Настоящее изобретение относится к измерительной технике, профилометрии, топографии, в частности к контактным методам измерений формы поверхности трехмерных объектов с помощью щуповых (зондовых) профилометров-профилографов, и может быть использовано в машиностроении, оптическом приборостроении, медицине, стоматологии, косметологии, судебно-медицинской экспертизе.
Известны контактные щуповые методы измерения формы поверхности, см. например, Б.С.Давыдов «Основы щупового метода определения шероховатости поверхности», М.: «Стандартгиз», 1959; А.И.Карташев «Шероховатость поверхности и методы ее измерения», М.: Издательство Государственного комитета стандартов, мер и измерительных приборов СССР, 1964. Суть этих методов заключается в ощупывании (сканировании) исследуемой поверхности с помощью твердотельного зонда (алмазной иглы конической формы или др.). Этот зонд закреплен в направляющих так, что он может двигаться в направлении измерения высоты рельефа поверхности, как правило, вертикальном. Величина вертикального перемещения зонда измеряется с помощью самых разнообразных методов - пневматических, электромеханических, пьезоэлектрических и оптических. Недостаток этих методов заключается в ограниченной точности измерений профиля поверхности.
Для повышения точности измерений вертикальных перемещений зонда стали применяться интерференционные оптические методы. Преимущество такого подхода заключается в том, что его можно применять для любого типа поверхности, в том числе шероховатого, а не только зеркального, как в случае интерференционных методов профилометрии.
Известны методы зондовой, контактной профилометрии с интерференционным способом регистрации перемещений зонда, описанные, например, в патентах US 4717255, US 5565987. В патенте US 4717255 в верхней части зонда закреплен уголковый отражатель, который установлен в одной (объектной) ветви интерферометра. В процессе сканирования вертикальные перемещения отражателя приводят к изменению разности оптической длины пути (ОДП) между объектным и опорным пучками света, что регистрируется по изменению интерференционной картины.
В патенте US 5565987 зеркало, закрепленное в верхней части зонда, образовывало вместе с другим неподвижным зеркалом интерферометр Фабри-Перо. Поэтому вертикальные перемещения зонда приводили к нарушению условия резонанса, что использовалось для регистрации величины перемещения.
Недостатки перечисленных методов заключаются в том, что в один момент времени измерение производится только в одной точке и, следовательно, для измерения профиля поверхности требуется двумерное сканирование зонда относительно объекта.
Известен способ измерения формы поверхности трехмерного объекта, описанный в патенте US 6701633 B2, наиболее близкий к описываемому способу.
Этот способ измерения формы поверхности трехмерного объекта в координатах X,Y,Z, где ось Z направлена перпендикулярно измеряемой поверхности, заключается в том, что используют множество зондов, размещенных в обойме с множеством параллельных направляющих, позволяющих каждому зонду свободно двигаться только вдоль Z направления, осуществляют контакт всех зондов с поверхностью объекта и измеряют координату Z каждого зонда в положении контакта, осуществляют взаимное перемещение исходного трехмерного объекта и обоймы с множеством зондов в плоскости X,Y и повторяют измерения, вычисляют форму поверхности объекта на основании полученных измерений.
Преимуществом данного способа является использование множества зондов, размещенных вдоль одного направления, что позволяет сразу измерять профиль поверхности вдоль одной прямой, а не в точке, как в обычных способах контактной профилометрии с одним зондом.
Недостатками данного способа являются ограничение области измерения формы поверхности только одной прямой, что не позволяет измерять трехмерную форму поверхности динамических объектов.
Целью изобретения является достижение возможности измерения трехмерной формы поверхности объектов в динамике с повышением точности измерений высоты объекта до нескольких нанометров при увеличенном диапазоне измерений высот до нескольких миллиметров.
