СВЯЗАННЫЕ ЗАЯВКИ
По настоящей заявке испрашивается приоритет предварительной патентной заявки США № 61/098360, озаглавленной "Wireless Network Synchronization using Coordinated Silence", поданной 19 сентября 2008, и предварительной патентной заявки США № 61/115465, озаглавленной "Timing Synchronization Based on Backhaul Messaging for Silencing an Asynchronous Neighbor Cell", поданной 17 ноября 2008.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системам связи. Более конкретно, настоящее изобретение относится к синхронизации базовой станции в системе беспроводной связи.
УРОВЕНЬ ТЕХНИКИ
Системы беспроводной связи стали важным средством, с помощью которого люди по всему миру получили возможность общаться. Система беспроводной связи может обеспечить связь для множества мобильных устройств, каждое из которых может обслуживаться базовой станцией. Примеры мобильных устройств включают в себя сотовые телефоны, персональные цифровые секретари (PDA), карманные устройства, беспроводные модемы, карманные компьютеры, персональные компьютеры и т.п.
Поскольку беспроводная связь становится более популярной, имеются новые требования рентабельно обеспечивать большие объемы вызова и поддержания качества вызова. Один из путей повысить эффективность состоит в том, чтобы максимизировать скорость передачи данных базовыми станциями. Синхронизированные базовые станции вызывают меньше помех у соседних базовых станций, чем асинхронные базовые станции, таким образом обеспечивая возможность более высоких скоростей передачи данных. Следовательно, могут быть реализованы преимущества посредством улучшенных способов и устройств для синхронизации базовой станции в системе беспроводной связи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием конкретных вариантов его осуществления со ссылками на чертежи, на которых:
фиг.1 - блок-схема, иллюстрирующая систему беспроводной связи для синхронизации базовых станций,
фиг.2 - блок-схема, иллюстрирующая пикобазовую станцию с модулем паузы,
фиг.3 - блок-схема, иллюстрирующая основанный на слоях модуль, который может находиться в пикобазовой станции,
фиг.4 - диаграмма последовательности, иллюстрирующая систему беспроводной связи для синхронизации базовых станций, с использованием следующих друг за другом интервалов паузы,
фиг.4а - диаграмма последовательности, иллюстрирующая систему беспроводной связи для синхронизации базовых станций, с использованием не следующих друг за другом интервалов паузы,
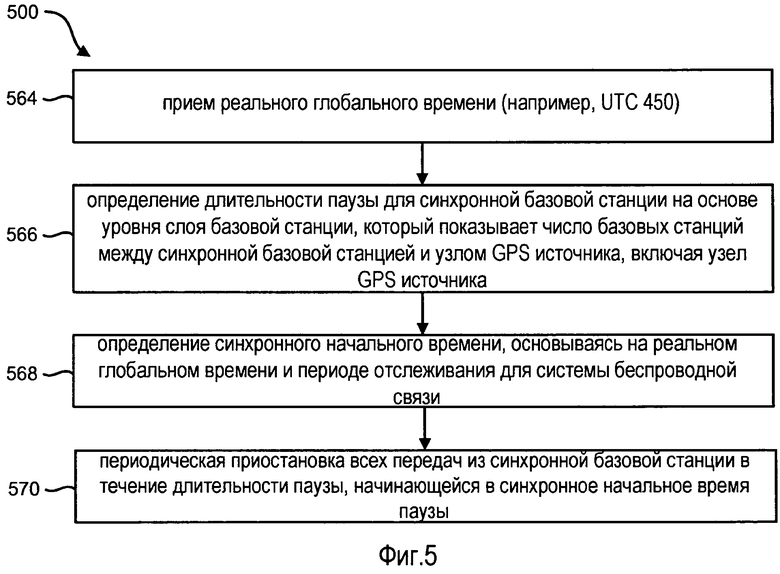
фиг.5 - блок-схема, иллюстрирующая способ глушения синхронной базовой станции,
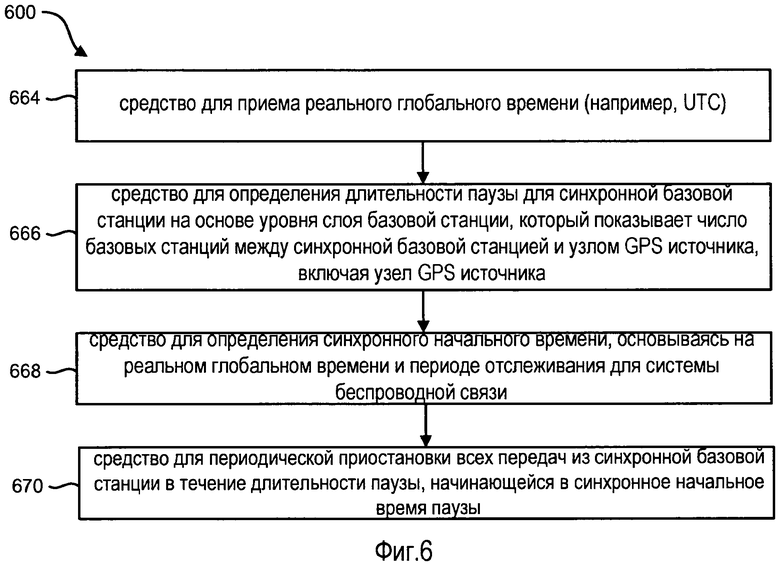
фиг.6 иллюстрирует блоки "средство плюс функция", соответствующие способу по фиг. 5,
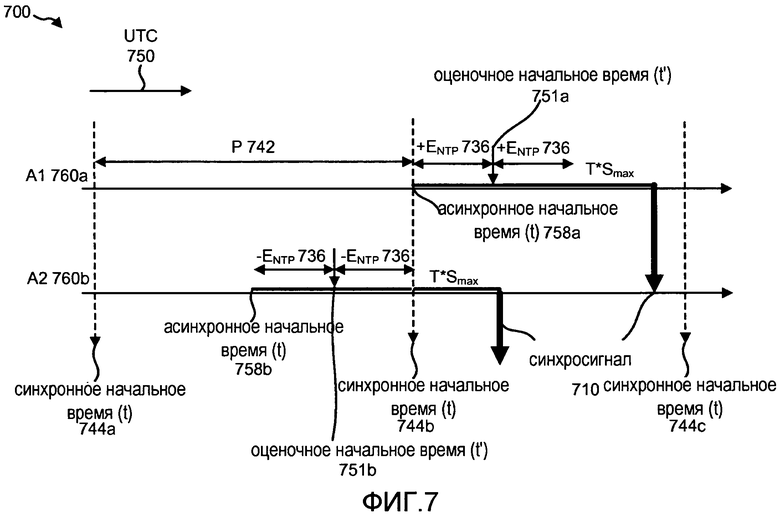
фиг.7 - другая диаграмма последовательности, иллюстрирующая систему беспроводной связи для синхронизации базовых станций,
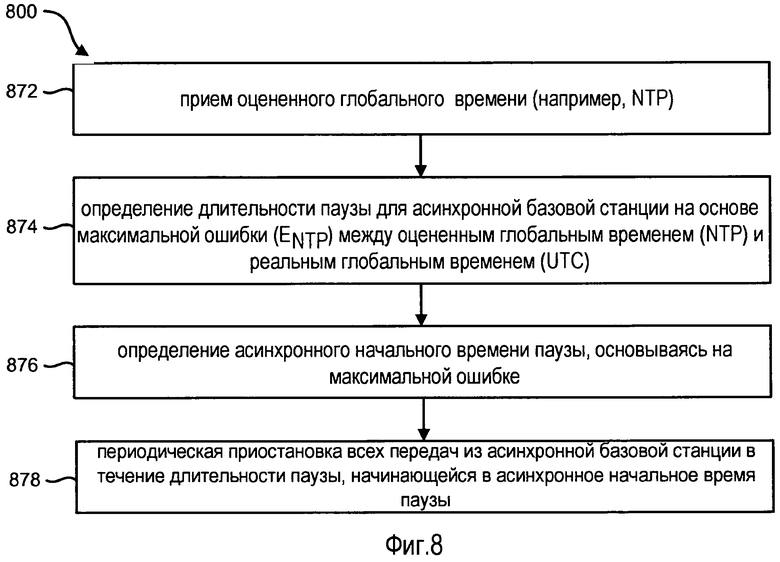
фиг.8 - блок-схема, иллюстрирующая способ глушения асинхронной базовой станции,
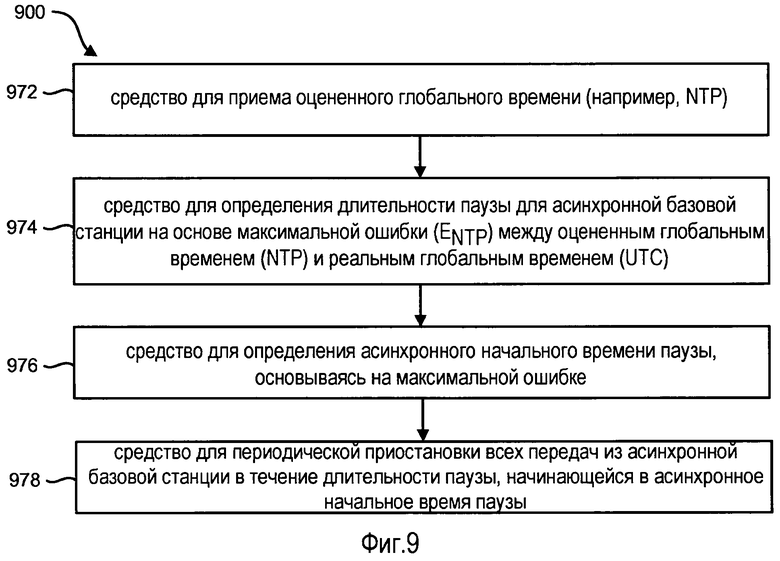
фиг.9 иллюстрирует блоки "средство плюс функция", соответствующие способу по фиг. 8,
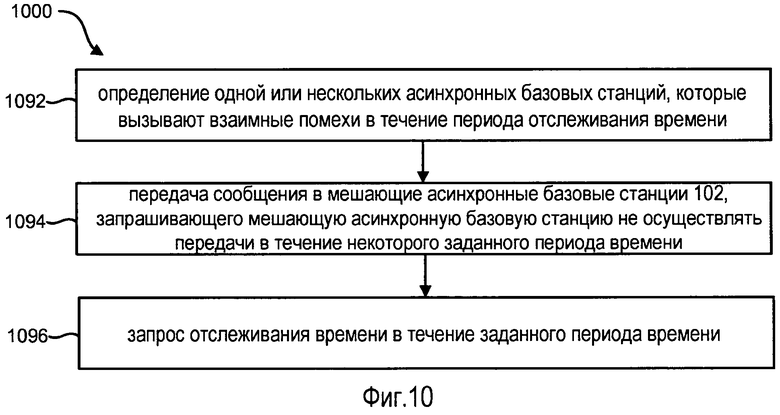
фиг.10 - блок-схема, иллюстрирующая способ 1000 глушения мешающих базовых станций,
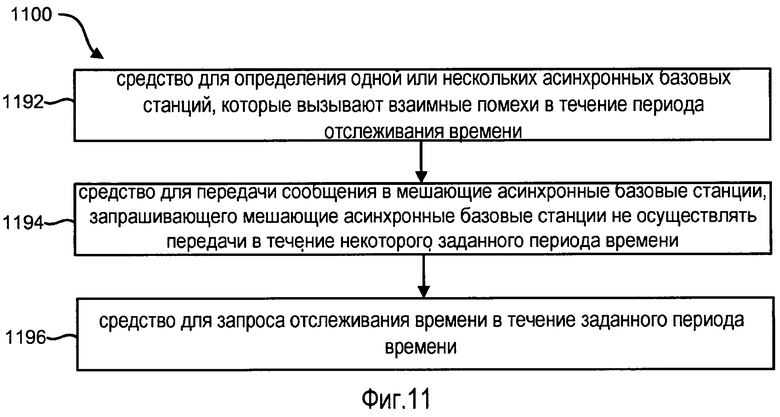
фиг.11 иллюстрирует блоки "средство плюс функция", соответствующие способу по фиг.10, и
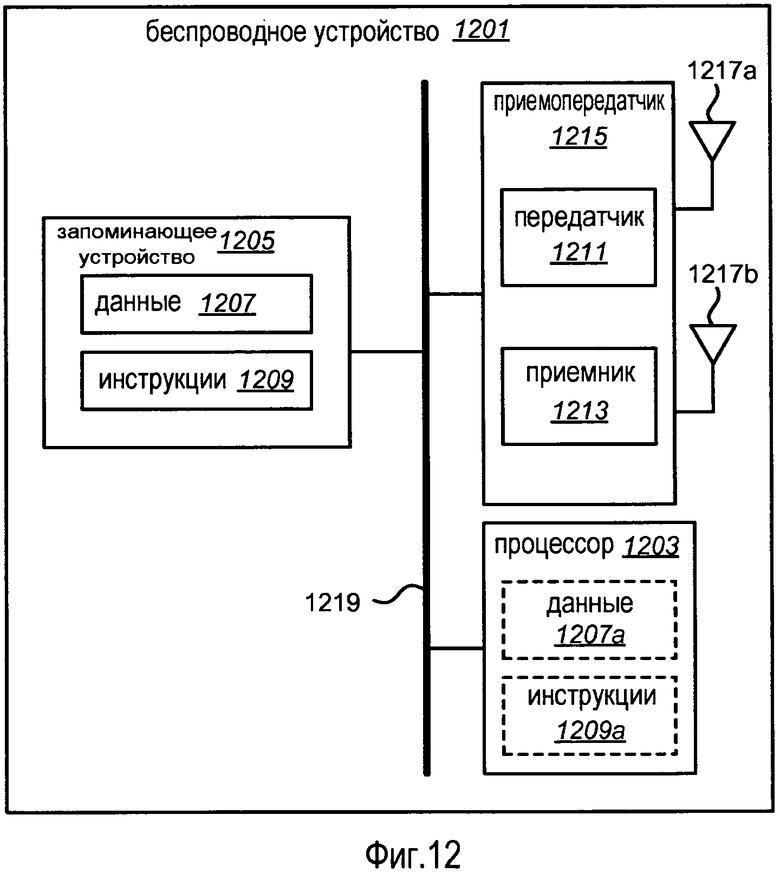
фиг.12 иллюстрирует некоторые компоненты, которые могут сходить в состав беспроводного устройства.
ПОДРОБНОЕ ОПИСАНИЕ
Раскрывается способ синхронизации системы беспроводной связи. Длительность паузы для базовой станции определяется на основе времени, требуемого для получения или поддержания синхронизации соседней базовой станцией. Все передачи из базовой станции приостанавливаются на протяжении длительности паузы.
Приостановка может происходить периодически в каждом периоде отслеживания в системе беспроводной связи. В одной конфигурации базовая станция является синхронной базовой станцией. Длительность паузы может быть дополнительно основана на уровне слоя синхронной базовой станции, который показывает число базовых станций между синхронной базовой станцией и узлом источника глобальной временной синхронизации, включая узел источника глобальной временной синхронизации. Длительность паузы может иметь длину n*T, где n представляет собой уровень слоя синхронной базовой станции и T представляет собой время, требуемое для получения или поддержания синхронизации соседней базовой станцией. Начальное время паузы для длительности паузы также может быть определено как время, когда период отслеживания (P) для системы беспроводной связи делится равномерно на глобальное время в масштабе сети. Глобальное время в масштабе сети может приниматься из соседней базовой станции или узла источника глобальной временной синхронизации.
В другой конфигурации базовая станция является асинхронной базовой станцией. Длительность паузы может быть дополнительно основана на максимальной ошибке между временем глобальной сети и оценочным сетевым временем и на полном числе уровней слоя в системе беспроводной связи. Начальное время паузы для длительности паузы может быть определено на основе оцененного времени в масштабе сети и на максимальной ошибке между глобальным временем в масштабе сети и оцененным временем в масштабе сети. Оцененное время в масштабе сети может приниматься с использованием протокола обратной связи, такого как протокол сетевого времени (NTP).
