Изобретение относится к способу оценки выбросов парниковых газов у жвачного животного в условиях бесстойлового содержания и за предварительно заданный период времени от T0 до T заданного, и к устройству оценки выбросов парниковых газов для оценки выбросов парниковых газов у жвачного животного согласно указанному способу.
Повышенные выбросы парниковых газов (GHG) считаются причиной повышенного парникового эффекта. Есть основания полагать, что выбросы у молочного скота составляют большую часть повышенных выбросов парниковых газов, не только за счет навоза, но также, и как полагают в основном, за счет отрыжки метана. Вследствие этого, важно знать выброс подобных парниковых газов у молочного скота. Знание выбросов является необходимым первым этапом регулирования и снижения подобных выбросов.
В данной области было проведено множество исследований, чтобы попытаться определить выброс парниковых газов отдельных молочных животных в регулируемых окружающих условиях, например, в полностью герметичных камерах, в которых можно измерять и анализировать полный выброс у животного. Однако, в нормальных условиях молочного хозяйства полезные модели являются недостаточными и в основном косвенными, например, посредством жирнокислотных профилей молока.
Цель представленного изобретения состоит в том, чтобы предоставить полезную модель для определения выбросов парниковых газов молочных животных в их нормальных окружающих условиях, в частности в условиях бесстойлового содержания.
Изобретение предоставляет решение для данной цели с помощью способа по п. 1, который отличается тем, что способ включает: определение смоделированной функции нормы выбросов EM(t) для жвачного животного, определение моментов поедания корма жвачным животным, по меньшей мере в течение предварительно заданного периода времени, в виде последовательностей точек во времени {T1, T2, T3, Tn}, построение предполагаемой реальной функции нормы выбросов ER(t) на основании смоделированной функции нормы выбросов и моментов поедания корма, и интегрирование ER(t) от T0 до T заданного. Таким образом, различные моменты кормления принимают в расчет с точки зрения их влияния на выброс. Идея изобретения состоит в использовании «перезагрузки» каждый раз, когда животное ест, и в определении итога как суммы последовательных серий подобных перезагрузок. Работа авторов изобретения показывает, что с помощью подобной модели может быть получена подходящая аппроксимация суммарного выброса. Авторы изобретения обнаружили, что каждый момент кормления запускает новый «цикл» выбросов парниковых газов, который влияет на суммарные выбросы в определенный период времени. Например, в случае, когда имеется больше моментов кормления в данный период времени, также очень вероятно, что имеется увеличенный выход парникового газа, и наоборот.
Следует заметить, что должна быть принята смоделированная функция нормы выбросов, которая имеет пиковое значение через некоторое время после момента кормления. Это отражает тот факт, что когда поедается новый корм, пищеварению, которое должно производить парниковый газ, для этого потребуется некоторое время. Оно будет идти к пику, после которого постепенно уменьшающееся количество корма, которое все-таки должно быть переварено и будет вызывать уменьшение выбрасываемого парникового газа.
В зависимых пунктах формулы изобретения упоминаются предпочтительные или другие специальные варианты осуществления.
В вариантах осуществления, функция ER(t) построена в виде ER(t)=EM(t-T1-C1) для T1≤t<T2, EM(t-T2-C2) для T2≤t<T3, …, EM(t-Tn-1) для Tn-1≤t<Tn и EM(t-Tn-Cn) для Tn≤t, где C1, C2, …, Cn являются константами. Таким образом, после каждого момента кормления, строится аналогичная форма кривой выброса, так как сам механизм выброса, обусловленный конкретным животным, не изменяется. Также можно сказать, что между каждым набором последовательных моментов кормления, устанавливается новая кривая выброса, но в каждом случае на основании одной и той же базовой формы кривой. Константы служат для адаптации частей кривой к конкретным обстоятельствам или аппроксимациям, как будет объяснено дополнительно ниже.
В отдельном варианте осуществления, все константы составляют ноль. В данной аппроксимации, каждая предшествующая кривая представляет собой просто срез в новый момент кормления, и в этот новый момент кормления кривая начинается заново от нулевого выброса. Это очень простая аппроксимация, и легко осуществляемая математически. Все-таки, однако, особенно поскольку на практике большинство кривых будут показывать пиковый выброс в ближайшее время после момента кормления, уже это является полезной аппроксимацией.
В других вариантах осуществления, все константы C1, …, Cn определяют таким образом, чтобы функция ER(t) являлась непрерывной функцией. Это верно в частности для моментов кормления, т.е. Для переходных точек. На практике, функцией выброса будет непрерывная функция, точно также как любая другая физическая величина. Вследствие этого, аппроксимация, которая будет принимать это в расчет, может являться лучшей аппроксимацией. В данном варианте осуществления, предшествующая часть кривой будет иметь определенное значение в определенное время после своего соответствующего начального момента кормления. В данном варианте осуществления, предполагается, что часть кривой для последующего интервала, т.е. После следующего момента кормления, будет начинаться при том же самом значении. Следует заметить, что все-таки предоставляется две возможности, одна перед пиковым значением и одна после пикового значения. Предполагается, что принимается значение перед пиком, приводящее к соответствующему значению для соответствующих констант C1, C2, …
Указанное выше показывает только количество возможных вариантов осуществления общей идеи изобретения. Другие могут просто добавлять новую кривую к существующей. Другими словами, все кривые выбросов, начинающиеся перед новым моментом кормления, имеют возможность продолжаться бесконечно, несмотря на то, что значение для новой кривой, начинающейся в новый момент кормления, добавляется для каждого времени после этого нового момента кормления. Вследствие этого, в дополнительном варианте осуществления, функция ER(t) построена в виде
для всех моментов кормления T1, …, Tn, релевантных для требуемого периода времени T0-T заданное. Следует заметить, что это охватывает случай, когда даже T1 находится после T0, оставляя первую часть времени от T0 до T1, открытой для некоторой неопределенности. Это также охватывает случай одного или более моментов кормления T1, T2, …, перед T0. Релевантная временная рамка, которая должна приниматься в расчет перед T0, зависит от того, как быстро функция EM(t) падает до нуля. Если это период Tпадения, то предпочтительно все моменты кормления вплоть до Tпадения перед T0 также должны приниматься в расчет, как первые моменты кормления T1, T2,… Однако, если данное время является только небольшой частью суммарного периода времени T0-T заданное, его можно спокойно проигнорировать.
