Настоящее изобретение относится к способу определения количества целевого компонента в образце, при котором магнитные частицы могут специфично связываться с контактной поверхностью с кинетикой, которая зависит от количества целевого компонента в образце. Кроме того, оно относится к сенсорному устройству для выполнения такого способа и к сопутствующей компьютерной программе.
В WO 2008/102218 A1 раскрыто сенсорное устройство для регистрации магнитных частиц, при этом частицы перемещают с помощью магнитного поля, которое является пульсирующим для снижения величины кластеризации частиц. Когда нужно определять количество магнитных частиц, связанных со связывающей поверхностью, несвязанные магнитные частицы удаляют с помощью пульсирующего магнитного поля.
В WO 2006/134569 A2 раскрыт биосенсор, которым можно обнаруживать связанные с поверхностью магнитные частицы. Чтобы отличить специфично и неспецифично связанные частицы, обнаружение может быть проведено в ходе повторяющихся циклов магнитного отмывания. Концентрация мишени может быть определена по крутизне полученных данных обнаружения или при измерении конечной точки.
В WO 2005/111615 A1 раскрыта детекторная система, в которой магнитные частицы повторно притягивают к реакционной поверхности. Сигнал, вызываемый частицами в электрических катушках, определяют в промежуточные моменты времени, во время которых магнитное поле выключено, а концентрацию мишени определяют по ходу результатов этих измерений во времени.
В WO 03/049530 A2 раскрыт способ, в котором магнитные частицы отмывают в потоке текучей среды. Частицы могут быть иммобилизованы на стенке проточной камеры посредством магнитных полей.
В WO 02/29411 A2 раскрыта процедура, в которой магнитные бусины соединяют с химическими или биологическими средствами, посредством которых они могут дополнительно связываться с коллоидными частицами. Затем магнитные бусины попадают к различным участкам на поверхности, из которых высвобождаются магнитные бусины без коллоидных частиц. Эта процедура может быть повторена несколько раз.
В WO 2009/007797 A1 раскрыто биосенсорное устройство с множеством генераторов магнитного поля, которыми можно управлять правильным размещением подвижного носителя образца. Указано, что с носителем могут быть проведены измерения кинетики и конечной точки.
В US 6991938 B1 раскрыт способ, в котором связывание целевого вещества в образце с поверхностью непрерывно контролируют и коррелируют с количеством упомянутого целевого вещества в образце. Однако проблема данного подхода состоит в том, что на измерения обычно оказывают влияние неспецифично связанные части целевого вещества.
Исходя из данных предпосылок, целью настоящего изобретения является обеспечение средств для надежного определения количества целевого компонента в образце.
Эта цель достигается посредством способа по пункту 1, сенсорного устройства по пункту 12, компьютерной программы по пункту 13 и применения по пункту 14 формулы изобретения. Предпочтительные варианты воплощения раскрыты в зависимых пунктах формулы изобретения.
Способ по настоящему изобретению служит для определения количества целевого компонента в образце, при котором магнитные частицы могут специфично связываться с контактной поверхностью камеры для образца, которую заполняют образцом, и при этом упомянутое связывание имеет место с кинетикой, которая зависит от количества целевого компонента в образце. Количество искомого целевого компонента в дальнейшем кратко обозначено «количество в образце». Как правило, его измеряют в виде концентрации, например, в виде массы на единицу объема или числа частиц на единицу объема. «Целевой компонент» может содержать, например, биологические вещества, такие как биомолекулы, комплексы, клеточные фракции или клетки.
Термин «магнитная частица» обозначает намагниченную или намагничивающуюся частицу (молекулу, комплекс, наночастицу, микрочастицу и т.д.), например суперпарамагнитную бусину. Магнитные частицы часто используются в качестве меток для целевого компонента, представляющего интерес, и химически связываются с ним.
Как правило, «камера для образца» представляет собой пустую полость или полость, заполненную некоторым веществом, таким как гель, которое может абсорбировать вещество образца; она может представлять собой открытую полость, закрытую полость или полость, соединенную с другими полостями посредством каналов соединения по текучей среде. Одна часть стенки камеры для образца представляет собой «контактную поверхность», с которой могут специфично связываться магнитные частицы. Как правило, с этой целью контактную поверхность покрывают участками связывания (например, антителами), с которыми могут специфично связываться магнитные частицы (содержащие соответствующие антигены).
Способ содержит следующие стадии:
a) По меньшей мере две «стадии отмывания», на которых воздействуют магнитной силой на магнитные частицы на контактной поверхности так, что несвязанные магнитные частицы перемещаются от контактной поверхности. Хотя такое перемещение часто направлено перпендикулярно от контактной поверхности, оно также может включать боковые составляющие или даже (по меньшей мере промежуточное) приближение к поверхности. Подходящими магнитными силами можно воздействовать, в частности, путем создания магнитного поля на контактной поверхности с ненулевым градиентом, направленным от поверхности. Необязательно магнитная сила может быть достаточно велика для удаления с контактной поверхности также и тех магнитных частиц, которые связаны, но связаны неспецифично, например, не посредством гибридизации со специфичными участками связывания, а только посредством более слабых сил. По меньшей мере два выполнения стадии отмывания разделяют (ненулевыми) временными интервалами, в которых не происходит удаление магнитных частиц, которое будет эквивалентно отмыванию.
b) По меньшей мере две «стадии измерения» (каждая из них связана с другой из вышеуказанных стадий отмывания), на которых общее количество магнитных частиц на контактной поверхности измеряют в ходе связанной стадии отмывания. Следует отметить, что «общее количество магнитных частиц» содержит специфично связанные магнитные частицы, а также неспецифично связанные и несвязанные частицы. Кроме того, длительность измерения не зависит от длительности стадии отмывания. Поэтому измерение «в ходе» стадии отмывания, как правило, означает мгновенное измерение в любой момент времени в интервале стадии отмывания, причем этот интервал по определению должен также содержать момент после окончания активного удаления магнитных частиц. Кроме того, следует отметить, что количество магнитных частиц можно измерять магнитным образом, т.е. посредством обнаружения их магнетизма или посредством любого другого подходящего способа, например, обнаружения флуоресцентной метки, прикрепленной к магнитным частицам.
c) «Стадия оценки», на которой желаемое количество целевого компонента в образце оценивают с помощью результатов измерений стадий измерения.
Описанный способ обладает тем преимуществом, что он позволяет определять количество целевого компонента в образце («количество в образце») из измерений на контактной поверхности, которые можно выполнять в ходе проходящего процесса связывания магнитных частиц с контактной поверхностью. Это обусловлено тем, что используют магнитное отмывание несвязанных магнитных частиц, которое обеспечивает точные измерения без замены образца. Способ является быстрым, поскольку не нужно ждать до тех пор, пока будет достигнуто возможно, очень медленно установившееся состояние. Кроме того, способ обеспечивает расширенный динамический диапазон, предоставляя возможность определения высоких количеств целевого компонента в образце, которые ведут к насыщению связывания на контактной поверхности в установившемся состоянии и которые поэтому не поддаются надежному определению в установившемся состоянии. Такое расширение верхнего динамического предела позволяет использовать более крупные магнитные частицы, что в свою очередь улучшает нижний предел чувствительности.
Магнитные частицы предпочтительно притягивают к контактной поверхности силой магнитного притяжения, например, созданной соответственно ориентированным градиентом магнитного поля, до и/или после стадии отмывания a). Таким образом, можно ускорить связывание магнитных частиц с контактной поверхностью. Усилие магнитного притяжения следует знать и/или точно контролировать, поскольку оно влияет на результат стадии измерения b), которую выполняют в ходе нестационарного процесса.
Измерение общего количества магнитных частиц на контактной поверхности на стадии измерения b) предпочтительно выполняют в конце связанной с ней стадии отмывания a), чтобы гарантировать, что с контактной поверхности удалено как можно больше несвязанных магнитных частиц.
