Настоящее изобретение относится к измерительной технике, профилометрии, топографии, в частности к контактным методам измерений формы поверхности трехмерных объектов с помощью щуповых (зондовых) профилометров-профилографов, и может быть использовано в машиностроении, оптическом приборостроении, медицине, стоматологии, косметологии, судебно-медицинской экспертизе.
Известны устройства для измерения формы поверхности объектов - контактные щуповые профилометры (см. например, Б.С.Давыдов «Основы щупового метода определения шероховатости поверхности». - М.: «Стандартгиз», с.952; А.И.Карташев «Шероховатость поверхности и методы ее измерения». - М.: Издательство Государственного комитета стандартов, мер и измерительных приборов СССР, с.964). Основу профилометров составляет зонд, закрепленный в направляющих так, что он может двигаться в направлении измерения высоты рельефа поверхности, как правило, вертикальном. Величина вертикального перемещения зонда измеряется с помощью самых разнообразных методов - пневматических, электромеханических, пьезоэлектрических и оптических. Недостаток таких устройств (профилометров) заключается в ограниченной точности измерений профиля поверхности.
Для повышения точности измерений вертикальных перемещений зонда применяются интерференционные оптические методы. Сочетание контактного метода с интерференционным открывает возможность высокоточных измерений формы любой поверхности, как шероховатой, так и зеркальной.
Известны устройства, далее профилометры, с интерференционным способом регистрации перемещений зонда описанные, например, в патентах US 4714255, US 5565237. В патенте US 4714255 в верхней части зонда закреплен уголковый отражатель, который установлен в одной (объектной) ветви интерферометра. В процессе сканирования вертикальные перемещения отражателя приводят к изменению разности оптической длины пути (ОДП) между объектным и опорным пучками света, что регистрируется по изменению интерференционной картины.
В патенте US 5565237 зеркало, закрепленное в верхней части зонда, образовывало вместе с другим неподвижным зеркалом интерферометр Фабри-Перо. Поэтому вертикальные перемещения зонда приводили к нарушению условия резонанса, что использовалось для регистрации величины перемещения.
Недостатки перечисленных профилометров заключаются в том, что в один момент времени измерение производится только в одной точке, и, следовательно, для измерения профиля поверхности требуется двумерное сканирование зонда относительно объекта.
Известно устройство для измерения формы поверхности трехмерного объекта, описанное в патенте US 6701633 B2, наиболее близкое к предлагаемому устройству.
Это устройство для измерения формы поверхности трехмерного объекта в координатах X, Y, Z содержит обойму с множеством зондов, в нижней части которых жестко закреплен щуп, контактирующий с исходным объектом, а в верхней части жестко закреплен светоотражательный элемент, направляющие в обойме, которые позволяют зондам свободно перемещаться только вдоль Z направления, плоский опорный оптический элемент, оптическое устройство для измерения расстояния в Z направлении между отражательной поверхностью зондов и указанным плоским опорным оптическим элементом, механизм перемещения исходного трехмерного объекта и обоймы и ЭВМ для вычисления формы поверхности исходного трехмерного объекта на основании данных о координатах X, Y, Z.
Недостатками данного устройства являются ограничение области измерения формы поверхности только одной прямой, что не позволяет измерять трехмерную форму поверхности динамических объектов.
Целью настоящего изобретения является достижение возможности измерения трехмерной формы поверхности объектов в динамике с повышением точности измерений высоты объекта до нескольких нанометров при увеличенном диапазоне измерений высот до нескольких миллиметров.
Поставленная цель достигается тем, что в устройстве для измерения формы поверхности трехмерного объекта в координатах X, Y, Z, содержащим обойму с множеством зондов, в нижней части которых жестко закреплен щуп, контактирующий с исходным объектом, а в верхней части жестко закреплен светоотражательный элемент, направляющие в обойме, которые позволяют зондам свободно перемещаться только вдоль Z направления, плоский опорный оптический элемент, оптическое устройство для измерения расстояния в Z направлении между отражательной поверхностью зондов и указанным плоским опорным оптическим элементом, механизм перемещения исходного трехмерного объекта и ЭВМ для вычисления формы поверхности исходного трехмерного объекта на основании данных о координатах X, Y, Z используют матрицу из N зондов, размещенных в обойме с множеством из N указанных выше направляющих, расположенных в узлах двумерной сетки с известными координатами точек контакта щупов каждого зонда относительно центра обоймы, причем двумерная сетка может быть произвольной геометрической формы, а указанное выше оптическое устройство выполнено в виде интерферометра, содержащего источник когерентного света, оптическую систему, формирующую широкий параллельный пучок излучения, диаметр которого превышает размер области задания указанной выше двумерной сетки, светоделитель, матричный фотоприемник, на который с помощью объектива формируется изображение светоотражающих элементов из множества N вышеуказанных зондов.
Далее предлагаемое изобретение поясняется конкретными примерами его выполнения и прилагаемыми чертежами.
