Изобретение относится к способу и устройству датчика для определения величины целевых частиц на контактной поверхности, прилегающей к пробоотборной камере, в которой могут обеспечиваться целевые частицы. Помимо этого, изобретение относится к использованию такого устройства.
US 2005/213204 A1 описывает систему трехмерного конфокального микроскопа для выполнения обработки изображений на основе данных съема изображения срезовых изображений пробы, выведенной из конфокального сканера, и, таким образом, получения трехмерного изображения пробы.
WO 91/03728 описывает систему химического датчика направляемой оптической волны, выполненную с возможностью измерения концентрации химических частиц в присутствии тонкой пленки загрязняющих поверхность веществ на волноводе.
US 2005/0048599 A1 раскрывает оптический способ для исследования микроорганизмов, которые метятся с помощью частиц, так что на них может действовать (например, магнитная) сила. В одном варианте осуществления этого способа световой луч направляется через прозрачный материал к поверхности, где он испытывает полное внутреннее отражение. Свет этого луча, который покидает прозрачный материал как быстро затухающая волна, рассеивается микроорганизмами и/или другими компонентами на поверхности и затем обнаруживается фотодетектором или используется, чтобы высвечивать микроорганизмы для визуального наблюдения.
Более того, из WO 2005/010543 A1 и WO 2005/010542 A2 известно устройство магнитного датчика (которые включаются в настоящую заявку по ссылке), которое может, например, использоваться в микрожидкостном биодатчике для обнаружения молекул, например биологических молекул, помеченных с помощью магнитных бусин. Устройство магнитного датчика обеспечивается матрицей блоков датчика, содержащих провода для генерирования магнитного поля и гигантских магнитных сопротивлений (GMR) для обнаружения полей утечки, сгенерированных намагниченными бусинами. Сигнал GMR при этом показывает количество капель рядом с блоком датчика.
Исходя из описанной ситуации, цель настоящего изобретения представляет собой обеспечение альтернативного средства для определения величины целевых частиц в зоне пробоотборной камеры, в частности на контактной поверхности, с улучшенной точностью и надежностью.
Эта цель достигается посредством устройства датчика по п. 1 формулы изобретения, способа по п. 9 формулы изобретения и применения по п. 14 формулы изобретения. Предпочтительные варианты осуществления раскрываются в зависимых пунктах формулы изобретения.
Устройство датчика согласно настоящему изобретению служит для определения величины целевых частиц на контактной поверхности, прилегающей к пробоотборной камере, в которой может обеспечиваться проба с упомянутыми целевыми частицами.
Термин "целевая частица" относится в этом контексте к любой связанной части материала, который подлежит обнаружению, такого как, например, биологическое вещество (биомолекула, комплекс, клеточная фракция, клетка и т.д.). Предпочтительно "целевая частица" содержит интересующее вещество и ассоциированную помечающую частицу (атом, молекула, комплекс, наночастица, микрочастица и т.д.), которое обладает некоторым свойством (например, оптической плотностью, магнитной восприимчивостью, электрическим зарядом, флуоресценцией, радиоактивностью и т.д.), которое может обнаруживаться, таким образом, косвенно выявляя присутствие интересующего ассоциированного вещества. Более того, целевые частицы, подлежащие определению, могут все быть одного и того же типа или разных типов (например, разные биомолекулы).
"Пробоотборная камера" является обычно пустой полостью или полостью, заполненной некоторым веществом, таким как гель, которое может абсорбировать вещество пробы; она может быть открытой полостью, закрытой полостью или полостью, соединенной с другими полостями посредством каналов соединения текучей среды.
"Контактная поверхность" является границей раздела между пробоотборной камерой и другим компонентом, например прозрачным носителем или некоторой (например, полупроводниковым) подложкой, на которой целевые частицы могут собираться.
В заключение следует отметить, что "величина целевых частиц" может выражаться различными соответствующими способами, например, как абсолютное количество или полная масса целевых частиц (в заданном объеме), или как плотность (т.е. количество или масса целевых частиц в расчете на единичную область или объем).
Устройство датчика содержит следующие компоненты:
a) элемент датчика для обнаружения целевых частиц в пробоотборной камере и для обеспечения, по меньшей мере, одного соответствующего сигнала датчика (при этом термин "сигнал датчика" должен в последующем использоваться как однозначное указание на этот конкретный сигнал элемента датчика). Как будет иллюстрироваться по отношению к предпочтительным вариантам осуществления этого изобретения, элемент датчика может обеспечивать обнаружение целевых частиц посредством любого подходящего способа или принципа, например, посредством оптических, магнитных, механических, акустических, термических и/или электрических измерений.
Сигнал датчика обычно представляет собой электрический сигнал, соответствующий скалярному значению, которое относится к величине целевых частиц в некоторой области пробоотборной камеры;
b) блок оценки для определения величины целевых частиц в "первой зоне" и в другой "второй зоне" на основе упомянутого, по меньшей мере, одного сигнала датчика, при этом "первая зона" по определению является подобластью пробоотборной камеры, которая размещается непосредственно на контактной поверхности, и при этом "вторая зона" по определению является подобластью пробоотборной камеры, которая размещается на ненулевом расстоянии от контактной поверхности, т.е. отделена от контактной поверхности посредством некоторого промежуточного пространства. Первая и вторая зоны часто являются неперекрывающимися, хотя в общем случае допускается ограниченная величина перекрытия. Более того, величина целевых частиц в первой и/или второй зоне может определяться непосредственно или косвенно, т.е. блок оценки может обеспечивать значения, которые непосредственно представляют упомянутые величины, или значения, которые только неявно зависят от упомянутых величин. Блок оценки может, например, обеспечивать одиночное выходное значение, которое напрямую представляет величину целевых частиц в первой зоне, прилегающей к контактной поверхности, при этом это значение определяют посредством принятия в рассмотрение величины целевых частиц во второй зоне (например, как корректирующий коэффициент).
В заключение следует отметить, что блок оценки может реализовываться посредством специализированного электронного аппаратного обеспечения, аппаратного обеспечения для обработки цифровых данных с соответствующим программным обеспечением или их комбинации.
Описанное устройство датчика обеспечивает преимущество, заключающееся в том, что величина целевых частиц (непосредственно или косвенно) оценивается в двух разных зонах, именно первой зоне, прилегающей к контактной поверхности - которая обычно является зоной первичного интереса, например, если биологические целевые молекулы ограничиваются конкретными сайтами связывания на контактной поверхности, - и одновременно в другой второй зоне. Вследствие своей удаленности от контактной поверхности вторая зона обеспечивает информацию о величине или концентрации целевых частиц в объемной пробе. Эта информация является очень ценной во многих случаях, так как величины целевых частиц в двух зонах обычно имеют сильную взаимозависимость, так что корректные заключения по измерениям требуют принятия в рассмотрение обоих величин. В конкурентном анализе, в котором биомолекулы конкурируют с сайтами связывания на контактной поверхности за целевые частицы, величина биомолекул может, например, корректно определяться, только если обе величины связанных целевых частиц (первая зона) и свободных целевых частиц (вторая зона) известны.
Конкретные варианты реализации устройства датчика могут быть выполнены во множестве различных форм. Одна большая группа вариантов реализации ("подход с двумя сигналами датчика") отличается тем, что элемент датчика обеспечивает, по меньшей мере, два сигнала датчика, которые разным образом относятся или являются чувствительными к величине целевых частиц в первой зоне и второй зоне, соответственно. Комбинирование этих, по меньшей мере, двух сигналов датчика соответствующим способом может, таким образом, выявлять величину целевых частиц в первой зоне и/или второй зоне. Одна непосредственная реализация этого подхода использует элемент датчика, который может осуществлять измерение в двух зонах с разными чувствительностями, например, обеспечивая первый сигнал датчика, измеренный с высокой чувствительностью в первой зоне и низкой чувствительностью во второй зоне, и второй сигнал датчика, полученный противоположным образом.
Во многих вариантах осуществления вышеупомянутого случая блок оценки может быть выполнен с возможностью определения взвешенной разницы упомянутых, по меньшей мере, двух сигналов датчика (или, эквивалентно, линейной комбинации всех сигналов датчика). Таким образом, простая математическая операция часто будет уже достаточной для извлечения интересующей информации.
Согласно другому варианту осуществления этого изобретения, пробоотборная камера содержит зону исключения, прилегающую к части контактной поверхности, в которую по определению не могут входить целевые частицы. Выполнение в такой зоне исключения измерений с помощью элемента датчика может способствовать более четкому определению различий между первой и второй зоной в сигнале (сигналах) датчика.
В последующем будут описываться более подробно конкретные реализации "подхода с двумя сигналами датчика", которые основываются на оптических измерениях. В этих вариантах осуществления элемент датчика содержит:
a) по меньшей мере, один источник света для излучения двух световых лучей, которые в последующем называются "входные световые лучи", так что они полностью внутренне отражаются при разных условиях на контактной поверхности, давая соответствующие "выходные световые лучи".
Следует отметить, что различие между двумя входными световыми лучами может быть чисто концептуальным, т.е. фотоны, испущенные одним и тем же источником света, могут приписываться первому или второму входному световому лучу, соответственно, согласно некоторому заданному критерию, например, их длине волны в случае полихроматического источника света.
Источник света может, например, содержать лазер или излучающий свет диод (LED), необязательно снабженный оптикой для придания формы и направления входных световых лучей. Более того, следует отметить, что наступление полного внутреннего отражения требует, чтобы преломляющий индекс среды, в которой входные световые лучи распространяются к контактной поверхности, был больше, чем преломляющий индекс материала, прилегающего к контактной поверхности (обычно пробы). Это имеет место, например, в случае, если среда распространения света выполнена из стекла (n=1,6-2) и прилегающий материал является водой (n=1,3). Следует дополнительно отметить, что термин "полное внутреннее отражение" должен включать в себя случай, называемый "нарушенное полное внутреннее отражение", где некоторое количество падающего света теряется (абсорбируется, рассеивается и т.д.) в течение процесса отражения;
b) по меньшей мере, один световой детектор для определения величины света в выходных световых лучах и для обеспечения соответствующих сигналов датчика. Световой детектор может содержать любой подходящий датчик или множество датчиков, посредством которых свет заданного спектра может обнаруживаться, например фотодиоды, фоторезисторы, фотоэлементы, чип CCD или фотоэлектронный умножитель. "Величина света" может, например, выражаться посредством интенсивности света выходных световых лучей в, по меньшей мере, части их поперечного сечения.
Оптические измерения с полным внутренним отражением имеют преимущества, что они могут делаться без физического контакта с пробой, что они являются независимыми от, например, магнитных манипуляций целевыми частицами и что они могут ограничиваться только маленьким объемом, прилегающим к контактной поверхности.
Вышеупомянутое ограничение описанных оптических измерений до маленького объема на контактной поверхности - следствие факта, что в процессе полного внутреннего отражения генерируются быстро затухающие волны, которые проникают, экспоненциально затухая, в прилегающую среду, т.е. пробу. Требуемые разные условия, при которых два входных световых луча полностью внутренне отражаются, будут, таким образом, предпочтительно такими, что быстро затухающие волны имеют разные расстояния затухания (которые определяются как расстояние, где амплитуды быстро затухающих волн падают до 1/e≈37%). Быстро затухающие волны при этом зондируют объемы разных толщин, прилегающих к контактной поверхности, что может использоваться, чтобы извлекать информацию о целевых частицах в первой и второй зоне, соответственно.
Два входных световых луча могут предпочтительно иметь разный спектральный состав и/или углы падения на контактную поверхность. Этими двумя параметрами можно легко управлять, и они имеют определяющее влияние на расстояние затухания быстро затухающих волн.
В последующем, будут более подробно описываться конкретные варианты реализации "подхода с двумя сигналами датчика", которые основываются на магнитном обнаружении "магнитных целевых частиц", т.е. целевых частиц, которые являются магнитными или могут намагничиваться. Базовый вариант осуществления такого устройства магнитного датчика содержит:
a) по меньшей мере, один генератор магнитного поля для генерирования, по меньшей мере, двух магнитных полей возбуждения разной конфигурации в пробоотборной камере. В этом контексте два магнитных поля рассматриваются как имеющие "разную конфигурацию", если векторы их магнитной индукции внутри пробоотборной камеры не являются пропорциональными друг с другом с единственным, глобальным коэффициентом пропорциональности;
b) элемент магнитного датчика для обнаружения магнитных реакционных полей, сгенерированных магнитными целевыми частицами в виде реакции на вышеупомянутые магнитные поля возбуждения и для обеспечения соответствующих сигналов датчика. Элемент магнитного датчика может содержать любое устройство, которое подходит для обнаружения магнитных полей, например, катушку, датчик Холла, плоский датчик Холла, чувствительный прибор для обнаружения неоднородностей магнитного поля, SQUID (сверхпроводящий квантовый интерферометр), датчик магнитного резонанса, магнито-ограничительный датчик или магниторезистивный датчик типа, описанного в WO 2005/010543 A1 или WO 2005/010542 A2, особенно GMR (гигантское магнитное сопротивление), TMR (туннельное магнитное сопротивление) или AMR (анизотропное магнитное сопротивление).
Посредством обеспечения магнитных полей возбуждения с разными конфигурациями, описанное устройство магнитного датчика является способным обнаруживать целевые частицы в пробоотборной камере с разной чувствительностью в первой и второй зоне, соответственно.
Генератор магнитного поля может предпочтительно содержать, по меньшей мере, два проводящих провода, на которые могут избирательно подаваться токи возбуждения для генерирования магнитных полей возбуждения и которые имеют разное геометрическое расположение по отношению к элементу магнитного датчика. Таким образом, могут легко генерироваться магнитные поля возбуждения разной конфигурации, что обеспечивает возможность избирательного зондирования первой и второй зоны.
