Изобретение относится к устройствам управления движением на железных дорогах и может быть использовано в системах управления и регулирования движения поездов на станциях, перегонах и на промышленных предприятиях.
Известны системы централизации стрелок и сигналов [А.А. Казаков, В.Д. Бубнов Е.А. Казаков. Станционные устройства автоматики и телемеханики. - М.: Транспорт, 1990. 431 c.]. Данные системы используют в качестве основной элементной базы электромагнитные реле. Недостатком этих устройств являются высокая стоимость, высокое электропотребление, высокая стоимость технического обслуживания.
Известны системы централизации стрелок и сигналов [Сапожников Вл.В. и др. Микропроцессорные системы централизации. - Москва: ГОУ Учебный центр по образованию на железнодорожном транспорте, 2006. – 398 с.]. Данные системы используют в качестве основной элементной базы микропроцессорные устройства. Системы состоят из главного вычислительного устройства и устройств сопряжения с объектами контроля и управления.
Известна централизованная диспетчерская система с распределенными контролируемыми пунктами (RU2240245 С1, B61L 27/04, опубл. 20.11.2003). Известная система содержит распределенные контролируемые пункты и центральный пункт управления с рабочим местом поездного диспетчера, объединенные внешней локальной сетью. Каждый распределенный контролируемый пункт содержит блоки вывода сигналов телеуправления, блоки ввода сигналов телесигнализации, блоки ввода сигналов телеизмерения и резервированный центральный блок управления, предназначенный для связи по внешней локальной сети этого распределенного контролируемого пункта с другими контролируемыми распределенными пунктами и с упомянутым центральным пунктом управления, а также для связи по внутренней локальной сети с блоками вывода сигналов телеуправления, блоками ввода сигналов телесигнализации, блоками ввода сигналов телеизмерения.
Централизованная диспетчерская система с распределенными контролируемыми пунктами имеет следующие недостатки:
- алгоритмы работы системы определяются программным обеспечением резервированного центрального блока управления;
- изменение алгоритмов работы системы невозможно без изменения программного обеспечения резервированного центрального блока управления;
- функции централизации стрелок и сигналов не выполняются;
- функциональные зависимости (блокировки) системой не осуществляются.
Наиболее близким по техническому исполнению к предложенному устройству является микропроцессорная система централизации и автоблокировки на железнодорожном транспорте (RU 107753 U1, B61L 27/04, опубл. 27.08.2011). Известная система содержит центральный процессор, включающий микропроцессоры, устройства связи с объектом, включающие интерфейсные модули сбора информации о состоянии объектов контроля железнодорожной станции и прилегающих перегонов, интерфейсные модули передачи ответственных команд, которые подключены к исполнительным устройствам электрической централизации и автоблокировки. Центральный процессор содержит три микропроцессора, которые межканально связаны между собой, и каждый из них связан с двумя соседними микропроцессорами.
Недостатками данной микропроцессорной системы централизации и автоблокировки на железнодорожном транспорте являются:
- алгоритмы работы системы определяются программным обеспечением центрального процессора;
- изменение алгоритмов работы системы невозможно без изменения программного обеспечения центрального процессора;
- наличие предела количества объектов контроля и управления (особенно для крупных станций, при одновременном задании множества команд и большом объеме движения), при котором управление осуществляется в реальном времени (с приемлемой задержкой);
- сложность формирования функциональных зависимостей для всей станции, причем эту операцию следует выполнять для каждой новой станции;
- необходимость повторного формирования функциональных зависимостей для всей станции, даже при незначительном изменении топологии станции;
- необходимость повторной проверки всех функциональных зависимостей на станции, даже при незначительном изменении топологии станции.
В известных системах централизации функциональные зависимости (блокировки) осуществляются в главном вычислительном устройстве, а устройства сопряжения осуществляют только ввод и вывод сигналов.
Предлагаемое устройство характеризуется тем, что функциональные зависимости в нем осуществляются несколькими вычислительными устройствами, каждое из которых осуществляет функциональные зависимости для одного элемента путевого развития. В результате становится возможным построение системы управления для конкретного объекта автоматизации путем выбора необходимых вычислительных устройств, соответствующих элементам путевого развития, и соединения их между собой каналами связи, а отсутствие необходимости разработки сложного программного обеспечения функциональных зависимостей объекта автоматизации приводит к сокращению сроков и стоимости ввода объекта автоматизации в эксплуатацию при пуске или после изменения путевого развития станции.
