Перекрестная ссылка на родственную заявку
Настоящее изобретение притязает на приоритет по предварительной заявке на патент США № 61/086539, озаглавленной “Обратно совместимые конструкции общего RS DL для распределенной MIMO”, поданной 6 августа 2008 г., которая заключена в настоящее описание посредством ссылки.
Уровень техники
Область техники, к которой относится изобретение
Следующее описание, в целом, относится к беспроводной связи и, более конкретно, к системам и методикам для обработки помех в беспроводной связи.
Уровень техники
Беспроводные системы связи широко применяются, чтобы предоставлять различные типы контента связи, такого как например, речь, данные и т.д. Типичные беспроводные системы связи могут быть системами множественного доступа, которые могут поддерживать связь с множеством пользователей с помощью совместного использования имеющихся системных ресурсов (например, полосы пропускания, мощности передачи и т.д.). Примеры таких систем множественного доступа могут включать в себя системы множественного доступа с кодовым разделением (CDMA), системы множественного доступа с временным разделением (TDMA), системы множественного доступа с частотным разделением (FDMA), системы множественного доступа с ортогональным частотным разделением (OFDMA) и тому подобные. Кроме того, системы могут соответствовать спецификациям, таким как Проект партнерства третьего поколения (3GPP), долгосрочное развитие (LTE) 3GPP, сверхмобильная широкополосная передача (UMB) и/или беспроводным спецификациям с множеством несущих, таким как развитие оптимизированных данных (EV-DO), одной или более их версиям и т.д.
Обычно беспроводные системы связи множественного доступа могут одновременно поддерживать связь для множества подвижных устройств. Каждое подвижное устройство может связываться с одной или более базовыми станциями с помощью передач в прямой и обратной линиях связи. Прямая линия связи (или нисходящая линия связи) относится к линии связи из базовых станций в подвижные устройства, а обратная линия связи (или восходящая линия связи) относится к линии связи из подвижных устройств в базовые станции. Кроме того, связь между подвижными устройствами и базовыми станциями может быть установлена с помощью систем с одним входом и одним выходом (SISO), систем с множеством входов и одним выходом (MISO), систем с множеством входов и множеством выходов (MIMO) и т.д. Кроме того, подвижные устройства могут связываться с другими подвижными устройствами (и/или базовые станции с другими базовыми станциями) в конфигурациях одноранговой беспроводной сети.
Разбиение на секторы является классическим путем улучшения пропускной способности системы с помощью разделения одной базовой станции на три соты. В предыдущих системах на основе сот одна направленная антенна с фиксированной диаграммой направленности была использована, чтобы фокусировать мощность передачи в соте и уменьшать помехи, вызванные в другие соты. В последнее время введены системы MIMO с множеством антенн передачи (ТХ), чтобы генерировать направленные фиксированные диаграммы направленности, чтобы охватывать соты. Несмотря на эти улучшения, многие подвижные устройства по-прежнему испытывают помехи между сотами на краях сот.
Сущность изобретения
Следующее представляет упрощенную сущность одного или более аспектов, для того чтобы предоставить основное понимание таких аспектов. Эта сущность не является широким обзором всех предполагаемых аспектов и не предназначена ни идентифицировать ключевые или критические элементы всех аспектов, ни очерчивать рамки объема любого или всех аспектов. Ее единственной целью является представить некоторые концепции одного или более аспектов в упрощенной форме в качестве вступления к более подробному описанию, которое представлено позже.
В одном аспекте раскрытия устройство для беспроводной связи включает в себя средство для предоставления зоны покрытия для первой соты посредством первой системы антенн, средство для предоставления зоны покрытия для второй соты посредством второй системы антенн и средство для обработки данных для передачи в подвижное устройство в первой соте с использованием первой и второй систем антенн.
В другом аспекте раскрытия способ для беспроводной связи включает в себя предоставление зоны покрытия для первой соты посредством первой системы антенн, предоставление зоны покрытия для второй соты посредством второй системы антенн и обработку данных для передачи в подвижное устройство в первой соте с использованием первой и второй систем антенн.
Еще в одном аспекте раскрытия устройство для беспроводной связи включает в себя систему обработки, сконфигурированную для предоставления зоны покрытия для первой соты посредством первой системы антенн, предоставления зоны покрытия для второй соты посредством второй системы антенн и обработки данных для передачи в подвижное устройство в первой соте с использованием первой и второй систем антенн.
В дополнительном аспекте раскрытия компьютерный программный продукт, содержащий инструкции, исполняемые с помощью одного или более процессоров, инструкции содержат код для предоставления зоны покрытия для первой соты посредством первой системы антенн, код для предоставления зоны покрытия для второй соты посредством второй системы антенн и код для обработки данных для передачи в подвижное устройство в первой соте с использованием первой и второй систем антенн.
Для выполнения вышеупомянутых и связанных целей один или более аспектов содержат признаки, полностью описанные далее в настоящей заявке, и, в частности, отмеченные в формуле изобретения. Следующее описание и прилагаемые чертежи подробно приводят определенные иллюстративные признаки одного или более аспектов. Однако эти признаки являются указывающими только некоторые из различных путей, которыми могут быть использованы принципы различных аспектов, и подразумевается, что это описание должно включать в себя все такие аспекты и их эквиваленты.
Краткое описание чертежей
Фиг.1 иллюстрирует аспекты беспроводной системы связи множественного доступа.
Фиг.2 иллюстрирует аспекты базовой станции и подвижного устройства в беспроводной системе связи множественного доступа.
Фиг.3 иллюстрирует аспекты структуры кадра для беспроводной системы связи множественного доступа.
Фиг.4 иллюстрирует аспекты беспроводной системы связи множественного доступа с подвижным устройством на краю соты.
Фиг.5 иллюстрирует аспекты беспроводной системы связи множественного доступа с двумя подвижными устройствами на краях их соответственных сот.
Фиг.6 иллюстрирует аспекты беспроводной системы связи множественного доступа с базовой станцией, имеющей две антенны ТХ, и подвижным устройством на краю соты.
Фиг.7 иллюстрирует аспекты распределенной системы антенн в беспроводной системе связи множественного доступа с подвижным устройством на краю соты.
Фиг.8 иллюстрирует аспекты беспроводной системы связи множественного доступа с двумя подвижными устройствами на краях их соответственных сот.
Фиг.9 иллюстрирует аспекты беспроводной системы связи множественного доступа с базовой станцией, имеющей две антенны ТХ, и двумя подвижными устройствами на краях их соответственных сот.
Фиг.10 иллюстрирует аспекты распределенной системы антенн в беспроводной системе связи множественного доступа, причем системы антенн используют две антенны ТХ и два подвижных устройства на краях их соответственных сот.
Фиг.11 иллюстрирует аспекты, относящиеся к функциональным возможностям базовой станции.
Подробное описание изобретения
Различные варианты осуществления теперь описаны со ссылкой на чертежи, на которых одинаковые ссылочные номера использованы таким образом, чтобы ссылаться к одинаковым элементам по всем чертежам. В следующем описании для целей объяснения приведены многочисленные специфичные детали, для того чтобы предоставить полное понимание одного или более вариантов осуществления. Однако может быть очевидным, что такой вариант осуществления (варианты осуществления) может быть осуществлен без этих специфичных деталей. В других случаях широко известные структуры и устройства изображены в виде блок-схемы, для того чтобы облегчить описание одного или более вариантов осуществления.
Подразумевают, что использованные в настоящей заявке понятия “компонент”, “модуль”, “система” и тому подобные относятся к объекту, связанному с компьютером, либо аппаратному обеспечению, программно-аппаратному обеспечению, комбинации аппаратного обеспечения и программного обеспечения, программному обеспечению, либо исполняемому программному обеспечению. Например, компонент может быть процессом, запущенным в процессоре, процессором, объектом, исполняемым файлом, потоком исполнения, программой и/или компьютером, но не является ограниченным ими. В качестве иллюстрации, как приложение, запущенное в вычислительном устройстве, так и вычислительное устройство может быть компонентом. Один или более компонентов могут находиться в процессе и/или потоке исполнения, а компонент может быть локализован в компьютере и/или распределен между двумя или более компьютерами. Кроме того, эти компоненты могут исполняться с различных компьютерно-читаемых носителей, имеющих сохраненные на них различные структуры данных. Компоненты могут связываться через локальные и/или удаленные процессы, как, например, в соответствии с сигналом, имеющим один или более пакетов данных (например, данные из одного компонента, взаимодействующие с другим компонентом в локальной системе, распределенной системе и/или через сеть, такую как интернет, с другими системами через сигнал).
Кроме того, различные варианты осуществления описаны в настоящей заявке в связи с подвижным устройством. Подвижное устройство также может быть названо системой, абонентским устройством, абонентской станцией, подвижной станцией, подвижным устройством, удаленной станцией, удаленным терминалом, терминалом доступа, пользовательским терминалом, беспроводным устройством связи, пользовательским агентом, пользовательским устройством или пользовательским оборудованием (UE). Подвижное устройство может быть сотовым телефоном, смартфоном, беспроводным телефоном, телефоном протокола инициирования сеанса (SIP), портативным переносным компьютером, спутниковой радиостанцией, глобальной системой позиционирования, станцией беспроводной местной линии (WLL), персональным цифровым ассистентом (PDA), карманным устройством, имеющим функциональные возможности беспроводной связи, вычислительным устройством или другим устройством, соединенным с беспроводным модемом. Кроме того, различные варианты осуществления описаны в настоящей заявке в связи с базовой станцией. Базовая станция может быть использована для связи с подвижным устройством (устройствами) и также может быть упомянута как пункт доступа, узел В, развитый узел В (e-NodeB или eNB), базовая приемопередающая станция (BTS) или некоторая другая терминология.
Методики, описанные в настоящей заявке, могут быть использованы для различных беспроводных систем связи, таких как множественного доступа с кодовым разделением (CDMA), множественного доступа с временным разделением (TDMA), множественного доступа с частотным разделением (FDMA), множественного доступа с ортогональным частотным разделением (OFDMA), мультиплексирования в частотной области с одной несущей (SC-FDMA), и других систем. Понятия “система” и “сеть” часто используют взаимозаменяемо. Система CDMA может осуществлять технологию радиосвязи, такую как универсальный наземный радиодоступ (UTRA), CDMA2000, и т.д. UTRA включает в себя широкополосный CDMA (W-CDMA) и другие варианты CDMA. CDMA2000 охватывает стандарты IS-2000, IS-95 и IS-856. Система TDMA может осуществлять технологию радиосвязи, такую как глобальная система мобильной связи (GSM). Система OFDMA может осуществлять технологию радиосвязи, такую как развитая UTRA (Е-UTRA), сверхмобильная широкополосная передача (UMB), IEEE 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802.20, Flash-OFDM® и т.д. UTRA и Е-UTRA являются частью универсальной мобильной телекоммуникационной системы (UMTS). Долгосрочное развитие (LTE) 3GPP является новой версией, которая использует OFDMA в нисходящей линии связи и SC-FDMA в восходящей линии связи. UTRA, Е-UTRA, UMTS, LTE и GSM описаны в документах из организации под названием “Проект партнерства 3-го поколения” (3GPP). CDMA2000 и UMB описаны в документах из организации под названием “Проект партнерства 3-го поколения 2” (3GPP2). Методики, описанные в настоящей заявке, также могут быть использованы в стандартах развития оптимизированных данных (EV-DO), таких как редакция В 1xEV-DO или другие редакции, и/или тому подобных. Кроме того, такие беспроводные системы связи могут дополнительно включать в себя одноранговые (например, подвижная станция с подвижной станцией) самоорганизующиеся сетевые системы, часто использующие непарные нелицензированные спектры, беспроводную LAN 802.хх, BLUETOOTH и любые другие методики беспроводной связи короткого и длинного диапазона.
Различные аспекты или признаки будут представлены в понятиях систем, которые могут включать в себя определенное число устройств, компонентов, модулей и тому подобного. Следует понимать и принимать во внимание, что различные системы могут включать в себя дополнительные устройства, компоненты, модули и т.д. и/или могут не включать в себя все из устройств, компонентов, модулей и т.д., обсужденных в связи с фигурами. Также может быть использована комбинация этих устройств.