В другом варианте осуществления устройство магнитного датчика может содержать пары проводящих проводов, при этом проводящие провода каждой пары располагаются симметрично по отношению к элементу магнитного датчика. Такое симметричное расположение имеет преимущество, заключающееся в том, что некоторые нежелательные эффекты (например, перекрестная помеха) будут взаимно компенсироваться.
До настоящего времени в отношении контактной поверхности только предполагалось, что она является некоторой границей раздела с пробоотборной камерой, где могут собираться целевые частицы. В предпочтительных вариантах осуществления этого изобретения контактная поверхность будет дополнительно содержать сайты связывания для целевых частиц. Сайты связывания могут, например, быть биологическими молекулами (например, антителами), с которыми могут специфически связываться некоторые целевые частицы (например, антигены). Помимо лишения подвижности целевых частиц на контактной поверхности для легкого обнаружения, важным назначением сайтов связывания часто является, поэтому, конкретный выбор интересующих конкретных молекул из сложной смеси.
В другом варианте осуществления этого изобретения устройство датчика может содержать устройство манипулирования для активного перемещения целевых частиц. Устройство манипулирования может, в частности, содержать генератор магнитного поля, например электромагнит, для воздействия магнитными силами (посредством полевых градиентов) на магнитные целевые частицы. Манипулирование может, например, использоваться, чтобы перемещать целевые частицы ускоренным способом к контактной поверхности.
В сочетании с контактной поверхностью, которая покрывается сайтами связывания, вышеупомянутое устройство манипулирования может быть необязательно выполнено с возможностью удаления целевых частиц, которые не связаны с сайтами связывания, из чувствительной области элемента датчика. Таким образом, может выполняться процесс промывания, оставляя в области, которая может наблюдаться элементом датчика, только связанные целевые частицы.
В последующем будет описываться другая большая группа вариантов реализации, в которых блок оценки выполнен с возможностью оценки временного курса упомянутого, по меньшей мере, одного сигнала датчика ("подход временного анализа"). Это требует, чтобы были доступными, по меньшей мере, два значения сигнала датчика, полученного в разных точках во времени, (предпочтительно сигнал датчика является непрерывным или квазинепрерывным по времени). В этих вариантах осуществления информация о первой зоне и второй зоне пробоотборной камеры извлекается из временной вариантности сигнала (сигналов) датчика. Следует отметить, что границы между "подходом двух сигналов датчика" и "подходом временного анализа" являются нечеткими и в значительной степени зависят от определения сигнала (сигналов) датчика. Таким образом, каждый сигнал датчика с временным курсом может при некотором типе демультиплексирования произвольным образом разделяться на первый сигнал датчика, соответствующий первому временному интервалу, и второй сигнал датчика, соответствующий второму временному интервалу. В контексте настоящего изобретения предположение с использованием "подхода двух сигналов датчика" является предпочтительным, если элемент датчика выполняет измерения при разных рабочих условиях (например, со светом разных длин волны или с магнитными полями разной конфигурации), в то время как "подход временного анализа" указывает более на ситуации, в которых причины для изменений сигнала лежат внутри пробы (например, перемещения целевых частиц).
Один из вариантов осуществления с использованием "подхода временного анализа" связан с вышеописанной возможностью удалять свободные (несвязанные) целевые частицы из чувствительной области элемента датчика с помощью устройства манипулирования. Таким образом, временной курс сигнала датчика может соответствовать (i) в первый временной момент ситуации, в которой непривязанные целевые частицы присутствуют, и (ii) во второй временной момент ситуации, в которой они удаляются из полной чувствительной области элемента датчика, т.е. в которой присутствуют только целевые частицы, привязанные к сайтам связывания на контактной поверхности. Измерения в двух временных моментах будут, поэтому, обеспечивать возможность выводить требуемые величины целевых частиц в первой и второй зоне, соответственно.
В другой важной реализации "подхода временного анализа" временная оценка сигнала датчика происходит по отношению к стохастическим перемещениям целевых частиц. Так как эти частицы обычно являются микроскопическими сущностями, такими как атомы, молекулы, комплексы или клетки, они будут подвержены стохастическим перемещениям в жидкой пробе, что известно как "броуновское движение". Эти перемещения обычно являются разными в первой и второй зоне, соответственно, и могут, поэтому, использоваться для извлечения информации об этих зонах. Если целевые частицы являются, например, связанными в первой зоне на контактной поверхности, их стохастические перемещения будут там приблизительно нулевыми.
Согласно предпочтительному варианту осуществления вышеупомянутого устройства датчика блок оценки может быть выполнен с возможностью определения мощности шума сигнала датчика (которая обычно относится к величине целевых частиц во второй зоне). Это определение факультативно делается после фильтрации верхних частот для удаления медленных изменений (вследствие, например, процесса привязки). Мощность шума переменного по времени сигнала s(t) со средним значением <s>=0 может определяться посредством формулы
В другом варианте осуществления блок оценки может быть выполнен с возможностью определения среднего количества целевых частиц во второй зоне и дисперсию этого количества. Так как кластеризация целевых частиц увеличивает дисперсию, упомянутая кластеризация может обнаруживаться, если как среднее количество, так и дисперсия известны.
Другими словами, блок оценки устройства датчика может быть выполнен с возможностью вывода информации о величине кластеризованных целевых частиц, о покрытии контактной поверхности (например, посредством воздушных пузырьков) и/или о диффузионных характеристиках целевых частиц. Они являются примерами параметров, которые могут использоваться для увеличения точности измерений.
Это изобретение дополнительно относится к способу для определения величины целевых частиц на контактной поверхности, прилегающей к пробоотборной камере, в которой обеспечивается проба с упомянутыми целевыми частицами, при этом способ содержит следующие этапы:
a) обнаружение целевых частиц в пробоотборной камере и обеспечение, по меньшей мере, одного соответствующего сигнала датчика с помощью элемента датчика;
b) прямое или косвенное определение, с помощью блока оценки, величины целевых частиц в первой зоне непосредственно на контактной поверхности и второй зоне на расстоянии от контактной поверхности на основе упомянутого, по меньшей мере, одного сигнала датчика.
Согласно первому предпочтительному варианту осуществления способа обеспечиваются, по меньшей мере, два сигнала датчика, которые проявляют различную чувствительность к величине целевых частиц в первой зоне и второй зоне, соответственно.
В вышеупомянутом случае, по меньшей мере, один из сигналов датчика может относиться к области пробоотборной камеры, которая является свободной от целевых частиц. Эта область может, например, быть зоной исключения, в которую не могут входить целевые частицы, или областью пробоотборной камеры, из которой несвязанные целевые частицы были вымыты.
В подходе с использованием оптического измерения упомянутые два сигнала датчика могут определяться из нарушенного полного внутреннего отражения с быстро затухающими волнами разных расстояний затухания.
Альтернативно два сигнала датчика могут определяться из магнитных реакционных полей магнитных целевых частиц, которые были возбуждены с помощью магнитных полей возбуждения разной конфигурации.
Более того, временной курс упомянутого, по меньшей мере, одного сигнала датчика может оцениваться, в частности, по отношению к стохастическим перемещениям целевых частиц.
Вышеописанные варианты осуществления способа описывают, в общей форме, этапы, которые могут исполняться с устройствами датчика типа, описанного выше. Ссылка, поэтому для получения дополнительной информации о деталях, преимуществах и модификациях этих способов следует обратиться к приведенному выше описанию устройств датчика.
Изобретение дополнительно относится к применению устройства датчика, описанного выше, для молекулярной диагностики, биологического анализа проб или химического анализа проб, анализа пищи и/или судебного анализа. Молекулярная диагностика может, например, выполняться с помощью магнитных бусин или флуоресцентных частиц, которые непосредственно или опосредованно прикрепляются к целевым молекулам.
Эти и другие аспекты настоящего изобретения будут видны из описанного ниже варианта (вариантов) осуществления, и объяснены со ссылкой на него. Эти варианты осуществления будут описываться в качестве примера с помощью сопровождающих чертежей, на которых:
Фиг. 1 схематически показывает устройство оптического датчика согласно настоящему изобретению, которое основано на использовании нарушенного полного внутреннего отражения.
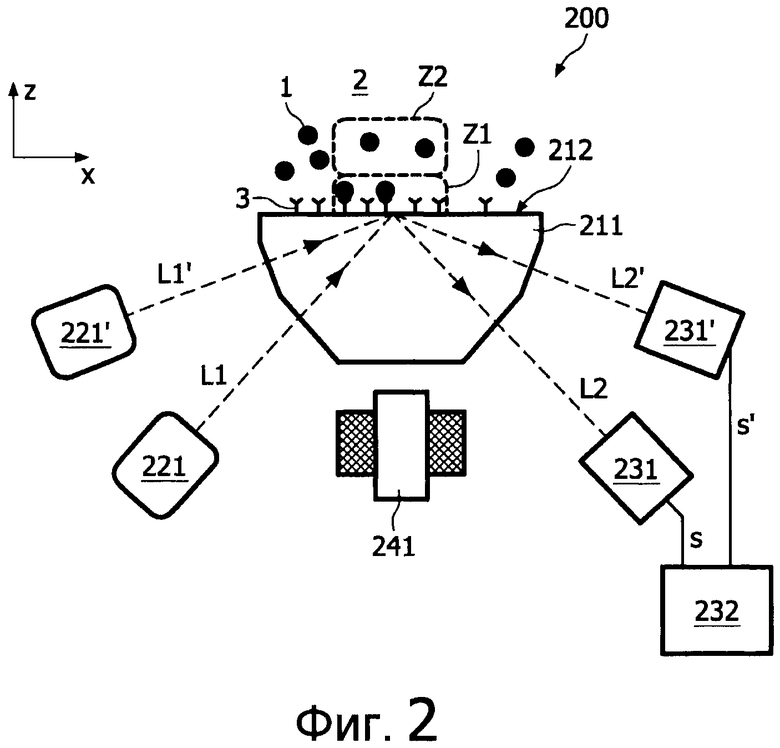
Фиг. 2 показывает модификацию устройства из фиг. 1, в котором используются входные световые лучи с разными углами падения.
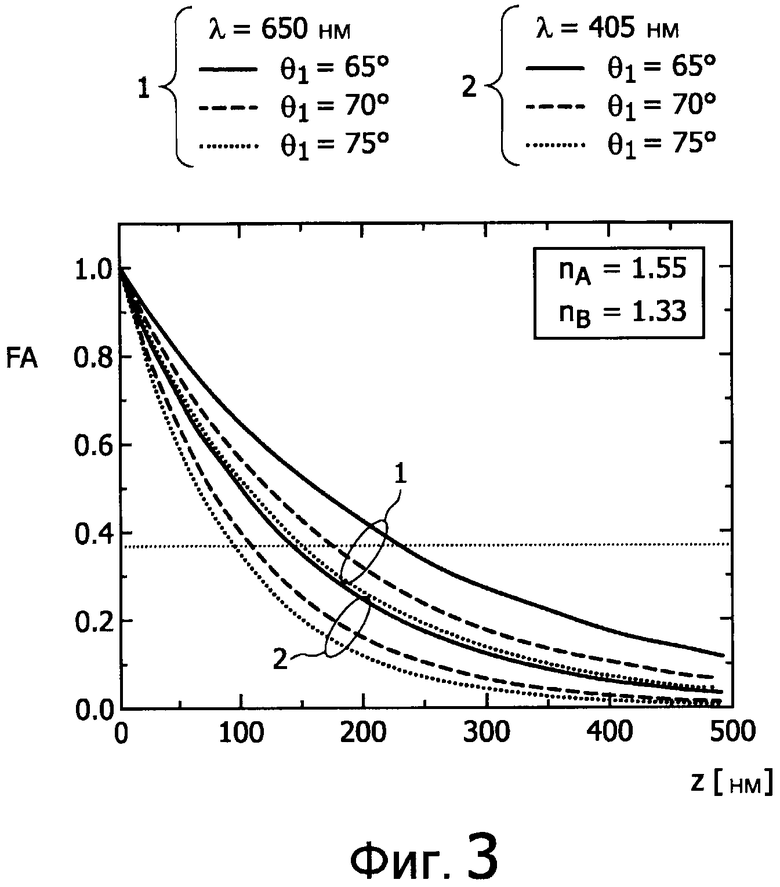
Фиг. 3 показывает полевую амплитуду как функцию расстояния от контактной поверхности для быстро затухающих волн разной длины волны и разных углов падения.
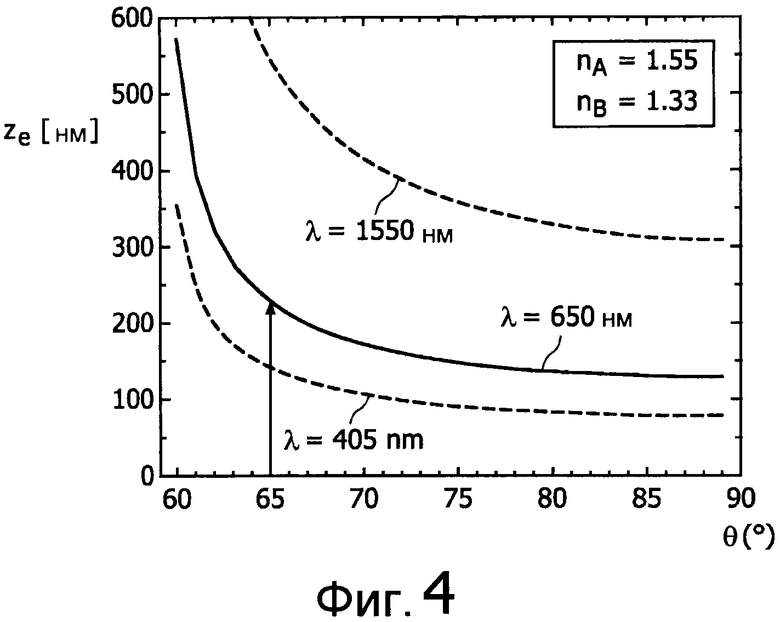
Фиг. 4 показывает расстояния затухания быстро затухающих волн в зависимости от угла падения для разных длин волны.
