Изобретения относятся к области космической техники и могут быть использованы для очистки околоземного космического пространства (ОКП) от прекративших активное существование космических аппаратов (КА), их обломков, отделившихся частей (ОЧ) последних ступеней ракет-носителей (РН) и разгонных блоков (РБ) и т.д.
В соответствии с Национальным стандартом Российской Федерации ГОСТ 52925-2008 «Изделия космической техники. Общие требования к космическим средствам по ограничению засорения околоземного космического пространства» под космическим мусором (КМ) подразумеваются все космические объекты, которые завершили свое целевое функционирование, в том числе ОЧ ступеней РН, РБ и т.д.
1. Известны способы очистки ОКП, например, «Способ очистки геостационарной орбиты» по заявке №93049870/11 от 11.10.1993, опубл. 27.09.1995, предусматривающий развертывание орбитальных космических станций, эластичных сетей, соединенных с орбитальной космической станцией посредством тросов. Развертывание сети осуществляется с помощью телеуправляемых космических буксиров с реактивной тягой. После осуществления захвата и причаливания неуправляемого космического объекта, многократного повторения процесса захвата различных космических объектов формируется сцепка из нескольких захваченных неуправляемых космических объектов, к которой присоединяется космический буксир с большой реактивной тягой и управляемый солнечный парус и т.д.
Реализация предлагаемого способа связана с разработкой специальных орбитальных космических станций, эластичных сетей, разных типов космических буксиров, управляемого солнечного паруса, со сложнейшими операциям на орбите по формированию сцепки космических объектов и т.д.
Наиболее близким по технической сущности к предлагаемым изобретениям являются «Способ увода отделившейся части ракеты-носителя с орбиты полезной нагрузки и двигательная установка для его осуществления» по заявке №2008114727/06, 11.06.2008. Дата публикации заявки: 20.12.2009, Бюл. №35, а также описанные технические решения в журнале «Космонавтика и ракетостроение» за 2009, №4 (57), стр.122-128 «Разработка активной бортовой системы увода средств выведения с орбит» авторов Куденцова В.Ю., Трушлякова В.И. и др.
В соответствии с ГОСТ 52925-2008 этот способ можно формулировать как «Способ увода космического мусора с орбиты полезной нагрузки».
Предлагаемый в качестве прототипа способ увода ОЧ ступени РН (он же и способ увода КМ) основан на использовании энергетики, заключенной в невыработанных остатках жидкого топлива ОЧ последних ступеней РН и РБ и включает в себя:
- предварительный расчет величины тормозного импульса, необходимого для увода с исходной орбиты полезной нагрузки на заданную орбиту утилизации по известной формуле;
- подбор конструктивных параметров газового ракетного двигателя (ГРД), обеспечивающих получение рассчитанной величины тормозного импульса для увода ОЧ ступени на орбиту утилизации т.д.
Использование этого способа для очистки ОКП от КМ, который уже находится на орбите, затруднено по ряду причин, связанных с решением ряда основных проблем:
- необходимость этапа дальнего наведения ОЧ ступени РН, РБ с КМ, что предполагает отработку нескольких импульсов, навигацию и т.д.;
- для мягкой стыковки ОЧ ступени РН, РБ с КМ необходима специальная координатная двигательная установка, обеспечивающая на этапе ближнего наведения выбор промаха (ошибок) дальнего наведения; оснащение такой двигательной установкой ОЧ с целью многократного и оперативного запуска маршевого двигателя практически невозможно из-за огромного объема доработок ОЧ;
- проблема буксировки выбранного КМ, которая в прототипе не рассматривается.
Целью предлагаемого изобретения (способа) является увод КМ с орбит полезных нагрузок, как выводимого в текущем пуске (ОЧ ступеней РН, РБ), так и КМ, уже находящегося на орбитах с близкими параметрами1 (1 Под близкими орбитами понимаются орбиты, переход между которыми, с обеспечением мягкой стыковки (нулевые скорости сближения), возможен в рамках располагаемой энергетики, имеющейся на борту ОЧ и космического буксира. Параметры орбиты КМ, который планируется для увода с использованием данного способа, выбираются из условия минимизации энергетических затрат и, как правило, являются компланарными.).
