Описание
Изобретение направлено на роботизированную систему взаимодействия, содержащую робот с системой управления роботом с видами работы и режимами работы, оказывающими влияние на соответствующий интерфейс взаимодействия человека с роботом.
Из уровня техники известно, что металлургические и/или прокатные установки оснащаются манипуляторами или роботами, в частности промышленными роботами. Так, например, уже давно существуют манипуляторы для присоединения защитной трубы к промежуточному ковшу или для транспортировки тяжелых кирпичей для футеровки конвертера. Также находят применение полностью автоматические роботы, например, для лакирования катушек или для торкретирования электродуговой печи. Общим для этих применений является то, что соответствующий робот настроен на соответствующую специальную задачу и ориентирован на нее.
Например, из WO 2005/118182 А1 известно, кроме того, использование многофункциональных роботов, которые выполняют более чем одну задачу, причем согласно этому уровню техники роботизированная система выполнена таким образом, что с помощью нее могут осуществляться многие различные действия на разливочной площадке. Роботизированная система, которая содержит многофункциональный робот, который на стенде для технического обслуживания разливочного ковша следит за состоянием основания разливочного ковша, известна из WO 2008/025562 А1.
Известные из уровня техники роботы, в частности многофункциональные роботы, хотя и могут в принципе выполнять различные задачи, их функциональность, однако, как правило, направлена на полностью автоматическое использование.
В случае необходимости, в порядке помощи, человек в рамках своей функции в качестве производственного персонала или рабочего с помощью режима телеманипуляции многофункционального робота может вмешаться в функционирование и функциональность такой системы. Во время функционирования и в рабочем состоянии многофункционального робота рабочее пространство и пространство перемещения робота и человека в любой момент времени должны оставаться разделенными, чтобы робот не нанес ущерба человеку. Полностью автоматические решения требуют, однако, для безупречного функционирования соответствующего робота определенной степени необходимой сенсорной техники или восприятия, ловкости и/или способности принимать решения, чтобы иметь возможность выполнять рабочий процесс. При сложных рабочих процессах подобные системы наталкиваются на ограничения, что касается необходимых для их реализации затрат, системной стабильности и безопасности процесса. Как раз в металлургических установках и установках прокатных станов во время определенных ручных операций часто возникает необходимость принимать квалифицированные и быстрые решения о дальнейшем образе действий на основе наблюдений человеком, то есть работающим в соответствующей рабочей зоне работником или рабочим персоналом. Так при работах по техническому обслуживанию на разливочном ковше должны приниматься решения о том, какие детали должны продолжать применяться, а какие должны быть заменены. Это обуславливает не только распознавание соответствующего состояния, но и требует определенной меры способности принятия решения, чтобы принимать соответствующее правильное решение. В известных до сих пор решениях предшествующего уровня техники в подобном случае промышленные роботы выключаются или стопорятся, и рабочий входит в пространство перемещения, окруженное защитным ограждением и рабочую зону робота, чтобы выполнить необходимую проверку и принять решение. В случае рабочих процессов, для которых характерна частая смена рабочих действий и действия по наблюдению и проверке, такое решение является неудовлетворительным, так как робот должен часто останавливаться. Также определенные простые ручные задания оказываются технически несоразмерно затратными или характеризуются неблагоприятным соотношением затрат к полезному эффекту, потому что для замены простого ручного действия человека роботизированная система должна быть оснащена сенсорным средствами высокой сложности. Так простое удаление маленького предохранительного элемента, такого как шплинт, для человека является простым ручным действием, поскольку он визуально воспринимает положение шплинта и может легко вытащить его рукой. Чтобы эту задачу выполнить роботом, последний должен быть оснащен сложными сенсорными средствами, которые позволяют определить положение элемента, в данном случае шплинта. Только после этого робот может удалить шплинт. Если это должно осуществляться, например, посредством телеманипулятора, то к тому же это действие является затратным, ненадежным и медленным.
Возможность уменьшить эту проблему состоит в том, чтобы соответствующее рабочее место и соответствующие рабочие средства ориентировать на автоматизацию. Так в WO 2008/025562 А1 предложена конкретная реализация для механизма шиберного затвора разливочного ковша для стали, который может заменяться с помощью робота. Недостатком в этой системе является то, что затраты на осуществление такой адаптации обуславливают значительные расходы и, тем самым, экономичность оснащенной этими средствами установки, ввиду связанных с этим инвестиционных затрат, уменьшается. Так в примере, описанном в WO 2008/025562 А1, каждый разливочный ковш должен оснащаться соответствующей системой шиберного затвора и относящимся к ней креплением.
Другой существенный недостаток известных систем состоит в том, что при их применении, при необходимости, доступность соответствующей установки ухудшается. В то время как для манипуляторов, ввиду ответственного обслуживания человеком-оператором, то есть соответствующим обслуживающим персоналом, безопасность гарантируется, в случае обычных полностью автоматизированных промышленных роботов, ввиду законодательно установленных норм (в Европе, например, директива 2006/42/EG), необходимо предусмотреть отделение рабочей зоны и зоны перемещения робота от места нахождения человека, то есть обслуживающего персонала.
Наконец, из WO 2007/057061 А1 известно, что действующий рабочий робот из собственно рабочей зоны выводится, так что затем обеспечивается возможность доступа в рабочую зону для обслуживающего персонала. Однако выведение робота требует определенного промежутка времени, так что в моменты опасности проходит ценное время, прежде чем обслуживающий персонал сможет войти в опасную зону и там противодействовать опасной ситуации.
В основе изобретения лежит задача создать решение, которое обеспечивает гибкую адаптацию робота или роботизированной системы к различным степеням взаимодействия человека с роботом.
Эта задача в соответствии с изобретением решается роботизированной системой взаимодействия, содержащей робот с системой управления роботом с видами работы и режимами работы, воздействующими на соответствующий интерфейс взаимодействия человека с роботом, которые выполнены адаптированными и/или адаптируемыми к различным степеням автоматизации робота и/или различным позиционированиям по времени и/или по месту партнеров по взаимодействию - человека и робота в рабочем пространстве.