В другой конфигурации длительность паузы и начальное время паузы для длительности паузы может приниматься в сообщении обратной связи из соседней базовой станции. Базовой станцией могут быть пикобазовая станция, фемтобазовая станция, или домашний узел eNodeB. Может приниматься множество сигналов синхронизации и может использоваться сигнал синхронизации который обеспечивает наименьший уровень слоя. Если множество сигналов синхронизации обеспечивают одинаковый уровень слоя, то может быть использован сигнал с самым высоким отношением сигнала к помехам или сигнала к шуму (SINR). Интервалы длительности паузы могут быть следующими друг за другом или не следующими друг за другом.
Также раскрывается устройство для синхронизации системы беспроводной связи. Устройство включает в себя процессор и запоминающее устройство, находящееся в электронной связи с процессором. Выполняемые инструкции запоминаются в запоминающем устройстве. Инструкции являются выполняемыми для определения длительности паузы для некоторой базовой станции на основе времени, требуемого для получения или поддержки синхронизации соседней базовой станцией. Инструкции являются выполняемыми для приостановки всех передач из базовой станции на протяжении длительности паузы.
Также раскрывается устройство для синхронизации системы беспроводной связи. Устройство включает в себя средство для определения длительности паузы для некоторой базовой станции на основе времени, требуемого для получения или поддержки синхронизации соседней базовой станцией. Устройство включает в себя средство для приостановки всех передач из базовой станции на протяжении длительности паузы.
Также раскрывается компьютерный программный продукт для обеспечения поддержки многодиапазонного инструмента в аудиоплеере, который не поддерживает многодиапазонные инструменты. Компьютерный программный продукт содержит считываемый компьютером носитель, имеющий инструкции. Инструкции включают в себя код для определения длительности паузы для некоторой базовой станции на основе времени, требуемого для получения или поддержки синхронизации соседней базовой станцией. Инструкции также включают в себя код для приостановки всех передач из базовой станции на протяжении длительности паузы.
Фиг.1 - блок-схема, иллюстрирующая систему 100 беспроводной связи для синхронизации базовых станций 102, 104. Система 100 включает в себя синхронную базовую станцию 104 и источник 106 глобальной системы позиционирования (GPS). Синхронная базовая станция 104 устанавливает связь с контроллером 118 радиорадиосети (также упоминаемым как контроллер базовой станции или функция управления пакетами). Контроллер 118 радиосети устанавливает связь с центром 124 коммутации мобильной связи (MSC), узлом 120 обслуживания пакетной передачи данных (PDSN) или с функцией межсетевого взаимодействия (IWF), с коммутируемой телефонной сетью 126 общего пользования (PSTN) (обычно телефонная компания) и с сетью 122 интернет-протокола (IP) (обычно Интернет). Центр 124 коммутации мобильной связи является ответственным за координацию связи между устройством беспроводной связи и коммутируемой телефонной сетью 126 общего пользования, тогда как узел 120 обслуживания пакетной передачи данных является ответственным за маршрутизацию пакетов между устройством беспроводной связи и IP сетью 122.
Синхронизация среди базовых станций 104 в системе 100 беспроводной связи может принести много выгод, таких как способность регулировки помех или системы с множественным входом и множественным выходом (MIMO). Традиционно синхронизация системы 100 может быть достигнута с использованием приемников 112 глобальной системы позиционирования (GPS), совместных с базовой станцией 102, 104, то есть синхронная базовая станция 104 может включать в себя GPS приемник 112b. Однако GPS приемники 112 и/или GPS сигналы 108 не всегда доступны для целей синхронизации. Например, GPS приемники 112 могут не входить в состав базовой станции 102, 104 из соображений стоимости изготовления или ограничений мощности потребления. Здесь термин «синхронный» описывает базовую станцию 102, 104, которая способна точно отслеживать опорный синхросигнал, используемый в системе 100. Наоборот, термин «асинхронный» описывает базовую станцию 102, 104, которая не способна точно отслеживать опорный синхросигнал, используемый в системе 100. Дополнительно, базовая станция 104 может включать в себя GPS приемник 112b, но не иметь линии прямой видимости на GPS источник 106, например GPS спутник. В таких сценариях для синхронизации базовых станций могут быть использованы альтернативные стратегии синхронизации. Одним из примеров является гетерогенное развертывание в усовершенствованной системе долгосрочного развития (LTE-A) или усовершенствованной ультрамобильной широкополосной системе (UMB-A). В некоторых конфигурациях пикобазовые станции размещаются в дополнение к нормальным базовым станциям 104 для увеличения пропускной способности сети. Используемый здесь термин «пико» или «пикобазовая станция» относится к устройству, которое меньше и менее мощное, чем базовая станция 104, и которое способно устанавливать связь с беспроводными устройствами или системами 100 беспроводной связи. Подобным образом системы и способы настоящего изобретения также применимы к фемтоячейкам, также известным как фемтоузлы или домашние узлы eNodeB, или к базовым станциям точек доступа, где термин «фемто» или «фемтобазовая станция» относится к устройству, которое меньше и менее мощное, чем базовая станция 104, и которое способно устанавливать связь с беспроводными устройствами или системами 100 беспроводной связи. Другими словами, термины «пико» или «фемто» могут использоваться здесь взаимозаменяемо. Термин «макро» или «макробазовая станция» относится к традиционной базовой станции 104, которая больше и более мощная, чем пикобазовая станция 102.