Поставленная цель достигается тем, что в способе измерения формы поверхности трехмерного объекта в координатах X,Y,Z, где ось Z направлена перпендикулярно измеряемой поверхности, заключающемся в том, что используют множество зондов, содержащих в верхней части жестко закрепленные светоотражательные элементы и размещенных в обойме с множеством параллельных направляющих, позволяющих каждому зонду свободно двигаться только вдоль Z направления, осуществляют контакт всех зондов с поверхностью объекта и измеряют координату Z каждого зонда в положении контакта, осуществляют взаимное перемещение исходного трехмерного объекта и обоймы с множеством зондов в плоскости X,Y и повторяют измерения, вычисляют форму поверхности объекта на основании полученных измерений, используют матрицу из N зондов, размещенных в обойме с множеством из N указанных выше направляющих, расположенных в узлах двумерной сетки, с известными координатами Xi,Yi, i=1, 2, …, N, точек контакта каждого 1-го зонда относительно центра обоймы, предварительно калибруют матрицу зондов по высоте, выполняя измерение координат Zi каждого i-го зонда в положении контакта всех зондов с эталонной плоской гладкой поверхностью, нормаль к которой совпадает с Z направлением, при взаимном перемещении исходного трехмерного объекта и обоймы с матрицей зондов в плоскости X,Y измеряют координаты Xo,Yo центра обоймы и координаты Zoi каждого зонда в положении контакта всех зондов с объектом, вычисление формы поверхности осуществляют на основании данных о разности указанных выше координат Xo-Xi, Yo-Yi, Zoi-Zi, после чего в случае необходимости повторяют указанные выше шаги для измерения других участков поверхности объекта.
Возможен 2-ой вариант способа измерения формы поверхности трехмерного объекта в координатах X,Y,Z, отличающийся тем, что измерение координаты Zoi каждого зонда осуществляется методом многоканальной оптической интерферометрии перемещений.
Возможен 3-ий вариант способа измерения формы поверхности трехмерного объекта в координатах X,Y,Z, отличающийся тем, что измерение координаты Zoi каждого зонда осуществляется двухдлиноволновым методом оптической интерферометрии фазовых шагов.
Далее предлагаемое изобретение поясняется конкретными примерами его выполнения и прилагаемыми чертежами.
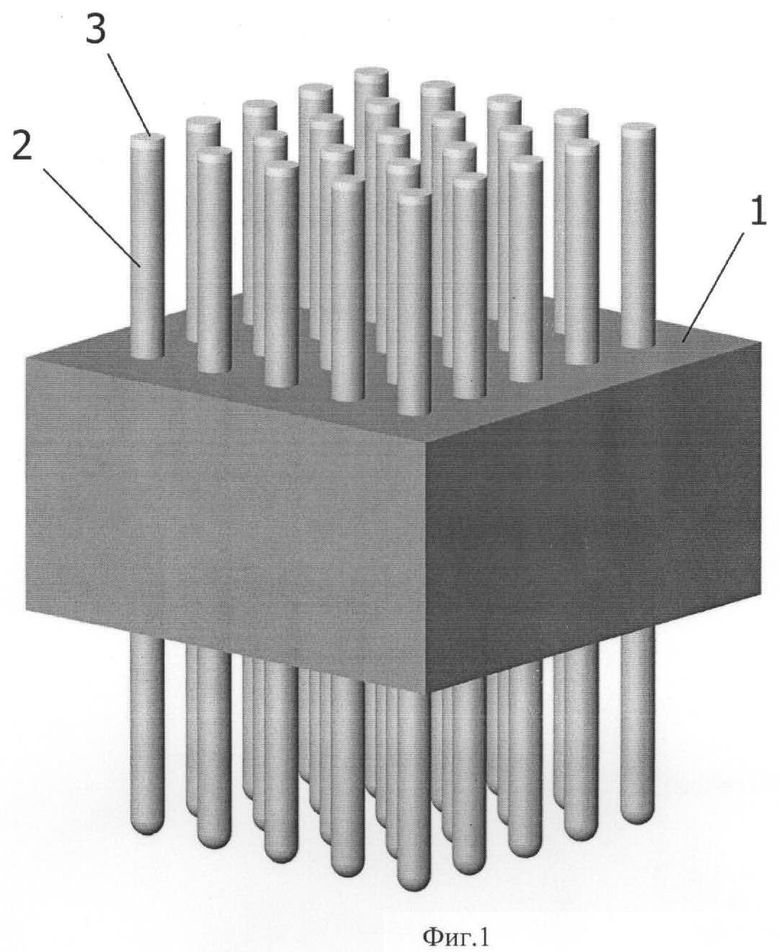
Фиг.1 изображает обойму 1 с матрицей из N зондов 2, содержащих в верхней части жестко закрепленные светоотражательные элементы 3.
