Изобретение относится к приборостроению и может быть использовано, например, для сообщения вращательного движения различным механизмам летательных аппаратов как при их штатных полетах, так и при испытаниях, а также механизмам, используемым в народном хозяйстве.
Известен электропривод для создания крутящего момента, содержащий размещенные в корпусе планетарный многоступенчатый редуктор с последовательным расположением ступеней и колесо внутреннего зацепления, выходной вал в виде зубчатого колеса с внутренними зубьями шестерни, кинематически связанные с водилом предыдущей ступени сателлиты и приводной элемент [1].
Недостатком указанного электропривода для создания крутящего момента является невысокий кпд за счет больших потерь в простых передачах.
Известен выбранный в качестве прототипа электропривод для создания крутящего момента, содержащий первый и второй электродвигатели со статором и ротором, имеющие каждый свой корпус, и размещенные в корпусе электропривода также и шестерни, планетарный редуктор с выходным валом и дифференциал с водилом и центральным колесом, при этом центральное колесо имеет внутренний зуб, а роторы установлены посредством первой группы подшипников каждый на своем корпусе [2].
Недостатком электропривода для создания крутящего момента - прототипа, также как и у аналога, является невысокий кпд за счет больших потерь в простых передачах.
Задачей предлагаемого технического решения является разработка электропривода для создания крутящего момента более простого в изготовлении и сборке при повышении кпд и уменьшении осевых габаритов.
Технический результат достигается тем, что в электроприводе для создания крутящего момента, содержащем первый и второй электродвигатели со статором и ротором с подшипниками первой группы, а также размещенные в корпусе электропривода шестерни, планетарный редуктор с выходным валом и дифференциал с водилом, сателлитами и центральными шестернями, одна из которых снабжена зубчатой муфтой, в отличие от известного, что в первый и второй электродвигатели введены валы роторов, при этом статоры первого и второго электродвигателей жестко соединены с корпусом электропривода, а вал ротора первого электродвигателя установлен посредством подшипников первой группы на основании, вал ротора второго электродвигателя оперт на вал ротора первого электродвигателя посредством подшипников второй группы, при этом вал ротора первого электродвигателя связан первой зубчатой муфтой с первой центральной шестерней, а вторая центральная шестерня выполнена полой и через вторую зубчатую муфту соединена с валом ротора второго электродвигателя и зацеплена с одними n сателлитами дифференциала, n=3, 4 ... i, установленными на водиле дифференциала, при этом первая центральная шестерня установлена в полости второй центральной шестерни и зацеплена с другими n сателлитами дифференциала, установленными на водиле дифференциала, при этом одни и другие сателлиты дифференциала зацеплены между собой попарно и установлены посредством подшипников третьей группы на осях сателлитов дифференциала, причем первая центральная шестерня расположена между двумя сферическими опорами, одна из которых установлена на основании, а другая - на водиле дифференциала, притом один конец водила дифференциала установлен в корпусе посредством подшипника, а другой его коней выполнен заодно с центральной шестерней первой планетарной зубчатой передачи, зацепленной с k сателлитами первой планетарной зубчатой передачи, где k=3, 4 ... j, на водиле первой планетарной зубчатой передачи со стороны дифференциала выполнено k выступов, на которых посредством подшипников четвертой группы установлены k сателлитов первой планетарной зубчатой передачи, а с другой стороны заодно с водилом первой планетарной зубчатой передачи выполнена центральная шестерня второй планетарной зубчатой передачи, водило второй планетарной зубчатой передачи выполнено с k выступами со стороны первой планетарной зубчатой передачи, на которых посредством подшипников пятой группы установлены k сателлитов второй планетарной зубчатой передачи, зацепленные с центральной шестерней второй планетарной зубчатой передачи, а с другой стороны заодно с водилом второй планетарной зубчатой передачи выполнена центральная шестерня третьей планетарной зубчатой передачи, при этом сателлиты первой и второй планетарных зубчатых передач зацеплены с внутренними зубьями общего зубчатого колеса, жестко связанного с корпусом, водило третьей планетарной зубчатой передачи выполнено с k выступами со стороны второй планетарной зубчатой передачи, на которых посредством подшипников шестой группы установлены k сателлитов третьей планетарной зубчатой передачи, зацепленные с центральной шестерней третьей планетарной зубчатой передачи, причем подшипники шестой группы установлены в отверстиях, выполненных в водиле третьей планетарной зубчатой передачи со стороны второй планетарной зубчатой передачи, а с другой стороны водило третьей планетарной зубчатой передачи выполнено заодно с выходным валом, опирающимся посредством подшипников седьмой группы на опору, сателлиты третьей планетарной зубчатой передачи зацеплены с внутренними зубьями венца опоры, причем между центральными шестернями первой, второй и третьей планетарных зубчатых передач и соответственно водилами первой, второй и третьей планетарных зубчатых передач размещены первая, вторая и третья опоры.
Третью планетарную зубчатую передачу предлагается выполнить безлюфтовой, в которой каждый сателлит состоит из двух шестерен, одна из которых выполнена заодно с валом, на валу посредством подшипников шестой группы установлена вторая шестерня, взаимодействующая посредством m пружин, где m=1, 2, ... g, с первой шестерней через зубья центрального колеса третьей планетарной зубчатой передачи и зубья венца опоры, причем пружины установлены перпендикулярно к оси вала и на заданном расстоянии от нее.
