектов для животноводческого хозяйства, исполняемый устройством сортировки объектов для животноводческого хозяйства, причем устройство сортировки объектов содержит входные ворота, сортировочное весовое оборудование, выходные ворота, сортировочные ворота и множество ворот, причем указанный способ предусматривает:
открывание входных ворот, чтобы позволить объекту зайти на сортировочное весовое оборудование через входные ворота;
получение массы объекта с использованием сортировочного весового оборудования;
перемещение сортировочных ворот на основании массы объекта с образованием
прохода между выходными воротами и одними из множества ворот; а после этого открывание выходных ворот, чтобы позволить объекту пройти через проход и добраться до одних из множества ворот.
16. Способ сортировки объектов по п. 15, отличающийся тем, что перемещение сортировочных ворот на основании массы объекта предусматривает:
определение пороговой массы на основании параметров, относящихся к множеству объектов, полученных от сервера;
проведение сравнения между массой объекта и пороговой массой; и
перемещение сортировочных ворот на основании сравнения с образованием прохода.
17. Способ сортировки объектов по п. 15, дополнительно предусматривающий:
закрывание входных ворот определенное число раз, причем указанное определенное число раз составляет не менее двух; и
при определении, что определенное число раз имеет пороговое значение, создание предупреждающего сигнала, указывающего, что входные ворота не закрыты.
18. Способ сортировки объектов по п. 15, дополнительно предусматривающий:
определение, что объект находится внутри сортировочного весового оборудования в течение заданного периода времени; и в ответ
использование механизма или создание сигнала, стимулирующего прохождение объекта через выходные ворота.
19. Способ сортировки объектов по п. 15, дополнительно предусматривающий:
определение, что объект находится внутри сортировочного весового оборудования в течение заданного периода времени; и в ответ
открывание входных ворот, в то время как выходные ворота открыты, для облегчения прохождения объекта через выходные ворота, позволяя другому объекту зайти на сортировочное весовое оборудование через входные ворота.
20. Способ сортировки объектов по п. 15, дополнительно предусматривающий
поворот сортировочных ворот для облегчения прохождения объекта через проход и достижения одних из множества ворот.
| CN 108782311 A, 13.11.2018 | |||
| US 4138968 A1, 13.02.1979 | |||
| Система автоматической сортировки животных по результатам взвешивания и идентификации номера с использованием селекционных ворот для выделения в ветеринарный бокс | 2016 |
|
RU2637768C2 |
| US 20180092331 A1, 05.04.2018 | |||
| KR 101916803 B1, 08.11.2018 | |||
| CN 0108935185 A, 07.12.2018 | |||
| WO 2017217870 A1, 21.12.2017 | |||
| WO 2017034776 A1, 02.03.2017. | |||