Следует заметить, что считается, что этап интегрирования охватывает все ее математические эквиваленты, среди прочего аппроксимацию суммирования количества точек времени, широту релевантных интервалов и так далее. Также следует заметить, что для наиболее точной оценки необходимо определить все моменты кормления. Однако, возможно пропустить один или более моментов, предусматривая менее точную аппроксимацию. Также, оценка между T0 и T1 для T0<T1, является невозможной и опускается. В этом случае, должна быть сделана некоторая (более общая) аппроксимация для первого интервала, или время и моменты кормления необходимо выбирать таким образом, чтобы данная ситуация не происходила. Следует заметить, что в представленной модели также возможно иметь более чем одно измерение выбросов парниковых газов между двумя моментами кормления. Тогда подобные очевидно дополнительные измерения служат, чтобы сделать модель более точной.
В отдельных вариантах осуществления, кормом является рацион, содержащий грубые корма, такие как трава, сено, силос, кукуруза, и необязательно содержащий концентраты. В данном случае считается, что концепция «рациона» включает в себя TMR или так называемую полнорационную смесь, а также PMR или частично рационную смесь. Все данные рационы содержат грубые корма, несмотря на то, что некоторые также содержат концентраты. У авторов изобретения есть основания полагать, что данные корма не «только из концентратов» обеспечивают основные выбросы парниковых газов. Корма только из концентратов, такие как дают, например, в доильных залах или залах, специализирующихся на кормлении концентратами, должны быть исключены. Есть основания полагать, что корма «только из концентратов» будут оказывать влияние на суммарные выбросы парниковых газов, но каков этот эффект еще не известно.
В объяснении изобретения выше, часть включает в себя определение смоделированной функции нормы выбросов для животного. В вариантах осуществления определение смоделированной функции нормы выбросов включает измерение нормы выбросов парниковых газов во множестве точек измерения во времени TM0, …, TMn, предоставляющее соответствующие значения EM0, …, EMn, устанавливающие для каждой из указанных точек измерения во времени TM0, …, TMn самый последний момент кормления TF0, …, TFn перед соответствующей точкой измерения во времени, и определение функции ER(t) посредством подбора математической кривой, которая соответствует наборам значений ((TM0-TF0), EM0), …, ((TMn-TFn), EMn). Сама по себе, математическая методика подбора кривой по различным точкам хорошо известна. Однако, согласно представленному изобретению, понятно, что все измеренные точки могут быть связаны с единственной кривой, функцией нормы выбросов (смоделированной). Как указано выше, это основано на идее, что по меньшей мере в среднем, выброс парникового газа для молочного животного всегда будет показывать одно и то же поведение после кормления. Вследствие этого, неважно, когда выброс парниковых газов (норму) измеряют, при условии, что его измеряют. В качестве ремарки, которую необходимо здесь сделать, авторы изобретения полагают, что фактическое количество употребленного корма может иметь влияние на выработку парникового газа. Однако, по имеющимся у авторов изобретения сведениям, не известно ясное описание какой-либо математической связи между количеством корма и выбросами парниковых газов.
В важном дальнейшем развитии изобретения, способ дополнительно включает повторение этапов - измерения в дополнительной точке во времени Tadd указанной нормы выбросов парниковых газов EMadd, и - повторного определения функции посредством приспосабливания и повторного подбора математической кривой по одному из последних X наборов значений TM и EM, где X представляет собой предварительно заданное число, и все наборы значений TM и EM. Первый случай представляет собой что-то вроде функции нормы скользящего среднего выбросов тогда, как последнее представляет собой функцию более общего среднего. С данным вариантом осуществления, возможно обновлять функцию нормы выбросов до новых значений. Это не только делает возможным повышенную точность, но также делает возможной динамическую адаптацию функции/кривой к изменениям в животном, таким которые могут следовать из развития организма животного, например, цикла созревания или лактации, или изменения рациона, сезонных изменений и так далее.
В отдельном варианте осуществления, на этапе повторного определения функции, применяют одно или более предварительно заданных ограничений, содержащих предварительно заданные правила в связи с относительным и/или абсолютным изменением одного или более коэффициентов, использованных в функции. В данном варианте осуществления, принимают меры, чтобы функция, т.е. смоделированная функция нормы выбросов EM(t), не изменялась слишком широко. Конкретным подходом для применения подобных ограничений является так-называемый метод DLM, или динамическое линейное моделирование. Например, делается ссылка на EP 2154952, относящийся к модели DLM для кормления молочных животных. Более конкретно, данный пример основан на Байесовских правилах адаптации модели. Подобные Байесовские правила также предпочтительно можно применять в качестве ограничений, подлежащих применению в модели представленного изобретения.
В представленном изобретении, производится применение стандартной кривой для выброса EM(t) для каждого животного. Это является первой аппроксимацией. В отдельной дополнительной разработке, способ уточняется в том, что из набора стандартных кривых выбирают математическую кривую в зависимости от типа или породы животного, и при этом подбор включает умножение кривой на константу. Это обеспечивает следующее преимущество. Несмотря на то, что предполагается, что базовая форма функции выброса EM(t) в основе является одинаковой для всех животных по меньшей мере определенного типа или породы, в пределах подобного типа или породы животных могут быть колебания. Например, в пределах породы Holstein-Friesian, может быть маленькое или чрезвычайно большое животное. Это может быть просто результатом возраста, или генетической изменчивости окончательных размеров. Тем не менее, данный вариант осуществления допускает, что базовая кривая тогда может быть масштабирована вверх или вниз на константу. Данная константа должна определяться из ряда измерений. Например, первые 3-10 измерений используют для определения константы (коэффициента) для масштабирования стандартной кривой для коров Holstein-Friesian, выбранной из набора стандартных кривых. Это может быть проделано посредством подбора таких измерений для стандартной кривой, причем коэффициентом масштабирования является переменная для подбора. Полученный в результате коэффициент подбора, прикладываемый к стандартной кривой, тогда дает «адаптированную стандартную кривую» для данного конкретного животного, которая приведет к большей точности. Конечно, не исключены другие методы подбора для стандартной кривой, например, более короткое или более длинное запаздывание по времени между моментом кормления и пиком кривой выброса.
