Изобретение относится к способам управления скоростью изменения высоты полета и может быть использовано в составе системы управления универсальной роботизированной платформы базирования беспилотных летательных аппаратов для осуществления их контролируемой автоматической посадки.
Из уровня техники известен способ точной посадки беспилотного летательного аппарата (RU 2539703 C1, МПК В64С 13/20, опубл. 27.01.2015). Способ включает в себя выполнение посадки БЛА в улавливающую сеть. При этом предварительно формируют круговую зону захода на посадку, для чего в заданной точке посадки устанавливают ненаправленный источник радиоизлучения, а на борту БЛА устанавливают радиопеленгатор, выполняют автономный ввод БЛА в зону захода на посадку, используя штатное бортовое навигационное оборудование, производят прием сигналов ненаправленного источника радиоизлучения и выполняют его угловое сопровождение в горизонтальной и вертикальной плоскостях бортовым радиопеленгатором, по данным которого с помощью бортовой системы управления формируют команды самонаведения БЛА на источник радиоизлучения.
Недостатком известного способа точной посадки является то, что он применим только к беспилотным летательным аппаратам самолетного типа и не применим для БЛА других типов. Кроме того при посадке БЛА в улавливающую сеть значительно возрастает вероятность повреждения летательного аппарата.
Наиболее близким техническим решением к заявленному изобретению и выбранным в качестве прототипа признан способ контроля автоматической посадки/взлета беспилотного летательного аппарата на круглую посадочную сетку платформы (RU 2490687 C1, МПК G05D 1/06, опубл. 20.08.2013). Способ включает в себя этапы отслеживания движений, вычисления среднего положения, вычисления предсказаний положения и вычисления минимальных значений скорости перемещения сетки, а также этап определения положения беспилотного летательного аппарата, при этом если беспилотный летательный аппарат не может следовать за перемещением сетки и если перемещение сетки является ограниченным, то есть меньше ее радиуса, применяют стратегию посадки путем отслеживания среднего положения сетки, тогда как, если перемещение сетки является значительным, то есть превышающим радиус сетки, применяют стратегию посадки путем позиционирования по минимальным значениям скорости сетки.
Недостатком известного способа является сложность его адаптации для решения задач регулярного автоматического беспилотного мониторинга объектов и территорий в удаленных и труднодоступных районах.
Технической задачей, на решение которой направлено заявленное изобретение, является обеспечение возможности автоматической точной посадки малого беспилотного летательного аппарата на универсальную роботизированную платформу базирования.
Указанная задача решена тем, что способ управления посадкой беспилотного летательного аппарата включает отслеживание системой управления универсальной роботизированной платформы базирования перемещений малого беспилотного летательного аппарата и передачу ему управляющих команд для выполнения маневра на снижение и заход на посадку по радиоканалу. Отличает способ от известных аналогов то, что предварительно активируют светодиодную панель, закрепленную на взлетно-посадочной площадке универсальной роботизированной платформы, отображающую светотехнические метки для ориентации по ним системы технического зрения малого беспилотного летательного аппарата, активируют систему бинокулярного стереоскопического зрения, установленную на универсальной роботизированной платформе базирования, фокусируют ее на летательном аппарате, вычисляя карты глубины стереоизображения и определяя расстояние от него до универсальной роботизированной платформы в реальном времени. На этапах выравнивания и выдерживания подают команду малому беспилотному летательному аппарату на поиск светотехнических меток, отображаемых светодиодной панелью, корректируя его полет на основе вычисляемого расстояния от летательного аппарата до универсальной роботизированной платформы. После нахождения малым беспилотным летательным аппаратом взлетно-посадочной площадки и зависания над ней подают летательному аппарату команду на поиск светотехнических меток, нанесенных на поверхность универсальной роботизированной платформы, а при снижении вертикальной скорости и приземлении корректируют скорость и координаты малого беспилотного летательного аппарата с помощью системы технического зрения упомянутого летательного аппарата и системы бинокулярного стереоскопического зрения платформы базирования.
Положительным техническим результатом, обеспечивающимся раскрытой выше совокупностью признаков способа, является возможность пространственной ориентации малого беспилотного летательного аппарата и его автоматической посадки на универсальную роботизированную платформу базирования малых беспилотных летательных аппаратов (МБЛА).
