Изобретение относится к аналогово-цифровым управляющим устройствам и может быть использовано при создании сложных многопараметрических систем автоматического управления различными объектами и технологическими процессами, позволяющих объекту изменять свою реакцию в зависимости от изменения характера внешних влияющих факторов, в системах распознавания образов, в робототехнике, а также для моделирования мозга человека.
Согласно общей теории систем управляющее устройство систематически или по мере необходимости вырабатывает управляющие воздействия на некоторый процесс. Самоорганизующиеся управляющие устройства строятся на принципах оптимизации решения поставленных задач, для чего входная информация перерабатывается в соответствии с набором правил для того, чтобы получить на выходе управляющие сигналы, адекватно решающие поставленную задачу.
Лучшим примером самоорганизации является мозг человека. Для реализации устройств, функционирующих по аналогии с работой нейронных сетей, созданы многочисленные технические решения, преимущественно в области компьютерного конструирования.
Работа адаптивных систем организуется с помощью искусственной нейронной сети, в той или иной мере моделирующей нервную систему живых организмов и функционирующей на основе нейроподобных элементов. Устройства для моделирования нейронных сетей могут быть аналого-цифровыми, аппаратными или компьютерными. К первой группе относятся устройства, в которых модели отдельных нейронов и межнейронных связей реализуются в виде электронных элементов, использующих многоэлементную аналоговую или цифровую базу. Общими недостатками таких устройств являются их аппаратурная сложность и высокая стоимость, в результате чего невозможно создавать модели больших нейронных сетей, обладающих качествами многофункциональности, трудности при формировании и наращивании сложных нейронных структур. Ко второй группе можно отнести устройства, в которых модели нейронов или модели межнейронных связей выполнены различными приборами функциональной электроники, например оптоэлектронные модели. Общими недостатками этих моделей являются недостаточная гибкость, сложность перестройки структуры сети, сложность изменения функциональных характеристик нейронов и межнейронных связей. Другим недостатком, свойственным большинству таких устройств, является неудовлетворительное состояние технологии производства элементной базы. К третьей группе можно отнести универсальные и специализированные программируемые вычислительные устройства, которые используются для моделирования нейронных сетей. При этом достигается гибкость изменения межнейронных связей и характеристик нейронов, можно моделировать большие нейронные сети. Основными недостатками таких устройств являются громоздкость программного аппарата и низкое быстродействие.
Известно большое количество нейронных сетей различного типа (см. Artificial Neural Networks: Concepts and Theory, IEEE Computer Society Press, 1992; J.Anderson, An introduction to neural networks, Chapter 2, MIT, 1999), общим недостатком которых является сложность определения весов синаптических связей и их коррекции, способ задания которых либо грубо упрощает реальные процессы, либо настолько усложняет конструкцию, что ее реальная реализация становится вряд ли возможной.
Известен нейроподобный элемент, на основе которого можно построить устройство для решения класса задач оценки функционирования открытых сложных систем, оценки степени оптимальности различных решений (RU 2295769, опубл. 2007). Система имеет ограниченные функциональные возможности, в частности неспособна к самообучению.
Известен ряд технических устройств для управления сложными технологическими процессами (Нейронная сеть, RU 66831, 2007; Доменная нейронная сеть, RU 7208, 2008; Модульная вычислительная система, RU 75247, 2008; Ассоциативная память, RU 77483, 2008 и др.), общими недостатками которых являются ограниченные функциональные возможности и неспособность к самообучению, поскольку коммутация межнейронных связей и передача информации между нейронами осуществляется на основе детерминированных таблиц связей, а для ряда устройств необходимо использовать внешнюю память.
Известны динамические синапсы для обработки сигнала в нейронных сетях. Система содержит множество взаимосвязанных базовых нейронов и предназначена для обработки сигналов, поступающих в виде последовательности импульсов. Сущностью устройства является установление обратной связи между предсинаптическим и постсинаптическим нейронами и использование тормозящих нейронов, что непрерывно изменяет процедуру обработки сигнала синапсом, так что при вторичном предъявлении одного и того же сигнала синапс учитывает предсинаптическую картину и дает иную картину на выходе. Динамическое изменение проводящей структуры сети с обратными связями дает увеличение вычислительной мощности сети на нейронном уровне и увеличение способности сети к динамическому обучению (US 6643627, 2003).
В известном устройстве коррекцию информационного сигнала осуществляют на локальном уровне предсинапс - постсинапс, что эффективно только для сетей малого объема. При увеличении числа слоев до 4 и более полезные свойства динамического синапса резко уменьшаются (см. фиг.6а описания патента). Класс решаемых подобной системой задач ограничен, наилучшие результаты получены для задач фильтрации шумов в многопараметрических сигналах и анализа речи, например, при распознании одинаковых слов, произнесенных различными людьми с различными акцентами.
Известна нанотехнологичная нейронная сеть и способ организации ее работы, во многих аспектах моделирующая биологический мозг и протекающие в нем процессы взаимодействия нейронов (US 7426501. Nanotechnology neural network methods and systems, 2008 г.). Устройство содержит множество искусственных нейронов с наноотростками, взвешенных и способных к перемещению в специальной среде (диэлектрическом растворе). Соседние адаптивные синаптические элементы разделены промежутками, поперек которых может быть приложено электрическое поле, под действием которого устанавливаются электрические связи. Связи способны усиливаться, ослабляться и даже растворяться в диэлектрическом растворе для забывания неправильных реакций на входные сигналы, что обеспечивает быстрое обучение нейронной сети. Для этого промежуток между соседними нейронами может быть оборудован соответствующей логикой.
Известное устройство решает ряд тех же проблем, что и заявляемое техническое решение, но другими способами, сложными для физической реализации и практического использования.
Известна техническая нервная система RU 2128857, опубл. 1999. Устройство содержит технический мозг, распределитель выходных сигналов, регулятор мощности питания рецепторов, активное устройство обучения, рецепторы выходных сигналов технического мозга, рецепторы внешних систем, распределения питания и обучения. Нейронная сеть построена в виде матрицы регулируемых резисторных элементов. На каждом шаге обучения определяют ситуацию, в которой отношение отклонения сигнала управления к допустимому отклонению этого сигнала в данной ситуации было наибольшим, и проводят внешнюю корректировку проводимостей элементов матрицы технического мозга для этой ситуации. Система обладает ограниченными функциональными возможностями, сложна в изготовлении и содержит большое число внешних регуляторов для коррекции реакций, что ограничивает ее способность к адаптации.
Наиболее близким к заявленному техническому решению по назначению и существенным признакам является многослойное перцептронное устройство (US 5220641, Multi-layer perceptron circuit device, 1993). Устройство выбрано за прототип.
Архитектура адаптивной нейронной сети в виде многослойного персептрона, подобная изобретению US 5220641, используется наиболее часто. Обычно каждый нейрон строит взвешенную сумму своих входов с поправкой в виде слагаемого и затем пропускает эту величину активации через передаточную функцию, и таким образом устройство вырабатывает выходное значение сигнала. Обучение рекуррентной нейронной сети по сути дела заключается в исследовании поверхности ошибок и отыскании глобального минимума.
Устройство-прототип содержит множество нейроподобных базовых элементов, множество связей между которыми обеспечено особой топологий, при которой элементы сгруппированы в модульные блоки так, что выходы БЭ одного блока расположены ортогонально или под некоторым углом к входам БЭ другого блока, что позволяет установить между выходом одного нейроподобного элемента и входами множества других элементов синаптические связи. Каждый из синапсов получает сигналы от одной из линий входа сигналов, производит вычисление веса этого сигнала с предписанным значением и затем передает результат вычисления веса на одну из линий выхода сигнала. Заметим, поскольку в прототипе основным элементом является синапс, следует учитывать, что здесь и далее линия входа для синапса по прототипу является линией выхода нейроподобного элемента согласно традиционным представлениям, а линия выхода для синапса по прототипу является линией входа для традиционного нейрона и для заявленного нейроподобного элемента. Каждый синапс содержит блок подсчета веса. Самообучение построено на алгоритме обратного распространения ошибки. Такие же принципы заложены в многослойной нейронной сети на MOS-инверторах по US 5347613, опубл. 1994 г., в котором заявлен новый пятиэтапный способ обучения, но основан он на известных способах коррекции весов связей, а обучение является модификацией способа обучения по изобретению-прототипу.
Общими недостатками систем с самообучением путем варьирования, вычисления и коррекции весов связей являются неприемлемо большие времена обработки входной конфигурации сигналов для получения адекватных управляющих сигналов.
Согласно прототипу, чтобы обучить нейронную сеть решению какой-либо задачи, необходимо многократно подправлять веса каждого элемента таким образом, чтобы уменьшалась ошибка - расхождение между действительным и желаемым выходом. При этом время обучения растет значительно быстрее, чем размеры сети. Недостатками прототипа являются сложность устройства из-за наличия большого числа регулирующих элементов и его ограниченные функциональные возможности.
