Область техники
Изобретение относится к микроэлектронному сенсорному устройству и способу для детектирования целевых частиц, которые связываются с местами связывания на поверхности связывания носителя. Более того, оно относится к использованию такого устройства.
Предшествующий уровень техники
US 2005/0048599 A1 раскрывает способ для исследования микроорганизмов, которые помечены частицами, из условия, чтобы (например, магнитная) сила могла быть приложена к ним. В одном из вариантов осуществления этого способа пучок света направляется через прозрачный материал на поверхность, где он подвергается полному внутреннему отражению. Свет этого пучка покидает прозрачный материал в качестве затухающей волны, которая рассеивается микроорганизмами и/или другими компонентами на поверхности, а затем детектируется фотодетектором или используется для подсветки микроорганизмов для визуального наблюдения. Проблема этого и подобных подходов к измерению состоит в том, что сигнал, в котором заинтересованы, часто является всего лишь небольшим изменением большого базового сигнала, делая точные и устойчивые к ошибкам измерения затруднительными, например, вследствие ограничений электронного коэффициента усиления, которые могут накладываться на суммарный сигнал.
WO 2007/0136542 A1 раскрывает устройство с двумя параллельными волноводами, по которым распространяются лазерные пучки света, упомянутые пучки складываются на конце волноводов в интерферометре. Один из волноводов покрыт материалом захвата для связывания целевого материала, который может присутствовать в образце, на который экспонированы волноводы. Когда такой целевой материал связан, скорость света в соответственном волноводе изменяется, давая соответствующее изменение в интерференционной картине наложенных пучков света. Более того, связанный целевой материал может двигаться прикладыванием электрического или магнитного поля, и соответствующая модуляция наблюдаемой интерференционной картины может оцениваться синхронным усилителем.
Краткое изложение существа изобретения
На основании этой ситуации задача настоящего изобретения состоит в создании средства для улучшенного детектирования связанных целевых частиц, при этом, требуется, чтобы достигалась более высокая чувствительность и/или точность.
Эта задача достигается микроэлектронным сенсорным устройством по пункту 1 формулы изобретения, способом по пункту 12 формулы изобретения и использованию по пункту 23 формулы изобретения. Предпочтительные варианты осуществления раскрыты в зависимых пунктах формулы изобретения.
Микроэлектронное сенсорное устройство согласно настоящему изобретению служит для качественного или количественного детектирования целевых частиц, которые связываются с местами связывания на «поверхности связывания» носителя, при этом поверхность связывания и носитель (и, конечно, целевые частицы) не обязательно принадлежат к устройству. «Целевые частицы», в частности, могут содержать комбинацию целевых компонентов (например, биологических веществ, подобных биомолекулам, комплексам, клеточным фракциям или клеткам) и «меточных частиц» (например, атомов, молекул, комплексов, наночастиц, микрочастиц и т.д.), которые имеют некоторые параметры (например, оптическую плотность, магнитную восприимчивость, электрический заряд, флуоресценцию или радиоактивность), которые могут детектироваться. Термин «наночастица» используется для частиц, имеющих по меньшей мере один размер, находящийся в диапазоне между 3 нм и 5000 нм, предпочтительно, между 10 нм и 3000 нм, более предпочтительно, между 50 нм и 1000 нм. Носитель обычно является твердым телом, например, из прозрачного материала, подобного стеклу или прозрачному пластику, имеющего одну выделенную область поверхности, которая здесь названа «поверхностью связывания», и которая содержит по меньшей мере один, однако, типично, большое количество мест связывания. Места связывания обычно будут реализовываться молекулами захвата, которые прикреплены к поверхности связывания, и которые могут специфически связываться с целевыми частицами (молекулами) во флюиде образца. Вообще, связывание может быть основано на химическом связывании, электростатическом связывании, силах Вандерваала или тому подобном.
Микроэлектронное сенсорное устройство содержит следующие компоненты:
a) блок сенсора для выдачи «сигнала сенсора», который является указывающим на присутствие целевых частиц в связанной области чувствительности блока сенсора. «Область чувствительности», по определению, является объемом, в котором блок сенсора может детектировать целевые частицы.
b) «блок приведения в движение» для избирательного индуцирования движения связанных целевых частиц на поверхности связывания относительно области чувствительности блока сенсора. В этом контексте «движение по отношению к области чувствительности» будет движением в пределах области чувствительности и/или движением, которое пересекает границу области чувствительности. Вообще, блок приведения в движение может применять любой пригодный эффект для достижения требуемого движения целевых частиц, например механические вибрации или гидродинамическое движение окружающего флюида образца или вибрации целевых частиц, индуцированные прикладываемыми изнутри магнитными и/или электростатическими силами. Движение должно быть таким, что связывание целевых частиц сохраняется и не нарушается. Типично движение будет колебательным.
c) «Модуль оценки» для оценки сигнала сенсора блока сенсора, при этом эта оценка учитывает движение связанных целевых частиц, которое было индуцировано блоком приведения в движение. Для этой цели, индуцированное движение может детектироваться отдельным измерением или, предпочтительно, логически выводиться из управляющего входного сигнала блока приведения в движение. Модуль оценки поэтому типично присоединен как к блоку сенсора, так и к блоку приведения в движение. Он может быть реализован в виде специализированных (аналоговых) электронных схем, аппаратных средств цифровой обработки данных со связанным программным обеспечением, или комбинацией обоих.
Описанное микроэлектронное сенсорное устройство имеет преимущество, чтобы предусматривать более точную и устойчивую к ошибкам оценку сигналов сенсоров, так как измерение блока сенсора соотносится с индуцированным движением детектируемых целевых частиц. Движение, например, всех связанных целевых частиц вне области чувствительности (или всех в область чувствительности) будет давать два сигнала, измерение с и эталонное измерение без целевых частиц, по которым реальное действие целевых частиц может логически выводиться с высокой точностью.
Изобретение, кроме того, относится к способу для исследования целевых частиц, которые связаны с местами связывания на поверхности связывании носителя, при этом способ содержит следующие этапы:
a) Измерение, с помощью блока сенсора, сигнала сенсора, который является указывающим на присутствие целевых частиц в области чувствительности блока сенсора.
b) Избирательное индуцирование, с помощью блока приведения в движение, движения связанных целевых частиц относительно области чувствительности блока сенсора.
c) Оценку, с помощью модуля оценки, сигнала сенсора, с учетом индуцированного движения целевых частиц.
Способ, в общем виде, содержит этапы, которые могут выполняться микроэлектронным сенсорным устройством разновидности, описанной выше. Поэтому приведена ссылка на предшествующее описание для дополнительной информации о деталях, преимуществах и усовершенствованиях такого способа.
В последующем будут описаны различные дополнительные усовершенствования изобретения, которые относятся как к микроэлектронному сенсорному устройству, так и способу, определенным выше.
В первом конкретном варианте осуществления целевые частицы движутся под действием блока приведения в движение через зоны области чувствительности, в которой блок сенсора имеет разную чувствительность. Целевая частица поэтому будет вызывать разные сигналы сенсоров блока сенсора, будучи в зонах разной чувствительности. Предпочтительно, чувствительность блока сенсора непрерывно меняется на всем протяжении области чувствительности; в этом случае даже малейшее движение целевой частицы индуцирует изменение сигнала сенсора блока сенсора. Вообще, неравномерная чувствительность блока сенсора гарантирует, что индуцированное движение целевой частицы будет оказывать воздействие на сигнал сенсора, которое может учитываться во время оценки этого сигнала.