Фиг. 5 показывает на диаграмме, подобной диаграмме по фиг. 3, полевую амплитуду быстро затухающих волн в зависимости от расстояния от контактной поверхности для угла падения 65° и для двух в значительной степени разных длин волны.
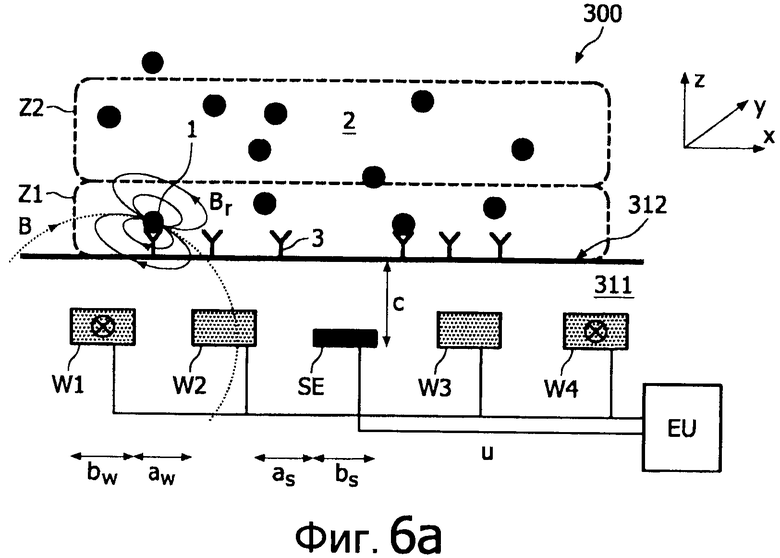
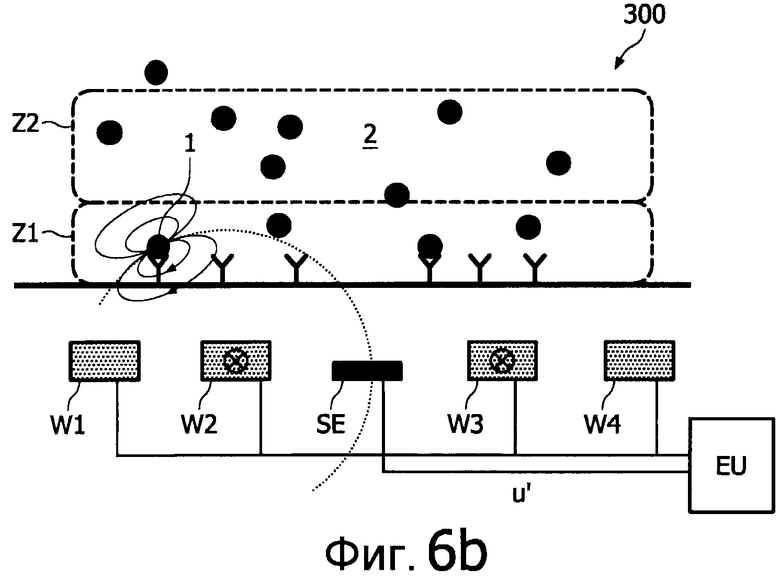
Фиг. 6 показывает (a) первое и (b) второе рабочее состояние устройства магнитного датчика с четырьмя проводящими проводами и датчиком GMR в одной плоскости.
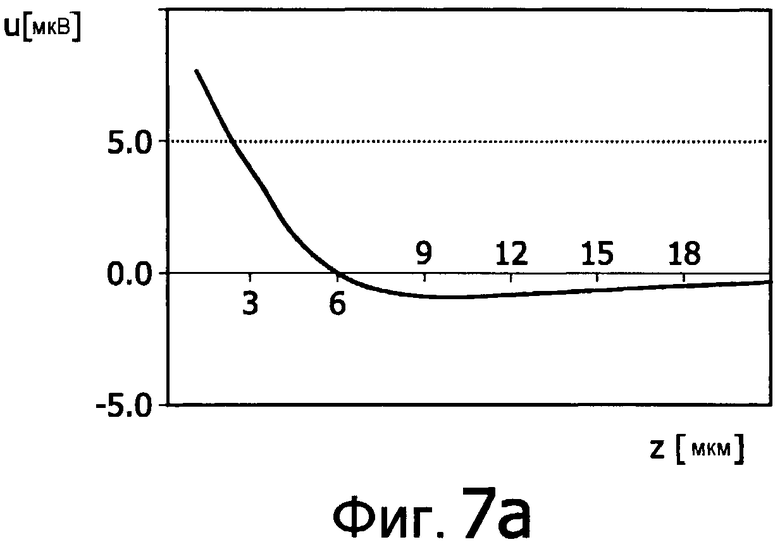
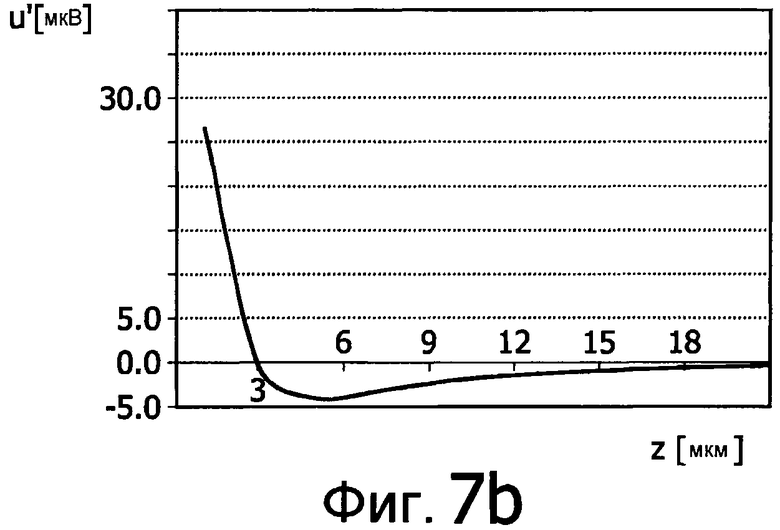
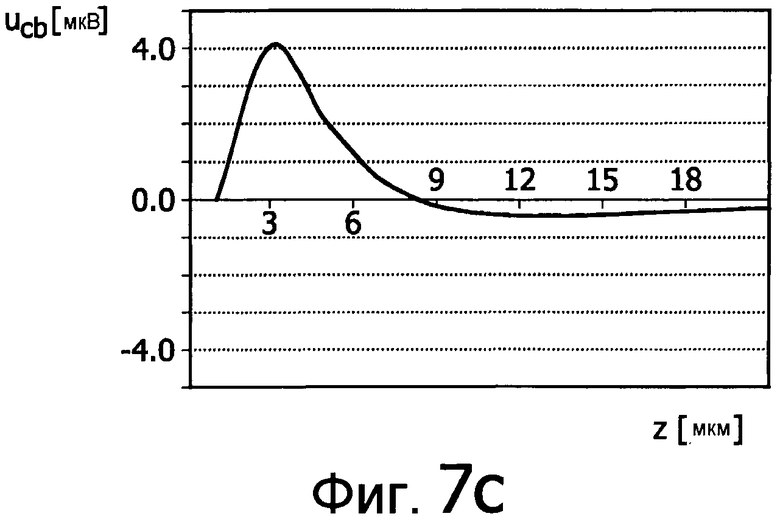
Фиг. 7 показывает сигналы измерения устройства магнитного датчика из фиг. 6 в зависимости от расстояния от контактной поверхности в (a) первом рабочем состоянии и (b) втором рабочем состоянии, также как (c) взвешенную разницу этих данных.
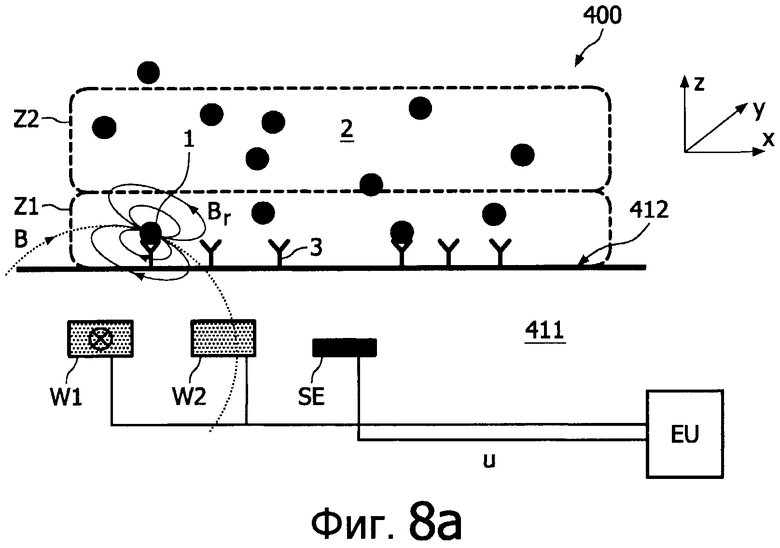
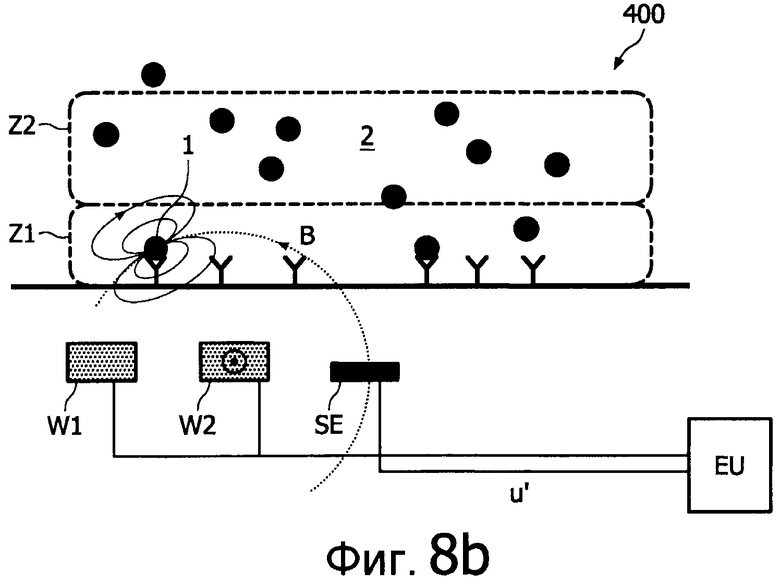
Фиг. 8 показывает (a) первое и (b) второе рабочее состояние устройства магнитного датчика с двумя проводящими проводами на одной стороне датчика GMR.
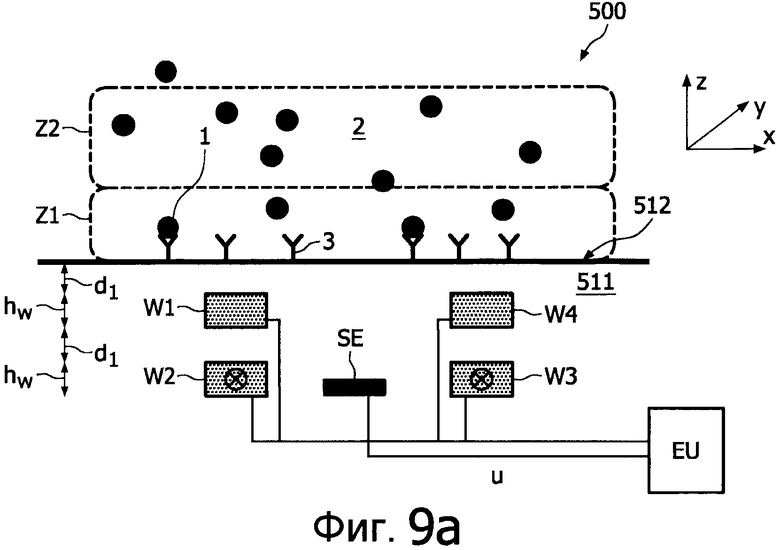
Фиг. 9 показывает (a) первое и (b) второе рабочее состояние устройства магнитного датчика с четырьмя проводящими проводами, расположенными в двух параллельных плоскостях.
