Изобретения относятся к области вычислительной техники, в частности к способам и устройствам контроля, и могут найти применение в практике эксплуатации для определения оптимального времени очередного проведения профилактического обслуживания изделия по состоянию, и могут быть использованы в различных областях техники, в частности в системе железнодорожного транспорта для принятия решения о профилактическом обслуживании элемента технических устройств железнодорожного транспорта.
Известен способ определения оптимального периода технического обслуживания изделия, реализованный при использовании известного устройства определения оптимального периода технического обслуживания изделия (RU 2347272 C1, G07C 3/08, 20.02.2009).
В известном способе оптимальный период обслуживания объекта определяют с учетом фактора его старения и времени, отведенного на техническое обслуживание. Критерием оптимизации периодов обслуживания является минимум коэффициента простоя при заданном допустимом значении времени технического обслуживания изделия. При реализации известного способа решается задача повышения точности определения оптимального периода обслуживания объекта. Эта задача решается за счет введения второго блока перемножения, второго блока деления и четвертого элемента задержки, а также за счет изменения ряда межблочных и межэлементных связей.
Недостатком известного способа определения оптимального периода обслуживания объекта является ограниченная сфера использования, а именно, только для объекта с фактором старения, отказы которого распределяются по закону Релея, а также плановое проведение профилактических работ без учета текущего состояния надежности объекта.
Наиболее близким аналогом в части способа является способ определения оптимального периода технического обслуживания объекта, реализованный при использовании известного устройства для определения оптимальной программы технического обслуживания системы (RU 2358320 С1, G07C 3/08, 10.06.2009). Способ заключается в реализации математической модели, позволяющей определять временную программу обслуживания системы, обеспечивающую оптимальную периодичность обслуживания каждой из подсистем и системы в целом.
Устройство, реализующее известный способ, является наиболее близким аналогом в части устройства и содержит блок памяти, два блока умножения, три сумматора, два блока деления, вычитатель, блок нелинейности, датчик времени, блок сравнения, интегратор, три элемента задержки, схему ИЛИ, ждущий мультивибратор, элемент памяти, ключ и сдвиговый регистр.
Однако известные способ и устройство определения оптимального периода технического обслуживания изделия не учитывает характер изменения текущей интенсивности отказов относительно условий эксплуатации и типов эксплуатируемых устройств.
Задача, решаемая предлагаемыми изобретениями, заключается в создании способа и системы определения оптимального времени очередного проведения профилактического обслуживания объекта по состоянию его надежности, при котором временные и стоимостные затраты на проведение профилактических и ремонтно-восстановительных работ будут не выше затрат на проведение ремонтно-восстановительных работ без профилактических работ (ПФР).
Техническим результатом изобретения является определение оптимального интервала времени между соседними профилактическими работами (ПФР) технического обслуживания объекта по текущему состоянию его надежности за счет учета временных и стоимостных затрат на проведение профилактических и ремонтно-восстановительных работ.