В иллюстративных сетевых средах каждая фемтобазовая станция, также известная как фемтоузел, может соединяться с глобальной сетью (например, Интернет) и с базовой сетью оператора мобильной связи через маршрутизатор цифровой абонентской линии (DSL), кабельный модем, линию радиосвязи или другое средство сетевого соединения. Каждый фемтоузел может конфигурироваться для обслуживания ассоциированных беспроводных устройств, например таких, как терминалы доступа или абонентское оборудование, или, дополнительно, посторонние терминалы доступа. Другими словами, доступ к фемтоузлам может быть ограничен, в силу чего данный терминал доступа может обслуживаться несколькими назначенными (например, домашними) фемтоузлами, но не может обслуживаться какими-либо не назначенными фемто (например, домашними) узлами (например, фемтоузлом соседа). Собственник фемтоузла может подписаться на услуги мобильной связи, например такие, как 3G услуги мобильной связи, через базовую сеть оператора мобильной связи. В дополнение, терминал доступа способен функционировать как в макросредах, так и в сетевых средах меньшего масштаба (например, связанных с местом жительства). Другими словами, в зависимости от текущего местоположения терминала доступа терминал доступа может обслуживаться каким-нибудь узлом доступа сети мобильной связи макроячейки или любым из набора фемтоузлов (например, фемтоузлов, и тех, которые находятся в соответствующем месте проживания пользователя). Например, когда абонент находится вне своего дома, он обслуживается макроузлом доступа, а когда абонент находится дома, он обслуживается фемтоузлом. Здесь должно быть понятно, что фемтоузел может быть обратно совместимым с существующими терминалами доступа.
Фемтобазовая станция или фемтоузел могут развертываться на одной частоте или, альтернативно, на многих частотах. В зависимости от конкретной конфигурации одна частота или одна или несколько из многих частот могут перекрываться с одной или несколькими частотами, используемыми макробазовыми станциями. В некоторых аспектах терминалы доступа могут конфигурироваться, чтобы подсоединяться к предпочтительному фемтоузлу (например, домашний фемтоузел терминала доступа), когда такая способность к соединению возможна. Например, когда терминал доступа находится внутри места проживания пользователя, может быть желательным, чтобы терминал доступа осуществлял связь только с домашним фемтоузлом.
Фемтоузел может ограничиваться в некоторых аспектах. Например, данный фемтоузел может обеспечить только некоторые услуги некоторым терминалам доступа. В развертываниях с так называемой ограниченной (или закрытой) ассоциацией данный терминал доступа может обслуживаться только мобильной сетью макроячеек и определенным набором фемтоузлов (например, фемтоузлов, которые находятся внутри места проживания соответствующего пользователя). В некоторых вариантах осуществления некоторый узел может быть ограничен условием не обеспечивать, по меньшей мере, один узел, по меньшей мере, одним из сигнализации, доступа к данным, регистрации, персонального поискового вызова или услуги.
Как показано на фиг.1, пикобазовые станции 102 могут располагаться внутри помещений. Следовательно, пикобазовая станция 102a может включать в себя GPS приемник 112a, но может быть неспособна принимать GPS сигнал 108. Альтернативно, пикобазовая станция 102a может не включать в себя GPS приемник 112a. Не-GPS пикобазовые станции 102a могут использовать синхросигнал 110 из GPS базовой станции 104 или из GPS-вторичной базовой станции 104 (то есть они способны отслеживать синхросигнал 110 GPS базовой станции) для согласования по времени. Синхросигналы 110 могут передаваться по беспроводной связи или проводной связи, например, одна пикобазовая станция 102a может принимать синхросигнал 110a беспроводной связи, тогда как другая пикобазовая станция 102a может принимать синхросигнал 102b проводной связи. Когда не-GPS пикобазовые станции 102a способны прослушивать соседнюю GPS базовую станцию 104 или GPS-вторичные базовые станции, может быть установлена многоуровневая иерархия синхронизации.
Однако помехи 114 сигнала могут быть главным ограничивающим фактором в незапланированном развертывании. Вредные помехи 114 могут затруднять способность не-GPS пикобазовой станции 102 прослушивать полезный синхросигнал 110 беспроводным способом. Это может быть особенно справедливым в случаях гетерогенного развертывания, где пикобазовые станции 102 могут не иметь хорошей геометрии и могут подавлять другие соседние пикобазовые станции 102. Другими словами, две асинхронные пикобазовые станции 102 могут создавать помехи друг другу и могут препятствовать взаимной синхронизации с синхронной базовой станцией 104; то есть две близлежащие асинхронные пикобазовые станции 102 могут создать настолько большие помехи 114 друг другу, что ни одна из них не может принимать синхросигнал 110 с хорошим отношением сигнала к помехам (SIR) из синхронной базовой станции 104. Подобным образом сигналы 110 синхронизации на пикобазовых станциях 102 могут создавать помехи друг другу, так что пикобазовая станция 102 может быть неспособна использовать любой из них.
Следовательно, пикобазовые станции 102 могут включать в себя модули 116a-b паузы, которые позволяют пикобазовым станциям 102 достигать синхронизации с использованием паузы, координированной в масштабе сети. Альтернативно, или дополнительно, модули 116a-b паузы могут находиться в фемтобазовой станции, то есть домашнем узле или ретрансляторе. Хотя модули 116 паузы иллюстрируются только на пикобазовых станциях 102, для достижения синхронизации макробазовые станции 104 также могут использовать методы, описанные здесь. Модуль 116 паузы может функционировать с использованием иерархической информации или сообщений, посылаемых из других базовых станций 102, 104.
Системы и способы настоящего изобретения могут быть использованы базовыми станциями 102, 104 для начального входа в синхронизм (для этого может быть использован способ асинхронного согласования по времени), а также для поддержания этого синхронизма (для этого может быть использован синхронный способ). Например, задающие генераторы (осцилляторы) на пикобазовых станциях 102 и фемтобазовых станциях могут быть невысокого качества. Следовательно, пикобазовые станции 102 и фемтобазовые станции должны периодически отслеживать синхросигналы 110.
В одной конфигурации модули 116 паузы используют иерархическую информацию, чтобы периодически заглушать базовые станции 102, 104, основываясь на их уровне слоя в системе 100 и на их статусе синхронизации. Здесь термин «уровень слоя» или «слой» для пикобазовой станции 102 относится к наименьшему числу промежуточных синхронных узлов между пикобазовой станцией 102 и GPS источником 106, включая узел GPS источника 106. Например, уровень слоя иллюстрируемых пикобазовых станций 102 равен двум, тогда как уровень слоя иллюстрируемых синхронных базовых станций 104 равен одному. Основываясь на уровне слоя, пикобазовые станции 102 в системе могут оставаться заглушенными на период времени, достаточно длинный для того, чтобы позволить синхронизироваться базовым станциям 102, 104 с таким же или более низким уровнем слоя. Другими словами, синхронные пикобазовые станции 102 с низким уровнем слоя могут оставаться заглушенными (то есть воздерживаться от передачи любых данных) на более короткий период времени, чем синхронные пикобазовые станции 102 с высоким уровнем слоя. Для эффективности длительности паузы для различных уровней слоя могут вычисляться и сохраняться. Дополнительно, списки интервалов паузы для каждого уровня слоя могут быть заданы конкретным стандартом (например, 3GPP) или могут обеспечиваться объектом конфигурации. Периоды паузы могут быть основаны на реальном времени глобальной сети, которое действует как время глобальной сети, например всемирное скоординированное время (UTC). Хотя нижеприведенные системы и способы настоящего изобретения описаны с использованием UTC времени, можно использовать любой подходящий стандарт времени глобальной сети.
Однако асинхронная пикобазовая станция 102 может не иметь информации о реальном глобальном времени, например, она не имеет GPS приемника 112 или не может принимать GPS сигнал 108, потому что она находится в помещении. Следовательно, модуль 116 паузы может использовать оцененное глобальное время или оцененное время в масштабе сети, чтобы определять начальное время паузы и длительность паузы, например, с использованием протокола сетевого времени (NTP). Поскольку модуль 116 паузы может полагаться на оцененное глобальное время, то, когда заглушена асинхронная пикобазовая станция 102, длительность паузы может быть больше для асинхронной пикобазовой станции 102, чем для синхронной пикобазовой станции 102.
Для глушения мешающих пикобазовых станций 102 модуль 116 паузы может альтернативно использовать основанную на сообщении конфигурацию, а не периодическую паузу. В основанной на сообщении конфигурации модуль 116 паузы может обнаруживать мешающие пикобазовые станции 102 и посылать сообщение в мешающие пикобазовые станции 102, запрашивая их установить паузу на заданный период времени. Во время периода паузы запрашивающая базовая станция 102, 104 может получать информацию согласования по времени, например UTC времени.