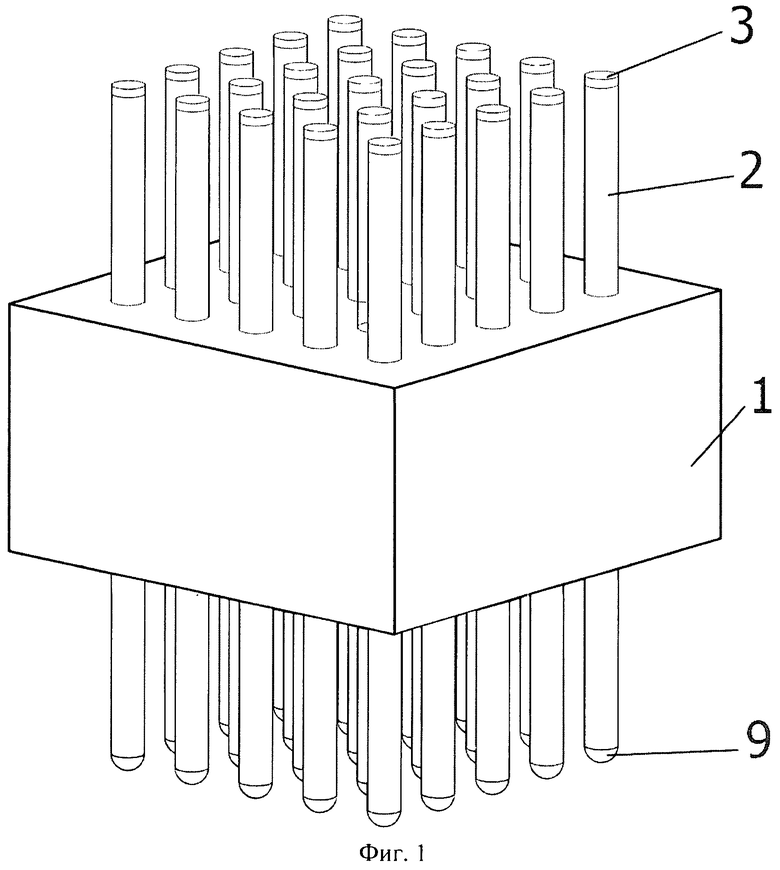
Фиг.1 изображает обойму 1 с матрицей из N зондов 2, содержащих в верхней части жестко закрепленные светоотражательные элементы 3.
Фиг.2 иллюстрирует принципиальную схему устройства - многозондового контактного интерференционного профилометра, в котором интерферометр выполнен по схеме Майкельсона. Профилометр состоит из источника когерентного света 4, например лазера; оптической системы 5, формирующей широкий параллельный пучок излучения, например коллиматор; светоделителя 6, например полупрозрачного клина или светоделительного кубика; плоского опорного оптического элемента 7, например плоского зеркала; светоотражательного элемента 3, например плоского зеркала; зонда 2; направляющих отверстий 8; обоймы 1; щупа 9; исходного трехмерного объекта 10; механизма перемещения 11 измеряемого трехмерного объекта 10, например трехкоординатного стола; объектива 12; матричного фотоприемника 13; компьютера 14.
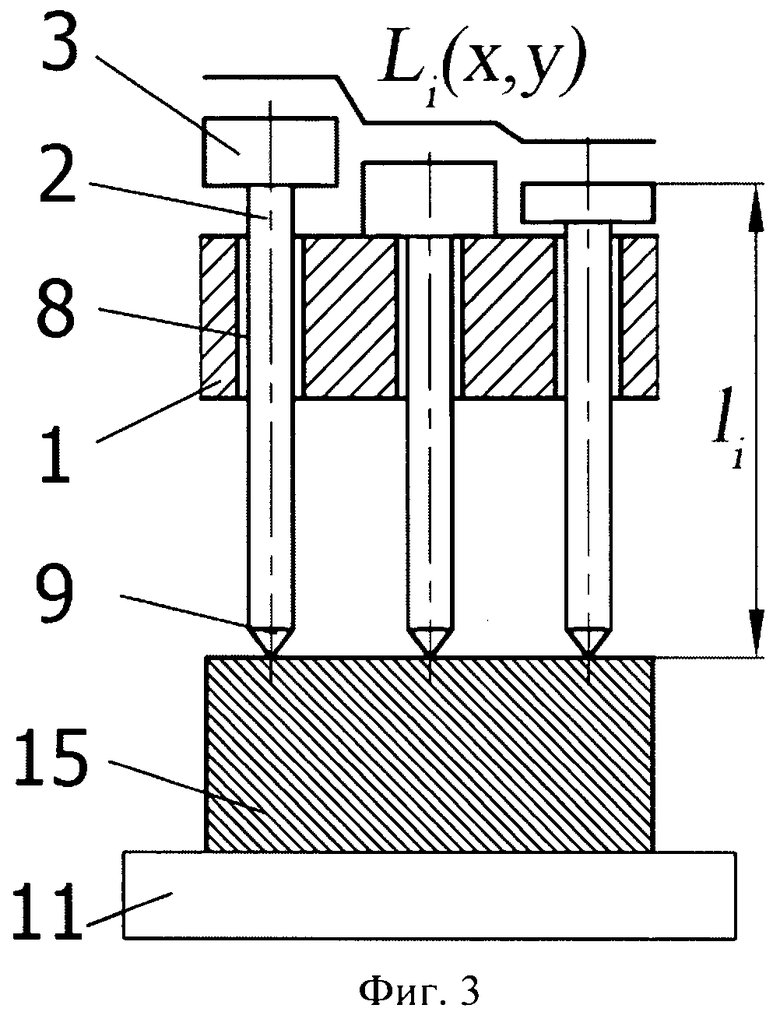
Фиг.3 иллюстрирует первый этап работы устройства.