Различные аспекты беспроводной системы связи множественного доступа теперь будут представлены со ссылкой на фиг.1. Беспроводная система 100 связи изображена с базовой станцией 102. Базовая станция 102 может включать в себя несколько приемопередатчиков (не изображены), которые позволяют ей обслуживать каждую соту 104 с помощью разной системы 106 антенн. Каждая система 106 антенн изображена как одна направленная антенна, но может быть осуществлена как устройство элементов антенн, действующих совместно, чтобы формировать направленную диаграмму направленности. Базовая станция 102 изображена на связи с тремя подвижными устройствами 108, одним устройством в каждой соте 104. Однако следует понимать, что базовая станция 102 может связываться по существу с любым числом подвижных устройств. Как изображено, базовая станция 102 использует систему 106i антенн, чтобы связываться с подвижным устройством 108i в соте 104i, систему 106j антенн, чтобы связываться с подвижным устройством 108j в соте 104j, и систему 106k антенн, чтобы связываться с подвижным устройством 108k в соте 104k.
В качестве альтернативы система 106 антенн может быть системой антенн MIMO. Система антенн MIMO использует множество (N
T) антенн ТХ и множество (N
R) антенн приема (RX) для передачи данных. Канал MIMO, сформированный с помощью N
T антенн ТХ и N
R антенн RX, может быть разложен на N
S независимых каналов, которые также упоминают как пространственные каналы, где  . Каждый из N
S независимых каналов соответствует измерению. Система MIMO может предоставлять улучшенную производительность (например, более высокую пропускную способность и/или большую надежность), если используют дополнительные измерения, созданные с помощью множества антенн TX и RX. Система MIMO может использовать по существу любой тип методики дуплексной связи, чтобы разделять каналы восходящей линии связи и нисходящей линии связи, такой как FDD, FDM, TDD, TDM, CDM, OFDM и тому подобные.
. Каждый из N
S независимых каналов соответствует измерению. Система MIMO может предоставлять улучшенную производительность (например, более высокую пропускную способность и/или большую надежность), если используют дополнительные измерения, созданные с помощью множества антенн TX и RX. Система MIMO может использовать по существу любой тип методики дуплексной связи, чтобы разделять каналы восходящей линии связи и нисходящей линии связи, такой как FDD, FDM, TDD, TDM, CDM, OFDM и тому подобные.
Теперь будут представлены различные аспекты базовой станции на связи с подвижным устройством со ссылкой на фиг.2. В базовой станции 102 данные для определенного числа потоков данных предоставляют из источника 212 данных в систему 213 обработки. Система 213 обработки включает в себя процессор 214 данных передачи (ТХ), процессор MIMO передачи (ТХ), процессор 230, память 232 и процессор 242 данных RX. Каждый поток данных может быть передан через соответственную систему 224 антенн. Для простоты объяснения изображена одна система 224 антенн для обслуживания одной соты. Однако, как без труда поймут специалисты в данной области техники, базовая станция 102 может использовать отельную систему антенн для каждой соты. В этом примере система 224 антенн является системой антенн MIMO, которая может поддерживать множество потоков данных с помощью использования множества пространственных каналов. В качестве альтернативы система 224 антенн может быть составлена из одной направленной антенны или множества элементов антенн. Отдельный передатчик (TMTR)/приемник (RCVR) 222 предоставлен из каждой антенны 224 в системе.
Процессор 214 данных ТХ форматирует, кодирует и перемежевывает данные для каждого потока данных на основании конкретной схемы кодирования, выбранной для этого потока данных, чтобы предоставить закодированные данные. Закодированные данные для каждого потока данных могут быть мультиплексированы с данными опорного сигнала с использованием OFDM или других методик ортогональности и не ортогональности. Опорный сигнал, который иногда упоминают как пилот-сигнал, сигнал маяка или тому подобное, обычно является известного шаблона данных, который обрабатывают известным способом, и он может быть использован в подвижном устройстве 108, чтобы оценивать отклик канала. Мультиплексированный опорный сигнал и закодированные данные для каждого потока данных затем модулируют (т.е. отображают в символы) на основании одной или более конкретных схем модуляции (например, BPSR, QPSK, M-PSK или M-QAM), выбранной для этого потока данных, чтобы предоставить символы модуляции. Скорость передачи данных, кодирование и модуляция для каждого потока данных могут быть определены с помощью процессора 230.
Символы модуляции для всех потоков данных затем предоставляют в процессор 220 MIMO TX, который предоставляет пространственную обработку для символов модуляции (например, для OFDM). Затем процессор 220 MIMO TX предоставляет N T потоков символов модуляции (или пространственных потоков) в N T передатчиков (TMTR) 222а по 222t. Каждый TMTR 222 принимает и обрабатывает соответственный поток символов, чтобы предоставить один или более аналоговых сигналов, и дополнительно приводит в надлежащее состояние (например, усиливает, фильтрует и преобразует с повышением частоты) аналоговые сигналы, чтобы предоставить модулированный сигнал, подходящий для передачи через канал MIMO. Затем N T модулированных сигналов из TMTR 222а по 222t передают из N T антенн 224а по 1224t соответственно.
В подвижном устройстве 108 переданные модулированные сигналы принимают с помощью N R антенн 252а по 252r, и принятый сигнал из каждой антенны 252 предоставляют в соответственный RCVR 254а по 254r. Каждый RCVR 254 приводит в надлежащее состояние (например, фильтрует, усиливает и преобразует с понижением частоты) соответственный принятый сигнал, квантует приведенный в надлежащее состояние сигнал, чтобы предоставить выборки, и дополнительно обрабатывает выборки, чтобы предоставить соответствующий “принятый” поток символов.
Затем процессор 260 данных приема (RX) принимает и обрабатывает N R принятых потоков символов из N R RCVR 254 на основании методики обработки конкретного приемника, чтобы предоставить N T “детектированных” потоков символов. Каждый детектированный поток символов включает в себя символы, которые являются оценками символов модуляции, переданы для соответствующего потока данных. Затем процессор 260 данных RX демодулирует, отменяет перемежение и декодирует каждый детектированный поток символов, чтобы восстановить данные для потока данных. Затем данные предоставляют в приемник 264 данных. Обработка с помощью процессора 260 данных RX является дополняющей к обработке, выполненной с помощью процессора 220 TX и процессора 214 данных MIMO ТХ в базовой станции 102.
Оценка характеристики канала, сгенерированная с помощью процессора 260 RX, может быть использована, чтобы выполнять пространственную, пространственную/временную обработку в приемнике, регулировать уровни мощности, изменять скорости или схемы модуляции или другие действия. Процессор 260 RX дополнительно может оценивать отношения сигнала к шуму и помехе (SNR) детектированных потоков символов и, возможно, другие характеристики канала, и предоставляет эти количественные величины в процессор 270. Процессор 260 данных RX или процессор 270 дополнительно могут получать оценку “рабочего” SNR для системы. Затем процессор 270 предоставляет информацию о состоянии канала (CSI), которая может содержать различные типы информации относительно линии связи и/или принятого потока данных. Например, CSI может содержать только рабочее SNR. В другом варианте осуществления CSI может содержать указатель качества канала (CQI), который может быть численной величиной, указывающей одно или более состояний канала. Затем CSI обрабатывают с помощью процессора 278 данных ТХ, пространственно обрабатывают с помощью процессора 280 MIMO ТХ, приводят в надлежащее состояние с помощью передатчиков 254а по 254r и передают обратно в базовую станцию 102.
В базовой станции 102 модулированные сигналы из подвижного устройства 108 принимают с помощью системы 224 антенн, приводят в надлежащее состояние с помощью RCVR 222 и обрабатывают с помощью процессора 242 данных RX, чтобы восстановить CSI, сообщенную с помощью подвижного устройства 108. Затем сообщенную CSI предоставляют в процессор 230 и используют, чтобы (1) определять скорости передачи данных и схемы кодирования и модуляции, используемые для потоков данных, и (2) генерировать различные управляющие сигналы для процессора 214 данных ТХ и процессора 220 ТХ. В качестве альтернативы CSI может быть использована с помощью процессор 270, чтобы определять схемы модуляции и/или скорости кодирования для передачи вместе с другой информацией. Затем это может быть предоставлено в базовую станцию 102, которая использует эту информацию, которая может быть квантована, чтобы предоставить позже передачи в подвижное устройство 108. Процессоры 230 и 270 руководят работой в базовой станции 102 и подвижном устройстве 108. Памяти 232 и 272 предоставляют хранение для программных кодов и данных, используемых с помощью процессоров 230 и 270, соответственно.
Несмотря на то что фиг.2 иллюстрирует систему антенн MIMO, различные концепции, описанные в связи с системой антенн MIMO, могут быть применены к системе антенн MISO, в которой множество антенн ТХ, например, антенны в базовой станции, передают один или более потоков символов в устройство с одно антенной, например, подвижное устройство. Также система антенн SISO может быть использована таким же способом, как описано относительно фиг.2. В случае системы антенн SISO поток данных из процессора 214 данных ТХ может быть предоставлен непосредственно в TMTR/RCVR 222 для передачи через систему антенн. Однако, как будет более подробно описано позже, процессор 220 MIMO TX может быть использован в системе антенн SISO, чтобы предоставлять множество пространственных потоков из множества систем антенн, чтобы увеличивать производительность подвижных устройств на краю соты.
В описании нескольких аспектов базовой станции различные функции описаны в понятиях системы 213 обработки. Система 213 обработки может быть осуществлена как аппаратное обеспечение, программное обеспечение или комбинация первого и второго. Осуществлена ли как аппаратное обеспечение или программное обеспечение, будет зависть от конкретного приложения и ограничений конструирования, наложенных на всю систему. Опытные изобретатели могут осуществить описанные функциональные возможности различными путями для каждого конкретного приложения.
В качестве примера и без ограничений система 213 обработки, используемая с помощью базовой станции 102, может быть осуществлена с помощью одного или более процессоров. Примеры процессоров включают в себя микропроцессоры, микроконтроллеры, процессоры цифровых сигналов (DSP), вентильные матрицы, программируемые в условиях эксплуатации (FPGA), программируемые логические устройства (PLD), контроллеры, конечные автоматы, вентильные логические устройства, дискретные компоненты программного обеспечения или любые другие схемы обработки, которые могут выполнять различные функциональные возможности, описанные во всем этом раскрытии.
Процессор может быть сконфигурирован для исполнения программного обеспечения. Примером процессора, который может исполнять программное обеспечение, является микропроцессор, который может осуществлять доступ к программному обеспечению на машиночитаемом носителе. Микропроцессор может быть интегральной схемой, соединенной вместе с машиночитаемым носителем, и другими схемами через шину или другое средство связи. В качестве альтернативы микропроцессор может быть частью встроенной системы, осуществленной с помощью интегральной схемы прикладной ориентации (ASIC). Встроенный микропроцессор может быть процессором ARM (усовершенствованной машины RISC) с машиночитаемым носителем и другими схемами, интегрированным в одну микросхему.
Программное обеспечение будет истолковано в широком смысле, чтобы означать инструкции, данные или любую их комбинацию, будь то упомянуто как программное обеспечение, программно-аппаратное обеспечение, программное обеспечение промежуточного слоя, микрокод, язык описания аппаратного обеспечения, или иначе. Машиночитаемый носитель может включать в себя в качестве примера RAM (оперативную память), флэш-память, ROM (постоянную память), PROM (программируемую постоянную память), EPROM (стираемую программируемую постоянную память), EEPROM (электрически стираемую программируемую постоянную память), регистры, магнитные диски, оптические диски, жесткие диски или любые другие подходящие носители памяти, или любую их комбинацию.
Машиночитаемый носитель может быть частью системы обработки. В качестве альтернативы любая часть машиночитаемого носителя может быть внешней к системе обработки. В качестве примера машиночитаемый носитель может включать в себя линию передачи, сигнал канала связи, модулированный с помощью данных, и/или компьютерный продукт, отдельный от базовой станции или подвижной станции, доступ ко всем из которых может быть осуществлен с помощью системы процессора посредством приемопередатчика или с помощью другого средства.
Программное обеспечение, поддерживаемое с помощью машиночитаемого носителя, может находиться в одном устройстве памяти или может быть распределено по множеству устройств памяти. В качестве примера программное обеспечение может быть загружено в RAM с жесткого диска. Во время исполнения программного обеспечения процессор может загружать некоторые из инструкций в кэш-память, чтобы увеличить скорость доступа. Одна или более строк кэш-памяти затем могут быть загружены в главный файл регистра для исполнения с помощью процессора. При ссылке на функциональные возможности программного обеспечения следует понимать, что такие функциональные возможности осуществляют с помощью процессора при исполнении инструкций программного обеспечения.
Различные концепции теперь будут представлены со ссылкой на специфическую структуру данных передачи. Как без труда поймут специалисты в данной области техники, эти концепции могут быть распространены на другие структуры данных передачи. Структура данных в этом примере основана на передаче нисходящей линии связи OFDM. OFDM является методикой расширенного спектра, которая распределяет данные через большое число поднесущих, разделенных промежутками на точных частотах. Разделение предоставляет “ортогональность”, которая дает возможность приемнику восстанавливать данные из поднесущих.