Одним из этапов в способе является определение моментов поедания корма. В вариантах осуществления, определение моментов поедания корма включает определение моментов, когда выполняется по меньшей мере одно из следующих условий: жвачному животному предоставлен новый рацион, исключающий корм только из концентратов; корм перемещается в сторону ограждения корма, в котором жвачное животное имеет возможность получать корм; жвачному животному предоставляется доступ к пастбищу. В данном случае, сделали выбор, что моментами кормления являются начальные моменты. Также можно обсуждать, что моментами кормления должно быть среднее периода времени, во время которого выполняется условие, или предварительно заданное время после первого момента, когда выполняется условие. Несмотря на то, что авторы изобретения остановили выбор на первом моменте, это сделано больше из практических соображений, чем по другим конкретным причинам. Потому что выбросы парниковых газов не начинают увеличиваться в самый момент начала еды, так как они по меньшей мере требуют пищеварения в нижнем отделе желудочно-кишечного тракта. Вследствие этого, следует заметить, что вышеупомянутые альтернативные моменты также должны рассматриваться в пределах объема правовых притязаний представленного изобретения.
В отдельных вариантах осуществления определение моментов кормления включает идентификацию жвачного животного в месте кормления и определение, что указанное жвачное животное принимает корм, посредством датчика кормления. В некоторых проектах коровников, имеются конкретные отдельные откормочные площадки для скармливания рациона. Так как они обеспечивают индивидуально адаптированные рационы для животных, они идеально подходят для предоставления конкретной информации на моменты кормления. Между прочим, подобные отдельные откормочные площадки также являются идеальными для определения выброса парниковых газов, поскольку отсутствуют помехи от других животных. Следует заметить, что выброс считается обусловленным предшествующим кормлением. Все это будет объяснено дополнительно ниже.
В некоторых вариантах осуществления датчик кормления содержит камеру с программным обеспечением для обработки изображений для распознавания кормового поведения, датчик массы корма, выполненный с возможностью определения изменения массы устройства кормления, и/или микрофон с программным обеспечением для обработки звуков для распознавания кормового поведения. Они обеспечивают полезные методы определения, когда животное ест. Например, если программное обеспечение для обработки изображений устанавливает, что животное повторно тянется ртом к месту нахождения корма, можно с уверенностью предположить, что оно принимает корм. Если, широко известный, датчик массы корма устанавливает изменение массы корма, животное должно было есть. Что касается микрофона с программным обеспечением для обработки звуков, делается ссылка на EP 1301068, который раскрывает датчик, способный устанавливать различие между пережевыванием жвачки и кормлением. Тем самым, могут быть установлены действия кормления.
В вариантах осуществления определение моментов кормления включает определение, когда жвачное животное создает звуки кормления, посредством звукового датчика, в частности предоставленного на или около шеи и/или рта, который выполнен с возможностью обнаружения звуков, создаваемых жвачным животным, когда оно двигает ртом в частности для пережевывания. Это несколько более конкретный вариант осуществления, который упоминался ранее. И снова, для более подробной информации делается ссылка на EP 1301068. Также, как уже упоминалось выше, при определении моментов кормления, должны быть исключены звуки пережевывания жвачки, так как нет оснований полагать, что они имеют большое влияние на выбросы парниковых газов.
В частности, есть возможность включить выявление, стоит или лежит жвачное животное, и пренебрегать моментами/периодами со звуками, создаваемыми во время лежания, более конкретно выявление, опущена ли на землю голова жвачного животного и пренебрегать моментами/периодами со звуками, создаваемыми в то время, когда голова не опускается в течение по меньшей мере предварительно заданного времени. Все это служит для выбора моментов фактического кормления, и не включает другие виды деятельности. В данном случае, предполагается, что относительно редко, когда животное пережевывает жвачку, оставаясь стоять, а для дальнейшего исключения данной ситуации, которая не исключается, предполагается, что комбинацией вставания, пережевывания жвачки и головы в направлении земли надо реально пренебрегать. Другими словами, если животное создает звуки кормления, оставаясь стоять и с головой вниз, это определенно считается кормлением.
В других вариантах осуществления способ включает, что при определении моментов кормления, выявляются только звуки пережевывания жвачки, а моменты кормления определяют, как моменты локального минимума в звуках пережевывания жвачки. И снова, для определения периодов, когда животное пережевывает жвачку, может использоваться датчик пережевывания жвачки, который раскрыт, например, в EP 1301068. Была обнаружена хорошая аппроксимация моментов кормления для принятия времени минимальной активности пережевывания жвачки, между периодами пережевывания жвачки. Данный вариант осуществления не применим в системах бесстойлового содержания, но также в частности в системах, где коровы пасутся на пастбищах по меньшей мере в течение части дня, но также в течение более длительных периодов перед возвратом в помещение. На пастбищах, более трудно определять точные моменты кормления. Однако, за счет использования датчика пережевывания жвачки, все-таки возможно определять моменты с помощью только что описанного способа. Следует заметить, что подобные данные о пережевывании жвачки могут посылаться в центральный компьютер, с помощью Bluetooth(tm) или других передающих устройств. В предпочтительных вариантах осуществления, способ включает:
- предоставление стада, имеющего множество жвачных животных,
- предоставление одного или более устройств идентификации жвачных животных, по меньшей мере в одном или более положениях для кормления жвачных животных и в одном или более положениях для измерения нормы выбросов парниковых газов и выполненных с возможностью идентификации жвачного животного и предоставления сигнала идентификации,
- выполнение способа для каждого из жвачных животных в стаде и
- предоставление суммарного выброса парниковых газов за предварительно заданный период времени в виде суммы выбросов парниковых газов у каждого из жвачных животных.
С помощью данного варианта осуществления, выбросы парниковых газов можно определять для всего стада вместо того, чтобы определять только для одного животного. Понятно, что для построения отдельной кривой ER(t) для каждого животного возможно принимать одну и ту же стандартную кривую EM(t), но конечно также возможно, и более точно, использовать индивидуализированные кривые, как дополнительно описано выше. За счет узнавания таким образом суммарных выбросов парниковых газов стада, можно изучать возможные результаты рациона или что-либо еще. Данную информацию можно использовать, чтобы увидеть, можно ли уменьшить суммарные выбросы парниковых газов.