Для устранения недостатков в многофункциональном адаптивном управляющем устройстве целесообразно отказаться от коррекции весов связей, в том числе от алгоритма обратного распространения ошибки. В изобретении использован другой принцип: вместо бесконечной корректировки весов связей непрерывно прокладывают все новые и новые связи между нейронами, «забывая» старые и закрепляя те, которые учитывают предшествующие события и реализуют «правильные» реакции на изменяющуюся конфигурацию входных сигналов. Такой экстенсивный путь обучения более перспективен для адаптивных систем и более соответствует биологической природе интеллекта. По некоторым оценкам, человеческий мозг имеет потенциал в сотни терабайт, из которых задействовано около половины, а его информационное содержание изменяется в среднем в темпе сотен килобайт в секунду.
Согласно изобретению управляющее устройство можно осуществить с помощью простого узла - нейроподобного базового элемента, способного образовывать электрические связи со своими соседями и обладающего некоторыми элементарными свойствами биологического нейрона: способностью возбуждаться, уставать, восстанавливать работоспособность и подпитываться энергией для передачи сигнала без затухания. Для реализации такого устройства необходимо создать многослойную нейронную сеть с очень большим объемом памяти, что достигается специальной топологией нейронной сети, описанной ниже.
Здесь следует заметить, что корейская компания Samsung объявила о создании подложки для производства полупроводников, толщина которой составляет всего 0,08 мм. Это на 20% меньше, чем 0,1-миллиметровая подложка, которую Samsung выпускала ранее (http://habrahabr.ru/blogs/hardware/14025/). Емкость человеческого мозга порядка 400-500·1012 байт. Можно показать, что при уже освоенных технологиях микроэлектроники в таком же объеме, какой занимает человеческий мозг (приблизительно 1,5 дм3=1500 см3), в структурах заявленного устройства можно разместить не менее 5,5 терабайт информации, или около 1% емкости мозга.
Технической задачей изобретения является создание адаптивного управляющего устройства, сочетающего простоту конструкции с широкими функциональными возможностями, создание нейроподобного элемента (искусственного нейрона), на базе которого можно построить обучаемую нейронную сеть, создание способа организации работы адаптивного управляющего устройства с нейронной сетью.
Первая из поставленных задач решается тем, что в известном устройстве-прототипе, содержащем множество нейроподобных базовых элементов, каждый из которых имеет вход и выход, способен принимать и суммировать электрические сигналы от сенсоров или от других БЭ и переходить в возбужденное состояние с генерацией электрического сигнала, который может быть передан множеству других БЭ или исполнительному механизму, сгруппированных в М>1 плоских модульных блоков по N>1 БЭ в каждом так, что выходы БЭ одного блока расположены ортогонально или под некоторым углом к входам БЭ другого блока, образуя, по крайней мере, одну сетку с N узлами, используют новую конструкцию многослойной нейронной сети.
Для решения задачи выходы БЭ одного блока наложены на входы БЭ другого блока через диэлектрическую пленку с полупроводниковым слоем, каждый из упомянутых узлов сетки при создании разности потенциалов, достаточной для пробоя диэлектрика, имеет возможность образовать между выходом одного БЭ и входом другого ему подобного БЭ резистивную связь, проводимость которой уменьшается со временем, входы некоторых произвольных БЭ соединены с сенсорами и назначены для приема сигналов от внешних источников, выходы некоторых произвольных БЭ соединены с исполнительными механизмами управляющего устройства и назначены для выдачи управляющих сигналов, причем часть упомянутых резистивных связей проложена заранее при изготовлении управляющего устройства и при подаче сигнала образует, по крайней мере, одну электрическую цепь от входа, соединенного с сенсором, до выхода, соединенного с исполнительным механизмом.
Другой технической задачей является создание нейроподобного базового элемента, пригодного для создания самообучающихся нейронных сетей и физической реализации управляющих устройств разнообразного назначения.
Техническая задача решается следующим образом.
Как и известные аналоги, нейроподобный базовый элемент (БЭ) адаптивного управляющего устройства содержит многоточечный вход для приема и суммирования электрических сигналов от ему подобных базовых элементов (БЭ) или от внешних источников, рабочий выход и блок обработки сигналов, имеющий возможность генерировать электрические сигналы при возбуждении БЭ. В базовом элементе по изобретению блок обработки сигналов содержит формирователь порогового напряжения, соединенный с источником регулируемого опорного напряжения, компаратор и два формирователя нормированного напряжения (ФНН), первый из которых формирует положительные прямоугольные импульсы, второй формирует такие же по величине и продолжительности отрицательные прямоугольные импульсы, компаратор соединен с многоточечным входом БЭ и с выходом формирователя порогового напряжения, вход первого ФНН соединен с выходом компаратора, выход первого ФНН соединен с рабочим выходом БЭ и с входом формирователя порогового напряжения, вход второго ФНН соединен с выходом компаратора, выход второго ФНН соединен с многоточечным входом базового элемента.
Конструкция нейроподобного базового элемента является новой и составляет отдельное изобретение.
В одном из воплощений изобретения описанный нейроподобный базовый элемент сгруппирован с множеством таких же базовых элементов, выполненных на плоской подложке, образуя модульный блок базовых элементов, имеющий две односторонние или двусторонние контактные площадки с параллельными друг другу входами и выходами.
Третьей технической задачей является создание способа организации работы адаптивного управляющего устройства. На описанных ниже принципах может работать не только заявленное устройство, но и ряд других, в том числе компьютерные управляющие системы, а сам заявленный способ составляет самостоятельное изобретение.
Для решения поставленной задачи в известном способе организации работы управляющего устройства, включающем получение электрических сигналов от сенсоров, обработку их нейронной сетью, включая установление изменяющихся во времени электрических связей между множеством искусственных нейронов, каждый из которых способен получать и суммировать электрические сигналы от близлежащих нейронов или от внешних сенсоров, генерировать новый сигнал и передавать его другим нейронам или исполнительному механизму управляющего устройства, используют следующую процедуру. Часть упомянутых связей устанавливают до получения сигналов от сенсоров и используют их для обучения нейронной сети, часть электрических связей устанавливают автоматически в процессе работы управляющего устройства, для чего поступивший на вход данного нейрона суммарный сигнал с величиной, зависящей от совокупности всех установленных на данный момент связей нейронной сети, сравнивают с пороговым потенциалом возбуждения, величину которого ставят в зависимость от частоты предыдущих возбуждений нейрона, и в случае его превышения возбуждают данный нейрон, а именно формируют на входе нейрона нормированный отрицательный импульс, одновременно или с малой относительно длительности упомянутого импульса задержкой формируют на выходе нейрона идентичный положительный импульс с возможностью установления между нейронами, возбужденное состояние которых хотя бы частично совпадает во времени, упомянутой электрической связи, причем посредством упомянутого отрицательного импульса частично нейтрализуют поступающие электрические сигналы, обеспечивая конкуренцию нейронов за получение сигнала и препятствуя ситуации, при которой коэффициент размножения сигнала превышает единицу, благодаря чему непрерывно модифицируют проводящую структуру нейронной сети, включая образование между нейронами множества контуров обратной связи, при этом выходные управляющие сигналы управляющего устройства или часть из них используют в целях активного воздействия на параметры внешней среды и/или в целях коррекции условий получения электрических сигналов от сенсоров.
Описанный способ может иметь ряд конкретных воплощений.
Устанавливаемые между нейронами связи могут носить химическую, емкостную, резистивную природу. В частном случае выполнения способа предпочтительно выполнять упомянутые связи резистивными, которые можно реализовать, например, пробоем диэлектрика, разделяющего нейроны, или даже на базе обычных релейных элементов, если допускают габариты устройства. При этом по аналогии с синапсами биологических нейронов можно реализовать старение резистивных связей, например, заданием особых свойств диэлектрической пленки с полупроводниковым слоем или за счет диффузионных процессов в диэлектрике.
Задержка фронта положительного импульса на выходе БЭ относительно фронта отрицательного импульса на входе БЭ предназначена для повышения вероятности образования связей между событиями, отражающими ситуацию «за событием А следует событие Б», более эффективную по сравнению с образованием связи «перед событием Б было событие А».
Обучением нейронной сети может служить выработка заданной реакции на тестовую конфигурацию внешних сигналов, для чего в нейронной сети заранее устанавливают связи между нейронами от сенсора до выхода управляющего сигнала.
Для выработки требуемой реакции нейронной сети на внешние обучающие сигналы необходим какой-либо критерий поведения (минимизация расходуемой энергии, постоянство диссипируемой тепловой энергии и т.п.), отклонение от которого исправляют обучением нейронной сети. В частном случае осуществления способа этот существенный признак заключается в минимизации количества принимаемых внешних сигналов. Отметим, что для адаптивного управляющего устройства и способа организации его работы по изобретению любые внешние сигналы являются обучающими, поскольку процесс обучения продолжается без учителя в процессе работы устройства.
Процесс обучения нейронной сети управляющего устройства можно существенно ускорить, если в способе предусмотреть процессы, моделирующие усталость, восстановление работоспособности и самовозбуждение биологического нейрона. Усталость обеспечивают ступенчатым возрастанием порогового потенциала возбуждения в случае частого возбуждении нейрона, когда при каждом очередном возбуждении потенциал получает импульсную добавку по цепи с малым сопротивлением. Это вызывает возбуждение соседних БЭ и проход сигнала по другим электрическим цепям при отсутствии правильной реакции после многократного прохождения сигнала через данный БЭ. Восстановление базового элемента обеспечивают постепенным снижением порогового потенциала, вплоть до опорного, для чего предусматривают высокоомную цепь утечки.