Конструктивно электропривод выполнен соосным, что упрощает его изготовление и сборку и уменьшает осевые габариты. Выполнение третьей планетарной зубчатой передачи, плавающей за счет крепления шестерен между собой предлагаемым образом, позволяет убрать угловой люфт между сателлитами и опорой и, как следствие, угловой люфт между валом и выходным валом.
Сущность изобретения поясним с помощью графических материалов, на которых приведены:
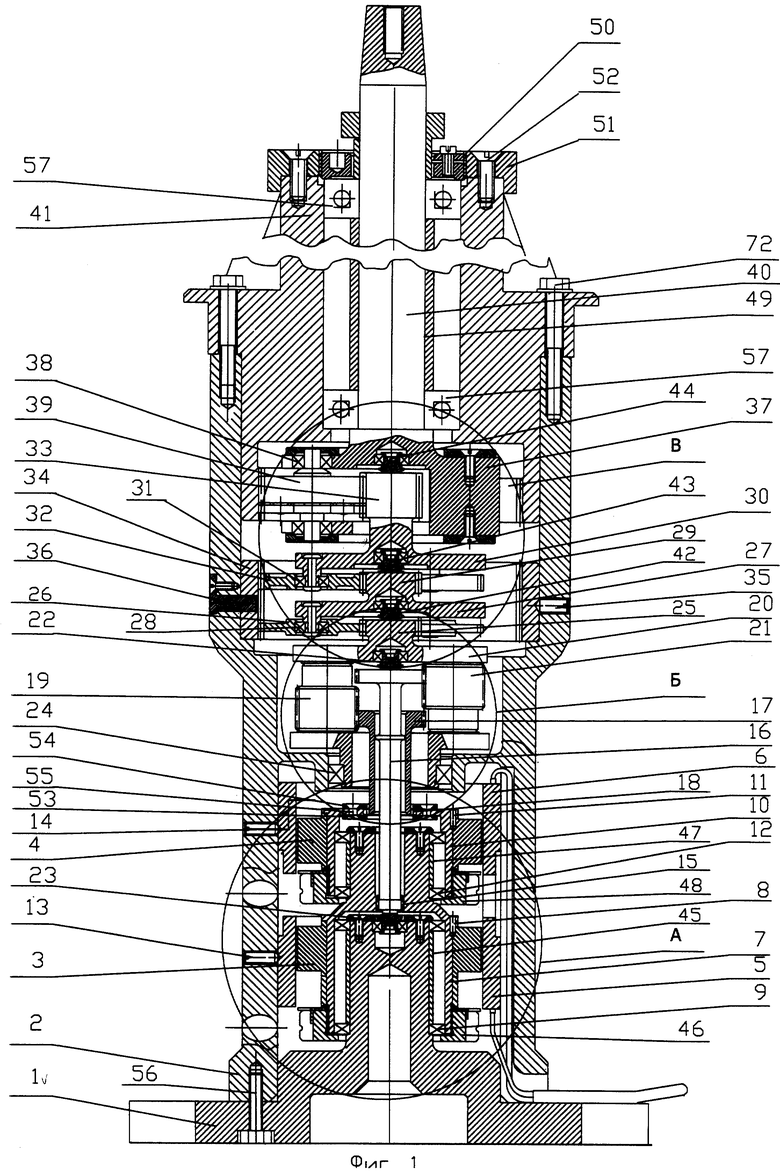
на фиг.1 - общий вид предлагаемого электропривода для создания крутящего момента;
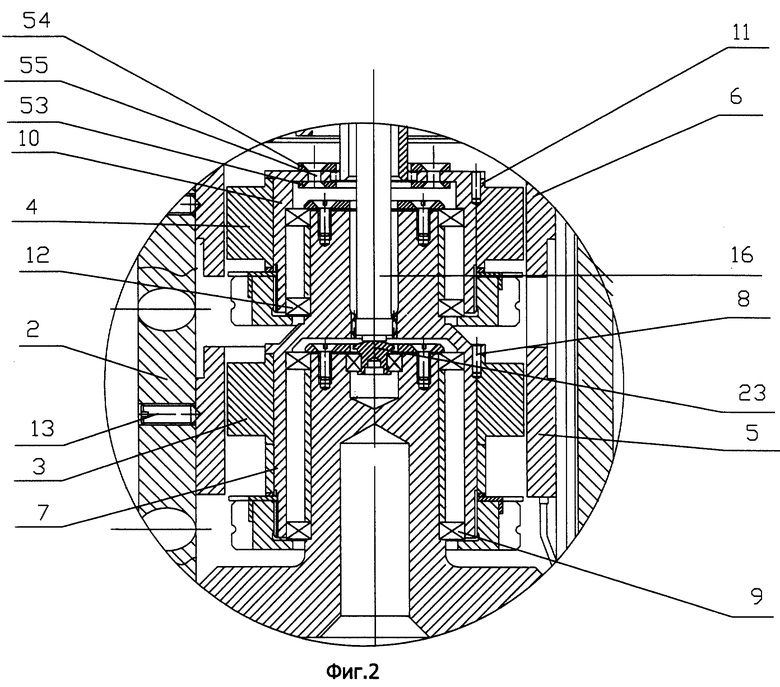
на фиг 2 - выносной элемент А (соединение двух электродвигателей);