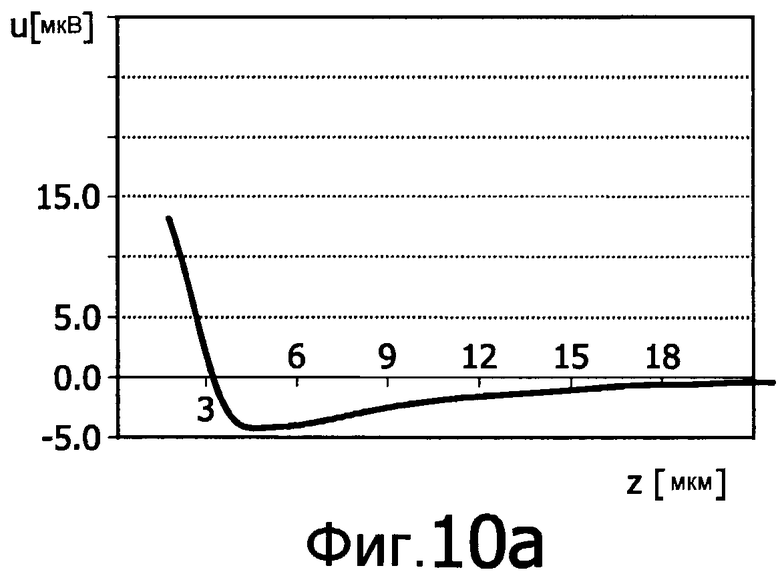
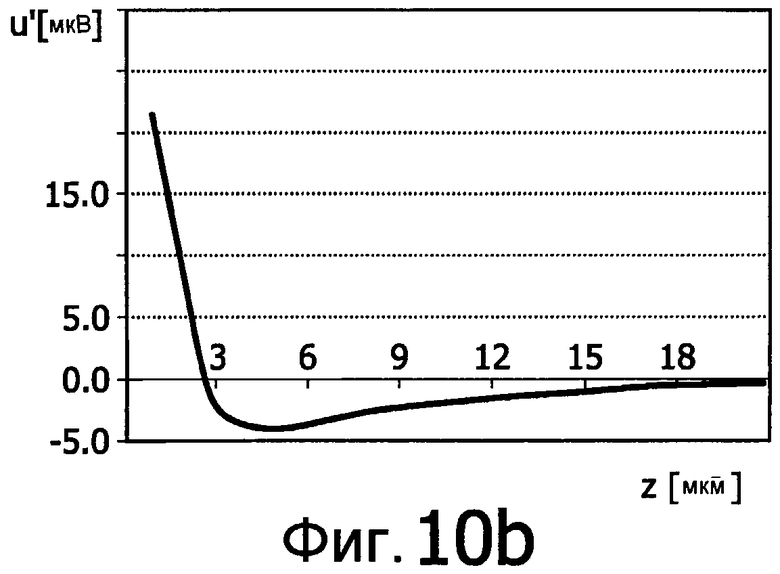
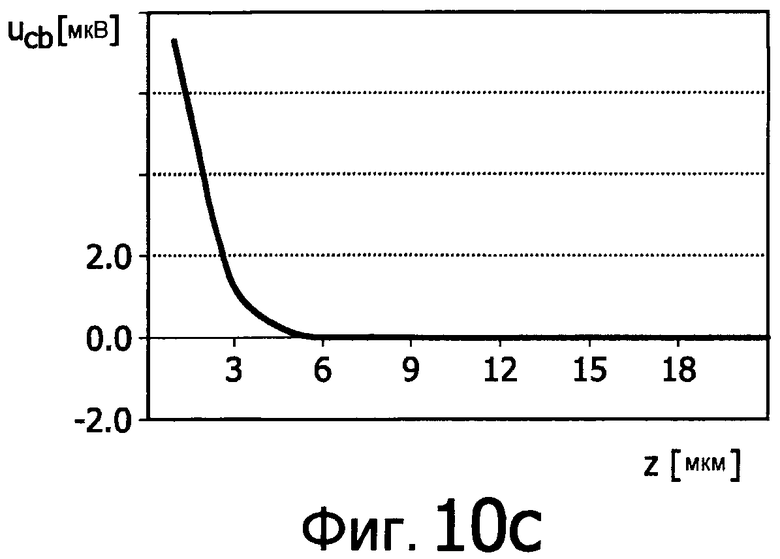
Фиг. 10 показывает сигналы измерения устройства магнитного датчика из фиг. 9 в зависимости от расстояния от контактной поверхности в (a) первом рабочем состоянии и (b) втором рабочем состоянии, также как (c) взвешенную разницу этих данных.
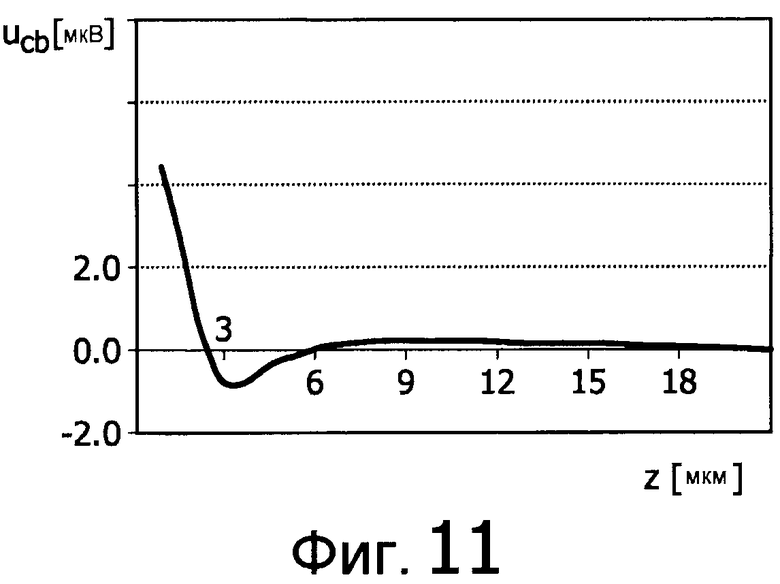
Фиг. 11 показывает диаграмму, соответствующую фиг. 10 c) в случае других геометрических параметров.
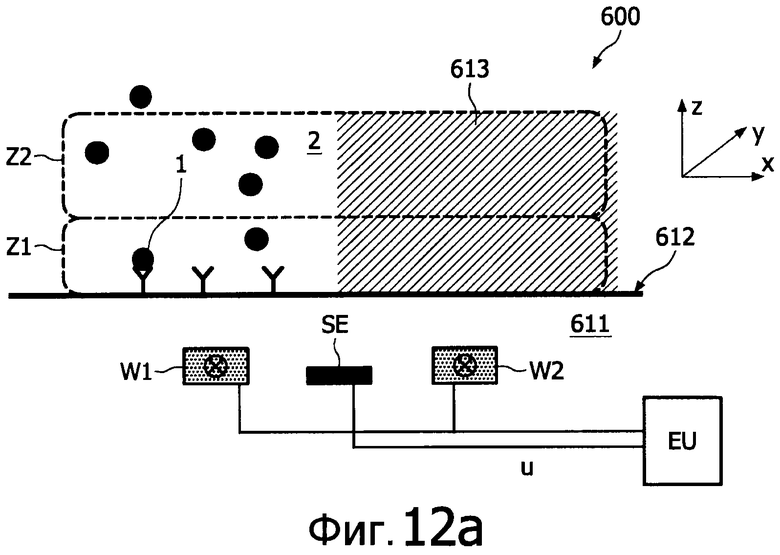
Фиг. 12 показывает (a) первое и (b) второе рабочее состояние устройства магнитного датчика с двумя проводами и датчиком GMR в одной плоскости и зоной исключения полпути выше их.
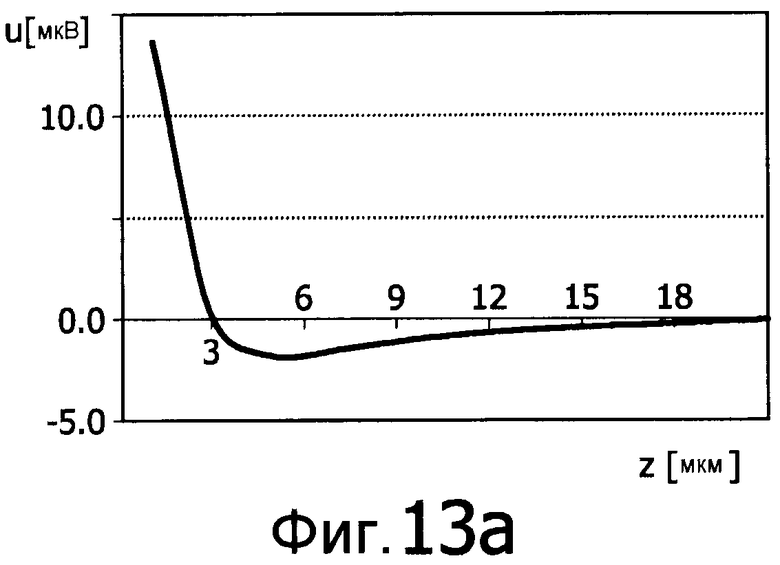
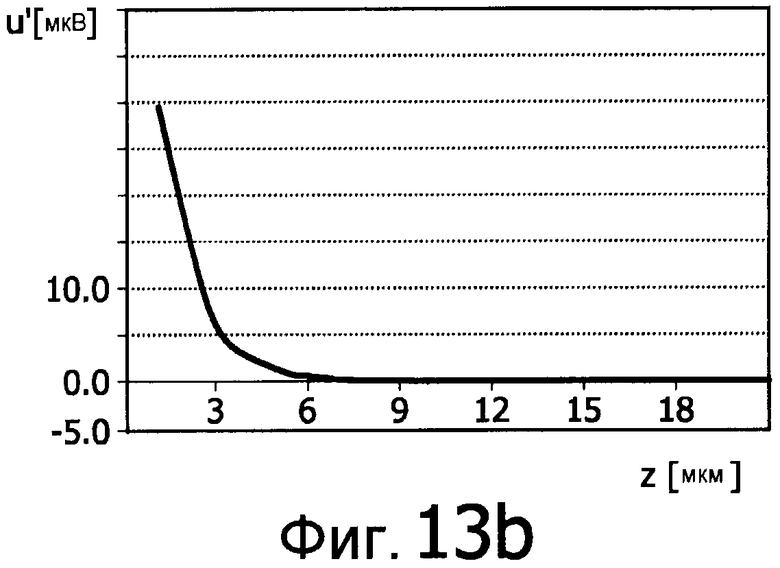
Фиг. 13 показывает сигналы измерения устройства магнитного датчика из фиг. 12 в зависимости от расстояния от контактной поверхности в (a) первом рабочем состоянии и (b) втором рабочем состоянии, также как (c) взвешенную разницу этих данных.
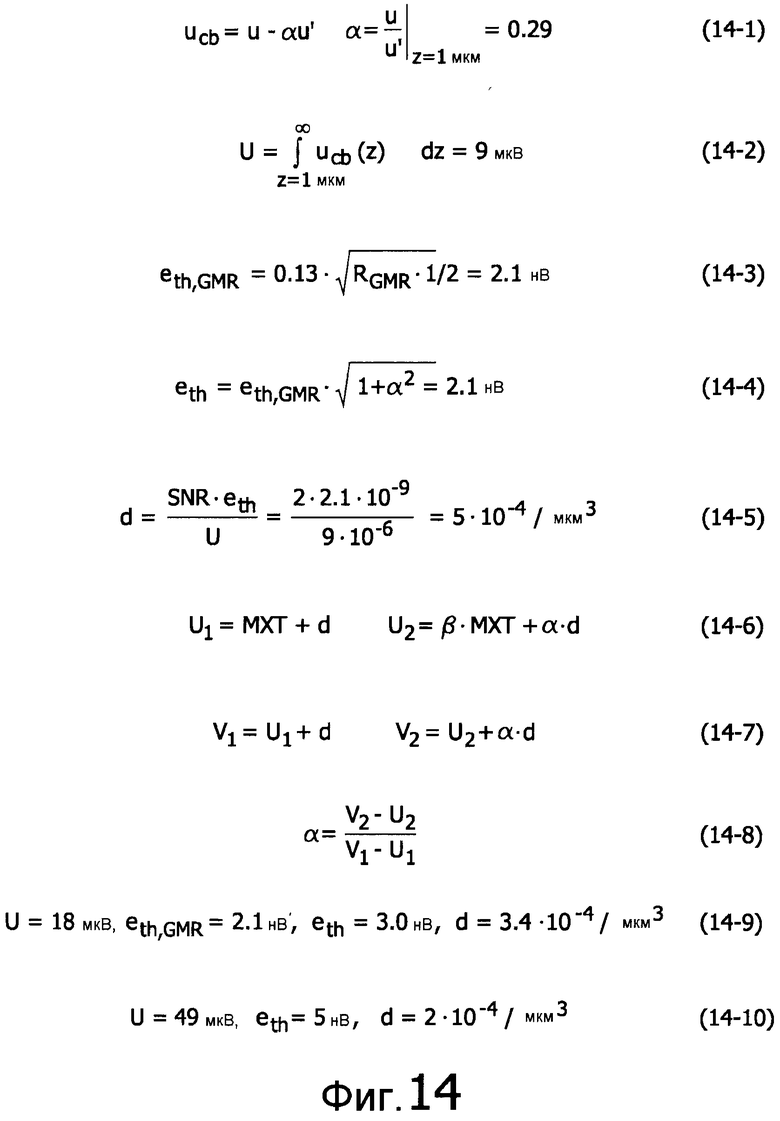
Фиг. 14 представляет собой сводку различных математических выражений, относящихся к устройствам магнитного датчика.
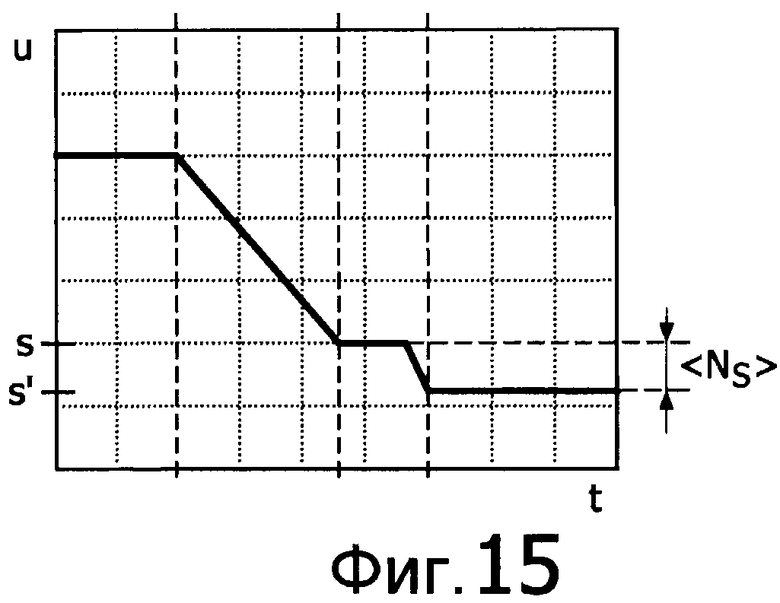
Фиг. 15 показывает нормализованный отклик устройства датчика в течение обычного анализа с измерениями до и после этапа промывания.