Изобретение поясняется чертежами, где на фиг. 1 представлен общий вид универсальной роботизированной платформы базирования МБЛА; на фиг. 2 представлена взлетно-посадочная площадка с зафиксированным на ней малым беспилотным летательным аппаратом; на фиг. 3 представлено устройство технического зрения, используемого в составе системы бинокулярного зрения и системе технического зрения беспилотного летательного аппарата; на фиг. 4 представлен малый беспилотный летательный аппарат мультироторного типа с закрепленной на ней системе технического зрения; на фиг 5 приведена геометрическая схема системы бинокулярного зрения.
Способ управления посадкой беспилотного летательного аппарата осуществляется с помощью технических средств, состав и структура которых описаны ниже.
Универсальная роботизированная платформа базирования 1 беспилотных летательных аппаратов закреплена на крыше наземного транспортного средства 2 высокой проходимости. Платформа включает в себя роботизированный док 3, содержащий взлетно-посадочную площадку 4, выполненную с возможностью посадки на нее беспилотных летательных аппаратов 5 вертикального взлета и их фиксации, снабженную узлом бесконтактной зарядки аккумуляторных батарей упомянутых аппаратов.
Система бинокулярного стереоскопического зрения выполнена на основе двух устройств технического зрения, включающих в себя камеры, размещенные в одной плоскости таким образом, что главные оптические оси камер являются взаимно параллельными друг другу и перпендикулярными плоскости камер. Камеры работают синхронно и передают видеопоток по