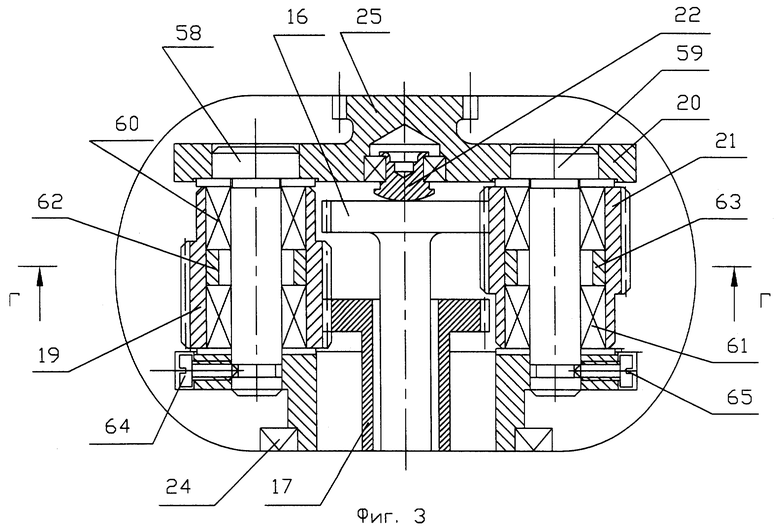
на фиг.3 - выносной элемент Б (дифференциал);
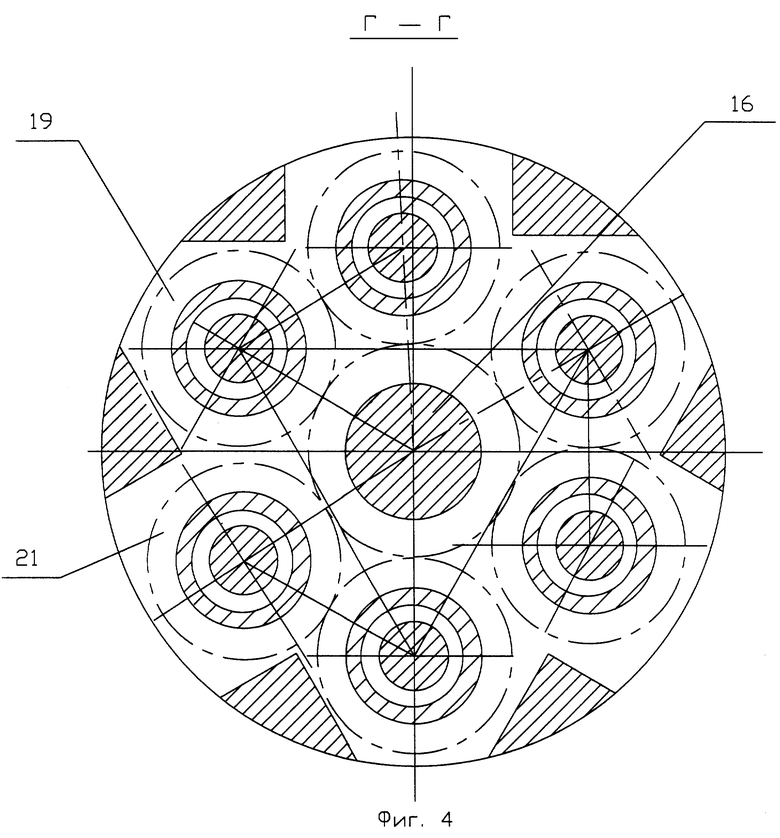
на фиг.4 - сечение дифференциала Г-Г;
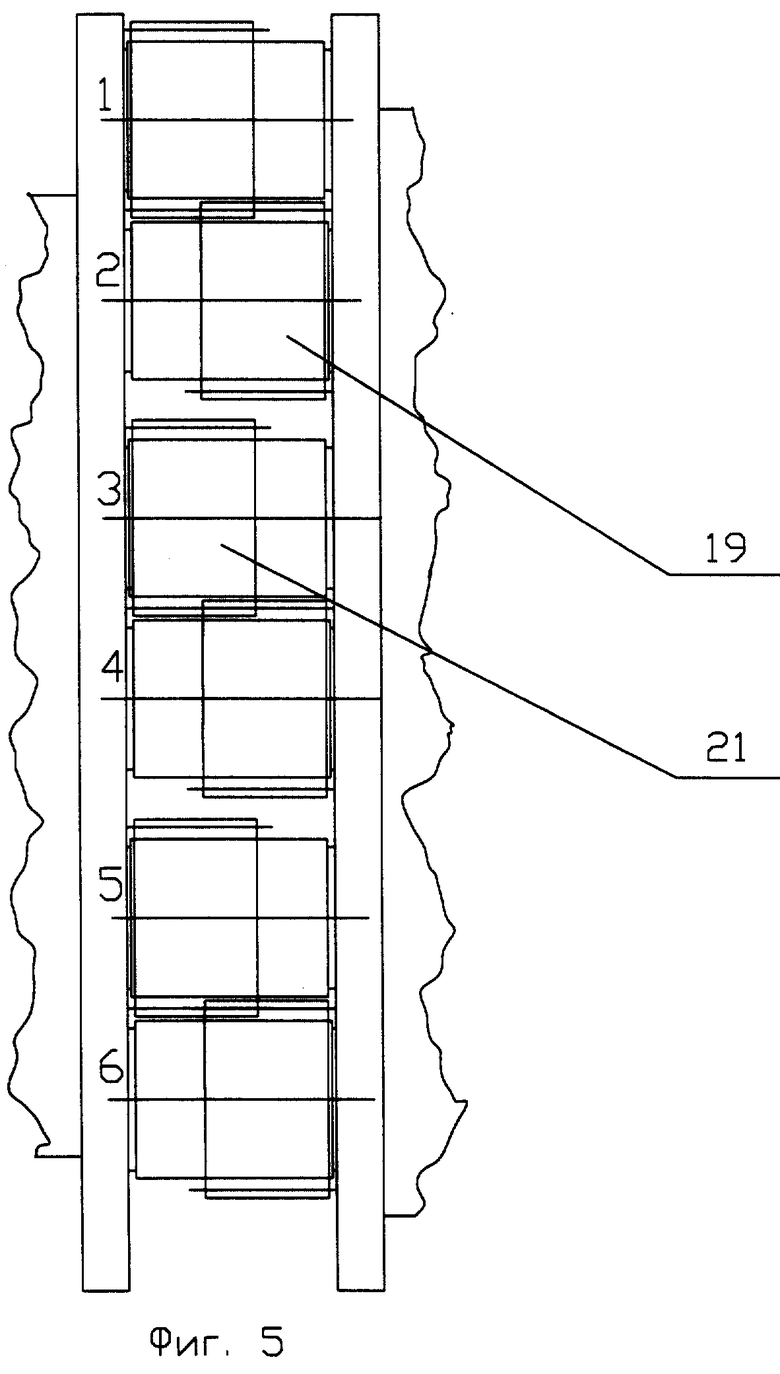
на фиг.5 - развертка дифференциала по сателлитам;
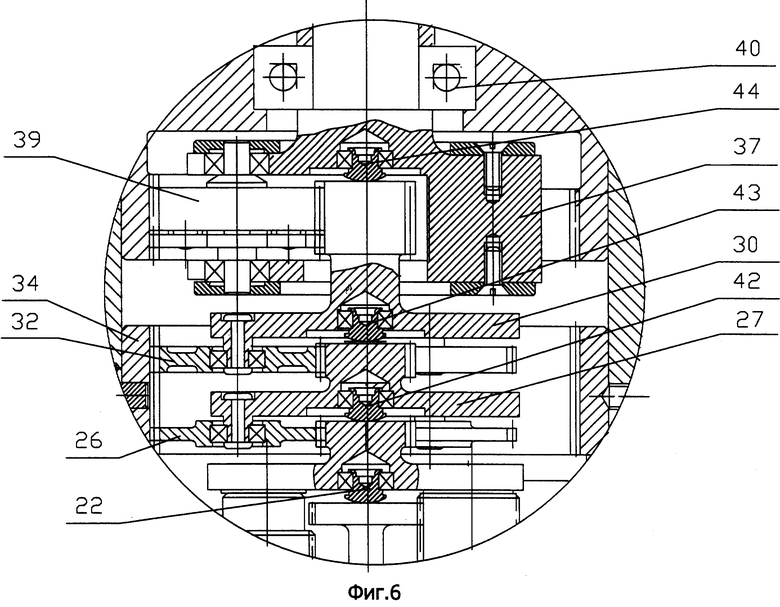
