Стереоскопическая фотография существует с середины 19-го века и предложены различные решения, касающиеся относительного положения двух фотоаппаратов или двух камер, которые могут быть вставлены в один корпус или размещены на штативах рядом или зеркально.
В 1999 году Заявитель представил впервые в мире цифровую стереоскопическую камеру в IBC (Амстердам), которая, благодаря управлению перемещением, позволяет осуществить мгновенную качественную стереосъемку для обеспечения прямого телевизионного эфира.
Эта первая стереоскопическая камера состояла из двух камер SDI ('Microcam' фирмы Thomson Broadcast Systems) и имела все необходимое оснащение для обеспечения контролируемой стереосъемки с момента киносъемки с помощью устройства визуализации и контроля, позволяющего представлять в режиме реального времени стереоизображение, а также различные параметры изображения и управления перемещением. Эта камера позволила осуществить первую многокамерную съемку с прямой проекцией на большой экран, включающий изменения совокупности параметров стереокиносъемки (межосевое расстояние, обратная величина фокусного расстояния, трансфокатор, цель и диафрагма).
Мировая премьера приема передаваемого стереотелевидения состоялась 1 июля 2000 года в г.Кламси в Ньевре (Франция).
Управляемыми параметрами были следующие: межосевое расстояние между камерами, обратная величина фокусного расстояния камер (то есть угол сходимости оптических осей камер) двух объективов с изменяемым фокусным расстоянием марки Angenieux, регулировки, диафрагмы и трансфокаторы.
Представленные параметры являлись, за исключением механических осей, параметрами управления изображением, исходящими из CCU (Camera Control Unit: блоки расчета камер), при этом две камеры образуют стереоскопическую пару и оптические оси.
Системы стереокиносъемки с N камерами (N превышает или равно 2) в настоящее время используют совокупность компонентов, которые приводят к повышенной механической сложности и к увеличенным габаритам, к недостаткам которых следует добавить повышенную стоимость.
Изобретение предлагает исключить, по меньшей мере, один из этих недостатков благодаря модульной концепции, которая позволяет изготовить стереоскопические камеры из элементов, общих для всех камер: модулей. Эти модули позволяют уменьшить габаритные размеры, объединяя механические и электронные функции и, в частности, систематизировать и упростить управление параметрами стереокиносъемки, будучи встроенными в устройство для стереокиносъемки.
Изобретение относится также к штативному модулю для стереокиносъемки N камерами, отличающегося тем, что он содержит:
- жесткую несущую конструкцию, называемую модульным корпусом, на одной из сторон которого могут группироваться механические и/или электронные элементы,
- подвижную каретку, перемещающуюся в плоскости поступательного движения и имеющую направляющие средства, находящиеся на первой стороне корпуса модуля, а также устройство для привода упомянутой подвижной каретки,
- поворотный штативный элемент камеры, установленный на подвижной каретке и имеющей ось вращения, и направляющий элемент, а также приводной механизм, взаимодействующий с направляющим элементом, для осуществления его перемещения таким образом, чтобы повернуть удерживающий элемент камеры, в частности, на угол поворота максимально в 10°, и в особенности, максимально в 5°, при этом устройство привода перемещения подвижной каретки размещено между приводным механизмом и осью вращения поворотного элемента.
Такая компоновка, при которой управление поворотом поворотного удерживающего элемента камеры отделено и удалено от оси вращения этого элемента, обеспечивает компактность конструкции, что делает возможным выполнение модулей интегральными, включающими все функции стереоскопической киносъемки. Направляющий элемент скользит, предпочтительно, в прорези, выполненной в подвижной каретке.
Подвижная перемещающаяся каретка может скользить по двум направляющим параллельным рельсам, при этом поворотный элемент штатива камеры размещается, по меньшей мере, в пространстве между двумя направляющими рельсами.
Предпочтительно, ось вращения поворотного элемента штатива камеры размещена над первым рельсом.
Приводной механизм предпочтительно размещен снаружи пространства между двумя рельсами, несмотря на то, что направляющий элемент размещен в области поворотного элемента штатива камеры, вне пространства между двумя рельсами.
Привод для перемещения подвижной каретки может быть размещен в пространстве между двумя рельсами.
Предпочтительно, приводной механизм и/или привод являются шариковым винтом или червячной передачей.
Поворотный удерживающий элемент камеры может включать скользящий штатив камеры.
Поворот вокруг оси может быть получен благодаря гибкому элементу, обеспечивающему в одном направлении упомянутое приводное перемещение и имеющему повышенную жесткость в других направлениях.
Максимальный угол поворота поворотного элемента может, по меньшей мере, равен 10°, и, в особенности, 5°.
Модуль может иметь устройство для коррекции устойчивого положения, в частности, по трем точкам, которое встроено в корпус модуля, и которое встроено в корпус модуля и которое содержит три органа управления, размещенных в желобках, выполненных на другой стороне корпуса модуля, противолежащей первой стороне, а также три подвижных элемента, перпендикулярных плоскости перемещения модуля.
Изобретение касается также устройства для стереокиносъемки, отличающегося тем, что оно содержит, по меньшей мере, модуль, такой, как описан выше, и управляющее устройство, предназначенное для выдачи параметров управления подвижной кареткой и поворотным элементом штатива камеры одного или нескольких модулей, а также регулировки одной или нескольких камер, размещенных на одном или нескольких модулях. Устройство может содержать, по меньшей мере, два модуля, таких, как описаны выше. Оно может представлять собой, по меньшей мере, поворотный модуль, имеющий только один поворотный элемент, то есть без подвижной перемещающейся каретки.
Управляющее устройство может, таким образом, иметь:
- первый порядок выполнения операций, называемый уровнем 1, в котором упомянутые параметры уточнены независимо одни от других,
- второй порядок выполнения операций, называемый уровнем 2, в котором, по меньшей мере, один параметр зависит от другого параметра, при этом оба параметра являются, например, углом обратной величины фокусного расстояния и расстоянием регулировки.
Управляющее устройство может представлять третий порядок выполнения операций, называемый уровнем 3, в котором первый параметр зависит от второго параметра, который сам зависит от третьего параметра. Например, первый параметр представляет собой межосевое расстояние между двумя камерами двух модулей, второй параметр является углом обратной величины фокусного расстояния между упомянутыми двумя камерами, а третий параметр является расстоянием регулировки.
Предпочтительно, модули установлены на угловом кронштейне, по меньшей мере, два модуля размещены с обеих сторон полуотражательного зеркала.
По меньшей мере, одна пара симметричных модулей может быть установлена валетом в одном корпусе. Устройство может, таким образом, содержать два упомянутых корпуса, установленных на угловом кронштейне с обеих сторон полуотражательного зеркала с частичным перекрытием осей камер, размещенных в модулях, установленных в соответствующих корпусах.
Изобретение касается также комплекса модулей, таких как описаны выше, отличающегося тем, что он содержит модули различных размеров для камер различного типа, а также тем, что параметры управления модулями не зависят от модуля, так что управляющие сигналы сигнала управления могут использоваться для всех модулей комплекса модулей.
