Область техники, к которой относится изобретение
Настоящее изобретение относится к системе беспроводной связи, в частности, относится к способу и устройству для процедуры позиционирования, включающей в себя измерение для позиционирования.
Уровень техники
Системы беспроводного доступа широко развернуты для того, чтобы предоставлять различные типы услуг связи, таких как голос или данные. В общем, система беспроводного доступа представляет собой систему с множественным доступом, которая поддерживает связь множества пользователей за счет совместного использования доступных системных ресурсов (полосы пропускания, мощности передачи и т.д.) между ними. Например, системы с множественным доступом включают в себя, например, систему с множественным доступом с кодовым разделением каналов (CDMA), систему с множественным доступом с частотным разделением каналов (FDMA), систему с множественным доступом с временным разделением каналов (TDMA), систему с множественным доступом с ортогональным частотным разделением каналов (OFDMA) и систему с множественным доступом с частотным разделением каналов с одной несущей (SC-FDMA).
Сущность изобретения
Техническая задача
Цель настоящего изобретения заключается в том, чтобы предоставлять способ эффективного и точного выполнения процедуры позиционирования и устройства для этого.
Специалисты в данной области техники должны принимать во внимание, что цели, которые могут достигаться с помощью настоящего изобретения, не ограничены тем, что конкретно описано выше, и вышеуказанные и другие цели, которых может достигать настоящее раскрытие сущности, должны более ясно пониматься из нижеприведенного подробного описания.
Техническое решение
В аспекте настоящего изобретения, способ выполнения измерения для позиционирования посредством пользовательского оборудования (UE) в системе беспроводной связи может содержать выполнение измерения первого типа для позиционирования, включающего в себя измерение фазы несущей (СРМ); выполнение измерения второго типа для позиционирования, которое отличается от измерения первого типа; и формирование сообщений по измерению первого типа и измерению второго типа, при этом число моментов времени, связанных с измерением второго типа, может быть равно или больше числа моментов времени для измерения первого типа.
Предпочтительно, измерение первого типа может выполняться на основе одного момента времени, и измерение второго типа может выполняться на основе нескольких моментов времени.
Предпочтительно, один результат, полученный из измерения второго типа, может быть ассоциирован с множеством результатов, полученных из измерения первого типа.
Предпочтительно, множество результатов, полученных из измерения первого типа, могут иметь множество значений временных меток, отличающихся друг от друга.
Предпочтительно, UE может передавать сообщение с характеристиками UE, включающее в себя, по меньшей мере, одно из первой информации относительно того, поддерживает или нет UE измерение первого типа, и второй информации, связанной с числом моментов времени, поддерживаемых посредством UE для измерения второго типа.
Предпочтительно, UE может принимать третью информацию относительно числа моментов времени, связанных с измерением второго типа.
Предпочтительно, третья информация может включать в себя минимальное число моментов времени, связанных с измерением второго типа.
Предпочтительно, UE может передавать предпочитаемое посредством UE число моментов времени, связанных с измерением второго типа.
Предпочтительно, измерение первого типа и измерение второго типа могут сообщаться в одном сообщении по измерениям.
Предпочтительно, одно сообщение по измерениям может включать в себя число моментов времени, связанных с измерением второго типа.
Предпочтительно, одно сообщение по измерениям может включать в себя информацию временной метки для измерения первого типа.
Предпочтительно, информация временной метки для измерения первого типа может представлять момент времени, в который выполняется измерение первого типа.
Предпочтительно, измерение второго типа может включать в себя, по меньшей мере, одно из измерения на основе разности времен опорных сигналов нисходящей линии связи (DL-RSTD), относительного времени поступления сигналов в восходящей линии связи (UL-RTOA) или измерения разности времени приема-передачи.
Энергонезависимый носитель, сохраняющий инструкции, которые инструктируют процессору осуществлять способ, может предоставляться согласно другому аспекту настоящего изобретения.
Устройство, осуществляющее способ выполнения измерения для позиционирования, может предоставляться согласно другому аспекту настоящего изобретения.
Преимущества изобретения
Согласно настоящему раскрытию сущности, процедура позиционирования может эффективно и точно выполняться в системе беспроводной связи.
Специалисты в данной области техники должны принимать во внимание, что выгоды, которые могут достигаться с помощью настоящего изобретения, не ограничены тем, что конкретно описано выше, и другие преимущества настоящего изобретения должны более ясно пониматься из нижеприведенного подробного описания, рассматриваемого в сочетании с прилагаемыми чертежами.
Краткое описание чертежей
Фиг. 1 иллюстрирует физические каналы и общий способ передачи сигналов с использованием физических каналов в системе по стандарту Партнерского проекта третьего поколения (3GPP) в качестве примерной системы беспроводной связи;
Фиг. 2 иллюстрирует архитектуру 5С-системы, применимой к позиционированию UE, соединенного с NG-RAN или E-UTRAN;
Фиг. 3 иллюстрирует способ позиционирования на основе наблюдаемой разности времен поступления сигналов (OTDOA);
Фиг. 4 иллюстрирует разрешение целочисленной неоднозначности для ТоА четырех различных (правильных) наборов BS;
Фиг. 5 иллюстрирует отбрасывание выбросовых значений посредством минимизации MSE наблюдений;
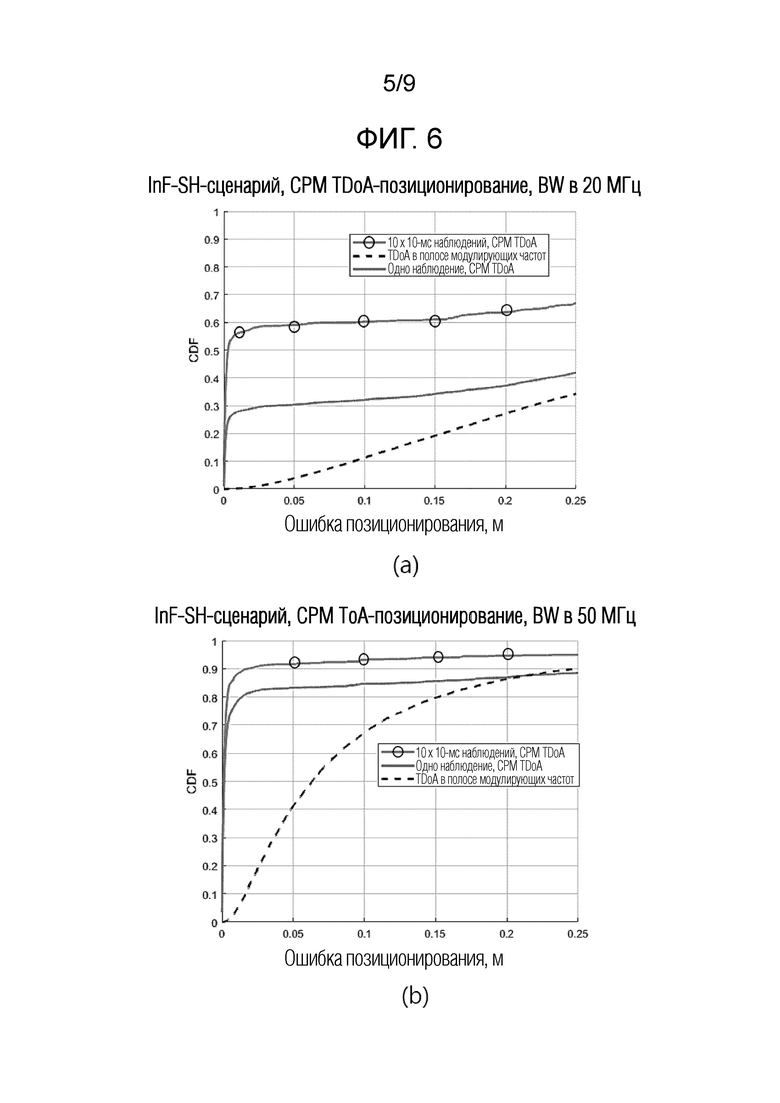
Фиг. 6 иллюстрирует увеличение производительности вследствие надлежащей обработки последовательных серий PRS-кадров;
Фиг. 7 иллюстрирует обмен сообщениями во время СР-позиционирования;
Фиг. 8 иллюстрирует измерения при позиционировании UE в варианте осуществления настоящего изобретения;
Фиг. 9 иллюстрирует способ выполнения измерения для позиционирования согласно варианту осуществления настоящего изобретения;
Фиг. 10 иллюстрирует примерную систему связи, применяемую к настоящему раскрытию сущности; и
Фиг. 11 иллюстрирует примерное беспроводное устройство, применимое к настоящему раскрытию сущности.