Стадию отмывания a) можно повторять несколько раз, при этом выполнения стадии отмывания отделяют (ненулевыми) временными интервалами, в которых не происходит удаление несвязанных магнитных частиц. Как правило, эти промежуточные временные интервалы используют для магнитного притяжения частиц к контактной поверхности. Следует отметить, что все примечания и модификации, разъясненные выше и ниже относительно «стадии отмывания a)», также применимы ко всем повторениям этой стадии.
Несмотря на то, что в вышеуказанном варианте воплощения изобретения стадию отмывания a) выполняют несколько раз, связанную стадию измерения b) можно выполнять только дважды, т.е. только для двух единичных из нескольких стадий отмывания. Однако предпочтительно стадии измерения b) выполняют для всех выполнений стадии отмывания a). Следует отметить, что все примечания и модификации, разъясненные выше и ниже относительно «стадии измерения b)», также применимы ко всем повторениям этой стадии.
Результаты по меньшей мере двух измерений, полученные этим способом, предпочтительно используют, основывая стадию оценки c) на множестве результатов измерений, полученных на различных стадиях измерения b). Это можно сделать, например, путем оценки значения количества целевого компонента в образце по каждому отдельному измерению и последующего вычисления соответствующего статистического среднего этих значений. В другом подходе множество результатов измерений, полученных на различных стадиях измерения, можно использовать, основывая оценку количества в образце на изменении результатов измерений. Таким образом, например, можно вычислить скорость изменения (крутизну) результатов измерений, которая относится к кинетике процесса связывания и, таким образом, также является надежным показателем количества искомого целевого компонента в образце.
В основании оценки количества целевого компонента в образце может альтернативно лежать единственный результат измерения, полученный на стадии b), что является простым и быстрым способом определить упомянутое количество во многих ситуациях.
На практике оказывается, что описанные альтернативные варианты основывания оценки количества целевого компонента в образце на (i) изменении результатов измерений (т.е. на кинетике) или (ii) единственном результате измерения, позволяют достичь своей наивысшей точности для различных количеств целевого компонента в образце. Когда значение ожидаемого количества целевого компонента в образце задано, его можно использовать для автоматического выбора наиболее подходящего варианта способа, т.е. для основывания оценки на изменении нескольких результатов измерений, или на одном единственном результате измерения, или на сочетании обоих подходов. При анализах, в которых количество связанных магнитных частиц увеличивается с количеством целевого компонента в образце (например, в сэндвич-анализе), первый вариант будет, как правило, предпочтительным для высоких значений ожидаемого количества в образце, а второй вариант - для более низких значений. Обратное правило справедливо, например, для анализов ингибирования, в которых низкие количества целевого компонента в образце соответствуют высоким количествам связанных магнитных частиц, и наоборот. В целом можно сказать, что для анализов с быстрым связыванием и/или с многочисленными связанными магнитными частицами предпочтительно измерение на основе кинетики, тогда как для анализов с медленным связыванием и/или с немногими связанными магнитными частицами выгодно использовать отдельные измерения.
Вышеуказанное ожидаемое количество целевого компонента в образце можно задать заранее, например, посредством дополнительной доступной информации о тестируемом образце. Однако предпочтительно ожидаемое количество целевого компонента в образце оценивают на основе первых результатов измерений, полученных во время проходящего анализа. Таким образом, способ можно сделать самоадаптируемым и автоматически выбирать оптимальную процедуру для исследования образцов с полностью неизвестным содержанием целевого компонента.
Согласно изобретению хронометраж (т.е. начало, конец) оставшихся стадий отмывания и стадий измерения определяют на основе результатов измерений уже выполненных стадий отмывания и стадий измерения. Если первые результаты измерений показывают высокое количество целевого компонента в образце, то можно, например, запланировать оптимальные стадии измерения для определения кинетики; если они указывают на низкое количество целевого компонента в образце, то можно оптимально запланировать одну единственную стадию измерения для «измерения конечной точки».
Стадия магнитного отмывания a) может быть такой, что приблизительно все (т.е. более чем 80%, предпочтительно более чем 90%) магнитные частицы, которые специфично не связаны с контактной поверхностью, удаляют с контактной поверхности в конце этой стадии. Этого можно добиться, приложив подходящие магнитные силы, которые являются, например, достаточно высокими и длятся достаточно долго. После этого измерение в конце стадии отмывания будет по существу включать только количество специфично связанных магнитных частиц.
Альтернативно, стадия отмывания a) может быть такой, что только некоторую долю магнитных частиц, которые специфично не связанны, удаляют с контактной поверхности в ходе этой стадии. Такое частичное отмывание может быть предпочтительным, если полное отмывание займет слишком много времени, в частности, если будет выполняться множество стадий отмывания, которые позволяют определить изменение результатов измерений.
В зависимости от преобладающего количества целевого компонента в образце и характера связывания магнитных частиц, насыщения доступных участков связывания на контактной поверхности можно достичь более или менее быстро. Хронометраж стадий отмывания и связанных с ними стадий измерения будет предпочтительно учитывать этот факт, чтобы избежать того, что измерения будут проведены слишком рано (когда с контактной поверхностью связано недостаточно магнитных частиц) или слишком поздно (когда насыщение на контактной поверхности уже достигнуто). Этого можно добиться, например, если по меньшей мере одну стадию отмывания и связанную с ней стадию измерения выполняют
i) после заданной меньшей доли и/или
ii) до заданной большей доли
ожидаемого общего времени, необходимого для достижения насыщения поверхности. Меньшая доля может, например, соответствовать примерно 20%, а большая доля - примерно 80% от общего времени до достижения насыщения поверхности. Если отсутствует доступная оценка ожидаемого общего времени до достижения насыщения поверхности в конкретном образце, можно взять глобально достоверные граничные значения. Таким образом, хронометраж последней стадии измерения («измерение конечной точки») будет, как правило, зависеть от наименьшего количества целевого компонента, которое необходимо измерить, тогда как более ранние «измерения средней точки» хронометрируют так, чтобы позволить определить наибольшее количество целевого компонента, которое необходимо измерить.
На стадии оценки c) используется тот факт, что связывание магнитных частиц с контактной поверхностью подчиняется физическим/химическим законам в зависимости от количества целевого компонента в образце. Следовательно, результаты измерений, полученные в ходе промежуточных стадий отмывания, воспроизводимо соотносятся с количеством целевого компонента в образце, что позволяет сделать заключение о количестве целевого компонента в образце исходя из измерений. Необходимое для оценки математическое соотношение между результатами измерений и количеством в образце можно вывести из теоретических принципов. Однако предпочтительно это соотношение определяют исходя из процедуры калибровки, проводимой с опытными образцами, имеющими различные известные количества целевого компонента в образце. Калибровочные данные, полученные таким образом, можно использовать в качестве основы для стадии оценки. Их можно предоставить в виде, например, справочной таблицы или в виде математической формулы с подобранными параметрами.