Самовозбуждение реализуют за счет случайных флуктуации потенциала на входе БЭ. Подобные флуктуации, например индуцированная ЭДС, происходят редко и малы по величине, поэтому расчетное опорное напряжение должно быть достаточно низким.
Предлагаемый способ может быть полностью реализован программными средствами вычислительной техники. Управляющее устройство с относительно небольшим количеством БЭ может быть смоделировано на обычном персональном компьютере.
Таким образом, адаптивное управляющее устройство содержит необходимое количество сенсоров, нейронную сеть из нейроподобных базовых элементов и необходимое количество исполнительных механизмов. Технологически оно изготавливается из множества однотипных модульных блоков, на каждом из которых при площади 3-4 см2 и толщине 0,1 мм может быть сгруппировано порядка 104 нейроподобных базовых элементов, конструкция и работа которых подробно раскрыта ниже.
Техническим результатом является упрощение конструкции адаптивного управляющего устройства, расширение его функциональных возможностей и усложнение класса решаемых задач.
Сущность изобретения иллюстрируется схемами.
На фиг.1 представлена принципиальная схема управляющего устройства.
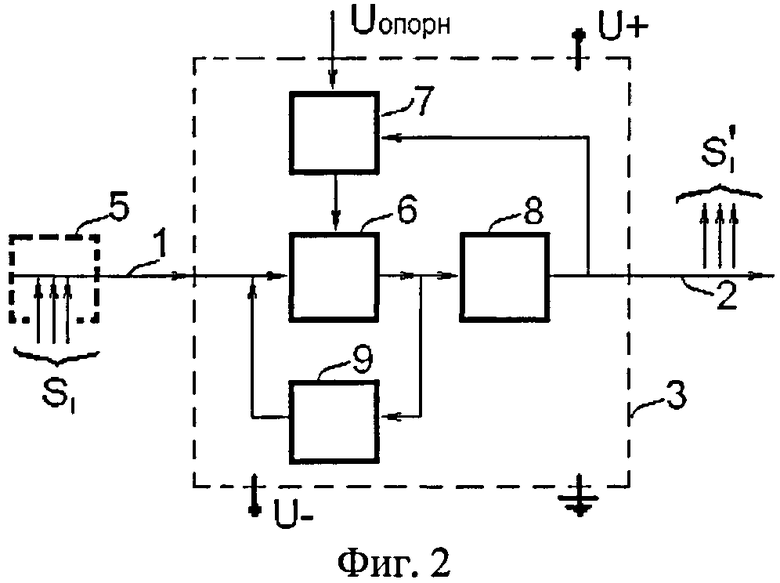
На фиг.2 схематично показана конструкция нейроподобного базового элемента.
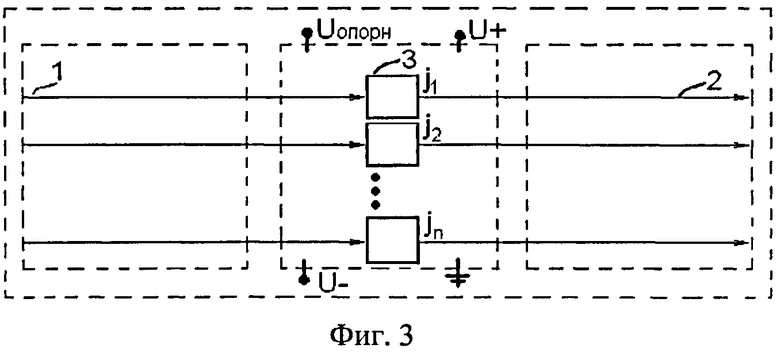
На фиг.3 приведена схема модульного блока базовых элементов.
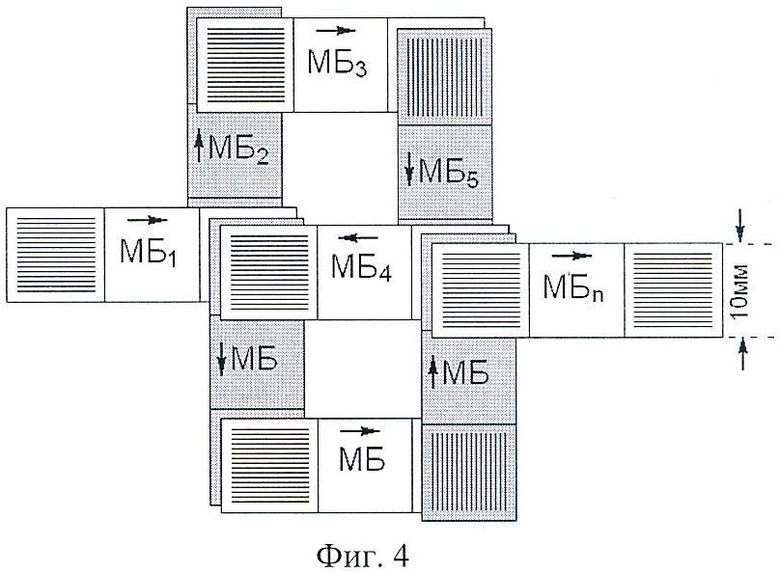
На фиг.4 показан монтаж управляющего устройства из модульных блоков.
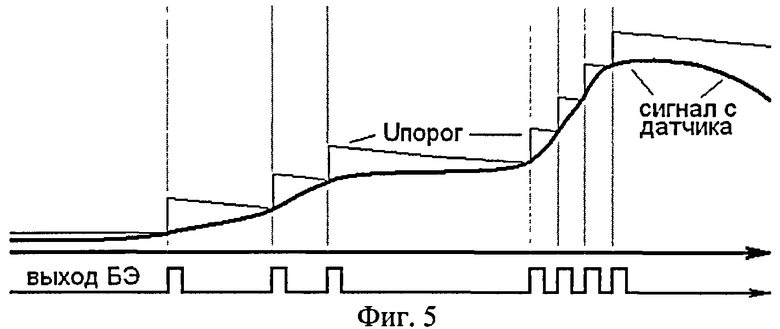
На фиг.5 показан процесс кодирования суммарного входного сигнала.
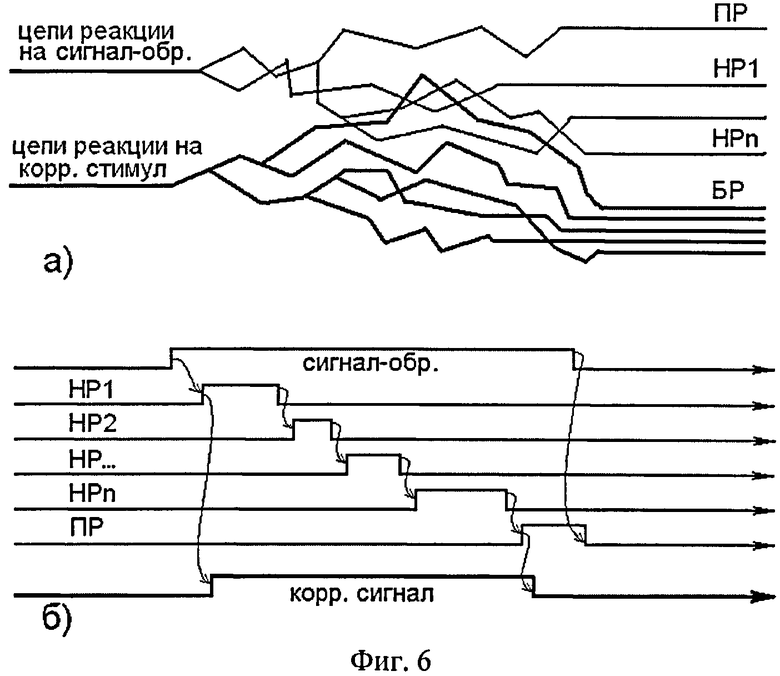
На фиг.6 показана коррекция цепей стимул - реакция при обучении нейронной сети.
На фиг.7 приведена схема простейшая физической модели, оборудованной управляющим устройством.
Используемая в описании терминология зачастую заимствована из нейроанатомии и нейрофизиологии. В этой связи все аналогии описываемых нейроподобных элементов и нейронных сетей с их биологическими прототипами следует рассматривать с большой долей условности.
Описание управляющего устройства.
Управляющее устройство (фиг.1) содержит нейроподобные базовые элементы 3 с входами 1 и выходами 2. Входы некоторых произвольных БЭ соединены с сенсорами (не показаны) и получают сигналы от внешних источников, выходы некоторых произвольных БЭ соединены с исполнительными механизмами (не показаны) и выдают управляющие сигналы. Базовые элементы образуют многослойную структуру и расположены так, что между входами и выходами близлежащих БЭ, разделенных диэлектрической пленкой с полупроводниковым слоем, могут установиться электрические связи а, b, с, d и т.д. Связи проводят сигнал в одну сторону, от выхода данного БЭ к входу близкого ему другого БЭ. Характер таких связей показан на выносном элементе на фиг.1. Связи образуют на основе известных технических решений, когда импульс напряжения вызывает электрический пробой барьерного слоя пленки, что приводит к формированию токопроводящих соединительных каналов между разрядными шинами. При этом между разрядными шинами оказывается включенным p-n диод (см., например, Электроника: Наука, Технология, Бизнес 6/2001. М.Валентинова. Экзотическая память; Pat. US 5835396, Three-dimensional read-only memory, 1998 г.).