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
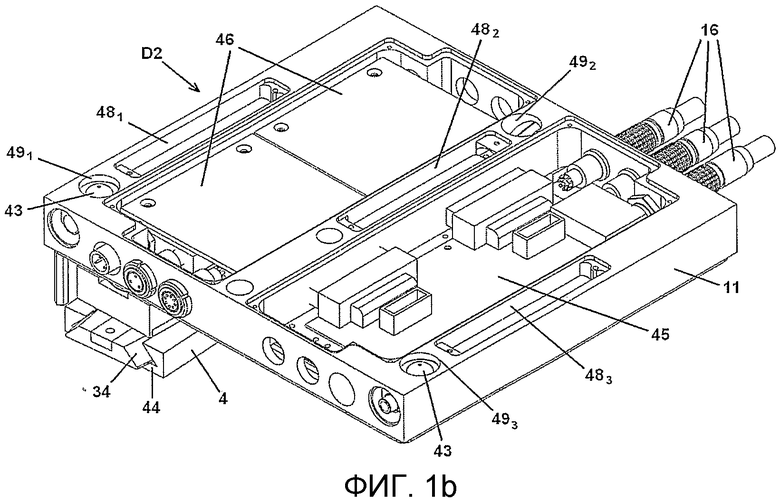
- фиг. 1а-1с изображает предпочтительный вариант воплощения модуля D2 по изобретению, соответственно, в аксонометрии на виде сверху (1а) и виде снизу (1b), и на виде сверху (1с);
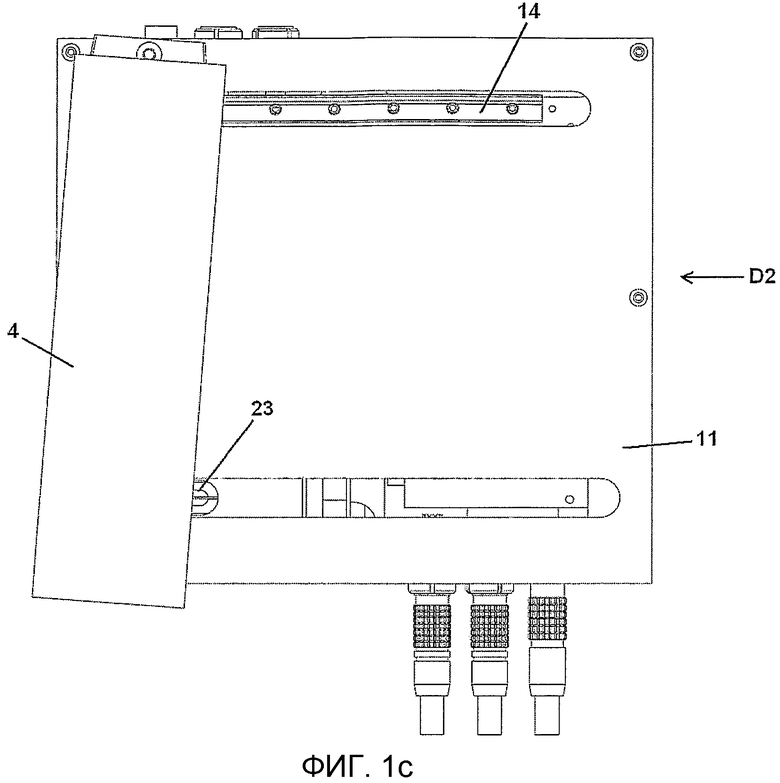
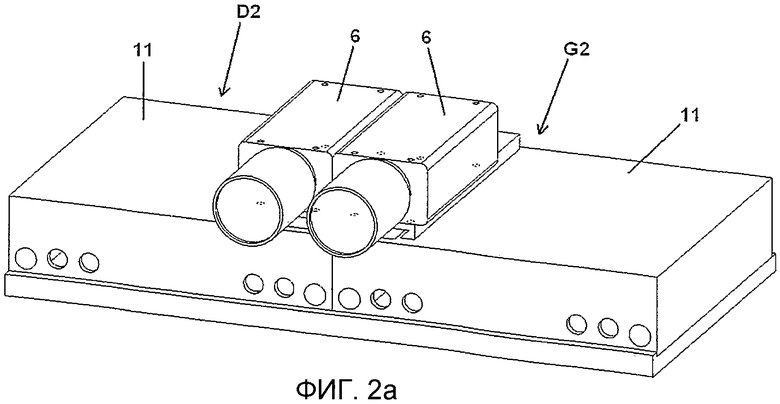
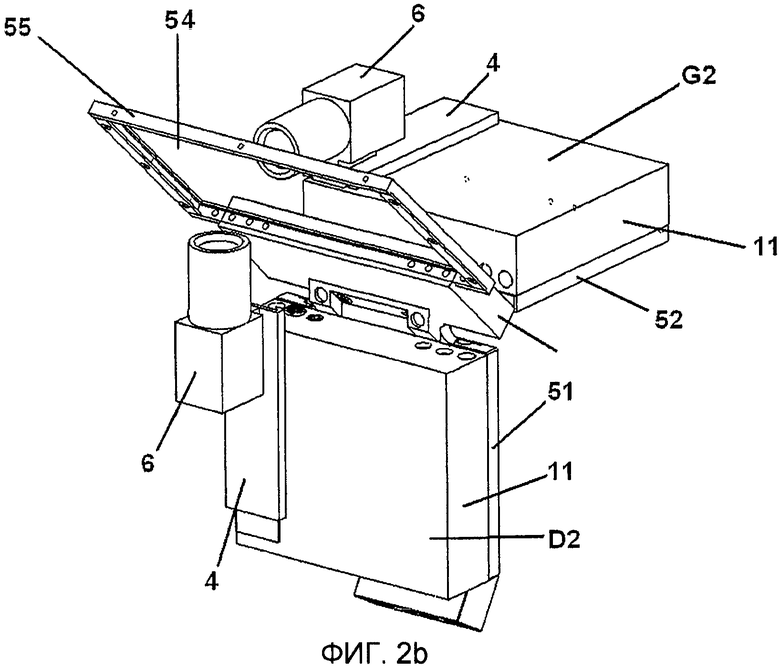
- фиг. 2а и 2b изображают два варианта воплощения стереоскопического устройства с двумя камерами, размещенными рядом (2а) или на угловом кронштейне (2b), с использованием двух модулей D2 и G2 по изобретению;
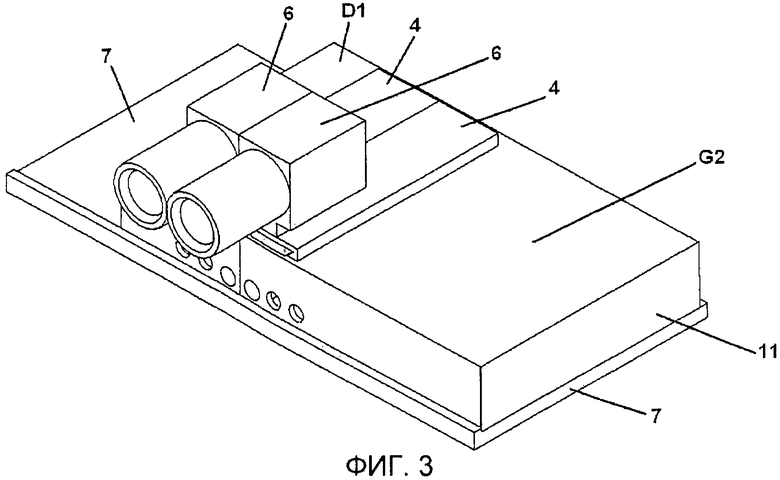
- фиг. 3 изображает стереоскопическое устройство с двумя размещенными рядом камерами, использующее два модуля D1 и G2;
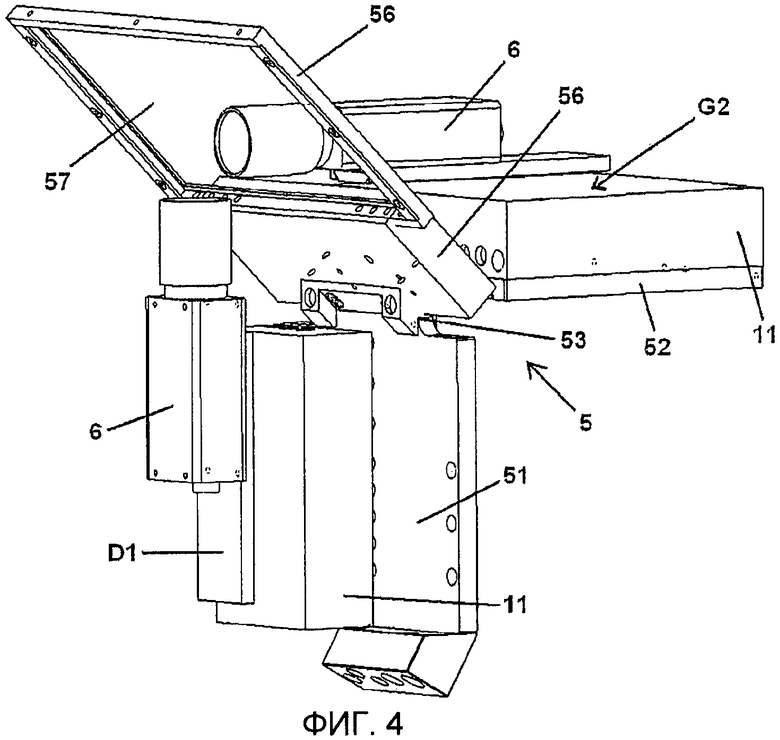
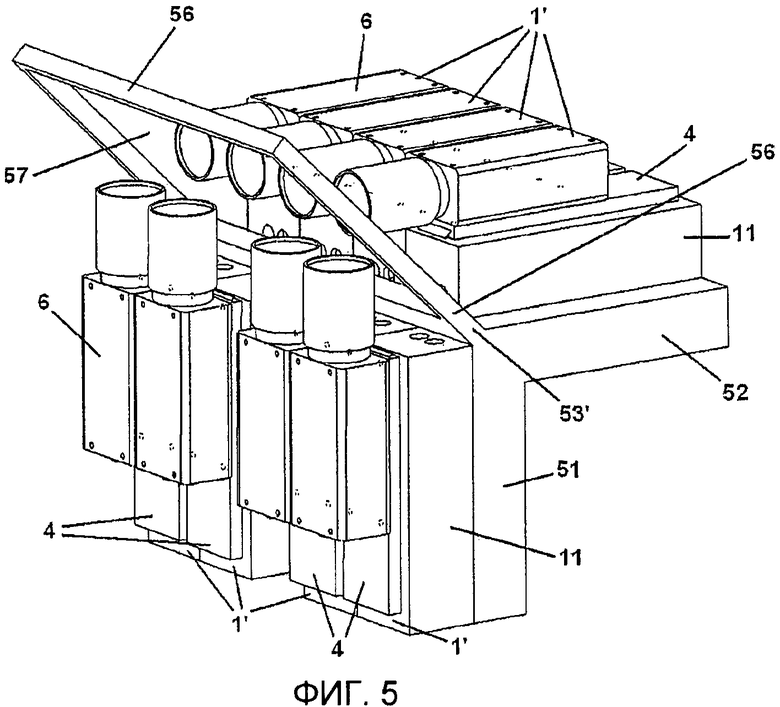
- фиг. 4 и 5 иллюстрируют два примера стереоскопического устройства с двумя камерами (фиг. 4) и с восемью камерами (фиг. 5), снабженными модулями по изобретению с монтажом на угловом кронштейне, называемым зенитным;