С помощью изобретения, таким образом, создается гибкое решение для выполнения роботизированной системы, ее зоны перемещения и работы, а также ее способа работы, основанное на разделении труда при выполнении задания с разделением задания по времени и пространству во взаимодействии с человеческим обслуживающим персоналом, так что многие задания могут осуществляться быстро и эффективно, при этом не ограничиваясь полностью автоматизированным или дистанционно управляемым выполнением роботизированной системы. Таким образом, в соответствии с изобретением достигается то, что возможности современных промышленных роботов могут комбинироваться с человеческим восприятием и способностью принятия решения. Для этого, в особенности в металлургических или прокатных установках, каждому рабочему месту сопоставлена роботизированная система, которая может гибко адаптироваться к множеству различных действий в рамках соответствующего рабочего окружения. Гибкость роботизированной системы достигается за счет того, что система имеет различные режимы работы, которые охватывают различные формы взаимодействия между человеком-оператором или обслуживающим персоналом и роботизированной системой, а также расширенные виды функционирования. Роботизированное управление расширяется в соответствии с этими режимами функционирования. Для этого для роботизированной системы вводятся различные формы взаимодействия, которые между партнерами по взаимодействию - роботом и человеком как операторами или обслуживающим персоналом - обеспечивают возможность выполнения заданий с разделением труда при различном выражении разделения заданий по времени и по пространству. При этом различные формы взаимодействия определяют уровни разделения по времени и по месту между осуществляющими интерактивную связь партнерами - роботом и работником - в пределах пространства перемещения или функционирования роботизированной системы. Например, возможна непосредственная совместная работа работников и роботов, которые совместно выполняют действия над одной и той же деталью без разделения между ними по времени или пространству, подобная форма взаимодействия обычно обозначается как сотрудничество. Эта форма взаимодействия включает в себя также процесс непосредственного наблюдения, при котором робот самостоятельно выполняет работу и при этом наблюдается человеком, который находится в пространстве перемещения робота. Другим взаимодействием было бы самостоятельное функционирование робота, в то время как он дистанционно управляется человеком с безопасного расстояния. При этом имеет место разделение по месту и времени партнеров по взаимодействию в пространстве функционирования.
Роботизированная система взаимодействия отличается многими видами роботизированного действия, которые предпочтительно, наряду с обычным полностью автоматизированным производством, дополняют роботизированную систему взаимодействия и систему управления роботом новыми и дополнительными видами функционирования, которые допускают более интенсивное взаимодействие с обслуживающим персоналом или работниками.
Такой новый вид функционирования представляет собой режим манипуляции, при котором робот находится в так называемом ручном режиме. В режиме манипуляции робот управляется посредством ручного управления, которое обеспечивает оператору/работнику возможность непосредственного управления осями и/или управления в декартовых координатах рабочим (исполнительным) органом робота. В режиме манипуляции проводится различие между тремя режимами с различной функциональностью, которые различаются соответственно расстоянию между роботом и человеческим обслуживающим персоналом.
В первом режиме робот управляется как направляемый вручную робот. В этом режиме человек-оператор может вести робот непосредственно вручную. Это реализуется посредством сенсоров усилия-момента, которые размещены на роботе и измеряют давление, которое прикладывается соответствующим оператором к роботу, предпочтительно исполнительному органу робота или подвижной части робота.
Второй режим состоит в направлении робота посредством ручного управления. В этом режиме соответствующий работник стоит рядом с роботом, в частности внутри пространства перемещения робота, и приводит в действие робот через управление, которое выполнено в виде пульта управления в форме рукоятки управления или комбинации рукояток управления или как пространственная мышь (для манипулирования трехмерными объектами).
Следующий режим относится к телеуправляемому направлению робота посредством ручного управления, при котором оператор/работник находится вне пространства перемещения и функционирования робота, например в пункте управления, и наблюдает за роботом издали или с помощью камеры, при этом затем ручное управление может выполняться, как во втором описанном выше режиме. В режиме манипуляции для оператора/работника в распоряжение предоставлены возможности управления осями и/или непосредственное управление захватом/инструментом соответствующего робота.
Другим видом работы робота является полуавтоматический режим, при котором робот автоматически выполняет последовательности программы робота. В полуавтоматическом режиме работы робот предоставляет оператору ряд программируемых последовательностей, которые соответствуют отдельным частичным шагам выполнения соответствующего рабочего задания, которые сопоставлены роботу и роботизированной системе взаимодействия. Оператор может при этом выбирать отдельные рабочие последовательности и их произвольно останавливать или запускать. В этом виде работы отдельные рабочие шаги выполняются по существу попеременно между роботом и человеком/оператором. Так, например, работник открывает крышку, отходит в сторону и затем запускает короткую последовательность управления роботом, в которой последний устанавливает в отверстие некий тяжелый предмет. По окончании автоматически выполненной последовательности, человек может вновь закрыть крышку. Запуск, остановка или выбор последовательности могут происходить с помощью удобного в обслуживании прибора ввода, голосового управления или воспринимаемыми сенсорами жестами работника/оператора. Полуавтоматический режим работы также обеспечивает возможность вмешательства оператора в полностью автоматизированную программную последовательность, если она по непредусмотренным причинам сталкивается с проблемами или если в рабочем процессе в автоматическом режиме выявляются необычные обстоятельства. В этом случае оператор может прервать полностью автоматизированный режим и переходит на полуавтоматический режим, который позволяет ему повторить отдельные последовательности или перейти к другому рабочему шагу в программе. Функциями в полуавтоматическом режиме являются, например, «пауза», «отступить», «захват из/к», «свободное действие» (=возвратиться в автоматический режим) или «перейти на рабочий шаг вперед/назад». Также в полуавтоматическом режиме в любой момент можно перейти в режим манипуляции.
В варианте выполнения изобретение предусматривает, что виды работы и/или режимы работы являются подключаемыми и отключаемыми, и робот может адаптироваться посредством видов работы и/или режимов работы к различным функциональностям и/или видам функционирования.
Во всех видах работы за счет соответствующего выполнения роботизированной системы взаимодействия гарантируется, что в каждый момент времени обеспечивается необходимая безопасность работника/оператора. Роботизированная система, а также относящаяся и сопоставленная с ней рабочая зона выполнены таким образом, что различные режимы работы, как, например, режим телеманипуляции, режим совместной работы или полностью автоматизированный режим, без затратного переоснащения или модернизации, в особенности робота, могут быть реализованы с любыми переходами.
Также выполнение характеризуется тем, что сохраняется доступность оснащенной соответствующей изобретению роботизированной системой взаимодействия металлургической или прокатной установки, и запасные выходы, в случае внезапных и опасных происшествий, не заперты решетками. Это достигается, прежде всего, тем, что роботизированная система взаимодействия большей частью может быть выполнена без разделительных защитных сооружений при использовании роботизированной системы взаимодействия, соответствующей изобретению, так что никакие преграждающие или разделяющие решетки не загораживают путь, если обслуживающему персоналу/работнику необходимо войти в рабочее пространство или рабочую зону робота. Безопасность при эксплуатации машин, в случае оснащенной соответствующей изобретению роботизированной системой взаимодействия металлургической или прокатной установки, вместо разделительных защитных сооружений вышеописанного типа, реализуется с помощью сенсорного контроля рабочей зоны и использования надежного управления и/или сенсорной системы обеспечения безопасности.