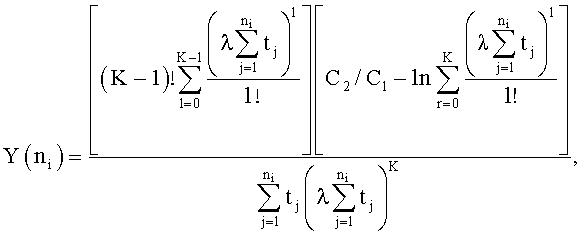
Это достигается тем, что в способе определения времени начала проведения очередного профилактического обслуживания объекта подсчитывают количество ni отказов на интервале времени от 0 до i-го управления профилактическим обслуживанием изделия и измеряют время tj между соседними отказами, осуществляют статистическую обработку отказов объекта, на основании которых строят гистограмму отказов объекта и подбирают значение целочисленного параметра K, по которому с помощью формулы распределения Эрланга устанавливают соответствующий закон распределения времени между отказами объекта, а также оценивают интенсивность отказов объекта λi в каждый i-й момент времени при заданной доверительной вероятности β и вычисляют коэффициенты rH, rB, определяющие соответственно нижнюю и верхнюю границы доверительного интервала интенсивности отказов, для определения времени между соседними профилактическими работами объекта используют решающую функцию в виде: 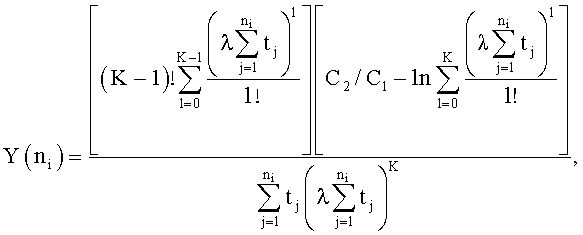
где C1 - штраф за отказ объекта;
C2 - штраф за проведение профилактического обслуживания (ПФР) объекта,
вычисляют значение решающей функции для текущего значения отказов и для отказов, соответствующих нижней и верхней границам доверительного интервала интенсивности отказов на заданном интервале времени Y1=Y(rнni,), Y2=Y{ni) и Y3=Y(rв,n,), решение на проведение очередного профилактического ремонта принимают в том случае, если Y1>Y2>Y3 и Y3<1, причем, если количество отказов n<100, значение целочисленного параметра K, соответствующего закону распределения времени между отказами объекта, подбирают по форме гистограммы, если n≥100 - по критерию согласия А.Н.Колмогорова или χ2.
Система определения времени проведения профилактического обслуживания содержит датчик отказов объекта, выход которого подключен к входу счетчика числа отказов, выходом подключенный к первому входу центрального процессора автоматизированного рабочего места оператора службы контроля, блок измерения времени между отказами, включенный между выходом датчика и вторым входом центрального процессора, третий вход которого подключен к выходу блока ввода информации, а первый выход - к входу блока отображения, блок выбора закона распределения случайного времени между отказами, первым входом соединенный со вторым выходом центрального процессора, а вторым входом - с выходом блока измерения времени между отказами, последовательно соединенные блок выбора доверительной вероятности, блок определения доверительного интервала отказов, блок вычисления решающей функции и блок принятия решения, а также задатчик стоимости штрафов, выходом подключенный к четвертому входу центрального процессора, пятый вход которого соединен с выходом блока выбора закона распределения случайного времени между отказами, третий выход - с входом блока выбора доверительной вероятности, а четвертый выход центрального процессора соединен со вторым входом блока определения доверительного интервала отказов и соответствующим входом блока вычисления решающей функции, другие входы которого подключены соответственно к выходам блока измерения интервала времени между отказами, счетчика количества отказов, ко второму и пятому выходам центрального процессора, шестым выходом соединенного с аппаратно-программным устройством оператора службы оперативно-профилактического обслуживания, а шестым входом - к выходу блока принятия решения.
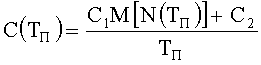
Суммарную функцию штрафов можно представить:

где C1 - штраф за отказ объекта;
M[N1(t)] - математическое ожидание количества отказов изделия на интервале [0;t];
С2 - штраф за проведение профилактического обслуживания (ПФР) объекта;
M[N2(t)] - математическое ожидание количества профилактических работ (ПФР) на интервале [0;t].
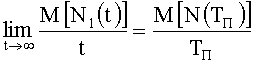
Известно (см. Кокс Д., Смит В., Теория восстановления, под редакцией Ю.К.Беляева, М.: Сов. Радио, 1967, 299 с.), что при условии неизменности функции интенсивности отказов после проведения аварийно-восстановительных работ справедливы следующие соотношения:
 и
и 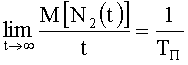
где M[N(TП)] - функция восстановлений устройства в интервале времени [0,ТП] между двумя соседними ПФР. Отсюда следует, что
 ,
,
а функция восстановлений  , где λ(x) - интенсивность отказов объекта.
, где λ(x) - интенсивность отказов объекта.