Изобретение дополнительно относится к сенсорному устройству, которое содержит следующие компоненты:
a) Камера для образца, в которой может быть предусмотрен образец, содержащий целевой компонент и магнитные частицы, причем камера для образца имеет контактную поверхность, на которой могут специфично связываться магнитные частицы.
b) Магнитный манипулятор для воздействия магнитной силой на магнитные частицы на контактной поверхности так, что несвязанные магнитные частицы перемещаются от контактной поверхности. Магнитный манипулятор может быть реализован, например, электромагнитом, который генерирует градиент магнитного поля на контактной поверхности.
c) Блок датчика для измерения общего количества магнитных частиц на контактной поверхности. Блок датчика может представлять собой, например, блок оптического, магнитного, механического, акустического, теплового и/или электрического датчика. В частности, блок магнитного датчика может содержать катушку, датчик Холла, плоский датчик Холла, датчик неоднородностей магнитного поля, СКВИД (сверхпроводящий квантовый интерференционный датчик), магнитно-резонансный датчик, магниторестриктивный датчик или магниторезистивный датчик типа, описанного в WO 2005/010543 A1 или WO 2005/010542 A2, в особенности ГМС (гигантское магнитосопротивление), ТМС (туннельное магнитосопротивление) или АМС (анизотропное магнитосопротивление). Блок оптического датчика может быть, в частности, приспособлен для обнаружения изменений в выходном пучке света, которые обусловлены нарушенным полным внутренним отражением за счет частиц на чувствительной поверхности. Идеи других оптических, механических, акустических и тепловых датчиков описаны в WO 93/22678, которая включена в данный текст по ссылке.
d) Блок управления, который соединен с магнитным манипулятором и блоком датчика для определения количества целевого компонента в образце способом описанного выше типа. Это обозначает, что блок управления приспособлен:
(i) выполнять по меньшей мере две стадии отмывания (заставляя магнитный манипулятор воздействовать магнитной силой на магнитные частицы для удаления несвязанных магнитных частиц с контактной поверхности),
(ii) выполнять по меньшей мере две связанные стадии измерения (заставляя блок датчика измерять общее количество магнитных частиц на контактной поверхности в ходе стадии отмывания),
(iii) оценивать количество целевого компонента в образце с помощью вышеуказанных результатов измерений. Блок управления может быть реализован специализированным электронным аппаратным обеспечением, аппаратным обеспечением обработки цифровых данных со связанным с ним программным обеспечением или сочетанием того и другого.
Сенсорное устройство содержит те компоненты, которые необходимы для выполнения способа описанного выше типа. Поэтому за дополнительной информацией о подробностях, преимуществах и усовершенствованиях этого устройства можно обратиться к предшествующему описанию.
Описанный способ будет, как правило, реализовываться с помощью вычислительного устройства, например, микропроцессора или программируемой пользователем вентильной матрицы (ППВМ) в блоке управления вышеуказанного сенсорного устройства. Таким образом, настоящее изобретение дополнительно включает в себя компьютерный программный продукт, который при исполнении на вычислительном устройстве обеспечивает функциональность любого из способов по настоящему изобретению.
Кроме того, настоящее изобретение включает в себя носитель данных, например, гибкий диск, жесткий диск, электрически перепрограммируемое ПЗУ или компакт-диск (CD-ROM), на котором хранится компьютерный продукт в машиночитаемой форме и который исполняет по меньшей мере один из способов по изобретению при исполнении хранящейся на носителе данных программы на вычислительном устройстве. Носитель данных может, в частности, подходить для хранения программы вычислительного устройства, упомянутого в предыдущем абзаце.
В настоящее время такое программное обеспечение часто предлагают для загрузки через интернет или внутреннюю сеть компании, а значит, настоящее изобретение также включает в себя передачу компьютерного продукта по настоящему изобретению по локальной или глобальной сети.
Изобретение дополнительно относится к применению описанного выше микроэлектронного устройства для молекулярной диагностики, анализа биологических образцов или анализа химических образцов, анализа пищевых продуктов и/или судебного анализа. Молекулярную диагностику можно, например, осуществлять с помощью магнитных частиц, которые напрямую или опосредовано прикрепляются к целевым молекулам («мишени»).
Эти и другие аспекты изобретения станут очевидными из и разъяснены со ссылкой на вариант(ы) воплощения, описанный(е) здесь далее. Эти варианты воплощения будут описаны в качестве примера с помощью сопроводительных чертежей, на которых:
Фигуры 1-5 показывают последовательные стадии способа по настоящему изобретению;
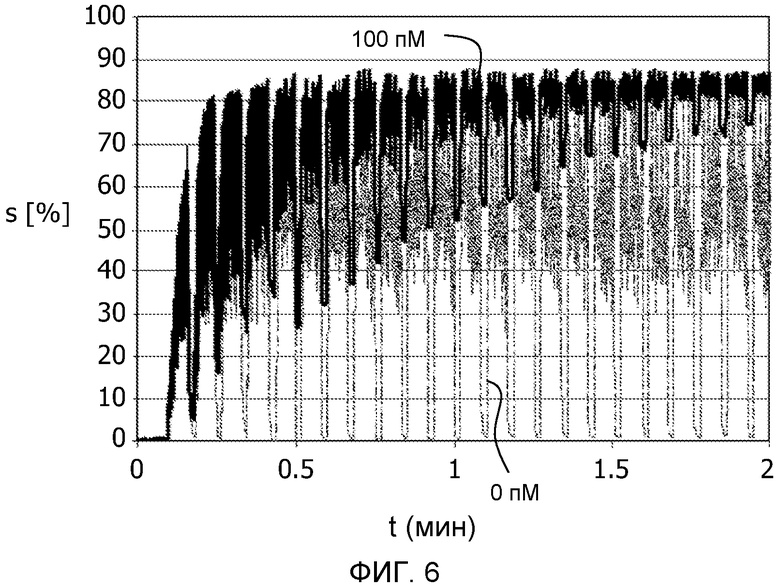
Фигура 6 показывает ход измерения сигналов с течением времени для двух примерных образцов с различными количествами целевого компонента;
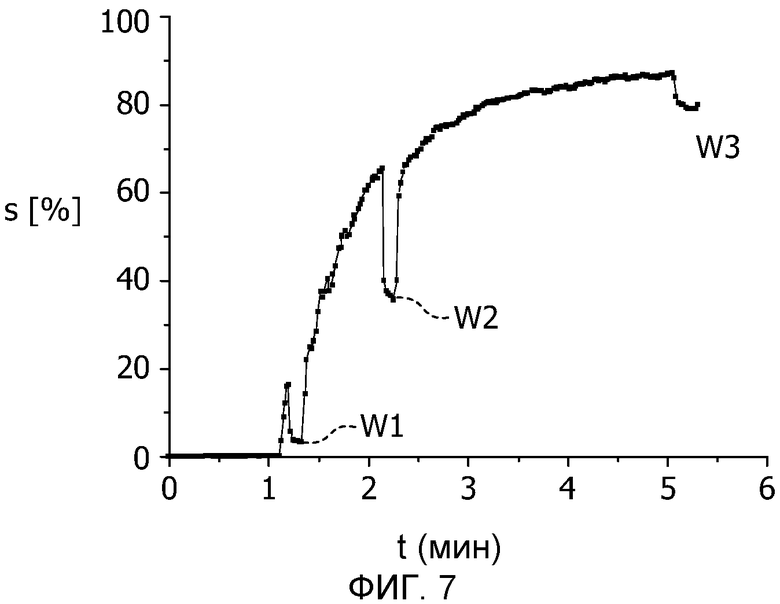
Фигура 7 показывает другой примерный ход измерения сигналов с течением времени с тремя стадиями магнитного отмывания;
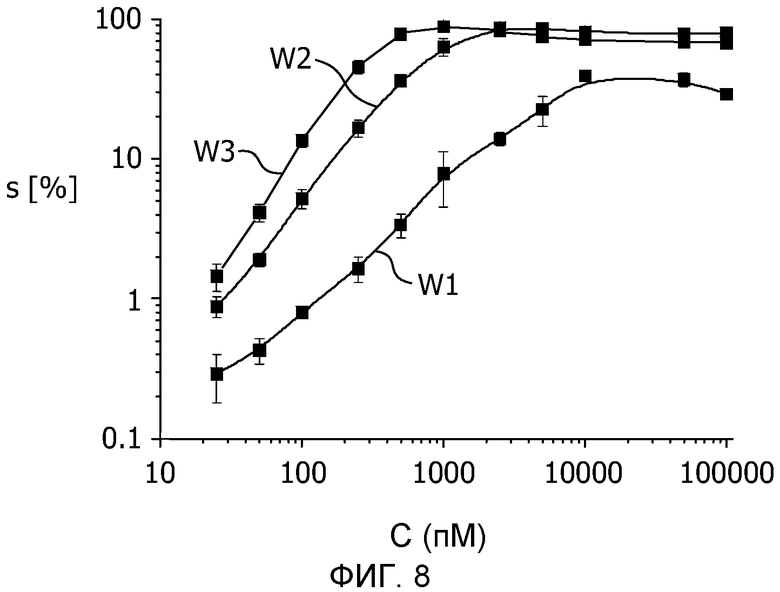
Фигура 8 иллюстрирует экспериментально установленные кривые зависимости доза-отклик, которые описывают соотношение между значениями измерения в ходе стадий отмывания с фигуры 7 и связанным с ними количеством целевого компонента в образце;
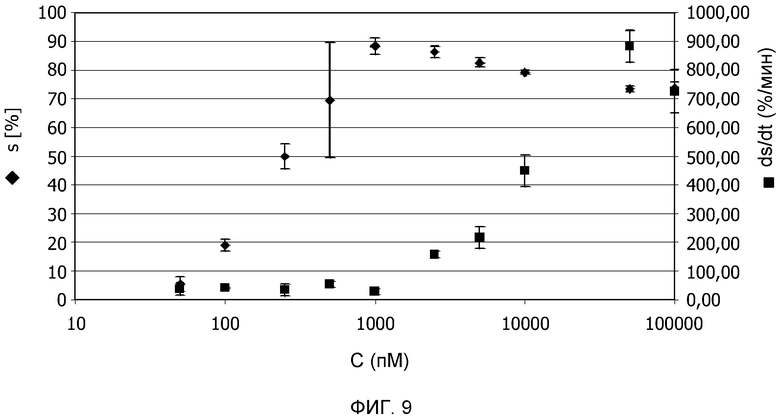
Фигура 9 иллюстрирует различные динамические диапазоны, связанные с измерениями на основе средней точки и с измерениями на основе крутизны.