Вышеописанная гибкая и/или универсальная роботизированная система взаимодействия предпочтительно состоит по меньшей мере из таких компонентов, как робот, сенсорная система безопасности, надежное управление, интерфейс взаимодействия человека с роботом, который может быть выполнен в форме ручного управления или голосового управления.
Робот, применяемый в этой роботизированной системе взаимодействия, предпочтительно представляет собой универсальный, предпочтительно свободно программируемый промышленный робот. Разумеется, роботизированная система взаимодействия может также содержать более одного робота, например два робота, взаимодействующих как рабочий робот и робот-помощник. Предпочтительно робот(ы) представляет(ют) собой автоматический манипулятор, подвижный относительно шести осей с системой смены для присоединения различных инструментов, захватов или измерительных приборов. Предпочтительно робот(ы) должен(ны) быть выполнен(ы) для использования в экстремальных средах, то есть в высокотемпературной и/или опасной зоне металлургических или прокатных установок. Такое оснащение в настоящее время является обычным и поставляется под маркой «литейное оборудование». При этом захваты и инструменты должны, разумеется, быть выполнены соответствующим образом.
Поэтому изобретение в своем выполнении характеризуется тем, что роботизированная система взаимодействия размещается в металлургической или прокатной установке и там соотнесена с рабочим местом или рабочей зоной.
В другом выполнении изобретение, наконец, предусматривает, что роботизированная система взаимодействия содержит сенсорную систему безопасности, которая включает в себя сенсор или комбинацию сенсоров и которая детектирует присутствие людей в зоне безопасности, соответствующей рабочей зоне робота, и/или во входной зоне и/или зоне детектирования.
Сенсорная система безопасности предпочтительно состоит из комбинации различных сенсоров, которые пригодны для распознавания присутствия людей. Сенсорная система при этом выполнена таким образом, что присутствие людей, например, вход в рабочую зону, распознает с некоторой мерой надежности, так что вся система удовлетворяет требованиям законодательных предписаний и директив, как, например, директива по эксплуатации машин 2006/42/EG.
Чтобы достичь этого сенсорная система безопасности содержит отдельные сенсоры, как правило, однако, комбинацию сенсоров, причем различные типы сенсоров могут иметься многократно и также с избыточностью. Для использования в качестве сенсоров в сенсорной системе безопасности пригодны, например, лазерные сканеры, световые завесы, световые барьеры, камеры с распознаванием глубины, инфракрасные камеры, ультразвуковые сенсоры, входные коврики, маркеры радиочастотной идентификации (RFID), сканеры или сенсоры усилия-момента. Также дверные контакты или выключатели, которые позволяют работнику показать роботизированной системе взаимодействия или сенсорной системе безопасности, что произошел вход в рабочую область, являются элементами, пригодными для использования в сенсорной системе безопасности. Элементы сенсорной системы безопасности, как, например, применяемые сенсоры, выбираются в соответствии с тем, что они соответствуют условиям окружающей среды использования в металлургических или прокатных установках и, несмотря на имеющиеся там высокую запыленность и термические нагрузки, способны надежным образом работать. При этом при выполнении сенсорной системы безопасности учитывается вытекающая из условий рабочей среды пониженная надежность и меньший срок службы, как это может иметь место в случае оптических сенсоров в зоне использования с большим содержанием пыли. Другая задача сенсорной системы безопасности состоит в контроле соответствующего рабочего места или рабочей зоны по отношению к опасным состояниям, в частности состояниям установки, которые не обязательно проистекают непосредственно и главным образом из перемещений и действий робота, но и вытекают из состояния установки или условий на рабочем месте. Так, например, предусмотрены сенсоры, определяющие температуру, которые пригодны не только для того, чтобы воспринимать присутствие людей, но и также в состоянии распознавать горячие поверхности или жидкую сталь, так что при сбоях производства или отказе производственного оборудования может распознаваться опасность. Система с помощью сообщений о потенциальных местах опасности повышает безопасность обслуживающего персонала и работников в соответствующей рабочей зоне. Кроме того, в сенсорную систему безопасности могут встраиваться сенсоры для определения ядовитых или вредных технологических газов, например окиси углерода, также в смысле сенсорного контроля эргономии и/или безопасности труда. Определенные посредством сенсоров и сенсорной системы безопасности и/или обработанные сигналы затем подаются в систему управления роботом или также соответствующую систему безопасности, которая затем в случае опасности вырабатывает сигнал тревоги и/или, например, останавливает робота или в случае перемещаемого робота выводит его из зоны опасности.
Совершенно особым элементом роботизированной системы взаимодействия является система управления роботом, которая, с одной стороны, обеспечивает различные формы взаимодействия между человеком и роботом, а с другой стороны, гарантирует, что человек не подвергается опасности из-за робота или, в частности, ему не наносится ущерб. Система управления роботом оснащена при этом следующими функциональными признаками и функциональными средствами, которыми она управляет и на которые оказывает влияние: система управления роботом вырабатывает и/или контролирует надежное ограничение скоростей робота (в декартовых координатах и относительно осей);
надежное ограничение области перемещения посредством, например, виртуальных стен, и, таким образом, защитной зоны для робота, которая по отношению к рабочему месту и/или по отношению к рабочей деятельности может изменяться;
надежная остановка функционирования робота в любом положении;
и надежный контроль тормозной платформы.
Другим компонентом роботизированной системы взаимодействия является интерфейс взаимодействия человека с роботом, который обеспечивает возможность различных форм взаимодействия между человеком и машиной/роботом. В случае формы взаимодействия, при которой не имеет места никакое разделения партнеров по взаимодействию по времени или месту, оба партнера по взаимодействию находятся в рабочей и/или защитной зоне робота, интерфейс взаимодействия человека с роботом позволяет работнику осуществлять обслуживание роботизированной системы, прямое наблюдение состояний установки из непосредственной близости, предпочтительно в пределах пространства перемещения робота, и, в случае необходимости, вмешательство в процесс, причем роботизированная система взаимодействия тогда оснащена, в частности, обслуживаемым человеком-оператором согласующим устройством или электромеханическим согласующим переключателем. Под согласующим переключателем здесь понимается переключающее устройство, которое постоянно должно приводиться в действие, чтобы управляющие сигналы для несущих опасность состояний могли стать эффективными. Согласующие устройства или электромагнитные согласующие переключатели могут быть выполнены как универсальное 6D-устройство ввода, например, как так называемая пространственная мышь. Но также возможно выполнить их как встроенный в механическую руку или в рабочий (исполнительный) орган робота сенсор усилия-момента, который обеспечивает интуитивное направление робота при поддержании требуемой безопасности. Также возможно выполнение с встроенным голосовым управлением. Это обеспечивает дополнительное преимущество, заключающееся в том, что соответствующий работник или оператор может свободно перемещаться в рабочем пространстве робота. При всех формах выполнения согласующее устройство является существенной частью управления, как и распознаваемая и воспринимаемая соответствующим оператором или работником визуализация или визуальное представление следующего планируемого рабочего шага, так что последующие по времени перемещения робота не возникают неожиданным образом для работника.