Согласно изобретению каждый выход БЭ может иметь связь с множеством входов других БЭ, каждый вход БЭ может иметь связь с множеством выходов других БЭ, максимальное количество связей зависит от конкретной топологии многослойной нейронной сети. Кроме того, между БЭ могут образоваться многочисленные обратные связи, обозначенные на фиг.1 цифрой 4. Обратные связи могут быть короткими, как между элементами k2 и j1, или длинными, как между элементами k1 и i2. На схеме в качестве примера приведены только три группы базовых элементов i, j, k по n элементов в каждой и три обратные связи, но таких групп и связей согласно изобретению может быть множество.
Согласно изобретению часть электрических связей установлена при изготовлении, например пайкой, и используется для выполнения устройством некоторых базовых реакций при обучении нейронной сети с учителем. Эти же связи необходимы устройству и при обучении без учителя, т.е. во время работы.
К примеру, вход i1 подключен к фотоэлементу, а выход k2 к электродвигателю, перемещающему этот фотоэлемент. Заранее установленные связи образуют электрическую цепь, включающую этот электродвигатель при подаче на сенсор фотосигнала.
Управляющее устройство функционирует следующим образом.
На произвольные входы управляющего устройства поступают сигналы от сенсоров, преобразующих разнородные внешние сигналы-раздражители (оптические, акустические, температуры, давления, электромагнитные, радиационные и т.д.) в электрические сигналы стандартной амплитуды и длительности. Конструкция нейроподобного БЭ такова, что сила сигнала автоматически кодируется количеством и частотой импульсов, как показано на фиг.5. В момент пересечения линии пороговых напряжений с линией сигнала базовый элемент возбуждается и формирует на выходе нормированный импульс, а при большой величине сигнала - серию импульсов, как показано на нижней линии диаграммы на фиг.5. Каждый такой импульс может внести свой вклад в суммарный потенциал на множестве входов тех базовых элементов, с которыми установлены соответствующие электрические связи. При каждом возбуждении БЭ пороговое напряжение скачкообразно возрастает. Видно, что на начальном участке диаграммы БЭ пропускает даже малые сигналы, но в конце диаграммы БЭ не пропускает сигналы значительно большей величины. Это означает, что сигнал получает возможность попасть на входы нескольких базовых элементов, возбудить их и проложить в нейронной сети новые связи. Кроме того, выбирая возможный путь прохождения через связи, раздваиваясь и уменьшаясь по величине, сигнал может вернуться на вход предыдущего базового элемента, внеся посильный вклад в суммарный потенциал других поступающих на данный вход сигналов.
Совокупность входных сигналов от сенсоров (раздражитель) проходит через сложившуюся в УУ к данному моменту времени древовидную совокупность электрических цепей (см. фиг.6а), создавая при этом все новые связи между базовыми элементами. Нейронная сеть не только обрабатывает сигналы, сами сигналы непрерывно модифицируют проводящую структуру нейронной сети. Близкие по расположению и одновременно возбужденные БЭ оставляют на пути сигнала метку памяти - электрическую связь, благодаря чему происходит «запоминание» пути прохождения похожей конфигурации сигналов, и в дальнейшем нейронная сеть выполняет прогнозную функцию. В конечном итоге сигналы поступают на выходы управляющего устройства, соединенные с исполнительными механизмами, и становятся управляющими сигналами.
Описанная ниже топология нейронной сети предусматривает, что по мере разрастания связей в управляющем устройстве образуются связи между выходами базовых элементов, логически расположенными дальше от входа сенсоров, с входами элементов, логически расположенных ближе к входу. Тем самым реализуется локальная обратная связь, которая участвует в формировании реакции. При больших объемах УУ локальные цепи обратной связи обеспечивают возможность длительного циркулирования внутренней конфигурации сигналов по структурам нейронной сети с последовательным возбуждением множества нейронов цепи, включающей обратную связь. Так что количество последовательно возбужденных БЭ в цепи следования сигнала заведомо намного больше, чем на прямом пути от сенсора к исполнительному механизму. С одной стороны, наличие таких внутренних связей позволяет получить более адекватную реакцию устройства на конфигурацию входных сигналов. С другой стороны, циркулирование сигнала реализует прогноз последовательности событий, поскольку через данную цепь уже проходила похожая конфигурация сигналов и для приходящих на вход БЭ новых сигналов уже существует некоторая добавка к суммарному потенциалу, можно сказать, «подставка», с которой легче превзойти пороговое напряжение.
Рассмотрим устройство и работу нейроподобного базового элемента.
Схема одного из базовых элементов, совокупность которых обеспечивает работу адаптивного управляющего устройства, показана на фиг.2. Базовый элемент (БЭ) 3 содержит вход 1, выход 2 и блок преобразования сигналов, включающий компаратор 6, формирователь порогового напряжения 7 и два формирователя нормированного напряжения ФНН 8 и ФНН 9. Вход формирователя порогового напряжения 7 соединен с источником опорного напряжения. Первый вход компаратора 6 соединен с входом 1, второй вход компаратора 6 соединен с выходом формирователя порогового напряжения 7, выход компаратора 6 соединен с входом ФНН 8 и с входом ФНН 9. Для работы БЭ необходимо внешнее электрическое питание: источник регулируемого опорного напряжения, источник положительного потенциала, источник отрицательного потенциала.
Для изготовления компактной многослойной нейронной сети базовый элемент может быть конструктивно сгруппирован с множеством N таких же базовых элементов, совокупность которых образует модульный блок базовых элементов, выполненный на плоской подложке, как показано на фиг.3. Входы 1 и выходы 2 упомянутого множества базовых элементов расположены параллельно друг другу в одной плоскости, образуя две контактные площадки. Как входы, так и выходы могут быть проложены на обеих сторонах подложки.
Нейроподобный базовый элемент (фиг.2) работает следующим образом. На вход 1 от соседних БЭ или от внешних сенсоров могут быть поданы множество сигналов Si, которые суммируются в соответствии с установленными на данный момент многочисленными связями 5. Сумма входных сигналов подается на первый вход компаратора 6, при этом с выхода формирователя порогового напряжения 7 на второй вход компаратора 6 подается некоторый пороговый потенциал. Пороговый потенциал формируется индивидуально в каждом БЭ на основе опорного потенциала, подаваемого на вход формирователя порогового напряжения 7. В тот момент, когда сумма сигналов на входе 1 превысит значение порогового потенциала, БЭ возбуждается. При возбуждении базового элемента компаратор 6 подает команду на выработку нормированных напряжений и ФНН 8 формирует на выходе 2 нормированный по величине и по продолжительности положительный потенциал, который определяет продолжительность возбуждения БЭ и является сигналом выхода нейроподобного базового элемента. Одновременно ФНН 9 формирует на входе 1 отрицательный потенциал, по величине и по продолжительности равный описанному выше положительному потенциалу.
Аналогичный процесс протекает на базовых элементах следующего участка (см. фиг.1). В некоторый момент два базовых элемента в соседних блоках одновременно оказываются в возбужденном состоянии, например на выходе 2 элемента i1 сформировано напряжение +U, а на входе 1 элемента j2 сформировано напряжение -U. Поскольку выход возбужденного элемента i1 и вход возбужденного элемента j2 разделяет диэлектрик с расчетным пробойным потенциалом Uпробоя<2U, возникает пробой диэлектрического слоя и между базовыми элементами образуется резисторная связь, обозначенная на схеме точкой а. Если возбужден только один БЭ, установление связи невозможно.
Выход 2 БЭ 3 может установить электрические связи с множеством соседних БЭ, что показано на схеме фиг.2 как множество сигналов Si.
Отрицательный потенциал, формируемый при возбуждении БЭ через низкоомный резистор (на фиг.2 не показан), поступает на вход 1, резко уменьшая суммарный потенциал входных сигналов Si в период возбуждения БЭ, обеспечивая тем самым конкуренцию базовых элементов.
При частом возбуждении БЭ на накопительную емкость входа формирователя порогового напряжения 7 (не показана) с выхода ФНН 8 подается положительный потенциал и пороговое напряжение возрастает настолько, что БЭ перестает возбуждаться, моделируя усталость синапса биологического нейрона. Отрицательный импульс перестает подаваться на вход 1 БЭ и перестает «подсаживать» суммарный потенциал сигналов Si. Это способствует возбуждению других БЭ, соседствующих по связям с уставшим БЭ. При долгом отсутствии возбуждений пороговый потенциал стекает через высокоомный резистор (не показан) и медленно снижается, стремясь к опорному потенциалу Uопорн. Так реализуется восстановление работоспособности БЭ.
Согласно изобретению базовый элемент нейронной сети, имея многоточечный вход, оперирует не сигналами внешней среды, а суперпозицией сигналов, полученных от разных источников. Поскольку сигналы передаются от сенсоров к исполнительным механизмам только через возбужденные базовые элементы, сигнал, поступивший на вход, может быть передан в двух случаях: либо он имеет величину больше пороговой, либо на вход поступило несколько сигналов и их суммарная величина выше пороговой, т.е. выполнено условие возбуждения БЭ. При возбуждении генерируется новый сигнал, который может быть передан по нейронной сети. Сигнал передается либо через вновь устанавливаемую связь, либо через связи, установленные ранее. Если связей нет, возбужденный БЭ не передает сигнал дальше. Поскольку сигнал передается от слоя к слою нейронной сети не в исходном виде, а постоянно генерируется, сигнал не затухает.