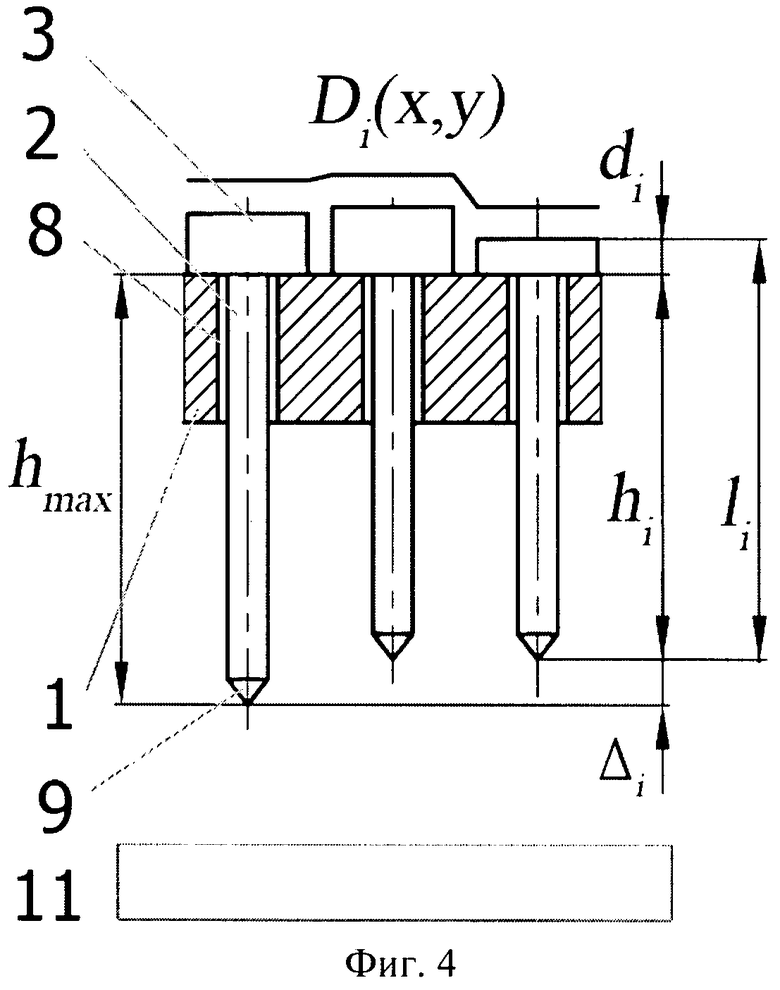
Фиг.4 иллюстрирует второй этап работы устройства - этап калибровки.
На Фиг.2 излучение от источника когерентного света 4 с помощью оптической системы 5 расширяется и формируется параллельный пучок излучения, который после светоделителя 6 делится на две части. Одна часть пучка направляется на опорное плоское зеркало 7 и отражается от него. Возможен вариант осуществления устройства, когда зеркало 7 закреплено на пьезоэлементе для реализации метода интерферометрии фазовых шагов.
Другая часть пучка лазерного излучения направляется на отражательные элементы 3, жестко соединенные с зондами 2. Зонды могут свободно двигаться вертикально в направляющих отверстиях 8 обоймы 1, контактируя щупами 9 с объектом 10, повторяя его форму. Объект 10 с помощью механизма 11 может перемещаться относительно обоймы 1 с зондами 2 в трех направлениях X, Y, Z. Излучение, отраженное от элементов 3, после светоделителя 6 соединяется с излучением от опорного зеркала 7 и направляется в регистрирующую ветвь интерферометра. Объектив 12 формирует интерференционное изображение отражательных элементов 3, которое регистрируется матричным фотоприемником 13. Причем интерферограмма каждого отражательного элемента 3 формируется на своем участке матричного фотоприемника 13. Так как отражательные элементы разделены друг от друга некоторым промежутком, то общая интерферограмма матрицы зондов будет состоять из N маленьких субинтерферограмм также разделенных участками без интерференционных полос. Далее все эти субинтерферограммы поступают в компьютер 14 для обработки и вычисления координат X, Y, Z объекта. Компьютер 14 также управляет пьезоэлементом, на котором закреплено зеркало 7, и механизмом перемещения 11 исходного трехмерного объекта.