беспроводному каналу связи на сервер системы управления универсальной роботизированной платформы, снабженный Ethernet-контроллером и WiFi-модулем, выполняющий вычисление карты глубины изображения и распознавание трехмерных объектов в реальном времени. Система управления платформой дополнительно снабжена радиостанцией.
Каждое из устройств технического зрения имеет следующую конструкцию.
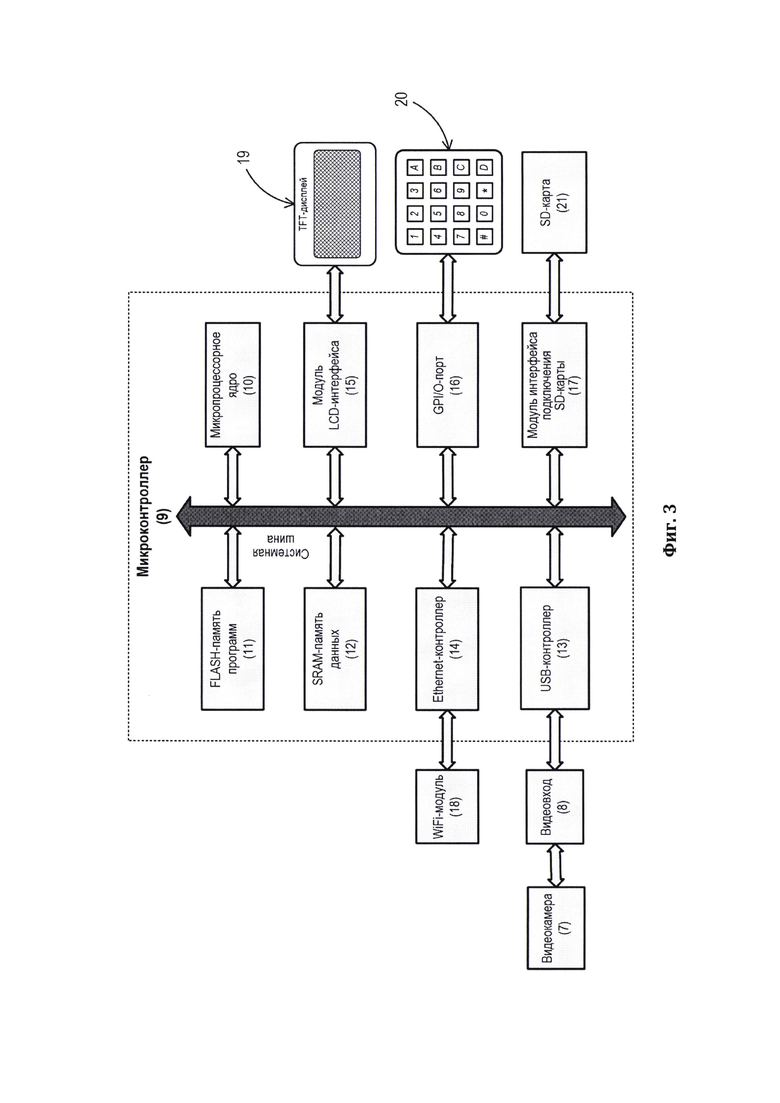
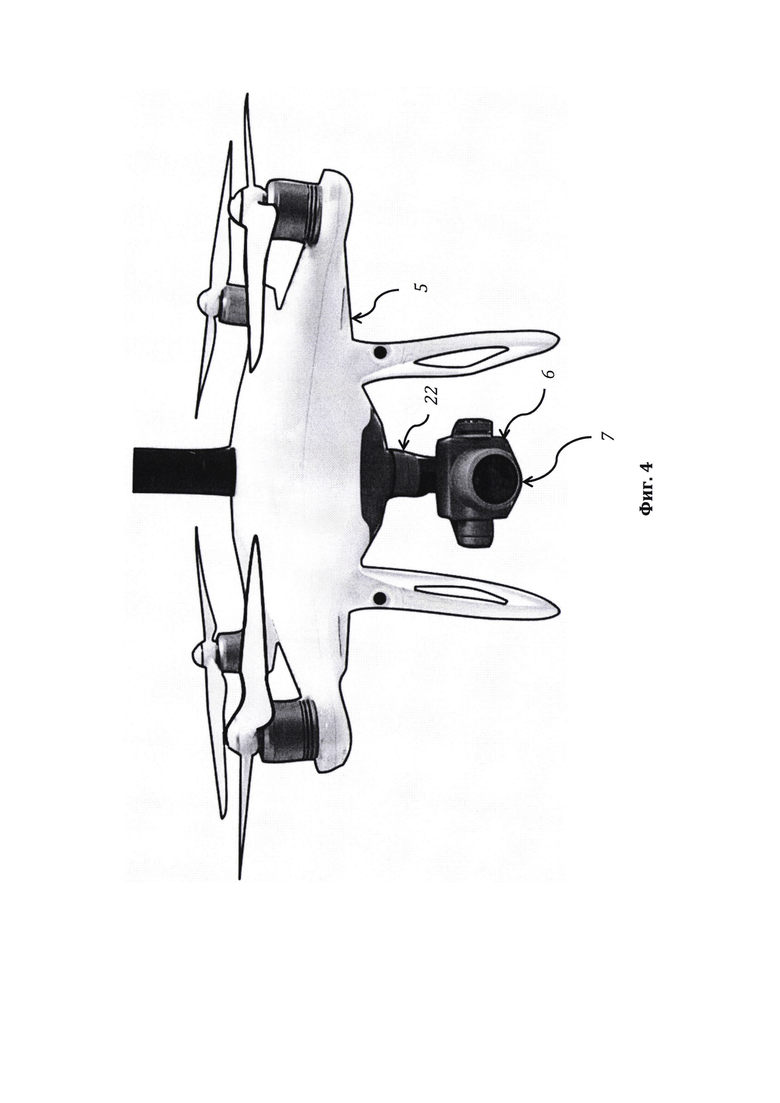
Основой устройства является корпус 6, с закрепленной на его внешней поверхности видеокамерой 7 с USB-выходом, совмещенной с дальномером (на фигурах условно не показан), подключенной с помощью USB-кабеля к видеовходу 8 блока управления, размещенному внутри корпуса 6, выполненного на основе микроконтроллера 9, содержащего микропроцессорное ядро 10, соединенное с помощью системной шины с FLASH-памятью программ 11, SRAM-памятью данных 12, USB-контроллером 13, Ethernet-контроллером 14, модулем LCD-интерфейса 15, интерфейсом ввода-вывода общего назначения, сгруппированного в восьмиразрядный GPI/O-порт ввода-вывода 16, и модулем подключения SD-карты 17. Видеокамера 7 выполнена с возможностью получения видеопотока сверхвысокой четкости, к USB-контроллеру 13 подключен видеовход 8 блока управления, Ethernet-контроллер 14 подключен к WiFi-модулю 18, к модулю LCD-интерфейса 15 электрически подключен TFT-дисплей 19, к восьмиразрядному GPI/O-порту ввода-вывода 16 подключена кнопочная клавиатура 20, а в слот модуля подключения SD-карты 17 вставлена и электрически соединена с модулем SD-карта 21.