Сопротивление вновь образованной связи R(t0)=Rmin со временем увеличивается R(t>t0)>R(t0). На фиг.1 связи b и с на входе элемента j1 имеют разную проводимость, так что два одинаковых по величине сигнала с выходов элементов i1 и in вносят разный вклад в суммарный сигнал, поступающий на вход компаратора элемента j1, что позволяет отказаться от синапсов, вычисляющих веса сигналов в устройстве-прототипе. В устройстве по изобретению конкуренция базовых элементов за приходящие на их входы сигналы способствует тому, что для сложившейся на данный момент проводимости связей один из БЭ имеет преимущество и определяет путь дальнейшего следования сигнала как наиболее подходящий для данной конфигурации входных сигналов.
Многослойную нейронную сеть монтируют из идентичных модульных блоков МБi путем наложения друг на друга контактных площадок, ортогонально, как показано на фиг.4, или под некоторым углом друг к другу. В последнем случае архитектурные варианты нейронной сети могут быть существенно расширены. Сборка может быть выполнена в виде спиралей, колодцев, шестигранных сот, их сочетаний и т.п. Число слоев практически не ограничено и зависит от сложности задач управления, которые будет решать адаптивное управляющее устройство. Плоскости всех блоков остаются параллельными. Ортогонально плоскостям блоков прокладывают шины питания Uопорн, U+, U-, как показано на фиг.3, которые запитываются от общих для сборки источников. В отличие от традиционных нейронных сетей, в которых слои нейронов следуют друг за другом, изобретение предусматривает контакт выходов последующих модульных блоков с входами предыдущих, что обеспечивает образование обратных связей. В случае усложнения задачи появляется возможность наращивать количество слоев и количество модульных блоков в каждом слое в процессе эксплуатации системы.
Электронные элементы БЭ работают на малых токах. При необходимости БЭ всегда могут быть снабжены средствами преобразования их в сигналы требуемой мощности.
Описанная выше организация формирования потенциалов на выходе и на входе БЭ позволяет решить две основные задачи:
а) обеспечить установление электрической связи между двумя одновременно возбужденными БЭ посредством следа пробоя диэлектрика, имеющего специально подобранную удельную электрическую прочность и отделяющего выход одного БЭ от входа расположенного рядом БЭ. Модульное условие установления новой связи между БЭi и БЭj:
|Uвых i-Uвх j|>|Uпробоя| при |Uпробоя|>|Uвых|, |Uвх|
б) при любой конфигурации входных сигналов обеспечить возбуждение только того БЭ, у которого благодаря повышенным весам сигналов сложилась наибольшее значение суммы потенциалов на входе. Этим реализуется конкуренция базовых элементов, имеющих связи с данной конфигурацией входных сигналов: возбуждение первого же БЭ препятствует возбуждению других БЭ, на входы которых поступают сигналы, участвовавшие в возбуждении первого возбудившегося БЭ.
При такой организации УУ непрерывно образуется множество новых связей, но не происходит самовозбуждения УУ. Среднее количество БЭ, возбудившихся в следующем каскаде, не больше количества возбуждающих базовых элементов предыдущего каскада, благодаря чему самовозбуждение УУ невозможно. Другими словами, в управляющем устройстве коэффициент размножения сигнала К не превышает единицу. При подаче на вход первого каскада m сигналов на выходе N-го каскада в среднем будет присутствовать m1=m·KN сигналов и при K≤1 всегда m1≤m.
Таким образом, при осуществлении способа по изобретению на входы УУ подают сигналы от сенсоров, преобразующих разнородные внешние сигналы-раздражители (оптические, акустические, температуры, давления, электромагнитные, радиационные и т.д.) в электрические сигналы стандартной амплитуды и длительности, суммарный сигнал на входе БЭ сравнивают с пороговым потенциалом возбуждения, а силу сигнала-раздражителя кодируют количеством и частотой нормированных импульсов.
Совокупность входных сигналов от сенсоров, проходя через сложившуюся в УУ к данному моменту разветвленную совокупность электрических цепей из нейроподобных элементов, включая короткие и длинные цепи обратной связи нейронной сети, подвергается обработке. В конечном итоге сигналы в виде многоразмерного отклика, т.е. измененной совокупности нормированных сигналов, попадают на выходы нейронной сети, соединенные с исполнительными механизмами управляющего устройства. Согласно способу по изобретению управляющие сигналы устройства или часть из них используют в целях активного воздействия на параметры внешней среды или в целях коррекции условий получения сигналов от сенсоров. В частности, управляющие сигналы обеспечивают действия исполнительных механизмов, направленные на уменьшение входных сигналов, т.е. осуществляют глобальную обратную связь, необязательно электрическую, между входом и выходом управляющего устройства через внешнюю среду.
Действие исполнительных механизмов по уменьшению входных сигналов может быть самым разнообразным, от перемещения УУ в пространстве до ликвидации источников сигнала, что приводит к изменению всей конфигурации внешних сигналов, поступающих на входы УУ.
Простые (базовые) реакции на элементарные сигналы сенсоров задают прокладкой некоторого количества связей между базовыми элементами при изготовлении устройства. Сложные реакции формируют первичным обучением нейронной сети, после чего устройство адаптируется самостоятельно.
Конфигурация входных сигналов в исходном состоянии является функцией состояния окружающей среды, количества и расположения сенсоров. Прохождение сигналов через проводящую среду УУ приводит не только к видимой реакции УУ на входные сигналы, проявляющейся в действии исполнительных механизмов, но и к непрерывному изменению внутренней проводящей структуры УУ под воздействием проходящих сигналов. Это изменение происходит за счет образования новых, наиболее весомых поначалу электрических связей между парами одновременно возбужденных соседних БЭ.
Согласно изобретению со временем происходит уменьшение весов образованных между БЭ связей, что моделирует забывание, старение связей биологических нейронов. В общем случае старение связей в различных местах нейронной сети может протекать с разными скоростями. Поступающие сигналы получают возможность возбуждать другие БЭ и проходить через УУ по новым электрическим цепям. Изменение структуры связей в УУ проявляется в изменении реакции УУ на одну и ту же конфигурацию входных сигналов, что свидетельствует о переобучении нейронной сети.
Отметим, что УУ самостоятельно не генерирует сигналы. Оно лишь транслирует сигналы через свои структуры с коэффициентом размножения на каждом этапе K≤1. Это приводит к тому, что при отсутствии внешних сигналов УУ не подает никаких команд на свои исполнительные механизмы, как бы замирает до тех пор, пока не появятся какие-либо возмущающие сигналы на ее входе.
Такое поведение устройства задано базовыми связями, проложенными при его изготовлении: на сигнал сенсора устройство отвечает вполне однозначной командой исполнительному механизму, уменьшающему величину входного сигнала. Понятно, что предусмотренные задачами УУ функции исполнительного механизма должны соответствовать характеру сигнала внешней среды. На этом же стремлении управляющего устройства к уменьшению величины входного сигнала основано и обучение устройства. Если в результате своих предыдущих реакций на входные сигналы УУ попадает в положение с отсутствием входных (возбуждающих, раздражающих) сигналов, оно перестает действовать. Заметим, что это состояние УУ устойчиво, аналогично минимуму потенциальной энергии шарика на неровной поверхности, в отличие от состояния при получении сигналов сенсоров, побуждающих устройство задействовать исполнительные механизмы, и согласуется с принципом наименьшего действия для механических систем.
При стремлении к уменьшению до минимума одного сигнала устройство может столкнуться с ростом другого сигнала. В итоге оно переходит к процессу минимизации суммы двух сигналов, в общем случае - суммы всех входных сигналов. Другими словами, УУ стремится к достижению своей локальной цели - уйти от сигналов-раздражителей независимо от степени адекватности реакций УУ на внешние сигналы, начиная от базовых реакций, задаваемых при изготовлении УУ.
Это носит некоторую аналогию с безусловными рефлексами биологических организмов. Все безусловные рефлексы биологического организма реализуют его стремление уйти от опасности, чаще всего за счет изменения своего местоположения. Так, простейший биологический организм пытается снизить раздражения до нуля, более сложный организм может осуществлять другие, более сложные причинно-следственные реакции.
Использование принципа минимизации входных (раздражающих) сигналов сенсоров в практических целях можно проиллюстрировать на действиях управляющего устройства для лифта в многоэтажном доме. Вызов лифта пассажиром должен иметь преимущество перед командой управляющего устройства, посылающего лифт в заданное время на заданный этаж. Если порядок вызова лифта на этажи подчиняется некоторой закономерности, например утром в t1 - этаж n, в t2 - этаж n+2, в t3 - этаж n-2 и т.д., то можно оптимизировать энергозатраты, обучив нейронную сеть минимизировать время пустых (без пассажиров) поездок лифта между этажами, для этого время пустых поездок нужно назначить входными (раздражающими) сигналами.