Путем минимизации функции С(TП) по параметру TП можно найти оптимальное выражение для интервала времени между ПФР:
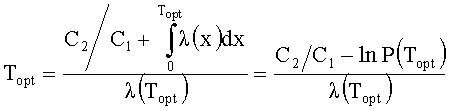
где P(Topt) - вероятность безотказной работы объекта в интервале времени Topt.
Формула получена с учетом того, что
Тогда
Разделив левую и правую части выражения:
 ,
,
на Topt, и, учитывая, что Topt=nT Т, где nT - математическое ожидание количества отказов объекта в интервале времени [0,Topt], получим

Смысл данного выражения заключается в следующем. Если интервал времени между соседними ПФР выбран оптимально, то затраты (временные и стоимостные) на проведение профилактических и ремонтно-восстановительных работ между ними будут в среднем равны затратам на проведение ремонтно-восстановительных работ без ПФР. Во втором случае количество отказов и восстановлений естественно будет больше. Если же время до очередных ПФР будет существенно больше установленного оптимального, то это приведет к росту интенсивности отказов объекта, росту затрат на ремонтно-восстановительные работы по сравнению с оптимальным уровнем. Левая часть выражения (1) будет меньше 1. В случае существенного уменьшения интервала времени до очередных ПФР появятся дополнительные затраты на профилактические работы, которые не скомпенсируют выигрыш в стоимости от уменьшения количества отказов и восстановлений в результате дополнительных ТО. В этом случае левая часть выражения (1) будет больше 1.
Таким образом, формула (1) является базовой для разработки правила принятия решения по выводу объекта на очередные ПФР на основе статистики отказов объекта, стоимости ремонтно-восстановительных и профилактических работ.
С этой целью введем функцию
Если ni=nT, то Y(ni)=1.
Так как  , где tj - случайное время между двумя соседними отказами, то
, где tj - случайное время между двумя соседними отказами, то
Оценка интенсивности отказов объекта в i-й момент управления системой технического обслуживания (ТО) при заданной доверительной вероятности β производится с помощью справочных таблиц распределения χ2 или распределения Пуассона:
 ;
;  ;
;  .
.
Коэффициенты rH, rB определяют нижнюю и верхнюю границы доверительного интервала параметра  .
.
Из этих выражений следует, что
 .
.
Если интенсивность отказов объекта есть количество его отказов в единицу времени, то ni, - количество отказов на интервале времени от 0 до i-го управления техническим объектом. Следовательно, существуют строгие верхняя и нижняя оценки количества отказов на указанном интервале времени ni min=rHni; ni max=rBni.
Это обстоятельство означает, что значения решающей функции Y(ni) должны находиться за пределами интервала значений Y(rвni) и Y(rнni).
Для описания случайного времени между отказами объекта в условиях поставленной задачи применяют целесообразно применение такого универсального распределения, чтобы путем изменения его параметра можно было бы трансформировать его в одно из известных, которое наиболее приемлемо для описания имеющихся статистических данных времени между отказами рассматриваемого устройства. Таким универсальным распределением случайного времени между отказами может быть распределением Эрланга K-го порядка:
 и
и 
Путем изменения целочисленного параметра K трансформируют данное распределение случайного времени между отказами в одно из известных. Например, при K=1 это распределение трансформируется в экспоненциальное, при K=2 - в распределение Релея, при K>10 трансформируется в нормальное распределение. Выбор того или иного распределения, а следовательно, задание параметра K, определяется результатами обработки статистических данных, а также инженерными соображениями о характере износа объекта.
Если время между отказами объекта распределено по закону Эрланга K-го порядка и по статистическим данным об отказах на интервале времени от 0 до текущего момента управления ТО установлено, что rBni>nT, то решающая функция определяется неравенством Y(rBni)<1.
Если же установлено, что rBni≤nT, то решающая функция равна или превышает значение Y(rBni)≥1.
Действительно, поскольку функции λ{t) и P(t) монотонные и λ{t) - возрастающая функция, скорость увеличения функции tλ{t) больше скорости увеличения функции lnP(t). Поэтому с увеличением интервала времени t уменьшается значение выражения (3). Следовательно, если rBni>ni, то Y(rBni)<Y(ni). В соответствии с формулой (2), Y(nT)=1. Поэтому, если rBni>nT, то решающая функция Y(rBni)<1. При rBni≤nT справедливо условие Y(rBnt)≥1.