Пример структуры данных для передачи нисходящей линии связи изображен на фиг.3, причем горизонтальные измерения представляют время, а вертикальные измерения представляют частоты. Передача нисходящей линии связи разделена на блоки, упомянутые как кадры 302, но также могут быть упомянуты специалистами в данной области техники как пакет, слот, блок или другая номенклатура, которая представляет структуру данных для передачи через беспроводную среду. Кадр 302 дополнительно разделен на 5 подкадров 304, причем каждый подкадр имеет 2 слота 306. Каждый слот 306 включает в себя 6 блоков 308 ресурсов (RB), а каждый блок 308 ресурсов составлен из 84 элементов 310 ресурсов, содержащих 7 символов OFDM х 12 поднесущих OFDM. Один элемент ресурсов переносит модулированные биты QPSK, 16QAM или 64QAM. В качестве примера с 16QAM каждый элемент ресурсов переносит 4 бита. Число блоков ресурсов, назначенных каждой подвижной станции 108 с помощью базовой станции 102, основано на требованиях качества обслуживания (QoS) приложений, запущенных в подвижных устройствах 108. Чем выше требование QoS для любого данного подвижного устройства, тем больше блоков ресурсов, которые необходимо назначить с помощью базовой станции подвижному устройству.
В одном варианте осуществления базовой станции 102 общий опорный сигнал (CRS) передают через все соты, обслуживаемые с помощью этой базовой станции 102. В этом примере CRS передают в первом, втором и пятом символах OFDM в слоте. Базовая станция 102 может использовать ортогональную последовательность частотной области, сдвинутую во времени, для каждого опорного сигнала, чтобы дать возможность подвижной станции различать их. В качестве примера первый CRSi передают на поднесущих 0 и 6 в первом символе OFDM и на поднесущих 3 и 9 в четвертом символе OFDM. Второй CRSj передают на поднесущих 3 и 9 в первом символе OFDM и на поднесущих 0 и 6 в четвертом символе OFDM одного и того же слота. Конкретная ортогональная последовательность частотной области, сдвинутая во времени, для данной соты основана на идентификаторе (ID) соты, назначенном оператором сети (не изображен) или некоторым другим объектом. Данные и управляющая информация могут быть переданы в подвижную станцию в соте в элементах ресурсов, не занятых с помощью CRS для этой соты. В качестве примера базовая станция 102 может передать данные и управляющую информацию в подвижную станцию 104i в соте 104i на поднесущих 1-5 и 7-11 в первом символе OFDM и на поднесущих 0-2, 4-8 и 10-11 в четвертом символе OFDM. Базовая станция 102 также может передать данные и управляющую информацию в подвижную станцию 104i на всех поднесущих во втором, третьем, пятом, шестом и седьмом символах OFDM в блоке ресурсов.
Обратимся к фиг.4, подвижное устройство 108i переместилось к краю соты 104i. В результате подвижное устройство 108i может начать испытывать помехи от передач базовой станции в соседней соте 104j. Чтобы избежать этой проблемы, базовая станции 102 может осуществить различные методики, чтобы координировать передачи между сотами 104, чтобы улучшить производительность, испытываемую подвижными устройствами на краях соты. Более конкретно, базовая станция 102 может координировать передачи в подвижные устройства в разных сотах и использовать пространственные измерения, чтобы (1) увеличить производительность подвижных устройств на краю соты с помощью либо посылки большего числа пространственных лучей, либо предоставления большего усиления мощности формирования диаграммы направленности, и/или (2) минимизировать помехи, испытываемые подвижными устройствами на краю соты.
Теперь будут представлены различные примеры со ссылкой на подвижное устройство 108i, работающее в распределенном режиме MIMO на краю соты 104i. В этом примере требуется оценка канала h ij из антенны 106j для необслуживающей соты 104j в подвижное устройство 108i. Эта оценка канала h ij вместе с оценкой канала h ii из антенны 106i для обслуживающей соты 104i в подвижное устройство 108i может быть вычислена с помощью процессор 260 данных RX (фиг.2) в подвижном устройстве 108i и предоставлена в базовую станцию 102 в CSI или с помощью другого средства. Базовая станция 102 может координировать передачи между сотами 104, чтобы периодически позволять подвижной станции 108i иметь чистый (хорошего качества) взгляд на опорный сигнал, переданный из антенны 106j для необслуживающей или создающей помехи соты 104j. Чтобы выполнить это, в базовой станции могут быть осуществлены различные методики.
В одном осуществлении ID сот для сот 104 назначают с помощью оператора сети (не изображен) или другого объекта, чтобы обеспечить, что опорные сигналы, переданные в каждой соте, расположены в шахматном порядке относительно частоты без перекрытия. Это будет обеспечивать, что опорные сигналы, переданные с помощью базовой станции 102 в трех сотах 104, не противоречат. Затем базовая станция может предпринять шаги, чтобы обеспечить, что данные, переданные с помощью базовой станции 102 в одной соте 106, не будут противоречить с опорным сигналом, переданным с помощью базовой станции в соседнюю соту. В качестве примера без какого-либо действия с помощью базовой станции 102 данные, переданные с помощью базовой станции 102 в подвижное устройство 108i в соте 104i, могут противоречить с опорным сигналом, переданным с помощью базовой станции 102, в соседней соте 104j. Чтобы избежать этого, базовая станция 102 может выкалывать данные, переданные в подвижное устройство 108i через поднесущие OFDM, занятые с помощью опорного сигнала, переданного в соседнюю соту 104i с помощью базовой станции 102. Операция выкалывания может быть выполнена в ответ на обратную связь из подвижной станции 104i, указывающей, что она испытывает помехи от соседней соты 104j. Обратная связь может быть предоставлена в CSI или с помощью некоторого другого средства. Операция выкалывания должна быть выполнена в цикле малой нагрузки (например, один раз каждые х подкадров), чтобы избежать отрицательного влияния на QoS подвижного устройства 108i. Предпочтительно выкалывают только данные, а не управляющую информацию. Операция выкалывания может быть выполнена с помощью процессора 214 данных ТХ базовой станции в ответ на информацию управляющего сигнала из процессора 230.
Обратимся к фиг.5, подвижное устройство 108k теперь переместилось к краю соты 104k. В результате подвижное устройство 108k также может начать испытывать помехи от передач базовой станции в соседнюю соту 104j. Как описано ранее в связи с подвижным устройством 108i, подвижное устройство 108k должно оценить канал h jk из антенны 106j для не обслуживающей соты 104j в подвижное устройство 108k и оценить канал h kk из антенны 106k для обслуживающей соты 104k в подвижное устройство 108k и предоставить эту информацию в базовую станцию 102 через CSI или с помощью другого средства. В этой ситуации базовая станция 102 может выкалывать данные, переданные в оба подвижных устройства 108i и 108k через поднесущие OFDM, занятые с помощью опорного сигнала, переданного в соседнюю соту 104i с помощью базовой станции 102. Предпочтительно базовая станция 102 выполняет операцию выкалывания в виде TDM (т.е. через разные подкадры), чтобы избежать видимой потери скорости передачи через один блок ресурсов.
В альтернативном варианте осуществления базовой станции 102 ID сот для сот назначают с помощью оператора сети (не изображен) или другого объекта, чтобы обеспечивать, что опорные сигналы, переданные в каждой соте, всегда противоречат. Это будет обеспечивать, что опорный сигнал, переданный с помощью базовой станции 102 в три соты 104, не противоречит с данными, переданными в соседнюю соту 104. Обратимся к фиг.4, базовая станция 102 может выкалывать опорный сигнал, переданный в подвижное устройство 108i через поднесущие OFDM, занятые с помощью опорного сигнала, переданного в соседнюю соту 104i с помощью базовой станции 102. Операция выкалывания может быть выполнена в ответ на обратную связь из подвижной станции 104i, указывающей, что она испытывает помехи от соседней соты 104j. Обратная связь может быть предоставлена в CSI или с помощью некоторого другого средства. Операция выкалывания должна быть выполнена в цикле малой нагрузки (например, один раз каждые х подкадров), чтобы избежать отрицательного влияния на QoS подвижного устройства 108i. Предпочтительно выкалывают только опорный сигнал, а не управляющую информацию. Операция выкалывания может быть выполнена с помощью процессора 214 данных ТХ базовой станции в ответ на информацию управляющего сигнала из процессора 230.
Обратимся к фиг.5, базовая станция 102 может выкалывать опорный сигнал, переданный в оба подвижных устройства 108i и 108k через поднесущие OFDM, занятые с помощью опорного сигнала, переданного в соседнюю соту 104i с помощью базовой станции 102. Предпочтительно базовая станция 102 выполняет операцию выкалывания в виде TDM (т.е. через разные подкадры), чтобы избежать видимой потери скорости через один блок ресурсов.
Подход выкалывания опорного сигнала отличается от подхода выкалывания данных тем, что выкалывание опорного сигнала не подвергается потере скорости передачи в каналах данных. Однако, когда опорные сигналы выколоты, может быть затронута производительность демодуляции опорного сигнала. Влияние может быть минимизировано с помощью временной фильтрации и операции выкалывания в цикле малой нагрузки.
Как описано ранее, каждая антенна 106, изображенная на фиг.2, представляет направленную антенну. В случае, когда имеются две антенны ТХ на соту, базовая станция 102 может выполнять операцию выкалывания на основе каждой антенны ТХ. Предпочтительно базовая станция 102 выполняет операцию выкалывания, связанную с каждой антенной, в виде TDM (т.е. через разные подкадры), чтобы избежать видимой потери скорости передачи через один блок ресурсов.
В случае, когда имеются четыре антенны ТХ на соту, базовая станция 102 также может выполнять операцию выкалывания на основе каждой антенны ТХ. Базовая станция 102 выполняет операцию выкалывания для пары антенн в одном подкадре. В качестве примера антенна 106j базовой станции может содержать четыре антенны 106j1, 106j2, 106j3 и 106j4. Базовая станция 102 может выполнять операцию выкалывания для обеих антенн 106j1 и 106j3 в течение одного и того же подкадра и выполнять операцию выкалывания для обеих антенн 106j2 и 106j4 в течение одного и того же подкадра. Предпочтительно базовая станция 102 выполняет операцию выкалывания, связанную с каждой пар антенн, в виде TDM (т.е. через разные подкадры), чтобы избежать видимой потери скорости передачи через один блок ресурсов.
Согласно операции процедурой выкалывания управляют с помощью базовой станции 102 и, следовательно, он является прозрачной для подвижных устройств 108. В результате унаследованные подвижные устройства, которые не распознают операцию выкалывания, могут оставаться примененными в беспроводной системе связи, таким образом увеличивая свой полезный срок службы. Новые подвижные устройства, которые сконструированы для использования преимуществ различных признаков, представленных во всем этом раскрытии, могут опознавать эти операции выкалывания, таким образом, они могут улучшить производительность данных. В качестве примера в подвижном устройстве 108, использующем турбодекодирование в процессоре 260 данных RX (смотри фиг.2), LLR на поднесущих, являющихся выколотыми, могут быть обнулены. Операция выкалывания может быть медленной динамической во времени и может быть активирована/деактивирована по необходимости на основе от соты к соте.
Несколько изменений в этот подход будут без труда понятны специалистам в данной области техники из уроков, приведенных в настоящей заявке. В качестве примера вместо выкалывания данных или опорных сигналов полностью базовая станция 102 может просто передавать данные или опорные сигналы со значительно более низким уровнем мощности в соответствующих элементах ресурсов.
Независимо от методики, использованной с помощью подвижного устройства на краю соты, чтобы оценивать канал из соседней соты 104, базовая станция 102 может использовать эту информацию, чтобы увеличивать производительность подвижного устройства на краю соты с помощью либо посылки большего числа пространственных лучей, либо предоставления большего усиления мощности формирования диаграммы направленности. Теперь будут представлены различные методики для выполнения этого, во-первых, для базовой станции 102, имеющей одну антенну ТХ на соту, а затем для базовой станции 102, имеющей множество антенн ТХ на соту.
Обратимся к фиг.4, подвижное устройство 108i изображено на краю соты 104i. В этом случае подвижное устройство 108i либо испытывает помехи от соты 104j, пропорциональные  , либо никаких помех от соты 104j (никакое подвижное устройство не запланировано в одних и тех же блоках частотно-временных ресурсов в соте 104j, как подвижное устройство 108i). В этом случае передача из базовой станции 102 в подвижное устройство 108i ограничена одним потоком.