Оптимальный режим осуществления изобретения
Следующая технология может использоваться в различных системах беспроводного доступа, таких как множественный доступ с кодовым разделением каналов (CDMA), множественный доступ с частотным разделением каналов (FDMA), множественный доступ с временным разделением каналов (TDMA), множественный доступ с ортогональным частотным разделением каналов (0FDMA), множественный доступ с частотным разделением каналов с одной несущей (SC-FDMA) и т.д. CDMA может реализовываться как технология радиосвязи, такая как универсальный наземный радиодоступ (UTRA) или CDMA2000. TDMA может реализовываться как технология радиосвязи, такая как глобальная система мобильной связи (GSM)/общая служба пакетной радиопередачи (GPRS)/развитие стандарта GSM с увеличенной скоростью передачи данных (EDGE). 0FDMA может реализовываться как технология радиосвязи, такая как стандарт 802.11 Института инженеров по электротехнике и радиоэлектронике (IEEE) (стандарт высококачественной
беспроводной связи (Wi-Fi)), IEEE 802.16 (стандарт общемировой совместимости широкополосного беспроводного доступа (WiMax)), IEEE 802.20, усовершенствованный UTRA (E-UTRA) и т.д. UTRA составляет часть универсальной системы мобильной связи (UMTS). Стандарт долгосрочного развития (LTE) партнерского проекта третьего поколения (3GPP) составляет часть усовершенствованной UMTS (E-UMTS) с использованием E-UTRA, и усовершенствованный стандарт LTE (LTE-A) представляет собой развитие 3GPP LTE. Новый 3GPP-стандарт радиосвязи или технология доступа на основе нового стандарта радиосвязи (NR) представляет собой усовершенствованную версию 3GPP LTE/LTE-A.
По мере того, как все больше устройств связи требуют больших пропускных способностей связи, возникает потребность в связи на основе усовершенствованного стандарта широкополосной связи для мобильных устройств относительно унаследованных технологий радиодоступа (RAT). Массовая машинная связь (МТС), предоставляющая различные услуги взаимосвязанным нескольким устройствам и вещам в любое время в любом месте, представляет собой одну из важнейших проблем, которые должны разрешаться для связи следующего поколения. Также обсуждается проектное решение по системе связи, в котором рассматриваются услуги, чувствительные к надежности и времени задержки. В связи с этим, обсуждается введение технологии радиодоступа (RAT) следующего поколения для связи на основе усовершенствованного стандарта широкополосной связи для мобильных устройств (еМВВ), массовой МТС (тМТС) и стандарта сверхнадежной связи с низкой задержкой (URLLC). Для удобства, эта технология называется "NR" или "новой RAT" в настоящем раскрытии сущности.
Хотя нижеприведенное описание приводится в контексте 3GPP-системы связи (например, NR) для ясности, техническая сущность настоящего изобретения не ограничена 3GPP-системой связи. Для предшествующего уровня техники, термины и сокращения, используемые в настоящем раскрытии сущности, ссылаются на технические условия, опубликованные до настоящего изобретения (например, 3GPP TS 38.211, 38.212, 38.213, 38.214, 38.300, 38.331 и т.д.).
В системе беспроводного доступа, пользовательское оборудование (UE) принимает информацию из базовой станции (BS) по DL и передает информацию в BS по UL. Информация, передаваемая и принимаемая между UE и BS, включает в себя общие данные и различные типы управляющей информации. Предусмотрено множество физических каналов согласно типам/вариантам использования информации, передаваемой и принимаемой между BS и UE.
Фиг. 1 иллюстрирует физические каналы и общий способ передачи сигналов с использованием физических каналов в 3GPP-системе.
Когда UE включается или входит в новую соту, UE выполняет начальный поиск сот (S11). Начальный поиск сот заключает в себе получение синхронизации с BS. С этой целью, UE принимает блок сигналов синхронизации (SSB) из BS. SSB включает в себя сигнал первичной синхронизации (PSS), сигнал вторичной синхронизации (SSS) и физический широковещательный канал (РВСН). UE синхронизирует свою временную синхронизацию с BS и получает такую информацию, как идентификатор соты на основе PSS/SSS. Дополнительно, UE может получать информацию, передаваемую в широковещательном режиме в соте, посредством приема РВСН из BS. Во время начального поиска сот, UE также может отслеживать состояние DL-каналов посредством приема опорного сигнала нисходящей линии связи (DL RS).
После начального поиска сот, UE может получать более подробную системную информацию посредством приема физического канала управления нисходящей линии связи (PDCCH) и физического совместно используемого канала нисходящей линии связи (PDSCH), соответствующего PDCCH (S12).
Затем, чтобы завершать соединение с BS, UE может выполнять процедуру произвольного доступа с BS (S13-S16). В частности, UE может передавать преамбулу по физическому каналу с произвольным доступом (PRACH) (S13) и может принимать PDCCH и ответ по произвольному доступу (RAR) для преамбулы по PDSCH, соответствующему PDCCH (S14). UE затем может передавать физический совместно используемый канал восходящей линии связи (PUSCH) посредством использования информации диспетчеризации в RAR (S15) и выполнять процедуру разрешения коллизий на основе конкуренции, включающую в себя прием PDCCH- и PDSCH-сигнала, соответствующего PDCCH (S16).
Когда процедура произвольного доступа выполняется на двух этапах, этапы S13 и S15 могут выполняться в качестве одного этапа (на котором сообщение А передается посредством UE), и этапы S14 и S16 могут выполняться в качестве одного этапа (на котором сообщение В передается посредством BS).
После вышеуказанной процедуры, UE может принимать PDCCH и/или PDSCH из BS (S17) и передавать физический совместно используемый канал восходящей линии связи (PUSCH) и/или физический канал управления восходящей линии связи (PUCCH) в BS (S18) в общей процедуре передачи UL/DL-сигналов. Управляющая информация, которую UE передает в BS, обобщенно называется "управляющей информацией восходящей линии связи (UCI)". UCI включает в себя подтверждение приема/отрицание приема гибридного автоматического запроса на повторную передачу (HARQ-ACK/NACK), запрос на диспетчеризацию (SR), информацию состояния канала (CSI) и т.д. CSI включает в себя индикатор качества канала (CQI), индекс матрицы предварительного кодирования (PMI), индикатор ранга (RI) и т.д. В общем, UCI передается по PUCCH. Тем не менее, если управляющая информация и данные должны передаваться одновременно, управляющая информация и данные могут передаваться по PUSCH. Помимо этого, UE может передавать UCI апериодически по PUSCH, при приеме запроса/команды из сети.
UE может выполнять процедуру доступа к сети, чтобы выполнять описанные/предложенные процедуры и/или способы. Например, UE может принимать и сохранять системную информацию и конфигурационную информацию, требуемую для того, чтобы выполнять вышеописанные/предложенные процедуры и/или способы во время доступа к сети (например, к BS). Конфигурационная информация, требуемая для настоящего изобретения, может приниматься посредством служебных сигналов верхнего уровня (например, служебных сигналов на уровне управления радиоресурсами (RRC), служебных сигналов на уровне управления доступом к среде (MAC) и т.п.).
Позиционирование
Позиционирование может означать определение географической позиции и/или скорости UE на основе измерения радиосигналов. Информация местоположения может запрашиваться и сообщиться клиенту (например, приложению), ассоциированному с в UE. Информация местоположения также может запрашиваться посредством клиента, внутри или соединенного с базовой сетью. Информация местоположения может сообщаться в стандартных форматах, к примеру, в форматах для координат на основе соты или географических координат, вместе с оцененными ошибками позиции и скорости UE и/или способом позиционирования, используемым для позиционирования.
Фиг. 2 иллюстрирует архитектуру 5С-системы, применимой к позиционированию UE, соединенного с NG-RAN или E-UTRAN.