Поставленная цель достигается следующим образом: в известный способ увода ОЧ ступени РН, РБ с орбит полезных нагрузок, по которому после разрыва механической связи ОЧ ступени РН с полезной нагрузкой, на основе предварительно рассчитанных величин импульсов маневров, необходимых для увода ОЧ ступени РН, РБ, осуществляют подбор конструктивных параметров ракетного двигателя, обеспечивающих получение расчетных величин импульсов для увода ОЧ ступени РН, РБ на орбиту утилизации за счет реализации энергетики, заключенной в жидких остатках невыработанных компонентов ракетного топлива в баках окислителя и горючего, и приложении импульсов к ОЧ ступени РН, РБ добавляют следующие действия:
- перед уводом ОЧ ступени РН, РБ на орбиту утилизации осуществляют дальнее наведение ОЧ ступени РН, РБ в район встречи с выбранным для увода с орбиты КМ, а этап ближнего наведения ОЧ ступени РН, РБ с выбранным КМ осуществляют с помощью отделяемого от ОЧ ступени РН, РБ малоразмерного космического буксира (МКБ), связанного механической связью с ОЧ ступени РН, РБ тросом, осуществляют стыковку МКБ с КМ, после прилагают тормозной импульс к ОЧ ступени РН, РБ для увода связки «ОЧ ступени РН, РБ-трос-МКБ-КМ» на орбиту утилизации;
- запасы остатков жидких невыработанных компонентов ракетного топлива в баках окислителя и горючего в ОЧ ступени РН, РБ определяют исходя из затрат на маневр дальнего наведения и транспортировки связки «ОЧ ступени РН, РБ-трос-МКБ-КМ» на орбиту утилизации;
- при разматывании троса обеспечивают линейную скорость его схода с барабана на 2-3% больше относительной скорости сближения МКБ и КМ, при торможении МКБ перед стыковкой с КМ, скорость разматывания троса снижают в соответствии со снижением относительной скорости, а перед приложением тормозного импульса для перевода связки «ОЧ ступени РН-трос-МКБ-КМ» на орбиту утилизации, осуществляют выбор провисания троса, после чего прилагают тормозной импульс к ОЧ ступени РН, РБ для увода связки «ОЧ ступени РН, РБ-трос-МКБ-КМ» на орбиту утилизации.
Реализация действий способа поясняется следующими дополнительными сведениями:
1. Величины импульсов маневров, необходимых для этапа дальнего наведения ОЧ и увода на орбиту утилизации связки «ОЧ-трос-МКБ-КМ» на орбиту утилизации, рассчитывают в соответствии с известными формулами, приведенными, например (см. кн. 1. Инженерный справочник по космической технике. Изд. 2-е, пераб. и доп. под. ред. А.В.Солодова. М.: Воениздат, 1977, на стр.106-109).
Параметры орбиты заранее выбранного КМ определяются существующими системами целеуказания и наведения Центра контроля космического пространства, а собственные параметры орбиты ОЧ на момент начала каждого маневра определяются, например, на основе навигационной аппаратуры ГЛОНАСС, установленной на ОЧ в составе системы управления РН или рассчитываются в центре управления на Земле и передаются на борт ОЧ ступени РН, РБ.
Общий вид связки «ОЧ + АБСУ + тросовая система + МКБ» в отсеке полезной нагрузки последней ступени РН (выводимый КА уже отделился) далее будем обозначать как блок А, приведен на фиг.1, где поз.1 - ОЧ, 2 - ГРД активной бортовой системы увода (АБСУ), установленные в одностепенные управляемые приводы, 3 - тросовая система с управляемым приводом, 4 - МКБ.
На фиг.2 приведен этап развертывания троса 5 с помощью управляемого привода барабана тросовой системы 3 и МКБ 4.