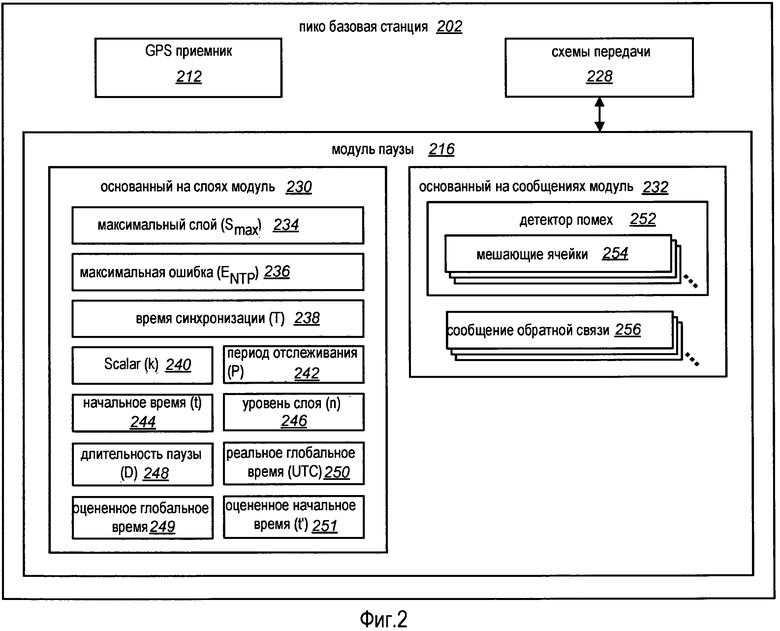
Фиг. 2 - блок схема, иллюстрирующая пикобазовую станцию 202 с модулем 216 паузы. Пикобазовая станция 202 включает в себя GPS приемник 212, хотя он может быть не способен принимать GPS сигнал 108. Если пикобазовая станция 202 является несинхронизированной либо от GPS сигнала 108, либо от другой синхронной базовой станции 104, пикобазовая станция 202 может создавать помехи своими передачами. Следовательно, модуль 216 паузы может определять, когда пикобазовая станция 202 должна быть заглушена, и управлять схемами 228 передачи соответственно. Другими словами, модуль 216 паузы может посылать управляющие сообщения, которые приостанавливают все передачи из пикобазовой станции 202, основываясь на алгоритме на основе слоев или алгоритме на основе сообщения.
Основанный на слоях модуль 230 определяет периодические паузы для пикобазовой станции 202. Если пикобазовая станция 202 является синхронной, то пикобазовая станция 202 может иметь реальное глобальное время 250, например всемирное скоординированное время (UTC) 250. Длительность паузы для синхронной пикобазовой станции 202 может зависеть от уровня слоя (n) 246. Интервал паузы может быть синхронизирован с началом в начальное время (t) 244, когда период отслеживания (P) 242 делится поровну на UTC время 250, то есть UTC по модулю P=0. Период отслеживания (P) 242 представляет собой длительность периода времени между событиями синхронизации, например 2 секунды. Длительность паузы (D) 248 для синхронной пикобазовой станции 202 на слое n 246 может быть равна nT, где время синхронизации (T) 238 представляет собой время, требуемое для достижения синхронизации, то есть D=nT.
Поскольку асинхронная пикобазовая станция 202 может не иметь доступа к UTC времени 250, асинхронные пикобазовые станции 202 могут определять начальное время (t) 244 периодической паузы с использованием протокола сетевого времени (NTP). Используя NTP протокол, пикобазовая станция 202 может принимать оцененное глобальное время 249 из NTP сервера с использованием последовательности NTP сообщений. Тогда начальное время (t) 244 интервалов паузы может зависеть от точности оцененного глобального времени. Если ENTP 236 представляет собой максимальную ошибку между UTC временем и оцененным глобальным временем 249, то асинхронная пикобазовая станция 202 может оставаться заглушенной на протяжении длительности (D) паузы 248, равной 2*ENTP+Smax*T, где Smax 234 представляет собой максимальный слой в системе 100 беспроводной связи, а время синхронизации (T) 238 представляет собой время, требуемое для достижения синхронизации. Начальное время (t) 244 для асинхронной пикобазовой станции 202 может наступать, когда масштабированный период отслеживания (kP) делится поровну на (t+ENTP) (то есть (t+ENTP) по модулю kP=0), где k 240 представляет собой скаляр, который больше или равен 1. Другими словами, асинхронная пикобазовая станция 202 может оценивать синхронное начальное время (t') 251, в которое UTC по модулю P=0 с использованием оцененного глобального времени 249 вместо использования UTC времени 250. Тогда для учета систематической ошибки в оцененном глобальном времени 249 асинхронная пикобазовая станция 202 может заглушаться на время ENTP перед или после оценочного начального времени (t') 251 плюс Smax*T.
Для пикобазовых станций 102, пытающихся синхронизироваться от другой базовой станции 104 на слое n, основанный на слоях модуль 230 может уменьшить число мешающих базовых станций 102, 104 до числа базовых станций 102, 104 с уровнем 246 слоя, меньшим или равным n, а также асинхронных базовых станций 104.
После инициализации асинхронная пикобазовая станция 202 может не осуществлять передачи на протяжении многих периодов паузы и может пытаться выполнить синхронизацию. Если ей не удается достичь синхронизации, то она может использовать NTP оцененное глобальное время 249 для выполнения паузы и попытки получить синхронизацию. Время ENTP 236 может быть ограничено половиной времени прохождения в оба конца NTP измерения, например, если время прохождения в оба конца до NTP сервера составляет 100 миллисекунд, то ENTP 236 меньше или равно 50 мс.
Пикобазовые станции 202, которые могут принимать множество синхросигналов 110, могут использовать тот, который обеспечивает их наименьшим уровнем 246 слоя. Если многие пикобазовые станции 202 или макробазовые станции 104 обеспечивают одинаковый уровень 246 слоя, то может быть выбран таковой с самым высоким отношением сигнала к помехам и шуму (SINR).
Как обсуждалось выше, пикобазовые станции 202, которые могут иметь доступ к GPS сигналу 108, могут входить в синхронизм от других макробазовых станций 104 или пикобазовых станций 202, которые имеют доступ более высокого слоя к согласованию по времени, то есть более низкий уровень 246 слоя. Такое вхождение в синхронизм и отслеживание могут подвергаться помехам 114 со стороны окружающих ячеек. Скоординированная пауза, используемая, например, основанным на слоях модулем 230, может быть использована для снижения таких помех при временном слежении. Асинхронные пикобазовые станции 202 могут не иметь реального глобального времени UTC 250 и, следовательно, могут не знать с достаточной точностью, когда нужно делать паузу. В некоторых случаях опора на менее точную информацию согласования по времени для паузы может привести к консервативному глушению асинхронных пикобазовых станций 202. Если асинхронные пикобазовые станции 202 продолжают осуществлять передачи, то ранее синхронизированные базовые станции 102, 104 вокруг них не смогут отслеживать время из их соответствующего источника, создавая еще больше асинхронных базовых станций, и т.д. Другими словами, одна асинхронная пикобазовая станция 202 может расстроить синхронизацию других базовых станций 102, 104. Это может привести к неуправляемой реакции, где все больше и больше базовых станций 102, 104 становятся асинхронными, вызывая потерю синхронизации еще большего числа базовых станций 102, 104, приводя к неэффективности.
Следовательно, в дополнение к основанному на слоях модулю 230 модуль 216 паузы альтернативно может использовать основанный на сообщениях модуль 232 для глушения мешающих базовых станций 102, 104. Синхронные пикобазовые станции 202 могут обнаруживать помехи от мешающей асинхронной ячейки 254 в течение периода отслеживания времени с использованием детектора 252 помех. Затем пикобазовая станция 202 может посылать сообщение 256 обратной связи в мешающую ячейку 254, запрашивая мешающую ячейку 254 сохранять паузу на некоторый период времени. Длительность паузы может быть специфицирована в сообщении 256 обратной связи или предварительно определяться для всех интервалов паузы. Начальное время для интервала молчания может быть специфицировано в сообщении 256 обратной связи или соответствовать моменту приема мешающей базовой станцией 254 сообщения 256 обратной связи. Это позволяет запрашивающей пикобазовой станции 202 получить отслеживание времени. Асинхронные пикобазовые станции 202, которые не вызывают неприемлемых помех на других синхронных базовых станциях 102, 104, могут не принимать запросы сделать паузу и, следовательно, могут продолжать передачу. Это может предотвратить периодическое глушение всех асинхронных базовых станций 102, 104 на относительно длительные периоды, в то же время позволяя синхронным базовым станциям 102, 104 выдерживать ритм.
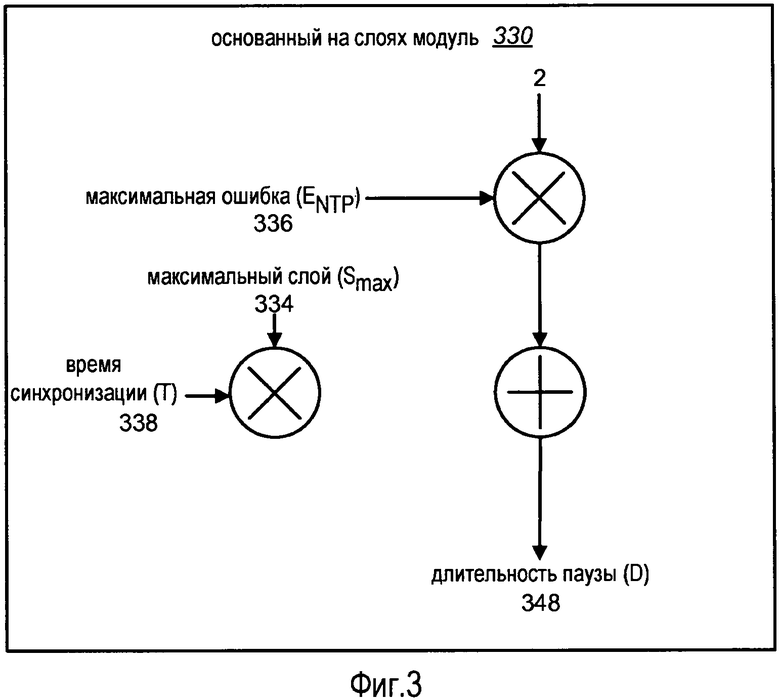
Фиг. 3 - блок-схема, иллюстрирующая основанный на слоях модуль 330, который может находиться в пикобазовой станции 102. Иллюстрируемая конфигурация показывает длительность (D) 348, вычисляемую для асинхронной пикобазовой станции 102. Во-первых, максимальная ошибка (ENTP) 336 может умножаться на 2. Максимальная ошибка (ENTP) 336 может быть максимальной ошибкой между оцененным NTP глобальным временем 349 и реальным глобальным временем, например UTC временем 250. Максимальный слой (Smax) 334 может умножаться на время синхронизации (T) 338. Максимальный слой (Smax) 334 представляет собой максимальный слой или несколько иерархических уровней в системе 100 беспроводной связи, и время синхронизации (T) 338 представляет собой время, требуемое для достижения синхронизации в пикобазовой станции 102. Тогда длительность (D) 348 может быть вычислена как D=2*ENTP+Smax*T.