Элементами путевого развития объекта автоматизации могут быть: входной светофор, выходной светофор, маневровый светофор, участок пути, приемо-отправочный путь, стрелка и другие.
Заявленное изобретение направлено на решение задачи построения гибридной системы централизации, маршрутизации и блокировки на основе типовых вычислительных устройств, с формированием функциональных зависимостей несколькими типовыми вычислительными устройствами, входящими в маршрут, причем типы вычислительных устройств и каналы связи между ними определяются типами элементов путевого развития и связями между ними.
Построение такой гибридной системы централизации, маршрутизации и блокировки необходимо при разработке и создании систем управления движением на железных дорогах (станциях, перегонах, разъездах, блок-постах, сортировочных горках).
Заявленное устройство строится на основе однокристальных микроконтроллеров [10 практических устройств на AVR микроконтроллерах. Книга 1 - М.: Издательский дом «Додэка-XXI», К. «МК-Пресс», 2008. – 224 с.]. Несколько однокристальных микроконтроллеров используются в каждом вычислительном устройстве.
Сущность изобретения состоит в том, что гибридное устройство маршрутизации, содержащее автоматизированное рабочее место дежурного по станции, объекты контроля, объекты управления, дополнительно содержит L локальных вычислительных сетей, N вычислительных устройств M типов, Z каналов связи. Причем каждое автоматизированное рабочее место подключено к каждой локальной сети. Каждая локальная сеть подключена к каждому вычислительному устройству. Каждое вычислительное устройство