Изобретение относится к автоматическому управлению и может быть использовано для управления роботами, станками и другим оборудованием, для регулирования технологических процессов.
Известна техническая нервная система [1], включающая источник питающего напряжения постоянного тока, технические органы чувств, состоящие из рецепторов очувствления, и технический мозг в виде матрицы регулируемых резисторных элементов, каждая строчная шина которой соединена с выходом отдельного рецептора очувствления, а столбцовые шины этой матрицы объединены попарно, и каждая пара подсоединена к отдельному сумматору-вычитателю, выходы сумматоров-вычитателей являются выходами системы управления.
Наиболее близким к изобретению техническим решением является техническая нервная система [2], которая включает технические органы чувств (технические глаза, уши, кожу и т.д.), состоящие из рецепторов очувствления, соединенных питающими шинами через распределитель питания рецепторов в виде набора элементов коммутации с первой клеммой источника питающего напряжения, включает технический мозг в виде матрицы регулируемых резисторных элементов, каждая строчная шина которой соединена с выходом отдельного рецептора очувствления, а столбцовые шины которой соединены через нагрузочные резисторы со второй клеммой источника питающего напряжения и объединены попарно, и включает усилители (сумматоры-вычитатели), каждый из которых своими входами соединен с отдельной парой столбцовых шин, выходы одной части усилителей являются выходами системы на исполнительные двигатели объекта управления, выходы другой части усилителей соединены с частью управляющих входов распределителя питания рецепторов, остальные управляющие входы которого подключены к внешним системам управления.
Указанные технические решения имеют недостаточно широкие функциональные возможности, для них характерны длительное обучение решению поставленных задач, недостаточная точность обучения и невозможность самообучения на решение поставленных задач, сложность и громоздкость устройства.
Цель изобретения - расширение функциональных возможностей технической нервной системы, ускорение процесса обучения устройства решению поставленных задач, повышение точности обучения, реализация самообучения устройства, упрощение технической нервной системы.
Поставленная цель достигается тем, что в устройство дополнительно введены распределитель выходных сигналов технического мозга, регулятор мощности питания рецепторов, активное устройство обучения, содержащее соединенные последовательно генератор сигналов обучения, регулятор мощности сигналов обучения и распределитель сигналов обучения, с выходами которого соединены преобразователи проводимостей элементов матрицы технического мозга, в устройство введены также рецепторы выходных сигналов технического мозга, рецепторы внешних систем, рецепторы обучения, рецепторы распределения питания, введены первая группа дополнительных питающих шин рецепторов выходных сигналов технического мозга, вторая группа дополнительных питающих шин рецепторов внешних систем, третья группа дополнительных питающих шин рецепторов обучения, кроме этого в матрицу резисторных элементов технического мозга включены первая группа дополнительных пар столбцовых шин матрицы технического мозга с усилителями для управления распределителем выходных сигналов технического мозга, вторая группа дополнительных пар столбцовых шин с усилителями для управления регулятором мощности питания рецепторов, третья группа дополнительных пар столбцовых шин с усилителями для управления регулятором мощности сигналов обучения и четвертая группа дополнительных пар столбцовых шин с усилителями для управления распределителем сигналов обучения.
Распределитель выходных сигналов технического мозга представляет собой набор элементов коммутации. Информационные входы элементов коммутации соединены с выходами части усилителей выходных сигналов технического мозга, а выходы элементов коммутации соединены с выходами распределителя выходных сигналов технического мозга, которые являются выходами системы на исполнительные двигатели объекта управления. Управляющие входы элементов коммутации распределителя соединены с выходами усилителей выходных сигналов технического мозга первой группы дополнительных пар столбцовых шин, а также подключены к внешним управляющим системам. Введение распределителя выходных сигналов технического мозга расширяет функциональные возможности объекта управления с технической нервной системой за счет увеличения числа решаемых им задач и их усложнения, повышает точность обучения и сокращает продолжительность обучения их решению.
Вход регулятора мощности питания рецепторов соединен с первой клеммой источника постоянного тока, а выход соединен с входом распределителя питания рецепторов. Управляющие входы регулятора мощности соединены с выходами усилителей выходных сигналов технического мозга второй группы дополнительных пар столбцовых шин, а также подключены к внешним управляющим системам. Введение регулятора мощности питания рецепторов позволяет реализовать существование эмоций объекта управления, что расширяет его функциональные возможности и ускоряет процессы обучения и самообучения.
Первая группа дополнительных питающих шин рецепторов соединена со строчными шинами матрицы технического мозга через рецепторы выходных сигналов технического мозга, каждый из которых выполнен в виде электронной схемы, управляющий вход которой соединен с выходом усилителя технического мозга или с выходом распределителя выходных сигналов технического мозга. Наличие рецепторов выходных сигналов технического мозга позволяет реализовать процесс мышления объекта управления, что расширяет его функциональные возможности.
Вторая группа дополнительных питающих шин рецепторов соединена со строчными шинами матрицы технического мозга через рецепторы внешних управляющих систем, каждый из которых выполнен в виде электронной схемы, управляющий вход которой соединен с одним из тех выходов внешних систем управления, которые в свою очередь соединены с управляющими входами регулятора мощности питания рецепторов, с управляющими входами распределителя питания рецепторов, с управляющими входами распределителя выходных сигналов технического мозга, с управляющими входами регулятора мощности сигналов обучения, с управляющими входами распределителя сигналов обучения. Наличие рецепторов внешних систем дает информацию технической нервной системе об управляющих сигналах, подаваемых на ее управляемые внешними системами элементы.
Третья группа дополнительных питающих шин рецепторов соединена со строчными шинами матрицы технического мозга через рецепторы обучения, каждый из которых выполнен в виде электронной схемы, управляющий вход которой соединен с одним из выходов распределителя сигналов обучения. Наличие рецепторов обучения позволяет регулировать и контролировать процесс обучения технической нервной системы.
Питающие шины рецепторов очувствления, рецепторов выходных сигналов технического мозга, рецепторов внешних систем и рецепторов обучения соединены со строчными шинами матрицы технического мозга через рецепторы распределения питания или внимания, каждый из которых выполнен в виде электронной схемы, управляющий вход рецептора распределения питания соединен с его питающей шиной. Наличие рецепторов распределения питания позволяет подстраивать систему, не переобучая ее, и дает информацию технической нервной системе о распределении и мощности питания ее рецепторов.
Выход каждого отдельного из рецепторов очувствления, рецепторов выходных сигналов технического мозга, рецепторов внешних систем, рецепторов обучения и рецепторов распределения питания разделен на множество выходов, соединенных со строчными шинами матрицы технического мозга через блоки задержки, имеющие различные постоянные времени задержки сигнала, а величина тока на выходах отдельного рецептора зависит от значения сигнала, подаваемого на его управляющий вход. Такое исполнение рецепторов технической нервной системы расширяет ее функциональные возможности за счет учета ситуаций, предшествующих текущей, с разной степенью отделения от нее во времени.
Генератор сигналов обучения в виде независимого источника постоянного тока соединен с входом регулятора мощности сигналов обучения. Выход регулятора мощности сигналов обучения соединен с входом распределителя сигналов обучения. Управляющие входы регулятора мощности сигналов обучения соединены с выходами усилителей технического мозга третьей группы дополнительных пар столбцовых шин, а также подключены к внешним управляющим системам. Распределитель сигналов обучения представляет собой набор элементов коммутации. Информационные входы элементов коммутации соединены с выходом регулятора мощности сигналов обучения, а выходы элементов коммутации - с выходами распределителя сигналов обучения. Управляющие входы элементов коммутации распределителя сигналов обучения соединены с выходами усилителей технического мозга четвертой группы дополнительных пар столбцовых шин, а также подключены к внешним управляющим системам. Каждый выход распределителя сигналов обучения соответствует отдельной столбцовой шине матрицы технического мозга и соединен с преобразователями проводимостей резисторных элементов матрицы технического мозга. Преобразователь проводимости включает в себя перемножитель сигнала со строчной шины матрицы мозга и сигнала с выхода распределителя сигналов обучения, а также включает регулятор проводимости резисторного элемента матрицы. Каждый преобразователь проводимости изменяет проводимость отдельного резисторного элемента мозга пропорционально произведению сигнала обучения с выхода распределителя сигналов обучения, соответствующего столбцу матрицы мозга, с которым соединен данный регулируемый резисторный элемент мозга, и сигнала выхода рецептора, соединенного строчной шиной с данным резисторным элементом. Активное устройство обучения позволяет реализовать обучение и самообучение объекта управления решению поставленных перед ним задач.
Технический (электронный) мозг может быть выполнен в виде матрицы резисторных элементов, изменяющих свою проводимость под воздействием электрических импульсов, например, из халькогенидных полупроводников, а генератор сигналов обучения в виде генератора импульсов, выходы распределителя сигналов обучения в этом случае напрямую соединены с соответствующими столбцовыми шинами матрицы мозга, что упрощает устройство технической нервной системы, т. к. регулируемые резисторные элементы технического мозга в этом случае включают в себя и преобразователи проводимостей этих элементов [1], [4], [7] , [9], [10], [11].