на фиг.6 - выносной элемент В (соединение трех планетарных передач);
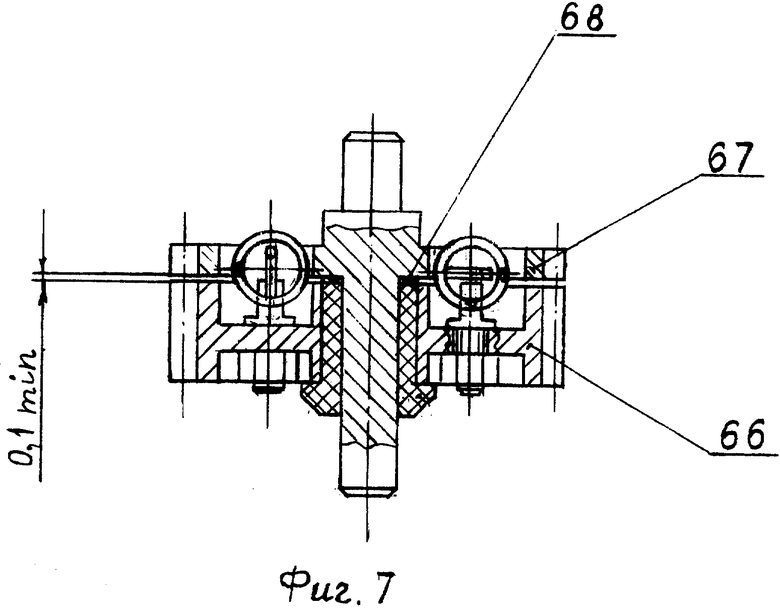
на фиг.7 - сечение шестерни третьей планетарной передачи;
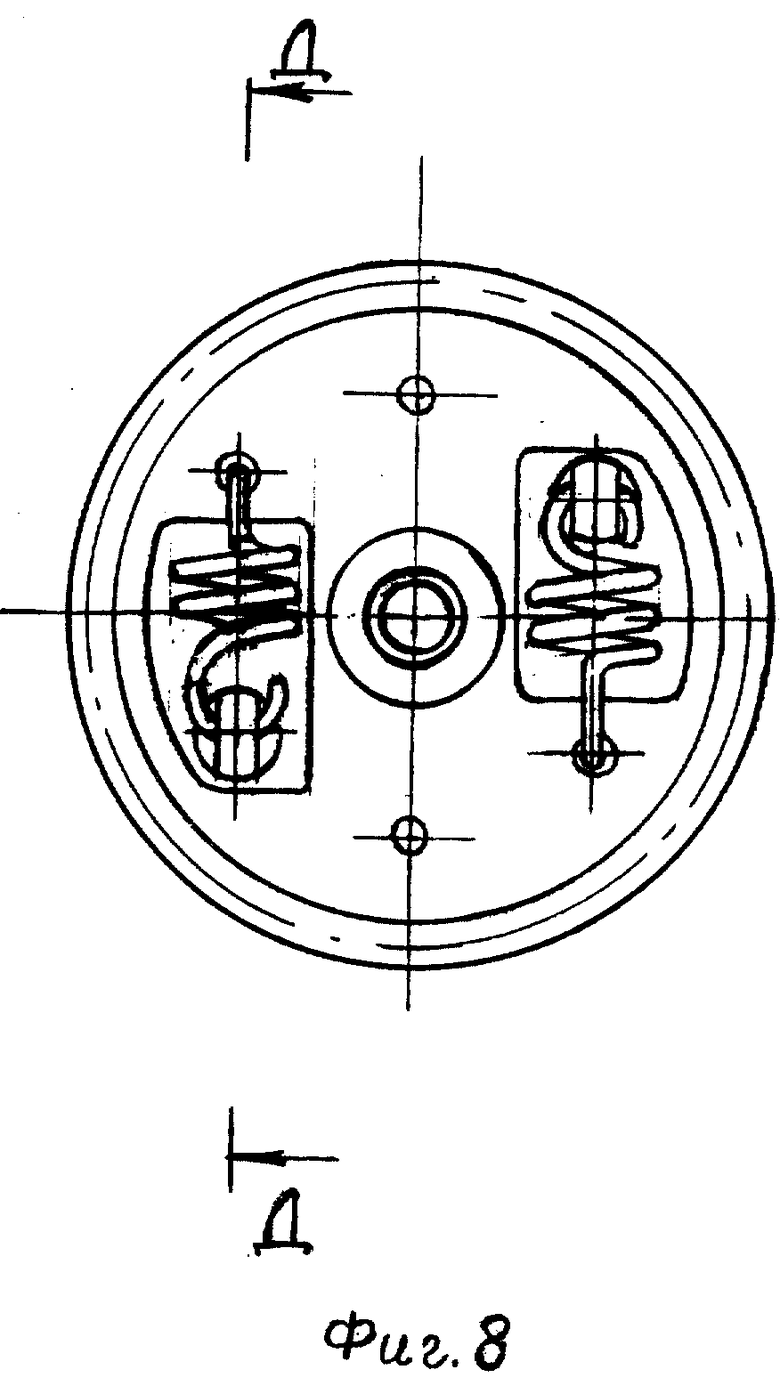
на фиг.8 - вид сверху шестерни;
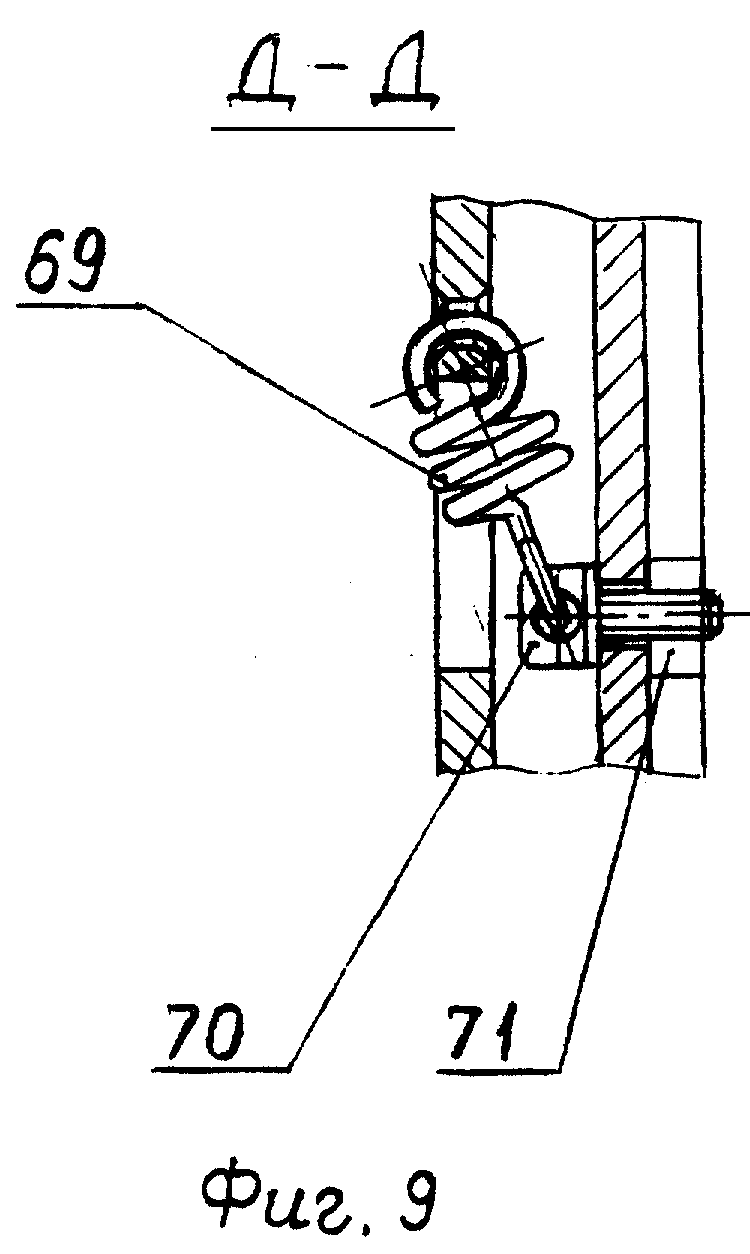
на фиг.9 - сечение пружины Д-Д.