В качестве видеокамеры, выполненной с возможностью получения видеопотока сверхвысокой четкости, может быть применена «экшн камера» модели YI 4K+1 (1 Экшн камера YI 4К+ // YI. URL: http://www.yitechnology.ru/yi-4k-plus-action-camera-specs (дата обращения: 12.12.2019)); в качестве дальномера может быть использован лазерный датчик расстояния VL53L0X2 (2 Датчик расстояния лазерный VL53L0X // MCU Store. URL: https://mcustore.ru/store/datchiki-i-sensory / datchik-rasstoyaniya-lazernyj-v15310x-gy-530/?gclid=Cj0KCQiA89zvBRDoARIsAOIePbAKYLBUlgBsySS-4FmwgHK5KG8k2w9CO0-86m76K2SSK7HJMBKzRFgaAoVHEALwwcB (дата обращения: 12.12.2019)), подключенный к микроконтроллеру посредством интерфейса I2C; в качестве микроконтроллера может быть использована любая известная микросхема на микропроцессорном ядре Cortex-M4F/R, ориентированном на создание высокопроизводительных систем реального времени для авиации и других ответственных применений. В качестве такой микросхемы может быть применен отечественный микроконтроллер К1921ВК01Т3 (3 Практический курс микропроцессорной техники на базе процессорных ядер ARM-Cortex-M3/M4/M4F [электронный ресурс]: учебное пособие - электрон, текстовые дан. (12 Мб) / В.Ф. Козаченко, А.С. Анучин, Д.И. Алямкин и др.; под общ. ред. В.Ф. Козаченко. - М.: Издательство МЭИ, 2019. - 543 с. Режим доступа: http://motorcontrol.ru/wp-content/uploads/2019/04/Практический курс микропроцессор.pdf); в качестве WiFi-модуля может быть использована сборка ESP8266-014 (4 Модуль ESP8266-01 WiFi // MCU Store. URL: https://mcustore.ru/store/moduli-svazi/modul-wifi-esp8266/?gclid=CjwKCAiA58fvBRAzEiwAQW-hzezFoQo60DEhZStdn7fMT-5DeNRZ2oIBfBdkNm5re0i2KG bfe3YFBoCu08QAvD BwE. (дата обращения: 12.12.2019)), а в качестве TFT-дисплея модель RPI LCD5 (5 3.2 inch RPi LCD // ChipDip.ru URL: https://www.chipdip.ru/product/3.2inch-rpi-lcd-b (дата обращения: 12.12.2019)) с резистивным сенсорным экраном и диагональю 8,1 см.
Для осуществления способа посадки малый беспилотный летательный аппарат снабжают системой технического зрения, состоящей из одного устройства, конструкция которого описана выше. Корпус устройства закрепляют на кронштейне 22 малого беспилотного летательного аппарата 5. После активации блока управления с помощью кнопочной клавиатуры 20 и TFT-дисплея 19 производят калибровку устройства, заключающуюся в настройке режимов видеосъемки видеокамеры 7, конфигурировании параметров Ethernet-контроллера 14 и WiFi-модуля 18, для осуществления обмена данными между микроконтроллером 9 системой управления МБЛА и системой управления универсальной роботизированной платформы базирования беспилотных летательных аппаратов. Конфигурирование параметров Ethernet-контроллера 14 и WiFi-модуля 18 включает в себя выбор способа шифрования данных (предпочтительным является шифрование WPA2] и ввод ключа безопасности сети. В SD-карту 21 записывают изображения-эталоны светотехнических меток, нанесенных на поверхность универсальной роботизированной платформы базирования МБЛА, после чего SD-карту 21 устанавливают в гнездо модуля интерфейса подключения SD-карты 17.
Способ управления посадкой беспилотного летательного аппарата осуществляют следующим образом.
При выполнении всех этапов полета система управления универсальной роботизированной платформы базирования осуществляет отслеживание перемещений малого беспилотного летательного аппарата (МБЛА) мультироторного типа по радиоканалу.
Последний этап полета связан с выполнением посадки МБЛА «по-вертолетному», при этом посадочной траектории такого способа присущи следующие элементы: выравнивание, выдерживание и висение.