Фиг.2 иллюстрирует принципиальную схему интерферометра для измерения координаты Zoi каждого зонда методом многоканальной оптической интерферометрии перемещений или двухдлиноволновым методом оптической интерферометрии фазовых шагов.
На Фиг.2 лазерный пучок 4, попадая на светоделитель 5, делится на две части. Одна часть пучка направляется на опорное плоское зеркало 6 и отражается от него. Зеркало 5 может быть закреплено на пьезоэлементе для реализации метода интерферометрии фазовых шагов. Другая часть пучка лазерного излучения направляется на отражательные элементы 7, жестко соединенные с зондами 8. Зонды могут свободно двигаться вертикально в направляющих обоймы 9, повторяя форму объекта 10. Лазерное излучение, отраженное от элементов 7, после светоделителя 5 соединяется с излучением от опорного зеркала 6 и направляется в регистрирующую ветвь интерферометра. С помощью объектива 11 интерферограмма отражательных элементов 7 регистрируется матричным фотоприемником 12.
За счет использования матрицы из N зондов 2 (Фиг.1), размещенных в обойме 1 с множеством из N указанных выше направляющих, расположенных в узлах двумерной сетки, с известными координатами Xi,Yi, i=1, 2, …, N, точек контакта каждого i-го зонда относительно центра обоймы, измерение формы поверхности производится одновременно в каждой точке двумерного массива точек с известными координатами. Это позволяет отказаться от дополнительного сканирования и, следовательно, сократить время измерения. Измерение фактически может производиться в режиме реального времени. Тем самым решается важная техническая задача, а именно: обеспечивается возможность измерения трехмерной формы поверхности объектов в динамике. Поэтому данный способ можно применять для измерения формы поверхности динамических (нестационарных) объектов.
Предварительная калибровка матрицы зондов по высоте путем измерения координат Zi каждого i-го зонда в положении контакта всех зондов с эталонной плоской гладкой поверхностью, нормаль к которой совпадает с Z направлением, позволяет измерить разброс зондов по высоте, который неизбежно возникает при их изготовлении и сборке матрицы зондов. Эти данные в дальнейшем вычитаются из измеренных координат Z при вычислении формы поверхности, что ведет, в конечном счете, к повышению точности измерений.
В отличие от прототипа при взаимном перемещении исходного трехмерного объекта и обоймы с матрицей зондов в плоскости X,Y измеряют только координаты Xo,Yo центра обоймы, а не всех зондов. Это вызвано тем, что при калибровке матрицы зондов одновременно измеряются координаты X,Y всех зондов относительно, например, центра матрицы, и они остаются неизменными при перемещениях обоймы. Таким образом, уменьшается количество измерений по сравнению с прототипом и, следовательно, уменьшается время сканирования.
Вычисление формы поверхности осуществляют на основании данных о разности указанных выше координат Xo-Xi, Yo-Yi, Zoi-Zi, после чего в случае необходимости повторяют указанные выше шаги для измерения других участков поверхности объекта. Использование разностных данных позволяет повысить точность измерений профиля поверхности.
Как указывалось выше, в предлагаемом способе один из возможных вариантов измерения координаты Zoi каждого зонда реализуется с использованием метода многоканальной оптической интерферометрии перемещений.
Этот способ применяется для динамического режима сканирования, когда измерения проводятся в течение всего процесса взаимного сближения исходного трехмерного объекта 10 (Фиг.2) и обоймы 9 с матрицей зондов 8 в Z направлении вплоть до контакта всех N зондов с поверхностью исходного трехмерного объекта 10 и остановки матрицы зондов.