При настройке интерферометра на бесконечно широкую полосу все субинтерферограммы также должны быть настроены на бесконечно широкую полосу. Однако отражательные элементы каждого зонда могут иметь небольшой наклон к оптической оси интерферометра. Поэтому на некоторых субинтерферограммах могут появиться полосы конечной толщины. При вертикальном перемещении зондов эти полосы будут смещаться в горизонтальном направлении. Поэтому далее будем считать, что все субинтерферограммы настроены на полосы конечной ширины.
Использование интерферометра в качестве оптического устройства для измерения расстояния в направлении Z между поверхностями отражательных элементов 3 зондов 2 и плоским опорным оптическим элементом 7 позволяет повысить точность этих измерений.
Возможны два варианта устройства, в которых интерферометр выполнен либо по схеме Майкельсона, либо по схеме Физо.
В последнем случае между светоделителем 6 и обоймой 1 с зондами 2 помещается плоскопараллельная или клиновидная пластина, которая играет роль плоского опорного отражательного элемента.
Возможны варианты осуществления устройства, когда светоотражательный элемент 3 выполнен в виде уголкового отражателя или плоского зеркала.
За счет использования матрицы из N зондов 2 (Фиг.1), размещенных в обойме 1 с множеством из N указанных выше направляющих 8, расположенных в узлах двумерной сетки, с известными координатами точек контакта каждого зонда относительно центра обоймы, измерение формы поверхности производится одновременно в каждой точке двумерного массива точек с известными координатами. Это позволяет отказаться от дополнительного сканирования и, следовательно, сократить время измерения. Измерение фактически может производиться в режиме реального времени. Тем самым решается важная техническая задача, а именно: обеспечивается возможность измерения трехмерной формы поверхности объектов в динамике. Поэтому данный способ можно применять для измерения формы поверхности динамических (нестационарных) объектов.
Возможны варианты осуществления устройства, когда двумерная сетка, в узлах которой размещаются зонды, представляет собой прямоугольную, гексагональную или радиально-круговую сетку.
Возможны варианты осуществления устройства, когда в качестве матричного фотоприемника используется ПЗС-камера, КМОП-камера (ПЗС - прибор с зарядовой связью, КМОП - комплиментарный металл-окисел полупроводник) или матрица фотодиодов.
Применение оптической системы 5, формирующей широкий параллельный пучок излучения, диаметр которого превышает размер области, занимаемой отражательными элементами 3, позволяет одновременно измерять координаты Z всех зондов 2. Для этой же цели используется предлагаемый матричный фотоприемник 13.
Устройство работает в три этапа следующим образом.
Первый этап - это калибровка профилометра. В этом случае в качестве объекта 10 используется эталон 15 (см. Фиг.3). Эталон имеет две плоскопараллельные поверхности, одна из которых (верхняя на Фиг.3) имеет полированную плоскую поверхность. Такой эталон может быть выполнен в виде супергладкого плоского зеркала из карбида кремния SiC, которое используется для калибровки интерференционных микропрофилометров. Эталон 15 устанавливается на механизм перемещения 11 и вводится в контакт со щупами 9 зондов 2. В таком стационарном состоянии эталона 15 производится регистрация интерферограммы зеркальной поверхности, образованной отражательными элементами 3 зондов 2. По этой интерферограмме восстанавливается двумерная карта высот Li(x, y) отражательных зондов 2 относительно самого короткого зонда (на Фиг.3 - крайнего правого). Такую карту высот далее будем называть топограммой. Этот этап необходим, так как практически невозможно сделать все зонды одинаковой длины.
Для повышения точности восстановленной топограммы можно использовать метод интерферометрии фазовых шагов. Поэтому возможен вариант осуществления устройства, когда источник когерентного света выполнен в виде лазера с перестройкой длины волны излучения для реализации метода фазовых шагов.
Полученная топограмма Li(x, y)связана с геометрической длиной li зонда следующим соотношением:

где lmin - минимальная длина зонда, относительно которого строится карта высот Li(x, y). Полученная топограмма записывается в память компьютера 14. В дальнейшем эта топограмма будет учитываться в процессе измерения топограммы исследуемого объекта.
Второй этап рабочего цикла устройства - это начало измерений. Зонды 2 под собственным весом или с помощью пружинок будут прижиматься к верхней плоской поверхности обоймы 1 (см. фиг.4). Неплоскостность этой поверхности, а также различие в толщинах отражательных элементов 3 приводит к тому, что зеркальная поверхность, образованная этими элементами, не будет плоской. Поэтому на втором этапе производится регистрация интерферограммы отражательных элементов 3 зондов 2 в положении их покоя, т.е. в момент прижима к обойме. По этой интерферограмме восстанавливается двумерная карта высот Di(x, y) отражательных элементов 3 относительно самого тонкого отражательного элемента (на фиг.4 - крайнего правого). Она связана с геометрической толщиной di следующим соотношением:

где dmin - минимальная толщина отражательного элемента, относительно которого строится карта высот Di(x, y). Восстановленная топограмма Di(x, y) записывается в память компьютера и будет учитываться в процессе измерения топограммы исследуемого объекта.