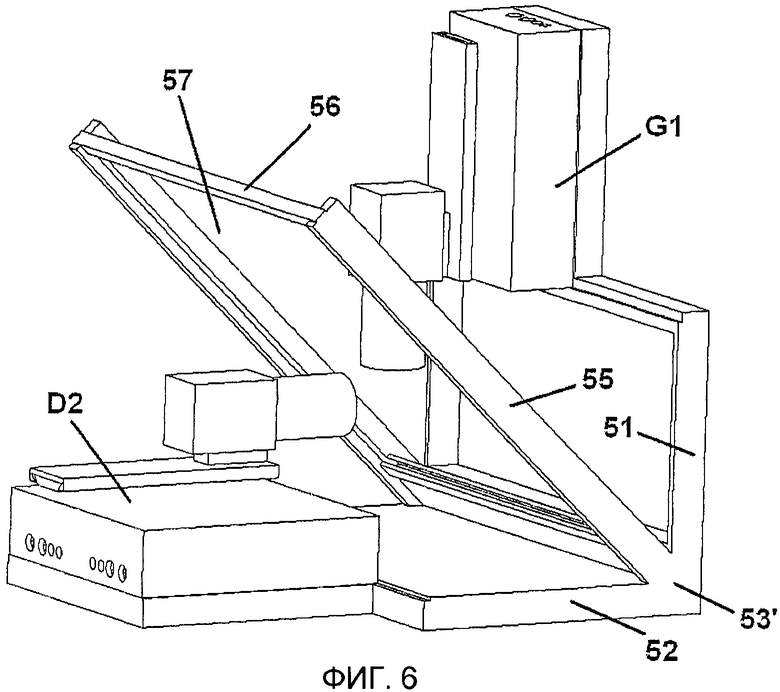
- фиг. 6 изображает монтаж на угловом кронштейне, называемом «крановым» кронштейном для двух модулей D2 и G1;
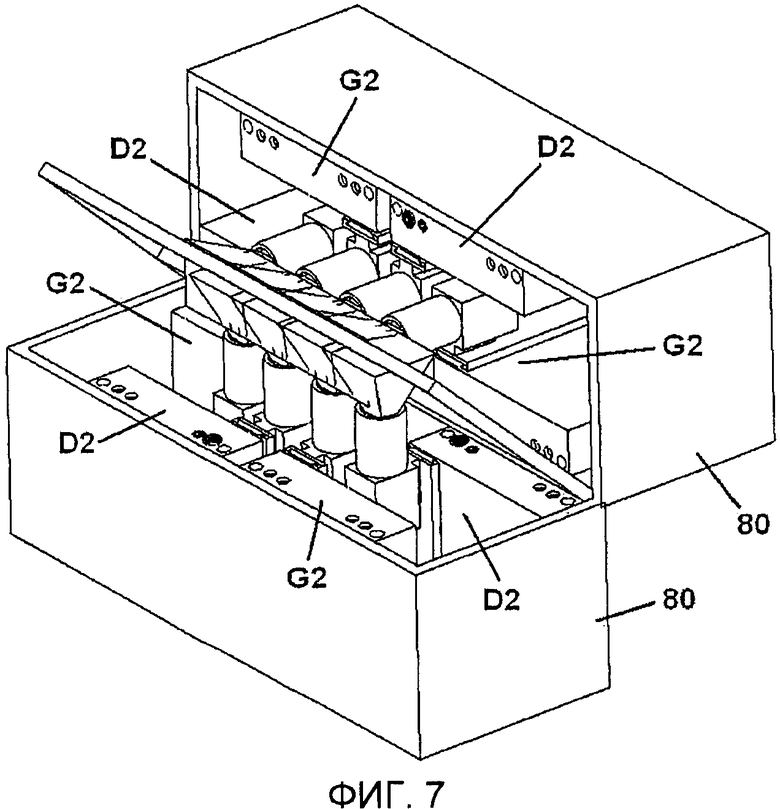
- фиг. 7 изображает соединение валетом двух модулей, правого и левого, в частности, для монтажа на угловом кронштейне;
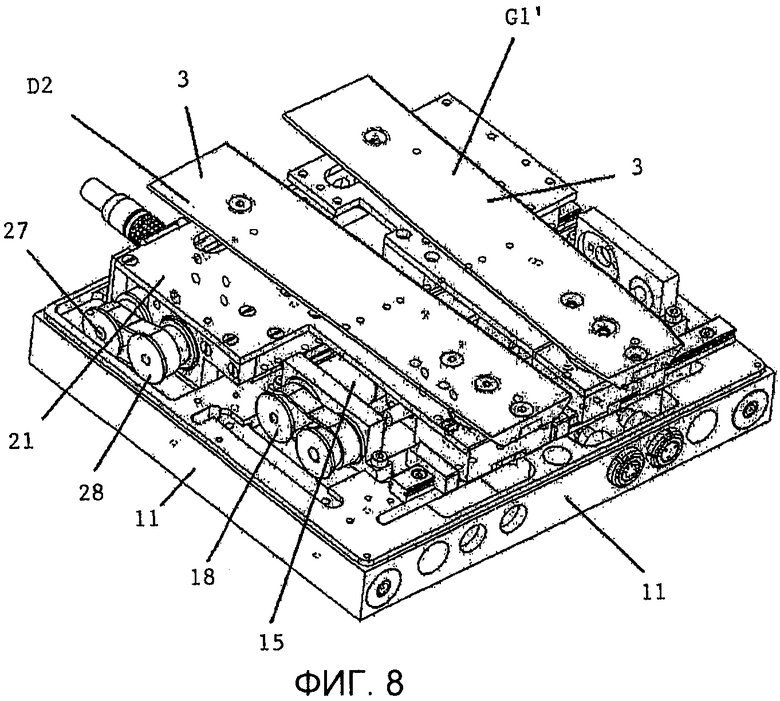
- фиг. 8 изображает сложный модуль, включающий на одной и той же подложке два элементарных модуля, один из которых выполняет функцию перемещения и поворота, а второй выполняет только функцию поворота;
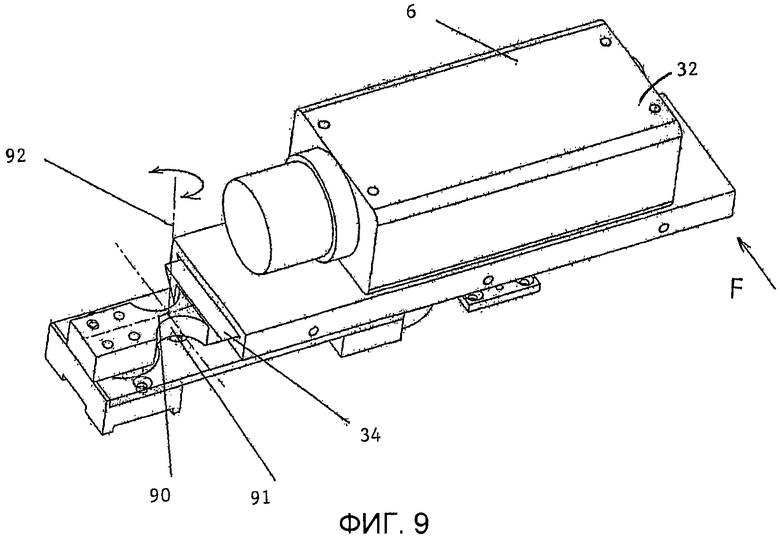
- фиг. 9 изображает средство управления поворотом удерживающего поворотного элемента камеры;
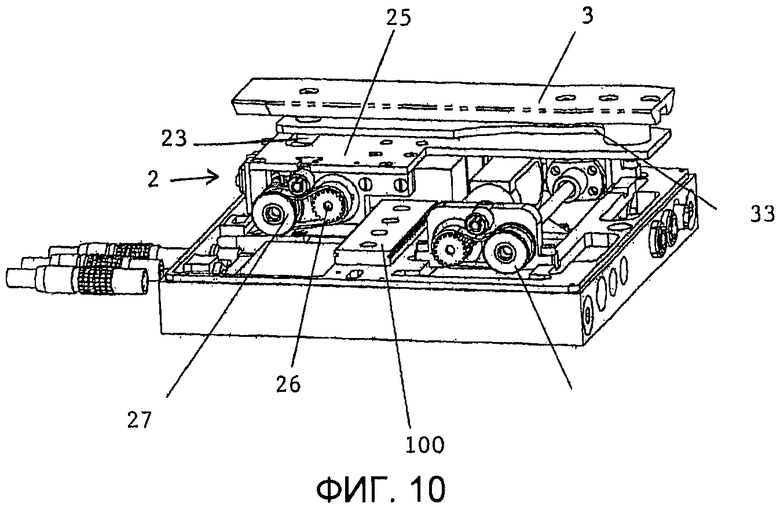
- фиг. 10 изображает вариант с единственным рельсом, а фиг. 2 - предпочтительный вариант установки устройства для киносъемки.