На фиг. 1 представлена принципиальная схема технической (электронной) нервной системы. Она содержит источник постоянного тока 1, регулятор мощности питания рецепторов 2, распределитель питания рецепторов 3, питающие шины рецепторов выходных сигналов технического мозга 4, питающие шины рецепторов очувствления 5, питающие шины рецепторов внешних систем 6, питающие шины рецепторов обучения 7, набор рецепторов технической нервной системы 8, состоящий из рецепторов выходных сигналов технического мозга 9, рецепторов очувствления 10, рецепторов внешних управляющих систем 11 и рецепторов обучения 12, рецепторов распределения питания рецепторов 13, технический мозг 14 в виде матрицы регулируемых резисторных элементов (на схеме не показаны), соединяющих через диодные элементы (на схеме не показаны) строчные шины 15 матрицы со столбцовыми шинами 16, усилители выходных сигналов технического мозга 17, распределитель выходных сигналов технического мозга 18, выходы которого 19 являются выходами системы на исполнительные органы объекта управления. Кроме этого, техническая нервная система содержит активное устройство обучения 20, включающее источник питания устройства обучения 21, регулятор мощности сигналов обучения 22, распределитель сигналов обучения 23, выходы которого 24 соответствуют столбцовым шинам матрицы мозга, и преобразователи проводимостей резисторных элементов матрицы мозга (на схеме не показаны). Столбцовые шины 16 матрицы мозга объединены попарно и разделены на группы вместе с соответствующими им усилителями 17: группа пар столбцовых шин 25 с выходами усилителей 26, предназначенная для управления исполнительными органами объекта управления, группа пар столбцовых шин 27 с выходами усилителей 28, предназначенная для управления распределителем 18 выходных сигналов технического мозга, группа пар столбцовых шин 29 с выходами усилителей 30, предназначенная для управления регулятором мощности 2 питания рецепторов, группа пар столбцовых шин 31 с выходами усилителей 32, предназначенная для управления распределителем питания 3 рецепторов, группа пар столбцовых шин 33 с выходами усилителей 34, предназначенная для управления регулятором 22 мощности сигналов обучения, группа пар столбцовых шин 35 с выходами усилителей 36, предназначенная для управления распределителем 23 сигналов обучения. Часть управляющих входов регулятора мощности 2 питания рецепторов, распределителя питания рецепторов 3, распределителя выходных сигналов технического мозга 18, регулятором мощности сигналов обучения 22, распределителя сигналов обучения 23 предназначена для подключения к выходам внешних управляющих систем 37. Рецепторы мозга имеют управляющие входы 38, предназначенные для получения выходных сигналов усилителей мозга и распределителя выходных сигналов мозга. Рецепторы распределения питания имеют управляющие входы 39, предназначенные для получения выходных сигналов распределителя питания рецепторов.
На фиг. 2 показаны технический мозг 14 и активное устройство обучения 20 технической нервной системы, включающее источник питания устройства обучения 21, регулятор мощности сигналов обучения 22, распределитель сигналов обучения 23, выходы которого 24 соответствуют столбцовым шинам матрицы мозга 14. Распределитель 23 содержит электронно-управляемые элементы коммутации 40, управляющие входы которых соединены с выходами 36 усилителей отдельной группы пар 35 (фиг. 1) столбцовых шин технического мозга и управляющими выходами внешних управляющих систем 37. Кроме этого активное устройство обучения включает преобразователи проводимостей 41 резисторных элементов 42 матрицы мозга, соединенных с диодными элементами 43. Каждый из преобразователей проводимостей 41 резисторных элементов мозга 42 содержит перемножитель сигналов 44, входы которого соединены со строчной шиной 15 и выходом 24 распределителя сигналов обучения 23, соответствующего столбцовой шине 15 технического мозга, с которой соединен резисторный элемент 42, проводимость которого регулируется данным преобразователем. Выход перемножителя 44 соединен с регулятором проводимости 45, например электромеханическим, в виде электродвигателя, перемещающего подвижный контакт переменного резистора, электрохимическим в виде гальванического элемента или халькогенидного полупроводника, совмещающего в себе преобразователь проводимости и сам регулируемый резисторный элемент мозга. Столбцовые шины матрицы мозга соединены через нагрузочные резисторы 46 с клеммой источника питания 1 (фиг. 1), а выходы распределителя сигналов обучения соединены через нагрузочные резисторы 47 с клеммой источника питания устройства обучения 21. Диодные элементы 43 установлены таким образом, чтобы пропускать ток через матрицу мозга от одной клеммы источника питания 1 к другой.
На фиг. 3 показан пример выполнения рецепторов выходных сигналов технического мозга, преобразующих выходные сигналы усилителей, соединенных со столбцовыми шинами технического мозга, и выходные сигналы распределителя выходных сигналов технического мозга в выходные сигналы рецепторов, подаваемых на строчные шины 15 мозга. Рецептор имеет вход 48, пару транзисторных элементов p-n-p 49 и n-p-n 50, управляющий вход 38, соединенный с выходом усилителя технического мозга, а также блоки задержки 51, выходы которых 52 являются выходами рецептора. В зависимости от знака сигнала на выходе усилителя открывается один из транзисторных элементов и на строчные шины 15 (фиг. 1, 2) технического мозга, с которыми соединен открытый транзисторный элемент, подается ток одной из питающих шин 4 (фиг. 1), величина которого определяется величиной сигнала, поданного на базу транзисторного элемента. Пример выполнения рецепторов выходных сигналов технического мозга совпадает с примером выполнения рецепторов внешних систем, которые преобразуют управляющие сигналы внешних управляющих систем в выходные сигналы рецепторов, подаваемые на строчные шины технического мозга.
На фиг. 4 показан пример выполнения рецептора очувствления, имеющего вход 53, транзисторный элемент 54 и соответствующий ему чувствительный элемент 55, например фоторезистор, транзисторный элемент 56 и соответствующий ему резисторный элемент 57, блока задержки 58, выходы которых 59 являются выходами рецептора на строчные шины 15 (фиг. 1, 2) технического мозга. Управляющим входом рецептора очувствления является изменение освещенности фоторезистора.
На фиг. 5 показан пример выполнения рецептора обучения, имеющего вход 60, транзисторный элемент 61, управляющий вход 24 и блоки задержки 62, выходы которых являются выходами 63 рецептора на строчные шины 15 (фиг. 1, 2) технического мозга.
На фиг. 6 показан пример выполнения рецептора распределения питания рецепторов, имеющего вход 39, транзисторный элемент 64, блоки задержки 65, выходы которых являются выходами 66 рецептора на строчные шины 15 (фиг. 1, 2) технического мозга. Управляющий вход рецептора распределения питания совпадает с его информационным входом.
На фиг. 7 показан пример выполнения распределителя выходных сигналов технического мозга, содержащий электронно управляемые элементы коммутации 67, имеющие коммутируемые входы 26 и выходы 19 (фиг. 1), и управляющие входы, соединенные с выходами 28 усилителей отдельной группы пар 27 (фиг. 1) столбцовых шин технического мозга и управляющими выходами внешних управляющих систем 37.
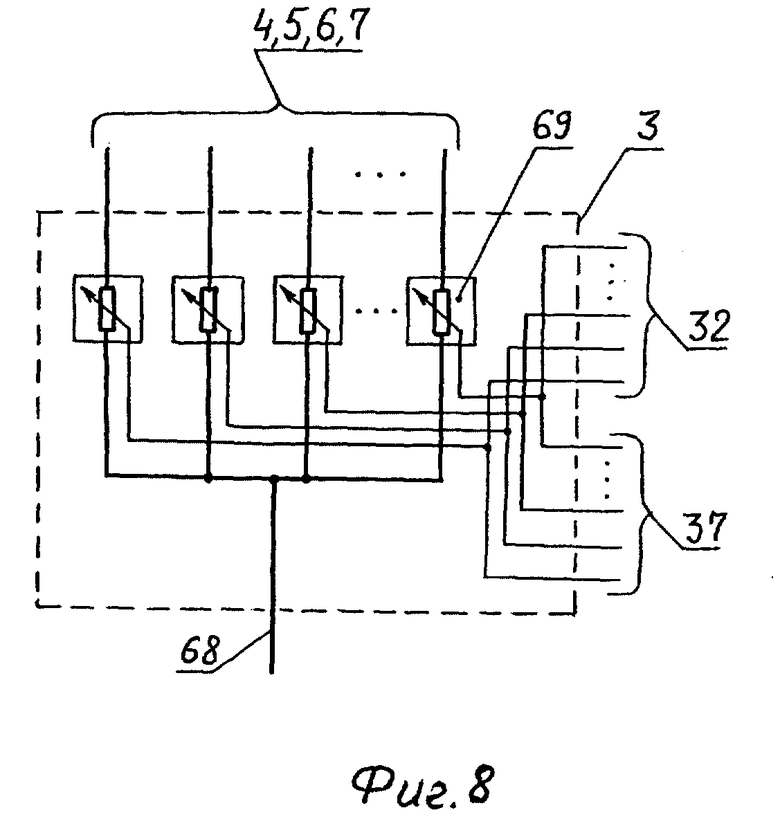
На фиг. 8 показан пример выполнения распределителя питания рецепторов. Распределитель имеет вход 68 и содержит электронно-управляемые элементы коммутации 69, управляющие входы которых соединенные с выходами 32 усилителей отдельной группы пар 31 (фиг. 1) столбцовых шин технического мозга и управляющими выходами внешних управляющих систем 37. Выходы элементов коммутации 69 являются выходами распределителя и соединены с питающими шинами 4, 5, 6, 7 (фиг. 1) рецепторов.