Для того чтобы описанную выше и более детально представленную ниже роботизированную систему взаимодействия согласовать с соответствующим рабочим местом или рабочей зоной, с которой сопоставлен робот, содержащий роботизированную систему взаимодействия, и определить рабочие режимы и виды работы, требуемые для конкретного задания, действуют следующим образом: сначала предпринимается детальный анализ рабочих процессов и отдельных видов деятельности, выполняемых на соответствующем рабочем месте или в соответствующей рабочей зоне. Шаги отдельных видов деятельности, из которых формируются или составляются отдельные виды деятельности или рабочие процессы, затем по отдельности оцениваются, подходят ли они для деятельности, выполняемой роботом, или для деятельности, выполняемой человеком. Так, не вызывающие опасений с точки зрении эргономики или техники безопасности действия соотносятся с человеком, в то время как опасные или тяжелые действия относят к роботу. Кроме того, затратные с точки зрения сенсорных средств и неопасные работы сопоставляются с человеком. Другую группу представляют действия, которые представляют как высокий потенциал по нагрузке или высокую опасность, так и требующие проверки и основанной на этом оценки человеком. В этой группе робот и человек работают тогда в непосредственном взаимодействии в том же самом рабочем пространстве рабочей зоны или рабочего места робота.
Соответствующие сопоставления могут без проблем в соответствующем рабочем режиме, так что многие режимы работы или виды работы, которые охватывают формы взаимодействия и выводимые из них виды работы, записываться в системе управления роботом или во взаимодействующем с ней запоминающем устройстве и отображаться, так что роботизированная система взаимодействия имеет доступ к ним. Реализация отдельных взаимодействий между человеком и роботом в режиме работы или виде работы отображает теперь соответствующий процесс, в котором команда, состоящая из человека и робота, совместно решает поставленную производственную задачу, причем могут выполняться чисто роботизированные действия в отсутствие человека, что позволяет достичь повышенной рабочей скорости робота, так как управление безопасностью тогда не требует учета присутствия обслуживающего персонала в рабочей зоне и/или в защитной зоне робота. Также робот может затем останавливаться, когда в заданный момент времени в течение определенного интервала времени должно выполняться действие с участием обслуживающего персонала или работников.
Кроме того, рабочие режимы выполняются гибким образом так, что для оператора соответствующего робота или роботизированной системы взаимодействия в каждый момент времени является возможным вмешиваться в заданный, запрограммированный рабочий процесс и предпринимать ручные вмешательства, если в каждом отдельном случае по непредвиденным причинам продолжение запрограммированного полностью или частично автоматизированного решения с точки зрения оператора представляется неподходящим.
Кроме того, возможно, подключить роботизированную систему взаимодействия к вышестоящей системе управления процессом, которая сопоставлена с соответствующей металлургической или прокатной установкой, так что текущий рабочий режим соответствующего робота, в частности промышленного робота, рабочее состояние деятельности, выполняемой на соответствующем рабочем месте и в рабочей зоне робота, и/или сенсорно воспринимаемые результаты детектирования, которые вырабатывают сенсоры, расположенные на соответствующем роботе или в окрестности робота, направляются или сообщаются в форме сигналов в вышестоящую систему управления процессом.
В целом, с помощью роботизированной системы взаимодействия создается система, которая обеспечивает возможность универсальным образом использовать робота, а именно, не только для функционирования в одном виде работы или одном режиме работы как «полностью автоматизированном режиме», но и также в видах работы или режимах работы, в которых осуществляется взаимодействие человека/работника/оператора с роботом, причем человек и робот во времени и в пространстве находятся совместно в зоне функционирования и перемещения робота, причем человек и робот во времени друг за другом находятся в той же самой пространственной области зоны функционирования и перемещения робота, или причем робот и человек в раздельных положениях по пространству и, при необходимости, также по времени в смысле присутствия или действия в различное время и при этом во взаимодействии, совместно работают друг с другом для выполнения общего задания. Это отличается от предшествующего уровня техники, согласно которому либо робот запрограммирован для определенных действий, и осуществляется разделение роботизированных действий и человеческих действий в области металлургических или прокатных установок как по времени, так и по месту. В известных металлургических установках согласно предшествующему уровню техники не происходит одновременное действие робота и человека. Как только человек вступает в зону функционирования робота, робот останавливается. Затем человек может выполнять свои действия по проверке и техническому обслуживанию. Затем человек вновь покидает зону функционирования или перемещения робота, прежде чем робот будет снова действовать. В отличие от этого соответствующая изобретению роботизированная система взаимодействия обеспечивает то, что человек и робот без разделения по времени и/или без разделения по месту вступают в функционально-техническое взаимодействие друг с другом. Например, возможно, что оба, то есть человек и робот, в той же зоне функционирования, в особенности, в зоне функционирования робота, выполняют одновременно различные приемы или действия, так что не имеется разделения по времени между роботизированными операциями и человеческими операциями. Кроме этого, также возможно, в данной зоне функционирования или перемещения робота также выполнять взаимодействие таким образом, что, например, человек выполняет первую деятельность, а робот затем получает результат работы и продолжает функционировать. В этом смысле нет никакого разделения по месту между человеческой деятельностью и роботизированной деятельностью. Другая возможность состоит в полном устранении разделения по месту и по времени, что, например, имеет место в том случае, когда в зоне перемещения или функционирования робота человек и робот работают почти рука об руку, то есть человек, например, подает роботу деталь, которую тот захватывает и затем далее обрабатывает. С помощью этой гибкой роботизированной системы взаимодействия является возможным повысить возможности использования роботов в области металлургических и прокатных установок. Это приводит к повышению безопасности работы, улучшению эргономической ситуации для работников/операторов, а также к улучшению качества. Это достигается с помощью роботизированной системы взаимодействия, которая оснащенного ею робота модернизирует в гибкую автоматизированную систему для выполнения различных форм взаимодействия между человеком и роботом, и обеспечивает возможность реализации с разделением труда заданий, выполнений и реализаций с разделением заданий по времени и пространству между человеком и роботом. С помощью роботизированной системы взаимодействия робот оснащается множеством возможных функций, видов работы и режимов работы, так что он тогда сопоставимым образом с так называемым «швейцарским ножом» обладает не только основной функцией проводимых автоматизированных манипулирований или технологических процессов аналогично функции резания ножа, но и, помимо этого, аналогично швейцарскому ножу, включает в себя дополнительные инструменты в форме видов работы или режимов работы. Такая гибкая или универсальная роботизированная система взаимодействия содержит по меньшей мере такие компоненты, как робот, сенсорная система безопасности с функциями распознавания присутствия человека и контроля рабочего места на наличие опасных состояний, систему управления роботом, интерфейс взаимодействия человека с роботом, например, в форме ручного управления или голосового управления. Гибкость роботизированной системы взаимодействия достигается тем, что система имеет различные виды работы и/или режимы работы, которые соответственно отображают и допускают различные виды совместной работы и взаимодействия между человеком-оператором и режимом работы робота, а также включает в себя расширенные виды работы. Различные виды работы и/или режимы работы сохранены либо непосредственно в системе управления роботом или в элементах памяти, взаимодействующих с системой управления роботом.