Ссылаясь на фиг. 2, AMF может принимать запрос на услугу определения местоположения, ассоциированную с конкретным целевым UE, из другого объекта, такого как шлюзовой центр определения местоположения мобильных устройств (GMLC), либо AMF непосредственно определяет необходимость инициировать услугу определения местоположения от имени конкретного целевого UE. После этого AMF передает запрос на услугу определения местоположения в функцию управления местоположением (LMF). При приеме запроса на услугу определения местоположения, LMF может обрабатывать запрос на услугу определения местоположения и затем возвращает результат обработки, включающий в себя оцененную позицию UE, в AMF. В случае услуги определения местоположения, запрашиваемой посредством такого объекта, как GMLC, отличного от AMF, AMF может передавать результат обработки, принимаемый из LMF, в этот объект.
Усовершенствованный NB нового поколения (ng-eNB) и gNB представляют собой сетевые элементы NG-RAN, допускающей предоставление результата измерений для позиционирования. Ng-eNB и gNB могут измерять радиосигналы для целевого UE и передают значение результата измерений в LMF. Ng-eNB может управлять несколькими TP, такими как удаленные радиоголовки или TP только для PRS для поддержки радиомаяковой системы на основе PRS для Е-UTRA.
LMF соединяется с усовершенствованным обслуживающим центром определения местоположения мобильных устройств (E-SMLC), который может обеспечивать возможность LMF осуществлять доступ к Е-UTRAN. Например, E-SMLC может обеспечивать возможность LMF поддерживать OTDOA, которая представляет собой один из способов позиционирования E-UTRAN, с использованием DL-измерения, полученного посредством целевого UE через сигналы, передаваемые посредством eNB и/или TP только для PRS в E-UTRAN.
LMF может соединяться с SUPL-платформой определения местоположения (SLP). LMF может поддерживать и управлять различными услугами определения местоположения для целевых UE. LMF может взаимодействовать с обслуживающим ng-eNB или обслуживающим gNB для целевого UE, с тем чтобы получать измерение позиции для UE. Для позиционирования целевого UE, LMF может определять способы позиционирования, на основе типа клиентов услуги определения местоположения (LCS), требуемого качества обслуживания (QoS), характеристик позиционирования UE, характеристик позиционирования gNB и характеристик
позиционирования ng-eNB и затем применять эти способы позиционирования к обслуживающему gNB и/или обслуживающему ng-eNB. LMF может определять дополнительную информацию, такую как точность оценки местоположения и скорость целевого UE. SLP представляет собой объект защищенного определения местоположения в пользовательской плоскости (SUPL), отвечающий за позиционирование в пользовательской плоскости.
UE может измерять свою позицию с использованием DL-RS, передаваемых посредством NG-RAN и E-UTRAN. DL-RS, передаваемые посредством NG-RAN и E-UTRAN в UE, могут включать в себя SS/РВСН-блок, CSI-RS и/или PRS. То, какой DL-RS используется для того, чтобы измерять позицию UE, может соответствовать конфигурации LMF/Е-SMLC/ng-eNB/E-UTRAN и т.д. Позиция UE может измеряться посредством независимой от RAT схемы с использованием различных глобальных навигационных спутниковых систем (GNSS), наземных радиомаяковых систем (TBS), точек доступа к WLAN, маяковых Bluetooth-радиосигналов и датчиков (например, барометрических датчиков), установленных в UE. UE также может содержать LCS-приложения или осуществлять доступ к LCS-приложению через связь с сетью, доступной за счет этого, либо через другое приложение, содержащееся в нем. LCS-приложение может включать в себя функции измерения и вычисления, требуемые для того, чтобы определять позицию UE. Например, UE может содержать независимую функцию позиционирования, такую как глобальная система позиционирования (GPS), и сообщать свою позицию независимо от NG-RAN-передачи. Такая независимо полученная информация позиционирования может использоваться в качестве вспомогательной информации для информации позиционирования, полученной из сети.
Способы позиционирования, поддерживаемые в NG-RAN, могут включать в себя GNSS, OTDOA, E-CID, позиционирование по барометрическим датчикам, WLAN-позиционирование, Bluetooth-позиционирование, TBS, разность времен поступления сигналов в восходящей линии связи (UTDOA) и т.д. Хотя любой из способов позиционирования может использоваться для позиционирования UE, два или более способов позиционирования могут использоваться для позиционирования UE.
Фиг. 3 является схемой, иллюстрирующей способ позиционирования на основе наблюдаемой разности времен поступления сигналов (OTDOA);
Способ OTDOA-позиционирования использует время, измеренное для DL-сигналов, принимаемых из нескольких TP, включающих в себя eNB, ng-eNB и TP только для PRS, посредством UE. UE измеряет время принимаемых DL-сигналов с использованием вспомогательных данных по определению местоположения, принимаемых из сервера определения местоположения. Позиция UE может определяться на основе такого результата измерений и географических координат соседних ТР.
UE, соединенное с gNB, может запрашивать интервалы отсутствия сигнала для измерений, чтобы выполнять OTDOA-измерение, из ТР. Если UE не имеет сведений по SFN, по меньшей мере, одной TP во вспомогательных OTDOA-данных, UE может использовать автономные интервалы отсутствия сигнала, чтобы получать SFN опорной OTDOA-соты, до запроса интервалов отсутствия сигнала для измерений для выполнения измерения разности времен поступления опорных сигналов (RSTD).
Здесь, RSTD может задаваться как наименьшая относительная разность времен между двумя границами субкадров, принимаемыми из опорной соты и измеряемой соты. Таким образом, RSTD может вычисляться как относительная разность времен между начальным временем субкадра, принимаемого из измеряемой соты, и начальным временем субкадра из опорной соты, который является ближайшим к субкадру, принимаемому из измеряемой соты. Опорная сота может выбираться посредством UE.
Для точного OTDOA-измерения, необходимо измерять время поступления сигналов (ТоА) сигналов, принимаемых из географически распределенных трех или более TP или BS. Например, ТоА для каждой TP 1, TP 2 и TP 3 может измеряться, и RSTD для TP 1 и TP 2, RSTD для TP 2 и TP 3 и RSTD для TP 3 и TP 1 вычисляются на основе трех ТоА-значений. Геометрическая гипербола определяется на основе вычисленных RSTD-значений, и точка, в которой кривые гиперболы пересекаются, может оцениваться в качестве позиции UE. В этом случае, может возникать точность и/или неопределенность для каждого ТоА-измерения, и оцененная позиция UE может быть известной как конкретная дальность согласно неопределенности измерения.
Позиционирование по фазе несущей (СРР)
Следующие документы содержатся по ссылке:
[1] Intel, "Revised SID on Study on expanded and improved NR positioning" RP-213588, e-Meeting, 6-17 декабря 2021 года
[2] RANI Chair's Notes, RANI #109-e, e-Meeting, 9-20 мая 2022 года
[3] LGE, "Discussion on OFDM based carrier phase measurement in NR", R1-2207710, Тулуза, Франция, 22-26 августа 2022 года
[4] Han Dun, Christian С.J. M. Tiberius and Gerard J. M. Janssen "Positioning in the multipath channel using OFDM signals with carrier phase tracking", IEEE Access, издание 8, стр. 13011-13028, январь 2020 года 5G NR продолжает экспансию в отношении пополнения своей функциональности на новые области и варианты использования. Функциональность позиционирования, управления местоположением представляет собой очень полезный вспомогательный признак любой системы связи, и ее разработка продолжается в рамках технических требований. Начиная с простейшего местоположения на основе сот/секторов в 2G/36-системах, точность позиционирования значительно повышена в LTE-версиях. Масштабируемая архитектура 5G обеспечивает возможность постановки более сложных задач для позиционирования и рассматривает сценарии, которые могут требовать миллиметровой точности. Один из примеров такой модели сценариев/вариантов использования представляет собой "крытый завод", в котором датчики на основе 5G-NR могут помогать отслеживать перемещения контейнеров и частей. Варианты применения в робототехнике и на производстве требуют чрезвычайно точного позиционирования, которое не может достигаться посредством традиционных средств.
Использование традиционных способов позиционирования на основе корреляции налагает минимальные требования на синхронизацию/взаимодействие радиочастотных ТХ- и RX-цепочек и приемо-передающих устройств. Для таких подходов, точность сильно зависит от полосы пропускания сигнала и в силу этого ограничена посредством объема доступных ресурсов.
Субсантиметровая и миллиметровая точность позиционирования в этом случае может достигаться только на верхних FR2-4acTOTax, когда большая полоса пропускания может выделяться для целей позиционирования. Хотя для FR1-частот ниже 6 ГГц, полная BW и в силу этого точность позиционирования с использованием способов корреляции в полосе модулирующих частот и CIR-оценки ограничена.