Каждый зонд 8 в верхней части содержит жестко закрепленный отражательный элемент 7, например плоское зеркало или уголковый отражатель. Зеркальная поверхность, образованная этими отражательными элементами 7 зондов 8, помещается в объектное плечо, например, интерферометра Майкельсона, образованное элементами 5, 7-10, а в опорном плече из элементов 5, 6 находится сплошное плоское зеркало 6. При использовании широкого пучка лазерного излучения 4, размер которого позволяет осветить всю зеркальную поверхность, образованную отражательными элементами зондов 7, на выходе интерферометра будет формироваться интерференционная картина, состоящая из множества N отдельных субинтерферограмм 13. Каждая такая субинтерферограмма 13 несет информацию о вертикальном положении соответствующего зонда 8, т.е. о его Zoi координате. При непрерывном взаимном сближении объекта 10 и обоймы 9 с матрицей зондов 8 полосы в субинтерферограммах 13 будут сдвигаться. Используя алгоритмы счета полос и др., которые применяются в интерферометрах перемещений (см., например, Коронкевич В.П., Соболев B.C., Дубнищев Ю.Н. Лазерная интерферометрия. - Н.:, Наука, 1983, Глава 1. Интерферометры перемещений), можно с высокой точностью измерить координаты Zoi каждого зонда. Момент прекращения взаимного сближения фиксируется по началу сдвига полос во всех N субинтерферограммах.
Возможен другой способ измерения координаты Zoi каждого зонда - двухдлиноволновый метод оптической интерферометрии фазовых шагов. Этот способ применяется для статического режима сканирования, когда измерения проводятся в момент останова матрицы зондов.
В тот момент, когда все зонды 8 (Фиг.2) достигли исследуемой поверхности объекта 10, поверхность, образованная всеми отражательными элементами 7 зондов 8, представляет собой кусочно-плоскую зеркальную поверхность наподобие ступенек. Таким образом, исходная непрерывная поверхность трехмерного объекта 10 как бы заменяется на разрывную зеркальную поверхность, составленную из множества маленьких плоских зеркал 7, нормали к которым совпадают с направлением Z, а расположение зеркал по высоте повторяет форму исследуемой поверхности. Такая замена позволяет расширить класс исследуемых объектов от шероховатых до зеркальных с большими градиентами высот профиля.
Зеркальная поверхность, образованная этими отражательными элементами 7 зондов 8, помещается в объектное плечо, например, интерферометра Майкельсона, образованное элементами 5, 7-10, а в опорном плече из элементов 5, 6 находится сплошное плоское зеркало 6.
Перепад высот между зондами 8 (высота ступенек) зависит от градиента профиля исследуемой поверхности 10 и количества зондов. Как правило, исследуемая поверхность обладает большими перепадами высоты профиля. Это ведет к тому, что высота ступенек может превышать половину длины волны излучения 4, используемого в интерферометре. Поэтому для измерения профиля зеркальной поверхности, образованной зеркалами 7 зондов 8, используется двухдлиноволновый метод (см., например, Yeou-Yen Cheng and James C. Wyant «Two-wavelength phase-shifting interferometry» APPLIED OPTICS, Vol.23, page 4539, 1984). В этом случае последовательно во времени или одновременно регистрируются две интерферограммы с разными длинами волн излучения 4.
Ниже дана оценка высоты ступеньки, которую можно измерять двухдлиноволновым методом, при одном из вариантов осуществления изобретения, а именно - в случае использования одномодовых лазерных модулей фирмы «ФТИ-Оптроник», г.Санкт-Петербург (www.fti-optronic.com) непрерывного излучения KLM-В650 с длиной волны λ1=0,65 мкм и KLM-B635 с длиной волны λ2=0,635 мкм. При этом эффективная длина волны составит:
λэф=λ1λ2/(λ1-λ2)=28 мкм.
Отсюда следует, что максимальная высота ступеньки не должна превышать λэф/2=14 мкм.
Оценим теперь высоту поверхности, например, клина, которую можно измерять предлагаемым способом. Пусть мы имеем матрицу из 32×32=1024 зондов диаметром 1 мм, размещенных в узлах квадратной сетки с шагом 1 мм. Тогда вдоль одной стороны квадрата размером 32 мм укладывается 32 плоских зеркала. Следовательно, максимальная высота клина составляет 32×14 мкм=448 мкм, а угол клина 0,8°.