Одинаковые ссылочные номера на чертежах относятся к одинаковым или похожим компонентам.
При многих биологических анализах желателен широкий динамический диапазон (т.е. диапазон концентраций целевого компонента, которые можно надежно определить). Следующие примеры иллюстрируют решение, как можно расширить динамический диапазон анализов на основе магнитных (нано)частиц.
Магнитные частицы или бусины можно использовать в качестве меток, например, для биологических целевых компонентов (атомов, ионов, биомолекул, клеток, вирусов или фракций клеток или вирусов, тканевого экстракта и т.д.) для достижения быстрой, чувствительной и простой в использовании молекулярной диагностики. Во многих биосенсорных устройствах магнитные частицы связывают с контактной поверхностью сенсорного устройства в присутствие/отсутствие целевого компонента, при этом количество связанных с поверхностью магнитных частиц зависит от концентрации целевого компонента в растворе.
Желательно, чтобы сенсорное устройство позволяло проводить измерения как чувствительно, так и в широком линейном динамическом диапазоне, т.е. в широком диапазоне концентраций, для которого сигнал пропорционален концентрации. Однако часто наблюдают, что динамический диапазон ограничен. Для магнитных частиц более крупных, чем 100 нм, линейный диапазон, как правило, ограничен, например, до примерно 1-2 порядков величины. Динамический диапазон для метода поверхностного обнаружения ограничен следующим:
- наименьшей плотностью магнитных частиц (метки), которая может быть обнаружена;
- наибольшей плотностью магнитных частиц (метки), которая может уместиться на поверхности (полагая, что несколько слоев метки на поверхности не дают линейного увеличения сигнала).
Выгодно использовать более крупные магнитные частицы, поскольку это снижает наименьшую плотность частиц, которая может быть обнаружена; таким образом, однако, также снижается наибольшая плотность в силу пространственного затруднения из-за размера частиц.
В качестве примера, исследование сердечных тропонинов требует чрезвычайно чувствительных измерений порядка 1 пМ, что подразумевает использование больших (диаметром 300-500 нм) магнитных частиц. При этом страдает динамический диапазон, который является узким (2 порядка), поскольку сигнал насыщается при высоких концентрациях. Однако для того чтобы соответствовать клиническим требованиям, необходимо обеспечить возможность измерения по меньшей мере трех разрядов по концентрации.
Один способ расширения динамического диапазона при высоких концентрациях состоит в выполнении нескольких определений при различных разведениях исходного образца. Другой способ состоит во введении образцов в различные моменты времени для изменения времени инкубации (см. WO/2006/092036). Однако эти способы трудоемки, подвержены ошибкам и требуют несколько стадий манипулирования.
Другая проблема, которую следует принимать во внимание, состоит в том, что часто измерения также содержат часть, которая непропорциональна концентрации связанных магнитных частиц, например, неспецифичное связывание частиц с чувствительной поверхностью, или сигнал, полученный из объема текучей среды над поверхностью.
Для решения указанных выше проблем здесь предлагается сочетание измерений кинетики и конечной точки, которая сочетает в себе чувствительность измерений конечной точки с расширенным динамическим диапазоном измерений кинетики. Это можно осуществить посредством способа анализа, в котором используются множественные стадии отмывания. Далее этот способ будет описан более подробно.
В сенсорных устройствах стадии отмывания можно осуществлять посредством (микро)проточного замещения текучей среды образца, содержащей целевой компонент (аналит), над чувствительной областью на другую текучую среду, которая не содержит целевой компонент. Это может быть сложно и трудновыполнимо. Кроме того, зачастую невозможно повторно внести текучую среду образца для возобновления реакции, которая позволяет провести измерение кинетики.
Уникальной особенностью анализов, в которых используются магнитные частицы, является возможность проведения стадии магнитного отмывания. Магнитные частицы, которые находятся рядом с чувствительной поверхностью (и, таким образом, генерирующие сигнал), но не связались, можно просто удалить, используя магнит, который направляет частицы от поверхности. Кроме того, регулируя магнитную силу, частицы, которые связаны слабыми неспецифичными связями, также можно удалить, при этом оставляя специфичные связи нетронутыми. Такая стадия магнитного отмывания может быть очень быстрой и завершаться в пределах секунды. Кроме того, отсутствует необходимость в удалении жидкости образца из камеры для образца/чувствительной области. После стадии отмывания можно определить сигнал, который генерируется специфично связанными частицами, и можно просто возобновить реакцию. Таким образом, количество специфично связанных частиц можно определять несколько раз в одном анализе.