Один из многообещающих подходов к высокоточному позиционированию заключается в позиционировании по фазе несущей (СРР) на основе измерений фазы несущей (СРМ). Для таких подходов, точность зависит главным образом от частоты фазы несущей, которая может существенно превышать BW сигнала.
Тем не менее, способность оценивать и отслеживать фазу несущей сигналов налагает строгие требования по стабильности генераторов и необходимости выполнять калибровку и синхронизацию ТХ/RX-цепочек. Различные способы нахождения разностей и двойного нахождения разностей могут использоваться для того, чтобы разрешать вышеуказанные трудности.
Даже в случае идеальной фазовой синхронизации ТХ и RX, возникает фундаментальная проблема периодичности фазы - точное знание фазы сигнала обеспечивает только дробную часть измерений расстояния на основе длины волны, тогда как целочисленная часть не может получаться исключительно через измерения фазы. Это представляет собой проблему, известную как разрешение целочисленной неоднозначности (IAR). Способы для разрешения целочисленной неоднозначности успешно работают в GPS-системах и также рассматриваются для СРМ-позиционирования в OFDM-системах [4]. Типичные решения, которые помогают разрешать целочисленную неоднозначность в современной системе связи для позиционирования, являются следующими:
- Использование нескольких (трех или более) несущих;
- Использование нескольких опорных точек (спутников) для двойного нахождения разностей и TDoA-позиционирования; и/или
- Использование постоянных сигналов, что обеспечивает возможность отслеживания объектов.
Для системы позиционирования по фазе несущей на основе 5G NR-инфраструктуры, использование нескольких несущих для единственной цели позиционирования является очень нежелательным и в силу этого не рассматривается. Одновременно сетевой трафик с коммутацией пакетов с несколькими пользователями, передающими данные, в качестве основной задачи с позиционированием в качестве вторичного признака, постоянный поток специализированных сигналов позиционирования является невозможным. Регулярные обновления оценки расстояния могут не быть доступными для 5G NR-системы вследствие приоритезации трафика и нагрузки системы.
Таким образом, для 5G NR СРР необходимо предлагать технологию, которая обеспечивает возможность надежного IAR на основе одной несущей в режиме с коммутацией пакетов на основе одного или нескольких последовательных наблюдений (нескольких выборок/экземпляров).
Рассмотрим позиционирование по ТоА-геометрии в качестве некоторой функции от TRP-координат  из поднабора М базовых станций и измеренных расстояний между выбранным UE и m-ой TRP:
из поднабора М базовых станций и измеренных расстояний между выбранным UE и m-ой TRP:

Уравнение 1 может использоваться для того, чтобы получать приблизительную оценку ТоА-позиции, посредством использования субоптимального набора станций, как пояснено в предыдущем разделе.
За счет измерений расстояния по фазе несущей, может обеспечиваться высокоточная оценка дробной части длины волны измеренного расстояния. Оценка по фазе несущей полного расстояния должна состоять из целого числа N и дробной части Л, как показано в уравнении 2.

За счет приблизительных измерений расстояния на основе базовой линии, исходное предположение в отношении целочисленной неоднозначности может представляться как уравнение 3:

Тем не менее, это исходное предположение может отличаться от действительного значения N на величину, заданную посредством точности базового алгоритма измерений дальности. Для простоты, предположим, что может рассматриваться 95-99%-й доверительный интервал оценки d расстояния, который может выражаться в длинах волн. Например, для хороших оценок в 100 МГц, значение дальности может составлять в пределах трех длин волн от исходного приблизительного предположения (N=3). При обозначении этого целочисленного значения ошибки в качестве K, настройка может быть следующей:

За счет такой подготовки, облако точек в трехмерном пространстве может получаться, согласно решению уравнения 1 для всех возможных значений N:

Поскольку для каждой TRP и соответствующего измерения d расстояния поиск должен выполняться независимо, общее число точек в облаке должно быть равным (2K+1)М.
Уравнение 5 предоставляет облако точек для каждого возможного целого числа длин волн в расчете на измеренное расстояние. Истинная позиция расположена в числе них, но одного облака недостаточно для разрешений неоднозначности. С учетом однопакетного измерения и отсутствия возможности использовать различные наблюдения времени, другие наборы BS могут использоваться для формирования других облаков точек. Нахождение точки, общей для всех облаков, может предоставлять решение целочисленной неоднозначности (см. фиг. 4). Дополнительно, другие ограничения и функции затрат могут использоваться для того, чтобы выбирать истинную точку между облаками.
Результаты моделирований, показывающие то, что для типичного тестового СРР-сценария, Indoor factory (InF), подход на основе одного наблюдения может обеспечивать надежное IAR только для относительно большой BW сигнала (приблизительно в 100 МГц). При такой BW, исходное приблизительное предположение уже является довольно точным, и IAR-алгоритмы хорошо работают.
Тем не менее для меньшей BW сигнала, приблизительно в 20-50 МГц, одного измерения недостаточно для того, чтобы достигать целевой точности и даже достигать 90%-й надежности IAR. Таким образом, обработка на основе нескольких наблюдений должна быть предусмотрена, и несколько последовательных PRS должны отправляться.
Обработка нескольких наблюдений может включать в себя следующие этапы:
Увеличение точности приблизительной оценки в полосе модулирующих частот (уравнение 1)
Увеличение точности IAR-разрешения в любом случае посредством отбрасывания выбросовых IAR-значений посредством использования технологии MSE-минимизации (см. фиг. 5)
Применение обеих технологий может значительно увеличивать IAR-надежность для сигналов с меньшей BW.
Результаты моделирования на фиг. 6 показывают увеличение производительности вследствие надлежащей обработки
последовательных серий PRS-кадров с периодом в 10 мс.
Можно видеть, что для (а) 20 МГц, корректная IAR-вероятность удвоена, тогда как для (b) 50 МГц, важный 90%-й процентиль CDF-уровня может достигаться с помощью предложенной обработки.
В соответствии с вариантом осуществления настоящего изобретения, способ комбинирования нескольких наблюдений может предоставляться для позиционирования по фазе несущей в 5G NR-системе.
Между тем существующий 5С-стандарт уже имеет механизмы для последовательной PRS-передачи, с данными информационными элементами числа повторений (dl-PRS-ResourceRepetitionFactor-г1б) и длительности между повторениями (dl-PRS-ResourceTimeGap-г16). Здесь механизм на основе повторений, включенный в существующий 5С-стандарт, вводится для того, чтобы улучшать SINR и повышать точность в случае чрезвычайно плохого состояния канала и больших дальностей. Тем не менее этот механизм на основе повторений не инициируется для типично хороших ситуаций, когда СРР является возможным.
Таким образом, чтобы обеспечивать возможности повторяющихся PRS-передач даже при хорошем SNR, TRP должна знать связанные с СРР характеристики для сети (LMF, функции управления местоположением). Таким образом, конкретное сообщение
относительно повторяющейся последовательной обработки должно вводиться в обмене связанными с СРР сообщениями (см. фиг. 7).
(1) Примечания
Как пояснено выше:
Использование нескольких наблюдений позволяет повышать TDoA/ТоА-производительность.
- Более высокая TDoA/ToA-точность может ожидаться по мере того, как большее число наблюдений используется.
Повышенная TDoA/ТоА-точность может помогать увеличивать оценку на основе целочисленных значений.
- Как следствие, СРР-точность может повышаться значительно, в частности, для меньшего BW-размера.
Наоборот, точность измерения фазы с трудом может повышаться при усреднении нескольких наблюдений в силу фазового варьирования вследствие мобильности UE.
Следовательно, значение фазы должно измеряться с использованием одного наблюдения.
(2) Исходные данные
В существующем 5С-стандарте:
- Вплоть до 4 наблюдений могут использоваться для TDoA/ТоА-измерения.
"Временная метка" может сообщаться вместе с измерением при позиционировании (например, TDoA/ToA), чтобы информировать LMF касательно информации относительно временной синхронизации, с которой UE выполняет измерения при позиционировании.
Временная метка представляет собой индекс кадра/временного кванта, в котором UE измеряет PRS. Одна временная метка сообщается, даже когда несколько наблюдений используются для измерения, и именно UE должно выбирать конкретное из них.
Вспомогательные данные могут использоваться для того, чтобы помогать LMF/gNB/UE при связанных с позиционированием операциях. Например, они могут использоваться посредством LMF для того, чтобы рекомендовать для UE подходящее число наблюдений для измерения при позиционировании.