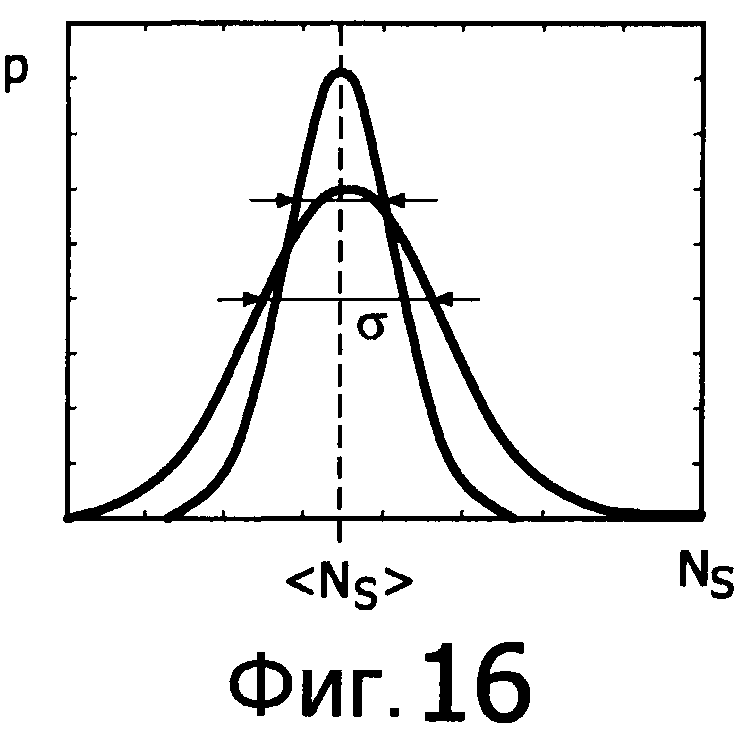
Фиг. 16 иллюстрирует распределение вероятностей количества одиночных целевых частиц в заданном объеме для двух разных степеней кластеризации.
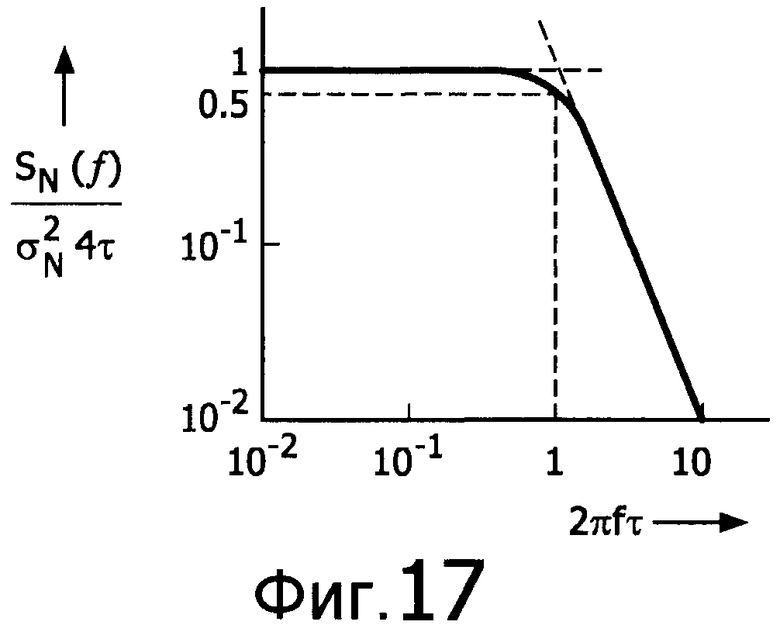
Фиг. 17 показывает спектр Лоренца.
Фиг. 18 представляет собой сводку различных математических выражений, относящихся к стохастической оценке сигналов датчика.
Подобные ссылочные позиции или числовые обозначения, отличающиеся целочисленными, кратными 100, указывают на фигурах на идентичные или аналогичные компоненты.
Биодатчики могут, например, использоваться для придорожного тестирования на запрещенное употребление наркотиков по слюне. Наркотики запрещенного употребления являются, в общем, маленькими молекулами, которые обладают только одним эпитопом и по этой причине не могут обнаруживаться сэндвич-анализом. Конкурентный анализ или анализ подавления является способом, чтобы обнаруживать эти молекулы. Хорошо известный подход конкурентного анализа - присоединение интересующих молекул на контактную поверхность и подготовка целевых частиц посредством связывания антител с меткой обнаружения (например, энзим, флуорофор или магнитная бусина). Эта система используется, чтобы выполнять конкурентный анализ в отношении представляющих интерес молекул в пробе и на поверхности, с использованием помеченных антител (целевых частиц). Очевидно, что величина связанных целевых частиц относится к концентрации целевых частиц, которые были добавлены к пробе. Как следствие, для получения точных количественных результатов количество добавленных целевых частиц должно быть известным априори или определяться в течение измерения.
Вышеописанный сценарий конкурентного анализа иллюстрирует в одном примере, что объемная концентрация целевых частиц (меток) в объеме выше поверхности датчика содержит ценную информацию. В общем, измерения обычно должны калиброваться на величины целевых частиц в растворе. Эта величина является, однако, часто априори неизвестной вследствие изменяющихся свойств повторного диспергирования целевых частиц, высушенных в картридже. Поэтому ниже объясняются различные подходы к определению величины целевых частиц в растворе.
I. Подход с использованием двух сигналов датчика с устройством оптического датчика с использованием FTIR
Фиг. 1 показывает общую конфигурацию установки с устройством 100 датчика согласно настоящему изобретению. Установка содержит носитель 111, который может, например, выполняться из стекла или прозрачного пластика, такого как полистирол. Носитель 111 располагается рядом с пробоотборной камерой 2, в которой может обеспечиваться текучая среда пробы с целевыми компонентами, подлежащими обнаружению (например, наркотики, антитела, DNA и т.д.). Проба дополнительно содержит магнитные частицы, например суперпарамагнитные бусины, при этом эти частицы обычно связываются в качестве меток с вышеупомянутыми целевыми компонентами. Для простоты изложения в последующем комбинация целевых компонентов и магнитных частиц показана на фигуре и будет называться "целевая частица 1". Следует отметить, что вместо магнитных частиц могут также использоваться другие помечающие частицы, например электрически заряженные или флуоресцентные частицы.
Граница раздела между носителем 111 и пробоотборной камерой 2 формируется поверхностью, называемой "контактная поверхность" 112. Эта контактная поверхность 112 покрыта захватывающими элементами 3, например антителами, которые могут специфически связывать целевые частицы.
Устройство датчика содержит генератор 141 магнитного поля, например электромагнит с катушкой и сердечником, для генерирования управляемым образом магнитного поля на контактной поверхности 112 и в прилегающем пространстве пробоотборной камеры 2. С помощью этого магнитного поля может осуществляться манипулирование целевыми частицами 1, т.е. они могут намагничиваться и, в частности, перемещаться (если используются магнитные поля с градиентами). Таким образом, является, например, возможным притягивать целевые частицы 1 к контактной поверхности 112, с целью ускорения их связывания с упомянутой поверхностью или для вымывания несвязанных целевых частиц с контактной поверхности до измерения.
Устройство датчика дополнительно содержит источник 121 света, который генерирует входной световой луч L1, который передается в носитель 111 через "окно входа". В качестве источника 121 света может использоваться лазер или LED, в частности, коммерческий DVD (λ=658 нм) лазерный диод. Для обеспечения параллельности входного светового луча L1 могут использоваться линзы коллиматора, и может использоваться булавочное отверстие, например, 0,5 мм, чтобы уменьшать диаметр луча. Входной световой луч L1 прибывает на контактную поверхность 112 при угле θ, большем, чем критический угол θc полного внутреннего отражения (TIR), и поэтому испытывает полное внутреннее отражение в "выходной световой луч" L2. Выходной световой луч L2 покидает носитель 111 через другую поверхность ("окно выхода") и обнаруживается посредством светового детектора 131. Световой детектор 131 определяет величину света выходного светового луча L2 (например, выраженного посредством интенсивности света этого светового луча в полном спектре или некоторой части спектра). Соответствующий сигнал датчика s оценивается и необязательно наблюдается в течение периода наблюдения посредством модуля 132 оценки и записи блока оценки EU, который соединен с детектором 131.
Является возможным использовать детектор 131 также для отбора света флуоресценции, испущенного флуоресцентными частицами 1, которые были возбуждены входным световым лучом L1, при этом эта флуоресценция может, например, спектрально выделяться из отраженного света L2. Хотя последующее описание концентрируется на измерении отраженного света, принципы, описанные здесь, также могут с соответствующим изменением применяться к обнаружению флуоресценции.
Описанное устройство 100 датчика применяет оптическое средство для обнаружения целевых частиц 1. Для устранения или, по меньшей мере, минимизации влияния фона (например, текучей среды пробы, такой как слюна, кровь и т.д.) способ обнаружения должен быть специфичным для поверхности. Как показано выше, это достигается посредством использования принципа нарушенного полного внутреннего отражения (FTIR). Этот принцип базируется на факте, что быстро затухающая волна затухает (с экспоненциальным уменьшением интенсивности) в пробе 2, когда луч L1 падающего света испытывает полное внутреннее отражение. Если эта быстро затухающая волна затем взаимодействует с другой средой, такой как связанные целевые частицы 1, часть входного света будет проходить в текучую среду пробы (это называется "нарушенное полное внутреннее отражение"), и отраженная интенсивность будет уменьшаться (в то время как отраженная интенсивность будет 100% для чистой границы раздела и без взаимодействия). В зависимости от величины возмущения, т.е. величины целевых частиц на поверхности TIR или очень близко (в пределах около 200 нм) к поверхности TIR (не в оставшейся части пробоотборной камеры 2), отраженная интенсивность будет падать соответственно. Это падение интенсивности является, таким образом, прямой мерой для величины связанных целевых частиц 1.
Описанная процедура является независимой от применяемых магнитных полей. Это обеспечивает возможность оптического наблюдения в реальном времени этапов подготовки, измерения и промывания. Наблюдаемые сигналы могут также использоваться, чтобы управлять измерением или индивидуальными этапами обработки.
Преимущества описанных вариантов оптического считывания, скомбинированных с магнитными метками для активизации, являются следующими.
Дешевый картридж: Носитель 111 может состоять из относительно простой, полученной литьем части полимерного материала.
Большие возможности мультиплексирования при тестировании множества аналитов: Контактная поверхность 112 в имеющемся в распоряжении картридже может оптически сканироваться по большой области. Альтернативно, является возможным формирование изображений большой области, обеспечивая возможность большой детектирующей матрицы. Такая матрица (расположенная на оптической прозрачной поверхности) может выполняться посредством, например, струйной печати разных связывающих молекул на оптической поверхности. Способ также обеспечивает возможность тестирования с высокой пропускной способностью в луночных планшетах посредством использования множественных лучей и множественных детекторов и множественных магнитов активизации (либо механически перемещаемых или активизируемых электромагнитным образом).
Активизация и опознавание являются независимыми: Магнитная активизация целевых частиц (посредством больших магнитных полей и градиентов магнитного поля) не влияет на процесс опознавания. Оптический способ поэтому обеспечивает возможность непрерывного наблюдения сигнала в течение активизации. Это обеспечивает много возможностей понимания в процессе анализа и это обеспечивает возможность способов легкого кинетического обнаружения на основе наклонов сигналов.
Легкая граница раздела: никакое электрическое соединение между картриджем и считывателем не является необходимым. Оптическое окно является единственным требованием, чтобы зондировать картридж. Поэтому может выполняться бесконтактное считывание.
Является возможным считывание с низким уровнем шума.
Устройство 100 датчика, как оно было описано до настоящего времени, использовалось только для определения целевых частиц 1 в "первой зоне" Z1, непосредственно прилегающей к контактной поверхности 112. Чтобы обеспечивать возможность устройству измерять также объемные концентрации, т.е. чтобы обнаруживать целевые частицы 1 во "второй зоне" Z2, которая находится на расстоянии z>0 от контактной поверхности 112, элемент датчика SE модифицируется, так что в носитель 111 дополнительно посылается второй входной световой луч L1'. Этот второй входной световой луч L1' генерируется посредством второго источника 121' света и накладывается на первый входной световой луч L1 с помощью дихроичного зеркала 122 или лучерасщепителя. На фиг. 1 длины волны двух входных световых лучей L1, L1' должны быть разными. Соответствующие выходные световые лучи L2, L2', которые генерируются на контактной поверхности 112 посредством FTIR и затем покидают носитель 111 на идентичных путях, могут поэтому разделяться посредством другого дихроичного зеркала 133 или лучерасщепителя, при этом второй выходной световой луч L2' обнаруживается посредством второго светового детектора 131'. Этот второй световой детектор 131' генерирует соответствующий второй сигнал датчика s' и посылает его в модуль 132 оценки и записи блока оценки EU.