Уже было упомянуто, что движение целевых частиц может быть индуцировано несколькими разными способами. В предпочтительном варианте осуществления целевые частицы движутся посредством взаимодействия с магнитным и/или электрическим полем. Это возможно, если целевые частицы имеют свойство, с которым может связываться магнитное или электрическое поле, например, если частицы имеют магнитный или электрический дипольный момент либо если такой момент может быть индуцирован. В этом варианте осуществления движение целевых частиц может очень хорошо контролироваться формированием магнитного или электрического поля. Что касается формирования поля, блок приведения в движение предпочтительно содержит генератор поля, например постоянный магнит, электромагнит либо электрод или пару электродов.
Индуцированное движение целевых частиц, по выбору, может модулироваться, предпочтительно периодическим образом, с заданной частотой модуляции (при этом частота определяет период некоторого периодического течения, которому не обязательно требуется быть синусоидальным). Для этой цели блок приведения в движение может содержать модулятор для модуляции своей активности управляемым, а предпочтительно, настраиваемым способом. Активная модуляция движения связанных целевых частиц имеет преимущество, что это движение может настраиваться на режим, который оптимален для заданных целей оценки. Более того, информация об управляемой модуляции активности может использоваться модулем оценки, так как она неявным образом содержит требуемую информацию об индуцированном движении целевых частиц. Таким образом, управляющий сигнал, с помощью которого модулятор управляет блоком приведения в движение, параллельно подается в модуль оценки для учета во время оценки сигнала сенсора. Более того, посредством индуцирования и детектирования движения частиц в одной и той же частотной области, например, посредством использования технологий синхронной модуляции и демодуляции, источники шума в других частотных областях могут подавляться крайне эффективно.
Блок сенсора использует оптическое изменение, при котором сигнал сенсора получают из выходного пучка света, который приходит из носителя и который содержит свет от фрустрированного полного внутреннего отражения входного пучка света на поверхности связывания. В этом варианте осуществления микроэлектронное сенсорное устройство будет содержать источник света для испускания входного пучка света на поверхность связывания таким образом - то есть под соответствующим углом - чтобы он там подвергался полному внутреннему отражению. Источник света, например, может быть лазером или светоизлучающим диодом (СИД, LED), по выбору оснащенным какой-нибудь оптикой для профилирования и направления входного пучка света. Более точно, устройство сенсора будет содержать оптический детектор для детектирования упомянутого выходного пучка света, при этом это детектирование типично содержит измерение количества света в выходном пучке света (например, выраженное в качестве интенсивности этого пучка). Оптический детектор может содержать любой пригодный сенсор или множество сенсоров, посредством которых может детектироваться свет заданного спектра, например, фотодиоды, фоторезисторы, фотоэлементы, интегральную схему на ПЗС (приборах с зарядовой связью, CCD) или фотоэлектронные умножители.
Чтобы полное внутреннее отражение происходило на поверхности связывания, эта поверхность должна быть границей раздела между двумя средами, например стеклом и водой, на которой происходит полное внутреннее отражение (TIR), если падающий пучок света попадает на границу раздела под надлежащим углом (большим, чем ассоциативно связанный критический угол TIR). Такая установка часто используется для исследования небольших объемов образца на границе раздела TIR, которая достигается экспоненциально затухающими нераспространяющимися волнами подвергнутого полному внутреннему отражению пучка. Целевые частицы, которые присутствуют в этом объеме, в таком случае, могут рассеивать и/или поглощать некоторое количество света затухающих волн, который, соответственно, больше не будет соединяться в отраженный пучок света. В этом сценарии «фрустрированного полного внутреннего отражения» выходной пучок света устройства сенсора будет содержать отраженный свет входного пучка света,
при этом небольшое количество света, недостающего вследствие рассеяния и/или поглощения затухающих волн, содержит в себе требуемую информацию о целевых компонентах в области исследования. В зависимости от концентрации исследуемых веществ, которые должны измеряться в биологической пробе, сигнал, в котором заинтересованы (недостающий свет), может быть очень небольшим по отношению к относительно большому DC, то есть постоянному фоновому излучению. Более того, вследствие относительно большого фонового излучения, сигнал подвержен возмущениям из любого источника. Предложенное применение индуцированного движения целевых частиц помогает в этой ситуации улучшать точность измерений.
Согласно дополнительному усовершенствованию вышеупомянутого варианта осуществления входной пучок света может модулироваться, при этом модуляция предпочтительно выполняется периодическим образом с заданной частотой входного сигнала. Модуляция входного пучка света снабжает его характеристическим отпечатком пальца, который предоставляет возможность различать в сигнале сенсора эффекты, которые возвращаются в этот входной пучок света из других воздействий, например, вкладов рассеянного света.
В вышеприведенных вариантах осуществления, в которых формируется выходной пучок света, этот пучок, по выбору, может детектироваться камерой (например, ПЗС-камерой), снимающей экспозиции с
(a) частотой (частотой кадров), которая синхронизирована по фазе частотой ω модуляции выходного пучка света, но является меньшей, чем эта частота ω модуляции (при этом эта частота модуляции, например, может соответствовать модулированному движению целевых частиц и/или модуляции входного пучка света);
(b) продолжительностью выдержки (открыванием фотообъектива), меньшей, чем период модуляции (T=2π/ω) выходного пучка света.
Таким образом, можно наблюдать с помощью камеры частоты модуляции в выходном пучке света, которые выше, чем максимальная частота кадров камеры.
Сигнал сенсора, который выдается блоком сенсора, предпочтительно демодулируется модулем оценки, относительно одной или более заданных частот, в частности относительно модуляции индуцированного движения целевых частиц и/или относительно модуляции входного пучка света (если используются такая модуляция и такой входной пучок света). Для выполнения этой демодуляции блок оценки может содержать демодулятор, как хорошо известно специалисту в области техники (аналоговой или цифровой) обработки сигналов. С помощью демодуляции эффекты, которые подлинно возвращаются в целевые частицы и/или входной пучок света, могут отличаться от других эффектов, то есть от возмущений.
В конкретной реализации вышеупомянутого варианта осуществления модуляция индуцированного движения целевых частиц и модуляция входного пучка света настраиваются из условия, чтобы модуляция движения присутствовала в демодулированном сигнале сенсора в качестве боковой полосы относительно световой модуляции. Например, это имеет место, если синусоидальная световая модуляция происходит на более высокой частоте, чем синусоидальная модуляция движения.
В зависимости от конкретной задачи, для которой применяются микроэлектронное сенсорное устройство или способ, сигнал сенсора может оцениваться относительно разных аспектов. Предпочтительно, сигнал сенсора оценивается относительно наличия и/или количества целевых частиц в области чувствительности блока сенсора, таким образом, например, предоставляя возможность определять концентрацию конкретных биомолекул во флюиде образца. В качестве альтернативы или дополнительно, сигнал сенсора может оцениваться относительно характеристик связывания указанного связывания между целевыми частицами и поверхностью связывания. В этом случае используется то, что реакция целевых частиц на определенные силы приведения в движение, например, индуцированные электрическим или магнитным полем, зависит от прочности, с которой целевые частицы связаны, то есть от свойств связанных мест связывания (молекул захвата). Некоторые аспекты индуцированного движения целевых частиц - подобные коэффициенту затухания, резонансной частоте, амплитуде, фазовому сдвигу и т.д., поэтому будут нести ценную информацию о месте связывания и/или рабочих условиях на поверхности связывания (например, вязкости окружающего флюида).
Изобретение, кроме того, относится к применению микроэлектронного устройства, описанного выше, для молекулярной диагностики, анализа биологических образцов или анализа химических образцов, анализа продовольствия и/или судебного анализа. Молекулярная диагностика, например, может выполняться с помощью магнитных гранул или флуоресцентных частиц, которые непосредственно или опосредованно присоединяются к целевым молекулам.