Из Фиг.4 видно, что длина выступающей из обоймы 1 части зондов зависит от длины hi зондов без учета толщины отражательных элементов 3 и толщины обоймы 1 (на Фиг.4 не обозначено). Эта длина определяет диапазон измеряемых высот. Из-за разной длины зондов 2 и толщины их отражательных элементов 3 длина выступающей части зондов будет разная. Разность длин Δi относительно максимальной длины зонда hmax (на Фиг.4 крайний слева) вычисляется через измеренные выше топограммы следующим образом:
Δi=hmax-hi=hmax-(li-di).
Подставляя в это выражение (1) и (2), получим:

В полученном выражении первое слагаемое в скобках есть некоторая константа, постоянная для всех зондов, а переменным является второе слагаемое.
Таким образом, после двух первых этапов в памяти компьютера записывается двумерная карта Δi(x, y) разности длин зондов, которая будет использоваться для коррекции результатов измерений формы поверхности исходного объекта. Эта коррекция необходима, т.к. даже при предъявлении идеально плоской поверхности одновременного касания всех щупов этой поверхности не произойдет из-за разброса в длинах зондов.
Третий этап рабочего цикла устройства - собственно измерение топограммы объекта Z(X, Y). Здесь возможны два варианта работы устройства.
Первый вариант - динамический. Объект 10 помещается на механизм перемещения 11 и в начальный момент времени он находится вне контакта со щупами 9 зондов 2. Затем он начинает плавно подниматься с помощью механизма 11. До касания объекта со щупами зондов полосы на всех вышеупомянутых субинтерферограммах будут неподвижны. Первое касание произойдет со щупом самого длинного зонда и на субинтерферограмме данного зонда интерференционные полосы начнут двигаться. С этого момента начинается непрерывная регистрация всех субинтерферограмм и запись их в память компьютера.
Скорости подъема объекта и регистрации кадров с интерферограммами должны быть согласованы. Для однозначного определения величины смещения интерференционных полос это смещение между кадрами не должно превышать λ/4, где λ - длина волны источника когерентного света. Если использовать камеру 13 со стандартной скоростью 25 кадров/сек, то скорость подъема объекта не должна превышать величины 25λ/4=6,25λ. Для длины волны He-Ne лазера λ=0,63 мкм эта скорость будет не больше 4 мкм/с. Для более скоростных камер, например Fastvideo-500, НПО Астек - фициального дилера фирмы "Фаствидео", у которых скорость достигает 500 кадров/с, скорость подъема объекта может достигать 30 мкм/с.
Остановку подъема объекта необходимо производить в тот момент, когда полосы начнут сдвигаться на всех субинтерферограммах, т.е. когда объект коснется последнего неподвижного зонда. В этот же момент можно остановить регистрацию интерферограмм. По набору полученных интерферограмм судят о величине вертикального перемещения каждого зонда Zi(X, Y). Метод обработки интерферограмм может заключаться в счете количества полос, на которые пробежали через центр субинтерферограммы, как в интерферометрах перемещений.
Второй вариант - статический. Его можно применять для прерывистого режима сканирования, когда сами измерения проводятся в момент достижения объектом всех зондов. В этом случае подъем объекта может быть быстрым.
Возможен другой способ измерения координаты Zoi каждого зонда - двухдлиноволновый метод оптической интерферометрии фазовых шагов.
В тот момент, когда все зонды 2 пришли в контакт с исследуемым объектом 10, поверхность, образованная всеми отражательными элементами 3 зондов 2, представляет собой кусочно-плоскую зеркальную поверхность наподобие ступенек. Таким образом, измеряемая непрерывная поверхность трехмерного объекта 10 как бы заменяется на разрывную зеркальную поверхность, составленную из множества маленьких плоских зеркал 3, нормали к которым совпадают с направлением Z, а расположение зеркал по высоте повторяет форму исследуемой поверхности. Такая замена позволяет расширить класс исследуемых объектов от шероховатых до зеркальных с большими градиентами высот профиля.
Перепад высот между зондами 2 (высота ступенек) зависит от градиента профиля исследуемой поверхности 10 и количества зондов. Как правило, исследуемая поверхность обладает большими перепадами высоты профиля. Это ведет к тому, что высота ступенек может превышать половину длины волны излучения источника 4, используемого в интерферометре. Поэтому для измерения профиля зеркальной поверхности, образованной зеркалами зондов, используется двухдлиноволновый метод (см., например, Yeou-Yen Cheng and James С.Wyant «Two-wavelength phase-shifting interferometry» APPLIED OPTICS, Vol.23, page 4532, 934). В этом случае последовательно во времени или одновременно регистрируется две интерферограммы с разными длинами волн излучения. Поэтому возможен вариант осуществления устройства, когда источник когерентного света 4 выполнен в виде двух лазеров с близкими длинами волн излучения для реализации метода двухдлиноволновой интерферометрии.