Электропривод для создания крутящего момента состоит из установленного на основании 1 корпуса электропривода 2, в котором размещены два электродвигателя, состоящие из роторов 3, 4 и статоров 5, 6, соответственно.
Ротор 3 первого электродвигателя установлен на валу 7 ротора первого электродвигателя и жестко связан с валом 7 штифтом 8 (при этом вал ротора предлагается выполнить полым).
Вал 7 ротора первого электродвигателя смонтирован на двух подшипниках 9 первой группы, размещенных на основании 1.
Ротор 4 второго электродвигателя установлен на валу 10 ротора второго электродвигателя и жестко связан с валом 10 штифтом 11 (при этом вал ротора предлагается выполнить полым).
Вал 10 ротора второго электродвигателя оперт на вал ротора 7 первого электродвигателя посредством двух подшипников 12 второй группы, размещенных на валу 7 ротора первого электродвигателя.
Статоры 5, 6 обоих электродвигателей жестко соединены с корпусом 2 посредством винтов 13, 14.
Вал 7 ротора первого электродвигателя связан первой зубчатой муфтой с первой центральной шестерней 16, а вторая центральная шестерня 17 выполнена полой и через вторую зубчатую муфту 18 соединена с валом ротора второго электродвигателя и зацеплена с одними n сателлитами 19 дифференциала (n=3, 4, ... i, в рассмотренном примере n=3), установленными на водиле дифференциала. Первая центральная шестерня 16 установлена в полости второй центральной шестерни 17 и зацеплена с другими тремя сателлитами 21 дифференциала, установленными на водиле 20 дифференциала, при этом одни и другие сателлиты 19 и 21 дифференциала зацеплены между собой попарно. Первая центральная шестерня 16 размещена между двумя сферическими опорами 22 и 23, одна из которых установлена на основании 1, а другая - на водиле 20 дифференциала. Один конец водила 20 дифференциала установлен в корпусе 2 посредством подшипника 24, а другой его конец выполнен заодно с центральной шестерней 25 первой планетарной зубчатой передачи, зацепленной с k сателлитами первой планетарной зубчатой передачи, где k=3, 4 ... j.
На водиле 27 первой планетарной зубчатой передачи со стороны дифференциала выполнено k выступов, на которых посредством подшипников 28 четвертой группы установлены k сателлитов 26 первой планетарной зубчатой передачи, а с другой стороны заодно с водилом 27 первой планетарной зубчатой передачи выполнена центральная шестерня 29 второй планетарной зубчатой передачи. Водило 30 второй планетарной зубчатой передачи выполнено с k выступами со стороны первой планетарной зубчатой передачи, на которых посредством подшипников 31 пятой группы установлены k сателлитов 32 второй планетарной зубчатой передачи, зацепленные с центральной шестерней 29 второй планетарной зубчатой передачи, а с другой стороны заодно с водилом 30 второй планетарной зубчатой передачи выполнена центральная шестерня 33 третьей планетарной зубчатой передачи.
Сателлиты 26 первой и 32 второй планетарных зубчатых передач зацеплены с внутренними зубьями общего зубчатого колеса 34, жестко связанного с корпусом 2 посредством винтов 35 и пальца 36.
Водило 37 третьей планетарной зубчатой передачи выполнено с k выступами со стороны второй планетарной зубчатой передачи, на которых посредством подшипников 38 шестой группы установлены k сателлитов 39 третьей планетарной зубчатой передачи, зацепленные с центральной шестерней 33 третьей планетарной зубчатой передачи.
Подшипники 38 шестой группы установлены в отверстиях, выполненных в водиле 37 третьей планетарной зубчатой передачи со стороны второй планетарной зубчатой передачи, а с другой стороны водило 37 третьей планетарной зубчатой передачи выполнено заодно с выходным валом 40, установленный внутри опоры 41.
Сателлиты 39 третьей планетарной зубчатой передачи зацеплены с внутренними зубьями венца опоры 41.
Между центральной шестерней 25 первой планетарной зубчатой передачи и водилом 27 первой планетарной зубчатой передачи размещена первая опора 42; между центральной шестерней 29 второй планетарной передачи и водилом 30 второй планетарной зубчатой передачи размещена вторая опора 43; между центральной шестерней 33 третьей планетарной зубчатой передачи размещена третья опора 44. При этом на первой, второй и третьей опорах 42, 43 и 44 со стороны венцов выполнены сферические выступы, взаимодействующие с водилами 27, 30 и 37 первой, второй и третьей планетарных передач соответственно.
Между подшипниками 9 первой группы установлена первая втулка 45, при этом подшипники 9 первой группы удерживаются в осевом направлении с одной стороны уступом вала 7 ротора первого электродвигателя, а с другой стороны - буртом первой гайки 46. Между подшипниками 12 второй группы установлена вторая втулка 47, при этом подшипники 12 второй группы удерживаются в осевом направлении уступом вала 10 ротора второго электродвигателя, а с другой стороны - буртом второй гайки 48.
Между подшипниками 57 седьмой группы установлена третья втулка 49, при этом верхний подшипник запирается третьей гайкой 50, которая соединена резьбовым соединением с крышкой 51. Крышка 51 жестко соединена с опорой 41 посредством винтов 52.