В представленном способе, животным может быть любое жвачное животное, такое как буйволы, козы и так далее. Однако конкретно жвачным животным является корова. Кроме того, парниковым газом может быть любой газ, испускаемый животным, который влияет на усиленный парниковый эффект, например, диоксид углерода и метан. В частности, однако, парниковым газом в представленном способе является метан, так как он представляет собой не только газ со значительно большим относительным влиянием на усиленный парниковый эффект, с потенциалом глобального потепления в 25 раз, как у диоксида углерода, в течение периода, составляющего 100 лет, но кроме того он более жестко связан с пищеварением, тем самым предоставляя о нем более прямую информацию. Наоборот, диоксид углерода также, а может быть преимущественно, связан с сжиганием калорий организма. Соответственно любая информации от диоксида углерода, относящаяся к пищеварению, должна быть отфильтрована, что не является легким этапом.
Изобретение также относится к устройству оценки выбросов парниковых газов для оценки выбросов парниковых газов у жвачных животных, согласно способу по любому из предшествующих пунктов, при этом устройство содержит:
- по меньшей мере один датчик нормы выброса парниковых газов, выполненный с возможностью предоставления сигнала нормы выбросов парниковых газов,
- часовое устройство, выполненное с возможностью предоставления сигнала времени каждый раз, когда указанное жвачное животное ест, и каждый раз, когда по меньшей мере один датчик нормы выброса парниковых газов измеряет сигнал нормы выбросов парниковых газов,
- блок управления, выполненный с возможностью применения способа по любому предшествующему пункту, и на основании измеренных сигналов времени и сигналов нормы выбросов парниковых газов. Данное устройство применяет способ представленного изобретения с принципиальным преимуществом подачи полезной информации по (суммарному) выбросу парникового газа простым способом.
В вариантах осуществления каждый датчик нормы выброса парниковых газов содержит или предоставлен вместе с устройством идентификации жвачного животного, выполненным с возможностью установления идентификационной метки жвачного животного при проверке датчика. Это полезно для сопоставления измеренного выброса с конкретным животным, особенно в условиях, где имеется больше животных.