соответствует одному элементу путевого развития и осуществляет функциональные зависимости для одного элемента путевого развития объекта автоматизации. Вычислительные устройства соединяются между собой каналами связи в соответствии со связями элементов путевого развития объекта автоматизации. Вычислительные устройства содержат первую и вторую пару однокристальных микроконтроллеров, устройство сравнения, приемо-передатчик, устройство ввода сигналов, устройство вывода сигналов. Первая пара однокристальных микроконтроллеров подключена к локальным вычислительным сетям, к каналам связи, к устройству сравнения, к приемо-передатчику. Устройство сравнения подключено к приемо-передатчику. Вторая пара однокристальных микроконтроллеров подключена к приемо-передатчику и к устройству вывода сигналов. Устройство ввода сигналов подключено к второй паре однокристальных микроконтроллеров. Каждое вычислительное устройство соединяется с соответствующими объектами контроля и управления.
За счет использования предлагаемого гибридного устройства маршрутизации сокращаются сроки ввода в эксплуатацию объекта автоматизации при сохранении заданного уровня безопасности, а также упрощается процесс проектирования.
Техническим результатом является расширение реализации технических средств устройства маршрутизации для систем управления движением на железных дорогах.
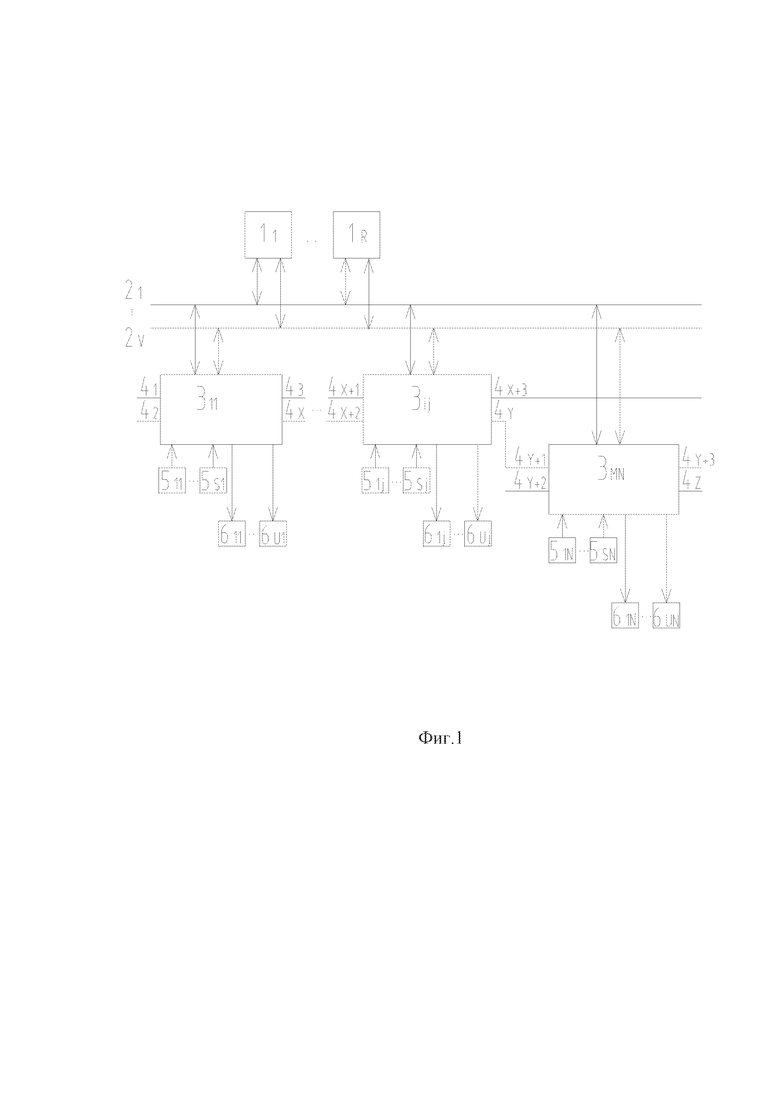
На фиг. 1 представлена функциональная схема гибридного устройства маршрутизации.
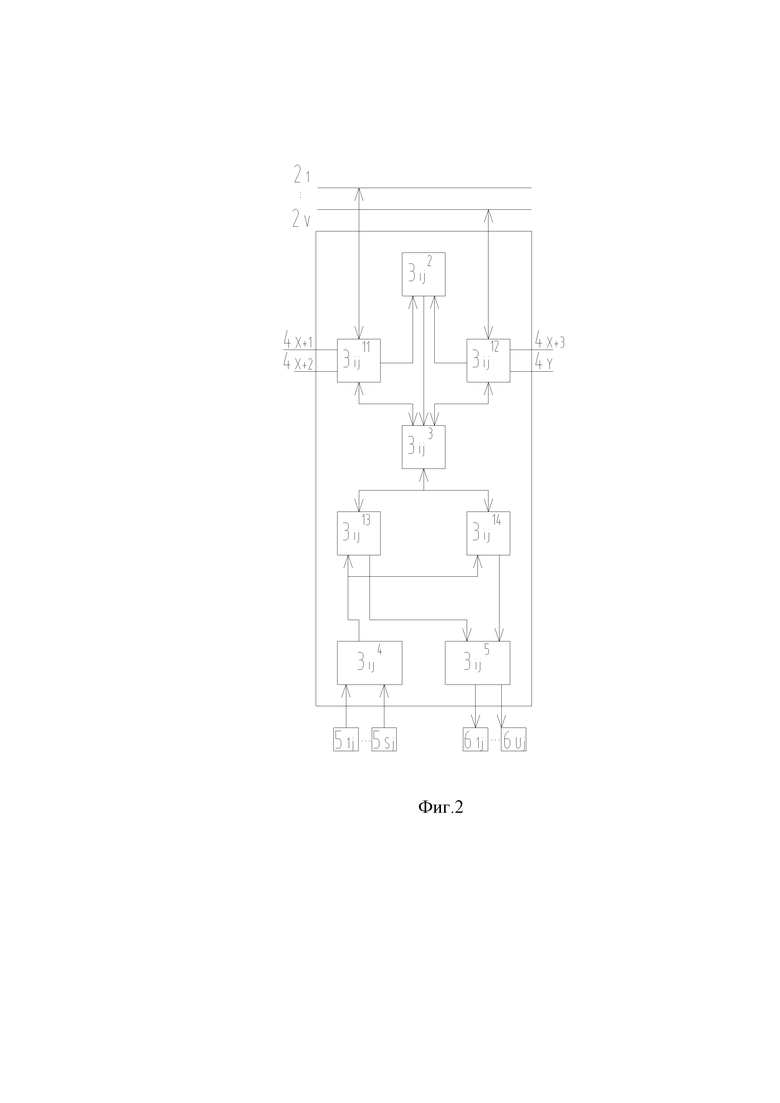
На фиг. 2 представлена функциональная схема вычислительного устройства.