Вместо отдельных детекторов 131 и 131' также является возможным решение с одиночным детектором (при условии, что чувствительность детектора является достаточной для всех используемых длин волн). Чтобы разделять разные отклики сигнала, может применяться мультиплексирование с разделением времени (TDM), мультиплексирование с разделением частот (FDM) или их комбинация. Синхронное детектирование обеспечивает адекватное отделение сигналов в случае FDM. Более того, для генерации второй длины волны с частотным удваиванием (например, с использованием нелинейного кристалла) может использоваться одиночный источник света.
Описанное расширение устройства 100 датчика основывается на том факте, что полевая амплитуда FA быстро затухающих волн, которые генерируются в течение TIR входных световых лучей L1, L1', является функцией расстояния z от контактной поверхности 112 согласно формуле
 (1),
(1),
где λ является длиной волны соответствующего входного светового луча, θ - его угол падения и nA и nB - преломляющие индексы соответствующих ассоциированных сред. Поэтому могут зондироваться разные глубины среды пробы, прилегающей к контактной поверхности 112, если первый и второй входные световые лучи имеют, по меньшей мере, два разных параметра из набора {nA/nB, θ, λ}. Так как отношение преломляющих индексов изменить практически невозможно, входные световые лучи должны предпочтительно иметь, по меньшей мере, разную комбинацию длины волны и угла падения, т.е. либо разную длину волны (как на фиг. 1), разный угол или оба (как на фиг. 2). Согласно формуле (1) это дает в результате различие в расстоянии быстро затухающего затухания и, таким образом, разный отклик по глубине.
Предпочтительно входные световые лучи L1, L1' отражаются от одной и той же чувствительной области. Из соответствующих сигналов s и s' могут определяться как поверхностная концентрация целевых частиц в первой зоне Z1, так и их концентрация во второй зоне Z2 выше контактной поверхности 112. Когда используется более чем два разных параметра, может извлекаться более детальная информация о распределении по глубине.
Фиг. 2 показывает альтернативный вариант осуществления устройства 200 датчика, в котором множественные углы θ падения используются в комбинации с модифицированным носителем 211, который обеспечивает множественные грани в качестве перпендикулярных окон входа и выхода для входных световых лучей L1, L1' и выходных световых лучей L2, L2'. При этом является возможным ограниченное угловое сканирование, в частности, если используется полусферическое окно входа и выхода носителя.
Вместо отдельных детекторов 231, 231' для каждого выходного светового луча L2 и L2', также может использоваться пикселированный детектор, например датчик CCD или CMOS.
Более того, одиночный источник света широкого спектра (например, белый LED) может использоваться вместо приемлемо монохроматических, независимых источников света. При этом, посредством измерения спектра отраженного выходного светового луча, может извлекаться распределение целевых частиц (предпочтительно в комбинации с компенсацией в форме измерения передачи биологической матрицы). Для обнаружения может использоваться цветной CCD. Более продвинутое решение могло бы использовать монохроматор или аналогичную конструкцию, например, с использованием решетки или призмы, чтобы демультиплексировать выходной свет. В этом случае простой монохроматический (линейный) CCD может использоваться для пространственного детектирования спектра. Детектирование 2D изображения для каждого параметра детектора и луча обеспечивает информацию для конструирования 2D (x, y) карты распределения по высоте целевых частиц.
Фиг. 3 изображает нормализованную полевую амплитуду FA быстро затухающей волны, простирающейся из среды A в среду B (проба) для двух разных длин волны и трех разных углов падения. Согласно формуле (1), полевая амплитуда FA затухает экспоненциально с расстоянием z. Для больших длин волн λ и меньших углов θ (т.е. ближе к критическому углу) затухание является более медленным (что также верно для меньших отношений nA/nB). Для характеризации расстояния затухания обычно используют расстояние ze, на котором осуществляется затухание полевой амплитуды до 1/e, умноженного на амплитуду на границе раздела (z=0). Этот 1/e уровень изображается посредством горизонтальной пунктирной линии на фиг. 3. Соответствующее расстояние ze показано на фиг. 4 как функция угла θ падения. Очевидно, что углы θ, близкие к критическому углу (но превышающие его), дают наибольшее расстояние затухания. Следует отметить, однако, что чем ближе угол падения к критическому углу, тем более высокая чувствительность к нежелательной контаминации и фоновым частицам в жидкости пробы.
Обычный размер магнитных бусин, используемых в качестве меток в целевых частицах, - это 300 нм. Чтобы обнаруживать эти бусины, может использоваться 650 нм лазер при угле θ падения 65°, что соответствует расстоянию затухания ze 228 нм для упомянутых преломляющих индексов (фиг. 4). Это прекрасно подходит для обнаружения целевых частиц на контактной поверхности в первой зоне Z1, без какого-либо значительного влияния бусин, расположенных дальше от поверхности. Однако для одновременного обнаружения бусин, расположенных дальше от контактной поверхности, т.е. во второй зоне Z2, необходим значительно больший диапазон быстро затухающих волн. Это может достигаться посредством использования второго источника света с намного более длинной длиной волны, например, 1550 нм. Пример быстро затухающей полевой амплитуды FA по отношению к расстоянию z от контактной поверхности для этого случая показан на фиг. 5. Ясно, что диапазон может быть расширен до примерно 1 микрометра, особенно, когда учитывается дисперсия (ср. сплошная линия для λ=1550 нм, с nA,1550нм=1,50). Следует отметить, что при этом все еще отсутствует (или, по меньшей мере, является очень маленьким) фоновый сигнал, имеющий своим источником биологическую матрицу, вследствие его более низкого преломляющего индекса по сравнению с материалом носителя и бусинами.
Отклик сигнала, т.е. уменьшение в отраженной интенсивности выходных световых лучей вследствие поглощения и/или рассеивания/выхода (outcoupling) от целевых частиц, напрямую относится к локальной полевой амплитуде быстро затухающих волн (интегрированных по распределению целевых частиц). Поэтому, посредством измерения отклика сигнала для каждого параметра луча, является возможным извлекать информацию о распределении целевых частиц. Это может, например, достигаться посредством подгонки распределения целевых частиц к соответствующим откликам сигнала.
Следующий пример иллюстрирует дополнительно это: 650 нм кривая на фиг. 5 существенно взаимодействует только с первыми 1 по 1,5 монослоями магнитных бусин. Соответствующий сигнал будет, поэтому, чувствительным только в отношении бусин в первой зоне Z1 на контактной поверхности. Для случая 1550 нм ситуация является совершенно противоположной: бусины на контактной поверхности будут давать почти равный отклик по сравнению с 650 нм (хотя ожидается до некоторой степени более большой сигнал вследствие более большой средней полевой амплитуды от 0 до 300 нм), но отклик для бусин на большем расстоянии значительно возрастает вследствие влияния длинного экспоненциального хвоста. Так как профиль полевой амплитуды известен в обоих случаях, можно без труда определить распределение бусин, соответствующее измеренным откликам сигнала. Ясно, что чем больше (разных) параметров луча и соответствующих изменений сигнала являются доступными, тем более подробно может определяться распределение бусин.
II. Подход с использованием двух сигналов датчика с устройством магнитного датчика
Второй подход для определения концентрации целевых частиц в первой и второй зоне Z1 и Z2, соответственно, основывается на устройстве магнитного датчика, содержащем элемент магниторезистивного датчика, по меньшей мере, два проводящих элемента для генерирования магнитного поля в ответ на ток возбуждения, примененный в, по меньшей мере, двух состояниях возбуждения, при этом отклики датчика, являющиеся результатом упомянутых состояний возбуждения, комбинируются в сигнал, показывающий концентрацию целевых частиц в объеме вышеупомянутого устройства датчика. В дальнейших разработках этого устройства магнитного датчика зона исключения может препятствовать целевым частицам входить в объем выше поверхности датчика. Посредством генерирования, по меньшей мере, двух откликов датчика как результата, по меньшей мере, двух состояний возбуждения чистый отклик может минимизироваться для целевых частиц в заданном z-положении выше датчика. Этим способом отклик может делаться нулевым для бусин на поверхности датчика или выше.
Фиг. 6 иллюстрирует первый вариант осуществления устройства 300 магнитного датчика, которое реализует вышеописанные принципы. Весь биодатчик может обычно состоять из матрицы (например, 100) блоков датчика типа, показанного на фигуре. Устройство 300 датчика содержит четыре проводящих провода W1, W2, W3, W4, встроенные в подложку 311 в общей плоскости ниже контактной поверхности 312, обращенной к пробоотборной камере 2. Как указывалось выше, контактная поверхность 312 покрывается сайтами 3 связывания для целевых частиц 1, которые содержат магнитные бусины в качестве меток; для простоты, целевые частицы 1 в последующем будут просто идентифицироваться с магнитными бусинами. В середине проводящих проводов W1-W4 размещается элемент датчика SE гигантского магнитного сопротивления (GMR). Как элемент SE GMR, так и провода W1-W4 соединяются с блоком оценки EU, который обеспечивает их соответствующими (возбуждения и датчика) токами и отбирает сигналы измерения s, s' (т.е. падение напряжения на элементе SE GMR).
Фиг. 6 a) показывает первое рабочее состояние устройства 300 датчика, в котором параллельные токи возбуждения текут во внешних проводах W1 и W4. Это генерирует первое магнитное поле возбуждения B, которое намагничивает магнитные бусины целевых частиц 1 (для простоты нарисованы только магнитные поля одного провода). Поле утечки или реакции Br от этих магнитных бусин вводит компонент намагниченности в плоскости в элементе SE GMR, что дает в результате измеримое изменение сопротивления. Если не указано иное, в показанных магнитных датчиках все ширины bw проводов, ширины bs элемента GMR, расстояния aw между проводами и расстояние as между проводами и элементом GMR являются равными, с обычным значением, которое составляет около 3 мкм. Помимо этого, общая нижняя часть проводов и элемента GMR расположена на расстоянии около c=1 мкм ниже контактной поверхности 312.
Фиг. 7 a) показывает для первого рабочего состояния нормализованный отклик u элемента GMR на объемную концентрацию бусин как функцию вертикального положения z (со следующими параметрами: равномерная объемная плотность 1 бусина/мкм3; 200 нм бусины Ademtech; GMR длина 100 мкм; GMR чувствительность 0,003 Ом·м/A; ток возбуждения 25 мА в W1, W4; ток датчика 5 мА в GMR; токи выбираются так, что полное термическое рассеяние - это 25 мВт).
Фиг. 6 b) показывает второе рабочее состояние устройства 300 датчика, в котором токи возбуждения текут во внутренних проводах W2 и W3 при таких же остаточных параметрах, как в первом состоянии. Фиг. 7 b) показывает результирующий нормализованный отклик датчика u' на диаграмме, как диаграмма из фиг. 7 a).
Новый сигнал ucb может при этом вычисляться посредством взвешенного вычитания двух откликов датчика u и u' согласно формуле (14-1) по фиг. 14. Этот сигнал изображается на фиг. 7 c) и показывает чувствительный объем между 2-9 мкм выше контактной поверхности.
Напряжение GMR как отклик на полную величину бусин сводится к значению U формулы (14-2). Минимальный уровень теплового шума eth,GMR для RGMR=500 Ом GMR в 1-сек интервале измерения в расчете на состояние задается в формуле (14-3). Как результат, минимальный уровень шума eth после взвешенного вычитания является таким, как в формуле (14-4). Это дает объемную плотность d (бусины в расчете на объем) для достижения 6 дБ отношения сигнала к шуму SNR (коэффициент 2) в 2-сек интервале измерения в качестве значения формулы (14-5).
По дидактическим причинам было описано вычитание нормализованных напряжений, что, очевидно, не соответствует реальному варианту реализации, где напряжения GMR в двух состояниях вычитаются с взвешиванием.
Следует дополнительно отметить, что к той же цели могут вести и другие схемы возбуждения, содержащие, например, антипараллельные токи, другие геометрии и другие количества проводов (на разном z-положении). Некоторые из этих модификаций будут рассматриваться более подробно ниже. Дополнительно такой же способ может использоваться для подавления объемного отклика.
Существенное преимущество описанного подхода состоит в том, что он измеряет поверхностную плотность (первая область Z1) и объемную плотность (вторая область Z2) в одном и том же физическом местоположении, где поток жидкости является хорошо управляемым и достаточно высоким. Помимо этого, не является необходимым поверхностное формирование шаблона, что устраняет источник дополнительных затрат и препятствование микрожидкостному потоку.
Вес вычитания α в уравнении (14-1) может находиться на основе следующих рассмотрений: помимо отклика на магнитные бусины элемент SE GMR также содержит компонент сигнала магнитного взаимного влияния (MXT) вследствие магнитных полей в плоскости, сгенерированных проводами W1-W4 возбуждения. Как результат, сигналы GMR U1, U2 в двух состояниях измерения являются такими, как выражено уравнением (14-6), при этом d является плотностью бусин, и при этом коэффициенты α и β оба являются зависимыми от геометрии и могут изменяться вследствие изменений процесса производства. Если требуется, эти коэффициенты могут получаться в следующей двухэтапной процедуре калибровки либо для всего пакета датчиков, или для индивидуальных датчиков до использования:
1. Без бусин (d=0) измеряются сигналы U1, U2 датчика в обоих состояниях.
2. После нанесения равномерной поверхностной плотности бусин посредством, например, осаждения наблюдаемые сигналы V1, V2 датчика в обоих двух состояниях задаются посредством (14-7), из которого следует коэффициент α, как в уравнении (14-8).
Фиг. 8 показывает в качестве варианта устройство 400 датчика, которое содержит только два провода W1 и W2 возбуждения на одной и той же стороне элемента SE GMR, которые последовательно возбуждаются с помощью противоположно направленных токов в состоянии 1 и состоянии 2, соответственно. Оценка результирующих сигналов датчика может делаться, как описано выше.