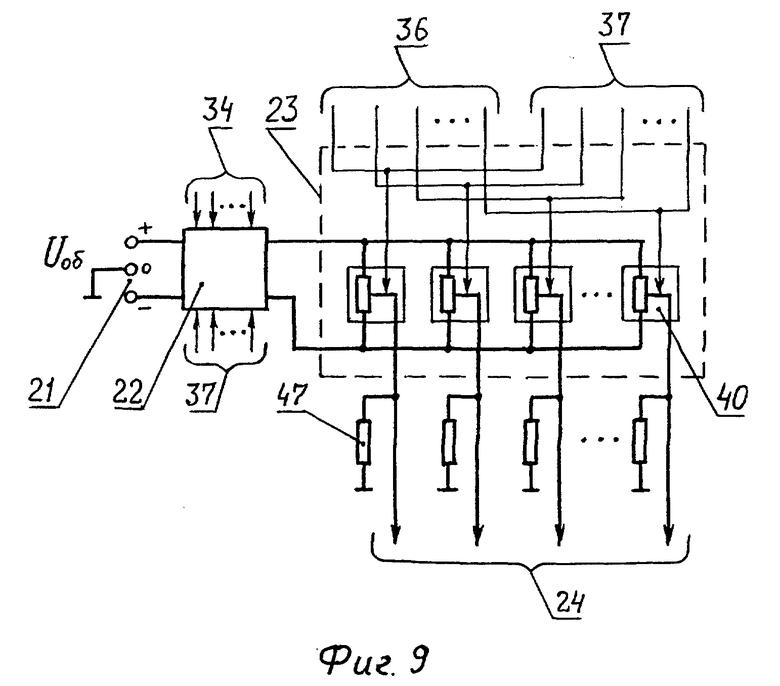
На фиг. 9 показан пример выполнения распределителя сигналов обучения 23 активного устройства обучения в соединении с регулятором мощности 22 и генератором сигналов обучения, выполненным в виде двуполярного источника питания постоянного тока 21. Распределитель содержит электронно-управляемые элементы коммутации 40, входы которых соединены с выходами 36 усилителей отдельной группы пар 35 (фиг. 1) столбцовых шин технического мозга и управляющими выходами внешних управляющих систем 37. Выходы 24 элементов коммутации 40 соединены через резисторы 47 с нулевой клеммой двуполярного источника питания постоянного тока 21 и являются выходами распределителя сигналов обучения.
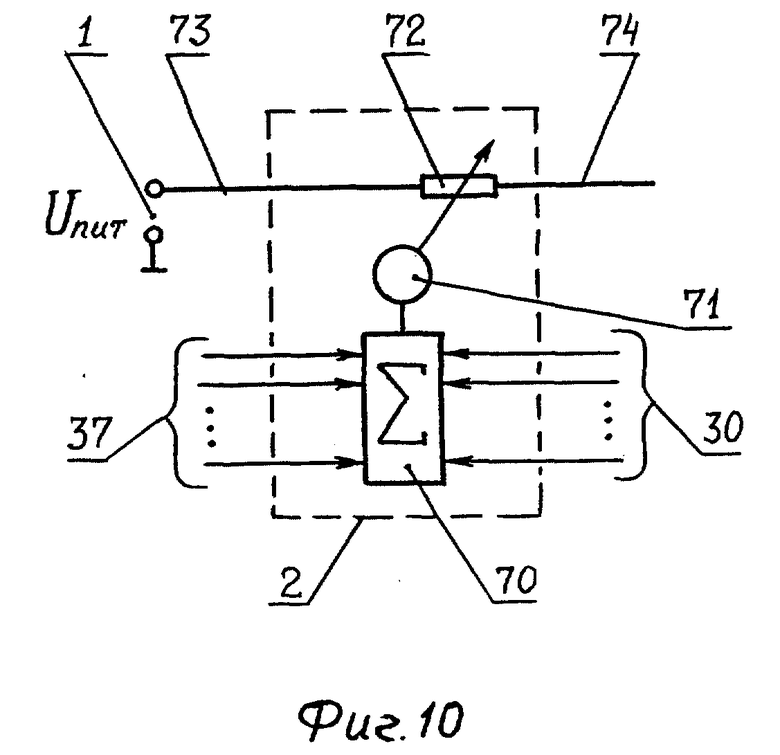
На фиг. 10 показан пример выполнения регулятора мощности питания рецепторов 2, совпадающий с примером выполнения регулятора мощности сигналов обучения. Регулятор содержит сумматор 70 управляющих сигналов выходов 30 усилителей отдельной группы пар 29 (фиг. 1) столбцовых шин матрицы мозга и управляющих сигналов выходов 37 внешних систем, а также регулятор проводимости 71 резистора 72. Один контакт резистора 72 является входом 73 регулятора, соединенным с клеммой источника питания 1, а другой контакт резистора 72 является выходом 74 регулятора мощности.
На схеме указаны обозначения: Uпит - напряжение источника питания рецепторов; Uоб - напряжение источника питания активного устройства обучения; b1, b2, . .., bm - выходные сигналы рецепторов; E1, E2, ..., En - выходные сигналы распределителя выходных сигналов технического мозга.
Одна клемма источника питания 1 постоянного тока соединена со входом 73 регулятора мощности питания 2 рецепторов, выход 74 которого соединен с входом 68 распределителя питания 3 групп рецепторов, представляющего собой набор элементов коммутации 69, соединяющих выход регулятора мощности питания рецепторов с питающими шинами рецепторов выходных сигналов технического мозга 4, питающими шинами рецепторов очувствления 5, питающими шинами рецепторов внешних систем 6, питающими шинами рецепторов обучения 7. Набор рецепторов 8 включает в себя рецепторы выходных сигналов технического мозга 9, рецепторы очувствления 10, которые образуют технические органы чувств, рецепторы управляющих сигналов внешних управляющих систем 11, рецепторы обучения 12 и рецепторы распределения питания 13. Вход 48 каждого рецептора выходных сигналов технического мозга соединен с одной из питающих шин соответствующей группы 4, а каждый из его выходов 52 - с отдельной строчной шиной 15 матрицы технического мозга 14, вход 53 каждого рецептора очувствления соединен с одной из питающих шин соответствующей группы 5, а каждый из его выходов 59 - с отдельной строчной шиной 15 матрицы технического мозга 14, вход 48 каждого рецептора внешних систем соединен с одной из питающих шин соответствующей группы 6, а каждый из его выходов 52 - с отдельной строчной шиной 15 матрицы технического мозга 14, вход 60 каждого рецептора обучения соединен с одной из питающих шин соответствующей группы 7, а каждый из его выходов 63 - с отдельной строчной шиной 15 матрицы технического мозга 14, вход 39 каждого рецептора распределения питания соединен с одной из питающих шин, а каждый из его выходов 66 - с отельной строчной шиной 15 матрицы технического мозга 14. Состояние элементов коммутации 69 распределителя питания 3 рецепторов определяет, какие рецепторы получают более мощное питание, а какие - менее, т.е. определяет концентрацию внимания объекта управления с технической нервной системой на информации, получаемой от рецепторов, имеющих более мощное питание в данный момент.
Управляющий вход 38 каждого из рецепторов выходных сигналов технического мозга соединен с управляющим (открывающим) входом транзисторного элемента 49 и с управляющим (запирающим) входом транзисторного элемента 50, входы которых соединены с одной из питающих шин группы 4, а выход каждого из них разделен на множество выходов с блоками задержки 51, имеющими различные постоянные времени задержки (растягивания) сигнала, и каждый из выходов 52 которых соединен с отдельной строчной шиной 15 матрицы технического мозга.
Аналогичное соединение имеют элементы рецепторов выходных сигналов внешних управляющих систем, вход каждого из которых соединен с одной из питающих шин группы 6, а управляющие входы 39 соединены с выходами внешних управляющих систем.
Рецепторы очувствления образуют технические органы чувств объекта с технической нервной системой. В качестве технических органов чувств могут быть использованы технические глаза, уши, кожа и другие органы в любом соотношении и количестве. Для технического глаза, например, рецептор очувствления содержит чувствительные элементы 55, реагирующие на изменением освещенности изменения электрической проводимости, скажем, фоторезисторы, для технической кожи - переменные резисторы их токопроводящей резины, изменяющие свою проводимость в зависимости от усилия нажатия, для технических ушей - микрофоны с узкой полосой пропускания звуковых частот и т.д. Выход чувствительного элемента соединен с управляющим (открывающим) входом транзисторного элемента 54, вход которого соединен с питающей шиной соответствующей группы 5, а выход разделен на множество выходов с блоками задержки 58, имеющими различные постоянные времени задержки сигнала, и выходы 59 которых соединены со строчными шинами 15 матрицы технического мозга. Резистор 57, соединяющий питающую шину с управляющим входом транзисторного элемента 56, позволяет подавать ток питающей шины на строчные шины мозга при отсутствии внешних воздействий на чувствительный элемент 55. Это означает для фоторезистора, например, отсутствие освещенности. При этом его проводимость стремится к нулю, и ток питающей шины идет через резистор 57.
