Изобретение относится к ракетно-космической технике и может быть использовано для приведения отработавшего ускорителя - отделяющейся части первой (ОЧ) ступени ракеты космического назначения (РКН) в ограниченный район падения для уменьшения воздействия РКН на экологическое состояние района эксплуатации.
Известен способ спуска ускорителя РКН в посадочную зону по патенту RU №2043954, B64G 1/24 по заявке №5035363/23 от 01.04.1992 г., где ОЧ после отделения стабилизируют ОЧ двигателем вперед, осуществляют управление с помощью аэродинамических рулей в каналах тангажа и рыскания, устанавливают радиолокатор на борту ОЧ, радиомаяк в точке падения и т.д.
Использование такого технического решения сопряжено с техническими и эксплуатационными проблемами, которые, в конечном итоге, делают этот подход экономически затратным и нецелесообразным, по крайней мере, на современном уровне развития ракетно-космической техники.
Наиболее близким к предлагаемому техническому решению является способ возвращения на космодром многоразовой первой ступени ракеты по патенту RU №2309089, B64G 1/14 по заявке №2006110150/11 от 29.03.2006 г., где спуск ОЧ ступени РКН в район космодрома осуществляется за счет многократного включения маршевых и рулевых двигателей ОЧ первой ступени КРН.
Использование этого технического решения связано со значительными затратами жидких компонентов ракетного топлива (КРТ), проблемами многократного запуска маршевого ЖРД и т.д.
Целью предлагаемого изобретения является уменьшение воздействия РКН на экологическое состояние района эксплуатации путем повышения эффективности управления спуском ОЧ в заданный район ее падения и полной выработки остатков КРТ.
Поставленная цель изобретения достигается тем, что в известном способе спуска ОЧ, основанном на развороте ОЧ в статически устойчивое положение после ее отделения от РКН, приложении импульса к ОЧ, аэродинамическом торможении при спуске, добавляют следующие действия, а именно:
1.1. Программу углового движения (угла тангажа, рыскания) ОЧ на участке спуска после ее разворота на направления приложения импульса разделяют на участки внеатмосферного и атмосферного полета, движение на внеатмосферном участке траектории полета разбивают на конечное число Sвн интервалов времени, и программу углового разворота ОЧ на каждом i-м интервале времени (i=1, 2…Sвн) определяют из условия максимального изменения приращения дальности точки падения ОЧ в пассивном полете от конца i-го текущего интервала времени по формуле:
где

ΔVi - импульс скорости, приложенный под углом ϑi на i-ом интервале времени 4 рулевыми камерами газового ракетного двигателя (ГРД), y0, Vx0, Vy0, g0 - значения координаты, скоростей центра масс ОЧ и ускорения поля тяготения Земли на начало i-го интервала времени.
1.2. Движение на атмосферном участке траектории полета разбивают на конечное Sат число интервалов времени, и программу углового разворота ОЧ на каждом j-ом интервале времени (j=1, 2…Sат) определяют из условия создания аэродинамического момента, не превышающего, например, управляющий момент рулевых камер ГРД, условий прочности и т.д., и обеспечивающего максимальное изменение приращения дальности точки падения ОЧ в пассивном полете от конца текущего j-го интервала времени до точки падения ОЧ, которое определяют по формуле:

где yjк, Vxj, Vyjк, gjк - значения координаты скоростей центра масс ОЧ и ускорения поля тяготения Земли на конец j-го интервала времени.
1.3. Суммарную длину участков управления и соотношение их длительностей:
τI - длительность участков управления;  - невыработанные остатки жидкого топлива в баках ОЧ, которые газифицируются и подаются в ГРД, каждая камера которого установлена в управляемый привод;
- невыработанные остатки жидкого топлива в баках ОЧ, которые газифицируются и подаются в ГРД, каждая камера которого установлена в управляемый привод;  - массовый секундный расход газифицированного топлива через ГРД определяют из условия достижения максимальной дальности точки падения ОЧ.
- массовый секундный расход газифицированного топлива через ГРД определяют из условия достижения максимальной дальности точки падения ОЧ.
2. Сущность предлагаемых действий способа поясняется следующими материалами.
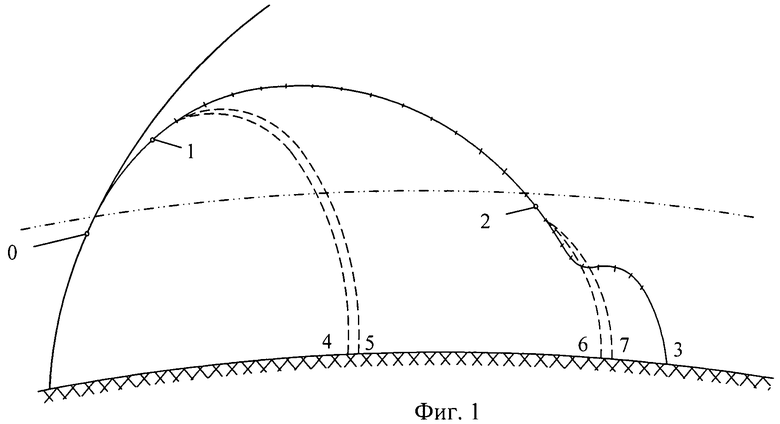
2.1. Разделение траектории полета ОЧ на участки управления приведено на фиг.1:
- Разворот ОЧ на направление разгона (поз.0-1),
- внеатмосферного (поз.1-2),
- атмосферного (поз.2-3).
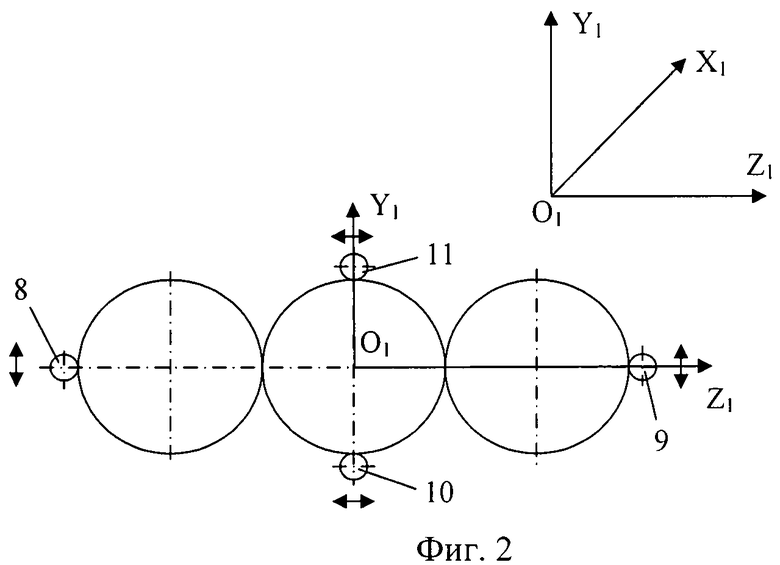
На фиг.2 приведено размещение камер ГРД для отработки управляющих воздействий, каждая из которых установлена в управляемый одностепенной привод.
Для создания управляющих воздействий в канале тангажа (Mz1) камеры 8, 9 отклоняются в плоскостях, параллельных плоскости Y1O1X1.
Для создания управляющих воздействий в канале рыскания (My1) камеры 10, 11, отклоняются в плоскостях, параллельных плоскости X1O1Z1.
Для создания управляющих воздействий в канале крена (Mx1) используются все камеры 8-11.
Величина δL(1) для оценки величины приращения дальности полета (поз. 4, 5 на фиг.1) ОЧ от точки с координатами x0, y0, Vx0, Vy0 на участке разгона (поз. 1-2 на фиг.1) получена на основе аналитического решения системы уравнений, описывающего пассивный полет ОЧ при допущениях: g=g0=const (Земля плоская), атмосфера отсутствует (см. кн.1 Ю.Г.Сихарулидзе. Баллистика летательных аппаратов. М.: Наука, 1982, стр.69).
В соответствии с действиями предлагаемого способа осуществляется разделение траектории участка (поз. 1-2 на фиг.1) на Sвн интервалов времени Δτi. На каждом интервале времени Δτi с помощью ГРД прилагается импульс ΔVi.
С начальными условиями:


определяется дальность в пассивном полете ОЧ и, соответственно, приращение дальности (2), полученное за счет придания импульса ΔVi с ориентацией ϑi. Решая численно тригонометрическое уравнение (1), определяется оптимальное значение ϑiopt. Далее осуществляется переход к следующему интервалу времени Δτ2, и процедура определения ϑiopt повторяется до окончания участка разгона. Уравнение (1) в раскрытом виде из-за его громоздкости не приводится.
Условие максимума приращения дальности точки падения ОЧ используется при оценке возможности максимального смещения дальности точки падения ОЧ при полной выработке топлива (5).
2.2. Определение углового движения на атмосферном участке полета определяют по принципу, аналогичному определению углового движения на внеатмосферном участке со следующими отличиями:
- определение угловой ориентации ОЧ на каждом интервале времени Δτj на атмосферном участке полета ОЧ осуществляют в соответствии с формулой:
где α - значение оптимального угла атаки (скольжения), которое варьируется при определении ориентации ОЧ (6), например, последовательным перебором в интервале:

при этом должно удовлетворяться условие на всем интервале Δτj по прочности, тепловому нагружению, управляемости ОЧ:

- начало атмосферного участка управления (поз.2 на фиг.1) выбирают из условия максимального приращения дальности за счет аэродинамического маневра;
- с выбранным текущим значением угла атаки из (7) и тангажа (6) интегрируют полное уравнение движения ОЧ (кн.1, стр.100) на интервале времени Δτj;
- после окончания интегрирования при значениях координат и скоростей в момент окончания интервала Δτj с различными углами атаки осуществляют оценку изменения приращения дальности на основе аналитического решения (3).
Использование этого решения для проведения сравнительных оценок различных управлений на малых интервалах времени Δτj (до 10 сек) вполне приемлемо (поз.6, 7 на фиг.1).
2.3. Определение длительностей участков (4) и оптимального их соотношения осуществляют на основе итерационной процедуры при определении программ тангажа (рыскания) при оптимизации критериев, например, приращения дальности простым перебором значений ζ, например, в диапазоне: 0,1<ζ<1.
Условие (4) соответствует полной выработке остатков жидких КРТ, запасы которых могут достигать до 3% от начальных объемов заправок топлива ОЧ, и является одним из основных экологических требований к программе управления спуском ОЧ в район падения.
Реализация процесса выработки жидких остатков КРТ обеспечивается за счет их газификации с последующей отработкой импульса с помощью ГРД, что достаточно полно описано в литературе, например:
- Способ очистки отделяющейся части ракеты от жидких токсичных остатков компонентов ракетного топлива и устройство для его осуществления / патент RU №2359876. Опубл. 27.06.2009. Бюл. №18,
- Способ увода отделившейся части ракеты-носителя с орбиты полезной нагрузки и двигательная установка для его осуществления / патент RU №2406856. Опубл. 20.12.2010. Бюл. №35.
Дополнительными преимуществами предлагаемого способа управления спуском являются:
- возможность изменения координат точки падения ОЧ за счет использования энергетики, заключенной в невыработанных остатках жидкого топлива в баках;
- снижение разбросов точек падения ОЧ за счет управляемого спуска ОЧ ступени РКН даже в плотных слоях атмосферы;
- полная выработка жидких остатков КРТ в топливных баках ОЧ к моменту подлета в район падения.
Масса элементов конструкции, обеспечивающая реализацию данного способа, не превышает 0,5% массы сухой конструкции ОЧ.
На фиг.1, 2 приведены схемы, поясняющие действия способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2581894C1 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2506206C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТАМИ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 2010 |
|
RU2456217C2 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ | 2016 |
|
RU2643073C1 |
| Способ спуска отделяющейся части ступени ракеты космического назначения и устройство для его осуществления | 2015 |
|
RU2621771C2 |
| СПОСОБ УВОДА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ С ОРБИТЫ ПОЛЕЗНОЙ НАГРУЗКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2482034C1 |
| СПОСОБ ГАЗИФИКАЦИИ ЖИДКОГО РАКЕТНОГО ТОПЛИВА В БАКЕ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2522536C1 |
| СПОСОБ УВОДА ОТДЕЛИВШЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ С ОРБИТЫ ПОЛЕЗНОЙ НАГРУЗКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518918C2 |
| СПОСОБ УВОДА КОСМИЧЕСКОГО МУСОРА С ОРБИТ ПОЛЕЗНЫХ НАГРУЗОК НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ОТДЕЛИВШЕЙСЯ ЧАСТИ РАКЕТЫ-НОСИТЕЛЯ, РАЗГОННОГО БЛОКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2462399C2 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ С МАРШЕВЫМ ЖРД | 2014 |
|
RU2562826C1 |
Изобретение относится к ракетно-космической технике и может быть использовано для программного смещения координат точек падения отделяющихся частей (ОЧ) ступеней ракет космического назначения. Программу управления работой газовых ракетных двигателей и движением ОЧ ступеней ракет космического назначения разделяют на внеатмосферный и атмосферный участки. Участки разбивают на конечное число интервалов времени и определяют программу углового разворота и движения ОЧ на каждом интервале. Изобретение обеспечивает полную выработку жидких остатков компонентов ракетного топлива в топливных баках ОЧ, изменение и снижение точек падения ОЧ. 1 з.п. ф-лы, 2 ил.
1. Способ спуска отделяющейся части ступени ракеты космического назначения с жидкостным ракетным двигателем, основанный на развороте отделяющейся части после ее отделения от ракеты космического назначения в статически устойчивое положение, приложении импульса, использовании аэродинамического качества при спуске, отличающийся тем, что программу управления движением отделяющейся части ступени на участке спуска разделяют на внеатмосферный и атмосферный полет, движение на внеатмосферном участке траектории полета разбивают на конечное число Sвн интервалов времени и программу углового разворота отделяющейся части на каждом i-м интервале времени (i=1, 2…Sвн) определяют из условия максимального изменения приращения дальности точки падения отделяющейся части в пассивном полете от конца i-го текущего интервала времени по формуле:
где