Перед началом передачи управляющих команд для выполнения маневра на снижение и заход на посадку система управления роботизированной платформы на основе управляющей программы раскрывает створки ангара платформы и с помощью рычажного механизма 23 выдвигает из роботизированного дока 3 взлетно-посадочную площадку 4, а затем активирует светодиодную панель 24, закрепленную на взлетно-посадочной площадке и формирующую сложные динамически изменяемые светотехнические метки, различимые системой технического зрения беспилотного летательного аппарата на большой высоте, обеспечивающие пространственную ориентацию по ним МБЛА. Далее система управления активирует систему бинокулярного стереоскопического зрения, установленную на универсальной роботизированной платформе базирования и фокусирует ее на летательном аппарате.
После подачи команды МБЛА на выполнение маневра на снижение и захода на посадку система управления платформы начинает в реальном времени осуществлять его съемку с помощью системы бинокулярного стереоскопического зрения, вычисляя карты глубины стереоизображения и определяя расстояние от МБЛА до универсальной роботизированной платформы.
Вычисление карт глубины стереоизображения включает в себя предобработку входных данных, вычисление диспаритета пикселей и конечную постобработку выходных данных медианным фильтром. Под диспаритетом понимается расстояние между пикселями одного и того же объекта на левом и правом изображении. Существующие локальные методы по вычислению карты диспаритета основаны на принципе «скользящего окна». Они характеризуются определенной сбалансированностью скорости-качества, хорошо масштабируются и реализуются на таких параллельных архитектурах, как видеокарты6 (6 Kanade Т., Okutomi М.А. Stereo Matching Algorithm with an Adaptive Window: Theory and Experiment // Proceedings of the 1991 IEEE International Conference on Robotics and Automation (ICRA'91). 1991. P. 1088-1095.).
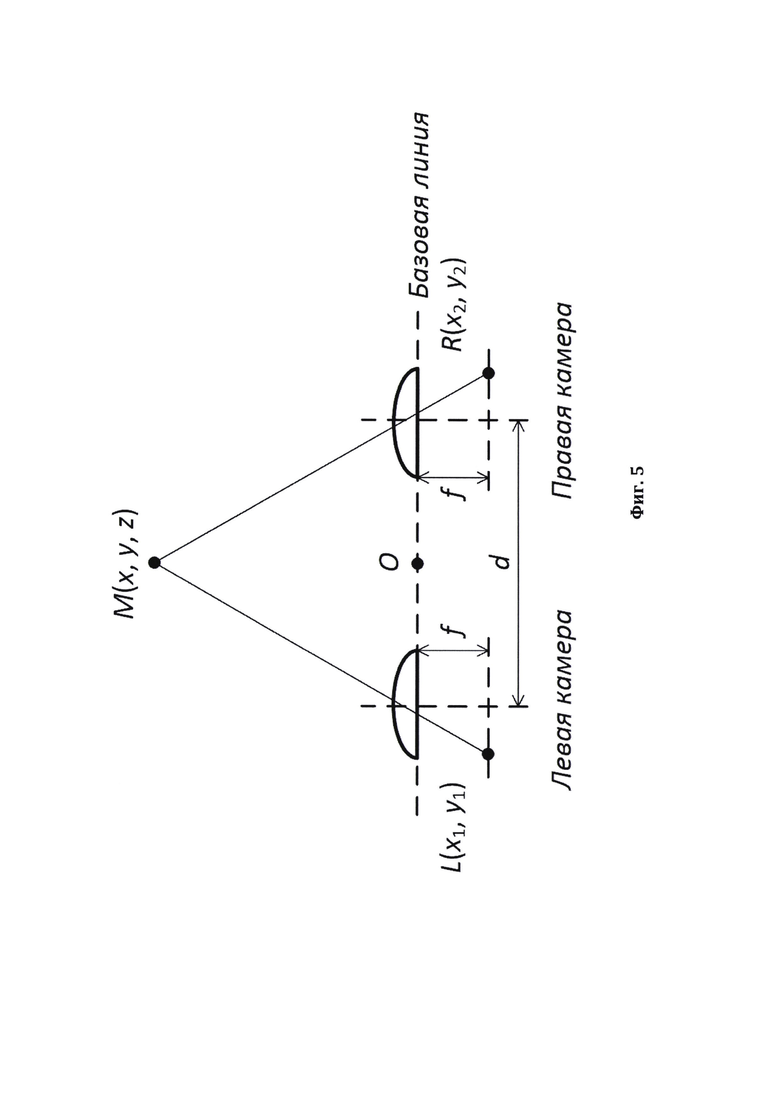
Расстояние от платформы до МБЛА может быть определено следующим образом. Учитывая, что оптические оси видеокамер 7 параллельны, а сами камеры находятся друг от друга на некотором расстоянии d, известно фокусное расстояние камер ƒ и начало координат О (фиг. 5), для вычисления трехмерной координаты точки положения МБЛА М (х, у, z) в мировых координатах трехмерного пространства можно использовать следующие зависимости:

где L(x1, у1) - левая проекция точки М; R(x2, у2) - правая проекция точки М; d - расстояние между камерами; ƒ - фокусное расстояние.