Предпочтительно, устройство содержит блок кормления со станцией идентификации животного, выполненной с возможностью идентификации жвачного животного при кормлении, при этом блок управления выполнен с возможностью обработки соответствующего сигнала времени вместе с идентификацией животного. В данном случае, станция идентификации идентифицирует животное и сопоставляет сигнал времени, т.е. сигнал момента кормления, с идентификационной меткой. Следует заметить, что аналогичный сигнал может быть получен иным образом, например, с помощью ограждения корма со станцией идентификации, или с ограждением корма с толкателем корма, имеющим управление с часами. В данном случае, когда толкатель корма толкает корм в направлении ограждения корма, в соответствии, например, с запрограммированным маршрутом, выглядит, что животные начинают кормление заново. Соответственно, считается, что момент кормления наступает, когда толкатель корма толкает корм.
В вариантах осуществления предоставлен датчик выбросов парниковых газов со станцией идентификации животного в одном или более мест доения, в месте кормления, например, в боксе кормления или в ограждении кормушки, и/или в месте отдыха. Для представленного изобретения необходимо, чтобы был по меньшей мере один датчик парникового газа. Предпочтительно, подобный датчик располагают способом, в котором животное более или менее отделено от других. Таким образом, выбросы у других животных не будут, или будут в допустимой степени, мешать выбросу, подлежащему измерению. Предпочтительно, доильный бокс и/или бокс кормления содержат подобный датчик выброса парниковых газов. Может быть предпочтительным наличие множества датчиков, распределенных по всему помещению, так как это может обеспечить больший набор измерений в течение релевантного периода времени.
Дополнительные аспекты, варианты осуществления и преимущества изобретения будут очевидны из подробного описания ниже конкретных вариантов осуществления и их чертежей, на которых:
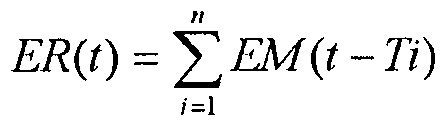
Фиг. 1 представляет собой очень схематичный чертеж, не совсем в перспективе, системы бесстойлового содержания согласно изобретению;
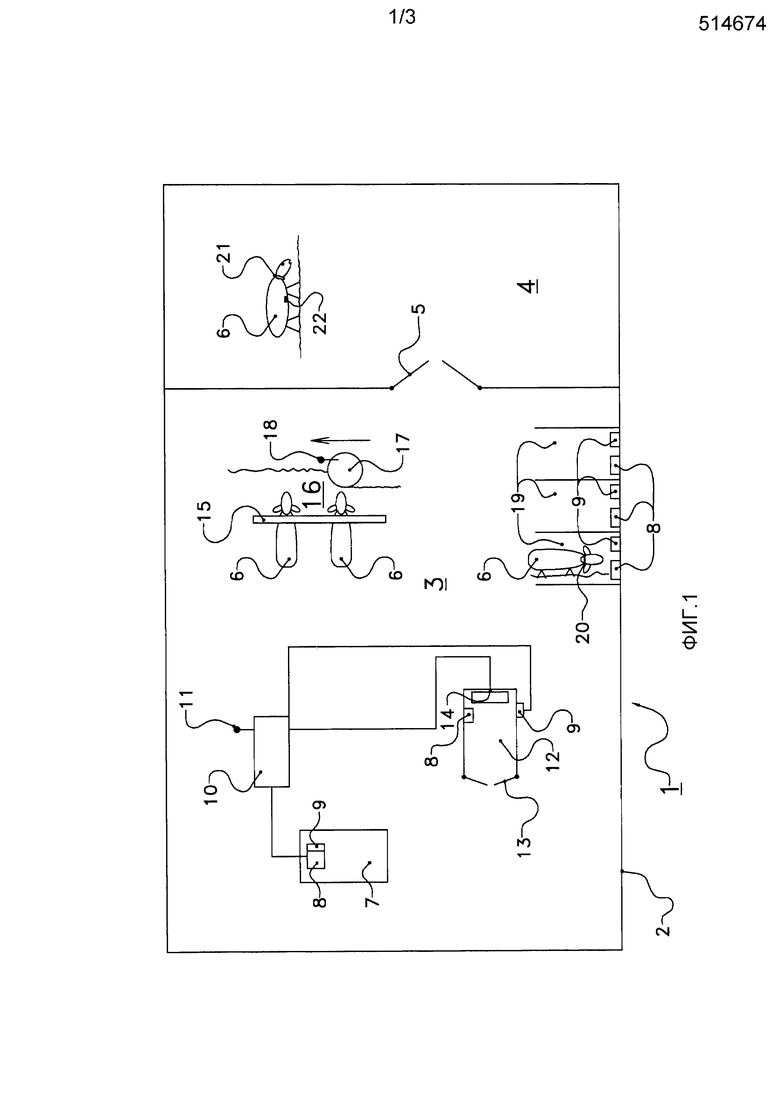
Фиг. 2 представляет собой график для определения базовой функции EM(t) на основании измерений;
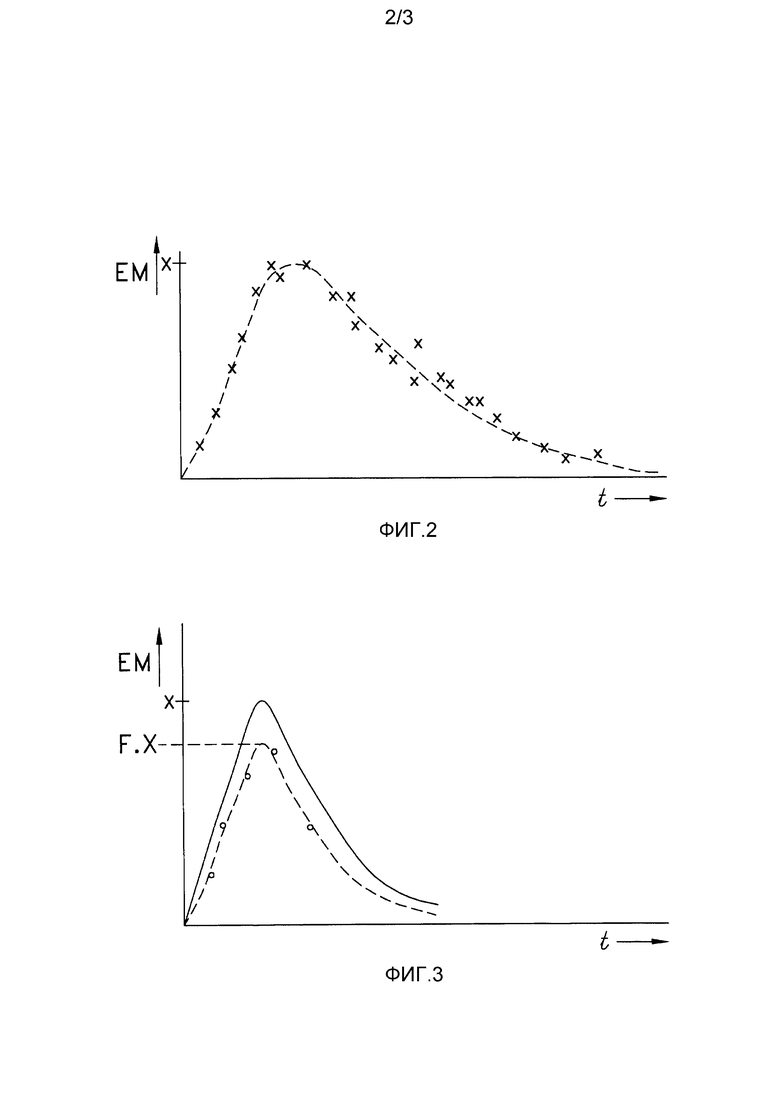
Фиг. 3 представляет собой график для определения индивидуальной функции EM(t) для конкретного животного, снова на основании измерений; а
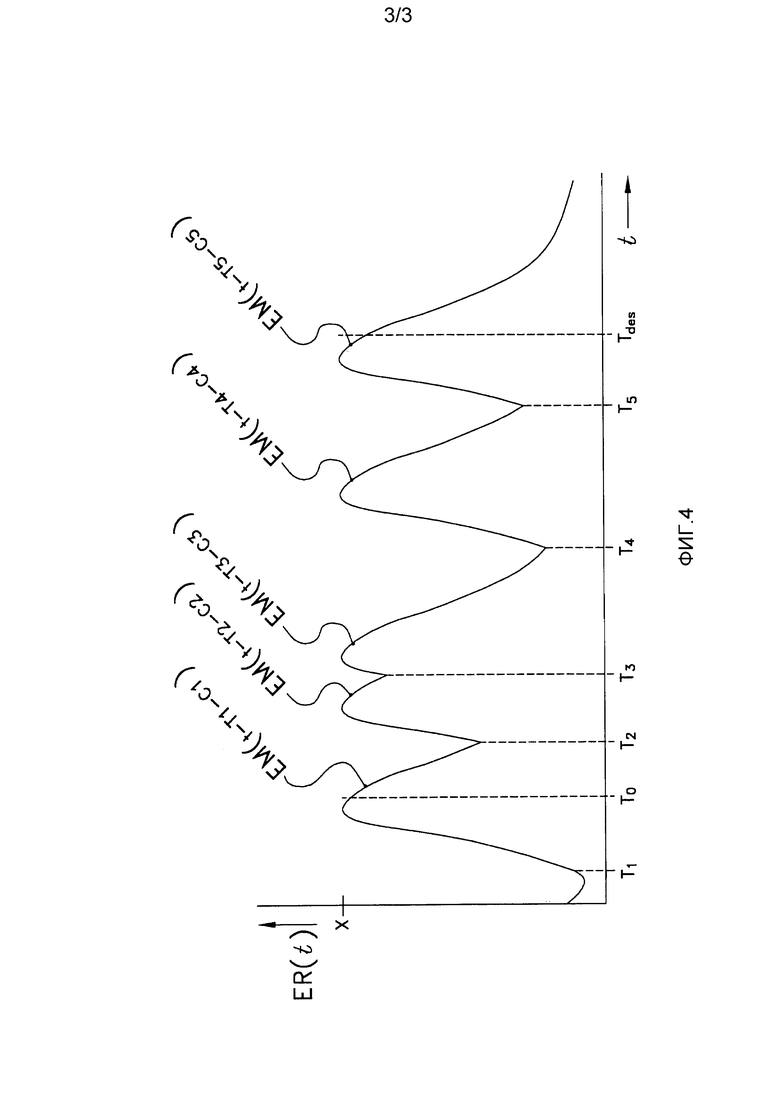
Фиг. 4 представляет собой график, показывающий построенную функцию ER(t), согласно изобретению.
