Настоящее изобретение относится к машиностроению и может быть использовано в качестве способа работы при реализации его в трехступенчатом планетарном редукторе.
Известен способ работы трехступенчатого планетарного редуктора, реализованный в трехступенчатом планетарном редукторе (Слюдиков М.Н., Бруевич Н.Г., Сергеев В.И. и др. Надежность и точность механизмов приводов систем управления летательных аппаратов. - М.: Машиностроение, 1984. с 74. рис.4.6.), включающий передачу крутящего момента от быстроходного вала к тихоходному посредством трех последовательно установленных планетарных рядов, взаимодействие между которыми осуществляют через центральные опоры.
Недостаток указанного способа заключается в том, что его реализация в редукторе не обеспечивает достаточно высокую точность и надежность работы редуктора.
В качестве прототипа выбран способ работы редуктора, реализованный в электроприводе для создания крутящего момента (RU 2252347, МПК F16H 1/48, H02K 7/116. Опубл. 20.10.2004).), включающий передачу крутящего момента от быстроходного вала к тихоходному посредством трех последовательно установленных планетарных рядов, взаимодействие между которыми осуществляют через центральные опоры.
Недостаток прототипа аналогичен недостатку вышеописанного аналога.
Задачи изобретения - повышение точности и надежности работы редуктора, улучшение его габаритно-массовых характеристик.
Задачи решены за счет того, что в способе работы трехступенчатого планетарного редуктора (включающего передачу крутящего момента от электродвигателя входному валу быстроходного планетарного ряда, а от него - к выходному валу посредством трех последовательно установленных планетарных рядов, взаимодействие между которыми в осевом направлении осуществляют через осевые опоры, размещенные между шестерней и водилом промежуточного ряда, а также - в торце шестерни тихоходного ряда), осевые опоры, выполненные в виде шариков, размещают во вкладышах, осуществляют их одновременное осевое подпружинивание с помощью пружин, размещаемых в каналах шестерен промежуточного и тихоходного рядов, при этом силу упругости пружин регулируют винтами, один из которых расположен в канале шестерни промежуточного ряда и непосредственно контактирует с пружиной, а второй расположен в водиле тихоходного ряда со стороны выходного вала, выполненного полым и как единое целое с указанным водилом, а со стороны контакта с центральной опорой имеет выемку, для взаимодействия с шариком; при этом регулировочные винты, вкладыши, осевые опоры и пружины располагают по центру осей вращения водил редуктора.
Суть предложенного способа, реализация которого осуществлена в устройстве электропривода с трехступенчатым планетарным редуктором, иллюстрируется на фиг.1-3.
На фиг.1 показан общий вид электропривода в разрезе.
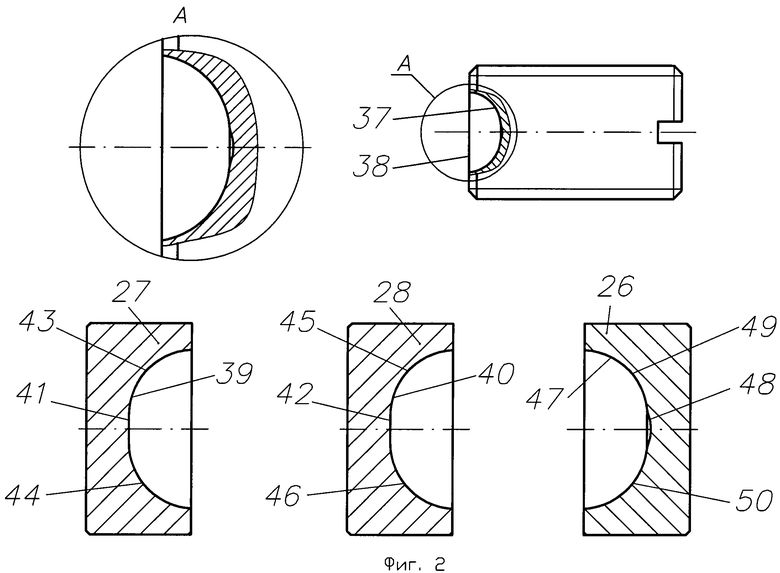
На фиг.2 показаны вкладыши центральных опор 26, 27, 28 и регулировочный винт 35 для установки требуемых зазоров при изготовлении.
На фиг.3 показана центральная опора 20 с вкладышами 26, 27.