Таким образом, решающее правило, определяющее необходимость проведения очередных ПФР по состоянию частоты отказов объекта, устанавливается неравенством:
Y(rBni)<1
В этом случае, при выполнении данного неравенства количество зафиксированных отказов объекта превышает их математическое ожидание сверх ожидаемого, возрастает интенсивность отказов объекта, что требует оперативного проведения очередных профилактических работ.
Возможность реализации способа подтверждается конкретным примером, описывающим работу системы определения времени проведения профилактического обслуживания по состоянию элемента путевого хозяйства железной дороги.
На фиг.1. представлена структурная схема системы определения времени очередного проведения профилактического обслуживания элемента путевого хозяйства.
Система включает датчик 1 отказов объекта, выход которого подключен к входу счетчика 2 числа отказов, выходом подключенного к первому входу центрального процессора 3 автоматизированного рабочего места 13 оператора службы контроля, блок 4 измерения времени между отказами, включенный между выходом датчика 1 и вторым входом центрального процессора 3, третий вход которого подключен к выходу блока 5 ввода информации, а первый выход - к входу блока 6 отображения, блок 7 выбора закона распределения случайного времени между отказами, первым входом соединенный со вторым выходом центрального процессора 3, а вторым входом - с выходом блока 4 измерения времени между отказами, последовательно соединенные блок 8 выбора доверительной вероятности, блок 9 определения доверительного интервала отказов, блок 10 вычисления решающей функции и блок 11 принятия решения, а также задатчик 12 стоимости штрафов, выходом подключенный к четвертому входу центрального процессора 3, пятый вход которого соединен с выходом блока 7 выбора закона распределения случайного времени между отказами, третий выход - с входом блока 8 выбора доверительной вероятности, а четвертый выход центрального процессора 3 соединен со вторым входом блока 9 определения доверительного интервала отказов и соответствующим входом блока 10 вычисления решающей функции, другие входы которого подключены соответственно к выходам блока 4 измерения интервала времени между отказами, счетчика 2 количества отказов, ко второму и пятому выходам центрального процессора, шестым выходом соединенного с аппаратно-программным устройством оператора службы автоматизированной системы управления путевого хозяйства железных дорог (АСУ-П), а шестым входом - к выходу блока 11 принятия решения.
Система работает следующим образом.
Датчик 1 отказов по сигналам от автоматизированной системы АСУ-П фиксирует отказы элемента путевого хозяйства в течение заданного промежутка времени, счетчик 2 осуществляет подсчет количества ni отказов, и направляет полученные данные на первый вход центрального процессор 3 автоматизированного рабочего места 13 оператора службы контроля. Одновременно блок 4 измерения времени между отказами измеряет время tj между отказами и направляет измеренные данные на второй вход центрального процессора 3.
Центральный процессор 3 на основании полученных данных осуществляет первичную статистическую обработку данных, по результатам которой вычисляет интенсивность отказов в каждый i-й момент времени управления элемента путевого хозяйства, строит гистограмму отказов элемента в зависимости от времени и направляет ее для визуального отображения в блок 6. При этом интервалы дискретизации выбирает оператор службы контроля и вводит их в процессор 3 с помощью блока 5 ввода информации. Для построения гистограммы используют стандартные программные средства, например, программы MATLAB.
Оператор анализирует представленную на экране блока 6 гистограмму, и по ее форме предварительно подбирает вид закона распределения случайного времени между отказами, который не противоречил бы инженерным соображениям о характере износа элемента исследования, и вводит в центральный процессор 3 с помощью блока 5 значение целочисленного параметра K, соответствующего подобранному закону распределения.