Фиг. 1 представляет собой очень схематичный чертеж системы 1 с помещением 2 с хлевом 3 и необязательным пастбищем 4 с воротами 5 между ними. Коровы обозначены 6. Ссылочный номер 7 показывает доильный робот с датчиком 8 газа и устройством 9 идентификации, причем все связано с компьютером 10, содержащим, как показано в данном случае, приемопередатчик 11. Показан бокс 12 кормления с воротами 13, кормушкой 14, а также датчиком 8 газа и устройством 9 идентификации.
Ограждение корма обозначено 15, с кормом 16, толкаемым толкателем 17 корма, также имеющим приемопередатчик 18. Стойла обозначены 19, в одном из них корова с идентификационной меткой 20. На пастбище, пасется корова, носящая датчик 21 пережевывания жвачки и датчик 22 высоты.
В помещении важной частью является доильный робот 7. Здесь, животных доят и необязательно кормят концентратами. При проверке доильного робота, животных идентифицирует устройство 9 идентификации. Кроме того, доильный робот содержит датчик 8 парникового газа, в частности датчик метана, выполненный с возможностью измерения выброса (парникового) газа у животного в доильном роботе 7. Для примеров подобных газовых датчиков, которые известны сами по себе, делается ссылка, например, на документ US 2011/0192213, в частности, например, на параграф 0018. Также, как описано в данном документе, возможно отслеживать соотношение диоксида углерода и метана для того, чтобы получать показание абсолютного выброса метана. Следует заметить, что в качестве преимущества рассматривается, когда для определения выброса парниковых газов не используются никакие болюсы, например, болюсы, использующие медленное высвобождение SF6 в качестве индикаторного газа. Отсутствие болюсов означает более естественное поведение.
Аналогично важную роль может играть бокс 12 кормления. Он может аналогичным образом содержать систему идентификации животного, а также датчик 8 газа, который описан выше. В боксе 12 кормления, животным при посещении и идентификации устройством 9 идентификации могут быть предоставлены грубые корма. Это служит не только для предложения наилучшего рациона, доступного для животного, но также обеспечивает, чтобы момент кормления регистрировался с высокой точностью. Это может достигаться, например, посредством датчика массы (не показано) для кормушки, который регистрирует моменты кормления, когда масса корма уменьшается. Одновременно, выбросы парниковых газов измеряются датчиком 8 и объединяются с сигналом времени.
Следует заметить, что компьютер 10, а также каждое устройство 9 идентификации, будет иметь часовое устройство для регистрации моментов времени.
Информации как от доильного робота 7, так и из бокса 12 кормления посылается в центральный компьютер 10, где она обрабатывается согласно изобретению, что будет объяснено в связи с Фиг. 2-4.
В дополнение, предоставлены стойла 19 для того, чтобы коровы 6 лежали и пережевывали жвачку. В данном случае в стойле 19 показана только одна корова 6. Корова носит идентификационную метку 20, по которой ее идентифицирует устройство 9 идентификации. Локальный датчик 8 газа снова служит для определения выброса парниковых газов у данной коровы. Здесь следует отметить, что предоставление такого множества газовых датчиков 8 является только опцией, как можно было бы сделать в принципе.
Ограждение 15 корма, показанное на Фиг. 1, служит для того, чтобы коровы 6 в конкретном рационе получали корм 16, такой как сено и тому подобное. Можно добавлять некоторые концентраты. Также показан толкатель 17 корма, такой как Lely Juno(tm), который выполнен с возможностью подталкивания корма 16 в направлении ограждения 15 корма, т.е. в направлении коров 6. Следует отметить на практике, что толкание корма 16 является побуждением для коров подойти к ограждению 15 и поесть. Вследствие этого, если толкатель 17 толкает корм, для всех практических целей это считается моментом кормления. Толкатель корма, запрограммированный следовать по определенным маршрутам и в течение нескольких раз в день, будет посылать часовой сигнал или сигнал времени в центральный компьютер 10 посредством своих соответствующих приемопередатчиков 18 и 11, например, по связи Bluetooth(tm) и тому подобное. Центральный компьютер будет обрабатывать данный сигнал от толкателя корма, как момент кормления.
Также показано пастбище 4, с воротами 5. Если данные ворота являются автоматическими, их открывание, соединенное с сигналом времени, может считаться моментом кормления, так как предоставление коровам свежей травы, для всех практических целей может считаться началом поедания указанной травы. В качестве альтернативы или дополнительно, коровы могут быть снабжены датчиком 21 пережевывания жвачки. Если данный датчик 21 выполнен с возможностью различения звуков кормления и звуков пережевывания жвачки, как раскрыто в EP 1301068, то отправка сигнала всякий раз удовлетворяет моменту кормления. Однако, даже в случаях, когда выявляются только звуки пережевывания жвачки, момент кормления может подразумеваться, в частности центральным компьютером, в который могут посылаться сигналы, например, с помощью Bluetooth(tm). Потому что компьютер может делать вывод о периодах времени, когда имеется минимальная активность пережевывания жвачки, между периодами с высокой активностью пережевывания жвачки. На практике, моменты минимальной активности пережевывания жвачки можно принимать, как моменты кормления. Они также сохраняются компьютером 10. Кроме того, также показан датчик 22 высоты, выполненный с возможностью определения, стоит ли корова 6. В комбинации с датчиком 21 пережевывания жвачки, можно легко различать между кормлением и пережевыванием жвачки, так как корова вряд ли будет пережевывать жвачку, когда стоит, в частности, если датчик 22 высоты и/или датчик 21 пережевывания жвачки дополнительно способны сообщать, направлена ли голова коровы в сторону земли.
Таким образом, общая система 1 может определять моменты, когда животное ест, либо в кормушке 14 для грубых кормов, либо в ограждении 15 корма, и даже на пастбище 4. Кроме того, она устанавливает выбросы парниковых газов животного (с идентифицируемым контролем) в различные моменты в доильном роботе 7 и/или в боксе 12 кормления и/или в стойлах 19.