На фиг.3 приведена схема этапа дальнего наведения. В начальный момент времени блок А (поз.9) находится на круговой орбите 10, на которую вывели полезную нагрузку, КМ 11 находится на круговой орбите 12. На этапе дальнего наведения прикладывается импульс ΔV1, переводящий блок А на эллиптическую орбиту, которая своим апогеем касается орбиты КМ в точке 13, для выхода блока А на орбиту КМ прилагается второй импульс ΔV2 (Хомановские маневры). В этот момент времени КМ находится на угловом расстоянии Δφ 14 от блока А. В том случае, если угол Δφ мал и расстояние между блоком А и КМ соответствует длине троса, а относительные скорости малы (не превышают 10÷15% от запаса характеристической скорости на борту МКБ), то начинается этап ближнего наведения.
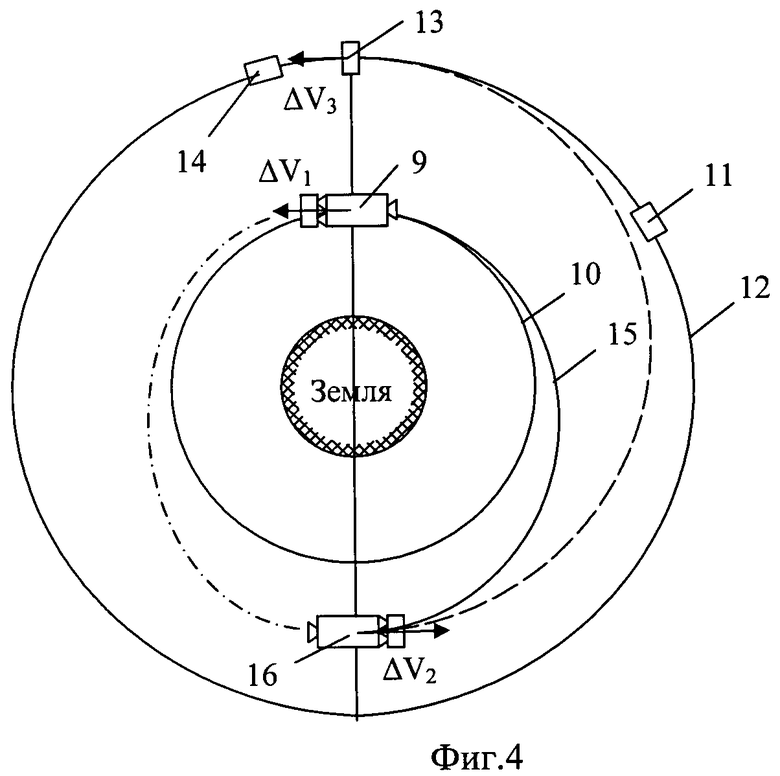
В том случае, если взаимное положение КА и блока А не позволяет реализовать двухимпульсную схему сближения, то вводится орбита фазирования 15 (фиг.4) с соответствующим дополнительным импульсом ΔV1 (фиг.4), переводящим блок А на эту орбиту (кн.2 В.К.Сердюк «Проектирование средств выведения КА» М.: Машиностроение, 2009, стр.383).
Время нахождения блока А на орбите фазирования определяется взаимным начальным положением КМ и блока А. Импульс ΔV2 (поз.16) переводит блок А на эллиптическую переходную орбиту, которая апогеем касается орбиты КМ 13 фиг.4. Импульс ΔV3 переводит блок А на орбиту в окрестность КМ 12 для начала этапа ближнего наведения.
Интервал времени от момента приложения импульса ΔV1 до приложения импульса выведения блока А ΔV2 (ΔV3) на орбиту КМ называется интервалом времени этапа дальнего наведения Тдн.
Переход ОЧ ступени РН, РБ к КМ за счет малых величин импульсов скорости возможен только за счет использования накопленной кинетической и потенциальной энергии на участке выведения КА.
2. При разматывании троса с барабана, с управляемым приводом, установленным на ОЧ ступени РН, РБ во избежание рывков со стороны МКБ и образования петель из-за разбросов параметров функционирования тросовой системы, МКБ обеспечивают линейную скорость его схода с барабана на 2÷3% больше относительной скорости сближения МКБ и КМ, при торможении МКБ перед стыковкой с заранее выбранным КМ, скорость разматывания троса снижают в соответствии со снижением относительной скорости сближения, а перед приложением тормозного импульса к ОЧ ступени РН, РБ для перевода связки «ОЧ-трос-МКБ-КМ» на орбиту утилизации, осуществляют выбор провисания троса управляемым приводом барабана.