В варианте осуществления устройства 500 магнитного датчика, показанного на фиг. 9, используются два металлических слоя с четырьмя проводами W1-W4. В первом состоянии из фиг. 9 a) возбуждаются более низкие провода W2 и W3, в то время как во втором состоянии из фиг. 9 b) возбуждаются верхние провода W1 и W4. Обычные значения для высоты проводов - это hw=0,35 мкм и для их расстояния друг от друга и/или контактной поверхности d1=0,5 мкм.
Фиг. 10 a) и b) показывают (аналогично фиг. 7 и с теми же параметрами) соответствующие нормализованные напряжения GMR u и u'. Взвешенное вычитание этих значений (ср. уравнение (14-1)) с коэффициентом α=1,05 дает комбинированный отклик ucb из фиг. 10 c), который показывает чувствительный объем от 1,7 до 5 мкм выше датчика.
Такие же вычисления, как в уравнении с (14-2) по (14-5), дают для этого случая значения, данные в (14-9).
Посредством увеличения пространства как между проводами W2/W3, так и элементом SE GMR от 3 мкм (фиг. 9, 10) до 4 мкм, чувствительный объем может дополнительно уменьшаться. Фиг. 11 показывает на диаграмме, аналогичной диаграмме по фиг. 10 c), как комбинированный чистый объемный отклик ucb для однородной объемной плотности делается нулевым, так как чувствительная высота ограничена от 1,7 до 2 мкм. Очевидно, что возможны различные варианты реализации описанных выше конструкций.
Фиг. 12 показывает дополнительный вариант устройства 600 магнитного датчика, которое содержит два провода W1 и W2 возбуждения на обеих сторонах элемента SE GMR и зону 613 исключения в половину датчика. В первом состоянии из фиг. 12 a) токи возбуждения через провода W1, W2 текут в одном и том же направлении, в то время как они являются антипараллельными во втором состоянии из фиг. 12 b). Фиг. 13 a) и b) показывают соответствующие нормализованные напряжения GMR u и u', соответственно (такие же параметры, как на фиг. 7).
Посредством последовательного переключения между этими двумя состояниями и посредством взвешенного вычитания напряжений GMR u, u' согласно уравнению (14-1) с коэффициентом α=2,19, получают комбинированный сигнал ucb из фиг. 13 c), который показывает чувствительный объем между 2-4 мкм выше датчика. Значение α зависит в этом случае от геометрии и положения зоны 613 исключения. Оно может калиброваться до фактического биоизмерения.
Такие же вычисления, как в уравнении с (14-2) по (14-5), дают для этого случая значения, получаемые из (14-10).
III. Подход временного анализа
Другой подход к получению информации о концентрациях целевых частиц в первой зоне Z1, прилегающей к контактной поверхности, и второй зоне Z2 дальше внутри объемной пробы основывается на оценке временного курса сигнала датчика, в частности на измерении стохастических свойств шума в сигнале датчика. Это может реализовываться посредством, например, измерения шумовой амплитуды (мощности) и частотного содержимого демодулированного шума на выходе датчика минус уровень теплового шума.
В последующем описании отклик датчика на свободные целевые частицы (например, магнитные метки), которые не привязаны к контактной поверхности, рассматривается как шум, тогда как отклик на связанные целевые частицы рассматривается как полезный сигнал. Вследствие факта, что целевые частицы перемещаются посредством термического движения в объем чувствительности элемента датчика и вне его, возникают флуктуации, которые определяют стохастическую природу шумовому процессу. Предложенный подход основывается на понимании, что термическое или броуновское движение целевой частицы зависит от ее размера (диаметра), вязкости жидкости и температуры жидкости, и что это является стационарным стохастическим процессом, имеющим характеристическую (среднюю) скорость.
Хотя теперь будут описываться свойства шума, возникающего вследствие броуновского движения магнитных целевых частиц, который измеряется посредством устройства магнитного датчика, аналогичного описанным выше, описанные способы не ограничены этим, но являются также применимыми к, например, оптическим датчикам.
Фиг. 15 иллюстрирует первый вариант реализации подхода временного анализа, в котором оценка плотности меток свободных целевых частиц в объеме чувствительности датчика может получаться из разницы между сигналом датчика s в конце анализа и сигналом датчика s' после промывания. Вследствие термического движения целевые частицы или бусины мигрируют внутрь и вовне объема чувствительности, вызывая шум в сигнале датчика u. В среднем, однако, частицы не перемещаются; поэтому среднее количество <Ns> свободных целевых частиц в объеме чувствительности выше датчика является просто долей полного количества Ntot свободных целевых частиц в пробоотборной камере. Если предполагается равномерное распределение частиц, это среднее количество задается согласно уравнению (18-1) из фиг. 18, где Vs и Vtot являются объемами области чувствительности и полным объемом, соответственно.
Все частицы перемещаются независимо и без памяти предыдущих положений или траекторий. Вероятность нахождения Ns частиц в объеме чувствительности может характеризоваться как пространственный пуассоновский процесс. Поэтому средний отклик датчика на перемещающиеся целевые частицы внутри объема выше датчика является пропорциональным плотности этих свободных целевых частиц внутри этого объема. Следует отметить, что это линейное отношение также имеет место, если функция отклика датчика не является равномерной в объеме чувствительности; в этом случае вывод датчика просто равняется среднему количеству целевых частиц в объеме чувствительности, масштабированном средним откликом датчика.
Посредством вычитания сигнала датчика s' после промывания (т.е. удаления несвязанных целевых частиц с поверхности датчика), который относится исключительно к связанным на поверхности целевым частицам, из сигнала датчика s, полученного в конце биологического анализа, который относится как к сигналу (связанным на поверхности целевым частицам), так и шумовому среднему, может получаться оценка плотности целевых частиц в объеме чувствительности датчика. На фиг. 15 иллюстрируется приложение этой процедуры к измерению конечной точки, однако является очевидным, что способ может также применяться к кинетическому анализу.
Следует отметить, что также может реализовываться половинная зона исключения (ср. фиг. 12), так что может измеряться исключительно сигнал от перемещающихся частиц без измерения связанных целевых частиц. Этот способ обеспечивает возможность определения шумового среднего в одиночном этапе.
Если свободные целевые частицы внутри объема датчика являются равномерно распределенными, то полная плотность частиц получается посредством масштабирования плотности меток свободных частиц в объеме чувствительности датчика согласно объемным отношениям, как описано выше. Однако при использовании на практике равномерность может искажаться вследствие магнитной активизации, что эффективно увеличивает плотность бусин, близких к поверхности датчика.
В другом варианте реализации подхода временного анализа оценка плотности целевых частиц в объеме чувствительности датчика может получаться из мощности шума в отклике датчика в течение биологического анализа.
Все частицы перемещаются независимо и без памяти предыдущих положений или траекторий. Предполагая, что целевая частица способна входить в и покидать объем чувствительности в двух последовательных случаях наблюдения, вероятность нахождения Ns частиц в объеме чувствительности характеризуется как пространственный пуассоновский процесс. Дисперсия количества бусин в объеме чувствительности тогда равняется σ2 N=Ns, и поэтому мощность шума также является пропорциональной Ns.
Следует отметить, что это линейное отношение также имеет место, если отклик датчика не является равномерным внутри объема выше датчика, так как мощность шума просто масштабируется в соответствии с дисперсией отклика датчика.
Кинетика связывания частиц с контактной поверхностью биодатчика является чрезвычайно медленной по сравнению с флуктуацией количества частиц внутри зоны чувствительности. Как следствие, сигнал от связанных частиц легко отделяется от шума посредством фильтрации в частотной области. При использовании фильтра высоких частот остается только шум, и может измеряться мощность шума.
Посредством вычитания мощности теплового шума, которая измеряется до биологического анализа, из мощности шума в отклике датчика в течение анализа может получаться оценка плотности целевых частиц.
В дополнительном варианте реализации подхода временного анализа информация о величине кластеризованных целевых частиц (бусин) может получаться посредством сравнения среднего количества целевых частиц в объеме чувствительности датчика с дисперсией количества целевых частиц.
Для пространственного пуассоновского процесса среднее и дисперсия являются равными. Если имеются как одиночные бусины, так и кластеры бусин, присутствующие в зоне чувствительности датчика, то возникает отличие от истинного пространственного пуассоновского процесса. Перемещение кластеров внутрь и вовне чувствительной зоны дает в результате разброс распределения вероятностей, так как хвостовые значения распределения увеличиваются, в то время как среднее понижается. Следовательно, шумовая дисперсия эффективно увеличивается вследствие присутствия кластеров, что иллюстрируется на фиг. 16.
Информация о величине кластеров может получаться посредством определения отношения шумового среднего и дисперсии, ср. уравнение (18-2).
Присутствие шума в сигнале датчика может также использоваться в качестве основания, чтобы определять, закрыт ли биодатчик каким-либо способом, например, воздушным пузырьком. Очевидно, если воздушный пузырек присутствует в биодатчике, целевые частицы из текучей среды пробы могут не достигать поверхности, и должная работа датчика является невозможной. Отсутствие объемного шума показывает, что никакие целевые частицы не присутствуют вблизи поверхности датчика.
В дополнение, количественное определение плотности свободных целевых частиц также обеспечивает возможность обнаружения, присутствует ли достаточное количество меток. Например, когда бусины хранятся в биодатчике, они могут не рассеиваться должным образом в объеме пробы. Свойства шума могут использоваться, чтобы определять, присутствует ли достаточное количество меток и, следовательно, работает ли датчик должным образом.
Ниже будет показано, что коэффициент диффузии целевых частиц (например, суперпарамагнитных меток) может оцениваться из функции спектральной плотности мощности шума. В ситуации равновесия скорости эмиграции и иммиграции для бусин, входящих в и покидающих зону чувствительности датчика, являются равными. Процесс миграции может характеризоваться функцией автокорреляции флуктуации количества бусин в объеме чувствительности. Функция автокорреляции может выражаться как в уравнении (18-3), где дисперсия количества свободных бусин в объеме чувствительности равняется σ2 N=Ns, и τ является константой времени системы. Константа времени τ соответствует времени диффузии объема чувствительности. В общем случае броуновское движение характеризуется среднеквадратическим смещением в некоторое время наблюдения ∆t. Среднеквадратическое смещение в трех измерениях задается в уравнении (18-4), где D - это коэффициент диффузии. Затем для кубического объема чувствительности с длиной края r константа времени диффузии задается в уравнении (18-5).
Вышеописанные варианты не ограничиваются кубическим объемом чувствительности. Для объемов различной формы могут получаться разные константы времени диффузии. Например, в общем случае объем чувствительности магнитного биодатчика не является кубическим, но скорее представляет собой плоский блок с относительно маленькой высотой h по сравнению с поверхностью чувствительности. Следовательно, миграция меток бусин первоначально происходит ортогонально к поверхности датчика, и, таким образом, константа времени в этом направлении является доминирующей. Константа времени, ассоциированная с этой одномерной моделью, может быть описана посредством уравнения (18-6).
Функция спектральной плотности мощности шума (psdf) равняется преобразованию Фурье функции автокорреляции, которая имеет форму Лоренца из фиг. 17 и уравнения (18-7). Следовательно, константа времени может определяться посредством подгонки psdf модели к измеренному спектру мощности и оптимизации для неизвестного параметра τ. Например, точка -3 дБ, т.е. частота, где нормализованная плотность мощности упала до 0,5 (ср. фиг. 17), может использоваться как основа для измерения константы времени. Следует отметить, что также psdf шума в сигнале датчика имеет форму Лоренца. Если отклик датчика не является равномерным в объеме чувствительности, psdf шума просто масштабируется откликом датчика.
В то время как изобретение описывалось выше со ссылкой на конкретные варианты осуществления, являются возможными различные модификации и расширения, например:
Элемент датчика может быть любым подходящим датчиком, чтобы обнаруживать присутствие целевых частиц на или рядом с поверхностью датчика, на основе любого свойства частиц, например, он может осуществлять обнаружение посредством магнитных способов, оптических способов (например, формирования изображений, флуоресценции, хемолюминесценции, поглощения, рассеивания, поверхностного плазмонного резонанса, рассеяния Рамана и т.д.), звукового обнаружения (например, поверхностной акустической волны, объемной акустической волны, консоли, кварцевого кристалла и т.д.), электрического обнаружения (например, проводимости, импеданса, амперометрического, окислительно-восстановительного цикла) и т.д.
Магнитный датчик может быть любым подходящим датчиком на основе обнаружения магнитных свойств частицы на поверхности датчика или рядом с ней, например катушечный, магниторезистивный датчик, магнито-ограничительный датчик, датчик Холла, плоский датчик Холла, чувствительный прибор для обнаружения неоднородностей магнитного поля, SQUID, датчик магнитного резонанса и т.д.
В дополнение к молекулярному анализу, с помощью устройств датчика согласно этому изобретению также могут обнаруживаться большие количества вещества, например клетки, вирусы или фракции клеток или вирусов, экстракт ткани и т.д.
Обнаружение может происходить с или без сканирования элемента датчика по отношению к поверхности датчика.
Данные измерения могут выводиться как измерение конечной точки, а также посредством записи сигналов кинетически или прерывисто.
Частицы, служащие в качестве меток, могут обнаруживаться напрямую посредством способа опознавания. Также частицы могут дополнительно обрабатываться до обнаружения. Пример дополнительной обработки состоит в том, что добавляются материалы или что модифицируются (био)химические или физические свойства метки, чтобы способствовать обнаружению.