Краткое описание чертежей
Эти и другие аспекты изобретения будут очевидны из и разъяснены со ссылкой на вариант(ы) осуществления, описанные в дальнейшем. Эти варианты осуществления будут описаны в качестве примера с помощью прилагаемых чертежей, на которых:
фиг. 1 схематически показывает установку микроэлектронного сенсорного устройства согласно настоящему изобретению;
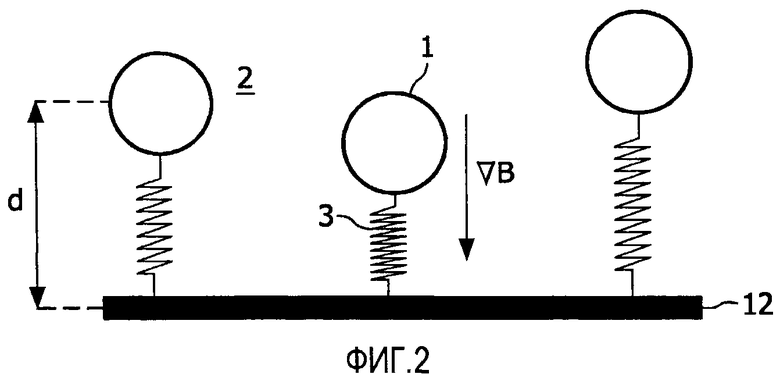
фиг. 2 более подробно показывает целевые частицы, которые связаны с местами связывания на поверхности связывания носителя;
фиг. 3-6 схематически показывают несколько примеров модуляции связанных целевых частиц вокруг разных осей.
Одинаковые номера ссылок на фигурах указывают ссылкой на идентичные или подобные компоненты.
Описание предпочтительных вариантов осуществления изобретения
На фиг. 1 показана основная установка с микроэлектронным сенсорным устройством согласно настоящему изобретению. Центральным компонентом этой установки является носитель 11, который, например, может быть изготовлен из стекла или прозрачного пластика, подобного полистиролу. Носитель 11 расположен возле отборной камеры 2, в которой может быть предусмотрен флюид образца с целевыми компонентами, которые должны детектироваться (например, лекарствами, антителами, ДНК (DNA) и т.д.). Образец дополнительно содержит магнитные частицы, например суперпарамагнитные гранулы, при этом эти частицы обычно связаны (например, посредством покрытия с антителами) в качестве меток с вышеупомянутыми целевыми компонентами. Только для простоты комбинация целевых компонентов и магнитных частиц показана на фигуре и будет называться «целевой частицей 1» в последующем. Должно быть отмечено, что вместо магнитных частиц также могли бы использоваться другие меточные частицы, например электрически заряженные или флуоресцентные частицы.
Граница раздела между носителем 11 и отборной камерой 2 сформирована поверхностью 12, называемой «поверхность связывания». Эта поверхность 12 связывания покрыта элементами 3 захвата, например антителами, которые могут специфически связываться с целевыми частицами.
Устройство сенсора содержит генератор 51 магнитного поля, например, электромагнит с обмоткой и сердечником, для управляемого вырабатывания магнитного поля B на поверхности 12 связывания и в смежном пространстве отборной камеры 2. С помощью этого магнитного поля B целевые частицы 1 могут подвергаться манипуляциям, то есть намагничиваться, а более точно, двигаться (если используются магнитные поля с градиентами). Таким образом, например, можно притягивать целевые частицы 1 к поверхности 12 связывания, для того чтобы ускорять связывание ассоциированных целевых частиц с упомянутой поверхностью. Второй электромагнит 51' в верхней части отборной камеры 2, по выбору, может использоваться для 'смывания' частиц 1, которые не были связаны (например, так как все места 3 связывания заняты). Это 'смывание' также может выполняться применением магнитных полей с использованием первого электромагнита 51 таким образом, что все несвязанные целевые частицы удаляются из пространства/объема измерения, как может делаться с использованием конфигурации с подковообразным электромагнитом. В этом случае силы связывания между целевыми частицами 1 и местами 3 связывания должны быть больше, чем прикладываемые магнитные силы, поэтому связи остаются нетронутыми во время процедуры смывания (при условии, что связь между местами 3 связывания и поверхностью 12 также является достаточно прочной). Кроме того, должно быть отмечено, что также могут использоваться электростатические силы, возбуждающие (немагнитные) меточные частицы с использованием переменного электрического поля.
Устройство сенсора дополнительно содержит источник 21 света, например лазер или СИД, который вырабатывает входной пучок L1 света, который пропускается в носитель 11 через «входное окно». Входной пучок L1 света прибывает на поверхность 12 связывания под углом θ, большим, чем критический угол θc полного внутреннего отражения (TIR), а потому подвергается полному внутреннему отражению в «выходном пучке света» L2. Выходной пучок L2 света покидает носитель 11 через другую поверхность («выходное окно») и детектируется оптическим детектором 31. Оптический детектор 31 определяет количество света выходного пучка L2 света (например, выраженное силой света этого пучка света во всем спектре или некоторой части спектра). Измеренные сигналы S сенсоров оцениваются и, по выбору, контролируются в течение периода наблюдения модулем 32 оценки и регистрации, который присоединен к детектору 31.
В качестве источника 21 света, например, может использоваться лазерный диод CD (λ=780 нм), DVD (λ=658 нм) или BD (λ=405 нм) коммерческого применения. Коллиматорная линза может использоваться, чтобы делать входной пучок L1 света параллельным, и микроотверстие, например, 0,5 мм может использоваться для уменьшения диаметра пучка.
Можно использовать детектор 31 также для выборки флуоресцентного света, испускаемого флуоресцентными частицами 1, которые возбуждались затухающей волной входного пучка L1 света, при этом эта флуоресценция, например, может спектрально отличаться от отраженного света L2. Хотя последующее описание концентрируется на измерении отраженного света, обсужденные здесь принципы с соответствующими изменениями могут также применяться к детектированию флуоресценции.
Описанное микроэлектронное сенсорное устройство применяет оптическое средство для детектирования целевых частиц 1. Для устранения или по меньшей мере минимизации влияния фона (например, флюида образца, такого как слюны, крови и т.д.), технология детектирования должна быть специфичной поверхности. Как указано выше, это достигается посредством использования принципа фрустрированного полного внутреннего отражения. Этот принцип основан на том обстоятельстве, что затухающая волна проникает (экспоненциально падая по интенсивности) в образец 2, когда падающий пучок L1 света подвергается полному внутреннему отражению. Если эта затухающая волна, в таком случае взаимодействует с другим материалом, подобным связанным целевым частицам 1, часть входного света будет собираться во флюид образца (это называется «фрустрированным полным внутренним отражением»), а интенсивность отраженного излучения будет уменьшена (в то время как интенсивность отраженного излучения будет 100% для чистой границы раздела и без взаимодействия). В зависимости от величины возмущения, то есть количества целевых частиц на или очень близко (в пределах около 200 нм) от поверхности TIR (не на подставке отборной камеры 2), интенсивность отраженного излучения будет падать соответственным образом. Должно быть отмечено, что эта «близко расположенная область» определяется глубиной ζ проникновения затухающей волны в отборной камере, которая зависит от длины λ, волны, угла θ освещения входного пучка L1 света и от показателей nA преломления подложки 11 и nB вещества непосредственно над границей 12 раздела (например, крови или воды), и задана следующей формулой:
 .
.