Передача в служебных сигналах характеристик может использоваться для того, чтобы информировать gNB/LMF касательно характеристик для конкретной операции UE. На основе сообщенных характеристик UE, LMF/gNB может определять то, какой признак может использоваться посредством UE, и его ассоциированное ограничение (например, число наблюдений, которое UE может использовать для измерения),
(3) Предложения
С учетом "(1) Примечания" и "(2) Исходные данные" (чтобы улучшать существующий 5С-стандарт ввиду (1)):
- Когда UE сообщает СРМ вместе с ОРМ (другими измерениями при позиционировании) (например, DL-RSTD, UL-RTOA или разностью Rx-Tx-времен UE/TRP), М>1 выборок (экземпляров) могут использоваться для ОРМ, тогда как N=1 выборка (экземпляр) используется для СРМ.
- UE может сообщать характеристики UE для поддержки СРР в LMF/gNB, и оно ожидает, что N=1 сконфигурировано по умолчанию.
UE может сообщать характеристики UE для поддержки измерений на основе измерения М выборок (или экземпляров) набора DL-PRS-ресурсов в LMF/gNB.
LMF может указывать для UE/gNB минимальное значение М, которое требуется для ОРМ-измерения
UE может предоставлять для LMF вспомогательные данные, содержащие предпочтительное значение М
LMF может предоставлять для UE/gNB вспомогательные данные, содержащие рекомендацию по значению М
UE/gNB может сообщать фактическое значение М, которое используется для измерения ОРМ, вместе с измерениями при позиционировании в сообщении по измерениям при позиционировании.
- Когда UE сообщает СРМ вместе с ОРМ, временная метка может сообщаться в идентичном сообщении по измерениям, при этом временная метка представляет момент времени, в который UE измеряет СРМ.
В NR Rel-18-позиционировании, поддержка в UE возможности сообщать СРМ (измерение фазы несущей) вместе с ОРМ (другими измерениями при позиционировании; например, RSTD, RTOA или разностью Rx-Tx-времен) рассматривается для СРР
(позиционирования на основе фазы несущей).
Как пояснено выше, ОРМ может использоваться для того, чтобы разрешать проблему целочисленной неоднозначности, и точное местоположение UE может оцениваться через СРМ.
Согласно результатам оценки, следует отметить, что чем выше ОРМ-точность, тем выше СРР-точность.
Кроме того, более высокая ОРМ-точность может получаться по мере того, как большее число выборок используется для измерения.
В NR-позиционировании, М=4 выборки используются для того, чтобы получать ОРМ в качестве способа на основе базовой линии.
Несколько выборок обычно гарантируют высокую точность в большинстве измерений при позиционировании (например, в способе позиционирования во временной области).
Наоборот, точность измерения фазы с трудом может повышаться при усреднении нескольких наблюдений в силу фазового варьирования вследствие мобильности UE.
Кроме того, чтобы выполнять технологию двойного нахождения разностей, которая является полезной для того, чтобы исключать начальный ТХ/RX-компонент фазовой ошибки, сервер определения местоположения, возможно, должен иметь точные сведения относительно моментов времени, в которые СРМ выполняются.
Следовательно, СРМ-измерение с М=4 выборками, например, усреднение значений фазы, оцененных за 4 момента времени, может не быть подходящим в СРМ-сообщении.
С этих точек зрения, способы формирования сообщений по измерениям при позиционировании и их связанные процедуры предлагаются следующим образом:
Когда Rx-узел сообщает СРМ вместе с ОРМ (например, DL-RSTD, UL-RTOA или разностью Rx-Tx-времен UE/TRP), М>1 выборок (экземпляров) используются для ОРМ, тогда как N=1 выборка (экземпляр) используется для СРМ.
- Например, UE может сообщать DL-RSTD-измерение, полученное посредством усреднения 4 выборок для различных моментов времени, вместе с СРМ, полученным посредством 1 выборки момента времени.
Например, UE может сообщать измерение разности Rx-Tx-времен, полученное посредством усреднения 4 выборок для различных моментов времени, вместе с СРМ, полученным посредством 1 выборки момента времени.
Например, gNB может сообщать UL-RTOA-измерение, полученное посредством усреднения 4 выборок для различных моментов времени, вместе с СРМ, полученным посредством 1 выборки момента времени.
Например, gNB может сообщать измерение разности Rx-Tx-времен, полученное посредством усреднения 4 выборок для различных моментов времени, вместе с СРМ, полученным посредством 1 выборки момента времени.
Rx-узел может сообщать несколько пар измерений при позиционировании при формировании сообщений по измерениям при позиционировании, и каждая пара измерений при позиционировании включает в себя одно ОРМ и одно ассоциированное СРМ для TRP (или RS-pecypca).
Rx-узел может сообщать несколько пар измерений при позиционировании при формировании сообщений по измерениям при позиционировании, и каждая пара измерений при позиционировании включают в себя одно ОРМ и несколько ассоциированных СРМ для TRP (или RS-pecypca).
Каждое СРМ в паре измерений при позиционировании измеряется в различный момент времени.
Когда Rx-узел сообщает СРМ вместе с ОРМ, временная метка может сообщаться в каждой паре измерений при позиционировании, при этом временная метка представляет момент времени, в который Rx-узел измеряет СРМ.
- Когда пара измерений при позиционировании содержит одно СРМ, одна временная метка для СРМ сообщается.
Когда пара измерений при позиционировании содержит несколько СРМ, временная метка, соответствующая каждому СРМ, может сообщаться.
Чтобы поддерживать предложенные способы, UE может сообщать характеристики, которые поддерживает СРР.
Чтобы поддерживать предложенные способы, UE может сообщать характеристики относительно поддерживаемого размера(ов) М, при этом М является числом выборок, которое может поддерживаться для ОРМ. Чтобы получать большую точность, чем традиционные способы, М>4 может поддерживаться.
Чтобы поддерживать предложенные способы, сервер определения местоположения может конфигурировать значение М для Rx-узла. В этом случае, Rx-узел измеряет ОРМ с использованием М выборочных наблюдений, тогда как Rx-узел измеряет СРМ с использованием одного выборочного наблюдения.
Чтобы поддерживать предложенные способы, сервер определения местоположения может конфигурировать минимальное значение М, которое Rx-узел должен рассматривать как минимум. В этом случае, Rx-узел измеряет ОРМ с использованием М или более выборочных наблюдений, тогда как Rx-узел измеряет СРМ с использованием одного выборочного наблюдения.
Помимо сообщения с характеристиками, UE может запрашивать предпочтительное значение М на сервер определения местоположения через вспомогательные данные.
Помимо конфигурации, сервер определения местоположения может предоставлять рекомендации по значению М в gNB/UE через вспомогательные данные.
Если М определяется посредством Rx-узла, то Rx-узел, возможно, должен сообщать значение М, которое используется для измерения в сообщении.
Предложенный способ может повышать производительность в отношении СРР-точности.
Предложенный способ может быть преимущественным, когда BW-размер для опорного сигнала позиционирования ограничивается. Например, СРР-точность RedCap UE (т.е. максимум в 20 МГц разрешается в FRl-диапазоне) может повышаться, когда предложенный способ применяется.
Фиг. 8 показывает пример предложенных способов.
Фиг. 8(a) показывает пример, когда пары измерений при позиционировании включают в себя одно ОРМ и одно ассоциированное СРМ для TRP (или RS-pecypca). В этом примере, 4 момента времени используются для измерения ОРМ, и один момент времени используется для ассоциированного СРМ. Кроме того, временная метка пары измерений при позиционировании определяется посредством момента времени СРМ.
Фиг. 8(b) показывает пример, когда пары измерений при позиционировании включают в себя одно ОРМ и несколько ассоциированных СРМ для TRP (или RS-pecypca). В этом примере, 4 момента времени используются для измерения ОРМ, и один момент времени используется для каждого ассоциированного СРМ. Кроме того, моменты времени каждого СРМ используются для того, чтобы определять каждую временную метку.
Фиг. 9 иллюстрирует способ выполнения измерения для позиционирования согласно варианту осуществления настоящего изобретения.
Ссылаясь на фиг. 9, UE может выполнять различные типы измерений для позиционирования (905). Например, UE может выполнять измерение первого типа для позиционирования, включающее в себя измерение фазы несущей (СРМ), и измерение второго типа для позиционирования, которое отличается от измерения первого типа. Предпочтительно, число моментов времени, связанных с измерением второго типа, может быть равно или больше числа моментов времени для измерения первого типа.