Кроме того, центральный процессор 3 вычисляет интенсивность отказа элемента  в i-й момент времени, оценивает количество ni отказов на интервале времени от 0 до i-го управления профилактическим обслуживанием объекта. Если ni>100, то выбор закона распределения случайного времени между отказами элемента осуществляют по критерию согласия А.Н.Колмогорова либо χ2. Эту операцию осуществляют в блоке 7 выбора закона распределения. При этом центральный процессор 3 формирует соответствующий сигнал и отображает информацию о превышении допустимого значения количества отказов на экране блока 6 отображения. Оператор с помощью блока 6 выбирает критерий согласия и через центральный процессор 3 передает его значение на вход блока 7, на другие входы которого поступает информация, характеризующая интенсивность отказов
в i-й момент времени, оценивает количество ni отказов на интервале времени от 0 до i-го управления профилактическим обслуживанием объекта. Если ni>100, то выбор закона распределения случайного времени между отказами элемента осуществляют по критерию согласия А.Н.Колмогорова либо χ2. Эту операцию осуществляют в блоке 7 выбора закона распределения. При этом центральный процессор 3 формирует соответствующий сигнал и отображает информацию о превышении допустимого значения количества отказов на экране блока 6 отображения. Оператор с помощью блока 6 выбирает критерий согласия и через центральный процессор 3 передает его значение на вход блока 7, на другие входы которого поступает информация, характеризующая интенсивность отказов  в i-й момент времени и значения времени tj между отказами.
в i-й момент времени и значения времени tj между отказами.
В блоке 7 подбирают значение целочисленного параметра K, соответствующее известному закону распределения, наиболее близкого к закону распределения случайного времени между отказами элемента по результатам статистической обработки данных.
При этом в качестве универсального распределения времени между отказами используют распределение Эрланга K-го порядка:
Где l - индекс суммирования;
K - параметр, соответствующий закону распределения отказов объекта, представленный формулой Эрланга.
Как известно, путем изменения значения целочисленного параметра K можно трансформировать данное распределение случайного времени между отказами в одно из известных. Например, при K=1 это распределение трансформируется в экспоненциальное, при K=2 - в распределение Релея, при K>10 трансформируется в нормальное распределение.
Таким образом, в блоке 7 выбирают значение параметра K, при котором расчетное распределение Эрланга K-го порядка наиболее близко соответствовало подобранному путем статистической обработки значению функции распределения случайного времени между отказами элемента, а также инженерными соображениями о характере износа элемента.
С выхода блока 7 информация, характеризующая подобранное значение параметра К, передается на соответствующий вход центрального процессора 3.
Центральный процессор 3 в зависимости от числа ni отказов передает на вход блока 8 определения доверительных интервалов отказов элемента значение параметра К с выхода блока 5 либо блока 7. На входы блока 9 поступает также информация о доверительной вероятности β и количестве отказов ni соответственно с выходов блока 9 и счетчика 2.
Блок 8 выбора доверительной информации задает следующие значения β: 0,85; 0,9; 0,95. Выбор соответствующего значения доверительной вероятности β осуществляет оператор через центральный процессор 3 с помощью блока 5.
В блоке 9 по известным таблицам (см. П.Мюллер, П.Нойман, Р.Шторм, таблицы по математической статистике, М.: Финансы и статистика, 1982 г.) с учетом заданной доверительной вероятности β и закона распределения случайного времени между отказами (параметр K) определяют граничные значения доверительного интервала отказов rH, rB, которые направляют на соответствующие входы блока 11 вычисления решающей функции.
Кроме того, на вход центрального процессора 3 подается также информация с выходов задатчика 12 стоимости штрафов - информация о величине C1 штрафа за отказ элемента путевого хозяйства и С2 штрафа за проведение профилактического обслуживания элемента путевого хозяйства. Причем величины штрафов C1 и C2 величины нормированные. Если величина C1 постоянна, то C2 зависит от объекта вида профилактического обслуживания.
Процессор 3 вычисляет отношение C1 к C2 и направляет значение C1/C2 на один из входов блока 10 вычисления решающей функции, на другие входы которого поступает информация об интенсивности отказов  и законе распределения случайного времени между отказами K с соответствующих выходов центрального процессора 3, информация о количестве отказов ni - с выхода счетчика 2 числа отказов, а также информация tj - с выхода блока 4.
и законе распределения случайного времени между отказами K с соответствующих выходов центрального процессора 3, информация о количестве отказов ni - с выхода счетчика 2 числа отказов, а также информация tj - с выхода блока 4.
По формуле решающей функции рассчитывают функции Y(rH ni,)=Y1, Y(ni)=Y2 и Y(rв,ni,)=Y3.
В блоке 11 принятия решения проверяют выполнение условия Y1>Y2>Y3. Если условие выполняется и при этом Y3<1, то принимают решение на проведение очередных профилактических работ (ПФР). В этом случае соответствующая информация с выхода блока 11 направляется на соответствующий вход центрального процессора 3, который формирует команду на проведение ремонтно-профилактических работ исследуемого элемента путевого хозяйства и направляет ее в аппаратно-программное устройство оператора службы пути и путевого хозяйства. В противном случае информация команды на проведение ремонтно-профилактических работ не поступает и работа исследуемого элемента продолжается.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ КОМПЛЕКСНОГО УПРАВЛЕНИЯ РЕСУРСАМИ, РИСКАМИ, НАДЕЖНОСТЬЮ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2015 |
|
RU2579981C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ЭКСПЛУАТАЦИОННОЙ ГОТОВНОСТИ ОБЪЕКТА ТЕХНИКИ | 2024 |
|
RU2820568C1 |
| Двухканальная система для регулирования движения железнодорожных транспортных средств | 2020 |
|
RU2726243C1 |
| СИСТЕМА ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2012 |
|
RU2519322C1 |
| Способ определения пожарной опасности технических объектов железнодорожного транспорта и система для его реализации | 2017 |
|
RU2674216C1 |
| Устройство для испытаний на случайные вибрации | 1989 |
|
SU1704005A1 |
| Гибридное устройство маршрутизации | 2019 |
|
RU2710503C1 |
| СИСТЕМА ДЛЯ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2008 |
|
RU2390456C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОКАЗАТЕЛЕЙ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ СЕТИ СВЯЗИ С КОММУТАЦИЕЙ ПАКЕТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2663704C1 |
| СПОСОБ УПРАВЛЕНИЯ СЛОЖНОЙ ЖЕЛЕЗНОДОРОЖНОЙ СИСТЕМОЙ | 2008 |
|
RU2414371C2 |
Группа изобретений относится к области вычислительной техники, в частности к способам и устройствам контроля, и может найти применение в практике эксплуатации для оптимального управления профилактическим обслуживанием объекта по текущему состоянию его надежности, и может быть использована в различных областях техники, в частности в системе железнодорожного транспорта для принятия решения о профилактическом обслуживании объекта железнодорожного транспорта. Техническим результатом является определение оптимального интервала времени между соседними профилактическими работами технического обслуживания объекта по текущему состоянию его надежности с учетом временных и стоимостных затрат. Устройство содержит датчик отказов объекта, счетчик числа отказов, блок измерения времени между отказами, центральный процессор АРМ оператора, блок ввода информации, блок отображения, блок выбора закона распределения случайного времени между отказами, блок выбора доверительной вероятности, блок определения доверительного интервала отказов, блок вычисления решающей функции, блок принятия решения, задатчик стоимости штрафов. 2 н.п. ф-лы, 1 ил.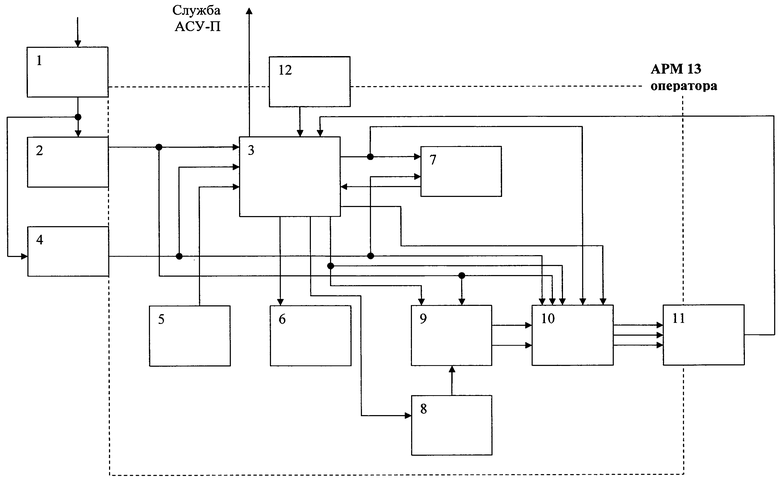