Это падение интенсивности является непосредственной мерой для количества связанных целевых частиц 1, а потому для концентрации целевых частиц в образце. Когда типичная длина зоны взаимодействия затухающей волны приблизительно от 100 до 200 нм сравнивается с типичными размерами антител, целевых молекул и магнитных гранул, ясно, что влияние фонового излучения будет минимальным. Большие длины λ волн будут увеличивать длину зоны взаимодействия, но влияние фоновой жидкости по-прежнему будет очень небольшим.
Описанная процедура оптического измерения является независящей от прикладываемых магнитных полей. Это предоставляет возможность оптического контроля в реальном времени этапов подготовки, измерения и промывки. Контролируемые сигналы также могут использоваться для управления измерением или отдельными этапами обработки.
Для материалов типичного применения вещество A носителя 11 может быть стеклом и/или каким-нибудь прозрачным пластиком с типичным показателем преломления nA=1,52. Вещество B в отборной камере 2 будет основоводным и иметь показатель преломления nB, близкий к 1,3. Это соответствует критическому углу θc в 60°. Угол падения θ=70°, поэтому, является практическим выбором для допущения жидкой среды с отчасти большим показателем преломления (при условии, что nA=1,52, допускается nB вплоть до максимума в 1,43). Более высокие значения nB потребовали бы большего nA и/или больших углов падения.
Преимущества описанного оптического считывания, комбинированного с магнитными метками для возбуждения, являются следующими:
- Недорогой картридж: Носитель 11 может состоять из относительно простой, полученной литьем под давлением детали из полимерного материала.
- Большие возможности мультиплексирования для исследования многочисленных исследуемых веществ: Поверхность 12 связывания в одноразовом картридже может оптически сканироваться по большой площади. В качестве альтернативы, является возможным формирование изображений большой площади, предоставляющее возможность большой матрицы детектирования. Такая матрица (расположенная на оптически прозрачной поверхности), например, может быть изготовлена струйной печатью разных связующих молекул на оптической поверхности. Способ также дает возможность исследования с высокой пропускной способностью в ячеистых пластинах посредством использования многочисленных пучков и многочисленных детекторов, а также многочисленных магнитов приведения в движение (движимых механически или возбуждаемых электромагнитным образом).
- Приведение в движение и считывание являются ортогональными: Магнитное приведение в движение целевых частиц (большими магнитными полями и градиентами магнитного поля) не оказывает влияния на процесс считывания. Поэтому оптический способ предоставляет возможность непрерывного контроля сигнала во время приведения в движение. Это дает много возможностей проникновения в суть процесса оценки, а это предоставляет возможность легких способов кинетического детектирования на основании крутизны сигналов.
- Система является действительно поверхностно чувствительной вследствие экспоненциального убывания переменного поля затухающих колебаний.
- Легкое сопряжение: Не требуются никакие электрические межсоединения между картриджем и считывателем. Оптическое окно и поверхность измерения оптического класса являются единственными требованиями к зонду картриджа. Поэтому может выполняться бесконтактное считывание.
- Возможно малошумящее считывание.
Проблема описанного подхода к измерению может возникать из-за того обстоятельства, что высок пусковой сигнал, то есть сигнал S сенсора, когда никакие целевые частицы 1 не присоединены к поверхности 12 связывания. Связывание целевых частиц с поверхностью связывания будет уменьшать этот высокий сигнал. Таким образом, сигнал 'x', соответствующий количеству целевых частиц, связанных с поверхностью связывания, измеряется методом (1-x), в то время как это оптический сигнал S. Это имеет недостаток, так как заинтересованы в сигнале 'x', который очень мал по сравнению с измеренным оптически сигналом (1-x). Это может вызывать так называемые «проблемы усиления», так как пусковой сигнал велик по отношению к сигналу 'x'. Поэтому трудно усиливать сигнал 'x', так как фоновый сигнал также усиливается, что, например, может иметь следствием «переполнение» в усилителях и АЦП (аналого-цифровых преобразователях, ADC) и усиление вкладов шумов, например, обусловленных флуктуациями интенсивности лазера или шумами детектора и т.д. К тому же измеренный сигнал 'x' очень чувствителен к отклонениям коэффициента усиления, так как отклонения коэффициента усиления не могут отличаться от изменений x. Более того, если фоновый сигнал изменяется, например, так как какой-нибудь свет из внешнего источника попадает в детектор или картридж, результат измерения подвергается влиянию, что крайне нежелательно.
Поэтому было бы крайне желательно, с точки зрения схемотехники и обработки сигналов, преобразовывать измерение (1-x) в измерение, которое измеряет только 'x', то есть количество целевых частиц 1, связанных с поверхностью 12 связывания.
Решение вышеприведенных проблем, которое предложено здесь, начинается с биологической пробы, как обычно, то есть инъекции магнитных гранул и образца с целевыми молекулами, связывания магнитных гранул и целевых молекул с «целевыми частицами» 1, связывания целевых частиц 1 с местами 3 связывания и смывания несвязанных целевых частиц. Как результат, есть поверхность 12 связывания с целевыми частицами 1, которые присоединяются к поверхности через элементы 3 захвата, например, простой белок BSA-opi. Количество света, который передается из входного пучка L1 света, пропорционально количеству целевых частиц 1, связанных с поверхностью 12 связывания. Однако количество передаваемого света также зависит от расстояния d между целевыми частицами 1 и поверхностью 12 связывания, то есть количеством 'целевых частиц', присутствующих в переменном поле затухающих колебаний (области 13 чувствительности), непосредственно над поверхностью.
Это более подробно проиллюстрировано на фиг. 2. Так как элемент 3 захвата (между поверхностью 12 связывания и целевой частицей 1) эластичен, целевые частицы 1 могут двигаться вверх-вниз при прикладывании переменного магнитного поля с градиентом ∇B и/или электрического поля (не показанного). Это также будет изменять количество света, который передается, что может наблюдаться в качестве «мерцания» участков, где целевые частицы связаны с поверхностью. Таким образом, есть сигнал, который могут модулировать на определенной частоте ωm, что дает возможность демодуляции на этой частоте ωm сигнала S сенсора, то есть может измеряться изменение оптической амплитуды, обусловленное модулированным движением целевых частиц 1. Это изменение пропорционально количеству целевых частиц 1, присутствующих на поверхности 12 связывания, то есть скорее получают требуемое измерение 'x', чем измерение (1-x).
Изменение расстояния d между поверхностью 12 связывания и целевой частицей 1, наряду с растяжением и сжатием простого белка 3 в промежутке, может выполняться несколькими способами:
- Посредством применения модулированного магнитного поля B (в то время как целевые частицы 1 являются суперпарамагнитными). Однако нелегко добиваться очень высоких частот (то есть частот >10 кГц), так как магнитные катушки будут иметь тенденцию рассеивать значительную мощность и будут вырабатывать много тепла. Тем не менее частоты в несколько кГц возможны.
- Посредством электрофореза: Можно притягивать целевые частицы 1 к поверхности 12 связывания с использованием статического магнитного (градиентного) поля и можно отталкивать целевые частицы 1 от поверхности 12 связывания электрическим полем. Когда электрическое поле выключается, целевые частицы отводятся обратно к поверхности, вновь посредством магнитного поля. Посредством применения периодического электрического поля, может достигаться периодическое движение вверх-вниз целевых частиц 1. С использованием этого образа действий, могут достигаться более высокие частоты, так как гораздо легче вырабатывать электрическое поле ВЧ (высокой частоты, HF), чем магнитное поле ВЧ. Статическое магнитное поле дает возможность больших амплитуд колебания, таким образом, более высокого сигнала на каждую связанную целевую частицу.