, либо никаких помех от соты 104j (никакое подвижное устройство не запланировано в одних и тех же блоках частотно-временных ресурсов в соте 104j, как подвижное устройство 108i). В этом случае передача из базовой станции 102 в подвижное устройство 108i ограничена одним потоком.
Однако, когда нет помех от соты 104j, базовая станция 102 может использовать линию связи h
ji, чтобы помочь передаче в подвижное устройство 108i. Чтобы выполнить это, базовая станция 102 обрабатывает скалярные каналы из антенны 106 каждой соты 104 как компоненты виртуального векторного канала. Следовательно, для подвижного устройства 108i
 . Концептуально базовая станция 102 преобразовала две соты, где каждая сота имеет одну антенну 106 ТХ, в виртуальную соту с двумя антеннами ТХ. В действительности, базовая станция 102 переводит схему передачи в подвижное устройство 108i в однопользовательскую схему MISO, в которой передача с помощью базовой станции в подвижное устройство 108i может быть послана из обеих антенн ТХ 106i и 106j.
. Концептуально базовая станция 102 преобразовала две соты, где каждая сота имеет одну антенну 106 ТХ, в виртуальную соту с двумя антеннами ТХ. В действительности, базовая станция 102 переводит схему передачи в подвижное устройство 108i в однопользовательскую схему MISO, в которой передача с помощью базовой станции в подвижное устройство 108i может быть послана из обеих антенн ТХ 106i и 106j.
Следует заметить, что для этой схемы, поскольку подвижное устройство 108i имеет только одну антенну RX, оно становится обслуживаемым только одним потоком. Одной возможной схемой, чтобы увеличить производительность передачи, является формирование диаграммы направленности с помощью соответствия каналу h i в базовой станции 102.
В случае, когда подвижное устройство 108i имеет множество антенн RX, базовая станция 102 может использовать дополнительные измерения, чтобы передавать больше потоков в подвижное устройство 108i. Опять этот случай, когда никакие подвижные устройства в соте 104j не запланированы в одних и тех же блоках частотно-временных ресурсов, как подвижное устройство 108i. В действительности базовая станция переводит схему передачи в подвижное устройство 108i в однопользовательскую схему MIMO, в которой передача с помощью базовой станции в подвижное устройство 108i может быть послана из обеих антенн ТХ 106i и 106j.
Слабо координированная схема может быть осуществлена, когда подвижное устройство 108i передает по обратной связи CQI для соты 104i и соты 104j соответственно. Переданные по обратной связи CQI для каждой соты могут зависеть от приемника, например, на основе линейной MMSE, MMSE\SIC или MLD и т.д. На основании CQI, переданного по обратной связи из подвижного устройства 108i, базовая станция 102 будет передавать в подвижное устройство 108i один поток через антенну 106i, а другой поток через антенну 106j с соответствующим выбором MSC. Следовательно, как это кажется подвижному устройству 108i, это кажется эквивалентной однопользовательской схемой MIMO, в которой подвижное устройство 108i обслуживают два пространственных потока, один из соты 106i, а другой из соты 106j. Подвижное устройство 108i может применить, в качестве примера, приемник линейной MMSE, чтобы разделить два потока, или усовершенствованную версию MMSE/SIC и т.д. Преимуществом этой схемы является то, что в отличие от планирования имеется мало координации между двумя сотами (с точки зрения выбора диаграммы направленности или скорости передачи). Следовательно, это является легким переходом из унаследованной системы.
Строго координированная схема может быть осуществлена, когда подвижное устройство 108i совместно обрабатывает матрицы каналов из соты 104i и соту 106j. Переданные по обратной связи CQI определяют как CQI на уровень, где каждый поток данных посылают только из одной антенны 106, эта схема является более общей. В предварительно не закодированном сценарии эта схема может стать слабо координированной схемой, обсужденной выше, или может добавить перестановку антенн, чтобы увеличить пространственную симметрию между разными потоками. В предварительно закодированном сценарии каждый поток предварительно умножают на вектор предварительного кодирования, охватывающий все антенны ТХ по всей соте 104i и соте 104j. Затем предварительно закодированные потоки суммируют по всем антеннам до передачи. Эта схема может быть обобщена до 3 или более сот специалистами в данной области техники.
Затем различные концепции теперь будут представлены для базовой станции 102, имеющей множество антенн ТХ на соту. Эти концепции будут представлены со ссылкой на фиг.6. Фиг.6 является концептуальной схемой беспроводной системы связи множественного доступа, аналогичной системе, изображенной на фиг.4, за исключением того, что базовая станция использует две антенны 106i1 и 106i2 ТХ, чтобы обслуживать соту 104i, две антенны 106j1 и 106j2 ТХ, чтобы обслуживать соту 104j, и две антенны 106k1 и 106k2, чтобы обслуживать соту 104k. В этом примере подвижное устройство 108i находится на краю соты 104i. Когда нет помех от соты 104j, базовая станция может использовать линию связи h ji, чтобы помочь передаче в подвижное устройство 108i. Чтобы выполнить это, базовая станция совместно обрабатывает матрицы каналов из соты 104i и соты 104j. Обычно в этом случае полное число антенн ТХ будет больше, чем число антенн RX. Следовательно, матрицы предварительного кодирования должны быть выбраны в подвижном устройстве 108i и переданы по обратной связи в базовую станцию 102, чтобы повысить усиление мощности формирования диаграммы направленности. С другой стороны, если действительное измерение увеличивается (минимум числа антенн ТХ и RX), также больше потоков может быть передано в подвижное устройство 104i.
Концептуальная схема распределенной системы антенн изображена на фиг.7. В этом примере изображена базовая станция 102, поддерживающая две антенны 106i1 и 106i2 ТХ, чтобы обслуживать соту 104i, две антенны 106j1 и 106j2 ТХ, чтобы обслуживать соту 104j, и две антенны 106k1 и 106k2, чтобы обслуживать соту 104k. Распределенная система антенн, изображенная на фиг.7, является просто специальным случаем беспроводной системы связи, представленной ранее в этом раскрытии, и различные концепции, описанные во всем этом раскрытии, могут быть распространены на эту систему.
Различные концепции теперь будут представлены для базовой станции 102, чтобы использовать пространственные измерения, чтобы минимизировать помехи, вызванные в подвижные устройства 108 на краю соты. Эти концепции сначала будут представлены для базовой станции 102, имеющей одну антенну ТХ на соту, а затем для базовой станции 102, имеющей множество антенн ТХ на соту. Фиг.8 является концептуальной схемой беспроводной системы связи множественного доступа, имеющей базовую станцию 102 с одной антенной ТХ на соту. В этом примере подвижное устройство 108i изображено на краю соты 104i, а подвижное устройство 108j изображено на краю соты 104j. Без координации между сотами в базовой станции 102 передача каждому пользователю подвижного устройства 108 является передачей с одним входом и одним выходом (SISO) или с одним входом и множеством выходов (SIMO). В этом случае подвижное устройство 108i испытывает помехи от соты 104j, пропорциональные  , а подвижное устройство 108j испытывает помехи от соты 104j, пропорциональные
, а подвижное устройство 108j испытывает помехи от соты 104j, пропорциональные  .
.
В этом примере базовая станция 102 обрабатывает скалярные каналы из антенны 106 базовой станции для каждой соты как компоненты виртуального векторного канала. Следовательно, для подвижных устройств 108i и 108j
 и
и  соответственно. Концептуально базовая станция 102 преобразовала две соты 104i и 104j, где каждая сота 104 имеет одну антенну передачи ТХ, в виртуальную соту с двумя антеннами ТХ. В действительности базовая станция 102 перевела схему передачи в два подвижных устройства 108i и 108j в многопользовательскую схему MIMO, в которой каждая из передач подвижных устройств может быть послана из обеих антенн 106i и 106j ТХ. Следует заметить, что для этой схемы базовая станция 102 передает только один поток в каждое подвижное устройство. В этой схеме оценки каналов, hi и hj, передают по обратной связи из подвижных устройств 108i и 108j для систем FDD и оцененные из канала восходящей линии связи с использованием взаимности для систем TDD.
соответственно. Концептуально базовая станция 102 преобразовала две соты 104i и 104j, где каждая сота 104 имеет одну антенну передачи ТХ, в виртуальную соту с двумя антеннами ТХ. В действительности базовая станция 102 перевела схему передачи в два подвижных устройства 108i и 108j в многопользовательскую схему MIMO, в которой каждая из передач подвижных устройств может быть послана из обеих антенн 106i и 106j ТХ. Следует заметить, что для этой схемы базовая станция 102 передает только один поток в каждое подвижное устройство. В этой схеме оценки каналов, hi и hj, передают по обратной связи из подвижных устройств 108i и 108j для систем FDD и оцененные из канала восходящей линии связи с использованием взаимности для систем TDD.
Оценки каналов, hi и hj, используют с помощью процессор 220 ТХ (смотри фиг.2) в базовой станции 102, чтобы предварительно кодировать потоки данных, чтобы генерировать пространственные потоки для передачи в подвижные станции 108i и 108j. Решение предварительного кодера принудительной подачи нуля (ZF) определяют следующим образом: при условии  матрицу предварительного кодирования задают как:
матрицу предварительного кодирования задают как:

где  - диагональная матрица, нормализующая мощность передачи. Следует заметить, что, если канал точно известен в базовой станции 102, подвижная станция 108i не будет испытывать помех от соты 104j.
- диагональная матрица, нормализующая мощность передачи. Следует заметить, что, если канал точно известен в базовой станции 102, подвижная станция 108i не будет испытывать помех от соты 104j.
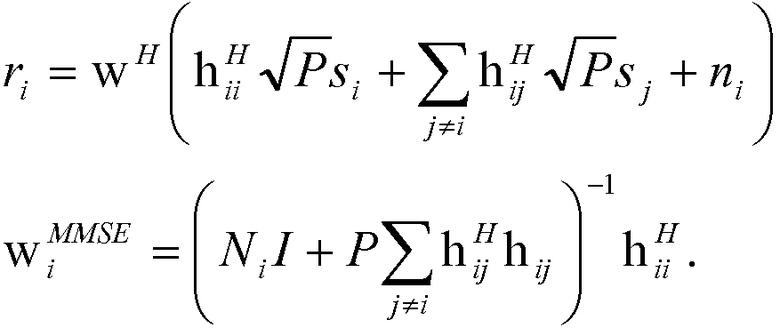
Предварительный кодер MMSE может быть использован, чтобы максимизировать отношение сигнала к вызванным помехам для подвижного устройства 104i:
решение является эквивалентным приемнику MMSE для соответствующей виртуальной восходящей линии связи, которое задают с помощью:
В беспроводных системах связи множественного доступа, в которых подвижные устройства имеют множество антенн RX, векторы hi и hj являются результирующим эквивалентным векторным каналом при допущении, что применяют определенную фильтрацию приема. Одним возможным фильтром приемника является доминирующий левый собственный вектор матрицы канала для соответствующего подвижного устройства.
В базовой станции 102 процессор 230 планирует передачи в подвижные устройства 108i и 108j. В этом примере базовая станция 102 предоставляет функцию планировщика независимо, чтобы выбирать подвижные устройства 104i и 104j. На стадии формирования диаграммы направленности/предварительного кодирования подвижные устройства 104i и 104j могут быть спарены для совместной передачи.
Другим осуществлением функции планирования является запуск совместного планировщика по двум сотам. Эта схема может максимизировать выигрыш производительности и минимизировать потери мощности из предварительного кодирования. Для схемы совместного планирования базовая станция 102 сначала может выбрать подвижное устройство 108 с самой высокой метрикой (на основании определенной равнодоступности, например, пропорционально равнодоступности) между обеими сотами 104. Если это подвижное устройство выбрано из одной соты 104 (например, соты 104i), тогда следующим этапом является выбрать совместимое подвижное устройство 108 из другой соты (например, соты 104j. Одним путем, чтобы выбирать следующее подвижное устройство 108, является следующий:
(1) идентифицировать подмножество всех подвижных устройств 108 из соты 104j, направленная информация канала (CDI) которой имеет малую корреляцию относительно CDI выбранного подвижного устройства из соты 104i. CDI, например, определяют как  для подвижного устройства 108i.
для подвижного устройства 108i.
(2) Из подмножества подвижных устройств из соты 104j выбрать подвижное устройство 108j с самой высокой метрикой, чтобы составить пару с подвижным устройством 108i из соты 104i.