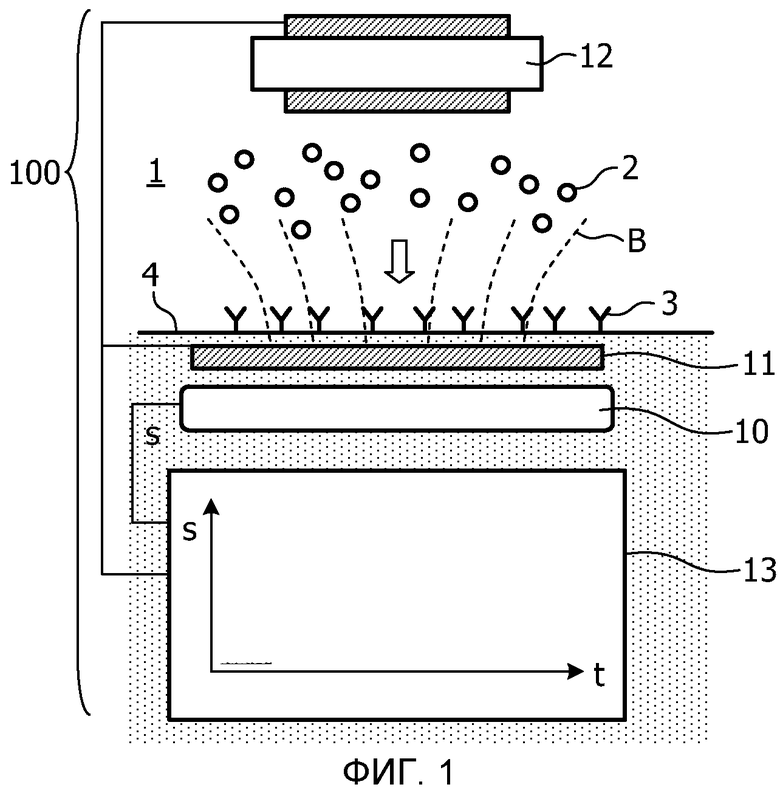
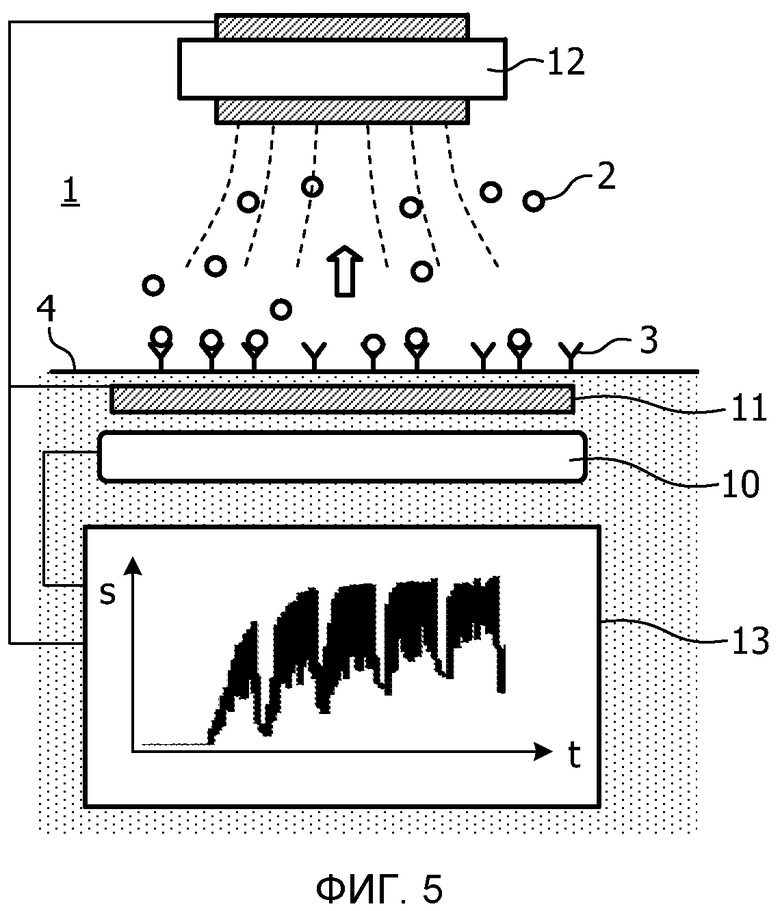
Фигуры с 1 по 5 иллюстрируют изложенную выше идею магнитного сенсорного устройства 100. Магнитное сенсорное устройство 100 содержит камеру 1 для образца, в которой может быть предусмотрен жидкий образец, содержащий целевой компонент и магнитные частицы 2. Снизу камера 1 для образца ограничена контактной поверхностью 4, которая несет участки 3 связывания, с которыми могут специфично связываться магнитные частицы 2. Контактная поверхность 4 может представлять собой поверхность подложки, например, кремниевой подложки, в которую встроены микроэлектронные схемы, или стеклянной подложки в случае оптических измерений. В основном, магнитные частицы 2 используют в качестве меток для некоторого целевого компонента, который представляет интерес в данный момент.Для простоты в дальнейшем будет допускаться, что магнитные частицы 2 в то же время являются целевым компонентом, представляющим интерес. Следует отметить, что в некоторых анализах присутствуют магнитные частицы, которые не могут связываться с контактной поверхностью 4, например, в силу того, что они предварительно не связались с целевой молекулой; в дальнейшем будут определять только количество магнитных частиц в образце, которые могут связываться.
Ниже и выше камеры 1 для образца расположены притягивающий магнит 11 и отталкивающий магнит 12 соответственно. Когда включают притягивающий магнит 11, он генерирует градиент магнитного поля B, который притягивает магнитные частицы 2 к контактной поверхности 4.
Блок 10 магнитного датчика ниже контактной поверхности 4 регистрирует (воспринимает) количество магнитных частиц 2 на контактной поверхности. Этой регистрации можно добиться любыми подходящими средствами, например оптическим или магнитным образом. Блок 13 управления соединен с блоком 10 датчика и с магнитами 11, 12 для управления их работой и для считывания сигналов s датчика. Типичный временной ход сигналов s датчика проиллюстрирован на диаграмме в прямоугольнике блока 13 управления.
Фигура 1 показывает ситуацию, при которой магнитные частицы 2 только что внесли в камеру 1 для образца посредством заполнения последней образцом. Частицы 2 притягивают к контактной поверхности 4 включенным притягивающим магнитом 11. Поскольку на контактной поверхности 4 пока нет магнитных частиц 2, соответствующий сигнал s датчика имеет низкое значение.
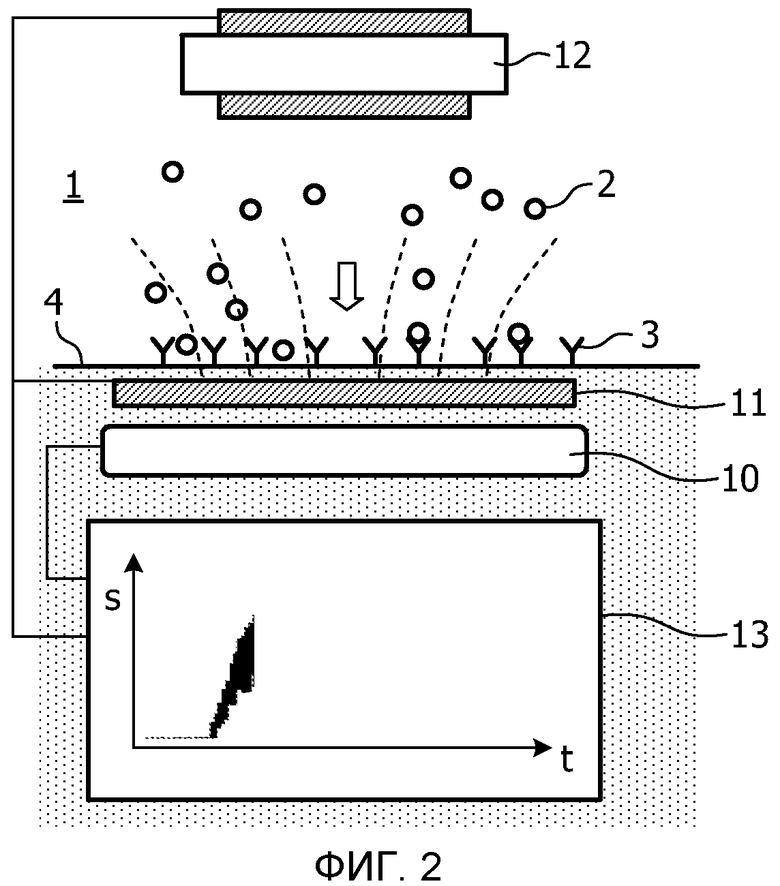
На Фигуре 2 первые магнитные частицы 2 достигли контактной поверхности 4. Сигнал s датчика соответственно усиливается.