Микроэлектронное сенсорное устройство по фиг. 1 содержит в себе конкретный вариант осуществления вышеприведенного подхода, то есть блок 50 приведения в движение, который используется для индуцирования колебательного движения связанных целевых частиц 1. Блок 50 приведения в движение содержит блок 52 управления и модуляции, а также электромагниты 51 и 51' под и над отборной камерой 2 соответственно. Блок 52 управления и модуляции присоединен к электромагнитам 51, 51', чтобы индуцировать магнитное градиентное поле B внутри области 13 чувствительности. Это магнитное поле модулируется согласно сигналу модуляции, который пропорционален sin(ωmt), при этом этот сигнал модуляции передается из блока 52 управления и модуляции в модуль 32 оценки из условия, чтобы он мог там учитываться. В качестве альтернативы, блок приведения в движение мог бы быть сконструирован с электродами и противоэлектродами под и над отборной камерой 2 соответственно, посредством которых могло бы модулироваться электрическое поле в пределах отборной камеры.
Посредством использования вышеупомянутого способа модуляции, сигнал S сенсора может модулироваться надлежащим образом в модуле 32 оценки, чтобы добиваться сигнала, который прямо пропорционален количеству целевых частиц 1, которые связаны с поверхностью 12 связывания. Однако подход также дает возможность измерения некоторых свойств элементов 3 захвата (например, простого белка) между поверхностью связывания и целевыми частицами. Таким образом, структурная информация о простом белке может выводиться из наблюдаемого коэффициента добротности и резонансной частоты, а размер простого белка может выводиться из наблюдаемой амплитуды колебания целевых частиц. Более того, вязкость флюида (например, слюны), в котором происходит измерение, также может логически выводиться.
Более того, вследствие нелинейной зависимости между детектированным сигналом и положением по оси z частиц над поверхностью сенсора, гармоники в модулированном сигнале дают информацию о среднем значении упомянутого положения по оси z. Это может использоваться для измерения длины связывания по отношению к оптической поверхности, а также для получения характеристик зондов связывания.
В описанном способе значение 'x', которое выведено из сигнала S сенсора посредством модуляции, является независящим от фонового сигнала. Более того, 'x' не может быть находящимся под влиянием никаких возмущений, которые возникают на иной частоте, чем частота, используемая для модуляции/демодуляции, например, внешнего света, электронных помех и т.д.
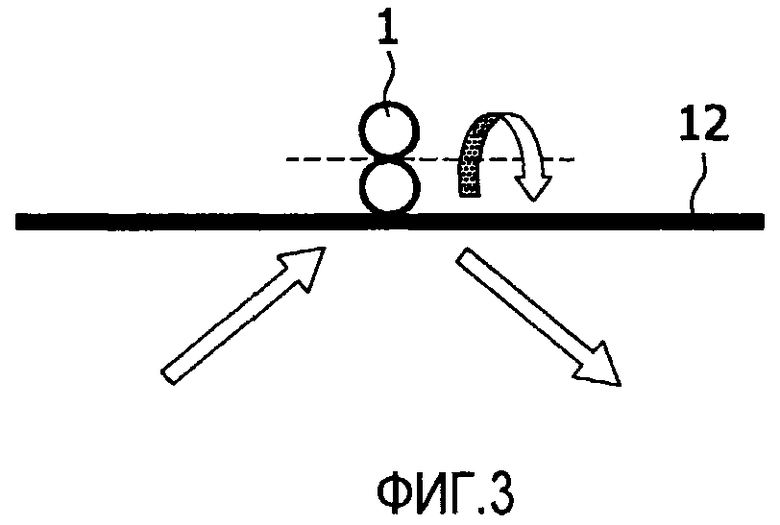
Фиг. 3 схематически показывает дополнительный пример изобретения. Показана поверхность 12 связывания, подобная фигурам, описанным выше. Две стрелки под поверхностью 12 связывания указывают направление света, сталкивающегося с поверхностью 12 связывания, как указано левой стрелкой, и отражаемого от поверхности 12 связывания, как указано правой стрелкой. Стрелки символически изображают направление света на поверхность 12 связывания и от поверхности 12 связывания соответственно. На фиг. 3 две целевые частицы 1 показаны связанными друг с другом и связанными с поверхностью 12 связывания. Этот кластер целевых частиц 1 образует физическую фигуру, которая асимметрична, и, тем самым, неравномерно распределенные силы прикладываются к этим целевым частицам 1. В более общем смысле, используются отдельные или объединенные целевые частицы, к которым может прикладываться механический крутящий момент, что требует несферического физического свойства частиц (или объединения частиц). Например, целевая частица может иметь магнитную и/или электрическую анизотропию, например, анизотропию формы и/или кристаллическую анизотропию. Целевые частицы 1 могут быть изготовлены, чтобы быть детектируемыми касательно силы и ориентации, прикладываемых средством неоднородного физического и/или химического свойства. Физическое свойство может быть электромагнитным свойством, например оптическим свойством, таким как зависящее от ориентации оптическое поглощение. Химическое свойство может быть химическим компонентом в качестве покрытия целевых частиц 1. Например, целевая частица 1 может быть покрыта несферическим образом оптически активным компонентом, например хемилюминесцентным ферментом или основой. Когда хемилюминесцентная реакция задействуется наряду с тем, что ориентация целевой частицы модулируется, как описано, в оптическом поле, получающийся в результате оптический сигнал также будет модулироваться. С детектированием этих модулированных сигналов предлагается проводить различие между разными типами целевых частиц 1 и также предлагается проводить различие между разными типами биологических связей между целевыми частицами 1. Это означает, посредством использования вращения целевых частиц 1, что может быть получено умозаключение о характере целевых частиц 1 и о характере связывания целевых частиц 1. Дополнительным эффектом от детектирования целевых частиц 1, имеющих вращение, как описано, является улучшенная чувствительность, посредством этого усиливается чувствительность детектирования. В примере выходящий свет отражается не полностью, а в зависимости от количества целевых частиц 1, особенно меточных частиц, содержащихся в целевых частицах 1, выходящий свет на правой стороне ослаблен по отношению к входящему свету на левой стороне. Это обусловлено отражениями света на меточных частицах, которые взаимосвязаны с количеством или объемом целевых компонентов (например, биологических веществ, подобных биомолекулам, комплексам, клеточным фракциям или клеткам).