Эта схема планирования сконфигурирована для выбора одного подвижного устройства 108 из каждой соты 104. Одно изменение должно устранить это ограничение, а также предоставить возможность обоим подвижным устройствам 108i и 108j быть выбранными из одной и той же соты 104, пока оба имеют высокие метрики равнодоступности и имеют малую корреляцию с точки зрения CDI.
Теперь будут представлены различные концепции для базовой станции 102, имеющей множество антенн ТХ на соту. Эти концепции будут представлены со ссылкой на фиг.9. Фиг.9 является концептуальной схемой беспроводной системы связи множественного доступа, аналогичной системе, изображенной на фиг.8, за исключением того, что базовая станция использует две антенны 106i1 и 106i2 ТХ, чтобы обслуживать соту 104i, две антенны 106j1 и 106j2 ТХ, чтобы обслуживать соту 104j, и две антенны 106k1 и 106k2, чтобы обслуживать соту 104k. В этом примере подвижное устройство 108i находится на краю соты 104i, а подвижное устройство 108j находится на краю соты 104j. Без координации между сотами передача в каждое подвижное устройство 108 является передачей с множеством входов и одним выходов (MISO) или с одним входом и множеством выходов (SIMO). В этом случае схема формирования диаграммы направленности или пространственного мультиплексирования из базовой станции 102 в соте 104 обычно пытается максимизировать производительность подвижного устройства 108 в его собственной соте 104. Однако различные методики могут быть осуществлены в базовой станции 102, чтобы бороться с возможными помехами, вызванными в подвижные устройства 108 в других сотах 104. Эти методики являются обобщенным вариантом подхода, описанного для одной антенны ТХ на соту, описанной ранее. Различие заключается в том, что канал из антенны 106 базовой станции в одной соте 104 в одно подвижное устройство 108 становится каналом MISO для подвижного устройства 108 с одной антенной RX и каналом MIMO для подвижного устройства 108 с множеством антенн RX.
Различные концепции сначала будут обсуждены в связи с подвижными устройствами, имеющими одну антенну RX. В этой конфигурации векторные каналы из антенн 106 базовой станции каждой соты 104 обрабатывают как компоненты виртуального векторного канала. Следовательно, для подвижных устройств 108i и 108j
 и
и  соответственно. В действительности схема передачи двух подвижных устройств 104i и 104j переведена в схему многопользовательской MIMO, в которой базовая станция 102 может передавать в каждое из подвижных устройств 104i и 104j из антенных решеток 106 ТХ для обеих сот 104. В случае одной антенны RX на подвижное устройство 108 схемы передачи могут быть теми же, что и схемы, описанные ранее для сценария одной антенны ТХ на соту, например предварительного кодера ZF или MMSE. Кроме того, базовая станция 102 может планировать более чем одно подвижное устройство 108 на соту 104, пока полное число подвижных устройств 108 меньше или равно полному числу антенн 106 ТХ по обеим сотам 104. Предварительные кодеры передачи, обсужденные выше (например, ZF или MMSE) по-прежнему применяются.
соответственно. В действительности схема передачи двух подвижных устройств 104i и 104j переведена в схему многопользовательской MIMO, в которой базовая станция 102 может передавать в каждое из подвижных устройств 104i и 104j из антенных решеток 106 ТХ для обеих сот 104. В случае одной антенны RX на подвижное устройство 108 схемы передачи могут быть теми же, что и схемы, описанные ранее для сценария одной антенны ТХ на соту, например предварительного кодера ZF или MMSE. Кроме того, базовая станция 102 может планировать более чем одно подвижное устройство 108 на соту 104, пока полное число подвижных устройств 108 меньше или равно полному числу антенн 106 ТХ по обеим сотам 104. Предварительные кодеры передачи, обсужденные выше (например, ZF или MMSE) по-прежнему применяются.
Затем будут обсуждены различные концепции в связи с подвижными устройствами, имеющими множество антенн RX. В случае множества антенн RX на подвижное устройство 108 опять векторы hi и hj являются результирующими эквивалентными векторными каналами при допущении, что применяют определенную фильтрацию приема. Одним возможным фильтром приемника является доминирующий левый собственный вектор матрицы канала для соответствующего подвижного устройства 108, где hi для подвижного устройства 108i и hj для подвижного устройства 108j являются масштабированными вариантами доминирующий правого собственного вектора. Кроме того, базовая станция 102 может планировать более одного потока на подвижное устройство 108. Например, если подвижное устройство 108i желает запросить М потоков, оно может сообщить M эквивалентных векторов каналов в базовую станцию 102, где m-й вектор канала является m-м доминирующим правым собственным вектором. Затем в базовой станции 102 предварительный кодер допускает каждый эквивалентный вектор канала как виртуальное подвижное устройство 108, а затем применяет те же схемы предварительного кодирования, обсужденные выше. Перестановка антенн может быть применена между потоками, обслуживаемым в одно подвижное устройство 108, чтобы достичь симметрии/баланса/надежности между потоками. Кроме того, базовая станция 102 может планировать более одного подвижного устройства 108 на соту 104, пока полное число обслуживаемых подвижных устройств 108 меньше или равно полному числу антенн 106 ТХ по обеим сотам 104. Предварительные кодеры передачи, обсужденные выше (например, ZF или MMSE) по-прежнему применяются.
Как обсужден ранее, процессор 230 (не изображен) в базовой станции 102 может быть сконфигурирован для выбора подвижных устройство 108 и выполнения функций планирования. Если допускают только один поток на подвижное устройство 108 и число планируемых подвижных устройств 108 равно числу сот 104, алгоритмы совместного планирования/выбора пользователя по существу являются теми же, что и алгоритмы, описанные ранее для подвижных устройств с одной антенной ТХ, где базовая станция 102 может либо (1) всегда выбирать одно подвижное устройство 108 на соту 104 с помощью запуска планировщика последовательно на основе от соты к соте, либо (2) обрабатывает все соты 104 как совместную соту с помощью запуска одного планировщика по всем подвижным устройствам 108 в разных сотах 104.
Если базовая станция имеет гибкость, чтобы обрабатывать больше подвижных устройств 108, чем число сот 104, и/или более одного потока на подвижное устройство 108, алгоритм планирования, обсужденный выше, может быть расширен с помощью обработки каждого сообщенного эквивалентного вектора канала как виртуального подвижного устройства, а затем применения алгоритма планирования относительно виртуальной области пользователя. Дополнительные ограничения могут быть наложены на алгоритм планирования, чтобы позволить (1), по меньшей мере, одному подвижному устройству 104 быть выбранным из каждой соты 104 и/или (2) позволить максимум Т потокам быть обслуженными на подвижное устройство 108 (например, Т=2). Опять полное число потоков, переданное через подвижные устройства 108, должно быть меньше или равно полному числу антенн передачи ТХ по обеим сотам 104. Вообще говоря, если подвижные устройства 108 являются достаточно разделенными географически, может быть лучше выбрать больше подвижных устройств 108 с одним потоком, чем выбрать меньше подвижных устройств 108 более чем с одним потоком каждое, поскольку может быть достигнут больший выигрыш разнесения множества пользователей, в то же время минимизируя потери мощности предварительного кодирования.
Из перспективы предварительного кодирования концепции, представленные в связи с фиг.9, обрабатывают все антенны 106 из обеих сот 104 как одну антенную решетку. Следовательно, схемы передачи по существу становятся многопользовательской системой MIMO с одной виртуальной сотой. В качестве альтернативы схема координации низкого уровня может быть использована, чтобы поддерживать формирование диаграммы направленности, распределенное локально в каждой соте 104. Эта схема будет иметь преимущества поддержания архитектуры унаследованной системы с минимальными изменениями. С другой стороны, концепции, представленные в связи с фиг.9, формируют антенную решетку с помощью большего числа антенн 106 ТХ, чтобы предоставить более эффективное формирование диаграммы направленности и большие степени свободы для пространственного подавления помех.
Различные концепции для схемы координации низкого уровня будут представлены для подвижного устройства 108 с одной антенной RX. В этом примере для подвижного устройства 108i
 и
и  поддерживают разделенными вместо формирования совместного канала. Сигнал для подвижного устройства 108i передают из соты 104i, т.е. испытывающей только векторный канал
поддерживают разделенными вместо формирования совместного канала. Сигнал для подвижного устройства 108i передают из соты 104i, т.е. испытывающей только векторный канал  . С другой стороны, подвижное устройство 108i по-прежнему будет испытывать помехи, поступающие от соты 104j через
. С другой стороны, подвижное устройство 108i по-прежнему будет испытывать помехи, поступающие от соты 104j через  , вследствие совместных помех каналов. Однако, поскольку обе соты 104i и 104j принадлежат одной и той же базовой станции 102, базовая станция 102 может принимать во внимание помехи, вызванные в подвижное устройство 108i, при выборе подвижного устройства 108j, чтобы обслуживать, и вектора формирования диаграммы направленности. Аналогично базовая станция 102 может принимать во внимание помехи, вызванные в подвижное устройство 108j, при выборе подвижного устройства 108i, чтобы обслуживать, и вектора формирования диаграммы направленности.
, вследствие совместных помех каналов. Однако, поскольку обе соты 104i и 104j принадлежат одной и той же базовой станции 102, базовая станция 102 может принимать во внимание помехи, вызванные в подвижное устройство 108i, при выборе подвижного устройства 108j, чтобы обслуживать, и вектора формирования диаграммы направленности. Аналогично базовая станция 102 может принимать во внимание помехи, вызванные в подвижное устройство 108j, при выборе подвижного устройства 108i, чтобы обслуживать, и вектора формирования диаграммы направленности.
Одной схемой является выбор вектора формирования диаграммы направленности/предварительного кодирования, чтобы максимизировать отношение сигнала к вызванным помехам, которое определено как:
Решение является эквивалентным фильтру приемника MMSE соответствующей виртуальной линии связи,
Если мощность шума является небольшой и может быть игнорирована, решение предварительного кодера ZF определяют следующим образом, при условии  вектор предварительного кодирования для подвижного устройства 104i задают как
вектор предварительного кодирования для подвижного устройства 104i задают как

где  - диагональная матрица, нормализующая мощность передачи.
- диагональная матрица, нормализующая мощность передачи.
Затем различные концепции для схемы координации низкого уровня теперь будут представлены для подвижных устройств 108 с множеством антенн RX. В этом примере, в котором имеется множество антенн RX на подвижное устройство 108, опять вектор  является результирующим эквивалентным векторным каналом при допущении, что применена определенная фильтрация приемника. Одним возможным фильтром приемника является доминирующий левый собственный вектор матрицы канала для соответствующего пользователя, где
является результирующим эквивалентным векторным каналом при допущении, что применена определенная фильтрация приемника. Одним возможным фильтром приемника является доминирующий левый собственный вектор матрицы канала для соответствующего пользователя, где  по существу является масштабированным вариантом доминирующего правого собственного вектора.
по существу является масштабированным вариантом доминирующего правого собственного вектора.
Следует заметить, что матрица канала, рассмотренная в настоящей заявке, является матрицей канала в подвижное устройство 108 из обслуживающей соты 104
H
ii. По существу  . Аналогично эквивалентный канал из не обслуживающей соты 104 получают в результате применения того же фильтра приемника с помощью
. Аналогично эквивалентный канал из не обслуживающей соты 104 получают в результате применения того же фильтра приемника с помощью  .
.
Кроме того, базовая станция 102 может передавать более одного потока на подвижное устройство 108 в соте 104. Для m-го потока эквивалентный вектор канала  должен быть передан по обратной связи, также как
должен быть передан по обратной связи, также как  . Аналогично могут быть определены предварительные кодеры ZF и MMSE. Например, для предварительного кодера ZF в соте 104, ели определить
. Аналогично могут быть определены предварительные кодеры ZF и MMSE. Например, для предварительного кодера ZF в соте 104, ели определить

тогда вектор предварительного кодирования для m-го потока подвижного устройства задают как

Число потоков, обслуживаемых на подвижное устройство 108, S, может равняться числу антенн RX. Тем не менее, S обычно должно быть выбрано таким образом, чтобы, по меньшей мере, одно измерение приемника (степень свободы) может быть доступным для подавления помех для остаточных помех между пользователями. Кроме того, базовая станция 102 может планировать более одного подвижного устройства 108 на соту, пока полное число подвижных устройств 108 меньше или равно полному числу антенн ТХ по обеим сотам. Предварительные кодеры передачи, обсужденные выше (например, ZF или MMSE) по-прежнему применяются.