Управляющий вход 24 каждого из рецепторов обучения соединен с управляющим (открывающим) входом транзисторного элемента 61, вход которого соединен с одной из питающих шин группы 7, а выход которого разделен на множество выходов с блоками задержки 62, имеющими различные постоянные времени задержки сигнала, и каждый из выходов 63 которых соединен с отдельной строчной шиной 15 матрицы технического мозга.
Управляющий вход 39 каждого из рецепторов распределения питания соединен с управляющим (открывающим) входом транзисторного элемента 64, вход которого соединен с одной из питающих шин групп 4, 5, 6, 7, а выход которого разделен на множество выходов с блоками задержки 65, имеющими различные постоянные времени задержки сигнала, и каждый из выходов 66 которых соединен с отдельной строчной шиной 15 матрицы технического мозга.
Технический мозг 14 имеет вид матрицы и является активным преобразователем информации рецепторов, поступающей в виде электрических сигналов с выходов рецепторов через блоки задержки на строчные шины 15 матрицы, в выходные сигналы технического мозга, снимаемые со столбцовых шин 16 матрицы. Каждая строчная шина 15 соединена со всеми столбцовыми шинами 16 матрицы. Каждое соединение с отдельной столбцовой шиной представляет собой последовательно соединенные регулируемый резисторный элемент 42 и диодный элемент 43. Столбцовые шины матрицы технического мозга объединены попарно и соединены со входами двуполярных усилителей 17 выходных сигналов технического мозга, а через нагрузочные резисторы 46 с другой клеммой источника питания рецепторов 1. Одну из пары столбцовых шин можно условно назвать плюс-столбцом, а другую - минус-столбцом. Число пар столбцовых шин технического мозга может быть намного больше числа исполнительных двигателей объекта управления и определяется количеством и сложностью решаемых им задач и требуемой надежностью технической нервной системы, т.е. для параллельного и (или) поочередного управления одним исполнительным двигателем может быть выделено несколько пар столбцовых шин матрицы мозга.
Выходы 28 двуполярных усилителей 17 выходных сигналов технического мозга соединены с управляющими входами элементов коммутации 67 распределителя выходных сигналов усилителей технического мозга 18, а выходы элементов коммутации 67 соединены с выходами распределителя 19. Выходы 19 распределителя выходных сигналов усилителей технического мозга являются выходами технической нервной системы на исполнительные органы объекта управления. Состояние элементов коммутации 67 распределителя выходных сигналов 18 определяет какие пары столбцовых шин матрицы технического мозга участвуют в управлении объектом с технической нервной системой при решении текущей задачи. При переходе к решению других задачи соответствующим образом изменяется состояние элементов коммутации 67 (включен-выключен), соединяя при этом с выходами распределителя 18 другие пары столбцовых шин, элементы матрицы которых участвовали в обучении решению этой задачи.
Техническая нервная система содержит активное устройство обучения 20. Оно включает генератор сигналов обучения 21, представляющий собой источник питания устройства обучения постоянного тока, одна клемма которого соединена со входом регулятора мощности сигналов обучения 22. Выход регулятора 22 соединен со входами элементов коммутации 40 распределителя сигналов обучения 23. Выходы 24 элементов коммутации являются выходами распределителя сигналов обучения 23, которые соответствуют столбцовым шинам матрицы технического мозга и соединены с преобразователями 41 сигналов обучения в изменение проводимости регулируемых резисторных элементов 42 матрицы мозга. Каждый преобразователь 41 соответствует отдельному резисторному элементу 42 матрицы и содержит перемножитель сигналов 44; сигнала от строчной шины, соединенной с данным резисторным элементом и сигнала обучения от выхода распределителя сигналов обучения 23, соответствующего той столбцовой шине матрицы, с которой соединен данный регулируемый элемент 42. Выход перемножителя 44 соединен с управляющим входом регулятора проводимости 45 резисторного элемента 42 матрицы мозга, изменяющего его проводимость пропорционально управляющему сигналу. В качестве таких регуляторов проводимости могут быт использованы электромеханические, электрохимические, электронные и другие преобразователи. Выходы 24 распределителя сигналов обучения 23 соединены также через нагрузочные резисторы 47 с другой клеммой источника питания 21 устройства обучения 20. Состояние элементов коммутации 40 распределителя сигналов обучения 23 (включен-выключен) определяет какие столбцовые шины и соответствующие им регулируемые резисторные элементы 42 матрицы технического мозга участвуют в обучении объекта с технической нервной системой решению текущей задачи. При переходе к обучению решению другой задачи соответствующим образом изменяется состояние элементов коммутации 40, включая в обучение другие пары столбцовых шин и соответствующие им резисторные элементы 42 матрицы мозга.
Выходы всех усилителей 17 выходных сигналов технического мозга и выходы распределителя выходных сигналов 18 технического мозга соединены с управляющими входами рецепторов 9 выходных сигналов технического мозга, одновременно выходы усилителей группы пар столбцовых шин 29 соединены с управляющими входами 30 регулятора мощности 2 питания рецепторов, выходы усилителей группы пар столбцовых шин 31 соединены с управляющими входами 32 распределителя питания 3 рецепторов, выходы усилителей группы пар столбцовых шин 33 соединены с управляющими входами 34 регулятора мощности 22 сигналов обучения, выходы усилителей группы пар столбцовых шин 35 соединены с управляющими входами 36 распределителя сигналов обучения, выходы усилителей группы пар столбцовых шин 27 соединены с управляющими входами распределителя выходных сигналов усилителей технического мозга. Кроме этого, управляющие входы регулятора мощности питания рецепторов, распределителя питания рецепторов, регулятора мощности сигналов обучения, распределителя сигналов обучения, распределителя выходных сигналов усилителей технического мозга подключены к выходам 37 внешних управляющих систем, и которые в свою очередь соединены с управляющими входами рецепторов внешних систем. Распределитель выходных сигналов технического мозга, распределитель питания рецепторов и распределитель сигналов обучения могут включать в себя как электронно-управляемые элементы коммутации, так и элементы коммутации, переключаемые механически, например вручную, человеком, которого в этом случае можно рассматривать как внешнюю управляющую систему. Элементы коммутации распределителя выходных сигналов технического мозга, распределителя питания рецепторов и распределителя сигналов обучения могут быть выполнены в виде регуляторов, плавно изменяющих проводимость резисторного элемента, соединяющего вход и выход элемента коммутации, от нуля до бесконечности в зависимости от величины сигнала управления, полученного с выхода усилителя технического мозга или от внешней управляющей системы.
Генератор сигналов обучения может быть выполнен в виде двуполярного источника питания постоянного тока 21 (фиг. 9), что позволит изменять проводимость резисторных элементов мозга 42 как в сторону увеличения, так и в сторону уменьшения. Это расширяет диапазон изменения проводимостей резисторных элементов мозга при обучении и позволяет избежать возможности выхода проводимостей всех резисторных элементов на максимальный уровень, что делает невозможным дальнейшее обучение. Пример выполнения рецепторов обучения в этом случае совпадает с примером выполнения рецепторов выходных сигналов мозга и рецепторов внешних систем.
Значения выходных сигналов рецепторов можно назвать ощущениями. Если они вызваны внешними факторами - это внешние ощущения. К ним можно отнести ощущения холода, тепла, света, управляющие сигналы внешних систем и т.д., т.е. значения выходных сигналов рецепторов очувствления, а также рецепторов внешних управляющих систем. Ощущения системой самой себя, внутренние ощущения - это значения выходных сигналов технического мозга и распределителя выходных сигналов технического мозга, выведенные через рецепторы выходных сигналов технического мозга на строчные шины матрицы мозга, а также значения выходных сигналов рецепторов распределения питания и рецепторов обучения.
Технические нервные системы оперируют не параметрической информацией, определяющей воспринимаемое системой очувствления внешнее воздействие (образ), а с признаковой: для них не имеет значения какой параметр и в каком диапазоне отражает отдельный рецептор: температуру, освещенность или давление, не имеет значения и нелинейность отражения параметра сигналом на выходе рецептора, важно только значение этого сигнала в каждой ситуации. Для технической нервной системы желательна избыточность информации, т.е. рецепторы могут многократно дублировать и перекрывать отражаемые ими диапазоны параметров. Предлагаемое устройство обладает свойствами обратимости - характеристики рецепторов могут быть неодинаковыми, например рецепторы сетчатки технического глаза могут по-разному реагировать на одинаковую освещенность, их расположение в сетчатке и соединение их выходов со строчными шинами технического мозга может быть хаотичным, поскольку они участвуют как в обучении, так и в работе системы. Далее, управление объектом с технической нервной системой происходит в моторном пространстве, которое в отличие от геометрического трехмерного пространства имеет столько же координат, сколько исполнительных двигателей у объекта управления, и координатами являются сигналы управления этими двигателями. Управление объектом осуществляется в зависимости от текущей ситуации и не зависит от времени, хотя датчики времени могут быть включены в систему очувствления, как один из рецепторов очувствления, и их показания будут учитываться при обучении и работе объекта управления.