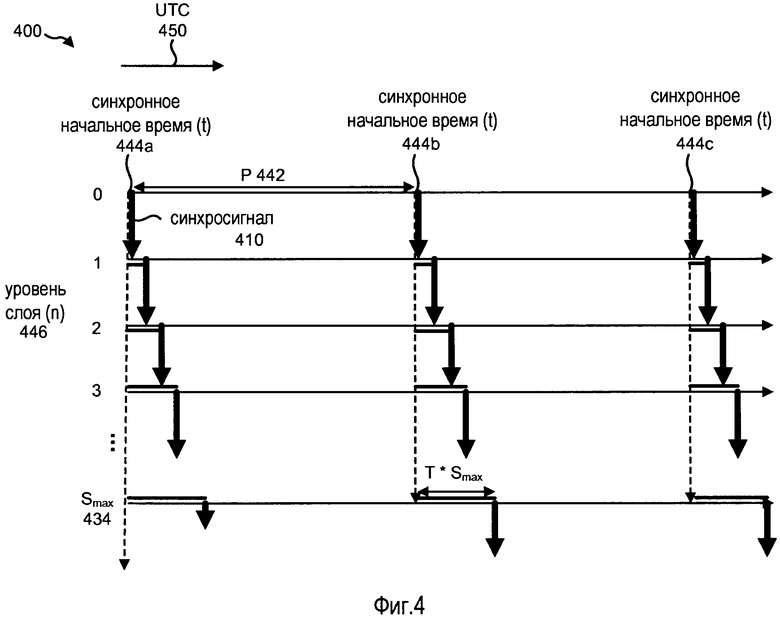
Фиг. 4 - диаграмма 400 последовательности, иллюстрирующая систему 100 беспроводной связи для синхронизации базовых станций 102, 104 с использованием следующих друг за другом интервалов паузы. А именно диаграмма 400 последовательности иллюстрирует события синхронизации как функцию реального глобального времени (например, UTC 450), где жирные вертикальные стрелки представляют синхросигналы 410 из одного уровня 446 слоя на другой. Каждый уровень слоя (n) 446 включает в себя одну или несколько пикобазовых станций 102 или макробазовых станций 104. Уровень слоя (n) 446 пикобазовой станции 202 может быть выведен из интервала, в котором она принимает синхросигнал 410. Например, если слой 1 базовых станций 104 находится в паузе на субкадре 1, слой 2 базовых станций 102 находится в паузе на субкадрах 1 и 2, то если новая базовая станция 104 видит сигнал на субкадре 2, то она знает, что она получает этот синхросигнал 410 из базовой станции 104 слоя 1. Следовательно, новая базовая станция 104 представляет собой слой 2.
Пунктирные вертикальные стрелки представляют синхронные начальные времена (t) 444a-c, в которые синхронные пикобазовые станции 102 могут начать интервал паузы, а горизонтальные черточки представляют собой длительность интервала паузы, то есть число субкадров паузы для базовых станций 102, 104 на каждом слое 446. Как иллюстрируется на фиг.4, интервалы паузы могут быть следующими друг за другом. Синхронные начальные времена (t) 444a-c могут наступать, когда период отслеживания (P) 442 делится поровну на UTC время 450, то есть UTC по модулю P = 0. Например, если период P 442 равен двум секундам, то синхронное начальное время может наступать каждые две секунды, основываясь на UTC времени 450. Длительность (D) 248 интервала паузы зависит от уровня слоя (n) 446. Например, пикобазовые станции 102 на уровне слоя один сохраняют паузу в течение одного периода синхронного времени (T), пикобазовые станции 102 на уровне слоя два сохраняют паузу в течение двух периодов синхронного времени (T), пикобазовые станции 102 на уровне слоя три сохраняют паузу в течение трех периодов синхронного времени (T). Подобным образом, пикобазовые станции 102 на максимальном уровне слоя Smax 434 сохраняют паузу в течение Smax периодов синхронного времени (T). Следовательно, каждая синхронная базовая станция 102, 104 может сохранять паузу достаточно долго для всех базовых станций 102, 104 с более низким уровнем слоя 446, чтобы достичь синхронизации.
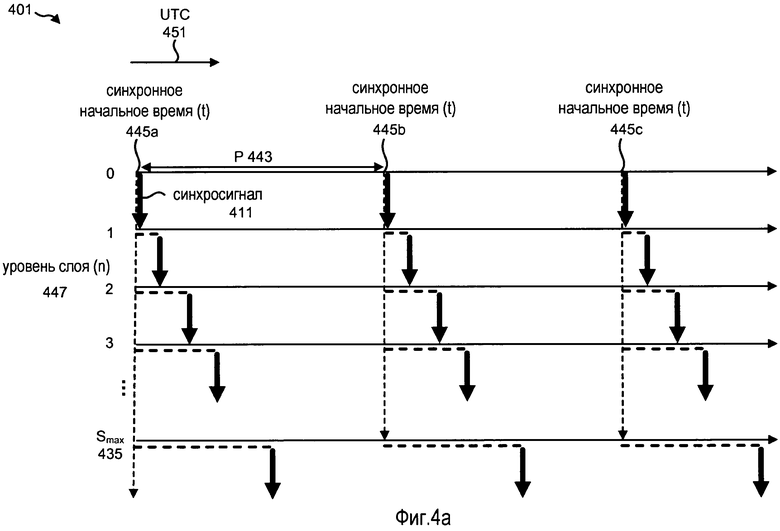
Фиг. 4а - диаграмма 401 последовательности, иллюстрирующая систему 100 беспроводной связи для синхронизации базовых станций 102, 104 с использованием не следующих друг за другом интервалов паузы. Реальное глобальное время (например, UTC 451), синхронные начальные времена (t) 445a-c, синхросигналы 411, период отслеживания (P) 443, уровень слоя (n) 447 и максимальный слой Smax 434, иллюстрируемые на фиг.4а, могут действовать так же, как реальное глобальное время (например, UTC 450), синхронные начальные времена (t) 444a-c, синхросигналы 410, период отслеживания (P) 442, уровень слоя (n) 446 и максимальный слой Smax 434, иллюстрируемые на фиг.4.
Однако на фиг.4а интервалы паузы могут быть не следующими друг за другом. Например, если период времени синхронизации (T) равен 2 мс, то синхронные пикобазовые станции 102 на уровне слоя (n) один могут начинать паузу между 3-4 мс и 7-8 мс, таким образом сохраняя паузу в целом в течение 2 мс. Синхронные пикобазовые станции 102 на уровне слоя (n) два могут начинать паузу между 3-4 мс, 7-8 мс, 11-12 мс и 15-16 мс, таким образом сохраняя паузу в целом в течение 4 мс. Подобным образом синхронные пикобазовые станции 102 на максимальном уровне слоя Smax 435 могут сохранять паузу в течение времени, эквивалентного Smax периодов времени синхронизации (T), хотя интервал паузы может быть не следующим друг за другом.
Фиг. 5 - блок-схема, иллюстрирующая способ 500 глушения синхронной базовой станции 102, 104. Способ может выполняться модулем 116 паузы в пикобазовой станции 102 или в макробазовой станции 104. На этапе 564 модуль 116 паузы принимает реальное глобальное время, например UTC 450. Время принимается на этапе 564 из GPS сигнала 108 или синхросигнала 110 из другой базовой станции 102, 104. На этапе 566 модуль 116 паузы определяет длительность паузы (D) 248 для синхронной базовой станции 102 на основе уровня 246 слоя базовой станции 102, который показывает число базовых станций 102, 104 между синхронной базовой станцией 102, 104 и узлом 106 GPS источника, например D=nT. Также на этапе 568 модуль 116 паузы определяет синхронное начальное время 444 паузы, основываясь на реальном глобальном времени 450 и периоде отслеживания (P) 442 для системы 100 беспроводной связи, например, синхронные начальные времена 444 могут наступать, когда UTC по модулю P=0. На этапе 570 модуль 116 паузы также периодически приостанавливает все передачи из синхронной базовой станции 102, 104 в течение длительности паузы (D) 248, начинающейся в синхронное начальное время 244 паузы.
Вышеописанный способ по фиг.5 может быть выполнен посредством различных компонентов аппаратных средств, и/или программного обеспечения, и/или модулей, соответствующих блокам 600 "средство плюс функция", иллюстрируемым на фиг.6. Другими словами, блоки 564-570, иллюстрируемые на фиг.5, соответствуют блокам 664-670 "средство плюс функция", иллюстрируемым на фиг.6.
Фиг.7 - другая диаграмма 700 последовательности, иллюстрирующая систему 100 беспроводной связи для синхронизации базовых станций 102, 104. Однако диаграмма 700 последовательности иллюстрирует периодическое глушение для асинхронных базовых станций 102, 104. Диаграмма 700 последовательности иллюстрирует события синхронизации как функцию реального глобального времени (например, UTC 750), где жирные вертикальные стрелки представляют синхросигналы 710 из одной базовой станции 102, 104 в другую. Как обсуждалось выше, асинхронные пикобазовые станции 102 могут быть неспособны принимать UTC время 750 по многим причинам. В таких конфигурациях пикобазовая станция 102 может принимать время 249 глобальной сети с использованием NTP протокола. Как ранее, пунктирные вертикальные стрелки представляют синхронные начальные времена (t) 744a-c, в которые синхронные пикобазовые станции 102 могут начать интервал паузы, а горизонтальные черточки представляют собой длительность интервала паузы.