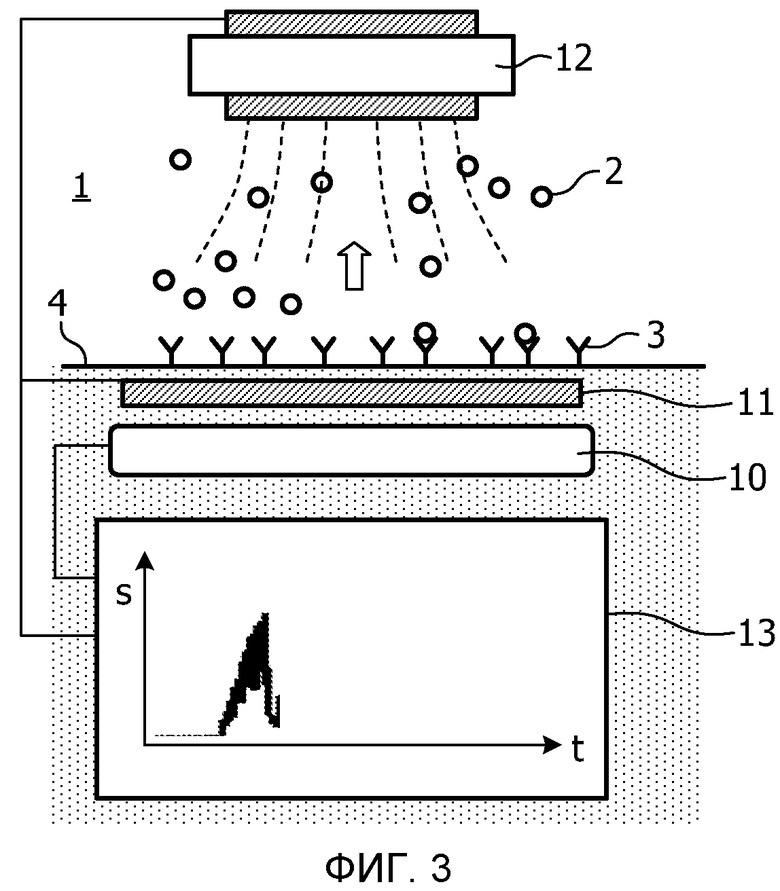
На Фигуре 3 притягивающий магнит 11 был выключен и вместо него включен отталкивающий магнит 12. Он генерирует градиент магнитного поля, который отталкивает магнитные частицы 2 от контактной поверхности 4. Таким образом реализуют стадию отмывания, на которой с контактной поверхности 4 удаляют неспецифично связанные магнитные частицы 2. Как следствие, сигнал s датчика падает до тех пор, пока не достигнет значения, которое соответствует количеству специфично связанных магнитных частиц. На стадии измерения блок 13 управления может проводить замер и сохранять соответствующее измеренное значение, предоставленное датчиком 10.
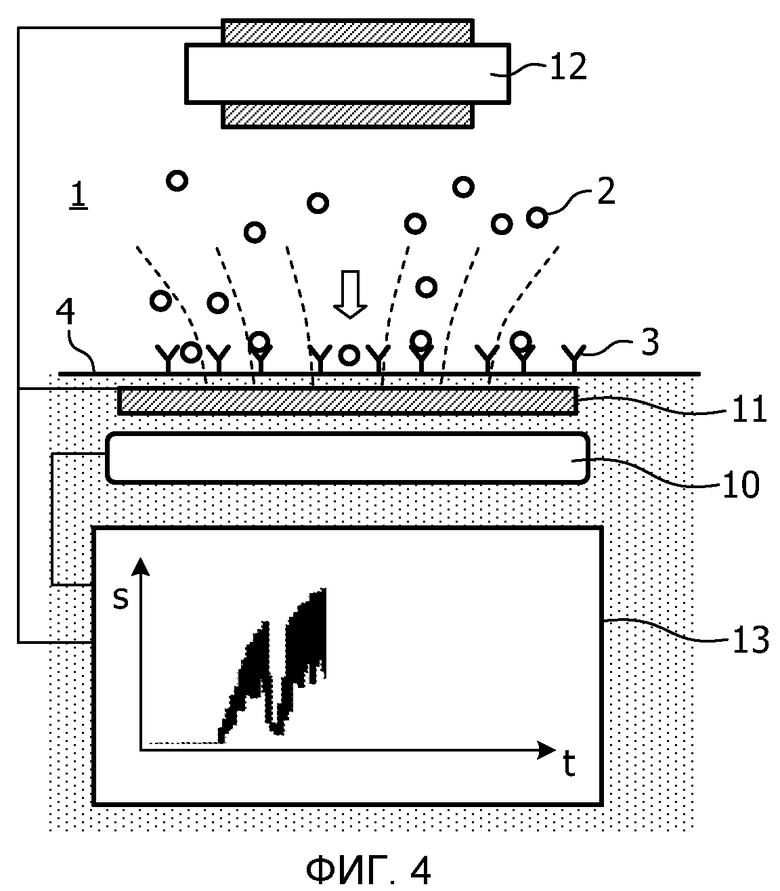
На Фигуре 4 стадия отмывания закончилась и снова был включен притягивающий магнит 11, чтобы притянуть магнитные частицы к контактной поверхности 4. При достижении магнитными частицами 2 контактной поверхности сигнал s датчика соответственно увеличивается.
Фигура 5 показывает ситуацию после нескольких повторений стадий магнитного отмывания и измерения (Фигура 3) и промежуточных стадий притягивания (Фигура 4). В ходе отмывания сигнал s датчика колебательно увеличивался до тех пор, пока он, наконец, не приблизился к уровню установившегося состояния. По одному или нескольким результатам измерений, полученным в конце(ах) стадий отмывания, можно определить количество магнитных частиц в образце внутри камеры 1 для образца. Далее будут более подробно разъяснены различные пути осуществления этого.
В первом варианте воплощения притягивающее действие, которое направлено на обеспечение эффективного связывания меченого магнитными частицами целевого компонента с контактной поверхностью 4, прерывают одной или более стадиями магнитного отмывания, возможно объединенными с отдельной стадией считывания сигнала s датчика. Фигура 6 показывает соответствующую диаграмму с сигналами s датчика для концентрации целевого компонента, равной нулю (серая кривая «0 пМ») и 100 пМ (сплошная черная кривая «100 пМ») соответственно. Здесь сигнал s определяют таким образом, что 0% соответствует контактной поверхности, свободной от магнитных частиц.
В отсутствие целевого компонента, в ходе введенных стадий отмывания сигнал датчика возвращается к 0, поскольку магнитные частицы, не связанные с целевой молекулой, не могут связываться с контактной поверхностью. В присутствии 100 пМ целевого компонента, в ходе стадий отмывания можно наблюдать зависящее от времени изменение сигнала. Из диаграммы ясно видно, что в ходе стадий отмывания удаляют многие несвязанные и неспецифично связанные частицы. Даже в отсутствие целевого компонента контактную поверхность быстро насыщают несвязанные бусины, которые удаляют в ходе стадий отмывания.
На каждой стадии отмывания можно осуществить «измерение средней точки» и установить его корреляцию с (известным) количеством целевого компонента в образце. Таким образом, можно построить кривую зависимости доза-отклик (сигнал в зависимости от концентрации целевого компонента) для каждого из этих «измерений средней точки».
Фигуры 7 и 8 показывают это более подробно для примерного целевого компонента тропонина. На Фигуре 7 представлена кривая измерения для образца с 500 пМ тропонина и для трех стадий отмывания и измерения W1, W2 и W3. На Фигуре 8 показаны соответствующие кривые зависимости доза-отклик, полученные из множества таких измерений для двух измерений средней точки W1, W2 и измерения конечной точки W3 (следует отметить, что термин «измерение средней точки» обозначает измерение в ходе стадии отмывания, за которой следует дальнейшее связывание магнитных частиц, тогда как «измерение конечной точки» представляет собой просто последнее измерение анализа).
Для концентраций целевого компонента, приводящих к медленному развитию сигнала, можно использовать более поздние измерения средней точки. Для концентраций целевого компонента, при которых контактная поверхность 4 быстро насыщается (в ходе стадий отмывания), можно использовать более ранние измерения средней точки. Это ведет к намного более широкому динамическому диапазону анализа.
Во втором варианте воплощения, подобном первому варианту, в ход связывания поверхностью вводят множественные стадии отмывания. Однако вместо использования единственного измерения средней и/или конечной точки для определенного отклика датчика, крутизну изменений сигнала после стадии отмывания в зависимости от времени можно использовать в качестве меры кинетики и, таким образом, количества целевого компонента, присутствующего в образце. Этот способ можно легко объединить с описанным измерением средней/конечной точки. Для концентраций целевого компонента, при которых сигнал насыщается в конце анализа, можно использовать кинетику/крутизну анализа, тогда как для концентраций, при которых датчик не насыщается, можно использовать измерение конечной точки, обеспечивающее как чувствительные измерения, так и широкий динамический диапазон анализа.
Следует отметить, что указанные выше варианты воплощения можно объединять. В этом отношении Фигура 9 показывает пример, в котором в пределах одного анализа использовали как кинетику (т.е. крутизну ds/dt), так и сигнал в конечной точке (s) в качестве двух отдельных измерений для опытных образцов с различными концентрациями C целевого компонента тропонина. Как можно легко заметить, измерения конечной точки (обозначены ромбами и отложены на левой оси) линейно покрывают диапазон более низких концентраций C, тогда как измерения на основе крутизны (обозначены квадратами и отложены на правой оси) покрывают диапазон более высоких концентраций. Таким образом, динамические диапазоны каждого типа измерений полностью различны, что улучшает динамический диапазон всего анализа. Это не ограничено сочетанием измерений кинетики с измерениями конечной точки, но в принципе возможно любое сочетание одного или более измерений кинетики и одного или более измерений средней точки и измерения конечной точки.
Различие, которое используют в измерении для конечного считывания показаний прибора (где определенный сигнал или крутизну следует перевести в неизвестное количество целевого компонента, присутствующего в образце), можно определить автоматически посредством программного обеспечения, запущенного в блоке 13 управления. Например, для экспериментов на Фигуре 9, если измерение конечной точки дает сигнал выше определенного значения, то можно использовать измерение кинетики. Или, наоборот, если крутизна ниже определенного значения, то можно использовать измерение конечной точки. Такой выбор можно предпочтительно делать «онлайн» в ходе начала анализа с неизвестным образцом. Например, если первое измерение кинетики или средней точки показывает высокое значение тропонина, то, значит, анализ можно завершить за одну минуту вместо пяти.
Использование электромагнитных катушек для активации магнитных частиц дает превосходный контроль над манипулированием магнитными частицами. Скоростью, с которой магнитные частицы могут связываться с поверхностью, а значит, той скоростью, с которой развивается сигнал, можно управлять посредством того, как работают магнитные катушки. Другими словами, скорость связывания можно приспособить к конкретным потребностям отдельного анализа. В свою очередь это обозначает, что посредством активации можно настраивать динамический диапазон анализа. Это уместно для измерений конечной точки, средней точки и кинетики. Кроме того, используя различные протоколы активации для различных типов измерений В ПРЕДЕЛАХ ОДНОГО АНАЛИЗА, динамический диапазон каждого из этих типов измерений можно настраивать (полу)независимо. Например, динамические диапазоны двух типов измерений можно подобрать так, чтобы они (немного) перекрывались, приводя к широкому общему динамическому диапазону анализа.
Несмотря на то, что изобретение было описано выше со ссылкой на конкретные варианты воплощения, возможны различные модификации и расширения, например:
- Блок датчика может представлять собой любой подходящий датчик для обнаружения присутствия магнитных частиц на или вблизи чувствительной поверхности на основе любого свойства частиц, например, он может обнаруживать посредством магнитных способов, оптических способов (например, визуализации, флуоресценции, хемилюминесценции, поглощения, рассеивания, методов затухающего поля, поверхностного плазмонного резонанса, рамановских и т.д.), акустического обнаружения (например, поверхностная акустическая волна, объемная акустическая волна, кантилевер, кварцевый кристалл и т.п.), электрического обнаружения (например, проводимость, импеданс, амперометрия, окислительно-восстановительное циклирование), их сочетания и т.д.
- Блок магнитного датчика может представлять собой, например, катушку, магниторезистивный датчик, магниторестриктивный датчик, датчик Холла, плоский датчик Холла, датчик неоднородностей магнитного поля, СКВИД, магнитно-резонансный датчик и т.д.
- Молекулярные мишени часто определяют концентрацию и/или присутствие более крупных составляющих, например клеток, вирусов или фракций клеток или вирусов, тканевого экстракта и т.д.
- В дополнение к молекулярным анализам, сенсорными устройствами по изобретению также можно обнаруживать более крупные составляющие, например, клетки, вирусы или фракции клеток или вирусов, тканевой экстракт и т.д.
- Обнаружение может происходить со сканированием или без сканирования элемента-датчика по отношению к чувствительной поверхности.
- Служащие метками частицы можно обнаруживать напрямую способом регистрации. Также частицы можно дополнительно обработать перед обнаружением. Примером дополнительной обработки является то, что добавляют материалы, или то, что модифицируют (био)химические или физические свойства метки для способствования обнаружению.
- Устройство и способ можно применять при биохимических анализах нескольких типов, например анализе связывания/несвязывания, сэндвич-анализе, анализе конкурентного связывания, анализе замещения, ферментативном анализе и т.д. Это особенно подходит для обнаружения ДНК, поскольку легко возможно крупномасштабное мультиплексирование и можно точечно нанести различные олигонуклеотиды на подложку посредством струйной печати.
- Устройство и способ подходят для мультиплексирования датчиков (т.е. параллельного использования различных датчиков и чувствительных поверхностей), мультиплексирования меток (т.е. параллельного использования меток различных типов) и мультиплексирования камер (т.е. параллельного использования различных реакционных камер).
- Устройство и способ можно применять в качестве быстрых, надежных и простых в использовании биосенсоров диагностики на месте для небольших объемов образца. Реакционная камера может представлять собой одноразовое изделие, используемое с компактным считывателем, содержащим одно или более средств генерации поля и одно или более средств обнаружения. Также устройство, способы и системы по настоящему изобретению можно применять в автоматизированном исследовании с высокой пропускной способностью. В этом случае реакционная камера представляет собой, например, планшет с лунками или кювету, вставляющуюся в автоматический прибор.
- Под наночастицами понимают частицы, имеющие по меньшей мере один размер в диапазоне между 3 нм и 5000 нм, предпочтительно между 10 нм и 3000 нм, более предпочтительно между 50 нм и 1000 нм.
Наконец, следует отметить, что в настоящей заявке термин «содержащий» не исключает других элементов или стадий, что формы единственного числа не исключают множественного числа и что один единственный процессор или другой блок может выполнять функции нескольких средств. Изобретению свойственны каждый и любой новый характерный признак и каждая и любая комбинация характерных признаков. Кроме того, ссылочные обозначения в формуле изобретение не следует рассматривать как ограничивающие ее объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕТЕКТИРОВАНИЕ МОЛЕКУЛ-МИШЕНЕЙ В ПРОБЕ | 2007 |
|
RU2444736C2 |
| ОБНАРУЖЕНИЕ, ИЗМЕРЕНИЕ И ВИЗУАЛИЗАЦИЯ КЛЕТОК, ТАКИХ КАК РАКОВЫЕ, И ДРУГИХ БИОЛОГИЧЕСКИХ ВЕЩЕСТВ С ПОМОЩЬЮ НАЦЕЛЕННЫХ НАНОЧАСТИЦ И ИХ МАГНИТНЫЕ СВОЙСТВА | 2010 |
|
RU2587902C2 |
| БЫСТРЫЙ БИОСЕНСОР СО СЛОЕМ РЕАГЕНТА | 2007 |
|
RU2482495C2 |
| БЫСТРОЕ И ЧУВСТВИТЕЛЬНОЕ ИЗМЕРЕНИЕ БИОИНФОРМАЦИИ | 2006 |
|
RU2415433C2 |
| МИКРОЭЛЕКТРОННОЕ СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЧАСТИЦ-МЕТОК | 2007 |
|
RU2487338C2 |
| СПОСОБ АНАЛИЗА И УСТРОЙСТВА С ПРИМЕНЕНИЕМ МАГНИТНЫХ ЧАСТИЦ | 2010 |
|
RU2595843C2 |
| НОСИТЕЛЬ ДЛЯ ОПТИЧЕСКОГО ДЕТЕКТИРОВАНИЯ В МАЛЫХ ОБЪЕМАХ ОБРАЗЦА | 2009 |
|
RU2502985C2 |
| ВРАЩАЮЩАЯСЯ ПЛАТФОРМА ДЛЯ ПРОВЕДЕНИЯ СЕКВЕНИРОВАНИЯ НУКЛЕИНОВЫХ КИСЛОТ | 2012 |
|
RU2601139C2 |
| ВОЗБУЖДЕНИЕ МАГНИТНЫХ ШАРИКОВ С ИСПОЛЬЗОВАНИЕМ ОБРАТНОЙ СВЯЗИ ДЛЯ БИОСЕНСОРА НА ОСНОВЕ НПВО | 2009 |
|
RU2526198C2 |
| МИКРОЭЛЕКТРОННОЕ СЕНСОРНОЕ УСТРОЙСТВО СЕНСОРА ДЛЯ ДЕТЕКТИРОВАНИЯ ЦЕЛЕВЫХ ЧАСТИЦ | 2008 |
|
RU2489704C2 |
Группа изобретений относится к определению количества целевого компонента в образце, при котором магнитные частицы могут специфично связываться с контактной поверхностью. Представлен способ определения количества целевого компонента в образце, при котором магнитные частицы (2) специфично связываются с контактной поверхностью (4) заполненной образцом камеры (1) для образца с кинетикой, которая зависит от количества целевого компонента в образце, содержащий следующие стадии: a) по меньшей мере две стадии отмывания, на которых воздействуют магнитной силой на магнитные частицы (2) так, что несвязанные магнитные частицы перемещаются от контактной поверхности (4); b) по меньшей мере две стадии измерения, каждая из которых связана с одной из стадий отмывания и на которых общее количество магнитных частиц (2) на контактной поверхности (4) измеряют в ходе стадии отмывания а), при этом хронометраж и/или число последующих стадий отмывания и измерения определяют на основе результатов измерений уже выполненных стадий отмывания и измерения; c) стадию оценки, на которой количество целевого компонента (2) в образце оценивают с помощью по меньшей мере одного из результатов измерений стадий измерения b). Также описаны сенсорное устройство аналогичного назначения, носитель данных с компьютерным программным продуктом для обеспечения возможности осуществления указанного способа и применение вышеуказанного сенсорного устройства для молекулярной диагностики, а также для анализа биологического или химического образца. Достигается повышение надежности определения. 4 н. и 10 з.п. ф-лы., 9 ил.
1. Способ определения количества целевого компонента в образце, при котором магнитные частицы (2) специфично связываются с контактной поверхностью (4) заполненной образцом камеры (1) для образца с кинетикой, которая зависит от количества целевого компонента в образце, содержащий следующие стадии:
a) по меньшей мере две стадии отмывания, на которых воздействуют магнитной силой на магнитные частицы (2) так, что несвязанные магнитные частицы перемещаются от контактной поверхности (4);
b) по меньшей мере две стадии измерения, каждая из которых связана с одной из стадий отмывания и на которых общее количество магнитных частиц (2) на контактной поверхности (4) измеряют в ходе стадии отмывания а),
при этом хронометраж и/или число последующих стадий отмывания и измерения определяют на основе результатов измерений уже выполненных стадий отмывания и измерения;
c) стадию оценки, на которой количество целевого компонента (2) в образце оценивают с помощью по меньшей мере одного из результатов измерений стадий измерения b).
2. Способ по п. 1, характеризующийся тем, что магнитные частицы (2) притягивают к контактной поверхности (4) силой магнитного притяжения до и/или после стадий отмывания.
3. Способ по п. 1, характеризующийся тем, что стадию измерения выполняют в конце стадии отмывания.
4. Способ по п. 1, характеризующийся тем, что оценка основана на изменении результатов измерений.
5. Способ по п. 1, характеризующийся тем, что оценка основана на результате измерения единственной стадии измерения.
6. Способ по п. 1, характеризующийся тем, что, согласно ожидаемому количеству целевого компонента (2) в образце, оценка основана на результате измерения единственной стадии измерения и/или на изменении нескольких результатов измерений.
7. Способ по п. 6, характеризующийся тем, что ожидаемое количество целевого компонента (2) в образце оценивают на основе по меньшей мере одного предыдущего результата измерения.
8. Способ по п. 1, характеризующийся тем, что приблизительно все магнитные частицы (2), которые специфично не связаны, удаляют с контактной поверхности (4) в ходе стадии отмывания.
9. Способ по п. 1, характеризующийся тем, что только долю магнитных частиц (2), которые специфично не связаны, удаляют с контактной поверхности (4) в ходе стадии отмывания.
10. Способ по п. 1, характеризующийся тем, что по меньшей мере одну стадию отмывания и соответствующую ей стадию измерения выполняют после заданной меньшей доли и/или до заданной большей доли ожидаемого общего времени, необходимого для достижения насыщения связываний.
11. Способ по п. 1, характеризующийся тем, что стадия оценки основана на калибровочных данных, полученных с опытными образцами.
12. Сенсорное устройство (100), содержащее
a) камеру (1) для образца, в которой может быть предусмотрен образец, содержащий целевой компонент и магнитные частицы (2), причем камера для образца имеет контактную поверхность (4), на которой могут специфично связываться магнитные частицы (2) с кинетикой, которая зависит от количества целевого компонента в образце;
b) магнитный манипулятор (11, 12) для проведения стадии отмывания путем воздействия магнитной силой на магнитные частицы (2) на контактной поверхности (4) так, что несвязанные магнитные частицы перемещаются от контактной поверхности (4);
c) блок (10) датчика для проведения стадии измерения путем измерения общего количества магнитных частиц (2) на контактной поверхности (4), причем блок датчика способен проводить по меньшей мере две стадии измерения, каждая из которых связана с одной из стадий отмывания b);
d) блок (13) управления, соединенный с магнитным манипулятором (11, 12) и блоком (13) датчика, для определения количества целевого компонента в образце способом по п. 1,
при этом хронометраж и/или число последующих стадий отмывания и измерения определяется на основе результатов измерений уже выполненных стадий отмывания и измерения.
13. Носитель данных, на котором хранится компьютерный программный продукт для обеспечения возможности осуществления способа по п. 1.
14. Применение сенсорного устройства по п. 12 для молекулярной диагностики, анализа биологического образца или анализа химического образца.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СПОСОБ АНАЛИЗА СМЕСИ БИОЛОГИЧЕСКИХ И/ИЛИ ХИМИЧЕСКИХ КОМПОНЕНТОВ С ИСПОЛЬЗОВАНИЕМ МАГНИТНЫХ ЧАСТИЦ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2166751C1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