Для того чтобы выполнить систему особенно гибкой, является возможным разместить робота с возможностью перемещения на путях перемещения, причем эти пути перемещения также могут быть выполнены в форме подкранового пути. Это позволяет увеличить пространство перемещения и связанные с этим возможности робота, оснащенного роботизированной системой взаимодействия.
Это дополнительно поддерживается тем, что с роботом сопоставлены динамически изменяющиеся в зависимости от его постановки задачи защитные зоны или защитные пространства, которые выполняются или могут быть выполнены связанными с рабочим местом робота или связанными с деятельностью робота.
Так как в рамках изобретения предусмотрена совместная работа человека и робота, то есть взаимодействие человека с роботом, то соответствующие промышленные роботы могут быть оснащены, в зависимости от цели использования, с масштабируемой степенью автоматизации. При этом масштабируемость имеет диапазон от робота, который практически полностью управляется человеком, как конечная точка масштабируемой автоматизации, до робота, который воспринимает свои задачи без какого-либо контроля со стороны человека, в качестве другого конца шкалы автоматизации. При этом степень механизации/автоматизации робота повышается с повышением степени автоматизации, причем одновременно снижаются затраты на обслуживание человеком. Ступенями масштабируемой автоматизации являются, например, на нижнем конце, телеробот, который управляется обслуживающим персоналом/оператором как чисто теле- (дистанционно управляемый) манипулятор. Следующим шагом является комбинация телеробота, который выполняет телеоперации, с ручными этапами работы, которые выполняет работник без устройств манипулирования. Следующей ступенью является, например, то, что частично автоматизированный вспомогательный или рабочий робот самостоятельно выполняет частичные задания, и во взаимодействии с ним работник выполняет ручные рабочие шаги. Следующая ступень может тогда состоять из комбинации рабочих шагов, выполняемых телероботом на каждую телеоперацию, с частично автоматизированно выполняемыми роботом рабочими шагами и выполняемыми вручную работником рабочими шагами. При этом робот целесообразно выполнен так, что он может выполняться как (свободно) программируемый промышленный робот для частично автоматизированных процессов, так и в чисто телеманипуляторном режиме как телеробот. Наивысшей ступенью будет тогда полная автоматизация всех видов деятельности, выполняемых на металлургическом производственном оборудовании или на металлургической или прокатной установке, которые, например, до их пор выполнялись работником. При этом тогда также различные роботы работают совместно полностью автоматически, так что вспомогательный или рабочий робот может выполнять рабочую деятельность в комбинации с сервисным роботом.
Также является возможным оснастить соответствующего промышленного робота масштабируемым образом соответствующей требуемой «машинной интеллектуальностью». Соответствующая «машинная интеллектуальность» определяется сенсорными способностями, которыми оснащен соответствующий робот, в особенности промышленный робот. В то время как промышленный робот без сенсорных способностей как «слепой» робот остается ограниченным заданиями, которые используют только силовые и подъемные способности робота, робот с сенсорами и, тем самым, с «машинной интеллектуальностью», при необходимости, может реализовать заметно больше и более сложные рабочие действия. В любом случае увеличение «машинной интеллектуальности» также связано с более сложным управлением, что, однако, сопровождается увеличенным количеством возможных рабочих действий и, тем самым, возможностей использования. Ступенями масштабируемой «машинной интеллектуальности» являются, например, на нижнем конце исключительно управляемые по координатам «слепые» роботы без сенсорной техники. Следующей ступенью мог бы быть промышленный робот, выполненный с простыми сенсорными средствами, в виде, например, светового барьера, за которым следует промышленный робот с простыми сенсорными средствами, воспринимающими внешнее окружение, который находится под частичными контролем и обслуживанием человека-оператора. Следующей ступенью мог бы быть робот с более сложными сенсорными средствами, например системой камер, который в состоянии воспринимать и оценивать внешнее окружение и действовать в зависимости от ситуации. Наивысшей ступенью был бы робот с всеобъемлющими, сложными, превосходящими человека сенсорными средствами, как, например, промышленный робот, оснащенный высокоразрешающими камерами, например камерами теплового изображения, который обрабатывает принимаемые сигналы в соответствующем блоке оценки и управления. В частности, это относится к так называемым автономным роботам или когнитивным роботизированным системам.
Эти оснащенные масштабируемой «машинной интеллектуальностью» и масштабируемой степенью автоматизации промышленные роботы в области металлургических или прокатных установок используются в комбинации друг с другом или в комбинации с ручной человеческой деятельностью таким образом, чтобы удовлетворять основной идее и основному принципу эргономичной и безопасной работы на любом оборудовании металлургического производства.
При этом также может быть предусмотрено, что с каждым роботом соотнесена одна или несколько защитных зон, которые динамически, в зависимости от рабочей деятельности робота или в зависимости от рабочей позиции робота, различаются по величине и проектируются и выполняются варьируемыми. Также эта идея поддерживает основную концепцию эргономичной и безопасной работы в зоне металлургической установки на отдельном металлургическом производственном оборудовании.
Чтобы в рамках взаимодействия человека с роботом иметь возможность передачи видов деятельности или продвижения видов деятельности людьми вне зоны тепловой нагрузки или опасной зоны соответствующей установки, может также быть предусмотрено, что соответствующий промышленный робот размещается с возможностью перемещения в зоне соответствующего металлургического производственного оборудования или металлургической или прокатной установки, так что тем самым рабочая зона промышленного робота может делаться более гибкой и увеличенной, и безопасная передача видов деятельности или деталей и подобного к работнику может обеспечиваться вне зоны тепловой нагрузки или опасной зоны соответствующего металлургического производственного оборудования или соответствующего рабочего места или соответствующей рабочей зоны.