Электропривод с трехступенчатым планетарным редуктором содержит электродвигатель 1, редуктор, включающий плату 2 с корпусом 3, быстроходный вал 4, связанный с электродвигателем 1 посредством предступени 5, быстроходный, промежуточный и тихоходный планетарные ряды 6, 7, 8, каждый из которых включает соответственно солнечную шестерню 9, 10, 11, сателлиты 12, 13, 14, водило 15, 16, 17 и корону 18, 19 (корона промежуточного планетарного ряда выполнена как единое целое с короной быстроходного планетарного ряда), причем быстроходное водило 15 выполнено как единое целое с промежуточной солнечной шестерней 10, промежуточное водило 16 выполнено как единое целое с тихоходной солнечной шестерней 11; две осевые опоры 20, 21 между промежуточной солнечной шестерней 10 и промежуточным водилом 16 и между тихоходной солнечной шестерней 11 и тихоходным водилом 17; быстроходное водило 15 выполнено с опорой 22 со стороны электродвигателя 1; тихоходный (выходной) вал 23, выполненный как единое целое с тихоходным водилом 17 и установленный с опорой на двух радиальных шарикоподшипниках 24, 25; каждая осевая опора 20, 21 выполнена сферической и снабжена своими вкладышами 26, 27, 28 с твердостью, выше твердости водил 15, 16, с возможностью их перемещения в направлении оси, совпадающей с осью вращения водил 15, 16, 17; вкладыши 27, 28, установленные по оси в промежуточное водило 16, выполненное как единое целое с тихоходной солнечной шестерней 11, с обеих его сторон, выполнены подпружиненными между собой посредством пружины 29, установленной в выполненном между ними осевом канале 30; вкладыш 26, установленный в торце промежуточной солнечной шестерни, 10 выполнен подпружиненным посредством пружины 31, установленной в осевом канале 32, ось которого совпадает с продольной осью промежуточной солнечной шестерни 10, причем указанный осевой канал 32 со стороны быстроходной солнечной шестерни 9 снабжен регулировочным винтом 33 для регулировки усилия пружины 31; быстроходное водило 15 со стороны предступени 5 выполнено с опорой 22 в виде радиального шарикоподшипника, а радиальные шарикоподшипники 24, 25 тихоходного вала 23, выполненного полым со шлицами 34 для взаимодействия с объектом вращения, установлены сопряженными своими торцами; тихоходное водило 17 со стороны тихоходного (выходного) вала 23 выполнено с регулировочным винтом 35 с контргайкой 36 и с рабочей поверхностью 37 на его торце 38 со стороны тихоходной солнечной шестерни 11 для осевой опоры 21 промежуточного водила 16, выполненного как единое целое с тихоходной солнечной шестерней 11, аналогичной рабочей поверхности вкладыша 26, установленного в торце промежуточной солнечной шестерни 10; во вкладышах 27, 28, установленных в промежуточное водило 16, выполненное как единое целое с тихоходной солнечной шестерней 11, имеются рабочие поверхности 39, 40 в виде центральной площадки 41, 42, ортогональной продольной оси вращения промежуточного водила 16 и тихоходной шестерни 11, с переходом без уступов в симметричные сферические поверхности 43, 44, 45, 46 с радиусом кривизны, равным радиусу сферических опор 20, 21, и центрами кривизны, смещенными в плоскостях, ортогональных оси вращения водила и проходящих через центры сферических опор 20, 21, относительно центров кривизны каждой этой сферической опоры 20, 21 на величину 0,25 радиуса ее сферической поверхности; во вкладыше, установленном в торце промежуточной солнечной шестерни 10, выполнена рабочая поверхность 47, которая представляет собой вогнутую часть сферической поверхности 48, с радиусом кривизны, равным радиусу поверхности сферической опоры 20, и с центром кривизны, смещенным вдоль оси вращения водила в сторону вогнутости указанной части сферической поверхности 48 на расстояние, равное 0,15 радиуса сферической опоры 20, переходящую без уступов в симметричные сферические поверхности 49, 50, с радиусами кривизны, равными радиусу сферической опоры 20, и центрами кривизны, смещенными в плоскости, ортогональной оси промежуточной солнечной шестерни 10 и проходящей через центр указанной сферической опоры 20, относительно центра кривизны сферической опоры 20 на величину 0,25 радиуса указанной сферической опоры 20.
Устройство работает следующим образом. Вращающий момент от электродвигателя 1 передается входному валу (на фигуре не показано) предступени 5, выходной вал которой одновременно является быстроходным валом 4 трехступенчатого планетарного редуктора. Предступень 5 представляет собой одноступенчатый планетарный редуктор, реализованный по схеме 2K-h. На быстроходном валу 4 установлена быстроходная солнечная шестерня 9, посредством которой вращающий момент передается сателлитам 12 (например, трем) и, соответственно, быстроходному водилу 15 и промежуточной солнечной шестерне 10, которая в свою очередь передает вращающий момент сателлитам 13 и, соответственно, промежуточному водилу 16, а также тихоходной солнечной шестерне 11, которая в свою очередь передает вращающий момент тихоходным сателлитам 14 и, соответственно, тихоходному водилу 17 и тихоходному валу 23.