Изобретение относится к реализации и управлению камерами для стереофотографии из N установочных точек (при N, превышающем или равном 2), управляемых сигналами управления ('motion control'), работающих, в частности, при настройке.
Эти камеры удерживаются модулями, могущими иметь различные размеры и идентичные функциональные особенности, размещенными на штативах «бок в бок» или «на кронштейне» для всех конфигураций фотосъемки.
Эти модули и штативы являются сменными идентичного предназначения и могут, предпочтительно, использовать один и тот же язык команд управления независимо от массы, объема и важности используемых вариаций для каждой из систем киносъемки из 2 точек или более (N превышает 2).
Изобретение, в особенности, касается выполнения штативных модулей камер, приспособленных для всех устройств стереокиносъемки из 2 или N точек независимо от стандарта изображения, объема или массы каждой из камер, снимающих из двух или более точек.
Эти модули предназначены для камер различных объемов и масс и могут быть совместимы между собой.
Пример: камеры SD, HD, 2К и 4К от 0 до 5 кг, от 5 до 10 кг и от 10 до 15 кг.
Эти модули являются идентичными и адаптируемыми независимо от устройства, в которое они встраиваются с 2 или N камерами, и являются симметричными. Правые и левые модули для кранового варианта, наплечная камера, камера для съемки сверху 'Steadycam' и т.д. являются, предпочтительно, реверсивными и содержат те же механические и электронные компоненты и те же уровни управления и фиксации позиционирования, отмеченные командой движения ('motion control').
Эти модули являются независимыми один от другого, но могут выполнять дополнительные функции.
Пример: один трехуровневый генератор достаточен для комплекса устройства из 2 или N камер. Он, таким образом, синхронизирует камеры, используя устройство управления перемещениями.
с) эти модули могут включать большое число элементов, при этом, по меньшей мере, один выбран из следующего списка:
- все механические, электронные, информационные возможности системы (для поддержки модулями основного модуля на стороне устройства управления перемещениями может использоваться переносная миниЭВМ), связанные с обратной величиной фокусного расстояния, межосевым расстоянием и коррекциями по высоте, повороту и наклону, обеспечивающими перекрытие оптических осей;
- электроника трансфокаторов, регулировки и диафрагмы;
- моторедукторы - шифраторы параметров обратной величины фокусного расстояния, межосевого расстояния и коррекции высоты;
- детекторы окончания перемещений;
- карты распределения и межкоммуникации, глубины корзины;
- карты управления и мощности приводов;
- генераторы сигналов синхронизации на 1, 2 и 3 уровнях;
- элементы измерений и фиксации временных положений: временной код, часы всемирного и космического времени: типа буссоли, GPS, альтиметра, уклономера, телеметрического лазера и т.д.;
- системы управления и передачи по кабелю или радио ('Wi-fi', 'bluetooth');
- информационная система записи данных (флэш-память, жесткий диск, ключ USB...);
- приемный микрофон для «клика» или электронного клика в 1000 Гц, записанного с данными управлений перемещением;
- ВЧ приемник временного кода (ТС), передаваемого генератором ТС;
- вычислительное устройство для команд и приема комплекса данных;
- связь, позволяющая осуществить переключение и передачу всех электрических и управляющих сигналов для обеспечения работоспособности, коммутируемости и соединения между ними, например, с помощью сети (например: RS 485, USB, Эзернет) независимо от вида соединения и независимо от вида оператора: стереограф, кадрирующее устройство или вспомогательная камера могут воздействовать на различные команды для упрощения распределения задач. Эти задачи являются комплементарными, иерархизируемыми и коммутируемыми.
Модули являются взаимозаменяемыми и, в случае неисправности, можно заменить модуль при сохранении сохраненного в микроконтроллере или флэш-памяти архива данных (фиксирование положений) предыдущих регулировок.
Модули являются универсальными: все правые модули взаимодействуют с левыми модулями:
1. D2: правый модуль поворотного перемещения
2. G2: левый модуль поворотного перемещения, симметричный правому модулю D2
3. D1 и G1: соответственно правый и левый модули поворотного перемещения.
D1' и G1' облегченный правый или левый модуль поворотного перемещения (совместимый с D2/G2) (то есть без управления коррекцией устойчивого положения, за исключением ручной регулировки) для съемки сверху, с вертолета. Особенностью этих модулей является их размещение непосредственно в модуле D2/G2 для обеспечения внутри модуля второго поворота для значительного уменьшения объема комплекса (см.фиг.8).
Все эти модули являются элементами, образующими камеры с N позиций съемки.
Модули выполнены c коэффициентом пропорциональности, но имеют, предпочтительно, объемы, идентичные и сравнимые для использования системы передачи и общего отображения и могущие быть использованными во всех комбинациях.
Модули организованы следующим образом:
А) Объединение поворота и перемещения в одном механическом корпусе.
Модули, объединяющие поворот и перемещение, являются едиными, что обеспечивает значительный выигрыш места. Они являются симметричными для того, чтобы одинаковые детали независимо образовывали левый или правый модуль.
В) Все эти корпуса содержат механические, электронные и программные средства управления командой движения и стереоскопией, если встроена миниЭВМ.
С) Поворот на 360° обеспечивается системой типа шарикового, игольчатого или роликового подшипника. Однако для стереоскопической киносъемки его поворот ограничен малым углом, в частности, меньшим 10°, и, в особенности, меньшим 5° на модуль.
Эти устройства могут быть также использованы для многокамерных панорамных съемок на 360°, при этом дополнительные камеры независимо от их числа могут сами поворачиваться на углы, доходящие до 90° и больше, для захвата краев поля.
D) ограниченное вращение может быть обеспечено системой бесповоротных элементов для исключения проблем с зазорами (продольный наклон и отсутствие жесткости), если хотят минимизировать отсутствие точности, особенно, в случае киносъемки через зеркало.
Этот поворот обеспечивается гибким соединением, имеющим единственную возможность перемещения по оси 92 и значительную жесткость в другом направлении для того, чтобы исключить вертикальные угловые и торсионные вариации. Фиг. 9 изображает вариант воплощения в виде металлической полосы 90, например, из закаленной стали, выполненной с сужающейся областью 91, в данном случае, в виде кольцевого арочного профиля. Поворот управляется элементом 32 в направлении стрелки F. Поворот осуществляется вследствие эластичности металла линейно и без зазора. Толщина полосы, которая значительно превышает область сужения 91, обеспечивает повышенную жесткость в других направлениях, нежели в направлении стрелки F, используемом для обратной величины фокусного расстояния камер.
Этот амплитудный поворот в 5 или 10° для стереосъемки из N точек производится линейным перемещением (шариковый винт) или поворотом (червячная передача) таким образом, чтобы он был однородным между системами, удерживающими камеры различного размера и массы.
Е) В случае привода шариковым винтом большой точности ограничивают зазоры при вращении, когда камера, колеблющаяся вокруг оптической оси, имеет возможность перемещения или деформации в зависимости от изменений давления, вызванных, например, инерцией или вибрациями в процессе съемки в перемещающейся машине, вертолете или любом испытывающем вибрацию транспортном средстве, а также в случае «раскачивания» (движение поворота вокруг оптической оси), которое вызывает значительное изменение влияния силы тяжести на механические соединения.