С помощью приведенных выше данных, система определяет точечный график выбросов парниковых газов в зависимости от времени после момента кормления, на Фиг. 2. Следует заметить, что данная фигура относится либо к данным для одного животного, либо (менее предпочтительно) для одного типа животного. Далее, на основании выбранной смоделированной базовой функции, по данным строится математическая кривая (пунктирная линия). В качестве смоделированной базовой функции, можно принять, например, EM(t)=P(t)exp(-t), где P(t) представляет собой полиноминальную функцию необходимого порядка, например, первого или второго порядка. Конкретным примером таким образом было бы EM(t)=4t^2exp(-t). В любом случае, это должна быть функция, начинающаяся на нуле, имеющая максимум, а затем медленно падающая снова до нуля, для отображения естественного хода нормальных выбросов парниковых газов.
На необязательном этапе, относящемся к Фиг. 3, данная базовая функция EM(t), которая справедлива, например, для определенной породы коров, такой как Jersey или Holstein, может быть оптимизирована для отдельного животного. Допустим, что для среднего животного данного типа была установлена общая функция EM(t). Она показана на Фиг. 3 в виде сплошной линии, с пиком на значении X (относительные единицы). Теперь, для конкретного животного, был установлен ряд значений выброса, показанных в виде пяти кружков. Затем, подбирается кривая, которая имеет такую же форму, но умножена на фиксированную константу F. Эта индивидуализированная кривая показана в виде сплошной линии, которая соответственно имеет пик на значении FX. Конечно, возможно использовать различные методики подбора для установки отдельной кривой, но эта подходит хорошо. Следует заметить, что показано, что F имеет значение меньше, чем 1. Для других животных оно конечно может также быть больше чем 1.
Затем, на Фиг. 4, данная функция EM(t), необязательно индивидуализированная, строится для различных интервалов времени, каждый из которых начинается и заканчивается последующими моментами кормления, таким образом, чтобы получалась непрерывная математическая функция ER(t). Вдобавок, от первого момента кормления T1, произвольно запускается от нуля или нулевого измерения, и функция EM(t) строится от t=T1. Она прекращается при t=T2. В это время T2, функция для первого интервала будет иметь определенное значение V1. Далее, строится еще одна функция (снова) EM(t), теперь от времени T=12 и начинается при значении V1. Вдобавок, функция EM(t-12) была смещена на константу C2 для отображения начала при ненулевом значении. Она сходит к константе, упомянутой в пункте 4. Данная следующая функция обрезается в T3, где вся процедура повторяется и так далее, до тех пор, пока не будет достигнута точка во времени «T заданное». Полученная в результате функция ER(t) теперь может быть интегрирована на требуемый период TO - Tзаданное. Очевидно, это часто будет 24-часовой период, но это может быть любой требуемый период при условии, что вероятно, что достаточно точек данных может быть собрано во времени.
Следует заметить, что для способа построения ER(t) следует, что всегда имеется одно и то же максимальное значение X. Данное немного неестественное поведение не представлено в адаптированных способах построения, также согласно изобретению. Например, имеется возможность не прерывать функцию EM(t-T1) после T2, но обеспечить ее продолжение, и просто добавить поверх нее еще одну функцию (EM(t-T2) от T2 и так далее. Тогда пики будут выше, вплоть до максимума, когда первая функция EM(t-T1) адекватно падает до нуля. Кроме того, изобретение также охватывает динамическое (повторное) определение EM(t), когда добавляются новые данные. Это также может обеспечить, что согласно способу, описанному для Фиг. 3, пиковая высота может быть адаптирована к этим новым данным, обеспечивая большую точность.
Группа изобретений относится к способу оценки выбросов парниковых газов у жвачного животного в условиях бесстойлового содержания, за предварительно заданный период времени, и устройству оценки выбросов газов. Способ включает определение смоделированной функции нормы выбросов газов EM(t) для жвачного животного, определение моментов поедания корма жвачным животным, построение предполагаемой реальной функции нормы выбросов ER(t) на основании смоделированной функции нормы выбросов и моментов поедания корма, интегрирование ER(t) от T0 до T заданного. Также предложено устройство оценки выбросов парниковых газов, выполненное с возможностью выполнения данного способа. Группа изобретений позволяет отрегулировать расчеты для установления выбросов парниковых газов у животных, при знании моментов кормления животного. 2 н. и 20 з.п. ф-лы, 4 ил.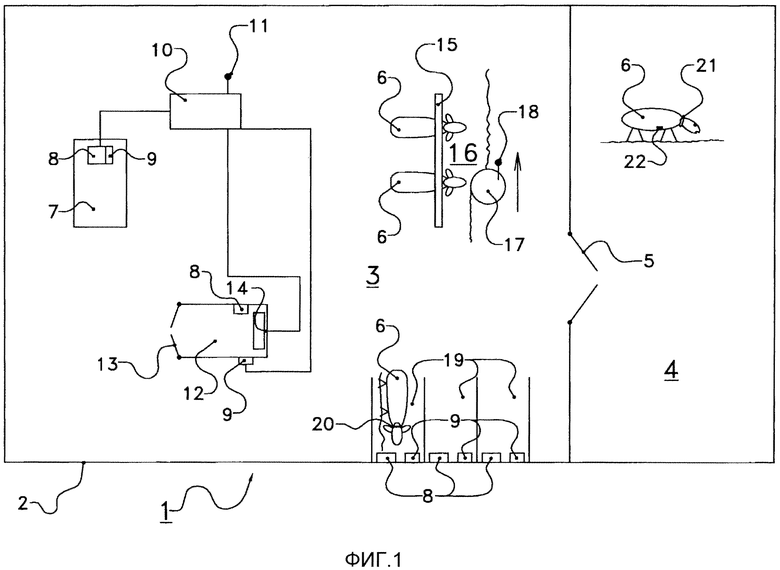
1. Способ оценки выбросов парниковых газов у жвачного животного в условиях бесстойлового содержания, и за предварительно заданный период времени от Т0 до Т заданного, при этом способ содержит:
- вывод часовым устройством сигнала времени каждый раз, когда жвачное животное ест;
- определение в блоке управления смоделированной функции нормы выбросов EM(t) для жвачного животного;
- определение блоком управления на основе сигналов времени, выведенных часовым устройством, моментов поедания корма жвачным животным, по меньшей мере, в течение предварительно заданного периода времени, в виде последовательностей точек во времени {T1, Т2, Т3, …, Tn};
- построение блоком управления предполагаемой реальной функции нормы выбросов ER(t) на основании смоделированной функции нормы выбросов и моментов поедания корма; и
- интегрирование блоком управления ER(t) от Т0 до Т заданного.