Осевые опоры 20, 21 установлены соответственно во вкладышах 26, 27, 28 и в выемке регулировочного винта 35, которым обеспечивается регулировка требуемых рабочих осевых зазоров между ними при изготовлении в обеспечение точности и надежности работы электропривода.
Вкладыш 26 имеет рабочую поверхность 47, которая выполнена с вышеуказанной вогнутой частью сферической поверхности 48, переходящей без уступов в симметричные сферические поверхности 49, 50. Вогнутая часть сферической поверхности 48 выполнена для обеспечения центрирования сферической опоры 20. Аналогичную рабочую поверхность имеет регулировочный винт для обеспечения центрирования сферической опоры 21.
Рабочие поверхности 39, 40 вкладышей 27 и 28 выполнены в виде центральных площадок 41, 42, ортогональных продольной оси промежуточного водила 16, выполненного как единое целое с тихоходной солнечной шестерней 11, переходящих без уступов в симметричные сферические поверхности 43, 44, 45, 46. Наличие указанных площадок 41, 42 дает возможность перемещаться осевым опорам 20, 21 в радиальном направлении, относительно оси редуктора, а также как поступательно перемещаться промежуточному водилу 16 вместе с тихоходной солнечной шестерней 11, так и осуществлять поворот на определенный угол в любой из плоскостей трехмерной системы координат, что позволяет самоустанавливаться промежуточному водилу 16, снижая неравномерность распределения нагрузки между промежуточными сателлитами 13 и тихоходной солнечной шестерней 11, снижая неравномерность распределения нагрузки между тихоходными сателлитами 14. Это позволило повысить КПД и надежность устройства.
Перемещением вкладышей 27, 28 под действием пружины 29 осуществляется компенсация зазоров между вкладышами 26, 27, 28, регулировочным винтом 35 и сферическими опорами 20, 21, возникающих в результате износа как вкладышей и рабочей поверхности регулировочного винта, так и сферических опор. Компенсируемые зазоры могут появляться не только в результате износа рабочих поверхностей, но и вследствие изменения температурных рабочих режимов. Вкладыш 26, установленный в проточку, выполненную в торце промежуточной солнечной шестерни 10, может перемещаться в осевом направлении под действием силы упругости пружины 31, установленной в осевом канале 32 солнечной шестерни 10 и находящейся в сжатом состоянии. Регулировочным винтом 33 осуществляют регулирование силы упругости пружины 31. При этом жесткости пружин 29 и 31 должны быть одинаковыми. Таким образом, повышены точность и надежность работы редуктора.
Тихоходное водило 17, выполненное как единое целое с выходным валом 23, вращается на двух радиальных шарикоподшипниках 24, 25, которые установлены с сопряжением их торцов. Это позволило улучшить габаритно-массовые параметры электропривода.
Предложенное решение в настоящее время находится на этапе выпуска конструкторской документации для изготовления образцов наземной отработки с последующим запуском в серийное производств.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД С ТРЕХСТУПЕНЧАТЫМ ПЛАНЕТАРНЫМ РЕДУКТОРОМ | 2011 |
|
RU2478849C2 |
| ЭЛЕКТРОПРИВОД С ТРЕХСТУПЕНЧАТЫМ ПЛАНЕТАРНЫМ РЕДУКТОРОМ | 2011 |
|
RU2464464C1 |
| ЭЛЕКТРОПРИВОД С ПЛАНЕТАРНЫМ РЕДУКТОРОМ ДЛЯ МЕХАНИЧЕСКИХ СИСТЕМ КОСМИЧЕСКИХ АППАРАТОВ | 2017 |
|
RU2680957C1 |
| ЭЛЕКТРОПРИВОД С ТРЕХСТУПЕНЧАТЫМ ПЛАНЕТАРНЫМ РЕДУКТОРОМ | 2011 |
|
RU2478851C2 |
| ЭЛЕКТРОПРИВОД С ТРЕХСТУПЕНЧАТЫМ ПЛАНЕТАРНЫМ РЕДУКТОРОМ | 2011 |
|
RU2472993C1 |