Независимо от размеров модулей, осуществляющих перемещения и повороты, кодирующий масштаб перемещений перемещающей команды является, предпочтительно, подобным для устройств удерживающих штативов камер различных масс и размеров.
F) Более того, независимо от этих вариаций размеров и масс величина углового поворота, предпочтительно, связана с идентичным числом естественных шагов без вмешательства, кроме как выбора угла поворота.
Таким образом, все камеры связаны командным кодом перемещения, который может быть единым независимо от их объемов и их масс, то есть логическая система и механические шаги, позволяющие обеспечивать поворот или перемещение камеры весом в 200 г и 10 кг, являются строго сравнимыми в направлении или той же самой команде, производящей тот же самый эффект.
Это достигается спариванием комплекса моторедукторов и промежуточных механизмов, сохраняющих одинаковые коэффициенты независимо от пар и мощностей, необходимых для комплексов моторедукторов всех устройств.
Так как эти комплексы имеют одинаковые коэффициенты редукции на всех уровнях независимо от локализации команд и их эргономика позволяет осуществлять его поворот или перемещение, то Х кодирующих шагов соответствует одному и тому же перемещению или одному и тому же повороту.
Такое устройство предназначено для обеспечения совместимости различных процессов изготовления в стереоскопической цепочке, виртуальной или реальной, в соответствии со сценарием, затем съемки и последующего производства до распространения, независимо от реального или виртуального оборудования, совместимого с этой системой передачи данных.
Фиг. 1а-1с изображают пример модуля D2, содержащего основную плату или корпус 11, верхняя поверхность которой снабжена направляющими рельсами 12 и 14, которые направляют перемещение каретки 2, на которой установлен штатив камеры 3. Между рельсами 12 и 14 расположено устройство, которое управляет перемещением каретки 2. Шаговый двигатель 15 постоянного тока или бесщеточный приводит через передачу 18 шариковый винт 19 или червяк. Каретка 2 может также перемещаться по всей ширине пластины 1 для регулирования расстояния между камерами и, таким образом, стереоскопической базы между двумя камерами, изображения которых образуют стереоскопическую базу. Наиболее широкий модуль, изображенный позицией D2 (или G2), соответствует случаю системы с 2 камерами, которому необходима изменяемая в широких пределах стереоскопическая база с возможностью изменения двух перемещений одновременно. Для систем с N точками съемки (N превышает 2) могут быть использованы более узкие модули. Модули, называемые D1 и G1, обеспечивают только поворот одним и тем же механизмом, что и для модулей D2 и G2, а не перемещение (изменение межосевого расстояния между оптическими осями камер), который в этом отдельном случае будет предпочтительно размещен на уровне штативов различных модулей.
Модуль D2 или G2 содержит также на корпусе 11 соединители 16, 17 для электронных карт, которые могут быть размещены в полостях (в данном случае в количестве 2) корпуса 11 (фиг. 1b).
Каретка 2 вблизи передней поверхности модуля имеет отверстие 22 для приема оси 33 поворота штатива камеры 3, который размещен вблизи одного из своих концов и, в особенности, в примере, изображенном над рельсом 14. На другом конце штатив камеры 3 содержит палец 32, скользящий в щели 23 для направления поворота штатива 3. Этот поворот позволяет регулировать угол обратной величины фокусного расстояния. Перемещение пальца 32 по траектории большой кривой управляется движением перемещения, производимым шариковым винтом или червяком 27, приводимым шариковым двигателем и передаваемым передачей 28. Устройство, состоящее из двигателя, передачи и винта 27, 28, размещено на внутренней части продолжения 25 каретки 2, размещенной снаружи интервала между рельсами 12 и 14, в котором размещен механизм 15, 18, 19 перемещения каретки 2.
Такая компоновка позволяет получить большую точность при движениях перемещения каретки 2 (которая определяет стереоскопическую базу) и поворота штатива 3 (которая определяет обратную величину фокусного образования) при обеспечении хорошей компактности.
Интерпретация комплексов перемещения и поворота позволяет обеспечить значительный выигрыш места по сравнению с монтажом в системах известной в настоящее время профессиональной стереоскопической киносъемки, которые только добавляют существующие системы перемещения и поворота, предназначенные для перемещения на 360°, но, напротив, распределить функции с обеих сторон рельсов 12 и 14 для перемещения и позволяет обеспечить заметный выигрыш места при значительном повышении точности поворота. В частности, радиус поворота штатива 3 является значительно большим при такой компоновке при обеспечении малых габаритных размеров.
Карты «дна корзины», размещенные в полости 45 и питающие одновременно карты 46 управления перемещением и поворотом и карты синхронизации камер, обеспечивают также выигрыш в габаритах, располагаясь между желобками 481-483, предназначенными для коррекции устойчивых положений и оптических выравниваний.
Комплекс этих карт может также содержаться в одном корпусе, образующем управляющий модуль, что позволяет также управлять всеми параметрами без добавления габаритных элементов.
Карты управления «3 уровень», миниЭВМ или любые другие карты могут быть расположены случайным образом в том или другом из модулей системы съемки из N точек (N превышает или равно 2).
Примечательно, что модули типа D1 или G1, обеспечивающие только поворот, могут, при необходимости, быть установлены на плате 11 для модулей D2 и G2, обеспечивая значительное необходимое пространство хранения для всех описанных выше систем управления, GPS и т.д.
Механические комплексы оптического выравнивания камер, включающих датчик и оптический штатив, когерентны для 2D, но не для стереокиносъемки (3D). Таким образом, речь идет о коррекции с помощью трехточечной системы устойчивого положения и угла, образованного на их пересечениях углами киносъемки, для максимального уменьшения вертикальных несогласованностей и устойчивого положения камер.
Этот аспект является важным для выравнивания оптических осей различных камер в случае стереоскопической киносъемки с двух, а также с N точек.
Подъемники, которые регулируют высоту каждой из треног перпендикулярно в плоскости перемещения модулей, действуют следующим образом. В трех желобках 481-483, размещенных в центре и по бокам корпуса модулей, расположены (не представленные на чертеже) кодирующие редукторы, осью которых является винт, который воздействует на коническую деталь. Эта деталь служит для направления движения, и, воздействуя на подвижный элемент, например, на полусферическую головку 43, являющуюся подъемником и перемещающуюся в соответствующем направляющем месте 491-493, поднимает модуль вверх. Эти три подвижных элемента упираются в три точки штатива модуля, которые служат для установки рядом или на угловом кронштейне, при этом эластичная фиксация обеспечивает возвратную силу, которая обеспечивает их функцию подъема.
Регулировка по трем точкам, например, с амплитудой регулировки в несколько миллиметров (обычно 3 мм), позволяет в очень короткое время отрегулировать все проблемы оптического выравнивания или устойчивого положения и, воздействуя на команду перемещения, воспроизвести эту коррекцию для перемещения, например, трансфокатора.
Модули D1, D2, G1 и G2 могут получать и распределять токи питания управлением и изображений.
Для камер соединения и их проводники встроены в штативы модулей, если они расположены на угловом кронштейне (фиг. 4 и 5) или рядно (фиг. 2а и 3).
1) Вариант распределения токов, позволяющий обеспечить смену модулей без использования формирования команд для различных модулей.
Управление осуществляется по шине RS 485 или другой шине данных, положение модулей изменено, но они также связаны. Их положения в иерархии операций остается решающим в любой момент. Именно эта особенность модулей позволяет обеспечить организацию иерархий функций и команд по запросу.
2) Общее управление командой перемещения (в частности, путем регулировки), управляющей N модулями N камер.
Команда перемещения может выдаваться устройствами управления, которые могут быть управляемы вблизи камеры оператором, вблизи или на расстоянии ассистентом оператора, связанным с камерой кабелем, 'Blutooth', 'Wifi' или другой радиосистемой и стереографией, главным оператором или режиссером с места работы и контроля за стереосъемкой N камер.
Дополнение команд и иерархия этих команд, имеющих, с одной стороны, приоритет, и, с другой стороны, обратную связь совокупности функций команд перемещения одних относительно других, распределяется как угодно в зависимости от того, что только оператор может один совершать операции, или он имеет одного или нескольких ассистентов, или он разделяет решения о технических постановках стереографических сцен с режиссером или главным оператором фильма.
Иерархия связана не только с функциями, но и с различными командами, которые организуются в соответствии с выбором различных команд. В этом плане описанная модульная концепция обеспечивает большую гибкость, как с точки зрения материала, так и с точки зрения управления командами.