Оценим высоту ступеньки, которую можно измерять двухдлиноволновым методом, при одном из вариантов осуществления изобретения, а именно - в случае использования одномодовых лазерных модулей фирмы «ФТИ-Оптроник», г.Санкт-Петербург (www.fti-optronic.com) непрерывного излучения KLM-B650 с длиной волны λ1=0,65 мкм и KLM-В635 с длиной волны λ2=0,635 мкм. При этом эффективная длина волны составит:
λэф=λ1λ2/(λ1-λ2)=23 мкм.
Отсюда следует, что максимальная высота ступеньки не должна превышать λэф./2=11 мкм.
Оценим теперь высоту поверхности, например, клина, которую можно измерять предлагаемым способом. Пусть мы имеем матрицу из 32×32=824 зондов диаметром 1 мм, размещенных в узлах квадратной сетки с шагом 1 мм. Тогда вдоль одной стороны квадрата размером 32 мм укладывается 32 плоских зеркала. Следовательно, максимальная высота клина составляет 32×11 мкм=443 мкм, а угол клина 0,3°.
Метод фазовых шагов позволяет измерить высоту каждой ступеньки с точностью не хуже 1/800 доли длины волны. Это означает, что погрешность измерений двухдлиноволновым методом тоже будет порядка λэф/800=0,023 мкм при диапазоне измерений 0,45 мм и максимальном угле наклона поверхности около 1°. Для реализации метода фазовых шагов можно использовать сдвиг зеркала 7 вдоль оптической оси с помощью, например, пьезоэлемента.
Искомые высоты поверхности объекта в дискретных точках с координатами (X, Y) центров точек контакта щупов вычисляется по формуле:

Для вычисления непрерывной формы поверхности объекта или его топограммы необходимо выполнить математическую операцию аппроксимации поверхности по измеренным данным. В случае необходимости можно переместить объект 10 с помощью механизма 11 в плоскости (X, Y) и повторить измерения.
Коррекция измеренных высот по формуле (4) позволяет повысить точность измерений формы поверхности объекта.
Хотя заявляемое в качестве изобретения устройство описано на примере ряда его конкретных вариантов осуществления, для специалистов будут ясны возможности многочисленных модификаций данного устройства, не выходящие за границы идеи и объема правовой охраны изобретения, определяемые прилагаемой формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА | 2011 |
|
RU2472108C1 |
| Способ исследования микрообъектов и ближнепольный оптический микроскоп для его реализации | 2016 |
|
RU2643677C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ МИКРОСКОП | 2013 |
|
RU2527316C1 |
| СПОСОБ ИНТЕРФЕРЕНЦИОННОЙ МИКРОСКОПИИ | 2013 |
|
RU2536764C1 |
| Установка для измерения микрорельефа поверхности с использованием метода фазовых шагов | 2018 |
|
RU2677239C1 |
| ФАЗОВО-ИНТЕРФЕРЕНЦИОННЫЙ МОДУЛЬ | 2013 |
|
RU2539747C1 |
| Частотный способ измерения дальности с измерением частоты биений голографической измерительной системой | 2021 |
|
RU2765727C1 |
| СПОСОБ УДАЛЕННОГО КОНТРОЛЯ ФОРМЫ ПОВЕРХНОСТИ И ТОЛЩИНЫ ПОКРЫТИЙ, ПОЛУЧАЕМЫХ В ПРОЦЕССЕ МАГНЕТРОННОГО ВАКУУМНОГО НАПЫЛЕНИЯ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2549211C1 |
| Голографический способ формирования радиочастотных электрических колебаний на дискретных частотах | 2023 |
|
RU2813988C1 |
| СПОСОБ ПОЛУЧЕНИЯ ОПТИЧЕСКИХ ТРЕХМЕРНЫХ И СПЕКТРАЛЬНЫХ ИЗОБРАЖЕНИЙ МИКРООБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574791C2 |
Изобретение относится к измерительной технике, а именно к профилометрии, топографии. Устройство для измерения формы поверхности трехмерного объекта в координатах X, Y, Z включает матрицу зондов, в нижней части которых жестко закреплен щуп, а в верхней части - светоотражательный элемент, размещенных в обойме с множеством направляющих, расположенных в узлах двумерной сетки с известными координатами точек контакта щупов каждого зонда относительно центра обоймы, позволяющих каждому зонду свободно двигаться вдоль оси Z, причем двумерная сетка может быть произвольной геометрической формы. Также включает механизм перемещения трехмерного объекта и обоймы для вычисления формы поверхности исходного объекта на основании данных о координатах X, Y, Z, ЭВМ, плоский