Гибридное устройство маршрутизации (фиг. 1) состоит из автоматизированных рабочих мест 1i, i=1…R, локальных вычислительных сетей 2i, i=1…L, N вычислительных устройств M типов 3ij, i=1…M, j=1…N, Z каналов связи 4i, i=1…Z, объектов контроля 5ij, i=1…S, j=1…N, объектов управления 6ij, i=1…U, j=1…N. N – количество элементов путевого развития, M – количество типов элементов путевого развития объекта автоматизации.
В частности, вычислительные устройства 3ij, i=1…M, j=1…N могут быть следующих типов: 31i – вычислительное устройство входного светофора, 32i – вычислительное устройство выходного светофора, 33i – вычислительное устройство маневрового светофора, 34i – вычислительное устройство участка пути, 35i – вычислительное устройство приемо-отправочного пути, 36i – вычислительное устройство стрелки.
Вычислительное устройство 3ij, i=1…M, j=1…N (фиг. 2) состоит из первой и второй пары однокристальных микроконтроллеров 3ij11… 3ij14 (3ij11, 3ij12 – первая пара, 3ij13, 3ij14 – вторая пара), устройства сравнения 3ij2, приемо-передатчика 3ij3, устройства ввода сигналов 3ij4, устройства вывода сигналов 3ij5.
Первая пара однокристальных микроконтроллеров 3ij11, 3ij12 подключена к локальным вычислительным сетям 2i, i=1…L, к каналам связи 4i, i=1…Z, к устройству сравнения 3ij2, к приемо-передатчику 3ij3. Устройство сравнения 3ij2 подключено к приемо-передатчику 3ij3. Вторая пара однокристальных микроконтроллеров 3ij13, 3ij14 подключена к приемо-передатчику 3ij3 и к устройству вывода сигналов 3ij5. Устройство ввода сигналов 3ij4 подключено ко второй паре однокристальных микроконтроллеров 3ij13, 3ij14.
Первая пара однокристальных микроконтроллеров 3ij11, 3ij12 осуществляет проверку условий возможности выполнения команды в данный момент времени. Устройство сравнения 3ij2 осуществляет сравнение результатов работы двух однокристальных микроконтроллеров 3ij11, 3ij12 и в случае несовпадения блокирует работу приемо-передатчика 3ij3. Устройство ввода сигналов 3ij4 преобразует сигналы телесигнализации к виду второй пары однокристальных микроконтроллеров 3ij13, 3ij14. Устройство вывода сигналов 3ij5 преобразует сигналы второй пары однокристальных микроконтроллеров 3ij13, 3ij14 в сигналы телеуправления объектов управления.
Каждое автоматизированное рабочее место 1i, i=1…R подключено к каждой локальной сети 2i, i=1…L. Каждая локальная сеть 2i, i=1…L подключена к каждому вычислительному устройству 3ij, i=1…M, j=1…N.
Каждое вычислительное устройство 3ij, i=1…M, j=1…N определенного типа соответствует одному элементу путевого развития объекта автоматизации. Вычислительные устройства 3ij, i=1…M, j=1…N соединяются между собой каналами связи 4i, i=1…Z в соответствии со связями элементов путевого развития объекта автоматизации, каждое вычислительное устройство 3ij, i=1…M, j=1…N соединяется с соответствующими объектами контроля 5ij, i=1…S, j=1…N, и управления 6ij, i=1…U, j=1…N.
Элементами путевого развития объекта автоматизации могут быть: входной светофор, выходной светофор, маневровый светофор, участок пути, приемо-отправочный путь, стрелка и другие.
Гибридное устройство маршрутизации работает следующим образом.
Сигналы телесигнализации от объектов контроля 5ij, i=1…S, j=1…N поступают в вычислительные устройства 3ij, i=1…M, j=1…N и далее, по каналам связи 4i, i=1…Z, передаются в другие вычислительные устройства 3ij, i=1…M, j=1…N и через локальные вычислительные сети 2i, i=1…L в автоматизированные рабочие места 1i, i=1…R.