Метод фазовых шагов позволяет измерить высоту каждой ступеньки с точностью не хуже 1/1000 доли длины волны. Это означает, что погрешность измерений двухдлиноволновым методом тоже будет порядка λэф/1000=0,028 мкм при диапазоне измерений 0,45 мм и максимальном угле наклона поверхности около 1°. Для реализации метода фазовых шагов можно использовать сдвиг зеркала 6 вдоль оптической оси с помощью, например, пьезоэлемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА | 2011 |
|
RU2474787C1 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА | 2002 |
|
RU2211440C1 |
| СПОСОБ ОПТИЧЕСКОЙ ТОМОГРАФИИ ТРЕХМЕРНЫХ МИКРООБЪЕКТОВ И МИКРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2145109C1 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2003 |
|
RU2232373C1 |
| УСТРОЙСТВО ТРЕХМЕРНОГО СКАНИРОВАНИЯ СЦЕНЫ С НЕЛАМБЕРТОВЫМИ ЭФФЕКТАМИ ОСВЕЩЕНИЯ | 2014 |
|
RU2573767C1 |
| СПОСОБ ИНТЕРФЕРЕНЦИОННОЙ МИКРОСКОПИИ | 2013 |
|
RU2536764C1 |
| СПОСОБ КОНФОКАЛЬНОЙ СКАНИРУЮЩЕЙ ТРЕХМЕРНОЙ МИКРОСКОПИИ И КОНФОКАЛЬНЫЙ СКАНИРУЮЩИЙ ТОМОГРАФИЧЕСКИЙ МИКРОСКОП | 1999 |
|
RU2140661C1 |
| Способ определения координат изменения структуры клетки по фазовым изображениям | 2021 |
|
RU2761480C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ МИКРОСКОП | 2013 |
|
RU2527316C1 |
| Способ определения частоты и амплитуды модуляции фазы волнового фронта, создаваемого колебаниями мембраны клетки | 2020 |
|
RU2743973C1 |
Изобретение относится к измерительной технике, а именно к профилометрии, топографии. Способ измерения формы поверхности трехмерного объекта заключается в использовании матрицы зондов, содержащих в верхней части жестко закрепленные светоотражательные элементы, размещенных в обойме с множеством параллельных направляющих, расположенных в узлах двумерной сетки с известными координатами Xi,Yi точек контакта каждого зонда относительно центра обоймы, позволяющих каждому зонду свободно двигаться вдоль оси Z, перпендикулярной измеряемой поверхности. Предварительно осуществляют калибровку матрицы зондов по высоте путем измерения координат Zi каждого зонда в положении контакта всех зондов с эталонной плоской гладкой поверхностью, нормаль к которой совпадает с Z направлением. При взаимном перемещении исходного трехмерного объекта и обоймы с матрицей зондов в плоскости XY измеряют координаты Xo,Yo центра обоймы и координат Zoi каждого зонда в положении контакта всех зондов с объектом, формы поверхности вычисляют на основании данных о разности указанных выше координат Xo-Xi, Yo-Yi, Zoi-Zi и повторяют измерения при необходимости. Технический результат заключается в обеспечении возможности измерения формы поверхности динамических объектов, в повышении точности измерений высоты трехмерных объектов и в уменьшении времени сканирования. 2 з.п. ф-лы, 2 ил.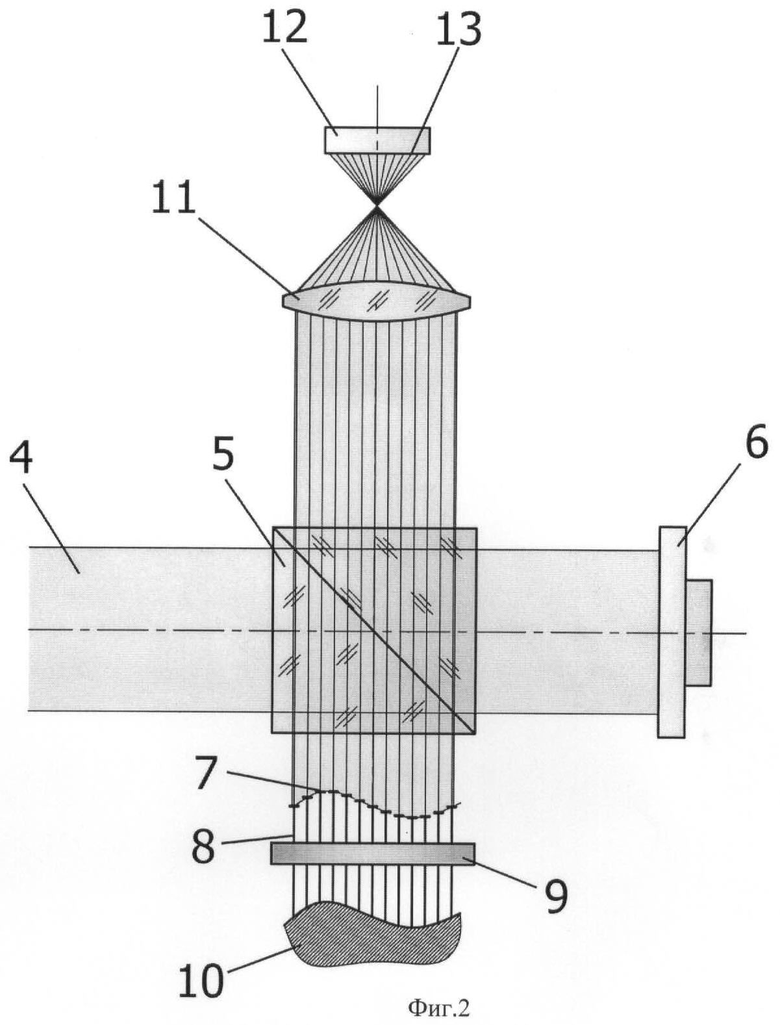