Предлагаемое устройство подсоединяется к объекту управления, например роботу, т.е. выходы распределителя выходных сигналов усилителей технического мозга соединяются с управляющими входами исполнительных двигателей объекта управления, и включается напряжение Uпит источника питания 1. Электрический ток идет от одной клеммы источника питания 1 на вход 73 регулятора мощности 2, идет через регулируемый резистор 72 и через выход 74 подается на вход 68 распределителя 3 питания рецепторов. Сопротивление резистора 72 устанавливается регулятором 71. В качестве регулятора может использоваться электродвигатель, регулируемый по скорости и перемещающий подвижный контакт резистора в зависимости от выходного сигнала сумматора 70, суммирующего сигналы 30 усилителей отдельной группы 29 пар столбцовых шин матрицы мозга и сигналы 37 внешних управляющих систем. Далее, ток идет через элементы коммутации 69 распределителя питания 3 рецепторов на питающие шины 4, 5, 6, 7 групп рецепторов. Состояние элементов коммутации 69, т.е. значения их проводимостей, распределителя питания 3 рецепторов определяется управляющими сигналами выходов 32 усилителей отдельной группы 31 пар столбцовых шин матрицы мозга и сигналами 37 внешних управляющих систем. От значения проводимостей элементов коммутации 69 распределителя питания 3 рецепторов зависит величина тока питающих шин 4, 5, 6 и 7, что определяет концентрацию внимания объекта управления на информации, получаемой от определенных групп рецепторов. Разделение питания рецепторов может осуществляться по типам рецепторов: очувствления, мозга, внешних систем, обучения и распределения питания (внимания); по функциональному назначению: слуховые, зрения, тактильные и другие; по месту расположения и т. д. Ток питающих шин 4 проходит через транзисторные элементов 49, 50 и блоки задержки 51 рецепторов мозга 9, через выходы 52 которых подается на строчные шины 15 матрицы мозга. Величина тока на выходах отдельного рецептора мозга зависит от тока, поданного на вход 48 рецептора, и сигнала, поданного на управляющий вход 38 рецептора с выхода отдельного усилителя технического мозга 17 или с отдельного выхода распределителя 18 выходных сигналов мозга. Ток питающих шин 5 проходит через транзисторные элементы 54, 56 и блоки задержки 59 рецепторов очувствления 10, через выходы 59 которых подается на строчные шины 15 матрицы мозга. Величина тока на выходах отдельного рецептора очувствления зависит от тока, поданного на вход 53 рецептора и от значения проводимостей резистора 57 и чувствительного элемента 55, проводимость которого определяется внешним действием на него. Причем при освещении фоторезистора его проводимость возрастает, и ток подается на строчные шины 15 матрицы, соединенные с транзисторным элементом 54, а при затемнении проводимость фоторезистора стремится к нулю, и ток через резистор 57 идет на другие строчные шины 15, соединенные с транзисторным элементом 56. Ток питающих шин 6 проходит через транзисторные элементы 49, 50 и блоки задержки 51 рецепторов внешних систем 11, через выходы 52 которые подается на строчные шины 15 матрицы мозга. Величина тока на выходах отдельного рецептора внешних систем зависит от тока, поданного на вход 48 рецептора, и сигнала, поданного на управляющий вход 38 рецептора с выхода внешней управляющей системы. Ток питающих шин 7 проходит через транзисторные элементы 61 и блоки задержки 62 рецепторов обучения 12, через выходы 63 которых подается на строчные шины 15 матрицы мозга. Величина тока на выходах отдельного рецептора обучения зависит от тока, поданного на вход 60 рецептора, и сигнала, поданного на управляющий вход 24 рецептора с отдельного выхода распределителя сигналов обучения 23. Ток всех питающих шин 4, 5, 6 и 7 проходит через транзисторные элементы 64 и блоки задержки 65 рецепторов распределения питания 13, через выходы 66 которых подается на строчные шины 15 матрицы мозга. Величина тока на выходах отдельного рецептора распределения питания зависит от сигнала, поданного на вход 39 рецептора с выхода распределителя питания рецепторов 3. Разделение выхода каждого рецептора очувствления, выходных сигналов технического мозга, внешних систем, обучения и распределения питания на множество выходов повышает надежность технической нервной системы, а наличие блоков задержки на выходах рецепторов позволяет в каждый момент времени получать не только текущую информацию, но и ту, которая ей предшествовала, что позволит, например, воспринимать набор звуков, растянутых во времени, как одно слово или предложение. Блоки задержки рецепторов реализуют функцию рецепторной памяти, которая позволяет учитывать динамику движения при обучения объекта и при его работе. Далее, ток проходит через диодные элементы 43 и резисторные элементы 42 матрицы, с проводимостями и Ci, идет по столбцовым шинам 16 и через нагрузочные резисторы 46 выходит на вторую клемму источника питающего напряжения 1. На парных столбцовых шинах возникает разность потенциалов, которая усиливается двуполярными усилителями 17 (1)
(1)
где m - число выходов рецепторов системы (число строчных шин технического мозга);
kу - коэффициент усиления усилителя 17.
Сигналы с выходов усилителей подаются на распределитель 18 выходных сигналов технического мозга, выходы которого 19 являются выходами системы, а выходные сигналы являются управляющими для исполнительных двигателей объекта управления. Движения исполнительных органов или реакции объекта управления, определяемые управляющими сигналами, формируют поведение объекта управления. Из формулы (1) и схемы технической нервной системы следует, что управление объектом такой системой осуществляется практически в реальном времени и определяется только инерционностью рецепторов, т.к. сигналы с выходов рецепторов с задержками, стремящимися к нулю, мгновенно формируют сигналы управления на выходах технического мозга, а сигналы с выходов рецепторов с ненулевыми задержками позволяют учитывать при формировании сигналов управления ситуации, предшествующие текущей, причем с разным временем отдаления от нее. Таким образом в управлении объектом учитывается динамика изменения ситуаций. Поскольку возбуждения рецепторов изменяются не мгновенно, и не мгновенно изменяется воспринимаемая рецепторами ситуация, то и выходные сигналы технической нервной системы изменяются плавно, т.е. объект управления с технической нервной системой характеризуется плавной динамикой его движений.
Сигналы выходов усилителей 17 отдельной группы 27 столбцовых шин матрицы технического мозга идут на управляющие входы 28 распределителя 19 выходных сигналов технического мозга, сигналы выходов усилителей 17 отдельной группы 29 столбцовых шин матрицы технического мозга идут на управляющие входы 30 регулятора мощности питания рецепторов 2, сигналы выходов усилителей 17 отдельной группы 31 столбцовых шин матрицы технического мозга идут на управляющие входы 32 распределителя питания рецепторов 3, сигналы выходов усилителей 17 отдельной группы 33 столбцовых шин матрицы технического мозга идут на управляющие входы 34 регулятора мощности сигналов обучения 22, сигналы выходов усилителей 17 отельной группы 35 столбцовых шин матрицы технического мозга идут на управляющие входы 36 распределителя сигналов обучения 23. Одновременно, на управляющие входы 37 распределителя выходных сигналов технического мозга, регулятора мощности питания рецепторов, распределителя питания рецепторов, регулятора мощности сигналов обучения и распределителя сигналов обучения приходят управляющие сигналы внешних управляющих систем. Управляющие сигналы усилителей технического мозга и внешних управляющих систем определяют состояние элементов коммутации распределителей питания и обучения и мощность питания рецепторов и сигналов обучения. Все это влияет на значения выходных сигналов управления технической нервной системы, определяя поведение объекта управления, оснащенного данной системой.
Прежде чем включить техническую нервную систему в работу, ее необходимо подготовить, обучить предварительным установочным навыкам, т.е. настроить регулируемые резисторные элементы технического мозга таким образом, чтобы обеспечить выполнение объектом управления поставленных перед ним задач. При этом методы обучения могут быть различными: динамическое, когда обучение ведется без отключения выходов технической нервной системы от исполнительных двигателей объекта управления, а сигналы обучения, изменяющие проводимости элементов мозга, подаются во время движения объекта управления, и статическое обучение, с отключением выходов системы от исполнительных двигателей, правильность которого определяется по величинам сигналов управления, измеряемых приборами. Обучение может быть пассивным типа многократного циклического "вождения за руку", когда для обучения используются все возникающие при работе объекта ситуации, или активным, когда обучение ведется в некоторых наиболее характерных для данной задачи ситуациях, составляющих обучаемую выборку. Ситуация для технической нервной системы определяется набором сигналов, подающихся на строчные шины технического мозга в данный момент. Скорость обучения зависит от правильности выбора ситуаций в обучаемую выборку и от порядка чередования ситуаций при обучении. Обучение можно ускорить, если на каждом шаге обучения определять ситуацию, в которой отношение отклонения сигнала управления к допустимому отклонению этого сигнала в данной ситуации было наибольшим, и проводить очередную корректировку проводимостей элементов матрицы технического мозга именно в этой ситуации.
Для успешного обучения объекта управления выполнению поставленных задач необходимы достаточность информации и непротиворечивость обучения. Противоречивость обучения заключается в задании таких сигналов на выходах мозга в ситуациях обучаемой выборки, которые не могут быть сформированы одним и тем же набором проводимостей резисторных элементов технического мозга. Примером противоречивого обучения можно считать требование разных сигналов на выходах мозга в одной и той же ситуации, определяемой набором выходных сигналов рецепторов, подаваемых на строчные шины матрицы технического мозга.
Процесс обучения, заключающийся в формировании проводимостей регулируемых резисторных элементов мозга, аналогичен формированию условных рефлексов в живой природе. Если в какой-либо ситуации сигнал управления отдельным исполнительным органом не удовлетворяет обучателя, он через активное устройство обучения подает обучающий сигнал на соответствующий столбец матрицы технического мозга. Это можно осуществить, например, нажимая кнопку из токопроводящей резины, в виде которой выполнен элемент коммутации распределителя сигналов обучения. Чем сильнее усилие нажатия кнопки, тем больше значение обучающего сигнала, подаваемого на соответствующие преобразователи проводимостей резисторных элементов. При этом может исказиться сигнал управления данным исполнительным органом в другой ситуации. Его аналогично корректируют до требуемой величины. Затем переходят к следующей ситуации, соответствующей очередному шагу обучения. Проведя обучение во всех ситуациях обучаемой выборки, снова возвращаются к первой и т.д. На каждом шаге обучения происходит изменение проводимости Δci каждого i-го элемента матрицы мозга, соединенного со столбцом матрицы пропорционально сигналу, поданному на строчную шину bi, и сигналу обучения на выходе распределителя сигналов обучения, который соответствует данной столбцовой шине: (2)
(2)
где ΔE - величина отклонения сигнала от требуемого значения;
K - коэффициент пропорциональности, если K>1 - переобучение, если K<1 - недообучение, если K=1, сигнал управления равен требуемому.
До начала обучения проводимость резисторных элементов матрицы мозга равна нулю или имеет минимальное значение. Процесс обучения продолжают до тех пор, пока не получат требуемые сигналы управления всеми исполнительными двигателями во всех ситуациях обучаемой выборки. При достижении заданных величин сигналов управления в ситуациях обучаемой выборки обучение заканчивается.
Часть резисторных элементов матрицы технического мозга может быть отключена от устройства обучения, значения их проводимостей устанавливаются неизменными для данного объекта управления. Поведение объекта, или реакции, которые определяют такие элементы, соответствуют безусловным рефлексам в живой природе и являются необходимым условием для самообучения.
Для реализации обучения и самообучения объекта с технической нервной системой служит активное устройство обучения 20. В процессе обучения ток идет от одной клеммы источника питания 21, через регулятор мощности 22 сигналов обучения подается на вход распределителя 23 сигналов обучения. Величина тока, проходящего через регулятор мощности, зависит от сигналов 34 усилителей отдельной группы 33 пар столбцовых шин матрицы мозга и сигналов 37 внешних управляющих систем. Далее, ток идет через элементы коммутации 40 распределителя 23 сигналов обучения на выходы 24 и через резисторы 47 возвращается на вторую клемму источника питания 21.
Ток на выходах 24 распределителя сигналов обучения зависит от проводимостей элементов коммутации 40, которые определяются управляющими сигналами 36 усилителей отдельной группы 35 столбцовых шин матрицы технического мозга (при самообучении) и управляющими сигналами 37 внешних управляющих систем (при наличии внешнего обучателя, например человека). Если управляющих сигналов нет, проводимости элементов коммутации равны нулю, сигналы на выходах 24 распределителя 23 сигналов обучения также равны нулю, и обучения системы не происходит. При появлении сигнала на управляющем входе одного из элементов коммутации его проводимость увеличивается, и сигнал обучения проходит на один из выходов распределителя и далее - на преобразователи проводимостей 41 резисторных элементов матрицы мозга, соединенных с этим выходом. В каждом преобразователе сигнал обучения идет на один из входов перемножителя 44 сигналов, на другой вход которого по строчной шине матрицы мозга подается сигнал выхода рецептора. Сигнал с выхода перемножителя, равный произведению входных сигналов, идет на управляющий вход регулятора проводимости 45, изменяющего проводимость соответствующего резисторного элемента 42 пропорционально управляющему сигналу. Изменение проводимостей резисторных элементов матрицы мозга приводит к изменению выходных сигналов усилителей 17 мозга и распределителя выходных сигналов технического мозга, что определяет изменение поведения объекта управления в соответствии с целью обучения.
Рассмотрим процесс обучения и работы технической нервной системы на конкретном примере. Допустим, объект управления - робот, оснащенный технической нервной системой в виде технического глаза, совмещенного со схватом, имеет три степени подвижности с соответствующими исполнительными органами, оснащенными исполнительными двигателями, регулируемыми по скорости, т.е. скорость вращения двигателя пропорциональна сигналу управления на соответствующем выходе распределителя выходных сигналов технического мозга. Робот необходимо обучить поиску темных предметов на светлом фоне, используя несколько наиболее типичных ситуаций в обучаемой выборке, в которых определены требуемые сигналы управления каждым исполнительным органом, включая целевые ситуации, в которых сигнал управления отдельным двигателем равен нулю. При этом можно использовать т.н. обобщенные ситуации, т.е. ситуации не конкретных зрительных сцен, а включающих несколько или целый класс ситуаций [8]. Задача поиска - основная задача технических нервных систем, практически любую сложную задачу можно разложить на ряд элементарных задач поиска. Под решением задачи поиска отдельного исполнительного двигателя понимается стремление объекта управления к такой ситуации, когда сигнал управления этим двигателем равен нулю.
Перед началом обучения определяют ситуации обучаемой выборки для каждой отдельной задачи, под которой понимается поиск одного из заданных предметов, а также определяют те пары столбцовых шин технического мозга, выходные сигналы которых будут использованы при решении каждой из задач. Именно эти пары столбцовых шин должны быть использованы и при обучении. Целевой ситуацией для задачи поиска является такая ситуация, когда глаз видит искомый предмет в заданном положении, сигналы управления двигателями при этом должны быть равны нулю. Другими ситуациями обучаемой выборки могут быть такие, когда искомый предмет находится в поле зрения робота, но смещен относительно целевой ситуации или повернут вокруг своей оси, а также ситуация, когда предмета нет в поле зрения. Для каждой ситуации обучаемой выборки определяются значения сигналов управления исполнительными двигателями и производится обучение решению каждой из задач, т.е. формирование проводимостей регулируемых резисторных элементов технического мозга, соединенных с теми столбцовыми шинами матрицы, которые были выбраны для данной задачи.
Далее выбирают отдельные пары столбцовых шин для обучения переключению элементов коммутации распределителя выходных сигналов усилителей технического мозга таки образом, чтобы при выполнении одной задачи выходы распределителя переключались на другие столбцовые шины, соответствующие решению другой задачи. Такое переключение должно осуществляться в целевой ситуации, т.е. выходной сигнал переключающей пары столбцовых шин в этой ситуации должен превышать порог срабатывания элемента коммутации, во всех остальных ситуациях он должен быть меньше порогового значения. Обучение переключению элементов коммутации осуществляют аналогично обучению управлению исполнительными двигателями робота.
Часть пар столбцовых шин выделяется для управления переключением элементов коммутации распределителя сигналов обучения. Обучение их заключается в том, чтобы при выходе сигналов управления исполнительными двигателями за пределы допустимых значений переключать элементы коммутации распределителя сигналов обучения, соединяя регулятор мощности с тем выходом распределителя, который соответствует той столбцовой шине, увеличение проводимостей элементов которой позволяет довести сигнал управления исполнительным двигателем в данной ситуации до требуемого значения. При этом часть пар столбцовых шин выделяется для управления регулятором мощности сигналов обучения, которые обучаются регулировать мощность сигналов обучения в зависимости от величины отклонения сигналов управления исполнительным органом от требуемого значения в некоторой ситуации. Информация о величинах управляющих сигналов подается на строчные шины матрицы мозга через рецепторы выходных сигналов мозга.
Часть пар столбцовых шин выделяется для управления регулятором мощности питания рецепторов и обучаются повышать ее, например, при обучении, что позволяет ускорить процесс. Информация об управляющих сигналах, подаваемых на распределитель сигналов обучения, также подается на строчные шины матрицы мозга через рецепторы выходных сигналов мозга и говорит о наличии или отсутствии процесса обучения. Информация о распределении и мощности сигналов обучения подается на строчные шины матрицы мозга через рецепторы обучения. Информация о распределении и мощности питания рецепторов подается на строчные шины матрицы мозга через рецепторы распределения питания.
Переключение элементов коммутации распределителя выходных сигналов усилителей технического мозга, элементов коммутации распределителя сигналов обучения, элементов коммутации распределителя питания рецепторов, управление регулятором мощности питания рецепторов, управление регулятором мощности сигналов обучения, переключение элементов коммутации рецепторов распределения питания осуществляется также управляющими сигналами внешних систем, например системами числового программного управления взаимодействующего с роботом оборудования - станков или других роботов, управляющих компьютерных систем, возможно и ручное переключение человеком. Информация об управляющих сигналах внешних систем подается на строчные шины матрицы технического мозга через рецепторы внешних систем и позволяет устанавливать взаимодействие робота с технической нервной системой с другим оборудованием, определяя какое управляющее воздействие и от какого оборудования осуществляется в данный момент. Эта информация, в частности, может преобразовываться в выходные сигналы управления, переключающие систему на выполнение соответствующих задач.
Разделение выхода каждого из рецепторов очувствления, рецепторов выходных сигналов технического мозга, рецепторов внешних систем, рецепторов обучения, рецепторов распределения питания на множество выходов с блоками задержки сигналов, время задержки у которых различное и находится в широких пределах, позволяет учитывать при обучении и в работе не только текущую информацию, но и предшествовавшую ей, т.е. позволяет учитывать скорости движений объекта управления и внешних объектов, а также их производные [4].
Таким образом, число искомых предметов, точнее число решаемых задач при использовании предлагаемого изобретения может быть расширено не только за счет количества групп рецепторов, но и за счет использования различных пар столбцов технического мозга при обучении: при поиске одного предмета исполнительными двигателями управляют те пары столбцов, которые обучались для поиска этого предмета, а при переходе к поиску следующего предмета управление двигателями переключается на другие пары столбцов, резисторные элементы которых обучены этому поиску. Таким образом, технический мозг делится на участки пар столбцовых шин, соответствующие различным задачам. Переключение осуществляется распределителем выходов мозга под воздействием управляющего сигнала от выходов мозга или от внешних систем. Переключение объекта с технической нервной системой с решения одной задачи на решение другой возможно внешним воздействием на рецепторы очувствления, например, звуковыми приказами, которые формируют сигналы выходов технического мозга, переключающие питание на те группы рецепторов и переключают элементы коммутации распределителя выходов мозга на те, которые обучались решению данной задачи. Переключение с решения одной задачи на решение другой может происходить и в результате внутреннего процесса, когда выходные переключающие сигналы мозга формируются рецепторами выходных сигналов технического мозга, а также при совместном воздействии сигналов от всех рецепторов.
Некоторые пары столбцов могут быть обучены управлению исполнительными двигателями только в зависимости от сигналов, полученных от рецепторов выходных сигналов технического мозга. Они могут быть использованы для выполнения некоторых автоматических движений без учета состояния внешней среды, например для возвращения исполнительных органов объекта управления в исходное состояние после выполнения задачи поиска.
Для управления одним исполнительным двигателем может использоваться множество выходов технического мозга одновременно, т.е. реализовываться параллельное управление. Это повышает надежность работы технической нервной системы, т.к. потеря некоторого числа выходов технического мозга в результате, например, обрыва проводов не приведет к выходу ее из строя, а только снизит точность поведения объекта, которую можно снова повысить за счет дообучения оставшихся выходов мозга, соединенных с данным исполнительным органом. Выходной сигнал на исполнительный орган при параллельном управлении определяется формулой
где Eр - результирующий сигнал управления одним исполнительным двигателем;
El - сигнал выхода одного l-го усилителя из выделенных для управления данным исполнительным двигателем;
L - число выходов мозга на данный исполнительный двигатель.
Для повышения мобильности и автономности объекта с технической нервной системой источник питания групп рецепторов и источник питания активного устройства обучения могут быть выполнены в виде аккомуляторов. Тогда их разрядка в процессе управления будет означать усталость объекта с технической нервной системой, а их подзарядка при том, что элементы коммутации распределителя выходных сигналов технического мозга находятся в состоянии "выключены", аналогично процессу сна. При этом элементы коммутации распределителя питания рецепторов также находятся в состоянии "выключен" или проводимость их значительно снижена для избежания потерь электроэнергии. Неполное отключение питания рецепторов может быть необходимо для того, чтобы при возникновении некоторой внешней ситуации, например при определенном звуковом сигнале, объект с технической нервной системой мог самостоятельно выйти из состояния сна в состояние бодрствования, т.е. отключить аккомуляторы от заряжающего устройства и переключаться на нормальное питание рецепторов. Следует заметить, что, пока объект с технической нервной системой находится в состоянии сна, через рецепторы идет некоторый ток, который приводит к формированию выходных сигналов технического мозга, идущих на управляющие входы рецепторов мозга, что дает объекту ощущение наличия внешнего воздействия и движений его исполнительных органов. Такие ощущения являются аналогом сновидений.
Сформированные проводимости резисторных элементов технического мозга отражают все ситуации, использованные в обучаемой выборке, т.е. в технических нервных системах нет блока памяти в виде пространственного накопителя информации, в котором бы хранилась информация о каждой отдельной ситуации обучаемой выборки. Память в технических нервных системах - это функция технического мозга, способность формировать требуемые сигналы управления в определенных ситуациях. При этом отсутствует процедура распознавания ситуаций, как предварительная процедура перед формированием правильного сигнала управления. Память технических нервных систем - распределенная. Каждый резисторный элемент матрицы мозга определяет долю сигнала с соответствующего выхода рецептора в формировании сигнала управления отдельного столбца матрицы мозга для данной ситуации. При достаточной избыточности рецепторов очувствления потеря части элементов мозга не скажется на работоспособности системы, а при выходе сигнала управления за пределы допустимого может быть компенсирована дообучением.
Целевые ситуации могут быть различными для разных исполнительных органов. Может быть несколько целевых ситуаций для одного исполнительного органа. Рассмотрим такой пример для того же робота. Допустим, для двигателя, смещающего глаз вдоль продольного направления, существуют две целевые ситуации: когда в поле зрения находится правильно ориентированная авторучка и когда в поле зрения находится правильно ориентированный карандаш, и если робот достигает одну из этих двух ситуаций, срабатывает схват, совмещенный с техническим глазом. Далее, для двигателя, смещающего схват в поперечном направлении, вид авторучки, удерживаемой схватом, формирует возбуждения рецепторов, которые в сочетании с сигналом управления схватом, выведенным через рецепторы мозга на строчные шины матрицы мозга и заставляющим схват удерживать предмет, формируют сигнал управления, который перемещает робот влево, а вид карандаша и того же сигнала на схват, заставляет двигаться вправо. Т. е. выполняется задача сортировки предметов. При этом ни образа авторучки, ни образа карандаша нигде в технической нервной системе не хранится, и не происходит акта распознавания перед подачей сигнала управления на движение вправо или влево. Просто, сами образы авторучки и карандаша, воспринимаемые рецепторами очувствления и преобразованные техническим мозгом в сигналы управления, управляют правильно обученным роботом. Таким образом, распознавание тех или иных предметов является результатом действий робота с технической нервной системой по их сортировке, а не наоборот.
В процессе эксплуатации точность работы технической нервной системы может снижаться в результате, например, выхода из строя части рецепторов или элементов мозга, т. е. значения сигналов управления начинают выходить за пределы допустимых в некоторых ситуациях, однако система не выходит из строя, такую систему можно дообучить до требуемой точности, повторив те же операции, что и при обучении. Можно также подстроить систему, используя рецепторы распределения питания. Для этого корректируют проводимости соответствующих им резисторных элементов, соединенных с плюс- или минус-столбцом матрицы до тех пор, пока сигналы управления не войдут в пределы допустимых значений [6].
Обучатель может заранее обучить некоторые пары столбцов технического мозга контролировать работу остальных и при необходимости дообучать их, формируя управляющий сигнал на активное устройство обучения. Например, во время сортировки карандашей и авторучек снижается точность. Это означает, что скорость движения, определяемая величиной сигнала управления соответствующего выхода распределителя выходных сигналов технического мозга, становится ниже допустимой. Данный сигнал выводится и на распределитель сигналов обучения, и при достижении им предельно допустимого значения срабатывает элемент коммутации распределителя, соединяющий генератор сигналов обучения с преобразователями проводимостей элементов технического мозга соответствующей столбцовой шины, а также повышается мощность питания рецепторов и сигналов обучения. Это приводит к повышению проводимостей соответствующих элементов матрицы технического мозга и к увеличению сигнала управления до требуемого значения, после чего процесс дообучения заканчивается. Таким образом реализуется самообучение технической нервной системы.
Структура технической нервной системы определяет ее свойства. Часть столбцов матрицы технического мозга обучена регулировать мощность источника питания рецепторов, их выходы соединены с управляющими входами регулятора мощности питания рецепторов, изменяющего мощность питания в зависимости от сигналов управления, поступающих от выходов технического мозга и от внешних систем. Повышение питающего напряжения групп рецепторов приводит к ускорению движений робота, что следует из формулы (1). Его поведение становится возбужденным. Если напряжение питания рецепторов снижается, движения робота становятся замедленными, поведение - подавленным, угнетенным, хотя он продолжает выполнять поставленные задачи. Повышение напряжения питания групп рецепторов имеет смысл использовать при обучении в ситуациях, которые надо особо выделить, например целевые или опасные ситуации, т.к. при этом изменение проводимостей резисторных элементов мозга будет более значительным, что следует из формулы (2). Изменение уровня питания рецепторов может происходить во время работы объекта управления, что определяет наличие эмоций у объекта управления, которые проявляются в изменении его поведения. Повышение питания рецепторов в сочетании с приятными ощущениями можно назвать положительными эмоциями объекта с технической нервной системой, а в сочетании с неприятными ощущениями - отрицательными эмоциями.
Приятные ощущения отдельного исполнительного органа возникают тогда, когда внешнее воздействие на него совпадает с тем движением, которое определяется его сигналом управления, при этом значение сигнала управления стремится к нулю, и наоборот, неприятными ощущениями являются такие, когда внешнее воздействие противоположно тому, которое определяется сигналом управления исполнительного органа, и переходит в боль, когда движение его в результате внешнего воздействия противоположно сигналу управления, т.к. при этом сигнал управления резко возрастает до максимального значения, что приводит к падению мощности питания рецепторов.