На настоящий момент проведены эксперименты по развертыванию троса в космическом пространстве на расстояние до 30 км за интервал времени, составляющий менее половины периода оборота по орбите.
На фиг.2 приведен момент приближения МКБ 4 с тросом 5 к КМ 6, другой конец которого закреплен с ОЧ ступени РН, РБ (поз.1).
3. Приложение импульса к ОЧ ступени РН, РБ для увода связки «ОЧ-трос-МКБ-КМ» на орбиту утилизации осуществляется при малых перегрузках, при этом возможны динамические процессы в системе «ОЧ-трос-МКБ-КМ», связанные с продольными колебаниями троса, поэтому перед этим осуществляют выбор провисания троса и его натяжение с помощью управляемого привода барабана до величины натяжения, определяемого появлением начальной относительной скорости между ОЧ ступени РН, РБ и КМ, после чего запускают двигательную установку ОЧ ступени РН, РБ, при этом величину натяжения троса, обусловленную работой двигательной установки ОЧ ступени РН, РБ, изменяют плавно. Прочности троса, изготовленного, например, из кевлара, достаточно для транспортировки КМ на орбиту утилизации при малых перегрузках (порядка 0,005-0,01).
Все приведенные выше действия способа на настоящий момент времени технически реализованы в различных космических программах и исследовательских пусках РН как в РФ, так и в ряде зарубежных стран, занимающихся ракетно-космической деятельностью.
Основным достоинством предлагаемого способа является снижение затрат на очистку ОКП, в частности, защищаемых областей, куда осуществляется значительное количество запусков КА. Это снижение затрат достигается за счет технологии двойного использования пуска РН, а именно: целевое выведение КА на орбиту и попутный увод с орбиты не только ОЧ последней ступени РН, РБ, но и увод заранее выбранного КМ.
Для ОЧ ступени РН в качестве двигательной установки используется ГРД в составе АБСУ, а для РБ - многократная ЖРД, например, для РБ «Бриз-М», «Фрегат» и другие.
2. Устройство для реализации способа
Известны устройства для очистки ОКП, например, устройство для реализации способа по заявке «Способ очистки геостационарной орбиты» по заявке №93049870/11 от 11.10.1993, опубл. 27.09.1995, предусматривающие развертывание орбитальных космических станций, эластичных сетей, соединенных с орбитальной космической станцией посредством тросов. Развертывание сети осуществляется с помощью телеуправляемых космических буксиров с реактивной тягой. После осуществления захвата и причаливания неуправляемого космического объекта, многократного повторения процесса захвата различных космических объектов формируется сцепка из нескольких захваченных неуправляемых космических объектов, к которой присоединяется космический буксир с большой реактивной тягой и управляемый солнечный парус и т.д.
Реализация предлагаемого устройств связана с разработкой специальных орбитальных космических станций, эластичных сетей, разных типов космических буксиров, управляемого солнечного паруса, сложнейшими операциями на орбите по формированию сцепки космических объектов и т.д.
Наиболее близким по технической сущности является устройство по заявке «Способ увода отделившейся части ракеты-носителя с орбиты полезной нагрузки и двигательная установка для его осуществления» по заявке №2008114727/06, 11.06.2008. Дата публикации заявки: 20.12.2009, Бюл. №35.
Это устройство представляет собой ОЧ ступени РН с ЖРД установкой, включающей топливные баки окислителя и горючего, систему наддува баков, содержащую газогенератор, устройства ввода газа в баки, снабженные расходомерными шайбами, снабжено пороховыми ракетными двигателями раскрутки ОЧ, по меньшей мере одним ГРД с системой питания и системой газификации остатков компонентов ракетного топлива, причем система питания содержит устройства отбора газа, снабженные пиромембранами, которые подсоединены к коллектору ГРД, а система газификации остатков компонентов ракетного топлива содержит шар-баллон со сжатым газом, соединенный через электропневмоклапан и редуктор с вытеснительными емкостями с горючим и окислителем, газогенератор, снабженный расходомерными шайбами, питаемый от вытеснительных емкостей и соединенный с устройствами ввода газа в топливные баки, снабженными пиромембранами.
