2.Устройство по П.1, о т л иа ю щ е е с я тем, что пружина
между корпусом и пневмоцилиндром установлена соосно с цилиндром.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сферошлифовальный станок | 1986 |
|
SU1414580A1 |
| СТАНОК ДЛЯ ГИБКИ ПРОВОЛОКИ И ПРУТКОВ | 2022 |
|
RU2803303C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Устройство для фиксации и прижима свариваемых деталей | 1977 |
|
SU707741A1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| Станок для обработки оптических деталей | 1983 |
|
SU1151430A2 |
| Станок для обработки оптических деталей | 1986 |
|
SU1340998A1 |
| УСТРОЙСТВО ЦЕНТРИРОВАНИЯ И ЗАГРУЗКИ С УЗЛОМ ПРИЕМА И ПОДАЧИ ЧУРАКА В ЗОНУ ЦЕНТРОВКИ И МЕХАНИЗМОМ СИНХРОНИЗАЦИИ | 2008 |
|
RU2378107C1 |
| Устройство для закатки обрезиненного корда | 1983 |
|
SU1100126A1 |
| Устройство для сборки тонкостенных изделий | 1974 |
|
SU524654A1 |
1.УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УДАЛЕНИЯ ИНСТРУМЕНТА, ПРЕИМУЩЕСТВЕННО СТАНКА ДЛЯ ОБРАБОТКИ ОПТИЧЕСКИХ ДЕТАЛЕЙ, содержащее корпус, подвижно установленную на корпусе штангу с захватом для инструмента и соединенньгй со штангой привод ее перемещения в виде пневмоцилиндра, отличающееся тем, что, с целью повышения производительности, оно снабжено шарнирно смонтированными на корпусе двуплечим рычагом для перемещения штанги и поворотной направлякяцей для штанги, на одном конце которой выполнен паз для перемещения штанги, а на другом закреплен подпружиненный относительно корпуса пневмоцилиндр, при этом оба конца поворотной направляющей для штанги выполнены с упорами для ограничения ее перемещения относительно корпуса, а рычаг для перемещения штанги шарнирно сочленен одним плечом со штангой, а другим со штоком пневмоцилиндра и подпружинен относительно корпуса, при этом захват для инструмента выполнен в виде вилки. ipi 00 ел СП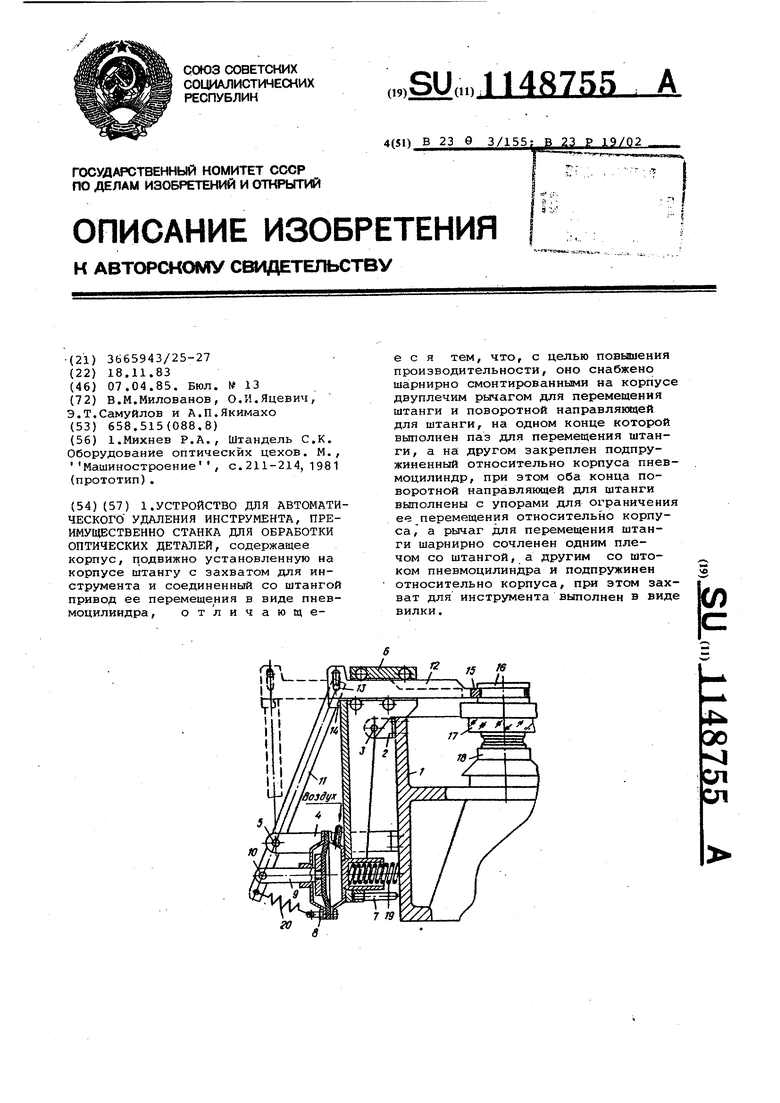
Изобретение относится к оптическому станкостроению и может быть использовано для съема инстру мента в оптическ1«с станках для шлифования, полирования и доводки сферических, плоских и асферических поверхностей оптических деталей.
Известно устройство для автоматического удаления инструмента, преимущественно станка для обработки оптических деталей, содержащее корпус, подвижно установленную на корпусе штангу с захватом для инструмента и связанный со штангой привод ее перемещения в виде пневмоцилиндра ij «,.