Выходы технического мозга через рецепторы выходных сигналов технического мозга соединены со строчными шинами матрицы мозга, и их сигналы влияют на формирование выходных сигналов управления, реализуя таким образом процесс мышления, а та часть технического мозга, строчные шины которой соединены с выходами мозга - мыслительная его часть [5]. Интеллект технической нервной системы с определенным техническим мозгом характеризуется долей ее мыслительной части. Действия объекта управления, продиктованные воздействием только на рецепторы очувствления, без включения в работу мыслительной части мозга, когда, например, отключено питание рецепторов мозга, являются интуитивными, а действия при участии в формировании сигналов управления мыслительной части мозга - логические или разумные. Соединение выходов мозга через рецепторы выходных сигналов технического мозга со строчными шинами реализует самосознание объекта, поскольку выходные сигналы этих рецепторов являются информацией, характеризующей состояние объекта управления: покоя или движения, что позволяет мозгу контролировать поведение объекта управления и проявлять волю, т. е. переключаться с интуитивного поведения на логическое, переключением питания рецепторов очувствления и рецепторов мозга. При этом важно соотношение участия в формировании поведения объекта мыслительной и остальной части мозга, т.к. недостаточное участие мыслительной части приводит к формированию "животного" поведения, определяемого внешней ситуацией, а слишком большое - приводит к формированию "шизофренического" поведения, основанного на собственных фантазия технической нервной системы, без учета реальной обстановки.
Объекты с техническими нервными системами способны понимать речь и воспроизводить свои мыслительные процессы с помощью речи. Эти возможности достигаются обучением при наличии слуховых рецепторов и исполнительных органов типа "голосовых связок". Понимание речи, точнее смысла услышанного набора звуков, достигается переводом ее на свой внутренний язык, т.е. воспринимаемый рецептором звук преобразуется в сигналы, которые, проходя через матрицу технического мозга, формируют выходной сигнал усилителя, связанного с тем исполнительным органом объекта, который наиболее близко воспроизводит услышанный звук. При этом сам исполнительный орган отключен от усилителя распределителем выходных сигналов технического мозга, а управляющий сигнал усилителя подается через рецепторы мозга на матрицу. Таким образом, восприятие речи объектом аналогично его собственному мыслительному процессу, в результате которого принимается определенное решение, т.е. включаются в работу некоторые исполнительные органы или инициируется дальнейший мыслительный процесс в соответствии с обучением объекта, что и является восприятием смысла услышанной речи. Воспроизведение мыслительного процесса при помощи речи - процесс обратный. Мысль - это цепочка условных рефлексов, вызываемая внешней и внутренней ситуациями при отключенных исполнительных органах объекта, т. е. это в основном не воспроизводимая вслух речь, хотя в мыслительном процессе участвуют все исполнительные органы, не только воспроизводящие звуки, а речь - это мысль при включенных в работу исполнительных органах объекта, воспроизводящих звуки, если не учитывать жестикуляцию.
Объект с технической нервной системой способен к творчеству. Под творчеством понимается задача, обратная процессу обычного интуитивного управления, когда действия объекта определяются внешней ситуацией. В процессе творчества действия объекта направлены на формирование внешней ситуации, соответствующей внутренним ощущениям, определяемым мыслительным процессом. Допустим, в результате мыслительного процесса возникает определенный набор сигналов управления на выходах технического мозга, повышающий мощность питания технической нервной системы, т.е. возникают определенные эмоции. Управление объектом в процессе творчества направлено на создание такого образа, например зрительного, который формировал бы сигналы на выходах технического мозга, аналогичные полученным в результате мыслительного процесса. Такие образы уже могут быть восприняты другими объектами с техническими нервными системами, однотипно обученными, что является способом передачи информации и эмоций, который важен для группы объектов с техническими нервными системами, взаимосвязанных между собой, скажем для роботов, совместно выполняющих одну задачу. Способность к творчеству формируется обучением и самообучением объекта с технической нервной системой.
Если после окончания обучения и самообучения сформированные проводимости элементов мозга пронумеровать и измерить, то полученные числа в строгом порядке, соответствующем номерам элементов мозга, будут являться "вечной душой" данного объекта управления с технической нервной системой, которая позволит воссоздать двойник этого объекта без обучения, а простой настройкой элементов матрицы технического мозга, строчные шины которой подсоединены к соответствующим рецепторам, а столбцовые - к соответствующим исполнительным органам. Техническая нервная система этого двойника может иметь другую физическую основу (гидравлическую, пневматическую, механическую, оптическую [3] и т. д.) или даже не иметь физического воплощения (выполненная в виде, например, компьютерного виртуального объекта), а также может иметь смешанную природу.
Связи, указанные в предлагаемом устройстве, присутствуют в той или иной степени в любой системе материальной или нематериальной: электрической, механической, физической, химической, социальной. В каждой системе есть входы, есть преобразователь входных сигналов в выходные, есть обратные связи и т.д. В то же время любую из этих систем можно рассматривать как результат, выход преобразовательской деятельности другой системы более высокого уровня, которая в свою очередь - результат деятельности системы еще более высокой и т. д. , и все вместе - результат творческой деятельности некоей глобальной системы.
Положительный эффект от использования изобретения достигается повышением функциональных возможностей объекта с технический нервной системой благодаря увеличению числа решаемых им задач и их усложнению, сокращению продолжительности обучения объекта с технической нервной системой решению поставленных задач и повышению точности обучения за счет разделения технического мозга на участки, соответствующие различным задачам и за счет самообучения объекта. Расширение функциональных возможностей достигается также за счет реализации самосознания, воли и эмоций объекта с технической нервной системой, появления у него способности к мышлению и творчеству. Наличие возможности прямого подключения внешних систем к управляющим входам распределителя питания рецепторов, регулятора мощности питания рецепторов, распределителя выходных сигналов технического мозга, распределителя сигналов обучения, регуляторов мощности сигналов обучения и управляющим входам рецепторов внешних систем позволяет техническим нервным системам объединяться между собой и с другими системами, например компьютерными, в единую электронную систему.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБУЧАЕМОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1990 |
|
RU2030780C1 |
| Обучаемая система управления | 1990 |
|
SU1824625A1 |
| ОБУЧАЕМАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2068575C1 |
| Датчик перемещения для обучаемой системы управления | 1987 |
|
SU1788469A1 |
| ОБУЧАЕМАЯ СИСТЕМА УПРАВЛЕНИЯ | 1994 |
|
RU2069053C1 |
| Рецепторный датчик положения обучаемой системы управления | 1985 |
|
SU1352456A1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2001 |
|
RU2213409C2 |
| УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ КОММУТАЦИИ КОЛЛЕКТОРНЫХ МАШИН ПОСТОЯННОГО ТОКА | 1999 |
|
RU2172547C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1996 |
|
RU2099850C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ПОСТОЯННОГО ТОКА С УСТРОЙСТВОМ ФОРМИРОВАНИЯ КОММУТИРУЮЩЕГО ПОЛЯ | 1996 |
|
RU2123753C1 |






Изобретение относится к области автоматики и может быть использовано для управления роботами, станками и др. для регулирования технологических процессов. Техническим результатом является расширение функциональных возможностей за счет увеличения числа решаемых задач и сокращения продолжительности обучения объекта с технической нервной системой. Устройство содержит технический мозг, распределитель выходных сигналов технического мозга, регулятор мощности питания рецепторов, активное устройство обучения, рецепторы выходных сигналов технического мозга, внешних систем, обучения и распределения питания. 1 з.п. ф-лы, 10 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ОБУЧАЕМОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1990 |
|
RU2030780C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рецепторный датчик положения обучаемой системы управления | 1985 |
|
SU1352456A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Обучаемое оптическое устройство управления элементом перемещения | 1988 |
|
SU1647604A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Датчик перемещения для обучаемой системы управления | 1987 |
|
SU1788469A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Обучаемая система управления | 1990 |
|
SU1824625A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| ОБУЧАЕМАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2068575C1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| ОБУЧАЕМАЯ СИСТЕМА УПРАВЛЕНИЯ | 1994 |
|
RU2069053C1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Антонов В.М., Буков А.А | |||
| Обучение поиску одного предмета среди нескольких | |||
| Тезисы докладов областной научно-практической конференции "Опыт и проблемы внедрения робототехники и ГАП на промышленных предприятиях области" | |||
| - Липецк: ЛипПИ, 1987, с.66 - 70 | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Петров И.М | |||
| и др | |||
| Физические основы записи и хранения информации в аналоговых запоминающих элементах (АЗЭ) из ХСП | |||
| Тезисы докладов к региональной научно-технической конференции "Автоматизированное проектирование и автоматизация производственных процессов" | |||
| - Липецк: ЛипПИ, 1989, с.75 - 76 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Петров И.М | |||
| и др | |||
| Аналоговые элементы памяти на основе ХСП | |||
| Там же, с.77 - 78 | |||
| Антонов В.М., Петров И.М | |||
| Корректировка проводимостей элементов памяти обучаемой системы управления | |||
| Там же, с.79 - 80. | |||