опорный оптический элемент, оптическое устройство в виде интерферометра для измерения расстояния в Z направлении между отражательной поверхностью зондов и плоским опорным оптическим элементом, содержащее источник когерентного света, оптическую систему, формирующую широкий параллельный пучок света, диаметр которого превышает размер области задания двумерной сетки, светоделитель, матричный фотоприемник, на котором с помощью объектива формируется изображение светоотражающих элементов из матрицы зондов. Технический результат заключается в обеспечении возможности измерения формы поверхности трехмерных объектов в динамике и в повышении точности измерений. 35 з.п. ф-лы, 4 ил.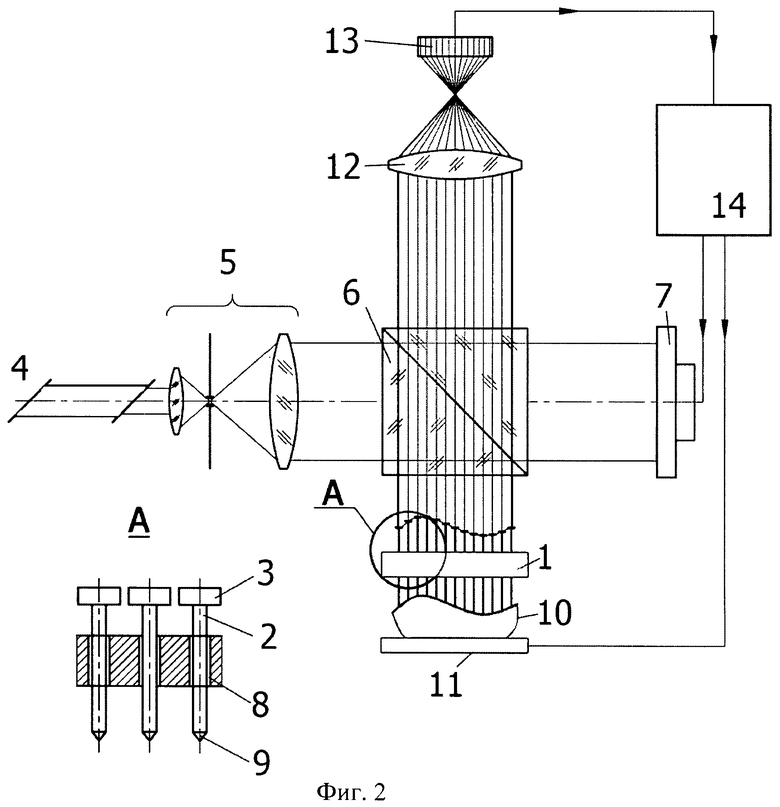
1. Устройство для измерения формы поверхности трехмерного объекта в координатах X, Y, Z, содержащее обойму с множеством зондов, в нижней части которых жестко закреплен щуп, контактирующий с измеряемым объектом, а в верхней части жестко закреплен светоотражательный элемент, направляющие в обойме, которые позволяют зондам свободно перемещаться только вдоль Z направления, плоский опорный оптический элемент, оптическое устройство для измерения расстояния в Z направлении между отражательной поверхностью зондов и указанным плоским опорным оптическим элементом, механизм перемещения исходного трехмерного объекта и обоймы и ЭВМ для вычисления формы поверхности исходного трехмерного объекта на основании данных о координатах X, Y, Z, отличающееся тем, что используют матрицу из N зондов, размещенных в обойме с множеством из N указанных выше направляющих, расположенных в узлах двумерной сетки с известными координатами точек контакта щупов каждого зонда относительно центра обоймы, причем двумерная сетка может быть произвольной геометрической формы, а указанное выше оптическое устройство выполнено в виде интерферометра, содержащего источник когерентного света, оптическую систему, формирующую широкий параллельный пучок излучения, диаметр которого превышает размер области задания указанной выше двумерной сетки, светоделитель, матричный фотоприемник, на котором с помощью объектива формируется изображение светоотражающих элементов из множества N вышеуказанных зондов.
2. Устройство для измерения формы поверхности трехмерного объекта по п.1, отличающееся тем, что интерферометр выполнен по схеме Майкельсона.
3. Устройство для измерения формы поверхности трехмерного объекта по п.1, отличающееся тем, что интерферометр выполнен по схеме Физо.
4. Устройство для измерения формы поверхности трехмерного объекта по любому из пп.1-3, отличающееся тем, что светоотражательный элемент выполнен в виде уголкового отражателя.
5. Устройство для измерения формы поверхности трехмерного объекта по любому из пп.1-3, отличающееся тем, что светоотражательный элемент выполнен в виде плоского зеркала.
6. Устройство для измерения формы поверхности трехмерного объекта по любому из пп.1-3, отличающееся тем, что источник когерентного света выполнен в виде лазера с перестройкой длины волны излучения для реализации метода фазовых шагов.
7. Устройство для измерения формы поверхности трехмерного объекта по п.4, отличающееся тем, что источник когерентного света выполнен в виде лазера с перестройкой длины волны излучения для реализации метода фазовых шагов.
8. Устройство для измерения формы поверхности трехмерного объекта по п.5, отличающееся тем, что источник когерентного света выполнен в виде лазера с перестройкой длины волны излучения для реализации метода фазовых шагов.
9. Устройство для измерения формы поверхности трехмерного объекта по любому из пп.1-3, отличающееся тем, что источник когерентного света выполнен в виде двух лазеров с близкими длинами волн излучения для реализации метода двухдлиноволновой интерферометрии.
10. Устройство для измерения формы поверхности трехмерного объекта по п.4, отличающееся тем, что источник когерентного света выполнен в виде двух лазеров с близкими длинами волн излучения для реализации метода двухдлиноволновой интерферометрии.