Использование этого устройства, предназначенного для увода с орбиты ОЧ ступени РН, РБ, которая после отделения КА также превращается в КМ, для реализации предлагаемого способа приводит к необходимости введения дополнительных систем для реализации этапов дальнего, ближнего наведения, стыковки к КМ. Транспортировки связки «МКБ - тросовая система - КМ» на орбиту утилизации практически не приводит к новым действиям.
Фактически, в способ и в устройство, взятые за прототип, вводятся дополнительные операции и элементы, а именно:
в способ - после отделения КА от ОЧ ступени РН, РБ до приложения импульса увода к ОЧ вводятся этапы дальнего и ближнего наведения на выбранную цель - КМ, стыковка с КМ;
в устройство - новые элементы: тросовая система, МКБ, устройство стыковки.
Поставленная цель в предлагаемом устройстве достигается тем, что в известное устройство, включающее в свой состав ОЧ ступени РН, РБ с двигательной установкой, вводят тросовую систему с управляемым приводом тросового барабана, жестко связанную с ОЧ, МКБ с аппаратурой обнаружения КМ и самонаведения, устройство стыковки, при этом МКБ связан с ОЧ ступени РН, РБ через тросовую систему, а параметры тросовой системы, МКБ определены из условий начального взаимного положения ОЧ и КМ на орбите, точностью отработки импульсов дальнего наведения с помощью двигательной установки ОЧ ступени РН, РБ:

где Тсближ - время этапа ближнего наведения МКБ на выбранный KM; Dmax, δVmax - начальные промахи по дальности и скорости, полученные на этапе дальнего наведения, соответственно; Lтроса - длина троса.
Реализация действий устройства поясняется следующими дополнительными сведениями.
Запас топлива и подбор конструктивных параметров двигательной установки МКБ осуществляют из условия выбора начального промаха, полученного на этапе дальнего наведения с учетом промаха по дальности Dmax и скорости δVmax, при этом длина троса Lтроса должна удовлетворять условию (1).
На фиг.2 приведена схема МКБ с камерами декартовой двигательной установки (ДДУ), установленными в управляемые двухстепенные приводы 7, головкой самонаведения 8, соединенной с тросом 5.
Величина характеристической скорости ΔVКБ и тяговооруженность МКБ nКБ определяются:
1. Величиной начального промаха (1), полученного на этапе дальнего наведения, который полностью определяется:
- параметрами двигательной установки ОЧ ступени РН, РБ (точностью отработки величин рассчитанных импульсов дальнего, наличия разброса импульса последействия двигательной установки);
- точностью работы системы управления (точностью ориентации импульса, времени его отработки);
- длительностью времени этапа дальнего наведения Тдн, т.к. ошибки по скорости отработки импульсов дальнего наведения будут приводить к пропорциональному увеличению Dmax, а Тдн определяется начальным взаимным положением КМ и ОЧ ступени РН, РБ (см. кн.1, стр.99-104).
2. Величиной интервала времени, отводимого на этап ближнего наведения Тсближ, который также является функцией (1). Например, в случае идеального исполнения этапа дальнего наведения, ближнего наведения при нулевых ошибках время (соответствует выходу на одинаковые орбиты) Тсближ может быть достаточно большим, однако, как правило, ошибки всегда присутствуют, поэтому Тсближ всегда ограничено и определяется в процессе моделирования относительного орбитального движения (см. кн.1, стр.110-113).
Затраты характеристической скорости определяются на борту МКБ:

где δVmax,  ,
,  соответственно, скорости максимального отклонения на начало этапа ближнего наведения, скорость разгона МКБ и торможения перед мягкой стыковкой.
соответственно, скорости максимального отклонения на начало этапа ближнего наведения, скорость разгона МКБ и торможения перед мягкой стыковкой.