Полученные данные передаются по радиоканалу малому беспилотному летательному аппарату и используются системой его управления для корректировки траектории полета летательного аппарата.
На этапах выравнивания и выдерживания система управления платформы подает беспилотному летательному аппарату команду на поиск светотехнических меток, отображаемых светодиодной панелью. Для этого система технического зрения МБЛА с помощью видеокамеры 7 выполняет непрерывную съемку взлетно-посадочной площадки с заданной частотой кадров и разрешением, передавая видеопоток через видеовход 8 и USB-контроллер 13 микроконтроллеру 9 для обработки изображений и распознавания светотехнических меток на основе управляющей программы, хранящейся во FLASH-памяти программ 11. Процедура распознавания меток выполняется в несколько этапов. На первом этапе выполняется бинарное квантование изображения, на втором этапе выполняется логическая обработка изображения, заключающаяся в определении координат и площади найденных меток, на последнем этапе осуществляется идентификация объектов путем сравнения их выборочных характеристик с параметрами объектов-эталонов изображений светотехнических меток, хранящихся в памяти SD-карты 21.
После нахождения беспилотным летательным аппаратом взлетно-посадочной площадки и зависания над ней система управления платформой подает команду беспилотному летательному аппарату на поиск светотехнических меток, нанесенных на поверхность универсальной роботизированной платформы.
При снижении вертикальной скорости и приземлении скорость и координаты малого беспилотного летательного аппарата корректируются с помощью системы технического зрения упомянутого МБЛА и системой управления платформой на основе видеопотока, получаемого от бинокулярной системы стереоскопического зрения способами, описанными выше.
Таким образом, рассмотренный в настоящей заявке способ, обеспечивает посадку малого беспилотного летательного аппарата на взлетно-посадочную площадку универсальной роботизированной платформы в автоматическом режиме с высокой точностью, за счет применения двух систем коррекции положения - системы бинокулярного стереоскопического зрения платформы и системы технического зрения МБЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОСАДКОЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2518434C2 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| УСТРОЙСТВО ДЛЯ ВЗЛЕТА И ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2694251C2 |
| СПОСОБ ПОСАДКИ БВС САМОЛЕТНОГО ТИПА НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ПРИБОРОВ РАЗЛИЧНОГО ДИАПАЗОНА | 2019 |
|
RU2724908C1 |
| Информационно-измерительная и управляющая система посадки группы беспилотных летательных аппаратов на посадочную платформу | 2022 |
|
RU2784221C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ БОКС ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 2023 |
|
RU2818898C1 |
| Корабельный динамический аэропричал для мультикоптеров | 2023 |
|
RU2828127C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2024 |
|
RU2837679C1 |