Недостатком известного устройства является невысокая производительность труда вследствие того, что требуются затраты времени на крепление инструмента к штанге. Указанный недостаток не позволяет использовать устройство в автоматизированных линиях обработки оптических деталей.
Цель изобретения - повышение производительности устройства.
Поставленная цель достигается тем, что устройство для автоматического удаления инструмента, преимущественно станка для обработки оптических деталей, содержащее корпус, 1С1ОДВИЖНО установленную на корпусе штангу с захватом для инструмента и соединенный со штангой привод ее перемещения в виде пневмоцилиндра, снабжено шарнирно смонтированными на корпусе двуплечим рычагом для перемещения штанги и поворотной направляющей для штанги, на одном конце которой выполнен паз для перемеадення штанги, а на другом жестко закреплен подпружиненнай относительно корпуса пневмоцилиндр, при этом оба конца поворотной направляющей.для штанги выполнены с упорами для ограничения ее перемещения относительно корпуса а рычаг для перемещения штанги шарнирно сочленен одним плечом со штангой, а другим со штоком пневмоцилиндра и подпружинен относительно корпуса, при этом захват для инструмента выполнен в виде вилки,
Кроме того, пружина между корпусом механизма и пневмоцилиндром установлена соосно пневмоцилиндру.
Введение направляющей для штанг установленной поворотно на горизонтальной оси корпуса, и ее жесткая связь с пневмоприводом позволяет через кинематическую связь штока пневмопривода со штангой при подаче в пневмопривод сжатого воздуха, осуществить горизонтальное перемещение штанги до соприкосновения имеющегося на направляющей упора с корпусом. При этом горизонтальное перемещение штанги прекращается и происходит захват инструмента вилкой, выполненной на конце штанги. Усилие горизонтального перемещения штанги при этом н превышает усилие пружины,установленной между серьгой и .корпусом, при ее рабочей деформации, С прекращением горизонтального переме,щения штанги при дальнейшем поступлении сжатого воздуха в пневмоприв преодолевается сила рабочей деформции пружины, установленной между пневмоцилиндром и корпусом. При этом происходит поворот направляющ для штанги на оси в вертикальной плоскости вместе со штангой и инструментом, т,е, происходит отрыв инструмента от обрабатываемой повености детали. После этого воздух и пневмопривода выбрасывается в атмосферу и штанга с инструментом возвращается в исходное положение, чем заканчивается съем инструмента с поверхности обрабатываемой детали. .
На чертеже изображено устройств для автоматического удаления ингг струмента в положении захвата штангой инструмента (пунктиром показано исходное положение штанги).
Устройство содержит корпус 1, на котором установлен кронштейн 2 с горизонтальной осью 3 и кронштей 4 с горизонтальной осью 5, На поворотной направляющей 6, снабженной упором 7, установленной на оси J, жестко закреплен пневмоцилиндр 8,шток У которого через ось 10 соединен с двуплечим рычагом 11, Штанга J.2, установленная с возможностью возвратно-поступательного горизонтального перпендикулярно; оси 3 перемещения в пазу поворотной направляющей 6 шарнирно через ось 13 связана с двуплечим рычагом II, который через ось Ь установлен на кронштейне 4. На конце штанги 12,шарнирно связанном с двуплечим рычагом 11,имеется упор 14, ограничивающий горизонтальное выдвижение штан1-и 12,Второй конец штанГи J.2 выполнен в виде вилки 15 для захвата инструмента 16, который установлен на обрабатьшаемой детали 17, закрепленной в шпинделе 18. . Между поворотной направляющей 6 и корпусом 1 станка соосно с пневмоцилиндром В установлена предварительно сжатая пружина 19. Упор 7 ограничивает поворот направляющей 6 под действием усилия,передаваемохо пневмоцилиндром 8. Двуплечий рычаг JL с направляющей 6 связан пружиной 20, обеспечивающе возврат штанги 12 в исходное положение (показано пунктиром).
Устройство работает следующим образом.
При подаче сжатого воздуха в пневмоцилиндр 8 шток 9 через ось
10разворачивает двуплечий рычаг
11вокруг оси 5. Рычаг 11 через ось 13 по поворотной направляющей 6 перемещает штангу 12 из исходного положения к инструменту 16. При этом вилка 15 штанги 12 захватывает инструмент 16, а упор 14,
выполненный на штанге 12, упирается в направляющую 6, который вместе со штангой 12 под воздействием давления воздуха, поступающего в пневмоцилиндр 8, поворачивается на оси 3 до соприкссновения упора 7 с корпусом 1. При этом пружина 19 сжимается, штанга 12 отрывает инструмент 16 от обрабатываемой поверхности детали 17 и воздух управляющим устройством (не показано) из пневмоцилиндра 8 выбрасывается в атмосферу. Пружина 19 разворачивает направляющую 6 на оси 3 до соприкосновения ее с корпусом 1, а пр1жина 20 через двуплечий рьачаг
11перемещает штангу 12 вместе с инструментом 16 по направлякядей
6в исходное положение, показанное на чертеже пунктиром, в котором инструмент 1б снимается со штанги
12вручную или с помощью подъемного механизма. Далее цикл работы механизма съема инструмента повторяется.
Изобретение позволяет существенно уменьшить время на замену инструмента за счет исключения ручного труда, автоматизировать процесс съема инструмента и повысить производительность.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Оборудование оптических цехов | |||
| М., Машиностроение с.211-214, 1981 (прототип). | |||