Речь идет о киносъемке, обеспечивающей постановку сцены и параметры стереоскопичности в соответствии с желанием создания визуального комфорта зрителю.
Например:
Можно решить, что регулировка увязывает обратную величину фокусного расстояния (то есть угол обратной величины фокусного расстояния), или, наоборот, обратная величина фокусного расстояния увязывает регулировку в соответствии с результатами человеческих наблюдений.
Если угол обратной величины фокусного расстояния был определен режиссером как ограниченный до максимальной угловой величины, тогда обратная величина фокусного расстояния не будет изменяться при достижении этого значения. Напротив, можно рассматривать, что, когда этот угол будет достигнут, он будет поддерживаться с помощью изменения межосевого расстояния посредством алгоритма для сохранения определенного угла.
Назовем иерархию, организацию различных функций одних относительно других:
Когда все команды являются независимыми одни от других, будем говорить, что мы имеем иерархию уровня 1: один или несколько операторов уточняют различные параметры управления перемещением или камерой независимо одни от других.
Когда один параметр увязывается с другим, он называется уровнем 2 (например, разработка обратной величины фокусного расстояния или доводка обратной величины фокусного расстояния).
Когда одна ось согласована с другой, она сама связана с первой командой: она имеет уровень 3. Это случай межосевого расстояния, подчиняющийся углу обратной величины фокусного расстояния, который должен сам регулировку без изменения угла обратной величины фокусного расстояния. Получаемым эффектом является удержание в плоскости экрана сюжета без внезапного появления или отступление вглубь кадра.
Различные иерархические системы могут существовать в условиях, когда имеет место фиксация положений картинка/картинка.
Фракционирование команд может осуществляться в различных иерархиях. Например, межосевое расстояние подчиняется обратной величине фокусного расстояния, которое доводит его для получения постоянной эскпозиции, связанной с эффектом изменения скорости при стереокиносъемке с N точек, картинки в которых попарно образуют стереоскопические пары. Кинокамеры уже обладают этими функциями и являются, таким образом, автономными для этих функций при 2D, но данные следует сохранять и затем передавать их на различные этапы изготовления фильмов. Данные связаны с каждым изображением, изменение скорости в процессе киносъемки должно фигурировать в фиксации данных.
Ось системы киносъемки может также отслеживать оси различных камер в системе с N точками съемками, но также в N системах с N точками съемки.
Если рассматривают киносъемку с N точками съемки, регулировка основной камеры может управлять регулировкой совокупности регулировок, но она может также подчинить совокупность обратных величин фокусного расстояния, которые должны, таким образом, совпадать.
Восемь расположенных рядом или через зеркало камер (фиг. 5) сходятся в одной плоскости доводки с различными угловыми величинами, превышающими угол двух камер, размещенных в центре. Они будут, таким образом, зависеть две по две одни от других, но должны будут совпадать в той же точке, что и совокупность основной пары и других пар.
В случае непарного количества камер, например 9, камера, расположенная в центре устройства, будет управлять совокупностью пар, распределенных с ее левой стороны и ее правой стороны. Обратная величина фокусного расстояния камер будет находиться на точке ее оптической оси, которая сама перпендикулярна комплексу устройства.
Несколько устройств могут быть также подчинены одному из них.
Иерархия может зависеть от параметров, связанных с соотношением яркостей стереоскопии, например, неодинаковостью числа пикселей или миллиметров на отдельном экране, в зависимости от размера предназначенного экрана, могут быть также быть включены в иерархию. В этом случае оператор предупреждает переполнение, предполагаемую неодинаковость посредством визуальной или звуковой системы, встроенной в устройство контроля и коммуникации различных специалистов.
3) Команда перемещения может не только управлять параметрами оптических осей в реальном времени, но может «вновь совершить» изменения этих осей в различной киносъемке. Способность восстановить определенные параметры сцены путем использования новых параметров или приспособления к различным степеням иерархий некоторых их значений позволяет осуществить очень сложные киносъемки, для которых формируют каждую ось или каждую группу осей одну за другой, освоить киносъемку разнородных планов, а также производить киносъемку планов или различных последовательностей при сохранении тех же параметров в процессе съемки фильма.
4) Если производят киносъемку разнородного плана, следует сохранить определенные параметры, записанные в процессе других киносъемок при сохранении возможности воздействия на некоторые из параметров управления перемещением.
- Если, например, снимают фильм на фоне покрытия, можно автоматически воспроизвести изменения параметров, используемых в процессе первой киносъемки той же комедии. Но доработка или любой другой параметр может быть обработан различно в зависимости от постановки мизансцены.
- Другой пример: персонажи различных фантомных изображений могут появляться в ходе всего фильма, но параметры первой киносъемки или предыдущих киносъемок будут передавать команды в процессе киносъемки.
5) Модули могут содержать соединения 34 в виде ласточкина хвоста, который служит для удержания направляющей 4 камеры, снабженной дополнительным профилем 44. Эта направляющая 4, на которой установлена камера 6, позволяет в соответствии с оптическим устройством размещать узловую точку объекта на оси поворота при макетной киносъемке или размещать переднюю плоскость перед объективом против зеркала 57 (в случае такого монтажа, как изображен, например, на фиг. 4, 5) для ограничения поля необходимого покрытия зеркалом 57.
Размеры ласточкиных хвостов 34, 44 определяются камерами, которые они удерживают. Рассмотрим модели изготовителей, стараясь максимально ограничить габаритные размеры в связи с существующей тенденцией использования более легких цифровых камер.
П) Штативы модулей.
а. Штативы, как модули, являются универсальными и сравнимыми. Они имеют различные размеры, но обладают теми же функциональными возможностями независимо от устанавливаемых на них модулях.
b. Универсальность штативов:
Модули могут быть независимо установлены на угловом кронштейне (фиг. 2b, и 4-6) или рядно (фиг. 2а и 3).
Угловые кронштейны выполнены различных типов.
- Будем говорить, что угловой кронштейн фиг. 4, 5 является «зенитным», когда его зеркало 57 находится в равноделящей угловой кронштейн плоскости со стороны угла в 270° и когда две нижних поверхности камер находятся одна напротив другой под углом 90° (см. фиг. 2b, 4 и 5). На этих чертежах модули камер закреплены на штативах 51 и 52, которые составляют угловой кронштейн, а зеркало 57 размещено в рамке 55 и 56, сочлененной в поз. 53 - фиг. 4 - со штативами 51 и 52 (или жестко соединенной в поз. 53' - фиг. 5 - с этими штативами). Такая конфигурация позволяет лучше защитить две поверхности зеркала 57 от паразитного освещения, которое, обычно, направлено сверху, что, как правило, бывает на натурных съемках или в студии. Фиг. 2b представляет конфигурацию съемки при ношении модуля D2 и модуля G2 на правом плече. На фиг. 4 модуль D2 заменен модулем D1, то есть без возможного изменения. Действительно, для стереоскопической киносъемки с помощью устройства, носимого на плече, регулируемое межосевое расстояние на одном единственном модуле является обычно достаточным для определения стереоскопической базы.
- Будем говорить, что угловой кронштейн выполнен в крановом варианте, когда зеркало размещено в равноделящей плоскости с углом в 90°. Такая конфигурация (фиг. 6, с модулями D2 и G1, как изображено) или (D2 и G2) менее предпочтительна для солнца, но она позволяет разместить комплекс в горизонтальной плоскости очень близко от земли, что является предпочтительным для киносъемок в реальном цвете в противовес съемке с высокой точки.
- Будем говорить, что угловой кронштейн является смешанным, когда инверсия изображений вверх/вниз позволяет использовать то же самое устройство для двух применений.
- Штативы 7 для рядного расположения камер (фиг. 2а и 3) позволяют разместить рядом N модулей D2/G2 и/или D1/G1, но могут включать расширители (не представленные на чертеже) для размещения N штативов, удаленных один от другого для, например, отдаленных киносъемок.
с). Штативы 7, 51, 52 размещаются непосредственно на всем оборудовании, предназначенном для телевидения и кино таким образом, чтобы они заменяли обычные штативы, такие как конструкторские ласточкины хвосты, которые размещены между камерами и головками с механизированным или ручным приводом, на которых расположены камеры. Причина заключается в эргономике существующих систем, которые не позволяют осуществить прием с существующими точками опоры треног, регулирующих устойчивое положение и оптические оси, которые, будучи встроенными в модули, позволяют осуществить регулировки для корректирования высот оптических осей.
Обычные системы не позволяют осуществить этот тип применения, так как они не предназначены для взаимодействия этой коррекционной системы, которая требует повышенной плоскостности и повышенного качества поверхности в трех районах, куда могут опираться треножные штативы модулей.