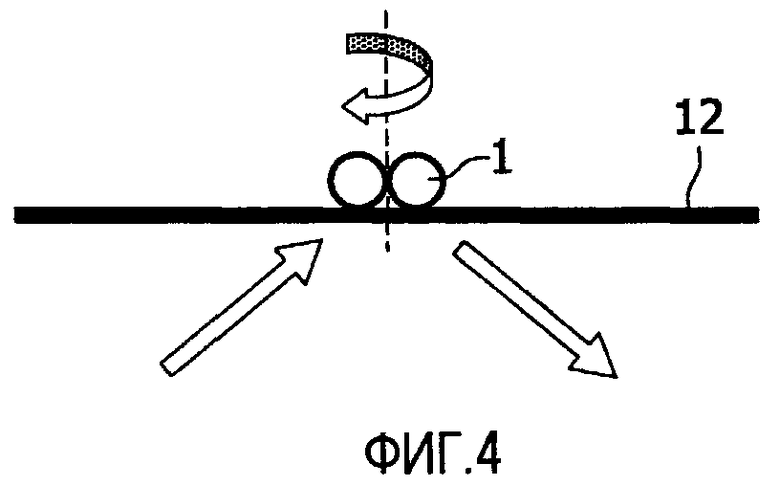
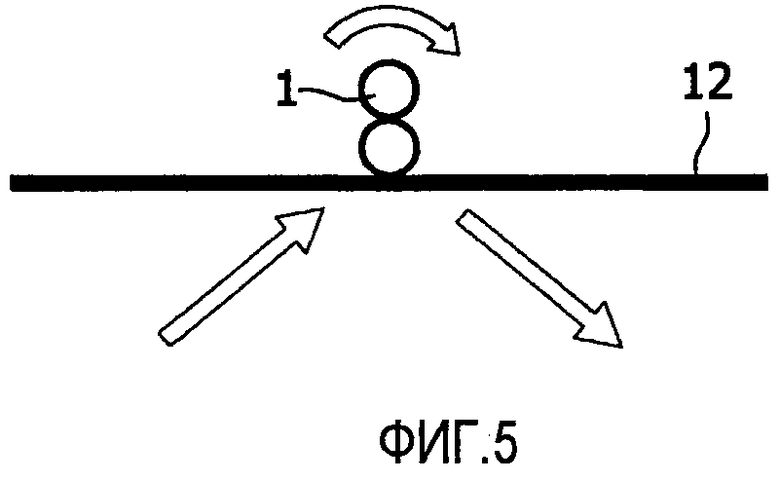
Пунктирная линия, показанная на фиг. 3, изображает ось вращения, вокруг которой являются вращаемыми целевые частицы 1, в этом примере, кластер двух целевых частиц 1, связанных вместе. Для дополнительной иллюстрации направления вращения, показана изогнутая двойная стрелка, которая дает направление вращения целевой частицы 1 вне плоскости изображения. Посредством изменения электрического или магнитного поля, вызывающего силу для вращения, направление вращения может изменяться на противоположное направление, показывающее на плоскость изображения. Предполагается, что вращение целевых частиц 1 должно вызываться их физическими свойствами, так как форма кластера из двух частиц целевых частиц 1 не является совершенно сферической и, следовательно, неоднородная сила или крутящий момент прикладывается к целевым частицам 1, приводя к вращению. Фиг. 4 показывает подобный пример изобретения, здесь целевые частицы 1 вновь связаны друг с другом, образуя кластер из двух, и скомпонованы по существу на одинаковом расстоянии параллельно поверхности 12 связывания. Ось вращения показана в виде пунктирной линии, перпендикулярной поверхности 12 связывания. Это означает, что направление вращения является по существу параллельным поверхности 12 связывания, приводя к вращательному движению целевых частиц 1, при котором расстояние от целевых частиц 1 до поверхности 12 связывания остается по существу одинаковым. Вновь направление вращения может изменяться в направлении по часовой стрелке или направлении против часовой стрелки. Фиг. 5 показывает дополнительный пример, в котором направление вращения лежит в пределах плоскости изображения фигур, ось вращения, поэтому направлена в плоскость изображения фигур. Так как целевые частицы 1 связаны в качестве кластера двух, вращение вокруг этой оси означает, что целевые частицы изменяют свои относительные положения во времени.
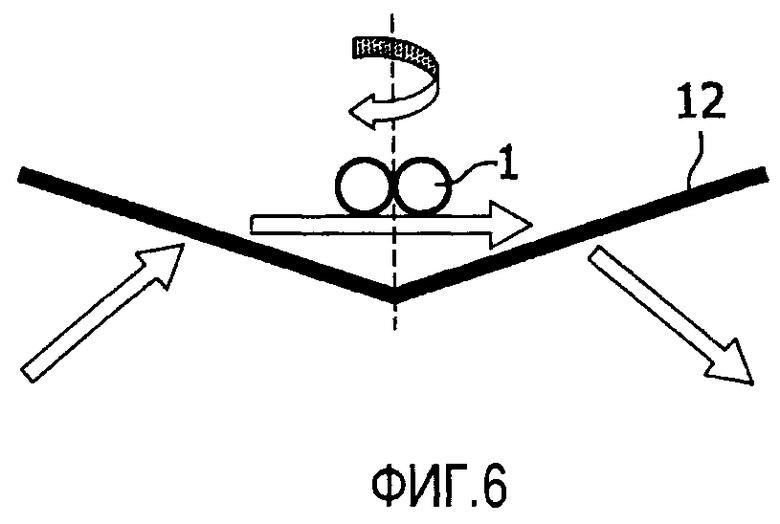
Еще одна структура поверхности 12 связывания показана на фиг. 6 в связи с другим способом оптического детектирования. Поверхность 12 связывания не является плоской поверхностью, как описано на фиг. 3-5, а является изогнутой поверхностью, будучи симметричной относительно вертикальной оси, лежащей в плоскости изображения. Одна часть поверхности 12 связывания является наклонной, другая часть поверхности 12 связывания расположена под углом, причем обе части имеют одинаковую длину и пересечение посередине, образуя симметричную кювету. Как следствие, нет полного отражения света на поверхности 12 связывания, как показано на фиг. 3-5, но, на фиг. 6, входящий свет, главным образом, направляется через одну наклонную часть поверхности 12 связывания и преломляется в направлении на противоположную другую расположенную под углом часть поверхности 12 связывания. Перед достижением расположенной под углом части поверхности 12 связывания, свет проходит через целевые частицы 1, где свет поглощается. На расположенной под углом части поверхности 12 связывания свет вновь проходит поверхность 12 связывания и вновь преломляется в том же самом направлении, как показано на фиг. 6. Детектор принимает отраженный свет, приходящий из описанной структуры, также см. фиг. 1. Вращение целевых частиц 1 в этом примере является таким же, как описанное по фиг. 4, кроме того, направления вращения являются поддающимися расчету.
Проблема модуляции движения целевых частиц с низкой частотой ωm может состоять в том, что детектирование результирующих низкочастотных сигналов происходит в диапазоне, где шумы выборки 1/f (электронного оборудования) могут иметь доминирующий вклад в шумы демодулированного сигнала. Для принятия мер в ответ на эту проблему могут использоваться дополнительная модуляция интенсивности источника 21 света и ассоциативно связанная технология модуляции. Фиг. 1 указывает, в этом отношении, что входной пучок L1 света, испускаемый источником 21 света, также демодулируется и что соответствующий синусоидальный сигнал sin(ω1t) модуляции передается в модуль 32 оценки. Высокочастотная модуляция (вплоть до нескольких 100 МГц) лазерного диода может достигаться простым образом, просто посредством модуляции инжектированного тока лазера. Эта модуляция тока лазера широко используется в применениях оптического хранения для подавления шумов интенсивности, обусловленных оптической обратной связью. Посредством комбинирования этой модуляции силы света (высокой частоты ω1) с вышеупомянутой модуляцией магнитного или электрического поля (средней частоты ωm), сигнал, обусловленный модуляцией магнитного/электрического поля средней частоты (сигнал «колеблющихся целевых частиц»), может преобразовываться в область высоких частот, которая является преимущественной по отношению к шумам электронного оборудования. Сигнал колеблющихся целевых частиц фигурирует в этой схеме в качестве боковой полосы суммы и разности в области высоких частот (МГц) согласно формуле:

Посредством использования этой схемы двойной модуляции (среднечастотный) сигнал колеблющихся целевых частиц может без труда измеряться на высоких частотах. Для того чтобы устранять ложную перекрестную помеху от сигнала, обусловленного изменениями интенсивности и паразитными отражениями (присутствующими на частоте ω1), боковые полосы должны быть достаточно отделены от основной полосы, имеющей место на ω1. Это требует схемы устойчивых колебаний, возбуждающей лазер. С использованием частоты ω1 модуляции лазера, например, в 100 кГц и частоты ωm модуляции магнитного или электрического поля в 1 кГц устойчивость формирователя лазера должна быть хорошей ниже 1 кГц, когда задействован на 100 кГц, что может быть без труда достигнуто на практике.