2. Способ по п. 1, в котором функция ER(t) построена в виде ER(t)=ЕМ(t-T1-C1) для T1≤t<T2, EM(t-T2-C2) для T2≤t<T3, …, ЕМ(t-Tn-1-Cn-1) для Tn-1≤t<Tn, и ЕМ(t-Tn-Cn) для Tn≤t, где C1, С2, …, Cn являются константами.
3. Способ по п. 2, в котором все константы равны нулю.
4. Способ по п. 2, в котором все константы С1, …, Cn определяют таким образом, что функция ER(t) является непрерывной функцией.
5. Способ по п. 1, в котором функция ER(t) построена в виде
для всех моментов кормления Т1, …, Tn, релевантных для требуемого периода времени Т0-Т заданное.
6. Способ по п. 1, в котором кормом является рацион (16), содержащий грубые корма.
7. Способ по п. 6, в котором корм дополнительно содержит концентраты.
8. Способ по п. 1, в котором определение смоделированной функции нормы выбросов содержит:
- измерение нормы выбросов парниковых газов во множестве точек измерения во времени ТМ0, …, TMn, предоставляя соответствующие значения ЕМ0, …, EMn;
- установление для каждой из указанных точек измерения во времени ТМ0, …, TMn самого последнего момента кормления TF0, …, TFn перед соответствующей точкой измерения во времени; и
- определение функции ER(t) посредством подбора математической кривой, которая соответствует наборам значений ((TM0-TF0), ЕМ0), …, ((TMn-TFn), EMn).
9. Способ по п. 8, дополнительно содержащий повторение этапов
- измерения в дополнительной точке во времени Tadd указанной нормы выбросов парниковых газов EMadd, и
- повторного определения функции посредством адаптирования и повторного подбора математической кривой через один из последних X наборов значений ТМ и ЕМ, где X представляет собой предварительно заданное число, и все наборы значений ТМ и ЕМ.
10. Способ по п. 9, в котором на этапе повторного определения функции, применяют одно или более предварительно заданных ограничений, содержащих предварительно заданные правила по отношению к относительному или абсолютному изменению одного или более коэффициентов, использованных в функции.
11. Способ по п. 7, в котором математическую кривую выбирают из набора стандартных кривых в зависимости от типа или породы животного и в котором подбор содержит умножение кривой на константу (F).
12. Способ по п. 1, в котором определение моментов поедания корма содержит определение моментов, когда выполняется по меньшей мере одно из следующих условий:
- жвачному животному предоставлен новый рацион;
- корм перемещается в направлении ограждения корма, при этом жвачное животное имеет возможность получать корм;
- жвачному животному предоставлен доступ на пастбище.
13. Способ по п. 1, в котором определение моментов кормления содержит идентификацию жвачного животного в месте кормления и определение, что указанное жвачное животное ест, посредством датчика кормления.
14. Способ по п. 13, в котором датчик кормления содержит камеру с программным обеспечением для обработки изображений для распознавания кормового поведения, датчик массы корма, выполненный с возможностью определения изменения массы устройства кормления или микрофон с программным обеспечением для обработки звуков для распознавания кормового поведения.
15. Способ по п. 1, в котором определение моментов кормления содержит определение, когда жвачное животное создает звуки кормления посредством звукового датчика, который выполнен с возможностью обнаружения звуков, создаваемых жвачным животным при движении его рта, в частности при пережевывании.
16. Способ по п. 15, в котором при определении моментов кормления исключаются звуки пережевывания жвачки.
17. Способ по п. 15, в котором при определении моментов кормления выявляются только звуки пережевывания жвачки, и моменты кормления определяются как моменты локального минимума в звуках пережевывания жвачки.
18. Способ по п. 1, содержащий:
- предоставление стада, имеющего множество жвачных животных;
- предоставление одного или более устройств идентификации жвачных животных по меньшей мере в одном или более положениях для кормления жвачных животных и в одном или более положениях для измерения нормы выбросов парниковых газов и выполненных с возможностью идентификации жвачного животного и предоставления сигнала идентификации;
- выполнение способа для каждого из жвачных животных в стаде; и
- предоставление суммарных выбросов парниковых газов за предварительно заданный период времени в виде суммы выбросов парниковых газов у каждого из жвачных животных.
19. Устройство оценки выбросов парниковых газов для оценки выбросов парниковых газов у жвачного животного, при этом устройство содержит:
- по меньшей мере один датчик нормы выброса парниковых газов, выполненный с возможностью предоставления сигнала нормы выбросов парниковых газов;
- часовое устройство, выполненное с возможностью предоставления сигнала времени каждый раз, когда указанное жвачное животное ест, и каждый раз, когда по меньшей мере один датчик нормы выброса парниковых газов измеряет сигнал нормы выбросов парниковых газов;
- блок управления, выполненный с возможностью:
- определения смоделированной функции нормы выбросов EM(t) для жвачного животного;
- определения моментов поедания корма жвачным животным, по меньшей мере, в течение предварительно заданного периода времени, в виде последовательностей точек во времени {T1, Т2, Т3, …, Tn};
- построение предполагаемой реальной функции нормы выбросов ER(t) на основании смоделированной функции нормы выбросов и моментов поедания корма; и
- интегрирование ER(t) от Т0 до Т заданного.
20. Устройство по п. 19, в котором каждый датчик нормы выбросов парниковых газов содержит или предоставлен вместе с устройством идентификации жвачного животного, выполненным с возможностью установления идентификационной метки жвачного животного при проверке датчика.
21. Устройство по п. 19, содержащее блок кормления со станцией идентификации животного, выполненной с возможностью идентификации жвачного животного при кормлении, при этом блок управления выполнен с возможностью обработки соответствующего сигнала времени вместе с идентификационной меткой животного.
22. Устройство по п. 21, в котором датчик выбросов парниковых газов со станцией идентификации животного предоставлен в одном или более местах доения, в месте кормления или в месте отдыха.
| US 6868804 B1, 22.03.2005 | |||
| US 5265618 A1, 30.11.1993 | |||
| US 2011192213 A1, 11.08.2011. |