Команды телеуправления формируются автоматизированными рабочими местами 1i, i=1…R. Команды телеуправления через локальные вычислительные сети 2i, i=1…L поступают в вычислительные устройства 3ij, i=1…M, j=1…N. В вычислительных устройствах 3ij, i=1…M, j=1…N осуществляется проверка условий возможности выполнения команды в данный момент времени и, в случае возможности выполнения команды, осуществляется передача сигналов телеуправления на объекты управления 6ij, i=1…U, j=1…N.
Таким образом, в зависимости от сигналов телесигнализации осуществляется блокировка или формирование сигналов телеуправления на объекты управления.
Использование гибридного устройства маршрутизации имеет следующие достоинства:
• построение системы управления для конкретного объекта автоматизации осуществляется путем выбора необходимых вычислительных устройств, соответствующих элементам путевого развития и соединения их между собой каналами связи в соответствии со связями элементов путевого развития объекта автоматизации, в результате отсутствует необходимость разработки сложного программного обеспечения функциональных зависимостей объекта автоматизации;
• формирование функциональных зависимостей всего объекта автоматизации осуществляется несколькими вычислительными устройствами, каждое из которых осуществляет функциональные зависимости для одного элемента путевого развития;
• сокращаются сроки и стоимость ввода в эксплуатацию объекта автоматизации ввиду отсутствия необходимости разработки сложного программного обеспечения функциональных зависимостей объекта автоматизации;
• при изменении путевого развития станции, изменение функциональных зависимостей объекта автоматизации осуществляется путем изменения количества и типов вычислительных устройств, а также соединения их между собой каналами связи в соответствии со связями элементов путевого развития объекта автоматизации;
• возможно применение устройства на сколь угодно крупной станции, так как с увеличением элементов путевого развития увеличивается и количество вычислительных устройств.
Таким образом, предлагаемое устройство является универсальным, и его можно использовать на любом объекте железной дороги (станция, перегон, разъезд, блок-пост, сортировочная горка).
При этом, использование предлагаемого устройства сокращает сроки ввода объекта в эксплуатацию при его первоначальном запуске или при внесении изменений в него.
| название | год | авторы | номер документа |
|---|---|---|---|
| Блочная микропроцессорная централизация (БМПЦ) | 2023 |
|
RU2803696C1 |
| Релейно-процессорная электрическая централизация | 2023 |
|
RU2814418C1 |
| Система диспетчерской централизации | 2024 |
|
RU2833087C1 |
| ЦЕНТРАЛИЗОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА С РАСПРЕДЕЛЕННЫМИ КОНТРОЛИРУЕМЫМИ ПУНКТАМИ | 2003 |
|
RU2240245C1 |
| Унифицированный логический контроллер | 2019 |
|
RU2710502C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ ОТ ПОДВИЖНОГО СОСТАВА УЧАСТКОВ ПУТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕГОНЕ | 2012 |
|
RU2511760C1 |
| Модуль безопасного сопряжения | 2019 |
|
RU2710978C1 |
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОЙ ПОДВИЖНОЙ ЕДИНИЦЫ | 2014 |
|
RU2564295C1 |
| СИСТЕМА ПОЛУАВТОМАТИЧЕСКОЙ БЛОКИРОВКИ ДЛЯ ОГРАНИЧЕННЫХ ПО ДЛИНЕ МЕЖСТАНЦИОННЫХ ПЕРЕГОНОВ | 2012 |
|