Более того, вследствие нелинейной зависимости между детектированным сигналом и положением по оси z частиц над поверхностью сенсора, элементы более высокой взаимной модуляции в сигнале дают информацию о среднем значении упомянутого положения по оси z. Это может использоваться для измерения длины связывания по отношению к оптической поверхности, а также для получения характеристик зондов связывания.
Когда (ПЗС) камера используется для наблюдения поверхности 12 связывания, упомянутая камера может быть слишком медленной, чтобы следить за модуляцией магнитного или электрического поля (частотой ωm) и/или лазерного входного пучка света (частотой ω1). Эта проблема может быть решена:
(1) синхронизацией по фазе частоты кадров камеры частотой модуляции и
(2) настройкой времени (открывания фотообъектива) подсветки достаточно коротким для выборки (части) периода модуляции.
Посредством сдвигания фазы момента подсветки по отношению к периоду модуляции может сканироваться весь период. Использование камеры обладает преимуществами в многоточечной обработке по сравнению с одноточечными подходами.
Несмотря на то, что изобретение было описано выше со ссылкой на конкретные варианты осуществления, возможны различные модификации и расширения, например:
- Сенсор может быть любым пригодным сенсором для детектирования наличия магнитных частиц на или возле поверхности сенсора, на основании любого свойства частиц, например он может детектировать с помощью магнитных способов, оптических способов (например, формирования изображения, флуоресценции, хемилюминесценции, поглощения, рассеяния, резонанса поверхностного плазмона и т.д.), акустического детектирования (например, поверхностных акустических волн и т.д.), электронного детектирования и т.д.
- В дополнение к молекулярным пробам большие части также могут детектироваться устройствами сенсора согласно изобретению, например клетки, вирусы или фракции клеток или вирусов, внутритканевая вытяжка и т.д.
- Детектирование может происходить с или без сканирования элемента сенсора относительно поверхности сенсора.
- Данные измерений могут получаться в качестве конечного измерения, а также посредством кинетической или периодической записи сигналов.
- Устройство и способ могут использоваться с несколькими типами биохимических проб, например вяжущей/невяжущей пробой, многослойной пробой, конкурентной пробой, пробой замещения, ферментативной пробой и т.д.
- Устройство и способ пригодны для мультиплексирования сенсоров (то есть параллельного использования разных сенсоров и поверхностей сенсоров, например разные захватные зонды могут быть расположены пятнами на поверхности, например, посредством пробонанесения или струйной печати на оптической подложке), мультиплексирования меток (то есть параллельного использования разных типов меток) и мультиплексирования камер (то есть параллельного использования разных реакционных камер).
- Устройство и способ могут использоваться в качестве быстрых, устойчивых к ошибкам и легких для использования биосенсоров пунктов медико-санитарной помощи для небольших объемов образцов. Реакционная камера может быть предметом однократного использования, который должен использоваться с компактным считывателем, содержащим в себе одно или более средств выработки поля и одно или более средств детектирования. К тому же устройство, способы и системы по настоящему изобретению могут использоваться при автоматизированных исследованиях большой пропускной способности. В этом способе реакционная камера, например, является ячеистой пластиной или кюветой, вставленной в автоматизированный прибор.
В заключение, обращено внимание, что в настоящей заявке термин «содержащий» не исключает другие элементы или этапы, что употребление единственного числа не исключает множественности и что одиночный процессор или другой блок может выполнять функции нескольких средств. Изобретение пребывает в каждом и любом новейшем отличительном признаке, а также каждой и любой комбинации отличительных признаков. Более того, символы ссылок в формуле изобретения не должны истолковываться в качестве ограничивающих ее объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| НОСИТЕЛЬ ДЛЯ ОПТИЧЕСКОГО ДЕТЕКТИРОВАНИЯ В МАЛЫХ ОБЪЕМАХ ОБРАЗЦА | 2009 |
|
RU2502985C2 |
| СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЦЕЛЕВОГО ВЕЩЕСТВА | 2010 |
|
RU2519505C2 |
| СИСТЕМА И СПОСОБ ДЕТЕКТИРОВАНИЯ | 2009 |
|
RU2494375C2 |
| СИСТЕМА БИОДАТЧИКА НА ОСНОВЕ НАРУШЕННОГО ПОЛНОГО ВНУТРЕННЕГО ОТРАЖЕНИЯ (НПВО) И СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА ДАТЧИКА, ОСНОВАННОГО НА НПВО | 2008 |
|
RU2492450C2 |
| БИОСЕНСОР С КВАДРУПОЛЬНОЙ МАГНИТНОЙ СИСТЕМОЙ ВОЗДЕЙСТВИЯ | 2009 |
|
RU2519017C2 |
| ВОЗБУЖДЕНИЕ МАГНИТНЫХ ШАРИКОВ С ИСПОЛЬЗОВАНИЕМ ОБРАТНОЙ СВЯЗИ ДЛЯ БИОСЕНСОРА НА ОСНОВЕ НПВО | 2009 |
|
RU2526198C2 |
| МИКРОЭЛЕКТРОННОЕ СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЧАСТИЦ-МЕТОК | 2007 |
|
RU2487338C2 |
| ИЗМЕРЕНИЕ ПАРАМЕТРОВ АГГЛЮТИНАЦИИ | 2007 |
|
RU2460058C2 |
| СЕНСОРНЫЙ ЭЛЕМЕНТ И СПОСОБ ДЕТЕКТИРОВАНИЯ ИЗМЕНЕНИЯ СОСТАВА ИССЛЕДУЕМОЙ ЖИДКОЙ ИЛИ ГАЗООБРАЗНОЙ СРЕДЫ | 2016 |
|
RU2637364C2 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ АНАЛИЗА БИОЛОГИЧЕСКИХ ЖИДКОСТЕЙ | 2009 |
|
RU2524657C2 |
Изобретение относится к микроэлектронному сенсорному устройству для исследования целевых частиц (1), которые связаны с местами (3) связывания на поверхности (12) связывания носителя (11). Входной пучок (L1) света передается на носитель (11), где имеет место фрустрированное полное внутреннее отражение (FTIR) на поверхности (12) связывания. Количество света в получающемся в результате выходном пучке (L2) света детектируется оптическим детектором (31) и дает информацию о наличии целевых частиц на поверхности связывания. Блок (50) приведения в движение индуцирует вращение связанных целевых частиц (1) посредством взаимодействия с магнитным полем (В) или электрическим полем, с заданной частотой (ωm) модуляции, из условия, чтобы посредством демодуляции сигнала (S) детектора эффекты целевых частиц могли отличаться от фона. Изобретение обеспечивает повышение точности и чувствительности детектирования. 3 н. и 20 з.п. ф-лы, 6 ил.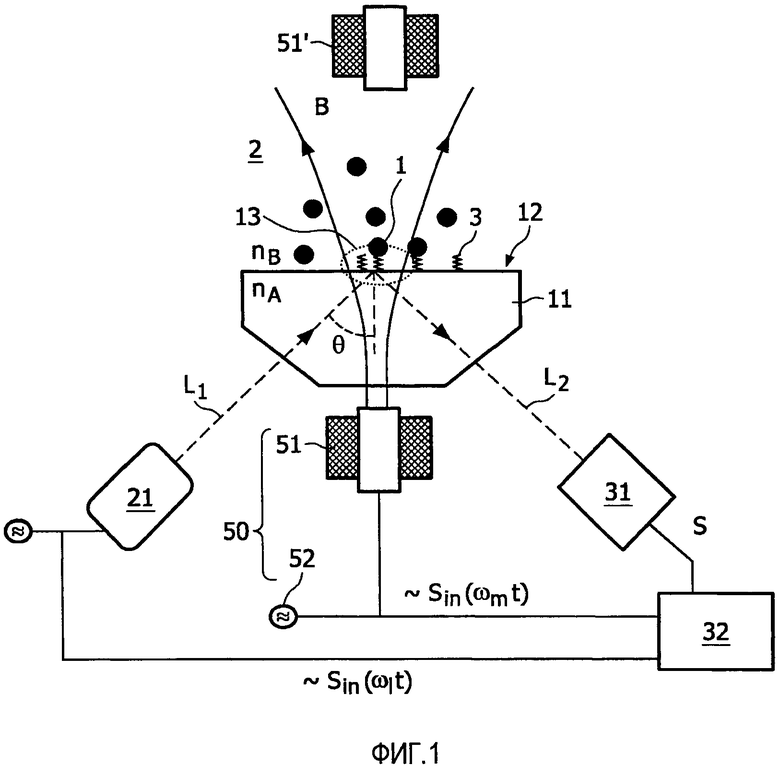
1. Микроэлектронное сенсорное устройство для исследования целевых частиц (1), которые связаны с местами (3) связывания на поверхности (12) связывания носителя (11), содержащее:
a) блок (21, 31) сенсора для выдачи сигнала (S) сенсора, который является указывающим на присутствие целевых частиц (1) в области (13) чувствительности блока сенсора;
b) блок (50) приведения в движение для избирательного индуцирования вращения связанных целевых частиц (1) относительно области (13) чувствительности блока сенсора;
c) модуль (32) оценки для оценки сигнала (S) сенсора с учетом индуцированного вращения целевых частиц (1).