11. Устройство для измерения формы поверхности трехмерного объекта по п.5, отличающееся тем, что источник когерентного света выполнен в виде двух лазеров с близкими длинами волн излучения для реализации метода двухдлиноволновой интерферометрии.
12. Устройство для измерения формы поверхности трехмерного объекта по любому из пп.1 и 2, отличающееся тем, что опорный плоский оптический элемент выполнен в виде плоского зеркала, закрепленного на пьезоэлементе для реализации метода фазовых шагов.
13. Устройство для измерения формы поверхности трехмерного объекта по п.4, отличающееся тем, что опорный плоский оптический элемент выполнен в виде плоского зеркала, закрепленного на пьезоэлементе для реализации метода фазовых шагов.
14. Устройство для измерения формы поверхности трехмерного объекта по п.5, отличающееся тем, что опорный плоский оптический элемент выполнен в виде плоского зеркала, закрепленного на пьезоэлементе для реализации метода фазовых шагов.
15. Устройство для измерения формы поверхности трехмерного объекта по п.7, отличающееся тем, что опорный плоский оптический элемент выполнен в виде плоского зеркала, закрепленного на пьезоэлементе для реализации метода фазовых шагов.
16. Устройство для измерения формы поверхности трехмерного объекта по любому из пп.1-3, 7, 8, 10, 11, 13, 14, 15 отличающееся тем, что в качестве матричного фотоприемника используется ПЗС-камера.
17. Устройство для измерения формы поверхности трехмерного объекта по п.4, отличающееся тем, что в качестве матричного фотоприемника используется ПЗС-камера.
18. Устройство для измерения формы поверхности трехмерного объекта по п.5, отличающееся тем, что в качестве матричного фотоприемника используется ПЗС-камера.
19. Устройство для измерения формы поверхности трехмерного объекта по п.6, отличающееся тем, что в качестве матричного фотоприемника используется ПЗС-камера.
20. Устройство для измерения формы поверхности трехмерного объекта по п.9, отличающееся тем, что в качестве матричного фотоприемника используется ПЗС-камера.
21. Устройство для измерения формы поверхности трехмерного объекта по п.12, отличающееся тем, что в качестве матричного фотоприемника используется ПЗС-камера.
22. Устройство для измерения формы поверхности трехмерного объекта по любому из пп.1-3, 7, 8, 10, 11, 13, 14, 15 отличающееся тем, что в качестве матричного фотоприемника используется КМОП-камера.
23. Устройство для измерения формы поверхности трехмерного объекта по п.4, отличающееся тем, что в качестве матричного фотоприемника используется КМОП-камера.
24. Устройство для измерения формы поверхности трехмерного объекта по п.5, отличающееся тем, что в качестве матричного фотоприемника используется КМОП-камера.
25. Устройство для измерения формы поверхности трехмерного объекта по п.6, отличающееся тем, что в качестве матричного фотоприемника используется КМОП-камера.
26. Устройство для измерения формы поверхности трехмерного объекта по п.9, отличающееся тем, что в качестве матричного фотоприемника используется КМОП-камера.
27. Устройство для измерения формы поверхности трехмерного объекта по п.12, отличающееся тем, что в качестве матричного фотоприемника используется КМОП-камера.
28. Устройство для измерения формы поверхности трехмерного объекта по любому из пп.1-3, 7, 8, 10, 11, 13, 14, 15 отличающееся тем, что в качестве матричного фотоприемника используется матрица фотодиодов.
29. Устройство для измерения формы поверхности трехмерного объекта по п.4, отличающееся тем, что в качестве матричного фотоприемника используется матрица фотодиодов.
30. Устройство для измерения формы поверхности трехмерного объекта по п.5, отличающееся тем, что в качестве матричного фотоприемника используется матрица фотодиодов.
31. Устройство для измерения формы поверхности трехмерного объекта по п.6, отличающееся тем, что в качестве матричного фотоприемника используется матрица фотодиодов.
32. Устройство для измерения формы поверхности трехмерного объекта по п.9, отличающееся тем, что в качестве матричного фотоприемника используется матрица фотодиодов.
33. Устройство для измерения формы поверхности трехмерного объекта по п.12, отличающееся тем, что в качестве матричного фотоприемника используется матрица фотодиодов.
34. Устройство для измерения формы поверхности трехмерного объекта по п.1, отличающееся тем, что двумерная сетка, в узлах которой размещаются зонды, представляет собой прямоугольную сетку.
35. Устройство для измерения формы поверхности трехмерного объекта по п.1, отличающееся тем, что двумерная сетка, в узлах которой размещаются зонды, представляет собой гексогональную сетку.
36. Устройство для измерения формы поверхности трехмерного объекта по п.1, отличающееся тем, что двумерная сетка, в узлах которой размещаются зонды, представляет собой радиально-круговую сетку.
| US 6701633 B2, 09.03.2004 | |||
| JP 2006275826 A, 12.10.2006 | |||
| US 7220962 B2, 22.05.2007 | |||
| СПОСОБ КОНТРОЛЯ ПРОФИЛЯ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2263879C2 |