Тяговооруженность МКБ определяется из баланса времен активного и пассивного полета на этапе ближнего наведения.
Расстояния, входящие в этап ближнего наведения, можно представить в виде:

S1, S2, S3 - расстояния, пролетаемые при разгоне, равномерном движении с набранной скоростью, торможении МКБ, с учетом ошибок по скорости.

где a1,2 - ускорения на участках разгона и торможения МКБ, развиваемое его ДДУ, τ1,2 - время работы ДДУ на этих участках; Тсв - время полета МКБ с набранной скоростью от конца участка разгона до начала участка торможения.
Начальная тяговооруженность МКБ nкб
где РДДУ - тяга одной камеры ДДУ; mo - начальная масса МКБ, будет определяться из условия удовлетворения временного баланса:
при удовлетворении условий (1).
С учетом формул (1) - (6) общая величина характеристической скорости на борту МКБ (формула 2) для Lтроса=30 км в импульсной постановке составит до 80 м/с. При реализации этой величины характеристической скорости ДДУ ограниченной тяги с поворотными камерами, с учетом запаса, необходимо ее увеличить до 100 м/сек.
Определение конкретных тяг (тяговооруженность) камер ДДУ связано с оценкой запасов топлива, массой конструкции МКБ и представляет собой традиционную задачу проектирования и приведено, например, в кн.2 на стр.211-214, 409-417.
Таким образом, параметры: Dmax, Lтроса, δVmax, Тдн, Тсближ являются функцией взаимного начального положения на орбите ОЧ ступени РН, РБ и КМ, от которого зависят параметры этапа дальнего наведения (длительность этапа Тдн, количество импульсов наведения ΔVi, где i=1…3), точности отработки импульсов наведения ΔVi (по величине δΔVi и направлению εi) с помощью двигательной установки для ОЧ - это ГРД, а для РБ - многократная ЖРД установка с выжимной системой подачи КРТ.
Устройство для варианта ОЧ последней ступени РН: связка «ОЧ + АБСУ + тросовая система + МКБ» в отсеке полезной нагрузки последней ступени РН (выводимый КА уже отделился) далее для краткости будем обозначать как блок А, приведено на фиг.1, где поз.1 - ОЧ, 2 - камеры ГРД АБСУ, установленные в одностепенные управляемые приводы, 3 - тросовая система с управляемым приводом, 4 - МКБ.
При выведении РН на орбиту КА блок А находится в нижней части отсека полезного груза, скомпонован таким образом, чтобы после окончания этапа дальнего наведения аппаратура самонаведения МКБ была ориентирована в расчетную зону появления КМ, а тросовая система находилась между ОЧ и МКБ.
Достоинство предлагаемого устройства заключается в том, что оно позволяет использовать накопленную кинетическую и потенциальную энергию ОЧ ступени РН, РБ за счет ее выведения на близкие орбиты к КМ при выведении полезных нагрузок для очистки ОКП от КМ.