Устройство и способ могут использоваться с несколькими биохимическими типами анализа, например анализа связывания/высвобождения, анализа пробы, конкурентного анализа, анализа смещения, энзимного анализа и т.д. Это является особенно подходящим для обнаружения ДНК, так как является легко реализуемым крупномасштабное мультиплексирование, и разные олигонуклеотиды могут наноситься посредством струйной печати на оптической подложке.
Устройство и способ являются подходящими для мультиплексирования датчика (т.е. параллельного использования разных датчиков и поверхностей датчика), мультиплексирования меток (т.е. параллельного использования разных типов меток) и мультиплексирования камеры (т.е. параллельного использования разных реакционных камер).
Устройство и способ могут использоваться как быстрые, надежные и легкие для использования биодатчики представляющего интерес параметра для маленьких объемов пробы. Реакционная камера может быть имеющимся в распоряжении элементом, подлежащим использованию с компактным считывателем, содержащим одно или более средств генерирования поля и одно или более средств обнаружения. Также устройство, способы и системы по настоящему изобретению могут использоваться в автоматизированном тестировании с высокой пропускной способностью. В этом случае реакционная камера является, например, луночным планшетом или кюветкой, подходящей для применения в автоматизированном инструменте.
В заключение следует отметить, что в настоящей заявке термин "содержащий" не исключает другие элементы или этапы, что форма единственного числа не исключает множественности, и что одиночный процессор или другой блок может исполнять функции нескольких средств. Это изобретение основано на каждом без исключения новом отличительном признаке и каждой без исключения комбинации отличительных признаков. Более того, ссылочные позиции в пунктах формулы изобретения не должны толковаться как ограничивающие их объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОЭЛЕКТРОННОЕ СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЧАСТИЦ-МЕТОК | 2007 |
|
RU2487338C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА МАГНИТНО МЕЧЕННЫХ ЦЕЛЕВЫХ КОМПОНЕНТОВ | 2009 |
|
RU2530715C2 |
| НОСИТЕЛЬ ДЛЯ ОПТИЧЕСКОГО ДЕТЕКТИРОВАНИЯ В МАЛЫХ ОБЪЕМАХ ОБРАЗЦА | 2009 |
|
RU2502985C2 |
| КАРТРИДЖ ДЛЯ АНАЛИЗОВ С ПОМОЩЬЮ МАГНИТНЫХ ЧАСТИЦ | 2009 |
|
RU2505816C2 |
| СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЦЕЛЕВОГО ВЕЩЕСТВА | 2010 |
|
RU2519505C2 |
| СИСТЕМА БИОДАТЧИКА НА ОСНОВЕ НАРУШЕННОГО ПОЛНОГО ВНУТРЕННЕГО ОТРАЖЕНИЯ (НПВО) И СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА ДАТЧИКА, ОСНОВАННОГО НА НПВО | 2008 |
|
RU2492450C2 |
| МИКРОЭЛЕКТРОННОЕ СЕНСОРНОЕ УСТРОЙСТВО СЕНСОРА ДЛЯ ДЕТЕКТИРОВАНИЯ ЦЕЛЕВЫХ ЧАСТИЦ | 2008 |
|
RU2489704C2 |
| СИСТЕМЫ И СПОСОБЫ ПРИМЕНЕНИЯ МАГНИТОЧУВСТВИТЕЛЬНЫХ ДАТЧИКОВ ДЛЯ ОПРЕДЕЛЕНИЯ ГЕНЕТИЧЕСКОЙ ХАРАКТЕРИСТИКИ | 2016 |
|
RU2709986C2 |
| СПОСОБ КОНТРОЛЯ СОДЕРЖАНИЯ МЕХАНИЧЕСКИХ ПРИМЕСЕЙ В АЭРОЗОЛЯХ И ЖИДКОСТЯХ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЯЧЕЙКИ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2801784C1 |
| ИЗМЕРЕНИЕ ПАРАМЕТРОВ АГГЛЮТИНАЦИИ | 2007 |
|
RU2460058C2 |




Это изобретение относится к устройству (100) датчика и способу для определения величины целевых частиц (1) на контактной поверхности (112), прилегающей к пробоотборной камере (2). Целевые частицы (1) в пробоотборной камере обнаруживаются посредством элемента датчика (SE), и обеспечивается, по меньшей мере, один соответствующий сигнал датчика (s, s'). Блок оценки (EU) затем определяет величину целевых частиц (1) в первой зоне (Z1) непосредственно на контактной поверхности (112) и второй зоне (Z2) на расстоянии (z) от контактной поверхности на основе этого сигнала датчика. В подходе с использованием оптического измерения нарушенное полное внутреннее отражение, происходящее при разных рабочих условиях (например, длине волны, угле падения), может использоваться, чтобы извлекать информацию о первой и второй зонах (Z1, Z2). В подходе магнитного измерения разные магнитные поля возбуждения могут использоваться, чтобы возбуждать магнитные целевые частицы различным образом в первой и второй зоне (Z2). Более того, может оцениваться временной курс сигналов датчика (s, s'), в частности, по отношению к стохастическим перемещениям целевых частиц (1). Техническим результатом изобретения является повышение точности и надежности определения величины целевых частиц. 3 н. и 11 з.п. ф-лы, 28 ил.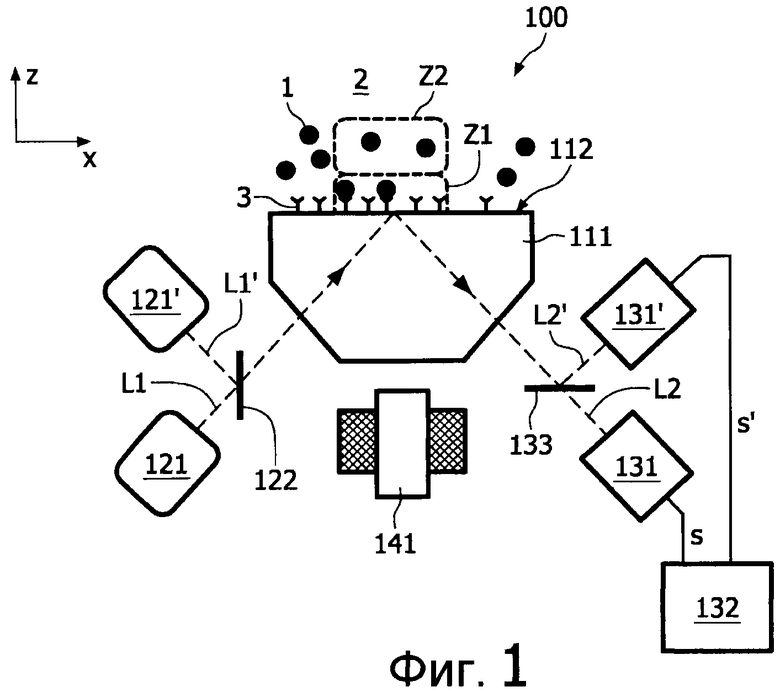
1. Устройство (100-600) датчика для определения величины целевых частиц (1) на контактной поверхности (112-612) пробоотборной камеры (2), в которой может обеспечиваться проба с упомянутыми целевыми частицами (1), содержащее
a) элемент датчика (SE) для обнаружения целевых частиц (1) в пробоотборной камере (2) и для обеспечения, по меньшей мере, одного соответствующего сигнала датчика (s, s');
b) блок оценки (EU) прямого или косвенного определения величины целевых частиц (1) в первой зоне (Z1) непосредственно на контактной поверхности (112-612) и второй зоне (Z2) на расстоянии (z) от контактной поверхности (112-612) на основе упомянутого, по меньшей мере, одного сигнала датчика, при этом блок оценки (EU) обеспечивает выходное значение, которое представляет величину целевых частиц (1) в первой зоне (Z1), при этом выходное значение определяется посредством принятия в рассмотрение величины целевых частиц (1) во второй зоне (Z2).
2. Устройство (100-600) датчика по п.1, отличающееся тем, что элемент датчика (SE) обеспечивает, по меньшей мере, два сигнала датчика (s, s'), которые проявляют различную чувствительность к величине целевых частиц (1) в первой зоне (Z1) и второй зоне (Z2) соответственно, и тем, что блок оценки (EU) определяет взвешенную разницу сигналов датчика (s, s').
3. Устройство (600) датчика по п.1, отличающееся тем, что пробоотборная камера (2) содержит зону (613) исключения, прилегающую к части контактной поверхности (612), в которую не могут входить целевые частицы (1).
4. Устройство (100-200) датчика по п.1, отличающееся тем, что элемент датчика (SE) содержит
a) по меньшей мере, один источник (121, 121', 221, 221') света для излучения двух входных световых лучей (L1, L1'), так что они полностью внутренне отражаются на контактной поверхности (112-212) как соответствующие выходные световые лучи (L2, L2') при разных условиях, в силу чего генерируются быстро затухающие волны в течение полного внутреннего отражения входных световых лучей (L1, L1') на контактной поверхности (112-212), которые имеют разные расстояния затухания (zе), в силу чего входные световые лучи (L1, L1') имеют разный спектральный состав и/или углы падения (и) на контактную поверхность (212);
b) по меньшей мере, один световой детектор (131, 131', 231, 231') для определения величины света выходных световых лучей и для обеспечения соответствующих сигналов датчика (s, s').
5. Устройство (300-600) датчика по п.1, отличающееся тем, что оно содержит
a) по меньшей мере, один генератор (W1-W4) магнитного поля для генерирования, по меньшей мере, двух магнитных полей возбуждения (В, В') разной конфигурации в пробоотборной камере (2), в силу чего генератор магнитного поля содержит, по меньшей мере, два проводящих провода (W1-W4), которые могут избирательно снабжаться с токами возбуждения и которые имеют разное геометрическое расположение по отношению к элементу магнитного датчика (SE);
b) элемент магнитного датчика (SE) для обнаружения магнитных реакционных полей (Вr), сгенерированных магнитными целевыми частицами (1) в виде реакции на магнитные поля возбуждения, и для обеспечения соответствующих сигналов датчика (s, s').
6. Устройство (300, 500, 600) датчика по п.1, отличающееся тем, что оно содержит пары проводящих проводов (W1-W4), которые расположены симметрично по отношению к элементу магнитного датчика (SE), и тем, что контактная поверхность (112-612) содержит сайты (3) связывания, с которыми могут связываться целевые частицы (1).
7. Устройство (100-600) датчика по п.1, отличающееся тем, что оно содержит устройство манипулирования, в частности генератор (141) магнитного поля, для активного перемещения целевых частиц (1), при этом устройство (141) манипулирования выполнено с возможностью удаления свободных целевых частиц (1) из чувствительной области элемента датчика (SE).
8. Устройство (100-600) датчика по п.1, отличающееся тем, что блок оценки (EU) выполнен с возможностью оценки временного курса сигналов датчика (s, s'), причем оценка осуществляется по отношению к стохастическим перемещениям целевых частиц (1), и/или тем, что блок оценки (EU) выполнен с возможностью определения мощности шума сигналов датчика (s, s'), предпочтительно после фильтрации верхних частот, и/или тем, что блок оценки (EU) выполнен с возможностью определения среднего количества целевых частиц (1) во второй зоне (Z2) и дисперсии этого количества, и/или тем, что блок оценки (EU) выполнен с возможностью определения среднего количества целевых частиц (1) во второй зоне (Z2) и/или дисперсии этого количества, и/или тем, что блок оценки (EU) выполнен с возможностью получения информации о величине кластеризованных целевых частиц (1), о покрытии контактной поверхности и/или о диффузионных характеристиках целевых частиц.
9. Способ для определения величины целевых частиц (1) на контактной поверхности (112-612), прилегающей к пробоотборной камере (2), в которой обеспечивается проба с упомянутыми целевыми частицами, содержащий:
a) обнаружение целевых частиц (1) в пробоотборной камере (2) и обеспечение, по меньшей мере, одного соответствующего сигнала датчика (s, s') с элементом датчика (SE);
b) прямое или косвенное определение с помощью блока оценки (EU) величины целевых частиц (1) в первой зоне (Z1) непосредственно на контактной поверхности и второй зоне (Z2) на расстоянии (z) от контактной поверхности на основе упомянутого, по меньшей мере, одного сигнала датчика, при этом блок оценки (EU) обеспечивает выходное значение, которое представляет величину целевых частиц (1) в первой зоне (Z1), при этом выходное значение определялось посредством принятия в рассмотрение величины целевых частиц (1) во второй зоне (Z2).
10. Способ по п.9, отличающийся тем, что обеспечиваются, по меньшей мере, два сигнала датчика (s, s'), которые проявляют различную чувствительность к величине целевых частиц (1) в первой зоне (Z1) и второй зоне (Z2) соответственно.
11. Способ по п.9, отличающийся тем, что сигналы датчика (s, s') получают из нарушенного полного внутреннего отражения с быстро затухающими волнами с разными расстояниями затухания (ze).
12. Способ по п.9, отличающийся тем, что сигнал датчика (s, s') получают из магнитных реакционных полей (Вr) магнитных целевых частиц (1), которые были возбуждены с магнитными полями возбуждения (В, В') разной конфигурации.
13. Способ по п.9, отличающийся тем, что временной курс сигналов датчика (s, s') оценивается, в частности, по отношению к стохастическим перемещениям целевых частиц (1).
14. Применение устройства (100-600) датчика по любому из пп.1-8 для молекулярной диагностики, биологического анализа проб или химического анализа проб.
| US2005213204 А1, 29.09.2005 | |||
| WO 9103728 A1, 21.03.1991 | |||
| АНАЛИЗ АНАЛИТОВ С ИСПОЛЬЗОВАНИЕМ ЧАСТИЦ В КАЧЕСТВЕ МЕТКИ | 1997 |
|
RU2251572C2 |
| WO 2007060568 A2, 31.05.2007. | |||