Изобретение далее поясняется более подробно на примере со ссылками на чертежи, на которых показано следующее:
Фиг. 1 - схематичное представление первой формы взаимодействия робота и оператора,
Фиг. 2 - схематичное представление второй формы взаимодействия робота и оператора,
Фиг. 3 - третья форма взаимодействия робота и оператора.
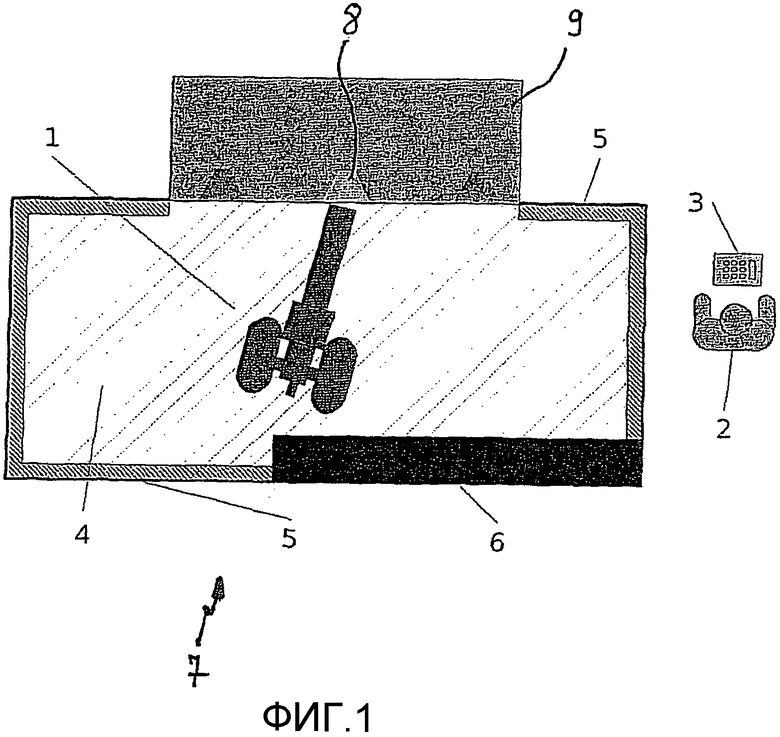
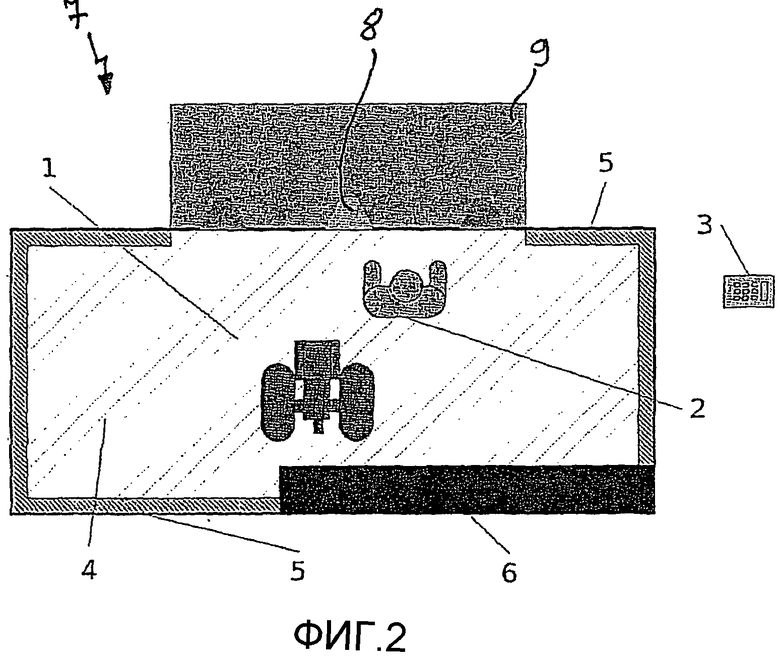
Фиг. 1-3 показывают способ действия роботизированной системы взаимодействия на основе видов деятельности, подлежащих выполнению в зоне ковшевого стенда 7 металлургической установки в рамках проверки и технического обслуживания шиберного затвора 8 на разливочном ковше 9 для стали. При этом фиг. 1 схематично показывает рабочее действие прожигания разливочного канала, фиг. 2 схематично показывает действие открывания корпуса шиберного затвора, и фиг. 3 схематично показывает действие установки новой плиты шиберного затвора.
Выполняемые виды деятельности производятся во взаимодействии человека/работника/оператора 2 и робота 1. Робот 1 оснащен системой управления роботом, которая содержит соответствующий интерфейс взаимодействия человека и робота, которые совместно являются составной частью роботизированной системы взаимодействия, которая включает в себя виды работы и режимы работы, оказывающие воздействие на интерфейс взаимодействия человека и робота. Эти различные виды работы и режимы работы выполнены адаптированными или адаптируемыми с различными степенями автоматизации робота и/или с различными позиционированиями по времени и/или по месту партнеров по взаимодействию - человека 2 и робота 1 в рабочем пространстве.
С роботом 1, кроме того, сопоставлена контролируемая зона 4 безопасности, которая ограничена двумя контролируемыми входными зонами 5 и участком 6 стены, а также подлежащей обработке зоной разливочного ковша 9 для стали. Как зона 4 безопасности, так и контролируемые входные зоны 5 оснащены сенсорами, которые соответственно образуют сенсорную систему безопасности и, в частности, реагируют, когда работник или оператор 2 входит в зону 4 безопасности, через систему управления роботом в зависимости от соответственно выбранного рабочего режима и в зависимости от активного вида работы инициируют соответствующие реакции робота. Последние могут состоять в том, что робот 1 вступает во взаимодействие с входящим работником или оператором 2, что робот 1 замедляет свою рабочую скорость, что робот 1 останавливается и/или что робот 1 возвращается в позицию покоя. Но также возможно запускать посредством сенсорной системы безопасности и другие действия.