RU2514384C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
Изобретение относится к средствам железнодорожной автоматики для регулирования движения. Устройство состоит из автоматизированных рабочих мест 1i, i=1…R, локальных вычислительных сетей 2i, i=1…L, N вычислительных устройств M типов 3ij, i=1…M, j=1…N, Z каналов связи 4i, i=1…Z, объектов контроля 5ij, i=1…S, j=1…N, объектов управления 6ij, i=1…U, j=1…N. N – количество элементов путевого развития, M – количество типов элементов путевого развития объекта автоматизации. Причем вычислительные устройства соединяются между собой каналами связи в соответствии со связями элементов путевого развития объекта автоматизации и содержат первую и вторую пару однокристальных микроконтроллеров, устройство сравнения, приемо-передатчик, устройство ввода сигналов и устройство вывода сигналов, причем первая пара однокристальных микроконтроллеров подключена к локальным вычислительным сетям, к каналам связи, к устройству сравнения и к приемо-передатчику, устройство сравнения подключено к приемо-передатчику, вторая пара однокристальных микроконтроллеров подключена к приемо-передатчику и к устройству вывода сигналов, устройство ввода сигналов подключено ко второй паре однокристальных микроконтроллеров, каждое вычислительное устройство соединяется с соответствующими объектами контроля и управления. Достигается расширение арсенала технических средств. 2 ил.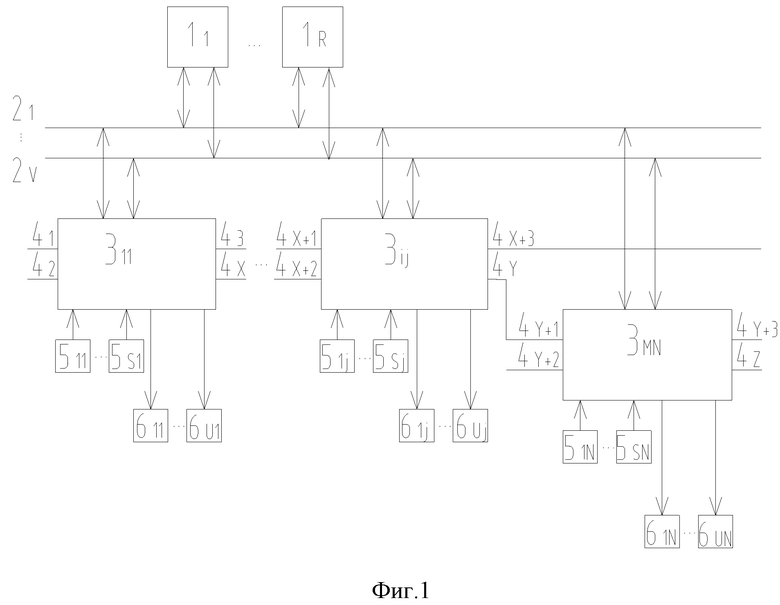
Гибридное устройство маршрутизации, содержащее автоматизированное рабочее место дежурного по станции, объекты контроля, объекты управления, отличающееся тем, что оно дополнительно содержит L локальных вычислительных сетей, N вычислительных устройств M типов, Z каналов связи, причем каждое автоматизированное рабочее место подключено к каждой локальной сети, каждая локальная сеть подключена к каждому вычислительному устройству, каждое вычислительное устройство соответствует одному элементу путевого развития и осуществляет функциональные зависимости для одного элемента путевого развития объекта автоматизации, вычислительные устройства соединяются между собой каналами связи в соответствии со связями элементов путевого развития объекта автоматизации и содержат первую и вторую пару однокристальных микроконтроллеров, устройство сравнения, приемо-передатчик, устройство ввода сигналов и устройство вывода сигналов, причем первая пара однокристальных микроконтроллеров подключена к локальным вычислительным сетям, к каналам связи, к устройству сравнения и к приемо-передатчику, устройство сравнения подключено к приемо-передатчику, вторая пара однокристальных микроконтроллеров подключена к приемо-передатчику и к устройству вывода сигналов, устройство ввода сигналов подключено ко второй паре однокристальных микроконтроллеров, каждое вычислительное устройство соединяется с соответствующими объектами контроля и управления.
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЦЕНТРАЛИЗАЦИИ СТРЕЛОК И СИГНАЛОВ | 2011 |
|
RU2495778C2 |
| Способ контроля износа долота | 1956 |
|
SU107753A1 |
| ЦЕНТРАЛИЗОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА С РАСПРЕДЕЛЕННЫМИ КОНТРОЛИРУЕМЫМИ ПУНКТАМИ | 2003 |
|
RU2240245C1 |
| СПОСОБ ГИБРИДНОЙ КОММУТАЦИИ И АДАПТИВНОЙ МАРШРУТИЗАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2305374C1 |
| US 6032905 A1, 07.03.2000. | |||