Из перспективы планирования базовая станция 102 запускает планировщик для каждой соты 104 независимо, чтобы выбирать подвижное устройство 108. После того, как принято решение для каждой соты 104, его распространяют в планировщик для соседних сот 104. Затем каждый планировщик исследует подвижные устройства (или потоки), обслуживаемые с помощью соседних сот 104, и, если эти подвижные устройства 108 (или потоки) сообщают векторы каналов из текущей соты 104, тогда базовая станция 102 выполняет схемы формирования диаграммы направленности, обсужденные выше, чтобы минимизировать помехи, вызванные в эти подвижные устройства 108 (или потоки).
Аналогично планировщик может быть усовершенствован с помощью рассмотрения всех подвижных устройств 108 совместно по сотам 104. Базовая станция сначала может выбрать подвижное устройство 108 (или поток) с самой высокой метрикой (на основании определенной равнодоступности, например, пропорционально равнодоступности) между сотами 104. Одним путем, чтобы выбирать следующее подвижное устройство 108, является следующий:
(1) для всех остальных подвижных устройств 108 (потоков) идентифицировать подмножество подвижных устройств 108, CDI которых имеет малую корреляцию относительно CDI выбранного подвижного устройства 108 (потока);
(2) из этого подмножества подвижных устройств 108 (или потоков) выбрать подвижное устройство 108 (или поток) с самой высокой метрикой, чтобы составить пару с подвижным устройством 108 (или потоком);
(3) продолжать процесс до тех пор, пока не будут выбраны все подвижные устройства 108 (или потоки).
Эта процедура выбора пользователя может помочь минимизировать потери мощности из предварительного кодирования. Определенные ограничения могут быть наложены, чтобы ограничить только одно подвижное устройство 108 на соту, и/или максимум T потоков на пользователя подвижного устройства 108 (например, Т=2) и/или, чтобы позволить возможное выключение одной или более сот 104 в случае, когда имеются новые совместимые подвижные устройства 108, которые по существу являются адаптивными FFR.
В предыдущем подходе только координацию низкого уровня выполняют на уровне выбора подвижного устройства 108. Базовая станция 102, по-прежнему, принимает решение о векторе формирования диаграммы направленности/предварительного кодирования для каждой соты 104 отдельно. Одним более высоким уровнем координации является на основании тех же каналов обратной связи совместно выбирать векторы предварительного кодирования по сотам 104 в одном подвижном устройстве 108. Этот подход может быть осуществлен в кодовой книге предварительного кодирования конечного размера с разными критериями. В качестве примера максимизировать суммарную скорость передачи или среднее гармоническое скоростей передачи подвижных устройств, например,

Этот подход требует дополнительных обратных связей относительно мощности помех каждого пользователя.
В качестве альтернативы может быть использован гибридный подход. В качестве примера с двумя подвижными устройствами 108 подвижное устройство 108 высокой геометрии сначала выбирает вектор предварительного кодирования на основании решения ZF точного вида, а подвижное устройство 108 низкой геометрии выбирает вектор предварительного кодирования из конечной кодовой книги.
В вышеприведенных обсуждениях фильтры приемника (например, левые собственные векторы) применяют, чтобы получить эквивалентные векторы каналов для целей обратной связи. Кроме того, если базовая станция 102 имеет точную информацию о состоянии канала, данные на стороне подвижного устройства не будут испытывать помех между пользователями после применения описанных фильтров приемника. Однако вследствие погрешностей квантования, изменений канала и/или погрешностей оценки канала, в момент времени, когда подвижное устройство 108 принимает сигналы, канал, наблюдаемый с помощью подвижного устройства 108, мог бы отличаться от канала, допускаемого базовой станцией 102. Одним подходом, чтобы бороться с этой проблемой, является поддержка использования доминирующего левого собственного вектора. Подвижная станция 108 может применять фильтр MMSE, чтобы подавлять остаточные помехи вследствие рассогласований каналов. В частности, если один поток обслуживают на подвижное устройство 108, антенная решетка RX может использовать остальные N-1 антенн для целей подавления помех.
Концептуальная схема распределенной системы антенн изображена на фиг.10. В этом примере базовая станция 102 изображена, поддерживающей две антенны 106i1 и 106i2 ТХ, чтобы обслуживать соту 104i, две антенны 106j1 и 106j2 ТХ, чтобы обслуживать соту 104j и две антенны 106k1 и 106k2 ТХ, чтобы обслуживать соту 104k. Распределенная система антенн, изображенная на фиг.10, является просто специальным случаем беспроводной системы связи, представленной ранее в этом раскрытии, и различные концепции, описанные во всем этом раскрытии, могут быть распространены на эту систему.
Различные концепции, представленные во всем этом раскрытии, могут быть обобщены специалистами в данной области техники до трех и более сот.
В заключение, система 213 обработки является средством, с помощью которого зону покрытия для первой соты предоставляют посредством первой системы антенн, а зону покрытия для второй соты предоставляют посредством второй системы антенн. Система антенн может содержать одну направленную антенну, множество элементов антенн или устройства MIMO, MISO, SISO.
Система 213 обработки также является средством, с помощью которого данные обрабатывают для передачи в подвижное устройство в первой соте с использованием первой и второй систем антенн. Система 213 обработки использует оценку первого канала между первой системой антенн и подвижным устройством и оценку второго канала между второй системой антенн и подвижным устройством, чтобы обработать данные для передачи.
Система 213 обработки является средством, с помощью которого оценки первого и второго канала принимают из подвижного устройства. Система 213 обработки предоставляет средство для предоставления возможности подвижному устройству вычислять оценки из опорных сигналов, переданных как из первой системы антенн, так и из второй системы антенн. Это выполняют с помощью (1) генерации не противоречащих первого и второго опорных сигналов для передачи в первую и вторую соты, соответственно, и выкалывания данных для передачи в первую соту, чтобы дать возможность подвижному устройству генерировать оценку второго канала из второго опорного сигнала, или (2) генерации противоречащих первого и второго опорных сигналов для передачи в первую и вторую соты, соответственно, и выкалывания первого опорного сигнала, чтобы дать возможность подвижному устройству генерировать оценку второго канала из второго опорного сигнала.
Система обработки может координировать передачи в подвижное устройство в первой соте и использовать пространственные измерения, чтобы (1) увеличивать производительность подвижного устройства либо с помощью посылки большего числа пространственных лучей, либо предоставления большего усиления мощности формирования диаграммы направленности и/или (2) минимизировать помехи, испытываемые подвижными устройствами. В случае последнего система предоставляет средство для выбора второго подвижного устройства во второй соте для совместной передачи с подвижным устройством в первой соте, причем выбор второго подвижного устройства основан на уменьшении помех.
Фиг.11 является блок-схемой, иллюстрирующей пример функциональных возможностей устройства. Устройство 1100 включает в себя модуль 1102 для предоставления зоны покрытия для первой соты посредством первой системы антенн, модуль 1104 для предоставления зоны покрытия для второй соты посредством второй системы антенны, и модуль 1106 для обработки данных для передачи в подвижное устройство в первой соте с использованием первой и второй систем антенн.
Различные аспекты или признаки, описанные в настоящей заявке, могут быть осуществлены как способ, устройство или изделие производства с использованием стандартного программирования и/или методик конструирования. Подразумевают, что понятие “изделие производства”, использованное в настоящей заявке, охватывает компьютерную программу, доступную из любого компьютерно-читаемого устройства, носителя информации или носителей. Например, компьютерно-читаемые носители могут включать в себя магнитные запоминающие устройства (например, жесткий диск, гибкий диск, магнитные ленты и т.д.), оптические диски (например, компакт-диск (CD), цифровой универсальный диск (DVD) и т.д.), смарт-карты и устройства флэш-памяти (например, EPROM, карту, стержень, ключевой накопитель и т.д.), но не ограничены ими. Кроме того, различные запоминающие носители, описанные в настоящей заявке, могут представлять одно или более устройств и/или других машиночитаемых носителей для хранения информации. Понятие “машиночитаемый носитель” может включать в себя компьютерный программный продукт, имеющий код, доступный для выполнения с помощью компьютера, беспроводные каналы и различные другие носители, которые могут запоминать, содержать и/или переносить инструкцию (инструкции) и/или данные, без ограничения ими. Кроме того, компьютерный программный продукт может включать в себя компьютерно-читаемый носитель, имеющий одну или более инструкций или кодов, действующих с возможностью заставлять компьютер выполнять функции, описанные в настоящей заявке.
Кроме того, этапы и/или действия способа или алгоритма, описанного в связи с аспектами, раскрытыми в настоящей заявке, могут быть осуществлены непосредственно в аппаратном обеспечении, в модуле программного обеспечения, исполняемом с помощью процессора, или в комбинации первого и второго. Модуль программного обеспечения может находиться в памяти RAM, флэш-памяти, памяти ROM, памяти EPROM, памяти EEPROM, в регистрах, на жестком диске, на сменном диске, CD-ROM или любом другом виде носителя памяти, известном в данной области техники. Иллюстративный носитель памяти может быть соединен с процессором таким образом, что процессор может считывать информацию с носителя памяти и записывать информацию на носитель памяти. В качестве альтернативы носитель памяти может быть неотъемлемой частью процессора. Кроме того, в некоторых аспектах процессор и носитель памяти могут находиться в ASIC. Кроме того, ASIC может находиться в терминале пользователя. В качестве альтернативы процессор и носитель памяти могут находиться как дискретные компоненты в терминале пользователя. Кроме того, в некоторых аспектах этапы и/или действия способа или алгоритма могут находиться как одна или любая комбинация множества кодов и/или инструкций на машиночитаемом носителе, и/или компьютерно-читаемом носителе, который может быть заключен в компьютерный программный продукт.
Несмотря на то, что предыдущее раскрытие обсуждает иллюстративные аспекты и/или варианты осуществления, следует заметить, что различные изменения и модификации могли бы быть сделаны в настоящей заявке, не выходя за рамки объема описанных аспектов и/или вариантов осуществления, определенных с помощью прилагаемой формулы изобретения. Таким образом, подразумевают, что описанные аспекты включают в себя все такие изменения, модификации и варианты, которые находятся в рамках объема прилагаемой формулы изобретения. Кроме того, несмотря на то, что элементы описанных аспектов и/или вариантов осуществления могут быть описаны или заявлены в единственном числе, предполагают множественное число, если явно не указано ограничение единственным числом. Кроме того, весь или часть любого аспекта и/или варианта осуществления может быть использована со всем или частью любого другого аспекта и/или варианта осуществления, если не указано иначе. В том смысле, в каком понятие “включает”, использованное либо в подробном описании, либо в формуле изобретения, подразумевают как «включающий в себя», подобным образом понятие “содержит” интерпретируют как “содержащий”, когда используют в качестве переходного слова в формуле изобретения.
Различные иллюстративные логические схемы, логические блоки, модули и схемы, описанные в связи с вариантами осуществления, раскрытыми в настоящей заявке, могут быть осуществлены или выполнены с помощью процессора общего назначения, процессора цифровых сигналов (DSP), интегральной схемы прикладной ориентации (ASIC), вентильной матрицы, программируемой в условиях эксплуатации (FPGA) или другого программируемого логического устройства, дискретного вентиля или транзисторной логики, дискретных компонентов аппаратного обеспечения, или любой их комбинации, сконструированной для выполнения функций, описанных в настоящей заявке. Процессор общего назначения может быть микропроцессором, но в качестве альтернативы процессор может быть любым традиционным процессором, контроллером, микроконтроллером или конечным автоматом. Процессор также может быть осуществлен как комбинация вычислительных устройств, например, комбинация DSP и микропроцессора, множество микропроцессоров, один или более микропроцессоров в сочетании с ядром DSP или любая другая такая конфигурация. Кроме того, по меньшей мере, один процессор может содержать один или более модулей, действующих с возможностью выполнения одного или более этапов и/или действий, описанных выше.
Кроме того, этапы и/или действия способа или алгоритма, описанного в связи с аспектами, раскрытыми в настоящей заявке, могут быть осуществлены непосредственно в аппаратном обеспечении, в модуле программного обеспечении, исполняемом с помощью процессора, или в комбинации первого и второго. Модуль программного обеспечения может находиться в памяти RAM, флэш-памяти, памяти ROM, памяти EPROM, памяти EEPROM, в регистрах, на жестком диске, на сменном диске, CD-ROM или любом другом виде носителя памяти, известном в данной области техники. Примерный носитель памяти может быть соединен с процессором таким образом, что процессор может считывать информацию с носителя памяти и записывать информацию на носитель памяти. В качестве альтернативы носитель памяти может быть неотъемлемой частью процессора. Кроме того, в некоторых аспектах процессор и носитель памяти могут находиться в ASIC. Кроме того, ASIC может находиться в терминале пользователя. В качестве альтернативы процессор и носитель памяти могут находиться как дискретные компоненты в терминале пользователя. Кроме того, в некоторых аспектах этапы и/или действия способа или алгоритма могут находиться как одна или любая комбинация множества кодов и/или инструкций на машиночитаемом носителе и/или компьютерно-читаемом носителе, который может быть заключен в компьютерный программный продукт.