Штативы, таким образом, являются частью комплекса камера/модуль/штатив, так как они обеспечивают взаимодействие между верхней частью головки с механизированным или ручным (рукоятка или гидропривод) приводом и модулями. Они не могут быть встроены в модули, кроме как путем крепления, гибкость которого позволяет треногам корректировать устойчивое положение и высоту оптических осей.
- Штативы обеспечивают также распределение сигналов между модулями и к источникам питания, записи или внешнего управления.
- Штативы обеспечивают включение микроконтроллера для управления совокупностью параметров команд перемещений и записи коротких последовательностей.
- Этот микромодуль может размещаться в модуле или быть встроен под зеркалом в кронштейновом положении или под оптикой в рядном расположении. Его крепление является одинаковым.
- Штативы 7, 51, 52 могут также содержать в своей толще карты управления для определенных осей или удобства для уменьшения объема модулей или для минимизации комплекса системы.
d. Техника электрических соединений:
- Совокупность соединителей совместима с модулями и штативами.
- Межсоединение может осуществляться только между модулями, только штативами и пересекаться между штативами и модулями.
- Межсоединение между объективами, автоматически регулируемыми командой перемещения, может проходить либо через модули, либо через штативы.
Ш) Комбинация модулей:
Комбинации модулей весьма многочисленны, так как если существует, в основном, 6 различных модулей для одного размера камер, D2, G2, D1, G1, D1' и G1', что дает большое количество сдвоенных попарно моделей для стереоскопии из двух точек и еще более для стереосъемки более чем из двух точек.
- D2: правый модуль перемещения и поворота; G2: левый модуль перемещения и поворота: фиг. 2а изображает правый модуль D2 и левый модуль G2, размещенные рядом.
- D1': облегченный правый модуль поворота (совместимый с G2), и D1', облегченный левый модуль поворота (совместимый с D2, фиг:8) для съемок с верхних точек, вертолета. Эти модули размещаются на модуле D2/G2. Мультипозиционирование является механическим и сохраняет перемещение заданной величины.
Все эти модули являются образующими элементами систем камер с N точек съемок (N превышает или равно 2).
Для систем киносъемок более чем из двух точек возрастающее изменение обратных величин фокусных расстояний и межосевых расстояний может являться результатом воздействия различных идентичных механизмов, приводимых системами с пропорциональными эффектами, или, напротив, масштабирующего механизма, приводимого одним моторедуктором для правых камер и одним моторедуктором для левых камер. Эти механизмы могут быть встроены в штативы модулей, как на фиг.5, где изображен угловой кронштейн большой толщины, который содержит механизмы для перемещения.
Фиг.7 изображает комплекс для киносъемки, в котором модули размещены валетом в корпусе 80 с двойным штативом для обеспечения выигрыша в габаритах. В представленном примере комплекс из 4 камер содержит два модуля D2 и два модуля G2 (или же два модуля D1 и два модуля G2). Этот комплекс размещен в корпусе 80 и образует систему для киносъемки, которая может использоваться отдельно (для стереосъемки 4-мя камерами) или, как изображено, в сборе в угловом кронштейне (с чередованием оптических осей камер двух комплексов) для стереокиносъемки 8-ю камерами. Понятно, что монтаж валетом касается случая системы, группирующей парное число камер (2, 4, 6 и т.д.). Следует также отметить, что такой монтаж вызывает поворот изображения одной камер из двух, что легко осуществить с помощью цифровых камер).
Фиг.8 изображает модуль G1', установленный вместе с модулем D2 в общем корпусе 11. В этом случае следует отметить, что коррекции устойчивых положений и оптических осей между двумя модулями возможны только при ручной регулировке. Такая конфигурация предназначается для экстремальных случаев киносъемки, таких, как съемка с высокой точки или макетов, когда речь идет о внедрении внутрь различных пейзажей. Ручные корректировки, предназначенные для фиксированных объективов, включают только установку диафрагмы.
IV) Использование модулей при установке камер для стереосъемки с двух или N точек.
Камеры могут включать модули и их штативы 7, 51, 52 с момента их разработки. Эти системы позволяют уменьшить также их габаритные размеры, располагая основные датчики камеры наиболее близко от модулей, размещая на расстоянии механические детали поворотной части таким образом, чтобы ни один элемент не превышал ни один габаритный размер при монтаже приемника за исключением, в случае модулей типа D2 и G2, которые объединяют межосевое расстояние, необходимой ширины регулировки межосевого расстояния.
Для модулей типа D1 и G1 или D1' и G1' монтаж датчика задает границы максимальных габаритных размеров модулей.
Это устройство позволяет изготавливать миниатюрные камеры, предназначенные для стереосъемки.
Преимуществами являются:
Выигрыш в месте по высоте: возможное исключение ласточкиного хвоста.
- Ортогональная и параллельная система передней плоскости камеры приемника относительно модуля во всех направлениях.
- Точное сохранение высоты оптических осей.
- Легкость оптической центровки без ошибок параллелизма.
- Значительное уменьшение высоты конструкции штатив/модуль/камера.
- Коррекция с момента изготовления устойчивых положений и оптических осей.
- Камеры, модули и штативы становятся в этой компоновке единым интегрированным модулем.
Фиг. 10 изображает модуль, снабженный единым рельсом 100. В предпочтительной конфигурации устройство привода перемещения подвижной каретки 2 между единым рельсом 100 и осью поворота 33 штатива 3 камеры. Рельс и устройство привода перемещения расположены между осью поворота и его приводом.
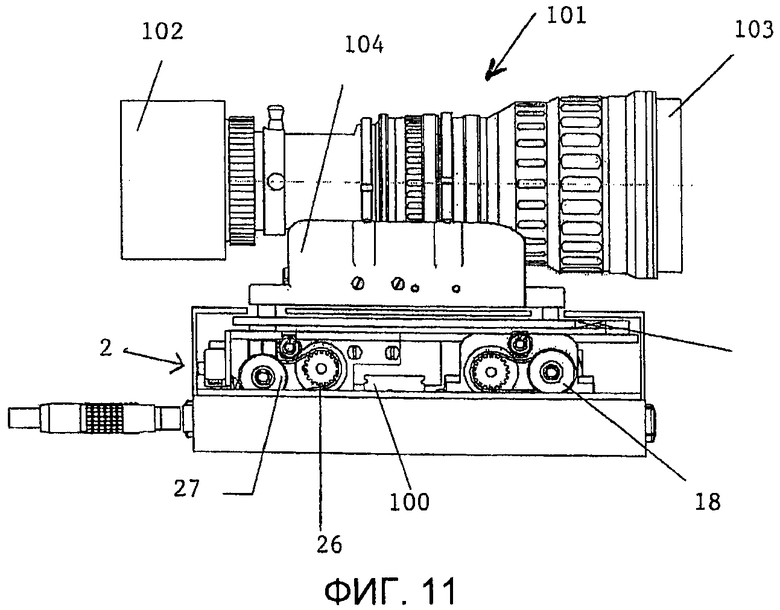
Фиг. 11 изображает предпочтительный вариант монтажа устройства киносъемки 101, имеющего, с одной стороны, корпус 102 для съемки, включающий приемник, и, с другой стороны объектив 103. Объектив 103 жестко соединен с поворотным элементом 3, например, посредством корпуса, который содержит механизированную оптику 104.