Очень редкие случаи самопроизвольного возбуждения БЭ с генерацией сигнала, не инициированного входными сигналами, могут лишь на короткое время вывести УУ из состояния покоя (равновесия), поэтому эти спонтанно сгенерированные импульсы не могут оказывать существенного влияния на поведение УУ. Хотя могут приводить (и приводят) к изменению структуры УУ путем установления новых связей между самовозбудившимися и другими возбудившимся БЭ, в частности побудить устройство выйти из ситуации отсутствия сигналов от сенсоров и повторить весь цикл ответных реакций на изменившуюся конфигурацию входных сигналов.
Рассмотрим процесс первичного обучения адаптивного управляющего устройства (см. фиг.1).
По завершении сборки УУ осуществляется установка базовых связей между некоторыми БЭ, так что образуются цепочки от сенсоров до исполнительных механизмов, включение которых приводит к такому изменению конфигурации входных сигналов, что входные сигналы уменьшаются (уход, перемещение от возбуждающих сигналов без изменения их источника; «экранирование» от воздействия и т.д.). Чем больше таких предварительно установленных связей заложено в УУ, тем большее количество базовых реакций предусмотрено в его конструкции. После выполнения заводских установок УУ готово к функционированию в простейших ситуациях. Предварительная установка базовых связей на этапе изготовления УУ определяет реагирование УУ на «опасности» и носит некоторую аналогию с образованием безусловных рефлексов в биологическом организме.
Заводская установка базовых связей осуществляется аппаратным способом следующим образом:
а) на сенсор подают сигнал. При этом задают, на какой БЭ (или модульный блок) подается сигнал и на выходе какого БЭ появится сигнал. Задают, из какого блока выходит сигнал первой ступени и к каким блокам второй ступени подходит сигнал с блока первого уровня. Между БЭ может образоваться связь. Мы не прокладываем ее вручную, а создаем условия для ее образования. Эти условия создают следующим образом:
б) медленно понижают регулируемое опорное напряжение на блоке второго уровня с целью, чтобы в каком-либо БЭ из этого блока 2-го уровня произошло самовозбуждение и в результате БЭ первого уровня образовал связь с БЭ из блока второго уровня во время его самовозбуждения. Отметим, что до образования этой базовой связи все БЭ из блока 2-го уровня не имели связей и не могли быть возбуждены ни через один из своих входов;
в) факт самовозбуждения каких-то БЭ 2-го уровня может быть установлен по увеличению тока в цепях питания блока 2. Факт установления связи между возбуждаемым БЭ 1-го уровня и одним из самовозбудившихся БЭ 2-го уровня может быть установлен, например, по радиоизлучению из области контакта в момент пробоя. Целесообразно концы проводников входов-выходов всего блока соединить и сделать вывод для контроля, а после установления базовых связей установочные проводники удалить;
г) возвращают опорное напряжение на блоке 2-го уровня в норму и медленно понижают опорное напряжение для блока 3-го уровня, добиваясь самовозбуждения некоторых БЭ в его составе, и, продолжая подавать сигналы на вход БЭ блока 1-го уровня, проводят процедуру, аналогичную пунктам б) и в), для установления базовой связи, проводящей сигнал между выходом возбуждаемого БЭ 2-го уровня и входом самовозбудившегося БЭ 3-го уровня;
д) повторяют подобную процедуру прокладки базовых связей от сенсора до установления связи с приводом нужного исполнительного механизма, выбирая нужный путь прохождения сигнала путем выбора блока на каждом этапе прокладки очередного звена устанавливаемой цепи. Так что по завершении прокладки связи и возвращении опорных напряжений для всех блоков в норму при подаче сигнала на вход сенсора получаем нужную, установленную «вручную», реакцию на выходе УУ в виде действия исполнительного механизма, уменьшающего этот входной сигнал;
е) процедура установления базовых связей от инициирующего сенсора до реакции, уменьшающей его сигналы, повторяется нужное число раз до создания в УУ необходимого набора исходных реакций, обеспечивающего возможность дальнейшего обучения и функционирования УУ.
Предварительная установка базовых связей необходима, но недостаточна для работы многофункционального УУ.
Адаптируемые устройства должны учиться на собственном опыте, а на начальном этапе - путем первичного обучения, получая входные сигналы от инструктора. Как только устройство создаст модель своих реакций, оно сможет распознавать аналогии, основанные на прошлом опыте, для прогнозирования будущих событий и предлагать решение новых для него задач. Возникает необходимость в создании способов скоростного обучения управляющего устройства.
После завершения формирования в УУ приемлемого количества базовых реакций проводят первичное обучение, расширяющее набор адекватных (желаемых) реакций на конфигурацию входных сигналов сенсоров.
Первичное обучение основано на искусственном подавлении и естественном забывании электрических связей, дающих неправильные управляющие сигналы, и организации новых связей между нейроподобными базовыми элементами, приводящим к все более адекватным реакциям управляющего устройства на поступающие сенсорные сигналы. Нейронную сеть обучают, заменяя связи, дающие неправильную реакцию, на новые связи, дающие все более правильные ответные реакции. Тем самым в управляющем устройстве задают образцы поведения для выработки правильных реакций, после чего устройство адаптируется к изменяющимся внешним сигналам самостоятельно.
Обучение нейронной сети осуществляют при помощи подачи на устройство корректирующих сигналов, предъявляемых учителем (см. фиг.5 и 6). Реакция УУ на внешние сигналы состоит во включении исполнительных элементов, получивших управляющие сигналы после прохождении сигналов сенсоров по установленным заранее и по сложившимся новым цепям нейросети, от сигнала сенсора до реакции, как показано на фиг.6а. Здесь БР - базовая реакция (аналог условного рефлекса), HP - неправильная реакция, ПP - правильная реакция. Если в результате реакции УУ сигнал-образец уменьшится, это правильная реакция (ПР). В противном случае наблюдаем неправильную реакцию (HP). Если сила сигнала сенсора увеличивается, то усиливается и реакция на поступившую на выход череду импульсов как за счет более частого прохождения сигнала по одной и той же цепи, так и за счет распространения сигнала по параллельным цепям, что заложено в конструкцию нейроподобного элемента.
Начальное обучение ведется с учителем по следующей схеме.
Подается сигнал-образец. Если реакция УУ на предъявленный сигнал-образец правильная, то в памяти УУ остается только что исполненная цепочка связей, которая и будет воспроизводиться при последующих предъявлениях данного сигнала. Если же реакция УУ на образец неправильная (HP), то учитель (инструктор) включает корректирующий сигнал - сильный сигнал-раздражитель (нижняя диаграмма на фиг.6б), вызывающий прохождение большого количества импульсов БР по цепям базовых реакций (толстые линии на фиг.6а). В результате постепенного разрастания (разветвления) связей в УУ появляются области с электрическими цепями, по которым проходят как сигналы неправильной реакции УУ на образец, так и сигналы реакции УУ на корректирующий сигнал. Это позволяет подачей корректирующего сигнала вызвать конкуренцию БЭ и их уставание и заблокировать прохождение сигнала по цепи неправильной реакции.
В результате уставания и блокирования цепи неправильной реакции образуются новая цепь реакции УУ на сигнал-образец. Если эта новая цепь реакции также не устраивает учителя, он продолжает подавать на вход УУ сильный корректирующий сигнал. Когда реакция УУ на сигнал-образец становится правильной (ПР), т.е. реакция УУ приводит к выключению или уменьшению сигнала-образца, учитель выключает корректирующий сигнал. Обучение заканчивается. При последующем предъявлении этого же сигнала-образца УУ будет действовать по последнему варианту, поскольку связи, реализовавшие ее, имеют наибольший вес.
При длительной безрезультативности подачи корректирующего сигнала цепи БР разрастаются, возбуждая большое количество близлежащих базовых элементов. Наконец они достигают области прохождения цепей HP на сигнал-образец (верхняя линия цепи сигнала на фиг.6а) и приносят результат - блокируют цепи неправильной реакции.
Так происходит обучение простым реакциям с использованием сильного корректирующего сигнала. В данном случае действенность, результативность корректирующего сигнала довольно проста, однако конфигурации сигналов-образцов должны подбираться такими, чтобы достижение правильной реакции было достаточно быстрым.
Обучение сложной реакции проводится ступенчато, в несколько этапов. За несколько этапов на основе сильного корректирующего сигнала формируется реакция УУ на гораздо меньший корректирующий сигнал. Многоступенчатость обучения состоит во включении все более сильных корректирующих сигналов при отсутствии правильной реакции УУ на предъявление слабого корректирующего сигнала. Для этого перед применением сильного корректирующего сигнала включается более слабый корректирующий сигнал, чтобы создать электрическую цепь прогноза возможности применения сильного корректирующего сигнала, если реакция не изменится.