ΔVi - импульс скорости, приложенный под углом ϑi, на i-м интервале времени 4 рулевыми камерами газового ракетного двигателя, y0, Vx0, Vy0, g0 - значения координаты, скоростей центра масс отделяющейся части и ускорения поля тяготения Земли на начало i-го интервала времени, движение отделяющейся части на атмосферном участке траектории полета разбивают на конечное Sат число интервалов времени и программу углового движения отделяющейся части на каждом j-м интервале времени (j=1, 2…Sат) определяют из условия создания аэродинамического момента, не превышающего, например, управляющего момента рулевых камер газового ракетного двигателя, условий прочности и обеспечивающей максимальное изменения приращения дальности точки падения отделяющейся части в пассивном полете от конца текущего j-го интервала времени до точки падения отделяющейся части, которое определяют по формуле:

где yjк, Vxj, Vyjк, gjк - значения координаты, скоростей центра масс отделяющейся части и ускорения поля тяготения Земли на конец j-го интервала времени.
2. Способ по п.1, отличающийся тем, что суммарную длину участков управления, на которых работает газовый ракетный двигатель, и их соотношение определяют по формуле:

где τi - длительность участков управления;  - невыработанные остатки жидкого топлива в баках отделяющейся части, которые газифицируются и подаются в камеры газового ракетного двигателя, каждая камера которого установлена в управляемый привод;
- невыработанные остатки жидкого топлива в баках отделяющейся части, которые газифицируются и подаются в камеры газового ракетного двигателя, каждая камера которого установлена в управляемый привод;  - массовый секундный расход газифицированного топлива через камеры газового ракетного двигателя, определяют из условия достижения максимальной дальности точки падения отделяющейся части.
- массовый секундный расход газифицированного топлива через камеры газового ракетного двигателя, определяют из условия достижения максимальной дальности точки падения отделяющейся части.
| СПОСОБ ВОЗВРАЩЕНИЯ НА КОСМОДРОМ МНОГОРАЗОВОЙ ПЕРВОЙ СТУПЕНИ РАКЕТЫ | 2006 |
|
RU2309089C1 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2414391C1 |
| RU 2010113169 A, 10.10.2011 | |||
| СПОСОБ СПУСКА УСКОРИТЕЛЯ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ В ПОСАДОЧНУЮ ЗОНУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2043954C1 |
| US 6193187 B1, 27.02.2001 | |||
| Арочный мост | 1982 |
|
SU1043227A1 |