UE может сообщать различные типы измерений для позиционирования (910). Например, UE может сообщать измерение первого типа и измерение второго типа.
Предпочтительно, измерение первого типа может выполняться на основе одного момента времени, и измерение второго типа может выполняться на основе нескольких моментов времени.
Предпочтительно, один результат, полученный из измерения второго типа, может быть ассоциирован с множеством результатов, полученных из измерения первого типа. Предпочтительно, множество результатов, полученных из измерения первого типа, могут иметь множество значений временных меток, отличающихся друг от друга (например, фиг. 8(b)).
Предпочтительно, UE может передавать сообщение с характеристиками UE, включающее в себя, по меньшей мере, одно из первой информации относительно того, поддерживает или нет UE измерение первого типа, и второй информации, связанной с числом моментов времени, поддерживаемых посредством UE для измерения второго типа.
Предпочтительно, UE может принимать третью информацию относительно числа моментов времени, связанных с измерением второго типа.
Предпочтительно, третья информация может включать в себя минимальное число моментов времени, связанных с измерением второго типа.
Предпочтительно, UE может передавать предпочитаемое посредством UE число моментов времени, связанных с измерением второго типа.
Предпочтительно, измерение первого типа и измерение второго типа могут включаться в одно сообщение по измерениям.
Предпочтительно, одно сообщение по измерениям может включать в себя число моментов времени, связанных с измерением второго типа.
Предпочтительно, одно сообщение по измерениям может включать в себя информацию временной метки для измерения первого типа.
Предпочтительно, информация временной метки для измерения первого типа может представлять момент времени, в который выполняется измерение первого типа.
Предпочтительно, измерение второго типа может включать в себя, по меньшей мере, одно из измерения на основе разности времен опорных сигналов нисходящей линии связи (DL-RSTD), относительного времени поступления сигналов в восходящей линии связи (UL-RTOA) или измерения разности времени приема-передачи.
Энергонезависимый носитель, сохраняющий инструкции, которые инструктируют процессору осуществлять способ, может
предоставляться согласно другому аспекту настоящего изобретения.
Устройство, осуществляющее способ выполнения измерения для позиционирования, может предоставляться согласно другому аспекту настоящего изобретения.
Фиг. 10 иллюстрирует систему 1 связи, которая может применяться к настоящему раскрытию сущности.
Ссылаясь на фиг. 10, система 1 связи, применяемая к настоящему раскрытию сущности, включает в себя беспроводные устройства, BS и сеть. Беспроводное устройство представляет собой устройство, выполняющее связь с использованием технологии радиодоступа (RAT) (например, 5G NR (или новой RAT) либо LTE), при этом оно также называется "устройством
связи/радиоустройством/5С-устройством". Беспроводные устройства могут включать в себя, но не только, робот 100а, транспортные средства 100b-1 и 100b-2, устройство 100с в стиле расширенной реальности (XR), карманное устройство 100d, бытовой прибор 100е, IoT-устройство 100f и устройство/сервер 400 с поддержкой искусственного интеллекта (AI). Например, транспортные средства могут включать в себя транспортное средство, имеющее функцию беспроводной связи, транспортное средство с поддержкой автономного вождения и транспортное средство, допускающее связь между транспортными средствами (V2V). В данном документе, транспортные средства могут включать в себя беспилотный летательный аппарат (UAV) (например, беспилотный аппарат). XR-устройство может включать в себя устройство в стиле дополненной реальности (AR)/виртуальной реальности (VR)/смешанной реальности (MR) и может реализовываться в форме наголовного устройства (HMD), дисплея на лобовом стекле (HUD), смонтированного в транспортном средстве, телевизионного приемника (телевизора), смартфона, компьютера, носимого устройства, бытового прибора, системы цифровых информационных табло, транспортного средства, робота и т.д. Карманное устройство может включать в себя смартфон, интеллектуальную панель, носимое устройство (например, интеллектуальные часы или интеллектуальные очки) и компьютер (например, переносной компьютер). Бытовой прибор может включать в себя ТВ, холодильник, стиральную машину и т.д. IoT-устройство может включать в себя датчик, интеллектуальный счетчик и т.д. Например, BS и сеть могут реализовываться как беспроводные устройства, и конкретное беспроводное устройство 200а может работать в качестве BS/сетевого узла для других беспроводных устройств.
Беспроводные устройства 100а-100f могут соединяться с сетью 300 через BS 200. AI-технология может применяться к беспроводным устройствам 100а-100f, и беспроводные устройства 100а-100f могут соединяться с А1-сервером 400 через сеть 300. Сеть 300 может быть сконфигурирована с использованием 3G-сети, 4G-(например, LTE-) сети или 5G-(например, NR-) сети. Хотя беспроводные устройства 100а-100f могут обмениваться данными между собой через BS 200/сеть 300, беспроводные устройства 100а-100f могут выполнять прямую связь (например, связь в боковой линии связи) друг с другом без вмешательства BS/сети. Например, транспортные средства 100b-1 и 100b-2 могут выполнять прямую связь (например, связь У2У/между транспортным средством и всем чем угодно (V2X)). IoT-устройство (например, датчик) может выполнять прямую связь с другими IoT-устройствами (например, датчиками) или другими беспроводными устройствами 100а-100f.
Беспроводная связь/соединения 150а, 150b и 150 с может устанавливаться между беспроводными устройствами 100а в 100f/BS 200 и между BS 200. В данном документе, беспроводная связь/соединения может устанавливаться через различные RAT (например, 5G NR), к примеру, UL/DL-связь 150а, связь 150b в боковой линии связи (или, 2Б-связь) либо связь между BS (например, ретрансляция или технология интеграции каналов доступа и обратных транзитных соединений (IAB)). Беспроводные сигналы могут передаваться и приниматься между беспроводными устройствами, между беспроводными устройствами и BS и между BS через беспроводную связь/соединения 150а, 150b и 150 с. Например, сигналы могут передаваться и приниматься по различным физическим каналам через беспроводную связь/соединения 150а, 150b и 150с. С этой целью, по меньшей мере, часть различных процессов конфигурирования конфигурационной информации, различных процессов обработки сигналов (например, канальное кодирование/декодирование, модуляция/демодуляция и преобразование/обратное преобразование ресурсов) и процессов выделения ресурсов, для передачи/приема беспроводных сигналов, может выполняться на основе различных предложений настоящего изобретения.
Фиг. 11 иллюстрирует беспроводные устройства, применимые к настоящему раскрытию сущности.
Ссылаясь на фиг. 11, первое беспроводное устройство 100 и второе беспроводное устройство 200 могут передавать беспроводные сигналы через множество RAT (например, LTE и NR). {Первое беспроводное устройство 100 и второе беспроводное устройство 200} может соответствовать {беспроводное устройство 100х и BS 200} и/или {беспроводное устройство 100х и беспроводное устройство 100х} по фиг. 10.
Первое беспроводное устройство 100 может включать в себя один или более процессоров 102 и одно или более запоминающих устройств 104 и дополнительно включать в себя одно или более приемо-передающих устройств 106 и/или одну или более антенн 108. Процессор(ы) 102 может управлять запоминающим устройством(ами) 104 и/или приемо-передающим устройством(ами) 106 и может быть выполнен с возможностью реализовывать описания, функции, процедуры, предложения, способы и/или блок-схемы последовательности операций способа, раскрытые в этом документе. Например, процессор(ы) 102 может обрабатывать информацию в запоминающем устройстве(ах) 104, чтобы формировать первую информацию/сигналы, и затем передавать беспроводные сигналы, включающие в себя первую информацию/сигналы, через приемопередающее устройство(а) 106. Процессор(ы) 102 может принимать беспроводные сигналы, включающие в себя вторую информацию/сигналы, через приемо-передающее устройство (а) 106 и затем сохранять информацию, полученную посредством обработки второй информации/сигналов, в запоминающем устройстве(ах) 104. Запоминающее устройство(а) 104 может соединяться с процессором(ами) 102 и может сохранять различные фрагменты информации, связанные с операциями процессора(ов) 102. Например, запоминающее устройство(а) 104 может сохранять программный код, включающий в себя инструкции для выполнения всех или части процессов, управляемых посредством процессора(ов) 102, либо для выполнения описаний, функций, процедур, предложений, способов и/или блок-схем последовательности операций способа, раскрытых в этом документе. Процессоры 102 и запоминающее устройство(а) 104 могут составлять часть модема/схемы/микросхемы связи, спроектированного с возможностью реализовывать RAT (например, LTE или NR). Приемо-передающее устройство (а) 106 может соединяться с процессорами 102 и передавать и/или принимать беспроводные сигналы через одну или более антенн 108. Каждое приемо-передающее устройство(а) 106 может включать в себя передающее устройство и/или приемное устройство. Приемопередающее устройство(а) 106 может взаимозаменяемо использоваться с радиочастотным (RF) модулем(ями). В настоящем раскрытии сущности, беспроводное устройство может представлять собой модем/схему/микросхему связи.
Второе беспроводное устройство 200 может включать в себя один или более процессоров 202 и одно или более запоминающих устройств 204 и дополнительно включать в себя одно или более приемо-передающих устройств 206 и/или одну или более антенн 208. Процессоры 202 могут управлять запоминающим устройством(ами) 204 и/или приемо-передающим устройством(ами) 206 и могут быть выполнены с возможностью реализовывать описания, функции, процедуры, предложения, способы и/или блок-схемы последовательности операций способа, раскрытые в этом документе. Например, процессоры 202 могут обрабатывать информацию в запоминающем устройстве(ах) 204, чтобы формировать третью информацию/сигналы, и затем передавать беспроводные сигналы, включающие в себя третью информацию/сигналы, через приемопередающее устройство(а) 206. Процессоры 202 могут принимать беспроводные сигналы, включающие в себя четвертую информацию/сигналы, через приемо-передающее устройство(а) 106 и затем сохранять информацию, полученную посредством обработки четвертой информации/сигналов, в запоминающем устройстве(ах) 204. Запоминающее устройство(а) 204 может соединяться с процессорами 202 и сохранять различные фрагменты информации, связанные с операциями процессоров 202. Например, запоминающее устройство(а) 204 может сохранять программный код, включающий в себя инструкции для выполнения всех или части процессов, управляемых посредством процессоров 202, либо для выполнения описаний, функций, процедур, предложений, способов и/или блок-схем последовательности операций способа, раскрытых в этом документе. Процессоры 202 и запоминающее устройство(а) 204 могут составлять часть модема/схемы/микросхемы связи, спроектированного с возможностью реализовывать RAT (например, LTE или NR). Приемо-передающее устройство(а) 206 может соединяться с процессорами 202 и передавать и/или принимать беспроводные сигналы через одну или более антенн 208. Каждое приемо-передающее устройство (а) 206 может включать в себя передающее устройство и/или приемное устройство. Приемопередающее устройство(а) 206 может взаимозаменяемо использоваться с RF-модулем(ями). В настоящем раскрытии сущности, беспроводное устройство может представлять собой модем/схему/микросхему связи.
Ниже подробнее описываются аппаратные элементы беспроводных устройств 100 и 200. Один или более протокольных уровней могут реализовываться посредством, но не только, одного или более процессоров 102 и 202. Например, один или более процессоров 102 и 202 могут реализовывать один или более уровней (например, функциональных уровней, таких как физический уровень (PHY), уровень управления доступом к среде (MAC), уровень управления радиосвязью (RLC), уровень протокола конвергенции пакетных данных (PDCP), RRC-уровень и уровень протокола адаптации данных по услугам (SDAP)). Один или более процессоров 102 и 202 могут формировать одну или более протокольных единиц данных (PDU) и/или одну или одну или более служебных единиц данных (SDU) согласно описаниям, функциям, процедурам, предложениям, способам и/или блок-схемам последовательности операций способа, раскрытым в этом документе. Один или более процессоров 102 и 202 могут формировать сообщения, управляющую информацию, данные или информацию согласно описаниям, функциям, процедурам, предложениям, способам и/или блок-схемам последовательности операций способа, раскрытым в этом документе, и предоставлять сообщения, управляющую информацию, данные или информацию в одно или более приемо-передающих устройств 106 и 206. Один или более процессоров 102 и 202 могут формировать сигналы (например, сигналы в полосе модулирующих частот), включающие в себя PDU, SDU, сообщения, управляющую информацию, данные или информацию, согласно описаниям, функциям, процедурам, предложениям, способам и/или блок-схемам последовательности операций способа, раскрытым в этом документе, и предоставлять сформированные сигналы в одно или более приемо-передающих устройств 106 и 206. Один или более процессоров 102 и 202 могут принимать сигналы (например, сигналы в полосе модулирующих частот) из одного или более приемопередающих устройств 106 и 206 и получать PDU, SDU, сообщения, управляющую информацию, данные или информацию согласно описаниям, функциям, процедурам, предложениям, способам и/или блок-схемам последовательности операций способа, раскрытым в этом документе.
Один или более процессоров 102 и 202 могут называться "контроллерами", "микроконтроллерами", "микропроцессорами" или "микрокомпьютерами". Один или более процессоров 102 и 202 могут реализовываться посредством аппаратных средств, микропрограммного обеспечения, программного обеспечения либо комбинации вышеозначенного. Например, одна или более специализированных интегральных схем (ASIC), один или более процессоров цифровых сигналов (DSP), одно или более устройств обработки цифровых сигналов (DSPD), одно или более программируемых логических устройств (PLD) или одна или более программируемых пользователем вентильных матриц (FPGA) могут включаться в один или более процессоров 102 и 202. Описания, функции, процедуры, предложения, способы и/или блок-схемы последовательности операций способа, раскрытые в этом документе, могут реализовываться с использованием микропрограммного обеспечения или программного обеспечения, и микропрограммное обеспечение или программное обеспечение может быть выполнено с возможностью включать в себя модули, процедуры или функции. Микропрограммное обеспечение или программное обеспечение, выполненное с возможностью выполнять описания, функции, процедуры, предложения, способы и/или блок-схемы последовательности операций способа, раскрытые в этом документе, может включаться в один или более процессоров 102 и 202 либо может сохраняться в одном или более запоминающих устройств 104 и 204 и выполняться посредством одного или более процессоров 102 и 202. Описания, функции, процедуры, предложения, способы и/или блок-схемы последовательности операций способа, раскрытые в этом документе, могут реализовываться с использованием микропрограммного обеспечения или программного обеспечения в форме кода, инструкции и/или набора инструкций.
Одно или более запоминающих устройств 104 и 204 могут соединяться с одним или более процессоров 102 и 202 и сохранять различные типы данных, сигналов, сообщений, информации, программ, кода, инструкций и/или команд. Одно или более запоминающих устройств 104 и 204 могут быть выполнены с возможностью включать в себя постоянные запоминающие устройства (ROM), оперативные запоминающие устройства (RAM), электрически стираемые программируемые постоянные запоминающие устройства (EPROM), флэш-память, жесткие диски, регистры, кэш-память, машиночитаемые носители хранения данных и/или комбинации вышеозначенного. Одно или более запоминающих устройств 104 и 204 могут быть расположены внутри и/или снаружи относительно одного или более процессоров 102 и 202. Одно или более запоминающих устройств 104 и 204 могут соединяться с одним или более процессоров 102 и 202 через различные технологии, к примеру, через проводное или беспроводное соединение.
Одно или более приемо-передающих устройств 106 и 206 могут передавать пользовательские данные, управляющую информацию и/или беспроводные сигналы/каналы, упомянутые в способах и/или на блок-схемах последовательности операций способа этого документа, в одно или более других устройств. Одно или более приемопередающих устройств 106 и 206 могут принимать пользовательские данные, управляющую информацию и/или беспроводные сигналы/каналы, упомянутые в описаниях, функциях, процедурах, предложениях, способах и/или на блок-схемах последовательности операций способа, раскрытых в этом документе, из одного или более других устройств. Например, одно или более приемопередающих устройств 106 и 206 могут соединяться с одним или более процессоров 102 и 202 и передавать и принимать беспроводные сигналы. Например, один или более процессоров 102 и 202 могут выполнять управление таким образом, что одно или более приемо-передающих устройств 106 и 206 могут передавать пользовательские данные, управляющую информацию или беспроводные сигналы в одно или более других устройств. Один или более процессоров 102 и 202 могут выполнять управление таким образом, что одно или более приемо-передающих устройств 106 и 206 могут принимать пользовательские данные, управляющую информацию или беспроводные сигналы из одного или более других устройств. Одно или более приемо-передающих устройств 106 и 206 могут соединяться с одной или более антенн 108 и 208, и одно или более приемо-передающих устройств 106 и 206 могут быть выполнены с возможностью передавать и принимать пользовательские данные, управляющую информацию и/или беспроводные сигналы/каналы, упомянутые в описаниях, функциях, процедурах, предложениях, способах и/или на блок-схемах последовательности операций способа, раскрытых в этом документе, через одну или более антенн 108 и 208. В этом документе, одна или более антенн могут представлять собой множество физических антенн или множество логических антенн (например, антенных портов). Одно или более приемо-передающих устройств 106 и 206 могут преобразовывать принимаемые беспроводные сигналы/каналы из сигналов в полосе RF-частот в сигналы в полосе модулирующих частот, чтобы обрабатывать принимаемые пользовательские данные, управляющую информацию и беспроводные сигналы/каналы с использованием одного или более процессоров 102 и 202. Одно или более приемопередающих устройств 106 и 206 могут преобразовывать пользовательские данные, управляющую информацию и беспроводные сигналы/каналы, обработанные с использованием одного или более процессоров 102 и 202, из сигналов в полосе модулирующих частот в сигналы в полосе RF-частот. С этой целью, одно или более приемо-передающих устройств 106 и 206 могут включать в себя (аналоговые) осцилляторы и/или фильтры.
Варианты осуществления настоящего изобретения, описанные выше, представляют собой комбинации элементов и признаков настоящего изобретения. Элементы или признаки могут считаться избирательными, если не указано иное. Каждый элемент или признак может осуществляться на практике без комбинирования с другими элементами или признаками. Дополнительно, вариант осуществления настоящего изобретения может конструироваться посредством комбинирования частей элементов и/или признаков. Порядок операций, описанных в вариантах осуществления настоящего изобретения, может перекомпоновываться. Некоторые структуры любого варианта осуществления могут быть включены в другой вариант осуществления и могут заменяться соответствующими структурами другого варианта осуществления. Специалистам в данной области техники должно быть очевидным, что пункты формулы изобретения, которые не приводятся явно в сочетании друг с другом в прилагаемой формуле изобретения, могут представляться в комбинации в качестве варианта осуществления настоящего изобретения либо включаться в качестве нового пункта в силу последующего изменения после того, как подана заявка.
Варианты осуществления настоящего изобретения описываются выше, с акцентированием внимания на взаимосвязи передачи и приема сигналов между UE и BS. Взаимосвязь передачи и приема сигналов расширяется на передачу и прием сигналов между UE и ретранслятором либо между BS и ретранслятором идентичным или аналогичным способом. Конкретная операция, описанная как выполняемая посредством BS, может выполняться посредством верхнего узла BS. А именно, очевидно, что в сети, состоящей из множества сетевых узлов, включающих в себя BS, различные операции, выполняемые для связи с UE, могут выполняться посредством BS или сетевых узлов, отличных от BS. Термин "BS" может заменяться термином "стационарная станция", "узел В", "усовершенствованный узел В" ("усовершенствованный узел В" или "eNB"), "точка доступа" и т.д. Дополнительно, термин "UE" может заменяться термином "терминал", "мобильная станция (MS)", "мобильная абонентская станция (MSS)" и т.д.
Специалисты в данной области техники должны принимать во внимание, что настоящее изобретение может осуществляться конкретными способами, отличными от способов, изложенных в данном документе, без отступления от сущности и важнейших характеристик настоящего изобретения. В силу этого вышеприведенные варианты осуществления должны рассматриваться во всех аспектах как иллюстративные, а не ограничительные. Объем изобретения должен определяться посредством прилагаемой формулы изобретения и ее допустимых эквивалентов, а не посредством вышеприведенного описания, и все изменения, попадающие в рамки смысла и в диапазон эквивалентности прилагаемой формулы изобретения, должны включаться в него.
Промышленная применимость
Настоящее изобретение может использоваться в UE, BS или других устройствах в системе беспроводной связи.








Изобретение относится к области беспроводной связи. Техническим результатом является повышение точности и эффективности позиционирования в системе беспроводной связи. Упомянутый технический результат достигается тем, что осуществляют выполнение измерения первого типа для позиционирования, включающего в себя измерение фазы несущей (СРМ); выполнение измерения второго типа для позиционирования, которое отличается от измерения первого типа; и формирование сообщений по измерению первого типа и измерению второго типа, при этом число моментов времени, связанных с измерением второго типа, может быть равно или больше числа моментов времени для измерения первого типа. 3 н. и 12 з.п. ф-лы, 11 ил.
1. Способ выполнения измерения для позиционирования посредством пользовательского оборудования (UE) в системе беспроводной связи, при этом способ содержит этапы, на которых:
выполняют измерение первого типа для позиционирования, включающее в себя измерение фазы несущей (СРМ);
выполняют измерение второго типа для позиционирования, которое отличается от измерения первого типа; и
формируют сообщения по измерению первого типа и измерению второго типа,
при этом число моментов времени, связанных с измерением второго типа, равно или больше числа моментов времени для измерения первого типа.
2. Способ по п. 1, в котором один результат, полученный из измерения второго типа, ассоциирован с множеством результатов, полученных из измерения первого типа, и
при этом множество результатов, полученных из измерения первого типа, имеют множество значений временных меток, отличающихся друг от друга.
3. Способ по п. 1, в котором измерение первого типа выполняется однократно для одного момента времени, и измерение второго типа выполняется многократно для нескольких моментов времени.
4. Способ по п. 1, дополнительно содержащий этап, на котором:
передают сообщение с характеристиками UE, включающее в себя, по меньшей мере, одно из первой информации относительно того, поддерживает или нет UE измерение первого типа, и второй информации, связанной с числом моментов времени, поддерживаемых посредством UE для измерения второго типа.
5. Способ по п. 1, дополнительно содержащий этап, на котором:
принимают третью информацию относительно числа моментов времени, связанных с измерением второго типа.
6. Способ по п. 5, в котором третья информация включает в себя минимальное число моментов времени, связанных с измерением второго типа.
7. Способ по п. 1, дополнительно содержащий этап, на котором:
передают предпочитаемое посредством UE число моментов времени, связанных с измерением второго типа.
8. Способ по п. 1, в котором измерение первого типа и измерение второго типа сообщаются через одно сообщение по измерениям.
9. Способ по п. 8, в котором одно сообщение по измерениям включает в себя число моментов времени, связанных с измерением второго типа.
10. Способ по п. 8, в котором одно сообщение по измерениям включает в себя информацию временной метки для измерения первого типа.
11. Способ по п. 10, в котором информация временной метки для измерения первого типа представляет момент времени, в который выполняется измерение первого типа.
12. Способ по п. 1, в котором измерение второго типа включает в себя, по меньшей мере, одно из измерения на основе разности времен опорных сигналов нисходящей линии связи (DL-RSTD), относительного времени поступления сигналов в восходящей линии связи (UL-RTOA) или измерения разности времени приема-передачи.
13. Энергонезависимый носитель, хранящий инструкции, которые инструктируют процессору осуществлять способ по п. 1.
14. Устройство для беспроводной связи, причем устройство содержит:
запоминающее устройство, выполненное с возможностью сохранять инструкции; и
процессор, выполненный с возможностью выполнять операции посредством выполнения инструкций,
при этом операции, выполняемые посредством процессора, включают в себя:
выполнение измерения первого типа для позиционирования, включающего в себя измерение фазы несущей (СРМ);
выполнение измерения второго типа для позиционирования, которое отличается от измерения первого типа; и
формирование сообщений по измерению первого типа и измерению второго типа,
при этом число моментов времени, связанных с измерением второго типа, равно или больше числа моментов времени для измерения первого типа.
15. Устройство по п. 14, дополнительно содержащее: приемо-передающее устройство,
при этом устройство представляет собой абонентское пользовательское оборудование (UE), работающее в системе беспроводной связи.
| CN115767415 A, 07.03.2023 | |||
| WO2021258786 A1, 30.12.2021 | |||
| US10746842 B2, 18.08.2020 | |||
| WO2022236202 A1, 10.11.2022 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ С ПОМОЩЬЮ ИЗМЕРЕНИЙ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОТЕХНИЧЕСКИМ СПОСОБОМ | 2003 |
|
RU2381520C2 |
| Способ изготовления фанеры-переклейки | 1921 |
|
SU1993A1 |