2. Микроэлектронное сенсорное устройство по п.1, выполненное с возможностью движения целевых частицы (1) через зоны разной чувствительности блока сенсора в области (13) чувствительности.
3. Микроэлектронное сенсорное устройство по п.1, выполненное с возможностью движения целевых частиц (1) посредством взаимодействия с магнитным полем (В) или электрическим полем.
4. Микроэлектронное сенсорное устройство по п.1, выполненное с возможностью модулирования индуцированного движения связанных целевых частиц (1), предпочтительно периодически, с частотой (ωm) модуляции.
5. Микроэлектронное сенсорное устройство по п.1, выполненное с возможностью модулирования индуцированного движения связанных целевых частиц (1) вокруг оси, проходящей через целевые частицы (1), посредством целевых частиц (1), сконструированных имеющими несферические формы.
6. Микроэлектронное сенсорное устройство по п.1, в котором сигнал (S) сенсора получают из выходного пучка (L2) света блока (31) сенсора, причем пучок (L2) света содержит свет из фрустрированного полного внутреннего отражения входного пучка (L1) света блока (21) сенсора на поверхности (12) связывания.
7. Микроэлектронное сенсорное устройство по п.6, выполненное с возможностью модулирования входного пучка (L1) света, предпочтительно периодически, с входной частотой (ω1).
8. Микроэлектронное сенсорное устройство по п.6, выполненное с возможностью детектирования выходного пучка (L2) света камерой, снимающей экспозиции с
(a) частотой, которая синхронизирована по фазе, но является меньшей, чем частота (ωm, ω1) модуляции выходного пучка (L2) света;
(b) продолжительностью выдержки, меньшей, чем период модуляции выходного пучка света.
9. Микроэлектронное сенсорное устройство по п.6, в котором сигнал (S) сенсора демодулируется, в частности, относительно модуляции индуцированного движения целевых частиц (1) и/или относительно модуляции входного пучка (L1) света.
10. Микроэлектронное сенсорное устройство по п.6, в котором модуляция индуцированного движения целевых частиц (1) присутствует в демодулированном сигнале (S) сенсора в качестве боковой полосы относительно модуляции входного пучка (L1) света.
11. Микроэлектронное сенсорное устройство по п.1, в котором сигнал (S) сенсора оценивают относительно присутствия и/или количества целевых частиц (1) в области (13) чувствительности блока (21, 31) сенсора и/или относительно характеристик связывания указанного связывания между целевыми частицами (1) и поверхностью (12) связывания.
12. Способ исследования целевых частиц (1), которые связаны с местами (3) связывания на поверхности (12) связывания носителя (11), состоящий в том, что:
a) измеряют с помощью блока (21, 31) сенсора сигнал (S) сенсора, который является указывающим на присутствие целевых частиц (1) в области (13) чувствительности блока сенсора,
b) избирательно индуцируют с помощью блока (50) приведения в движение вращение связанных целевых частиц (1) по отношению к области (13) чувствительности блока сенсора;
c) оценивают с помощью модуля (32) оценки сигнал (S) сенсора с учетом индуцированного вращения целевых частиц (1).
13. Способ по п.12,
отличающийся тем, что целевые частицы (1) движутся через зоны разной чувствительности блока сенсора в области (13) чувствительности.
14. Способ по п.12,
отличающийся тем, что целевые частицы (1) движутся посредством взаимодействия с магнитным полем (В) или электрическим полем.
15. Способ по п.12,
отличающийся тем, что индуцированное движение связанных целевых частиц (1) модулируют, предпочтительно периодически, с частотой (ωm) модуляции.
16. Способ по п.12,
отличающийся тем, что индуцированное движение связанных целевых частиц (1) модулируют вокруг оси, проходящей через целевые частицы (1),
посредством целевых частиц (1), сконструированных имеющими несферические формы.
17. Способ по п.12, отличающийся тем, что сигнал (S) сенсора получают из выходного пучка (L2) света блока (31) сенсора, который содержит свет из фрустрированного полного внутреннего отражения входного пучка (L1) света блока (2) сенсора на поверхности (12) связывания.
18. Способ по п.17,
отличающийся тем, что входной пучок (L1) света модулируют, предпочтительно периодически, с входной частотой (ω1).
19. Способ по п.17,
отличающийся тем, что выходной пучок (L2) света детектируют камерой, снимающей экспозиции с
(a) частотой, которая синхронизирована по фазе, но является меньшей, чем частота (ωm, ω1) модуляции выходного пучка (L2) света;
(b) продолжительностью выдержки, меньшей, чем период модуляции выходного пучка света.
20. Способ по п.17,
отличающийся тем, что сигнал (S) сенсора демодулируется, в частности, относительно модуляции индуцированного движения целевых частиц (1) и/или относительно модуляции входного пучка (L1) света.
21. Способ по п.20,
отличающийся тем, что модуляция индуцированного движения целевых частиц (1) присутствует в демодулированном сигнале (S) сенсора в качестве боковой полосы относительно модуляции входного пучка (L1) света.
22. Способ по п.12,
отличающийся тем, что сигнал (S) сенсора оценивают относительно присутствия и/или количества целевых частиц (1) в области (13) чувствительности блока (21, 31) сенсора и/или относительно характеристик связывания указанного связывания между целевыми частицами (1) и поверхностью (12) связывания.
23. Применение микроэлектронного сенсорного устройства по любому из пп.1-11 для молекулярной диагностики, биологического анализа образцов или химического анализа образцов.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 6333200 B1, 25.12.2001 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| СПОСОБ АНАЛИЗА СМЕСИ БИОЛОГИЧЕСКИХ И/ИЛИ ХИМИЧЕСКИХ КОМПОНЕНТОВ С ИСПОЛЬЗОВАНИЕМ МАГНИТНЫХ ЧАСТИЦ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2166751C1 |