1. Способ измерения формы поверхности трехмерного объекта в координатах X,Y, Z, где ось Z направлена перпендикулярно измеряемой поверхности, заключающийся в том, что используют множество зондов, содержащих в верхней части жестко закрепленные светоотражательные элементы и размещенных в обойме с множеством параллельных направляющих, позволяющих каждому зонду свободно двигаться только вдоль Z направления, осуществляют контакт всех зондов с поверхностью объекта и измеряют координату Z каждого зонда в положении контакта, осуществляют взаимное перемещение исходного трехмерного объекта и обоймы с множеством зондов в плоскости X,Y и повторяют измерения, вычисляют форму поверхности объекта на основании полученных измерений, отличающийся тем, что используют матрицу из N зондов, размещенных в обойме с множеством из N указанных выше направляющих, расположенных в узлах двумерной сетки, с известными координатами Xi,Yi, i=1, 2, …, N, точек контакта каждого i-го зонда относительно центра обоймы, предварительно калибруют матрицу зондов по высоте, выполняя измерение координат Zi каждого i-го зонда в положении контакта всех зондов с эталонной плоской гладкой поверхностью, нормаль к которой совпадает с Z направлением, при взаимном перемещении исходного трехмерного объекта и обоймы с матрицей зондов в плоскости X,Y измеряют координаты Xo,Yo центра обоймы и координаты Zoi каждого зонда в положении контакта всех зондов с объектом, вычисление формы поверхности осуществляют на основании данных о разности указанных выше координат Xo-Xi, Yo-Yi, Zoi-Zi, после чего в случае необходимости повторяют указанные выше шаги для измерения других участков поверхности объекта.
2. Способ измерения формы поверхности трехмерного объекта в координатах X,Y, Z по п.1, отличающийся тем, что измерение координаты Zoi каждого зонда осуществляется методом многоканальной оптической интерферометрии перемещений.
3. Способ измерения формы поверхности трехмерного объекта в координатах X,Y, Z по п.1, отличающийся тем, что измерение координаты Zoi каждого зонда осуществляется двухдлиноволновым методом оптической интерферометрии фазовых шагов.
| US 6701633 B2, 09.03.2004 | |||
| JP 2006275826 A, 12.10.2006 | |||
| US 2008055598 A1, 06.03.2008 | |||
| СПОСОБ КОНТРОЛЯ ПРОФИЛЯ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2263879C2 |