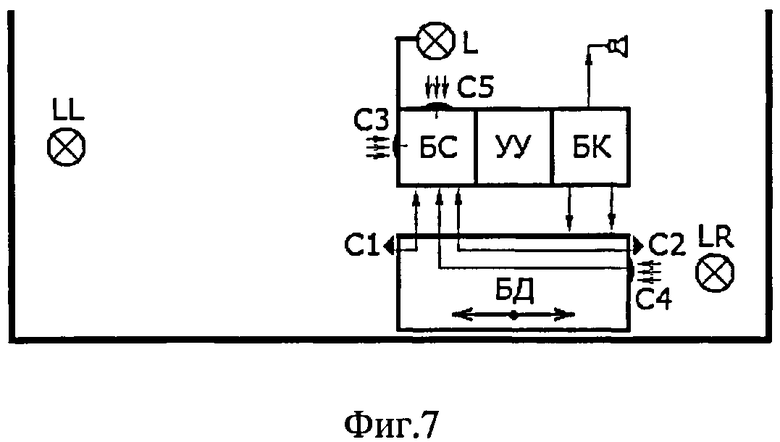
Работа адаптивного управляющего устройства в простейшем исполнении иллюстрируется примером (фиг.7).
Тележка оборудована управляющим устройством (УУ), источником питания, звуковой сиреной. Имеется блок движения БД, под действием которого тележка может двигаться влево-вправо между двумя стенами с расстоянием между ними в 2 метра. Имеется источник L сильного света сверху, изображающий любой дополнительный внешний сигнал. Источник сильного света может включаться экспериментатором и выключаться автоматически по звуковому сигналу. С помощью сирены УУ может подать такой звуковой сигнал. Блок движения тележки (БД) моделирует внешние воздействия, при отсутствии которых тележка находится в покое (нейронная сеть засыпает). В случайные моменты времени БД включает движение тележки на случайное расстояние в диапазоне 0,4÷0,6 м в случайном направлении (влево или вправо).
На тележке закреплен блок сенсоров БС с сенсорами:
сенсор С1 контакта с левой стеной;
сенсор С2 контакта с правой стеной;
сенсор С3 опасного сближения с левой стеной на расст. 0,2 м (лампа LL);
сенсор С4 опасного сближения с правой стеной на расст. 0,2 м (лампа LR);
сенсор С5 сильного света сверху (лампа L).
При получении сигналов от сенсоров УУ может подавать на БД тележки три сигнала: приказ на движение на 0,3 м вправо, приказ на движение на 0,3 м влево, приказ на подачу звукового сигнала. Сигналы, поступающие от управляющего устройства, имеют более высокий приоритет, чем случайные сигналы на перемещение, подаваемые блоком движения БД.
УУ смонтировано, например, из 10 БЭ по 20 входов в каждом так, чтобы физически обеспечить возможность образования связей между любыми БЭ. Перед испытаниями проводим в УУ заводские установки по описанному выше алгоритму, а именно прокладываем цепи базовых реакций.
Сигнал сенсора С1 включает БЭ контакта с левой стеной, который включает БЭ «включить движение вправо», который подает сигнал на БД приказ «вправо». Эта цепочка связей обеспечивает функционирование базовой реакции «при столкновении с левой стеной включить движение вправо».
Сигнал сенсора С2 включает БЭ контакта с правой стеной, который включает БЭ «включить движение влево», который подает сигнал на БД (приказ «влево»). Эта цепочка связей обеспечивает функционирование заложенной заранее базовой реакции «при столкновении с правой стеной включить движение влево».
Для ввода в УУ сигналов от сенсоров:
соединим сенсор С3 с соответствующим БЭ;
соединим сенсор С4 с соответствующим БЭ;
соединим сенсор С5 с БЭ сенсора сильного света.
Вначале базовые элементы не задействованы в цепях реакции УУ на сигналы.
а) Адаптация (самообучение) нейронной сети.
Отключим выдачу сигналов для всех сенсоров, кроме сенсоров контакта со стенами. Поведение УУ будет очень простым: в ходе случайных блужданий от случайных сигналов с БД при контакте с одной из стен тележка будет отодвигаться в противоположную от стены сторону.
Теперь включим сигналы для сенсоров опасного сближения со стеной на 0,2 м. В случае первого срабатывания сенсора сближения с правой стеной, но без контакта с ней в УУ ничего не произойдет. Но если сработает сенсор сближения с правой стеной и в этом же маневре вправо стена будет достигнута, то кроме установленного при сборке приказа «влево» будут одновременно возбуждены два БЭ и в УУ установится электрическая связь «за сближением с правой стеной следует контакт справа». Так что в следующий раз при срабатывании сенсора сближения с правой стеной через установившуюся в предыдущем эпизоде упомянутую связь с выхода БЭ опасного сближения на вход БЭ контакта с правой стеной поступит электрический сигнал и на его выходе появится команда для БД - «влево», поскольку одновременно с возбуждением БЭ сближения возбудится и БЭ контакта со стеной. Так что впоследствии «опасный» контакт с правой стеной уже никогда не будет иметь места -произошло обучение УУ. Точно так же автоматически установится связь при взаимодействии с левой стеной и возникнет приобретенная реакция на сближение.
б) Переучивание нейронной сети.
Если теперь существенно изменить условия взаимодействия УУ с внешней средой - поменять местами сенсоры сближения со стенами, то при сближении с правой стеной, когда срабатывает бывший сенсор сближения с левой стеной, по существующей связи «за сближением с левой стеной следует контакт слева» тележка включит движение вправо и столкнется с правой стеной. Но при достижении правой стены сработает установленная при изготовлении базовая «безусловная связь» и тележка получит приказ «влево». В этом же эпизоде будет иметь место одновременное возбуждение БЭ, ранее принимавшего сигнал о сближении с левой стеной и БЭ контакта с правой стеной. Между ними образуется новая связь, более сильная, чем успевшая устареть связь между БЭ сближения с левой стеной и БЭ контакта с левой стеной. Поэтому при последующих возбуждениях бывшего БЭ сближения с левой стеной он будет быстрее возбуждать БЭ контакта с правой стеной и включать сигнал-приказ «влево». Возбужденный БЭ контакта с правой стеной сразу же будет «подсаживать» напряжение на выходе БЭ бывшего сближения с левой стеной, так что БЭ контакта с левой стеной уже не будет возбуждаться и не будет выдавать приказ «вправо». Точно так же произойдет переучивание УУ для БЭ бывшего сближения с правой стеной.
в) Поиск решения в неизвестной ситуации.
Включаем яркий свет, в результате чего возбуждается БЭ яркого света. В этот момент может сработать какой-либо БЭ движения, например БЭ сближения. Тележка под влиянием возникшей ошибочной связи между БЭ яркого света и БЭ сближения начнет двигаться, ведь у нее пока нет других реакций. Как сказано выше, устойчивым состоянием системы является отсутствие сигналов. По сути дела, управляющее устройство перебирает возможные варианты реакций, пытаясь выключить верхний свет, т.е. уменьшить количество сигналов. Некоторое время - безрезультатно, свет выключаться не будет. Тележка достигнет стены (контакт) и покатится в противоположном направлении. И будет так кататься некоторое время, но БЭ контактов со стеной начнут уставать, их пороги срабатывания будут повышаться, так что появится возможность самовозбуждения базового элемента включения сирены. Включится сирена, сильный свет автоматически погаснет, что заложено в условия задачи. Так что в результате случайного поиска УУ будет найден выход из почти тупиковой ситуации. Установившаяся связь между БЭ яркого света и БЭ сирены сохраняется (в пределах старения связи). Так что в следующем эпизоде на раздражение ярким светом сработает сирена и лампа L будет сразу выключена.
Описанный пример иллюстрирует существенные признаки, обеспечивающие усталость базового элемента, самовозбуждение базового элемента и старение его связей. Действительно, каждый БЭ имеет текущее пороговое напряжение срабатывания компаратора, опирающееся на заданное опорное напряжение. Частое срабатывание БЭ приводит к росту внутреннего порогового напряжения и к потере способности к возбуждению (случай с многократным движением влево-вправо), долгое пребывание БЭ в невозбужденном состоянии приводит его к самовозбуждению в результате снижения порогового напряжения ниже некоторого предела (случай с включением сирены), а уменьшение проводимости старых связей изменяет путь движения сигнала (сигнал сирены опережает сигнал движения). Технические параметры базового элемента определяют расчетным путем. Точно так же несложно определение длительности сигналов, генерируемых БЭ, длительности импульсов движения, длительности реакции выходов различных сенсоров, которые рассчитывают исходя из физических условий задачи.
Источники информации
1. Artificial Neural Networks: Concepts and Theory, IEEE Computer Society Press, 1992; J.A.Anderson, An introduction to neural networks, Chapter 2, MIT, 1999.
2. Патенты RU 2128857, 1999; RU 2295769, 2007.
3. Патенты RU 66831, 2007; RU 7208, 2008; RU 75247, 2008; RU 77483, 2008.
4. Pat. US 5347613, 1994; US 6643627, 2003; US 7426501, 2008.
5. Pat. US 5220641, 1993 (прототип).
6. http://habrahabr.ru/blogs/hardware/14025/.