Размещение на ОЧ ступени РН, РБ дополнительных элементов - МКБ и тросовой системы позволяет отказаться от маневрирования ОЧ при стыковке с КМ, а реализовать этот этап с помощью МКБ, связанного тросом с ОЧ, что повышает надежность этого этапа, снижает энергетические затраты. Практическая реализация устройства не вызывает каких-либо технических затруднений. Имеющийся научно-технический задел российских предприятий ракетно-космической отрасли позволяет это реализовать в реальные сроки (1,5-2 года от начала работ).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВЕДЕНИЯ ЛЁТНО-КОНСТРУКТОРСКИХ ИСПЫТАНИЙ АВТОНОМНОГО СТЫКОВОЧНОГО МОДУЛЯ ДЛЯ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2016 |
|
RU2643020C1 |
| СПОСОБ ОЧИСТКИ ОРБИТ ОТ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2531679C2 |
| Способ управления движением сложной формации группы космических аппаратов | 2017 |
|
RU2683700C1 |
| Способ очистки орбит от объектов космического мусора | 2018 |
|
RU2676368C1 |
| Способ увода объектов крупногабаритного космического мусора и устройство для его реализации | 2021 |
|
RU2775092C1 |
| Космический комплекс для утилизации группы объектов крупногабаритного космического мусора | 2018 |
|
RU2695155C1 |
| СПОСОБ СТЫКОВКИ КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2521082C2 |
| СПОСОБ ПОДДЕРЖАНИЯ СОСТАВА ОРБИТАЛЬНОЙ ГРУППИРОВКИ АВТОМАТИЧЕСКИХ КОСМИЧЕСКИХ АППАРАТОВ | 2017 |
|
RU2666014C1 |
| Способ ограничения засорения эксплуатируемых областей околоземного космического пространства | 2017 |
|
RU2665156C1 |
| РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС И СПОСОБ ФУНКЦИОНИРОВАНИЯ РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА | 2016 |
|
RU2643744C2 |
Изобретение относится к области космической техники и может быть использовано для очистки околоземного космического пространства от прекративших активное существование космических аппаратов, их обломков, отделившихся частей (ОЧ) последних ступеней ракет-носителей (РН) и разгонных блоков (РБ). Способ увода космического мусора с орбит полезных нагрузок заключается в том, что с помощью отделяемого от ОЧ РН или РБ малоразмерного космического буксира (МКБ), связанного механической связью с ОЧ РН или РБ тросом, осуществляют стыковку МКБ с космическим мусором, после чего прилагают тормозной импульс к ОЧ ступени РН или РБ на основе использования невыработанных запасов жидкого топлива для увода связки «ОЧ ступени РН, РБ - трос - МКБ - космический мусор» на орбиту утилизации. Устройство для увода космического мусора содержит ОЧ ступени РН, РБ с ракетной двигательной установкой, тросовую систему с управляемым приводом тросового барабана, жестко связанную с ОЧ ступени РН или РБ, МКБ с аппаратурой обнаружения космического мусора и самонаведения, устройство стыковки. Достигается возможность увода космического мусора, находящегося на орбитах с близкими параметрами, к орбитам ОЧ РН, РБ. 2 н. и 2 з.п. ф-лы, 4 ил.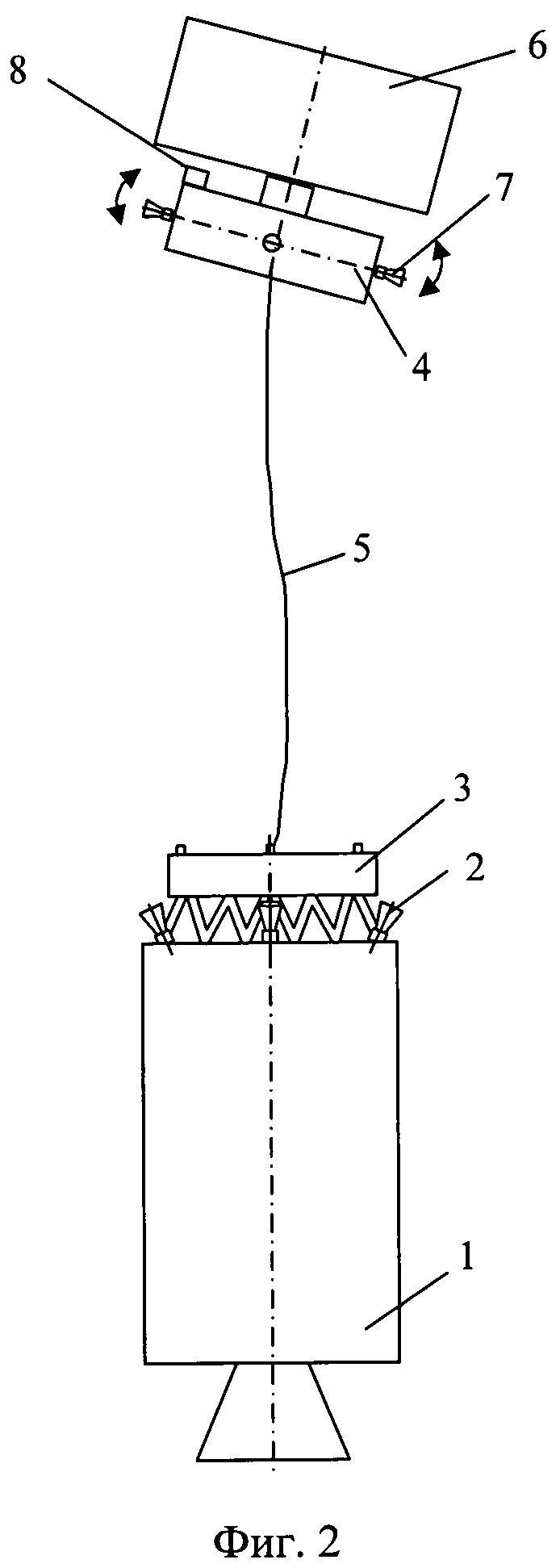