Фиг.1 показывает первую форму взаимодействия для взаимодействия человека и робота, при которой имеется разделение по месту и времени обоих компонентов - человека 2 и робота 1, и роботизированная система взаимодействия находится в режиме, соответствующем виду работы полной автоматизации или частичной манипуляции, причем в последнем случае оператор 2 вручную управляет роботом 1 с помощью пульта 3 оператора. В показанном на фиг. 1 действии прожигания разливочного канала робот 1 выполняет это действие прожигания, так как это действие, ввиду связанной с ним потенциальной опасности, назначено роботу 1. Робот 1 прожигает разливочный канал полностью самостоятельно, в отсутствие оператора 2, то есть в то время как оператор 2 находится вне контролируемой зоны 4 безопасности. В исключительных случаях прожигание разливочного канала также возможно посредством телеманипуляции. В этом случае находящийся вне зоны 4 безопасности оператор 2 управляет роботом 1 посредством своего пульта 3 оператора. Так как в этой форме взаимодействия работник/оператор 2 находится вне пространства перемещения и рабочего пространства, и тем самым контролируемой зоны 4 безопасности робота 1, при управлении, в особенности в форме вышеупомянутого безопасного управления или управления безопасностью, можно перемещать робота 1 с полной рабочей скоростью. Это происходит так долго, пока сенсорная система безопасности, контролирующая зону 4 безопасности и/или входную зону 5, или сопоставленные с ней сенсорные средства безопасности устанавливают присутствие людей. Если человек, например работник 2, входит в контролируемую зону 4 или пресекает контролируемую входную зону 5, то роботу 1 остается достаточно времени, чтобы с помощью управления роботом выполнить обусловленную этим установку процесса горения и остановить самого себя или текущий рабочий процесс.
На фиг. 2 показано в качестве второй формы взаимодействия разделение по времени робота 1 и работника/оператора 2, причем разделение по месту отсутствует, так как робот 1 и работник/оператор 2 находятся в контролируемой зоне 4 безопасности. В этом положении робот 1 предпочтительно эксплуатируется в полуавтоматическом режиме. При этом позиционировании проводится рабочий процесс открытия корпуса шиберного затвора. Это рабочая операция не является для оператора 2 ни эргономически трудоемкой, ни опасной, с другой стороны, сенсорные затраты, потребные для оснащения робота 1 таким образом, чтобы он эту рабочую операцию мог выполнять полностью автоматически, были бы, напротив, очень затратными. Поэтому, в соответствии с лежащей в основе роботизированной системы взаимодействия и вышеописанным принципом, для этой рабочей операции выбирается рабочий режим, в котором оператор или работник 2 выполняет эту рабочую операцию, в то время как робот 1 надежно останавливается.
Фиг. 3 показывает в качестве третьей формы взаимодействия совместную по времени и по месту работу робота 1 и оператора 2, так что не имеется разделения ни по месту, ни по времени между роботом 1 и оператором 2. В этой форме взаимодействия в данном примере выполнения видом работы является полуавтоматический или ручной режим работы, посредством которого выполняется вставка новой плиты шиберного затвора в основание разливочного ковша 9 для стали. Так как плита шиберного затвора имеет значительный вес, то этот процесс вставки новой плиты шиберного затвора для человека-оператора 2 с эргономической точки зрения был бы проблематичным. С другой стороны, вставка плиты шиберного затвора в основание разливочного ковша 9 для стали требует точного восприятия локальных условий. Ввиду этих краевых условий, в этом случае посредством роботизированной системы взаимодействия взаимодействие человека с роботом выполняется таким образом, что робот 1 в присутствии работника 2 в его пространстве перемещения транспортирует плиту шиберного затвора в непосредственной близости от разливочного ковша 9 для стали, и затем оператор 2 путем ручного управления с помощью своего пульта 3 оператора управляет роботом 1, так что последний, при управлении оператором 2, плиту шиберного затвора устанавливает до окончания этого вида действия или этого рабочего процесса в корпус шиберного затвора в основании разливочного ковша 9 для стали.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЗЕМЕЛЬНОГО УЧАСТКА, ОБЪЕДИНЯЮЩАЯ РОБОТИЗИРОВАННУЮ САМОХОДНУЮ МАШИНУ | 2014 |
|
RU2628346C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО С ПОДВИЖНОЙ КОНСТРУКЦИЕЙ, В ЧАСТНОСТИ РОБОТ | 2017 |
|
RU2727381C2 |
| СЕНСОРНОЕ ПОКРЫТИЕ ДЛЯ ПРОМЫШЛЕННОГО УСТРОЙСТВА | 2017 |
|
RU2722379C2 |
| Электронная система медицинских осмотров (ЭСМО), способ прохождения осмотра в системе ЭСМО и программно-аппаратный комплекс Терминал в составе системы ЭСМО | 2019 |
|
RU2743088C1 |
| СПОСОБ И СИСТЕМА ЗАХВАТА ОБЪЕКТОВ С ПОМОЩЬЮ РОБОТИЗИРОВАННОГО УСТРОЙСТВА | 2020 |
|
RU2745380C1 |
| СОБЫТИЙНАЯ СИСТЕМА | 2020 |
|
RU2775534C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДЕЗИНФЕКЦИИ ПОМЕЩЕНИЙ | 2020 |
|
RU2755793C1 |
| Смесительно-зарядная машина для роботизированной технологии создания скважинных зарядов с переменной энергетической насыщенностью и способы формирования детонационных систем на их основе | 2019 |
|
RU2789093C2 |
| Система взаимодействия человек-робот на основе смешанной реальности | 2022 |
|
RU2813444C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО С ПОДВИЖНОЙ КОНСТРУКЦИЕЙ, ТАКОЕ КАК РОБОТ | 2018 |
|
RU2763460C2 |
Изобретение относится к роботизированной системе, размещенной в металлургической или прокатной установке и сопоставленной рабочему месту или рабочей зоне работника, содержащей робот с системой управления роботом. Система управления роботом имеет виды работы и режимы работы, обеспечивающие соответствующий интерфейс взаимодействия человека с роботом с различными формами взаимодействия между человеком (2) и роботом (1) и оказывающие влияние на упомянутый интерфейс взаимодействия человека с роботом. Виды работы и режимы работы системы управления роботом выполнены адаптированными и/или адаптируемыми к различным степеням автоматизации робота и/или различным позиционированиям по времени и/или по месту партнеров по взаимодействию - человека и робота в рабочем пространстве. Причем предусмотрен как полностью автоматизированный режим робота, так и виды работы или режимы, в которых осуществляется взаимодействие человека (2) и робота (1), с обеспечением гибкой адаптации к различным степеням взаимодействия между человеком и роботом. 2 н. и 10 з.п. ф-лы, 3 ил.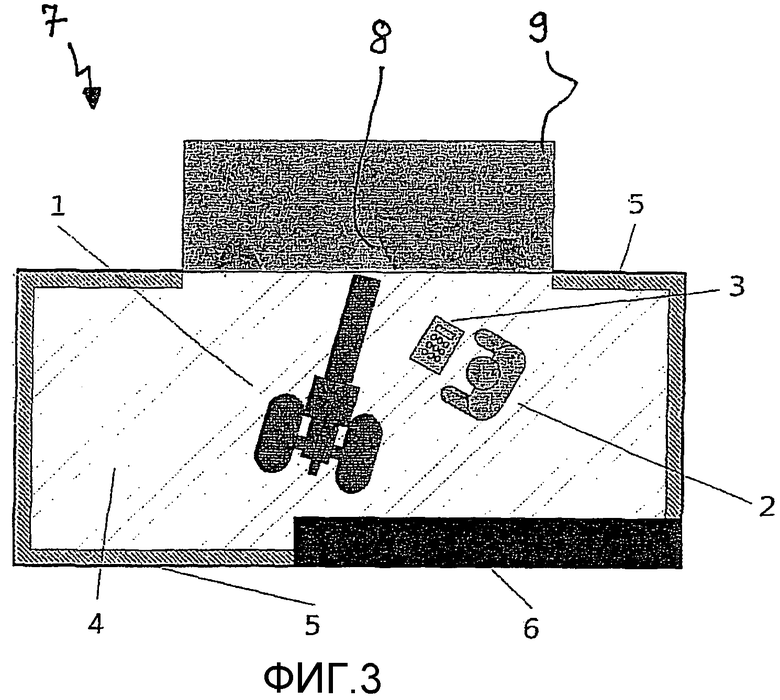