В одном или более аспектах описанные функции могут быть осуществлены в аппаратном обеспечении, программном обеспечении, программно-аппаратном обеспечении или любой их комбинации. Если осуществлены в программном обеспечении, функции могут быть сохранены как одна или более инструкций или код на компьютерно-читаемом носителе, или переданы посредством компьютерно-читаемого носителя. Компьютерно-читаемый носитель включает в себя, как носитель компьютерной памяти, так и носитель связи, включающий в себя любой носитель, который способствует передаче компьютерной программы из одного места в другое. Носитель памяти может быть любым доступным носителем, доступ к которому может быть осуществлен с помощью компьютера. В качестве примера, а не ограничения, такой компьютерно-читаемый носитель может содержать RAM, ROM, EEPROM, CD-ROM или другую память на оптическом диске, память на магнитном диске или другие устройства магнитной памяти, или любой другой носитель, который может быть использован, чтобы переносить или хранить желаемый программный код в виде инструкций или структур данных, и доступ к которому может быть осуществлен с помощью компьютера. Также любое соединение может быть названо компьютерно-читаемым носителем. Например, если программное обеспечение передают из web-сайта, сервера или другого удаленного источника с использованием коаксиального кабеля, волоконно-оптического кабеля, витой пары, цифровой абонентской линии (DSL) или беспроводных технологий, таких как инфракрасная, радио- и микроволновая, тогда коаксиальный кабель, волоконно-оптический кабель, витая пара, DSL или беспроводные технологии, такие как инфракрасная, радио- и микроволновая, включены в определение носителя. Все производные от понятие “диск”, использованные в настоящей заявке, включают в себя компакт-диск (CD), лазерный диск, оптический диск, цифровой универсальный диск (DVD), гибкий диск и диск blu-ray, где магнитные диски обычно воспроизводят данные магнитным способом, а оптические диски - оптическим способом с помощью лазера. Комбинации вышеперечисленного также должны быть включены в рамки объема понятия компьютерно-читаемого носителя.
Несмотря на то, что предыдущее раскрытие обсуждает иллюстративные аспекты и/или варианты осуществления, следует заметить, что различные изменения и модификации могли бы быть сделаны в настоящей заявке, не выходя за рамки объема описанных аспектов и/или вариантов осуществления, как определенных с помощью прилагаемой формулы изобретения. Кроме того, несмотря на то, что элементы описанных аспектов и/или вариантов осуществления могут быть описаны или заявлены в единственном числе, предполагают множественное число, если явно не указано ограничение единственным числом. Кроме того, весь или часть любого аспекта и/или варианта осуществления может быть использована со всем или частью любого другого аспекта и/или варианта осуществления, если не указано иначе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДАЧА СИМВОЛОВ ПИЛОТ-СИГНАЛА В СИСТЕМАХ БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2405256C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ФОНОВОГО СКАНИРОВАНИЯ В МОБИЛЬНЫХ СТАНЦИЯХ OFDMA | 2009 |
|
RU2474045C2 |
| ДИНАМИЧЕСКОЕ СНИЖЕНИЕ ВЫХОДНОЙ МОЩНОСТИ УСИЛИТЕЛЯ МОЩНОСТИ С ПОМОЩЬЮ ИНФОРМАЦИИ О ЗАПАСЕ МОЩНОСТИ | 2007 |
|
RU2421937C2 |
| Способ и устройство для позиционирования в системе беспроводной связи | 2023 |
|
RU2805220C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА СОТЫ В ОРТОГОНАЛЬНОЙ СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2011 |
|
RU2454797C1 |
| КАЛИБРОВКА АНТЕННОЙ РЕШЕТКИ ДЛЯ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2390942C2 |
| КАЛИБРОВКА АНТЕННОЙ РЕШЕТКИ ДЛЯ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2386223C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА СОТЫ В ОРТОГОНАЛЬНОЙ СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2420873C2 |
| УЛУЧШЕНИЕ СЛЫШИМОСТИ ДЛЯ ОПОРНЫХ СИГНАЛОВ | 2010 |
|
RU2494543C2 |
| УЛУЧШЕНИЕ СЛЫШИМОСТИ ДЛЯ ОПОРНЫХ СИГНАЛОВ | 2013 |
|
RU2544003C2 |
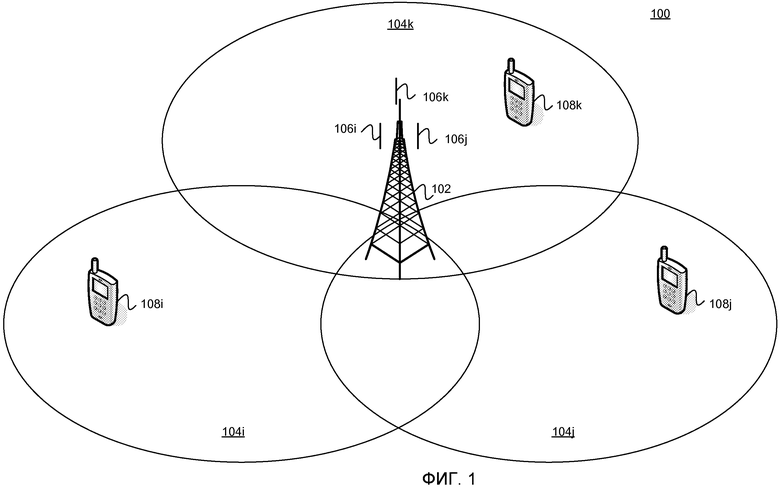
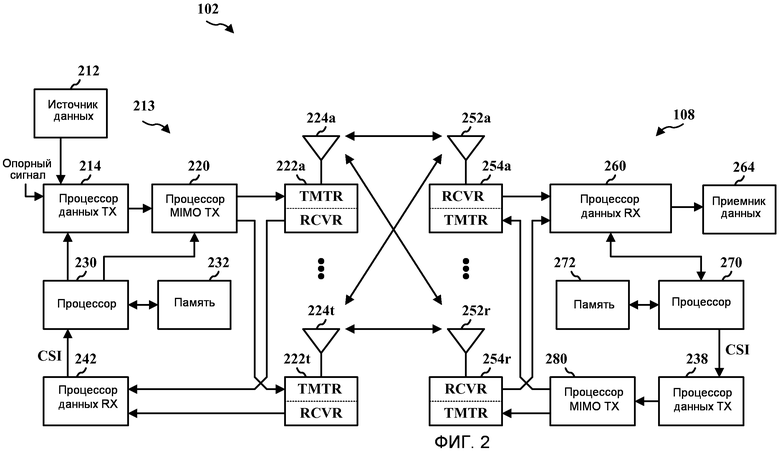

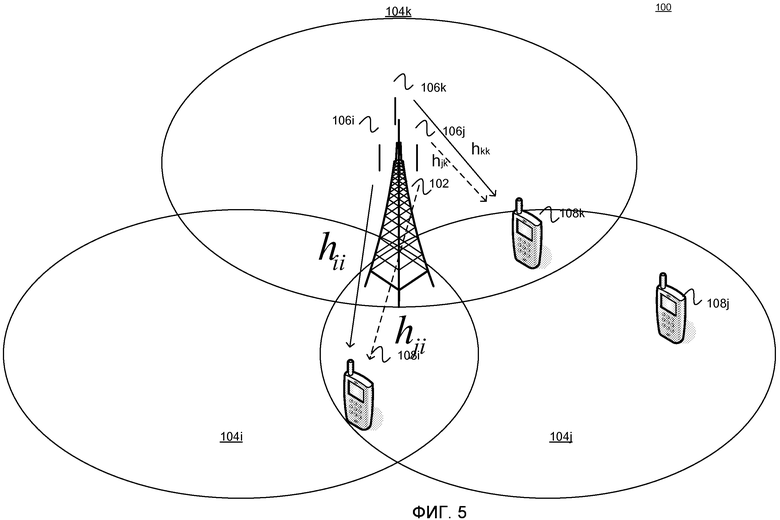

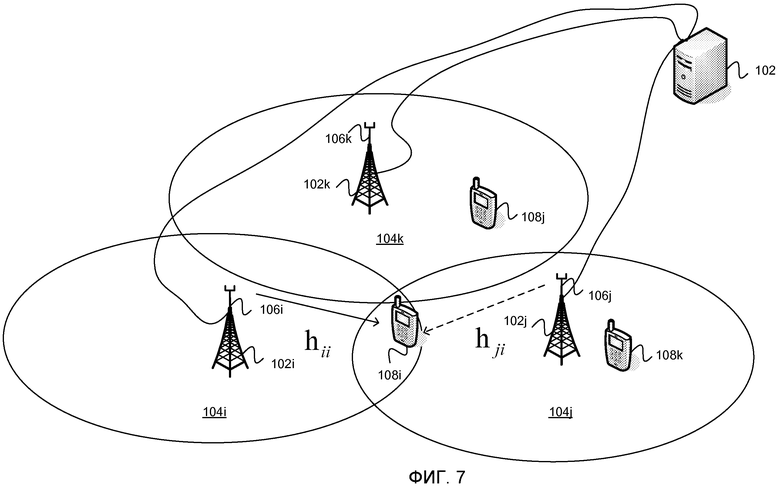
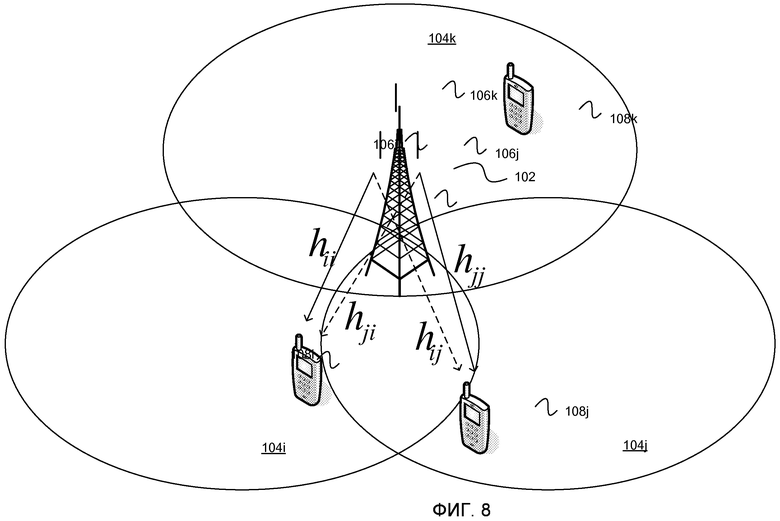
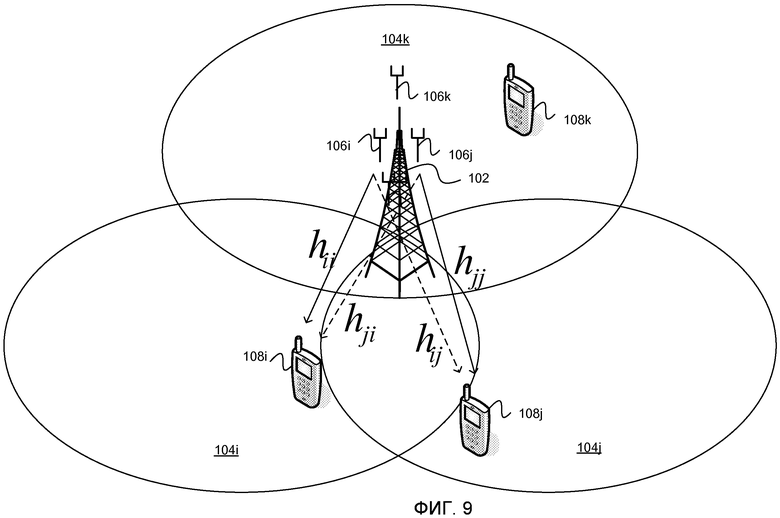

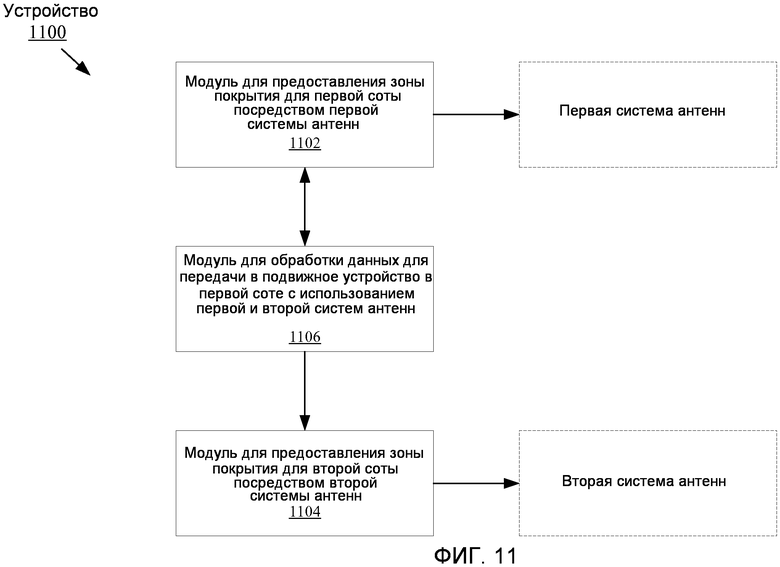
Изобретение относится к системам беспроводной связи, более конкретно, к системам и методам для обработки помех в беспроводной связи. Изобретение раскрывает системы и способы для предоставления зоны покрытия для первой соты (104i) посредством первой системы антенн (106i) и зоны покрытия для второй соты (104j) посредством второй системы антенн (106j). Данные также обрабатывают для передачи в подвижное устройство (108i) в первой соте с использованием первой и второй систем антенн. 4 н. и 32 з.п. ф-лы, 11 ил.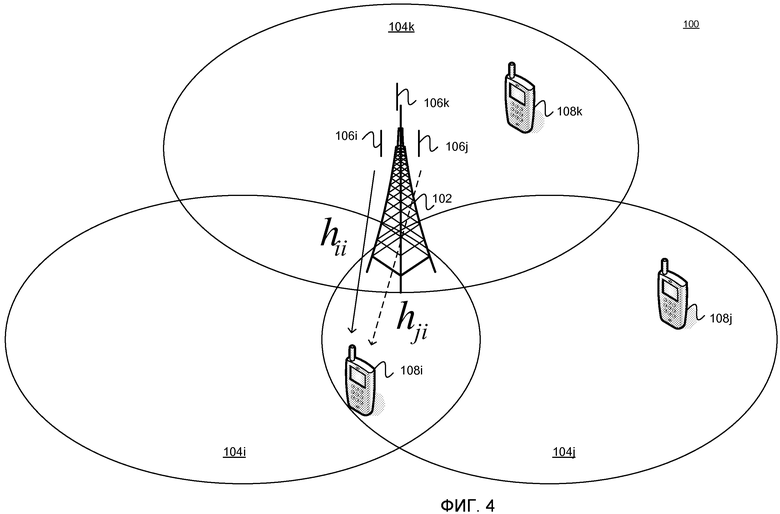
1. Устройство для беспроводной связи, содержащее
средство для предоставления зоны покрытия для первой соты посредством первой системы антенн,
средство для предоставления зоны покрытия для второй соты посредством второй системы антенн,
средство для обработки данных для передачи в подвижное устройство в первой соте с использованием первой и второй систем антенн,
средство для генерации первого и второго опорных сигналов для передачи в первую и вторую соты, соответственно, и
средство для выкалывания данных для передачи в первую соту или средство для выкалывания первого опорного сигнала,
причем выкалывание выполняется через разные подкадры.