| СПОСОБ РАБОТЫ ЭЛЕКТРОПРИВОДА С ТРЕХСТУПЕНЧАТЫМ ПЛАНЕТАРНЫМ РЕДУКТОРОМ | 2011 |
|
RU2472992C1 |
| СПОСОБ РАБОТЫ ЭЛЕКТРОПРИВОДА С ТРЕХСТУПЕНЧАТЫМ ПЛАНЕТАРНЫМ РЕДУКТОРОМ | 2011 |
|
RU2465496C1 |
| СПОСОБ РАБОТЫ ТРЕХСТУПЕНЧАТОГО ПЛАНЕТАРНОГО РЕДУКТОРА | 2011 |
|
RU2478852C1 |
| ЭЛЕКТРОПРИВОД С ТРЕХСТУПЕНЧАТЫМ ПЛАНЕТАРНЫМ РЕДУКТОРОМ | 2011 |
|
RU2478850C2 |
| СПОСОБ РАБОТЫ ЭЛЕКТРОПРИВОДА С ПЛАНЕТАРНЫМ РЕДУКТОРОМ | 2011 |
|
RU2478854C2 |

Изобретение относится к машиностроению и может быть использовано в качестве способа работы при реализации его в трехступенчатом планетарном редукторе. Способ работы трехступенчатого планетарного редуктора заключается в передаче крутящего момента от электродвигателя (1) к выходному валу (23) посредством трех последовательно установленных планетарных рядов (6, 7, 8), взаимодействие между которыми в осевом направлении осуществляют через осевые опоры (20, 21), размещенные между шестерней (10) и водилом (16) промежуточного ряда (7), а также - в торце шестерни (11) тихоходного ряда (8). Осевые опоры (20, 21), выполненные в виде шариков, размещают во вкладышах (26, 27, 28), осуществляют их одновременное осевое подпружинивание с помощью пружин, размещаемых в каналах шестерен промежуточного и тихоходного рядов. Силу упругости пружин регулируют винтами (33, 35), один из которых (33) расположен в канале шестерни промежуточного ряда (7) и непосредственно контактирует с пружиной (31). Второй винт (35) расположен в водиле тихоходного ряда со стороны выходного вала (23) и со стороны контакта с осевой опорой имеет выемку для взаимодействия с опорой. Регулировочные винты, вкладыши, осевые опоры и пружины располагают по центру осей вращения водил редуктора. Изобретение позволяет повысить точность и надежность работы электропривода, уменьшить габаритные размеры. 3 ил.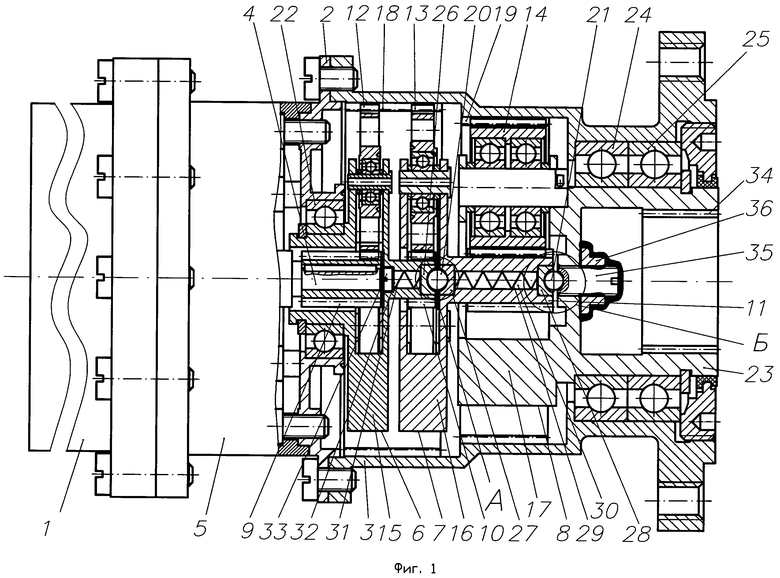
Способ работы электропривода с трехступенчатым планетарным редуктором, включающий передачу крутящего момента от электродвигателя входному валу быстроходного планетарного ряда, а от него - к выходному валу посредством трех последовательно установленных планетарных рядов, взаимодействие между которыми в осевом направлении осуществляют через осевые опоры, размещенные между шестерней и водилом промежуточного ряда, а также - в торце шестерни тихоходного ряда, отличающийся тем, что осевые опоры, выполненные в виде шариков, размещают во вкладышах, осуществляют их одновременное осевое подпружинивание с помощью пружин, размещаемых в каналах шестерен промежуточного и тихоходного рядов, при этом силу упругости пружин регулируют винтами, один из которых расположен в канале шестерни промежуточного ряда и непосредственно контактирует с пружиной, а второй расположен в водиле тихоходного ряда со стороны выходного вала, выполненного полым и как единое целое с указанным водилом, а со стороны контакта с осевой опорой имеет выемку, для взаимодействия с шариком; при этом регулировочные винты, вкладыши, осевые опоры и пружины располагают по центру осей вращения водил редуктора.
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ КРУТЯЩЕГО МОМЕНТА | 2003 |
|
RU2252347C2 |
| Планетарный многоступенчатый редуктор | 1972 |
|
SU460389A1 |
| Многоступенчатая планетарная передача с равномерным распределением нагрузок между сателлитами | 1961 |
|
SU149986A1 |
| Приспособление по типу промывного бура для разогрева жидкостей в закрытых сосудах | 1936 |
|
SU54934A1 |
| JP 59054844 A, 29.03.1984. | |||