1. Роботизированная система, размещенная в металлургической или прокатной установке и сопоставленная рабочему месту или рабочей зоне работника, содержащая робот (1) с системой управления роботом, имеющей виды работы и режимы работы, обеспечивающие соответствующий интерфейс взаимодействия человека с роботом с различными формами взаимодействия между человеком (2) и роботом (1) и оказывающие влияние на упомянутый интерфейс взаимодействия человека с роботом, при этом упомянутые виды работы и режимы работы сохранены либо непосредственно в системе управления роботом или в элементах памяти, взаимодействующих с системой управления роботом с возможностью их произвольной смены, а также остановки или запуска, при этом упомянутые виды работы и режимы работы системы управления роботом выполнены адаптированными и/или адаптируемыми к различным степеням автоматизации робота и/или различным позиционированиям по времени и/или по месту партнеров по взаимодействию - человека и робота в рабочем пространстве, причем предусмотрен как полностью автоматизированный режим робота (1), так и виды работы или режимы работы, в которых осуществляется взаимодействие человека (2) и робота (1), когда человек (2) и робот (1) во времени и в пространстве находятся совместно в зоне функционирования и перемещения робота (1), или когда человек (2) и робот (1) во времени друг за другом находятся в той же самой пространственной области зоны функционирования и перемещения робота (1), или когда робот (1) и человек (2) в раздельных положениях по пространству и, при необходимости, также во времени, в смысле присутствия или действия в различное время, и при этом во взаимодействии, совместно работают друг за другом для выполнения общего задания, при этом робот посредством отключения и подключения видов работы и/или режимов работы выполнен с возможностью адаптации к различным функциональностям и/или рабочим действиям.
2. Роботизированная система по п.1, отличающаяся тем, что интерфейс взаимодействия человека с роботом реализован в форме ручного или голосового управления.
3. Роботизированная система по п.1, отличающаяся тем, что она оснащена обслуживаемым человеком (2) согласующим устройством или электромеханическим или электромагнитным переключателем, постоянно приводимым в действие с обеспечением эффективных управляющих сигналов для несущих опасность состояний.
4. Роботизированная система по п.1, отличающаяся тем, что она содержит сенсорную систему безопасности, содержащую сенсор или комбинацию сенсоров, которая детектирует присутствие человека (2) в соотнесенной с рабочей зоной робота зоне (4) безопасности и/или входной зоне (5), и/или в зоне детектирования.
5. Роботизированная система по п.4, отличающаяся тем, что система безопасности дополнительно выполнена с возможностью контроля соответствующего рабочего места человека или рабочей зоны робота по отношению к опасным состояниям, в частности, состояниям установки, которые не обязательно проистекают непосредственно и главным образом из перемещений и действий робота (1), но и вытекает из состояния установки или условий на рабочем месте.
6. Роботизированная система по п.4 или 5, отличающаяся тем, что система безопасности выполнена с возможностью выработки сигнала тревоги в случае опасности.
7. Роботизированная система по п.1, отличающаяся тем, что виды работы и режимы работы робота (1) также включают в себя режим манипуляции.
8. Способ эксплуатации роботизированной системы, размещенной в металлургической или прокатной установке и сопоставленной рабочему месту или рабочей зоне работника, содержащей робот (1) с системой управления роботом, имеющей виды работы и режимы работы, обеспечивающие соответствующий интерфейс взаимодействия человека с роботом с различными формами взаимодействия между человеком (2) и роботом (1) и оказывающие влияние на упомянутый интерфейс взаимодействия человека с роботом, при этом упомянутые виды работы и режимы работы сохранены либо непосредственно в системе управления роботом или в элементах памяти, взаимодействующих с системой управления роботом с возможностью их произвольной смены, а также остановки или запуска, при этом упомянутые виды работы и режимы работы системы управления роботом выполнены адаптированными и/или адаптируемыми к различным степеням автоматизации робота и/или различным позиционированиям по времени и/или по месту партнеров по взаимодействию - человека и робота в рабочем пространстве, причем предусмотрен как полностью автоматизированный режим робота (1), так и виды работы или режимы работы, в которых осуществляется взаимодействие человека (2) и робота (1), когда человек (2) и робот (1) во времени и в пространстве находятся совместно в зоне функционирования и перемещения робота (1), или когда человек (2) и робот (1) во времени друг за другом находятся в той же самой пространственной области зоны функционирования и перемещения робота (1), или когда робот (1) и человек (2) в раздельных положениях по пространству и, при необходимости, также во времени, в смысле присутствия или действия в различное время, и при этом во взаимодействии, совместно работают друг за другом для выполнения общего задания, при этом для адаптации робота (1) к различным функциональностям и/или рабочим действиям производят отключение и подключение видов работы и/или режимов работы робота.
9. Способ по п.8, отличающийся тем, что отключение и подключение видов работы и/или режимов работы осуществляют в форме ручного или голосового управления.
10. Способ по п.8 или 9, отличающийся тем, что детектируют присутствие человека (2) в соотнесенной с рабочей зоной робота зоне (4) безопасности, и/или входной зоне (5), и/или в зоне детектирования.
11. Способ по п.8 или 9, отличающийся тем, что осуществляют контроль соответствующего рабочего места человека или рабочей зоны робота по отношению к опасным состояниям, в частности, состояниям установки, которые не обязательно проистекают непосредственно и главным образом из перемещений и действий робота (1), но и вытекает из состояния установки или условий на рабочем месте.
12. Способ по п.8, отличающийся тем, что осуществляют выбор видов работы и режимов работы робота (1), включающих в себя режим манипуляции.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| DE 102005003827 A1, 27.07.2006 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 6073678 A, 13.06.2000. | |||