1. Способ увода космического мусора (КМ) с орбит полезных нагрузок на основе приложения импульса маневра к отделяющейся части (ОЧ) ступени ракеты-носителя (РН), разгонного блока (РБ) для увода на орбиту утилизации на основе использования невыработанных запасов жидкого топлива после разрыва механической связи с полезной нагрузкой, отличающийся тем, что перед уводом ОЧ ступени РН, РБ на орбиту утилизации осуществляют дальнее наведение ОЧ ступени РН, РБ в район встречи с выбранным для увода с орбиты КМ, а этап ближнего наведения ОЧ ступени РН, РБ с выбранным КМ осуществляют с помощью отделяемого от ОЧ ступени РН, РБ малоразмерного космического буксира (МКБ), связанного механической связью с ОЧ ступени РН, РБ тросом, осуществляют стыковку МКБ с КМ, после прилагают тормозной импульс к ОЧ ступени РН, РБ для увода связки «ОЧ ступени РН, РБ - трос - МКБ - КМ» на орбиту утилизации.
2. Способ по п.1, отличающийся тем, что запасы остатков жидких невыработанных компонентов ракетного топлива в баках окислителя и горючего в ОЧ ступени РН, РБ определяют исходя из затрат на маневр дальнего наведения и транспортировки связки «ОЧ ступени РН, РБ - трос - МКБ - КМ» на орбиту утилизации.
3. Способ по п.1, отличающийся тем, что при разматывании троса обеспечивают линейную скорость его схода с барабана на 2-3% больше относительной скорости сближения МКБ и КМ, при торможении МКБ перед стыковкой с КМ, скорость разматывания троса снижают в соответствии со снижением относительной скорости, а перед приложением тормозного импульса для перевода связки «ОЧ ступени РН - трос - МКБ - КМ» на орбиту утилизации осуществляют выбор провисания троса.
4. Устройство для реализации способа по п.1, включающее в свой состав ОЧ ступени РН, РБ с ракетной двигательной установкой, отличающееся тем, что в его состав вводят тросовую систему с управляемым приводом тросового барабана, жестко связанную с ОЧ ступени РН, РБ, МКБ с аппаратурой обнаружения КМ и самонаведения, устройство стыковки, при этом МКБ связан с ОЧ ступени РН, РБ через тросовую систему, а параметры тросовой системы, МКБ определены из условий начального взаимного положения ОЧ ступени РН, РБ и КМ на орбите, точности отработки импульсов дальнего наведения с помощью двигательной установки ОЧ ступени РН, РБ:
Dmax+δVmax·Тсближ≤Lтроса,
где Тсближ - время этапа ближнего наведения МКБ на выбранный КМ;
Dmax, δVmax - начальные промахи по дальности и скорости, полученные на этапе дальнего наведения, соответственно;
Lтроса - длина троса.
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ ПАССИВНЫХ КА И ИХ ФРАГМЕНТОВ | 1998 |
|
RU2141436C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМИЧЕСКОГО ПРОСТРАНСТВА ОТ МУСОРА | 1993 |
|
RU2092408C1 |
| US 20050151022 А1, 14.17.2005 | |||
| АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ МУСОРА | 1992 |
|
RU2040449C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ МУСОРА | 1992 |
|
RU2040448C1 |