Изобретение относится к способу управления посадкой малого беспилотного летательного аппарата (МБЛА) на площадку универсальной роботизированной платформы. Для осуществления способа активируют расположенную на платформе систему бинокулярного стереоскопического зрения, фокусируют ее на МБЛА, вычисляют карты глубины стереоизображения и определяют до него расстояние в реальном времени, на основании которой передают МБЛА управляющие команды по радиоканалу для корректировки его полета. Дополнительно подают команду летательному аппарату на поиск светодиодных меток, отображаемых на светодиодной панели, для ориентации по ним при помощи расположенной на нем системы технического зрения. Обеспечивается повышение точности автоматической посадки беспилотного летательного аппарата. 3 з.п. ф-лы, 5 ил.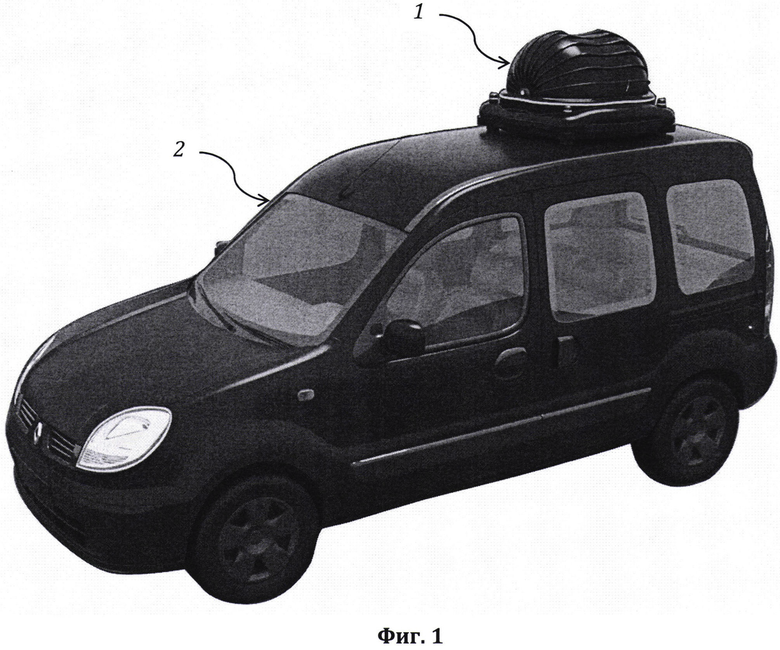
1. Способ управления посадкой беспилотного летательного аппарата, включающий отслеживание системой управления универсальной роботизированной платформы базирования перемещений малого беспилотного летательного аппарата и передачу ему управляющих команд для выполнения маневра на снижение и заход на посадку по радиоканалу, отличающийся тем, что предварительно активируют светодиодную панель, закрепленную на взлетно-посадочной площадке универсальной роботизированной платформы, отображающую светотехнические метки для ориентации по ним системы технического зрения малого беспилотного летательного аппарата, активируют систему бинокулярного стереоскопического зрения, установленную на универсальной роботизированной платформе базирования, фокусируют ее на летательном аппарате, вычисляя карты глубины стереоизображения и определяя расстояние от него до универсальной роботизированной платформы в реальном времени; на этапах выравнивания и выдерживания подают команду малому беспилотному летательному аппарату на поиск светотехнических меток, отображаемых светодиодной панелью, корректируя его полет на основе вычисляемого расстояния от летательного аппарата до универсальной роботизированной платформы; после нахождения малым беспилотным летательным аппаратом взлетно-посадочной площадки и зависания над ней подают летательному аппарату команду на поиск светотехнических меток, нанесенных на поверхность универсальной роботизированной платформы, а при снижении вертикальной скорости и приземлении корректируют скорость и координаты малого беспилотного летательного аппарата с помощью системы технического зрения упомянутого летательного аппарата и системы бинокулярного стереоскопического зрения платформы базирования.
2. Способ по п. 1, отличающийся тем, что карты глубины стереоизображения формируют, выполняя предобработку входных данных, вычисление диспаритета пикселей и осуществляя конечную постобработку выходных данных медианным фильтром.
3. Способ по п. 1, отличающийся тем, что для поиска светотехнических меток, отображаемых светодиодной панелью, системой технического зрения МБЛА с помощью видеокамеры выполняют непрерывную съемку взлетно-посадочной площадки с заданной частотой кадров и разрешением, передавая видеопоток через видеовход и USB-контроллер микроконтроллеру системы технического зрения для обработки изображений и распознавания светотехнических меток на основе управляющей программы, хранящейся во FLASH-памяти программ.
4. Способ по п. 3, отличающийся тем, что для распознавания меток выполняют бинарное квантование изображения, далее выполняют логическую обработку изображения, заключающуюся в определении координат и площади найденных меток, затем осуществляют идентификацию объектов путем сравнения их выборочных характеристик с параметрами объектов-эталонов изображений светотехнических меток, хранящихся в памяти SD-карты.
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2666479C1 |
| WO 2019055340 A2, 21.03.2019 | |||
| US 20170314924 A1, 02.11.2017 | |||
| WO 2007124014 A2, 01.11.2007. | |||