1. Способ определения времени проведения очередного профилактического обслуживания объекта, заключающийся в том, что на интервале времени от 0 до i-го управления профилактическим обслуживанием объекта подсчитывают количество ni отказов и измеряют время tj между соседними отказами, осуществляют статистическую обработку отказов объекта, на основании которой строят гистограмму отказов объекта и с помощью формулы распределения Эрланга K-го порядка подбирают значение целочисленного параметра K, соответствующее закону распределения времени между отказами объекта, а также оценивают интенсивность отказов объекта λi в каждый i-й момент времени при заданной доверительной вероятности β и вычисляют коэффициенты rН, rВ, определяющие соответственно нижнюю и верхнюю границы доверительного интервала интенсивности отказов, для определения времени между соседними профилактическими работами объекта используют решающую функцию в виде:
где С1 - штраф за отказ объекта;
С2 - штраф за проведение профилактических работ объекта;
вычисляют значение решающей функции для текущего значения отказов и для значения отказов, соответствующих нижней и верхней границам доверительного интервала интенсивности количества отказов на заданном интервале времени Y1=Y(rн ni,), Y2=Y(ni) и Y3=Y(rв, ni), решение на проведение очередного профилактического обслуживания объекта принимают в том случае, если Y1>Y2>Y3 и Y3<1, причем, если количество отказов n<100, значение целочисленного параметра K, соответствующего закону распределения времени между отказами объекта, подбирают по форме гистограммы, если n>100 - по критерию согласия А.Н.Колмогорова или χ2.
2. Система определения времени проведения очередного профилактического обслуживания объекта, содержащая датчик отказов объекта, выход которого подключен к входу счетчика числа отказов, выходом подключенного к первому входу центрального процессора автоматизированного рабочего места оператора службы контроля, блок измерения времени между отказами, включенный между выходом датчика и вторым входом центрального процессора, третий вход которого подключен к выходу блока ввода информации, а первый выход - к входу блока отображения, блок выбора закона распределения случайного времени между отказами, первым входом соединенный со вторым выходом центрального процессора, а вторым входом - с выходом блока измерения времени между отказами, последовательно соединенные блок выбора доверительной вероятности, блок определения доверительного интервала отказов, блок вычисления решающей функции и блок принятия решения, а также задатчик стоимости штрафов, выходом подключенный к четвертому входу центрального процессора, пятый вход которого соединен с выходом блока выбора закона распределения случайного времени между отказами, третий выход - с входом блока выбора доверительной вероятности, а четвертый выход центрального процессора соединен со вторым входом блока определения доверительного интервала отказов и соответствующим входом блока вычисления решающей функции, другие входы которого подключены соответственно к выходу блока измерения интервала времени между отказами, счетчика количества отказов, ко второму и пятому выходам центрального процессора, шестым выходом соединенного с аппаратно-программным устройством оператора профилактического обслуживания, а шестым входом - к выходу блока принятия решения.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОЙ ПРОГРАММЫ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ СИСТЕМЫ | 2007 |
|
RU2358320C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 2007 |
|
RU2347272C1 |
| Устройство для определения оптимального периода технического обслуживания изделия | 1990 |
|
SU1737466A1 |
| DE 102008043100 A1, 29.04.2010 | |||
| СПОСОБ ПОЛУЧЕНИЯ α,β -НЕНАСЫЩЕННЫХ КЕТОНОВ АРОМАТИЧЕСКОГО ИЛИ ГЕТЕРОАРОМАТИЧЕСКОГО РЯДА | 1994 |
|
RU2082710C1 |
| US 2003191605 A1, 09.10.2003. | |||