Синхронные начальные времена (t) 744a-c могут быть основаны на UTC 750. Наоборот, асинхронные начальные времена (t) 758a-b могут быть основаны на NTP оцененном глобальном времени 249. Следовательно, ошибка между NTP оцененным глобальным временем 249 и UTC 750 может быть учтена для использования максимальной ошибки ENTP 736. А именно асинхронные начальные времена (t) 758a-b могут наступать, когда модуль (t+ENTP, kP)=0, где k представляет собой скаляр, который больше или равен 1. Другими словами, асинхронная пикобазовая станция A1 760a может вычислять оцененное начальное время (t') 751a с использованием NTP оцененного глобального времени 249. Однако для учета систематической ошибки в NTP оцененном глобальном времени 249 реальное асинхронное начальное время 758a может быть смещено на ENTP 736. Подобным образом асинхронная пикобазовая станция A2 760b может вычислять оцененное начальное время (t') 751b с использованием NTP оцененного глобального времени 249. Однако для учета с ошибки в NTP оцененном глобальном времени 249 реальное асинхронное начальное время 758b может быть смещено на ENTP 736. Длительность паузы для асинхронной пикобазовой станции 102 может быть равна 2*ENTP+Smax*T.
В одной конфигурации ENTP 736 больше, чем Smax, так что для асинхронной пикобазовой станции 102 может потребоваться, чтобы длительность паузы была намного больше, чем для синхронной пикобазовой станции 102. Например, если период времени синхронизации (T) равен 2 мс, система 100 имеет два уровня и ENTP 736 составляет 50 мс, максимальная длительность интервала паузы для синхронной пикобазовой станции 102 должна составлять 4 мс, тогда как длительность интервала паузы для асинхронной пикобазовой станции 102 должна составлять 104 мс.
На фиг. 8 показана блок-схема способа 800 глушения асинхронной базовой станции 102, 104. Способ 800 может выполняться модулем 116 паузы в пикобазовой станции 102 или в макробазовой станции 104. Поскольку асинхронная базовая станция 102, 104 может не иметь доступа к реальному глобальному времени, например UTC 750, то на этапе 872 модуль 116 паузы принимает оцененное глобальное время 249, например, через NTP протокол. Затем на этапе 874 модуль 116 паузы определяет длительность паузы (D) 248 для асинхронной базовой станции 102 на основе максимальной ошибки ENTP 736 между реальным глобальным временем UTC 750 и NTP оцененным глобальным временем 249. В одной конфигурации длительность паузы (D) 248 для асинхронного интервала согласования по времени составляет 2*ENTP + Smax*T, где максимальный слой (Smax) 234 представляет собой максимальный слой или несколько иерархических уровней в системе 100 беспроводной связи, и время синхронизации (T) 238 представляет собой время, требуемое для достижения синхронизации в базовой станции 102, 104. Также на этапе 876 модуль 116 паузы определяет асинхронное начальное время 758 паузы, основываясь на максимальной ошибке ENTP 736 между реальным глобальным временем UTC 750 и оцененным глобальным временем 249. Другими словами, асинхронная базовая станция 102, 104 может оценивать синхронное начальное время (t') 751, в которое UTC по модулю P=0 с использованием NTP оцененного глобального времени 249 вместо использования UTC времени 250. Тогда для учета систематической ошибки в NTP оцененном глобальном времени 249 асинхронная базовая станция 102 может заглушаться на время ENTP перед или после оцененного начального времени (t') 251 плюс Smax*T. На этапе 878 модуль 116 паузы также периодически приостанавливает все передачи из асинхронной базовой станции 102 в течение длительности паузы (D) 248, начинающейся в асинхронное начальное время 758.
Вышеописанный способ по фиг.8 может быть выполнен посредством различных компонентов аппаратных средств, и/или программного обеспечения, и/или модулей, соответствующих блокам 900 "средство плюс функция", иллюстрируемым на фиг.9. Другими словами, блоки 872-878, иллюстрируемые на фиг.8, соответствуют блокам 972-978 "средство плюс функция", иллюстрируемым на фиг.9.
Фиг.10 - блок-схема способа 1000 глушения мешающих базовых станций 102, 104. Способ 1000 может выполняться основанным на сообщениях модулем 232, находящимся в модуле 116 паузы либо в пикобазовой станции 102, либо в макробазовой станции 104. На этапе 1092 модуль 116 паузы определяет одну или несколько асинхронных базовых станций 102, 104, которые вызывают взаимные помехи в течение периода отслеживания времени. Основанный на сообщениях модуль 232 на этапе 1094 посылает сообщение в мешающие асинхронные базовые станции 102, запрашивая мешающую асинхронную базовую станцию 102, 104 не осуществлять передачи в течение некоторого периода времени, например интервала паузы. Длительность интервала паузы может быть временем, требуемым для отправления сообщения базовой станции 104, чтобы она выполнила синхронизацию, причем сообщение может заключаться в сообщении обратной связи. Начальное время интервала паузы также может быть послано в сообщении или может наступать, как только мешающая базовая станция 102, 104 принимает сообщение обратной связи. На этапе 1096 основанный на сообщениях модуль 216 также может получать временное слежение в течение заданного периода времени. Дополнительно, сообщение обратной связи может включать в себя NTP ошибку оценки.
Вышеописанный способ 1000 по фиг.10 может быть выполнен посредством различных компонентов аппаратных средств, и/или программного обеспечения, и/или модулей, соответствующих блокам 1100 "средство плюс функция", иллюстрируемым на фиг.11. Другими словами, блоки 1092-1096, иллюстрируемые на фиг.10, соответствуют блокам 1192-1196 "средство плюс функция", иллюстрируемым на фиг.11.
Фиг.12 иллюстрирует некоторые компоненты, которые могут входить в состав беспроводного устройства 1201. Беспроводное устройство 1201 представляет собой пикобазовую станцию 102 или макробазовую станцию 104.
Беспроводное устройство 1201 включает в себя процессор 1203. Процессором 1203 может быть процессор общего назначения одно- или многокристальный микропроцессор (например, ARM), микропроцессор специального назначения (например, процессор цифровой обработки сигналов (DSP)), микроконтроллер, программируемые вентильные матрицы и т.д. Процессор 1203 может упоминаться как центральный процессор (CPU). Хотя в беспроводном устройстве 1201 по фиг.12 показан одиночный процессор 1203, в альтернативной конфигурации может быть использована комбинация процессоров (например, ARM и DSP).
Беспроводное устройство 1201 также включает в себя запоминающее устройство 1205. Запоминающее устройство 1205 может быть любым электронным компонентом, способным сохранять электронную информацию. Запоминающее устройство 1205 может быть реализовано как запоминающее устройство с произвольной выборкой (RAM), постоянное запоминающее устройство (RO), накопитель на магнитных дисках, оптические запоминающее устройства на дисках, устройства флэш-памяти в RAM запоминающем устройстве, запоминающее устройство на одной плате с процессором, стираемое программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), регистры или любая другая форма носителя данных, включая их комбинации.
Данные 1207 и инструкции 1209 могут сохраняться в запоминающем устройстве 1205. Инструкции 1209 являются выполняемыми процессором 1203 для осуществления описанных здесь способов. Выполнение инструкций может 1209 включать в себя использование данных 1207, которые сохраняются в запоминающем устройстве 1205. Когда процессор 1203 выполняет инструкции 1207, в процессор 1203 могут загружаться различные части инструкций 1209a и различные части данных 1207a.
Беспроводное устройство 1201 также включает в себя передатчик 1211 и приемник 1213, чтобы обеспечить возможность передачи и приема сигналов между беспроводным устройством 1201 и удаленным местоположением. Передатчик 1211 и приемник 1213 могут коллективно упоминаться как приемопередатчик 1215. Антенна 1217 может быть электрически соединена с приемопередатчиком 1215. Беспроводное устройство 1201 также включает в себя (не показаны) многочисленные передатчики, многочисленные приемники, многочисленные приемопередатчики и/или многочисленные антенны.
Различные компоненты беспроводного устройства 1201 могут соединяться между собой посредством одной или нескольких шин, которые включают в себя шину питания, шину управляющих сигналов, шину сигнала индикации состояния, шину данных и т.д. Для ясности, различные шины иллюстрируются на фиг.12 в виде системы 1219 шин.
В вышеприведенном описании ссылочные позиции иногда используются в связи с различными терминами. Там где термин используется в связи со ссылочной позицией, подразумевается, что она относится к конкретному элементу, показанному на одном или более чертежах. Там где термин используется без ссылочной позиции, подразумевается, что он относится вообще к термину без ограничения какой-то конкретной фигурой.
Термин «определение» охватывает широкое разнообразие действий, и следовательно, «определение» может включать в себя вычисление, вычислительную обработку данных, обработку, выведение, исследование, поиск (например, поиск в таблице, в базе данных или в другой структуре данных), выяснение и т.п. Также «определение» может включать в себя прием (например, информацию приема), доступ (например, доступ к данным в памяти) и т.п. Также «определение» может включать в себя решение, выбор, учреждение и т.п.
Фраза «основываясь на» не означает «основываясь только на», если специально не оговорено по-другому. Другими словами, фраза «основываясь на» описывает как «основываясь только на», так и «основываясь, по меньшей мере, на».
Термин «процессор» должен интерпретироваться широко, охватывая процессор общего назначения, центральный процессор (CPU), микропроцессор, процессор цифровой обработки сигналов (DSP), контроллер, микроконтроллер, конечный автомат и т.п. При некоторых обстоятельствах «процессор» может упоминаться как специализированная интегральная схема (ASIC), программируемое логическое устройство (PLD), программируемая вентильная матрица (FPGA) и т.п. Термин «процессор» также может относиться к комбинации устройств обработки, например комбинации DSP процессора и микропроцессора, множества микропроцессоров, одного или нескольких микропроцессоров в сочетании с ядром DSP процессора, или любой другой подобной конфигурации.
Термин «запоминающее устройство» должен интерпретироваться широко, охватывая любой электронный компонент, способный сохранять электронную информацию. Термин «запоминающее устройство» относится к различным типам считываемых процессором носителей, таких как запоминающее устройство с произвольной выборкой (RAM), постоянное запоминающее устройство (ROM), энергонезависимое запоминающее устройство с произвольной выборкой (NVRAM), программируемое постоянное запоминающее устройство (PROM), стираемое программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), флэш-память, магнитные или оптические носителя данных, регистры и т.п. Говорят, что запоминающее устройство находится в электронной связи с процессором, если процессор может считывать информацию из запоминающего устройства и/или записывать информацию на него. Запоминающее устройство, которое является интегральным с процессором, находится в электронной связи с процессором.
Термины «инструкции» и «код» должны интерпретироваться широко, включая любой тип считываемых компьютером операторов. Например, термины «инструкции» и «код» могут относиться к одной или нескольким программам, стандартным программам, подпрограммам, функциям, процедурам и т.п. «Инструкции» и «код» могут содержать один считываемый компьютером оператор или много считываемых компьютером операторов.
Описанные здесь функции могут сохраняться в виде одной или нескольких инструкций на считываемых компьютером носителях. Термин «считываемый компьютером носитель» относится к любому доступному носителю, к которому можно получить доступ с помощью компьютера. Например, считываемый компьютером носитель включают в себя запоминающее устройство с произвольной выборкой (RAM), постоянное запоминающее устройство (ROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), постоянное запоминающее устройство на компакт-диске (CD-ROM) или другой накопитель на оптическом диске, накопитель на магнитных дисках или другое магнитное устройство хранения данных, или любой другой носитель, который может быть использован для сохранения требуемого программного кода в форме инструкций или структур данных и к которому можно получить доступ с помощью компьютера. Диск или диски, упоминаемые здесь, включают в себя компакт диск (CD), лазерный диск, оптический диск, цифровой многофункциональный диск (DVD), дискету и Blu-ray® диск, где магнитные диски обычно воспроизводят данные магнитным способом, в то время как оптические диски обычно воспроизводят данные оптически с помощью лазеров.
Программное обеспечение или инструкции также передаются через передающую среду. Например, если программное обеспечение передается из интернет-сайта, сервера или другого удаленного источника с использованием коаксиального кабеля, оптоволоконного кабеля, витой пары, цифровой абонентской линии (DSL) или беспроводных технологий, таких как инфракрасная, радио- и микроволновая, то коаксиальный кабель, оптоволоконный кабель, витая пара, цифровая абонентская линия (DSL) или беспроводные технологии, такие как инфракрасная, радио- и микроволновая, включаются в определение передающей среды.
Описанные здесь способы содержат один или несколько этапов или действий для достижения описанного способа. Этапы и/или действия способа могут быть взаимозаменяемыми друг с другом без отклонения от объема формулы изобретения. Другими словами, если для правильного функционирования описанного способа не требуется конкретный порядок этапов или действий, то порядок и/или использование конкретных этапов и/или действий могут быть модифицированы без отклонения от объема формулы изобретения.
Далее должно быть понятно, что модули и/или другие подходящие средства для выполнения описанных здесь способов и методов, таких как иллюстрируются на фиг. 5, 8 и 10, могут загружаться и/или получаться устройством по-другому. Например, устройство может быть подключено к серверу, чтобы способствовать переносу средства для выполнения описанных здесь способов. Альтернативно, различные описанные здесь способы могут быть обеспечены через накопитель данных (например, запоминающее устройство с произвольной выборкой (RAM), постоянное запоминающее устройство (ROM), физический носитель данных, такой как компакт-диск (CD), дискета и т.п.), так что устройство может получать различные способы после обеспечения или подключения к нему носителя данных. Более того, может быть использован любой подходящий метод для обеспечения описанных здесь способов и методов для устройства.
Должно быть понятно, что формула изобретения не должна ограничиваться точной конфигурацией и компонентами, проиллюстрированными здесь. Различные модификации и вариации могут быть выполнены в компоновке, функционировании и деталях описанных здесь систем, способов и устройств без отклонения от объема формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТИРОВКА ИНФОРМАЦИИ ОБ УРОВНЕ СИНХРОНИЗАЦИИ | 2010 |
|
RU2510985C2 |
| СХЕМЫ УПРАВЛЕНИЯ ПОИСКОВЫМ ВЫЗОВОМ И ЭНЕРГОПОТРЕБЛЕНИЕМ ДЛЯ ДОСТУПА К ЛОКАЛЬНОЙ СЕТИ | 2009 |
|
RU2510158C2 |
| КАДРИРОВАНИЕ, ДИСПЕТЧЕРИЗАЦИЯ И СИНХРОНИЗАЦИЯ В СИСТЕМАХ БЕСПРОВОДНОЙ СВЯЗИ | 2016 |
|
RU2694586C1 |
| СХЕМЫ УПРАВЛЕНИЯ ПОИСКОВЫМ ВЫЗОВОМ И ЭНЕРГОПОТРЕБЛЕНИЕМ ДЛЯ ДОСТУПА К ЛОКАЛЬНОЙ СЕТИ | 2012 |
|
RU2530732C2 |
| СИНХРОНИЗАЦИЯ БЕСПРОВОДНОЙ СЕТИ | 2009 |
|
RU2459360C2 |
| РАЗРЕШЕНИЕ НЕОПРЕДЕЛЕННОСТИ ИДЕНТИФИКАТОРА УЗЛА С ПОМОЩЬЮ ТЕРМИНАЛА ДОСТУПА, ИСПОЛЬЗУЯ ПРОМЕЖУТОК ВРЕМЕНИ | 2009 |
|
RU2470463C2 |
| УПРАВЛЕНИЕ И РУКОВОДСТВО ДОСТУПОМ К НЕСКОЛЬКИМ СЕТЯМ | 2005 |
|
RU2377728C2 |
| УСТРОЙСТВО, СИСТЕМА И СПОСОБ ПРЕДОСТАВЛЕНИЯ ИНФОРМАЦИИ О ВОЗМОЖНОСТИ ВЫГРУЗКИ В ПОЛЬЗОВАТЕЛЬСКОЕ ОБОРУДОВАНИЕ (UE) | 2015 |
|
RU2631674C1 |
| КОНЦЕНТРАТОР ДЛЯ МУЛЬТИПЛЕКСИРОВАНИЯ СОЕДИНЕНИЙ ТОЧЕК ДОСТУПА С БЕСПРОВОДНОЙ СЕТЬЮ | 2009 |
|
RU2476022C2 |
| КОНЦЕНТРАТОР ДЛЯ МУЛЬТИПЛЕКСИРОВАНИЯ СОЕДИНЕНИЙ ТОЧКИ ДОСТУПА С БЕСПРОВОДНОЙ СЕТЬЮ | 2009 |
|
RU2491791C2 |
Изобретение относится к системам связи. Раскрывается способ синхронизации системы беспроводной связи. Длительность паузы для базовой станции определяется на основе времени, требуемого для получения или поддержания синхронизации соседней базовой станцией. Все передачи из базовой станции приостанавливаются на протяжении длительности паузы. Уровень многочисленных базовых станций может приостанавливать передачи в одно и то же время, тем самым подавляя помехи, что является техническим результатом. 4 н. и 72 з.п. ф-лы. 13 ил.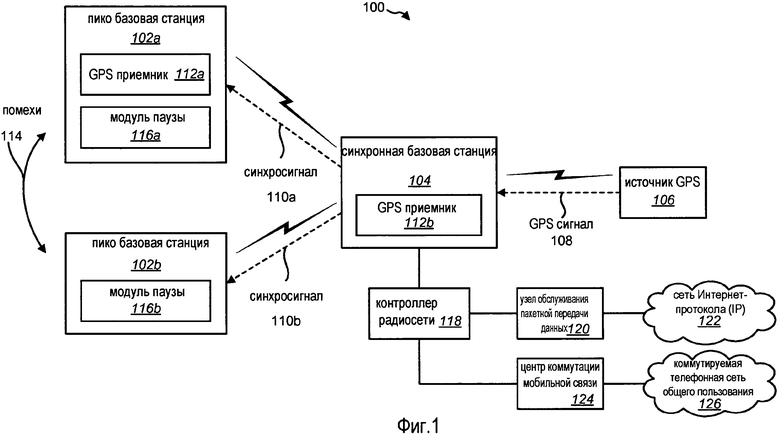
1. Способ синхронизации системы беспроводной связи, содержащий:
определение длительности паузы для базовой станции на основе времени, требуемого для получения или поддержания синхронизации соседней базовой станцией, и
приостановку всех передач из базовой станции на протяжении длительности паузы.
2. Способ по п.1, в котором приостановка происходит периодически в каждом периоде отслеживания в системе беспроводной связи.
3. Способ по п.2, в котором базовая станция является синхронной базовой станцией.
4. Способ по п.3, в котором длительность паузы дополнительно основана на уровне слоя синхронной базовой станции, который показывает число базовых станций между синхронной базовой станцией и узлом источника глобальной временной синхронизации, включая узел источника глобальной временной синхронизации.
5. Способ по п.4, в котором длительность паузы имеет длину n·Т, где n представляет собой уровень слоя синхронной базовой станции и Т представляет собой время, требуемое для получения или поддержания синхронизации соседней базовой станцией.
6. Способ по п.3, дополнительно содержащий определение начального времени паузы для длительности паузы как времени, когда период отслеживания (Р) для системы беспроводной связи делится равномерно в глобальное время в масштабе сети.
7. Способ по п.3, дополнительно содержащий прием глобального времени в масштабе сети из соседней базовой станции или узла источника глобальной временной синхронизации.
8. Способ по п.2, в котором базовая станция является асинхронной базовой станцией.
9. Способ по п.8, в котором длительность паузы дополнительно основана на максимальной ошибке между глобальным временем в масштабе сети и оцененным временем в масштабе сети, и на полном числе уровней слоя в системе беспроводной связи.
10. Способ по п.9, дополнительно содержащий определение начального времени паузы для длительности паузы на основе оцененного времени в масштабе сети и на максимальной ошибке между глобальным временем в масштабе сети и оцененным временем в масштабе сети.
11. Способ по п.9, дополнительно содержащий прием оцененного времени в масштабе сети с использованием протокола обратной связи.
12. Способ по п.11, в котором протокол обратной связи представляет собой протокол сетевого времени (NTP).
13. Способ по п.1, дополнительно содержащий прием длительности паузы в сообщении обратной связи из соседней базовой станции.
14. Способ по п.1, дополнительно содержащий прием начального времени паузы для длительности паузы в сообщении обратной связи из соседней базовой станции.
15. Способ по п.1, в котором базовой станцией является пикобазовая станция, фемтобазовая станция или домашний узел eNodeB.
16. Способ по п.1, дополнительно содержащий прием множества сигналов синхронизации и использование сигнала синхронизации, который обеспечивает наименьший уровень слоя.
17. Способ по п.16, дополнительно содержащий использование сигнала синхронизации с самым высоким отношением сигнала к помехам и шуму (SINR), если множество сигналов синхронизации обеспечивают одинаковый уровень слоя.
18. Способ по п.1, в котором длительность паузы является непрерывной.
19. Способ по п.1, в котором длительность паузы является прерывистой.
20. Устройство синхронизации системы беспроводной связи, содержащее:
процессор;
запоминающее устройство в электронной коммутации с процессором;
инструкции, сохраненные в запоминающем устройстве, причем инструкции являются выполняемыми процессором для:
определения длительности паузы для базовой станции на основе времени, требуемого для получения или поддержания синхронизации соседней базовой станцией; и
приостановки всех передач из базовой станции на протяжении длительности паузы.
21. Устройство по п.20, в котором инструкции дополнительно являются выполняемыми для периодической приостановки всех передач в каждом периоде отслеживания в системе беспроводной связи.
22. Устройство по п.21, в котором базовая станция является синхронной базовой станцией.
23. Устройство по п.22, в котором длительность паузы дополнительно основана на уровне слоя синхронной базовой станции, который указывает число базовых станций между синхронной базовой станцией и узлом источника глобальной временной синхронизации, включая узел источника глобальной временной синхронизации.
24. Устройство по п.23, в котором длительность паузы имеет длину n·Т, где n представляет собой уровень слоя синхронной базовой станции и Т представляет собой время, требуемое для получения или поддержания синхронизации соседней базовой станцией.
25. Устройство по п.22, дополнительно содержащее инструкции, выполняемые для определения начального времени паузы для длительности паузы как времени, когда период отслеживания для системы беспроводной связи делится равномерно в глобальное время в масштабе сети.
26. Устройство по п.22, дополнительно содержащее инструкции, выполняемые для приема глобального времени в масштабе сети из соседней базовой станции или узла источника глобальной временной синхронизации.
27. Устройство по п.21, в котором базовая станция является асинхронной базовой станцией.
28. Устройство по п.27, в котором длительность паузы дополнительно основана на максимальной ошибке между глобальным временем в масштабе сети и оцененным временем в масштабе сети, и на полном числе уровней слоя в системе беспроводной связи.
29. Устройство по п.28, дополнительно содержащее инструкции;
выполняемые для определения начального времени паузы для длительности паузы на основе оцененного времени в масштабе сети и на максимальной ошибке между глобальным временем в масштабе сети и оцененным временем в масштабе сети.
30. Устройство по п.28, дополнительно содержащее инструкции, выполняемые для приема оцененного времени в масштабе сети с использованием протокола обратной связи.
31. Устройство по п.30, в котором протокол обратной связи представляет собой протокол сетевого времени (NTP).
32. Устройство по п.20, дополнительно содержащее инструкции, выполняемые для приема длительности паузы в сообщении обратной связи из соседней базовой станции.
33. Устройство по п.20, дополнительно содержащее инструкции, выполняемые для приема начального времени паузы для длительности паузы в сообщении обратной связи из соседней базовой станции.
34. Устройство по п.20, в котором базовой станцией является пикобазовая станция, фемтобазовая станция или домашний узел eNodeB.
35. Устройство по п.20, дополнительно содержащее инструкции, выполняемые для приема множества сигналов синхронизации и для использования сигнала синхронизации, который обеспечивает наименьший уровень слоя.
36. Устройство по п.35, дополнительно содержащее инструкции, выполняемые для использования сигнала синхронизации с самым высоким отношением сигнала к помехам и шуму (SINR), если множество сигналов синхронизации обеспечивают одинаковый уровень слоя.
37. Устройство по п.20, в котором длительность паузы является непрерывной.
38. Устройство по п.20, в котором длительность паузы являются прерывистой.
39. Устройство синхронизации системы беспроводной связи, содержащее:
средство для определения длительности паузы для базовой станции на основе времени, требуемого для получения или поддержания синхронизации соседней базовой станцией; и
средство для приостановки всех передач из базовой станции на протяжении длительности паузы.
40. Устройство по п.39, в котором приостановка происходит периодически в каждом периоде отслеживания в системе беспроводной связи.
41. Устройство по п.40, в котором базовая станция является синхронной базовой станцией.
42. Устройство по п.41, в котором длительность паузы дополнительно основана на уровне слоя синхронной базовой станции, который показывает число базовых станций между синхронной базовой станцией и узлом источника глобальной временной синхронизации, включая узел источника глобальной временной синхронизации.
43. Устройство по п.42, в котором длительность паузы имеет длину n·Т, где n представляет собой уровень слоя синхронной базовой станции и Т представляет собой время, требуемое для получения или поддержания синхронизации соседней базовой станцией.
44. Устройство по п.41, дополнительно содержащее средство для определения начального времени паузы для длительности паузы как времени, когда период отслеживания для системы беспроводной связи делится равномерно в глобальное время в масштабе сети.
45. Устройство по п.41, дополнительно содержащее средство для приема глобального времени в масштабе сети из соседней базовой станции или узла источника глобальной временной синхронизации.
46. Устройство по п.40, в котором базовая станция является асинхронной базовой станцией.
47. Устройство по п.46, в котором длительность паузы дополнительно основана на максимальной ошибке между глобальным временем в масштабе сети и оцененным временем в масштабе сети и на полном числе уровней слоя в системе беспроводной связи.
48. Устройство по п.47, дополнительно содержащее средство для определения начального времени паузы для длительности паузы на основе оцененного времени в масштабе сети и на максимальной ошибке между глобальным временем в масштабе сети и оцененным временем в масштабе сети.
49. Устройство по п.47, дополнительно содержащее средство для приема оцененного времени в масштабе сети с использованием протокола обратной связи.
50. Устройство по п.49, в котором протокол обратной связи представляет собой протокол сетевого времени (NTP).
51. Устройство по п.39, дополнительно содержащее средство для приема длительности паузы в сообщении обратной связи из соседней базовой станции.
52. Устройство по п.39, дополнительно содержащее средство для приема начального времени паузы для длительности паузы в сообщении обратной связи из соседней базовой станции.
53. Устройство по п.39, в котором базовой станцией является пикобазовая станция, фемтобазовая станция или домашний узел eNodeB.
54. Устройство по п.39, дополнительно содержащее средство для приема множества сигналов синхронизации и для использования сигнала синхронизации, который обеспечивает наименьший уровень слоя.
55. Устройство по п.54, дополнительно содержащее средство для использования сигнала синхронизации с самым высоким отношением сигнала к помехам и шуму (SINR), если множество сигналов синхронизации обеспечивают одинаковый уровень слоя.
56. Устройство по п.39, в котором длительность паузы является непрерывной.
57. Устройство по п.39, в котором длительность паузы является непрерывной.
58. Считываемый компьютером носитель, на котором сохранены инструкции для синхронизации системы беспроводной связи, причем инструкции содержат
код для определения длительности паузы для базовой станции на основе времени, требуемого для получения или поддержания синхронизации соседней базовой станцией;
код для приостановки всех передач из базовой станции на протяжении длительности паузы.
59. Считываемый компьютером носитель по п.58, причем приостановка происходит периодически в каждом периоде отслеживания в системе беспроводной связи.
60. Считываемый компьютером носитель по п.59, причем базовая станция является синхронной базовой станцией.
61. Считываемый компьютером носитель по п.60, причем длительность паузы дополнительно основана на уровне слоя синхронной базовой станции, который показывает число базовых станций между синхронной базовой станцией и узлом источника глобальной временной синхронизации, включая узел источника глобальной временной синхронизации.
62. Считываемый компьютером носитель по п.61, причем длительность паузы имеет длину n·Т, где n представляет собой уровень слоя синхронной базовой станции и Т представляет собой время, требуемое для получения или поддержания синхронизации соседней базовой станцией.
63. Считываемый компьютером носитель по п.60, дополнительно содержащий код для определения начального времени паузы для длительности паузы как времени, когда период отслеживания для системы беспроводной связи делится равномерно в глобальное время в масштабе сети.
64. Считываемый компьютером носитель по п.60, дополнительно содержащий код для приема глобального времени в масштабе сети из соседней базовой станции или узла источника глобальной временной синхронизации.
65. Считываемый компьютером носитель по п.59, причем базовая станция является асинхронной базовой станцией.
66. Считываемый компьютером носитель по п.65, причем длительность паузы дополнительно основана на максимальной ошибке между глобальным временем в масштабе сети и оцененным временем в масштабе сети и на полном числе уровней слоя в системе беспроводной связи.
67. Считываемый компьютером носитель по п.66, дополнительно содержащий код для определения начального времени паузы для длительности паузы на основе оцененного времени в масштабе сети и на максимальной ошибке между глобальным временем в масштабе сети и оцененным временем в масштабе сети.
68. Считываемый компьютером носитель по п.66, дополнительно содержащий код для приема оцененного времени в масштабе сети с использованием протокола обратной связи.
69. Считываемый компьютером носитель по п.68, причем протокол обратной связи представляет собой протокол сетевого времени (NTP).
70. Считываемый компьютером носитель по п.58, дополнительно содержащий код для приема длительности паузы в сообщении обратной связи из соседней базовой станции.
71. Считываемый компьютером носитель по п.58, дополнительно содержащий код для приема начального времени паузы для длительности паузы в сообщении обратной связи из соседней базовой станции.
72. Считываемый компьютером носитель по п.58, причем базовой станцией является пикобазовая станция, фемтобазовая станция или домашний узел eNodeB.
73. Считываемый компьютером носитель по п.58, дополнительно содержащий код для приема множества сигналов синхронизации и для использования сигнала синхронизации, который обеспечивает наименьший уровень слоя.
74. Считываемый компьютером носитель по п.73, дополнительно содержащий код для использования сигнала синхронизации с самым высоким отношением сигнала к помехам и шуму (SINR), если множество сигналов синхронизации обеспечивают одинаковый уровень слоя.
75. Считываемый компьютером носитель по п.58, причем длительность паузы является непрерывной.
76. Считываемый компьютером носитель по п.58, в котором длительность паузы является прерывистой.
| Устройство для автоматического удаления инструмента,преимущественно станка для обработки оптических деталей | 1983 |
|
SU1148755A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ СИСТЕМЫ БЕСПРОВОДНОЙ СВЯЗИ | 1999 |
|
RU2233033C2 |
| Перистальтический насос | 1982 |
|
SU1041746A2 |
| Задний центр токарного станка | 1986 |
|
SU1355450A1 |