7. М.Валентинова. Электроника: Наука, Технология, Бизнес, 6/2001; Pat. US 5835396, 1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования адаптационных процессов в нейронных сетях | 1979 |
|
SU773650A1 |
| Нейроподобный элемент | 1991 |
|
SU1816325A3 |
| ОПТОЭЛЕКТРОННАЯ МОДЕЛЬ НЕЙРОННОЙ СЕТИ | 1992 |
|
RU2070334C1 |
| НЕЙРОПОДОБНЫЙ ЭЛЕМЕНТ | 2020 |
|
RU2744361C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОПОДОБНОЙ СЕТИ | 1992 |
|
RU2094843C1 |
| Персональный телемедицинский комплект для дистанционного контроля жизненно важных параметров состояния здоровья человека | 2021 |
|
RU2752137C1 |
| ОПТОЭЛЕКТРОННАЯ МОДЕЛЬ НЕЙРОННОЙ СЕТИ | 1991 |
|
RU2074417C1 |
| Модуль нейроподобной сети | 1990 |
|
SU1803923A1 |
| УСТРОЙСТВО ДЛЯ ГЕНЕРАЦИИ НЕЙРОПОДОБНЫХ КОЛЕБАНИЙ С ВОЗБУДИМЫМ И АВТОКОЛЕБАТЕЛЬНЫМ РЕЖИМАМИ И ПРИНЦИП ЕГО РАБОТЫ | 2021 |
|
RU2794549C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ САМООРГАНИЗУЮЩИХСЯ СЕТЕЙ НЕФОРМАЛЬНЫХ НЕЙРОНОВ | 2011 |
|
RU2484527C1 |
Изобретения относятся к аналого-цифровым управляющим устройствам и могут быть использованы при создании систем автоматического управления объектами и технологическими процессами, а также для моделирования мозга человека. Техническим результатом является упрощение конструкции устройства, расширение его функциональных возможностей и усложнение класса решаемых задач. Устройство включает множество нейроподобных базовых элементов (БЭ), сгруппированных в модульные блоки так, что выходы одних БЭ ортогональны входам других БЭ и разделены диэлектрической пленкой с полупроводниковым слоем. Нейроподобный базовый элемент содержит многоточечный вход для приема и суммирования электрических сигналов, рабочий выход и блок обработки сигналов, включающий формирователь порогового напряжения, компаратор, два формирователя нормированного напряжения. 3 н. и 7 з.п. ф-лы, 7 ил.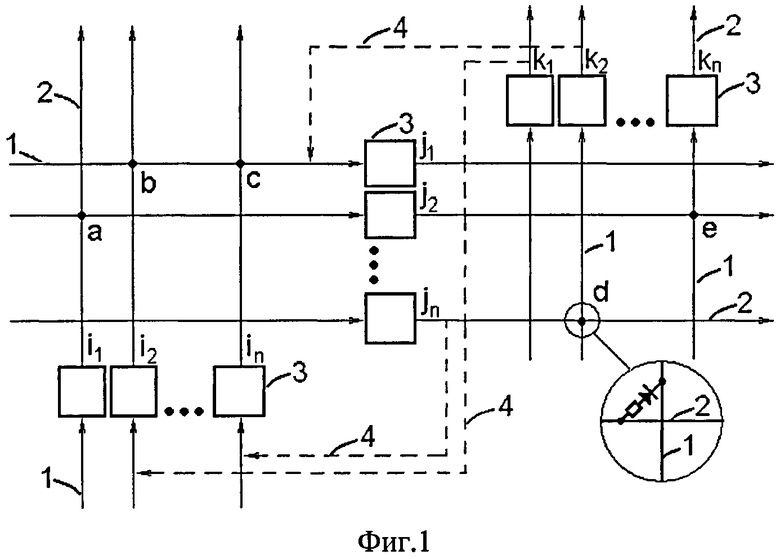
1. Адаптивное управляющее устройство, содержащее множество нейроподобных базовых элементов (БЭ), каждый из которых имеет вход и выход, способен принимать и суммировать электрические сигналы от сенсоров или от других БЭ и переходить в возбужденное состояние с генерацией электрического сигнала, который может быть передан множеству других БЭ или исполнительному механизму устройства, сгруппированных в М>1 плоских модульных блоков по N>1 БЭ в каждом так, что выходы БЭ одного блока расположены ортогонально или под некоторым углом к входам БЭ другого блока, образуя, по крайней мере, одну сетку с N2 узлами, отличающееся тем, что выходы БЭ одного блока наложены на входы БЭ другого блока через диэлектрическую пленку с полупроводниковым слоем, каждый из упомянутых узлов сетки при создании разности потенциалов, достаточной для пробоя диэлектрика, имеет возможность образовать между выходом одного БЭ и входом другого ему подобного БЭ резистивную связь, проводимость которой уменьшается со временем, входы некоторых произвольных БЭ соединены с сенсорами и назначены для приема сигналов от внешних источников, выходы некоторых произвольных БЭ соединены с исполнительными механизмами управляющего устройства и назначены для выдачи управляющих сигналов, причем часть упомянутых резистивных связей проложена заранее при изготовлении управляющего устройства и при подаче сигнала образует, по крайней мере, одну электрическую цепь от входа, соединенного с сенсором, до выхода, соединенного с исполнительным механизмом.
2. Нейроподобный базовый элемент адаптивного управляющего устройства, содержащий многоточечный вход для приема и суммирования электрических сигналов от ему подобных базовых элементов (БЭ) или от внешних источников, рабочий выход и блок обработки сигналов, имеющий возможность генерировать электрические сигналы при возбуждении БЭ, отличающийся тем, что блок обработки сигналов содержит формирователь порогового напряжения, соединенный с источником регулируемого опорного напряжения, компаратор и два формирователя нормированного напряжения (ФНН), первый из которых формирует положительные прямоугольные импульсы, второй формирует такие же по величине и продолжительности отрицательные прямоугольные импульсы, компаратор соединен с многоточечным входом БЭ и с выходом формирователя порогового напряжения, вход первого ФНН соединен с выходом компаратора, выход первого ФНН соединен с рабочим выходом БЭ и с входом формирователя порогового напряжения, вход второго ФНН соединен с выходом компаратора, выход второго ФНН соединен с многоточечным входом базового элемента.
3. Нейроподобный базовый элемент по п.2, отличающийся тем, что он сгруппирован с множеством таких же базовых элементов, выполненных на плоской подложке, образуя модульный блок базовых элементов, имеющий две односторонние или двусторонние контактные площадки с параллельными друг другу входами и выходами.
4. Способ организации работы адаптивного управляющего устройства, включающий получение электрических сигналов от сенсоров, обработку их нейронной сетью, включая установление изменяющихся во времени электрических связей между множеством искусственных нейронов, каждый из которых способен получать и суммировать электрические сигналы от близлежащих нейронов или от внешних сенсоров, генерировать новый сигнал и передавать его другим нейронам или исполнительному механизму управляющего устройства, отличающийся тем, что часть упомянутых связей устанавливают до получения сигналов от сенсоров и используют их для обучения нейронной сети, часть электрических связей устанавливают автоматически в процессе работы управляющего устройства, для чего поступивший на вход данного нейрона суммарный сигнал сравнивают с пороговым потенциалом возбуждения, величину которого ставят в зависимость от частоты предыдущих возбуждений нейрона, и в случае его превышения возбуждают данный нейрон, а именно формируют на входе нейрона нормированный отрицательный импульс, одновременно или с малой относительно длительности упомянутого импульса задержкой формируют на выходе нейрона идентичный положительный импульс с возможностью установления между нейронами, возбужденное состояние которых хотя бы частично совпадает во времени, упомянутой электрической связи, причем посредством упомянутого отрицательного импульса частично нейтрализуют поступающие на вход нейрона электрические сигналы, обеспечивая конкуренцию нейронов за получение сигнала и препятствуя ситуации, при которой коэффициент размножения сигнала превышает единицу, благодаря чему непрерывно модифицируют проводящую структуру нейронной сети, включая образование между нейронами множества контуров обратной связи, при этом выходные управляющие сигналы управляющего устройства или часть из них используют в целях активного воздействия на параметры внешней среды и/или в целях коррекции условий получения электрических сигналов от сенсоров.
5. Способ по п.4, отличающийся тем, что упомянутые электрические связи устанавливают преимущественно резистивного типа.
6. Способ по п.5, отличающийся тем, что обеспечивают уменьшение во времени электрической проводимости установленных резистивных связей.
7. Способ по п.4, отличающийся тем, что упомянутым первичным обучением нейронной сети формируют набор требуемых выходных управляющих сигналов при заданной конфигурации сигналов сенсоров.
8. Способ по п.4, отличающийся тем, что упомянутым первичным обучением нейронной сети обучают управляющее устройство минимизировать количество входных сигналов.
9. Способ по п.4, отличающийся тем, что упомянутый пороговый потенциал возбуждения задают равным некоторому опорному напряжению, обеспечивают рост порогового потенциала при увеличении количества возбуждений в единицу времени и его постепенное уменьшение вплоть до опорного напряжения при уменьшении количества возбуждений в единицу времени или при их отсутствии.
10. Способ по п.4, отличающийся тем, что обеспечивают самовозбуждение базового элемента при низком уровне упомянутого порогового потенциала за счет случайных флуктуаций потенциала на его входе с возможностью образования новых связей между базовыми элементами при отсутствии сигналов внешней среды.
| US 5220641 А, 15.06.1993 | |||
| НЕЙРОПОДОБНЫЙ ЭЛЕМЕНТ | 2005 |
|
RU2295769C1 |
| ТЕХНИЧЕСКАЯ НЕРВНАЯ СИСТЕМА | 1997 |
|
RU2128857C1 |
| US 5347613 A, 13.09.1994. | |||