Зубчатая муфта 18 жестко зафиксирована на валу 10 ротора второго электродвигателя с помощью крышек 53, 54 и заклепок 55. Корпус 2 жестко установлен на основании 1 посредством первых болтов 56.
Выходной вал 40 опирается на опору 41 посредством подшипников 57 седьмой группы.
При этом опора 41 жестко связана с корпусом 2 посредством вторых болтов 72.
При этом из фиг.3 видно, что одни 19 и другие 21 сателлиты установлены соответственно на осях 58 и 59, на которые опираются подшипники 60 и 61 третьей группы, между которыми расположены четвертые втулки 62, 63 (всего шесть по количеству сателлитов), причем оси 58 и 59 застопорены первыми и вторыми винтами 64, 65 соответственно.
Третья планетарная зубчатая передача выполнена безлюфтовой, каждый сателлит 39 которой состоит из двух шестерен 66 и 67, одна из которых шестерня 66 выполнена заодно с валом 68. На валу 68 посредством подшипников 38 шестой группы установлена другая шестерня 67, взаимодействующая посредством m пружин 69, где m=l,2,...g, с одной шестерней 66, через зубья центрального колеса 33 третьей планетарной зубчатой передачи и зубья венца опоры 41, причем пружины 69 установлены перпендикулярно к оси вала и симметрично относительно нее.
Одна и другая шестерни 66 и 67 крепятся между собой следующим образом: в одной из шестерен 66 установлен третий винт 70, головка которого обращена к другой шестерне 67, закрепленный с противоположной стороны третьей гайкой 71, при этом в головке винта 70 выполнено отверстие, в которое продет один конец пружины растяжения 69, зацепленный за третий винт 70, а другой конец продет в отверстие, выполненной в шестерне 67. Аналогичным образом выполнено еще два узла крепления этих шестерен.
В корпусе 2, который установлен на основании 1, размещены два электродвигателя. При подаче напряжения на статор 5 первого электродвигателя в обмотках статора 5 образуется электромагнитное поле, которое, взаимодействуя с постоянными магнитами ротора 3 первого электродвигателя, поворачивает его вместе с валом 7 ротора первого электродвигателя на подшипниках 9 первой группы вокруг оси основания 1.
Вал 7 ротора первого электродвигателя опирается на основание 1 посредством двух подшипников 9, что облегчает вращение вала 7 ротора первого электродвигателя.
Подшипники качения имеют преимущества по сравнению с подшипниками скольжения: меньше трение в момент пуска и при умеренных скоростях вращения; примерно в 2-3 раза меньше осевые габариты; проще условия обслуживания и смазки; ниже стоимость; взаимозаменяемы.
Подшипники качения 9 облегчают вращение вала 7 ротора и соосность между валом 7 ротора и статором 5 первого электродвигателя.
Вращение с вала 7 ротора первого электродвигателя передается через первую зубчатую муфту 15 на первую центральную шестерню 16 дифференциала, которая через оси 59 приводит во вращение сателлиты 21 дифференциала, от которых вращение передается на сателлиты 19 дифференциала (рассмотрим пример с шестью сателлитами - тремя парами), которые, в свою очередь, обкатываются вокруг второй (полой) центральной шестерни 17 и вращают водило 20 дифференциала со скоростью в 2 раза меньшей, чем скорость, с которой вращается первая центральная шестерня 16. Вращение от первой центральной шестерни 25 первой планетарной зубчатой передачи передается на сателлиты 26 первой планетарной зубчатой передачи, которые обкатываются по общему зубчатому колесу 34, передавая вращение, через выступы водила 27 первой планетарной зубчатой передачи на вторую центральную шестерню 29 второй планетарной зубчатой передачи. Вращение от второй центральной шестерни 29 второй планетарной зубчатой передачи передается на сателлиты 32 второй планетарной зубчатой передачи, которые обкатываются по общему зубчатому колесу 34, передавая вращение через выступы водила 30 второй планетарной зубчатой передачи на третью центральную шестерню 33 третьей планетарной зубчатой передачи, а вращение от третьей центральной шестерни 33 третьей планетарной зубчатой передачи передается на сателлиты 39 третьей планетарной зубчатой передачи, которые обкатываются по венцу опоры 41, передавая вращение, через вал 68 на водило 37 третьей планетарной зубчатой передачи и выходной вал 40.
При подаче напряжения на статор 6 второго электродвигателя в обмотках статора 6 образуется электромагнитное поле, которое взаимодействует с постоянными магнитами ротора 4 второго электродвигателя и поворачивает его вместе с валом 10 ротора второго электродвигателя на подшипниках 12 второй группы вокруг оси вала 7 ротора первого электродвигателя.