| название | год | авторы | номер документа |
|---|---|---|---|
| Видеорегистратор зоопланктона | 2017 |
|
RU2670713C9 |
| Устройство для стереорентгенографии | 1990 |
|
SU1736439A1 |
| УСТРОЙСТВО ДЛЯ СТЕРЕОФЛЮОРОГРАФИИ | 2001 |
|
RU2185777C1 |
| Устройство для стереограмметрической съемки | 1936 |
|
SU49285A1 |
| СПОСОБ ПОЛУЧЕНИЯ СТЕРЕОСКОПИЧЕСКИХ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ С АВТОМАТИЧЕСКИМ ИЗМЕРЕНИЕМ ПРЕДМЕТНОГО ПРОСТРАНСТВА В РЕАЛЬНОМ ВРЕМЕНИ | 2012 |
|
RU2490819C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СТЕРЕОСКОПИЧЕСКИЙ ДАЛЬНОМЕР | 2014 |
|
RU2579532C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА НАБЛЮДЕНИЯ И РЕГИСТРАЦИИ | 1992 |
|
RU2062983C1 |
| Способ растровой стереосъемки и проекции | 1960 |
|
SU137287A1 |
| Способ панорамной стереосъемки | 2016 |
|
RU2650088C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОСАДКОЙ МАЛОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735196C1 |
Изобретение относится к штативному модулю камеры для стереокиносъемки. Штативный модуль камеры содержит подвижную каретку, перемещающуюся вдоль, по меньшей мере, одного направляющего рельса, устройство привода перемещения каретки и поворотный элемент штатива камеры, имеющий ось вращения. Поворотный элемент размещен на подвижной каретке и имеет направляющий элемент, а также привод, взаимодействующий с направляющим элементом. Устройство привода перемещения каретки расположено между приводом, взаимодействующим с направляющим элементом и поворотной осью поворотного элемента. Техническим результатом является обеспечение большей точности перемещений каретки и поворота штатива, а также создание компактной конструкции устройства. 3 н. и 23 з.п. ф-лы, 14 ил.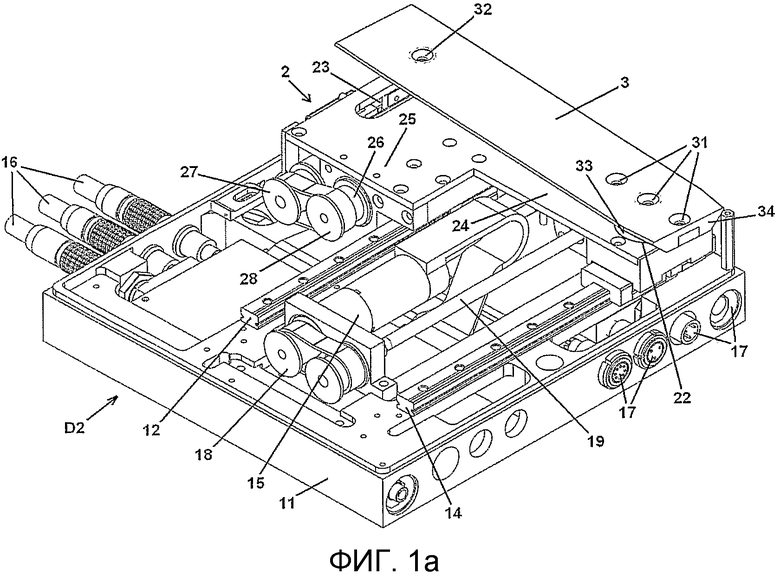
1. Штативный модуль камеры для стереосъемки, отличающийся тем, что он содержит подвижную каретку (2) для перемещения в плоскости перемещения и содержащую направляющее средство для взаимодействия, по меньшей мере, с одним направляющим рельсом, размещенным на первой поверхности корпуса модуля, а также устройство привода перемещения упомянутой подвижной каретки, поворотный элемент (3) штатива камеры, размещенный на подвижной каретке и имеющий поворотную ось и направляющий элемент (32), а также привод (27), взаимодействующий с направляющим элементом (32) для обеспечения его перемещения таким образом, чтобы осуществлять поворот штативного элемента камеры, причем устройство привода перемещения подвижной каретки расположено между приводом (27) и поворотной осью (33) поворотного элемента (3).
2. Модуль по п.1, отличающийся тем, что направляющий элемент (32) выполнен с возможностью скольжения в направляющей прорези (23), выполненной в подвижной каретке (2).
3. Модуль по одному из пп.1 или 2, отличающийся тем, что подвижная перемещающаяся каретка направляется двумя направляющими параллельными рельсами, причем поворотный элемент штатива камеры размещен, по меньшей мере, в пространстве между двумя направляющими рельсами.
4. Модуль по п.3, отличающийся тем, что ось вращения поворотного элемента штатива камеры размещена над первым рельсом.
5. Модуль по п.3, отличающийся тем, что привод размещен снаружи пространства между двумя рельсами, причем направляющий элемент размещен в области элемента поворотного штатива камеры вне пространства между двумя рельсами.
6. Модуль по п.3, отличающийся тем, что устройство привода перемещения подвижной каретки размещено в пространстве между двумя рельсами.
7. Модуль по одному из пп.1 или 2, отличающийся тем, что подвижная перемещающаяся каретка направляется одним единственным направляющим рельсом.
8. Модуль по п.7, отличающийся тем, что устройство привода перемещения подвижной каретки размещено между упомянутым направляющим рельсом и осью вращения (33) привода (27) поворотного элемента (3).
9. Модуль по одному из пп.1 или 2, отличающийся тем, что привод и/или устройство привода выполнено в виде шарикового винта или червячной передачи.
10. Модуль по одному из пп.1 или 2, отличающийся тем, что поворотный элемент штатива камеры встроен в скользящий штатив камеры.
11. Модуль по одному из пп.1 или 2, отличающийся тем, что поворотная ось содержит гибкий элемент (90.91), обеспечивающий в одном направлении поворотное перемещение и имеющий повышенную жесткость в других направлениях.
12. Модуль по одному из пп.1 или 2, отличающийся тем, что максимальный угол поворота поворотного элемента равен, самое большее, 10° и, предпочтительно, 5°.
13. Модуль по одному из пп.1 или 2, отличающийся тем, что он содержит устройство коррекции посадки по трем точкам, которое встроено в корпус модуля и которое содержит три органа управления, размещенные в желобках, выполненных во второй поверхности корпуса модуля, противоположной первой поверхности, а также три подвижных элемента, перпендикулярных плоскости перемещения модуля.
14. Модуль по одному из пп.1 или 2, отличающийся тем, что он содержит устройство для стереосъемки, включающее корпус (102) для стереосъемки и объектив (103), при этом только объектив (103) жестко соединен со штативом камеры (3) благодаря корпусу, содержащему средства механизации объективов.
15. Устройство для стереосъемки, отличающееся тем, что оно содержит, по меньшей мере, один модуль по п.1 и управляющее устройство для генерирования параметров управления перемещением подвижной каретки и поворотного элемента штатива камеры одного или нескольких упомянутых модулей, а также, по меньшей мере, для регулировки камер, расположенных на одном или нескольких модулях.
16. Устройство по п.15, отличающееся тем, что оно содержит, по меньшей мере, два модуля по п.1.
17. Устройство по одному из пп.15 или 16, отличающееся тем, что оно содержит, по меньшей мере, один модуль, включающий только один поворотный элемент штатива камеры.
18. Устройство по одному из пп.15 или 16, отличающееся тем, что устройство управления имеет первый операционный вариант, называемый уровнем 1, при котором упомянутые параметры выставляются независимо друг от друга, второй операционный вариант, называемый уровнем 2, при котором, по меньшей мере, один параметр зависит от другого параметра.
19. Устройство по п.18, отличающееся тем, что два параметра представляют собой угол обратной величины фокусного расстояния и расстояние регулировки.
20. Устройство по п.18, отличающееся тем, что устройство управления имеет третий операционный вариант, называемый уровнем 3, в котором первый параметр зависит от второго параметра, который зависит, по меньшей мере, от третьего параметра.
21. Устройство по п.20, отличающееся тем, что первым параметром является межосевое расстояние между двумя камерами двух модулей, вторым параметром является угол обратной величины фокусного расстояния, и третьим параметром является расстояние регулировки.
22. Устройство по одному из пп.15 или 16, отличающееся тем, что модули установлены на угловом кронштейне, при этом, по меньшей мере, два модуля размещены с обеих сторон возвратного полуотражательного зеркала.
23. Устройство по одному из пп.15 или 16, отличающееся тем, что модули встроены в камеры.
24. Устройство по одному из пп.15 или 16, отличающееся тем, что, по меньшей мере, одна пара симметричных модулей установлена валетом в одном корпусе.
25. Устройство по п.24, отличающееся тем, что оно содержит два упомянутых корпуса, установленных на угловом кронштейне с обеих сторон полуотражательного зеркала с чередованием осей камер, которые размещены в модулях, расположенных в соответствующих корпусах.
26. Комплекс модулей устройства для стереосъемки по одному из пп.15 или 16, отличающийся тем, что он содержит модули различных размеров для камер различных видов, причем параметры управления модулями независимы от модуля, так что сигналы управления управляющего устройства используются для всех модулей различных комплексов модулей, содержащих стереоскопические камеры.
| US 2006204240 А1, 14.09.2006 | |||
| РАСТРОВОЙ СТЕРЕОСЪЕМКИ | 0 |
|
SU340997A1 |
| ВСЕСОЮЗНАЯ ;|ОЛЕНТ1Ш-;ШШ4ЕСНАП'"S БИБЛИОТЕКА | 0 |
|
SU352255A1 |
| Устройство формирования сигнала для коррекции искажений телевизионного изображения | 1985 |
|
SU1317687A2 |
| МНОГОПОЛЮСНЫЙ БЛОК ПРЕРЫВАТЕЛЕЙ, СПОСОБ РАБОТЫ РАСПРЕДЕЛИТЕЛЬНОЙ СИСТЕМЫ И РАСПРЕДЕЛИТЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2260890C2 |