2. Устройство по п.1, в котором средство для обработки данных использует оценку первого канала между первой системой антенн и подвижным устройством и оценку второго канала между второй системой антенн и подвижным устройством, чтобы обработать данные для передачи.
3. Устройство по п.2, дополнительно содержащее средство для приема оценок первого и второго канала из подвижного устройства.
4. Устройство по п.2, в котором:
средство для генерации генерирует не противоречащие первый и второй опорные сигналы для передачи в первую и вторую соты, соответственно,
когда средство выкалывания выкалывает данные для передачи в первую соту, чтобы дать возможность подвижному устройству генерировать оценку второго канала из второго опорного сигнала.
5. Устройство по п.2, в котором:
средство для генерации генерирует противоречащие первый и второй опорные сигналы для передачи в первую и вторую соты, соответственно,
когда средство для выкалывания выкалывает первый опорный сигнал, чтобы дать возможность подвижному устройству генерировать оценку второго канала из второго опорного сигнала.
6. Устройство по п.1, в котором средство для обработки данных обрабатывает данные для передачи множества пространственных потоков в подвижное устройство через первую и вторую системы антенн.
7. Устройство по п.1, в котором средство для обработки данных обрабатывает данные, чтобы сформировать диаграмму направленности для передачи данных в подвижное устройство через первую и вторую системы антенн.
8. Устройство по п.1, в котором средство для обработки данных использует пространственные измерения, чтобы уменьшить помехи.
9. Устройство по п.1, в котором средство для обработки данных предварительно кодирует данные на основании состояний каналов между подвижным устройством и первой и второй системами антенн.
10. Способ беспроводной связи, содержащий этапы, на которых
предоставляют зону покрытия для первой соты посредством первой системы антенн,
предоставляют зону покрытия для второй соты посредством второй системы антенн,
обрабатывают данные для передачи в подвижное устройство в первой соте с использованием первой и второй систем антенн,
генерируют первый и второй опорные сигналы для передачи в первую и вторую соты, соответственно, и
выкалывают данные для передачи в первую соту или выкалывают первый опорный сигнал,
причем выкалывание выполняют через разные подкадры.
11. Способ по п.10, в котором этап, на котором обрабатывают данные, содержит этап, на котором используют оценку первого канала между первой системой антенн и подвижным устройством и вторую оценку канала между второй системой антенн и подвижным устройством, чтобы обработать данные для передачи.
12. Способ по п.11, дополнительно содержащий этап, на котором принимают оценки первого и второго канала из подвижного устройства.
13. Способ по п.11, в котором
этап, на котором генерируют опорные сигналы, содержит этап, на котором генерируют не противоречащие первый и второй опорные сигналы для передачи в первую и вторую соты, соответственно,
когда выкалывают данные для передачи в первую соту, чтобы дать возможность подвижному устройству генерировать оценку второго канала из второго опорного сигнала.
14. Способ по п.11, в котором
этап, на котором генерируют опорные сигналы, содержит этап, на котором генерируют противоречащие первый и второй опорные сигналы для передачи в первую и вторую соты, соответственно,
когда выкалывают первый опорный сигнал, чтобы дать возможность подвижному устройству генерировать оценку второго канала из второго опорного сигнала.
15. Способ по п.10, в котором этап, на котором обрабатывают данные, содержит этап, на котором обрабатывают данные для передачи множества пространственных потоков в подвижное устройство через первую и вторую системы антенн.
16. Способ по п.10, в котором этап, на котором обрабатывают данные, содержит этап, на котором обрабатывают данные, чтобы сформировать
диаграмму направленности для передачи данных в подвижное устройство через первую и вторую системы антенн.
17. Способ по п.10, в котором этап, на котором обрабатывают данные, содержит этап, на котором используют пространственные измерения, чтобы уменьшить помехи.
18. Способ по п.10, в котором этап, на котором обрабатывают данные, содержит этап, на котором предварительно кодируют данные на основании состояний каналов между подвижным устройством и первой и второй системами антенн.
19. Устройство для беспроводной связи, содержащее
систему обработки, сконфигурированную для
предоставления зоны покрытия для первой соты посредством первой системы антенн,
предоставления зоны покрытия для второй соты посредством второй системы антенн,
обработки данных для передачи в подвижное устройство в первой соте с использованием первой и второй систем антенн,
генерации первого и второго опорных сигналов для передачи в первую и вторую соты, соответственно, и
выкалывания данных для передачи в первую соту или выкалывания первого опорного сигнала,
причем выкалывание выполняется через разные подкадры.
20. Устройство по п.19, в котором система обработки дополнительно сконфигурирована для обработки данных с использованием оценки первого канала между первой системой антенн и подвижным устройством и оценки второго канала между второй системой антенн и подвижным устройством, чтобы обработать данные для передачи.
21. Устройство по п.20, в котором система обработки дополнительно сконфигурирована для приема оценок первого и второго канала из подвижного устройства.
22. Устройство по п.20, в котором система обработки дополнительно сконфигурирована для
генерации не противоречащих первого и второго опорных сигналов для передачи в первую и вторую соты, соответственно,
когда выкалываются данные для передачи в первую соту, чтобы дать возможность подвижному устройству генерировать оценку второго канала из второго опорного сигнала.
23. Устройство по п.20, в котором система обработки дополнительно сконфигурирована для
генерации противоречащих первого и второго опорных сигналов для передачи в первую и вторую соты, соответственно,
когда выкалывается первый опорный сигнал, чтобы дать возможность подвижному устройству генерировать оценку второго канала из второго опорного сигнала.
24. Устройство по п.19, в котором система обработки дополнительно сконфигурирована для обработки данных для передачи множества пространственных потоков в подвижное устройство через первую и вторую системы антенн.
25. Устройство по п.19, в котором система обработки дополнительно сконфигурирована для обработки данных, чтобы сформировать диаграмму направленности для передачи данных в подвижное устройство через первую и вторую системы антенн.
26. Устройство по п.19, в котором система обработки дополнительно сконфигурирована для обработки данных с использованием пространственных измерений, чтобы уменьшить помехи.
27. Устройство по п.19, в котором система обработки дополнительно сконфигурирована для предварительного кодирования данных на основании состояний каналов между подвижным устройством и первой и второй системами антенн.
28. Компьютерно-читаемый носитель, содержащий сохраненные на нем коды, которые, при исполнении компьютером, предписывают компьютеру выполнять способ беспроводной связи, причем коды содержат
код для предоставления зоны покрытия для первой соты посредством первой системы антенн,
код для предоставления зоны покрытия для второй соты посредством второй системы антенн,
код для обработки данных для передачи в подвижное устройство в первой соте с использованием первой и второй систем антенн,
код для генерации первого и второго опорных сигналов для передачи в первую и вторую соты, соответственно, и
код для выкалывания данных для передачи в первую соту или выкалывания первого опорного сигнала,
причем код для выкалывания исполняют через разные подкадры.
29. Компьютерно-читаемый носитель по п.28, в котором код для обработки данных содержит код для использования оценки первого канала между первой системой антенн и подвижным устройством и оценки второго канала между второй системой антенн и подвижным устройством, чтобы обработать данные для передачи.
30. Компьютерно-читаемый носитель по п.29, дополнительно содержащий код для приема оценок первого и второго канала из подвижного устройства.
31. Компьютерно-читаемый носитель по п.29, в котором код для генерации опорных сигналов содержит код для генерации не
противоречащих первого и второго опорных сигналов для передачи в первую и вторую соты, соответственно,
когда код для выкалывания предписывает компьютеру выкалывать данные для передачи в первую соту, чтобы дать возможность подвижному устройству генерировать оценку второго канала из второго опорного сигнала.
32. Компьютерно-читаемый носитель по п.29, в котором
код для генерации опорных сигналов содержит код для генерации
противоречащих первого и второго опорных сигналов для передачи в первую и вторую соты, соответственно,
когда код для выкалывания предписывает компьютеру выкалывать первый опорный сигнал, чтобы дать возможность подвижному устройству генерировать оценку второго канала из второго опорного сигнала.
33. Компьютерно-читаемый носитель по п.28, в котором код для обработки данных содержит код для обработки данных для передачи множества пространственных потоков в подвижное устройство через первую и вторую системы антенн.
34. Компьютерно-читаемый носитель по п.28, в котором код для обработки данных содержит код для обработки данных, чтобы сформировать диаграмму направленности для передачи данных в подвижное устройство через первую и вторую системы антенн.
35. Компьютерно-читаемый носитель по п.28, в котором код для обработки данных содержит код для использования пространственных измерений, чтобы уменьшить помехи.
36. Компьютерно-читаемый носитель по п.28, в котором код для обработки данных содержит код для предварительного кодирования данных на основании состояний каналов между подвижным устройством и первой и второй системами антенн.
| Устройство для мокрого кручения пряжи | 1991 |
|
SU1802000A1 |
| ЕР 1850508 А2, 31.10.2007 | |||
| US 2007274409 А1, 29.11.2007 | |||
| US 2006072682 А1, 06.04.2006 | |||
| US 2008130803 А1, 05.06.2008 | |||
| RU 2005121540 A, 27.01.2006 | |||
| US 2006068709 A1, 30.03.2006 | |||
| RU 2005115857 A, 20.01.2006 | |||
| KIM JEE HYUN ET AL: Efficient Feedback via Subspace-Based Channel Quantization for Distributed Cooperative Antenna | |||