Вращение с вала 10 ротора второго электродвигателя передается через вторую зубчатую муфту 18 на вторую центральную шестерню 17 дифференциала, которая через оси 58 приводит во вращение сателлиты 19 дифференциала, от которых вращение передается на сателлиты 21 дифференциала (рассмотрим пример с шестью сателлитами - тремя парами), которые, в свою очередь, обкатываются вокруг первой центральной шестерни 16 и вращают водило 20 дифференциала со скоростью в 2 раза меньшей, чем скорость, с которой вращается вторая центральная шестерня 17. Вращение от первой центральной шестерни 25 первой планетарной зубчатой передачи передается на сателлиты 26 первой планетарной зубчатой передачи, которые обкатываются по общему зубчатому колесу 34, передавая вращение, через выступы водила 27 первой планетарной зубчатой передачи на вторую центральную шестерню 29 второй планетарной зубчатой передачи. Вращение от второй центральной шестерни 29 второй планетарной зубчатой передачи передается на сателлиты 32 второй планетарной зубчатой передачи, которые обкатываются по общему зубчатому колесу 34, передавая вращение через выступы водила 30 второй планетарной зубчатой передачи на третью центральную шестерню 33 третьей планетарной зубчатой передачи, а вращение от третьей центральной шестерни 33 третьей планетарной зубчатой передачи передается на сателлиты 39 третьей планетарной зубчатой передачи, которые обкатываются по венцу опоры 41, передавая вращение через вал 68 на водило 37 третьей планетарной зубчатой передачи и выходной вал 40.
При подаче напряжений одной полярности на статоры 5 и 6 первого и второго электродвигателей роторы 3 и 4 первого и второго электродвигателей будут вращаться в одном направлении и передавать вращение соответственно через первую и вторую зубчатые муфты 15 и 18 одновременно на первую и вторую центральные шестерни дифференциала 16 и 17, которые через сателлиты 19 и 21 и их оси 58 и 59 будут передавать вращение на центральную шестерню 25 первой планетарной зубчатой передачи со скоростью, равной скорости вращения первой и второй центральных шестерен 16 и 17 дифференциала, с которых вращение передается аналогично описанной выше последовательностью на выходной вал 40. При этом скорость выходного вала будет выше в 2 раза, чем скорость при работе одного из электродвигателей.
Выполнение третьей планетарной зубчатой передачи, плавающей за счет крепления шестерен между собой предлагаемым образом, позволяет убрать люфт между сателлитами 39 и опорой 41.
Расчет показал, что система из трех планетарных зубчатых передач увеличивает передаточное отношение редуктора, что в свою очередь позволяет уменьшить число оборотов, а следовательно, приводит к повышению кпд.
Рассмотренное применение привода, на котором, например, установлена платформа, приводимая им в движение, используется для имитации вращательных движений с разными угловыми скоростями различных механизмов летательных аппаратов, а также может быть использована в иной области промышленности, например в тренажерах.
Литература
1. Кудрявцев В.Н. Планетарные передачи. - Л.: 1966, с.247-248, рис. 133 и 134.
2. Патент РФ 2065542, МПК6 F 16 H 3/44, публ. 20.08.96 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2307278C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| ДВУХСТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ РАЗДАТОЧНАЯ КОРОБКА | 2003 |
|
RU2248891C1 |
| ГЛАВНАЯ ПЕРЕДАЧА | 1998 |
|
RU2142885C1 |
| Мотор-колесо транспортного средства | 2024 |
|
RU2830225C1 |
| ВЕДУЩИЙ УПРАВЛЯЕМЫЙ МОСТ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2468936C2 |
| Мотор-колесо транспортного средства | 2023 |
|
RU2813165C1 |
| ТРАНСМИССИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТА | 2019 |
|
RU2730094C1 |
| СПОСОБ РАБОТЫ ЭЛЕКТРОПРИВОДА С ТРЕХСТУПЕНЧАТЫМ ПЛАНЕТАРНЫМ РЕДУКТОРОМ | 2011 |
|
RU2465496C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С ИЗМЕНЯЕМЫМ УСИЛИЕМ НА НЕПОДВИЖНОМ ОСНОВНОМ ЗВЕНЕ | 2005 |
|
RU2304732C2 |
Изобретение относится к приборостроению, может быть использовано, например, для сообщения вращательного движения различным механизмам летательных аппаратов. Электропривод содержит первый и второй электродвигатели, планетарные зубчатые передачи и дифференциал. Статоры 5, 6 электродвигателей жестко соединены с корпусом 2 электропривода. Вал 7 ротора 3 первого электродвигателя установлен на основании 1 и связан муфтой с центральной шестерней 16 дифференциала. Вал 10 ротора 4 второго электродвигателя оперт на вал 7 ротора 3 и связан муфтой с полой центральной шестерней 17 дифференциала, зацепленной с сателлитами 21. Центральная шестерня 16 установлена в полости центральной шестерни 17 и зацеплена с сателлитами 19. Сателлиты 19 и 21 зацеплены между собой попарно. Центральная шестерня 16 расположена между двумя сферическими опорами 22 и 23. Водила 20, 27, 30 дифференциала, первой и второй планетарных зубчатых передач выполнены заодно соответственно с центральными шестернями 25, 29,33 первой, второй и третьей планетарных зубчатых передач. Сателлиты 26 и 32 зацеплены с общим зубчатым колесом 34, жестко связанным с корпусом 2. Водило 37 третьей планетарной зубчатой передачи выполнено заодно с выходным валом 40. Между центральными и шестернями 25, 29, 33 и соответственно водилами 27, 30, 37 размещены первая 42, вторая 43 и третья 44 опоры. Технический результат - упрощение изготовления и сборки электропривода, повышение КПД и уменьшение осевых габаритов. 1 з.п. ф-лы, 9 ил.
| УСТРОЙСТВО ДЛЯ СООБЩЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 1988 |
|
RU2065542C1 |
| Цилиндрический дифференциал | 1981 |
|
SU1044869A1 |
| КОГАН И.Я | |||
| “Строительные башенные краны” | |||
| - M.: Машиностроение, 1971, с.119, рис | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |

