ОБЛАСТЬ ТЕХНИКИ
[1] Настоящее техническое решение, в общем, относится к области дезинфицирующего оборудования для обеззараживания воздуха и различных поверхностей, а в частности, к роботизированному устройству для дезинфекции помещений.
УРОВЕНЬ ТЕХНИКИ
[2] Одним из главных способов борьбы с распространением инфекционных заболеваний и предотвращения глобальных эпидемий в обществе являются дезинфекционные мероприятия. Дезинфекция - это комплекс мероприятий, целью которых является ликвидация микроорганизмов для недопущения распространения болезней, которые вызываются бактериями и вирусами. Необходимость и важность дезинфекции человечество осознало еще в средние века, когда в Европе были эпидемии чумы, тифа, холеры и других заразных болезней. С развитием научно-технического прогресса методы и приемы дезинфекции значительно изменились и шагнули вперед. Так, в настоящее время применяются различные способы дезинфекции помещений, например, химический, который предполагает обработку поверхностей специальными растворами, физический, использующий УФ-лампы для инактивации патогенов, комбинированный, аэрозольный и т.д. Наиболее эффективным методом дезинфекции воздуха и поверхностей в закрытых помещениях считается механическая дезинфекция с помощью бактерицидных облучателей ультрафиолетовым облучением. Такие облучатели могут быть потолочными, настенными, передвижными, и в настоящее время активно применяются для дезинфекции медицинских учреждений, школ, общественного транспорта, торговых центров и т.д.
[3] Такой способ дезинфекции разрушает ДНК живых клеток и ионизирует кислород за счет излучения в определенном спектре. Для проведения качественной дезинфекции источник излучения должен находиться достаточно близко к обеззараживаемой поверхности. В настоящее время дезинфекцию с использованием бактерицидных ламп, работающих в УФ-диапазоне, проводят либо специально обученный персонал в защитных костюмах, либо с помощью установок, размещаемых в помещении. Однако такие способы мало эффективны, так как в первом случае качество дезинфекции зависит от человеческого фактора, а во втором присутствует вероятность того, что мощности излучения установки будет недостаточно для качественной дезинфекции всего помещения, также, при наличии затененных зон, некоторые области могут быть вообще не продезинфицированы. Кроме того, такие способы занимают много времени, что также сказывается на пропускной способности таких помещений.
[4] Из уровня техники известно устройство для дезинфекции поверхностей, описанное в заявке США № US 2017112954 А1 (заявитель: DAYLIGHT MEDICAL INC), опубл. 27.04.2017. Указанное устройство состоит из набора УФ-ламп для обеззараживания поверхностей требуемого помещения, питаемых с помощью электросети, и мобильной платформы, выполненной с возможностью перемещения указанного устройства по заранее заданному оператором маршруту или по маршруту, проложенному с помощью линий, нарисованных на полу помещения. Измерение количества энергии, которой подвергается облучаемая поверхность помещения определяется с помощью специальных датчиков, которые оператор устанавливает в помещении. Перемещение указанного устройства между помещениями происходит при помощи оператора.
[5] К недостаткам такого устройства можно отнести влияние человеческого фактора на качество дезинфекции при построении маршрута, невозможность реагирования на непредвиденные препятствия, находящиеся в помещении в момент дезинфекции, а также отсутствие полной автоматизации процесса дезинфекции. Кроме того, для мониторинга излучаемой энергии в указанном решении используются специальные датчики, которые требуется размещать в помещении перед каждым циклом дезинфекции. Также, не смотря на частичную автоматизацию процесса дезинфекции и установки датчиков для мониторинга излучаемой энергии, указанный процесс занимает достаточно длительное время, т.к. оператор вынужден размещать датчики в определенных местах, следить за показаниями излучаемой энергии и при достижении определенного значения отправлять команду на устройство для дезинфекции на перемещение в следующую точку дезинфекции, либо проводить цикл дезинфекции в автономном режиме с фиксированным временем облучения на маршруте.
[6] Из уровня техники также известно роботизированное устройство для дезинфекции помещений, описанное в международной заявке № WO 2014039076 A1 (заявитель: ANGEL1NI PHARMA INC), опубл. 13.03.2014. Указанное устройство представляет собой мобильную роботизированную платформу, на которой располагаются УФ-лампы, причем, указанная платформа снабжена датчиками для определения и объезда препятствий и выполнена с возможностью перемещения по заранее заданному оператором маршруту.
[7] Недостатками такого решения, является отсутствие возможности построения гибкого маршрута в зависимости от требуемого уровня обеззараживания конкретных поверхностей в помещении, общего времени, отведенного на дезинфекцию и излучаемой энергии. Кроме того, указанное устройство не обеспечивает мониторинг обеззараженных участков, что не дает полной информации о качестве проведенной дезинфекции.
[8] Общими недостатками существующих решений в данной области являются отсутствие роботизированных устройств для дезинфекции помещений, способных в автономном режиме качественно и в короткие сроки проводить дезинфекцию помещений, даже при нахождении в помещении посторонних объектов, затемняющих некоторые области. Также такого рода устройство должно минимизировать время облучения поверхности за счет выбора оптимальной точки дезинфекции в помещении и предоставлять отчет о результатах дезинфекции.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
[9] Данное техническое решение направлено на устранение недостатков, присущих существующим решениям, известным из уровня техники.
[10] Технической проблемой (или технической задачей) в данном техническом решении является создание нового роботизированного устройства для дезинфекции помещений, обеспечивающего быструю и эффективную дезинфекцию.
[11] Основным техническим результатом, проявляющимся при решении вышеуказанной задачи, является повышение эффективности дезинфекции помещения, за счет интеллектуального определения точек дезинфекции и времени облучения.
[12] Другим техническим результатом, проявляющимся при решении вышеуказанной задачи, является расширение арсенала технических средств.
[13] Заявленные технические результаты достигаются за счет реализации роботизированного устройства для дезинфекции помещений, содержащего:
• логистическую платформу, выполненную с возможностью перемещения роботизированного устройства;
• корпус, жестко прикрепленный к логистической платформе, содержащий:
• модуль дезинфекции, содержащий по меньшей мере одну УФ-лампу, обеспечивающую дезинфекционную обработку;
• модуль человеко-машинного взаимодействия, выполненный с возможностью идентификации пользователя и установки режима работы роботизированного устройства,
• по меньшей мере одно оптико-электронное устройство,
• модуль управления, выполненный с возможностью:
 построения карты помещений,
построения карты помещений,
 сбора и обработки информации с по меньшей мере одного оптико-электронного устройства,
сбора и обработки информации с по меньшей мере одного оптико-электронного устройства,
 построения набора точек дезинфекции в помещении, на основе полученной карты помещений,
построения набора точек дезинфекции в помещении, на основе полученной карты помещений,
вычисления времени облучения в каждой построенной точке,
 формирования данных для передачи модулю дезинфекции на основе построенного набора точек дезинфекции и вычисленного времени облучения.
формирования данных для передачи модулю дезинфекции на основе построенного набора точек дезинфекции и вычисленного времени облучения.
[14] В одном из частных вариантов реализации роботизированное устройство дополнительно содержит приемо-передающий модуль.
[15] В другом частном варианте реализации логистическая платформа дополнительно содержит разъем для подключения зарядной станции.
[16] В другом частном варианте реализации логистическая платформа включает по меньшей мере колеса, редуктора, двигатели, контроллеры двигателе.
[17] В другом частном варианте реализации оптико-электронное устройство выбирается из группы: лазерный дальномер, камера, камера глубины.
[18] В другом частном варианте реализации роботизированное устройство дополнительно содержит устройство акустического анализа, выбираемого из группы ультразвуковой датчик, ультразвуковой дальномер, сонар.
[19] В другом частном варианте реализации модуль человеко-машинного взаимодействия содержит по меньшей мере: экран, динамик, микрофонный массив.
[20] В другом частном варианте реализации экран выполняется сенсорным.
[21] В другом частном варианте реализации модуль человеко-машинного взаимодействия дополнительно содержит по меньшей мере один орган управления, выбираемый из группы: клавиатура, сенсорная клавиатура, джойстик, тачпад.
[22] В другом частном варианте реализации при построении карты помещений учитываются характеристики зон помещений.
[23] В другом частном варианте реализации характеристики зон помещений представляют собой по меньшей мере одно из: зона, запретная для перемещения роботизированного устройства; зона, не предназначенная для осуществления дезинфекции; зона с заданной степенью облучения с помощью УФ-лампы.
[24] В другом частном варианте реализации модуль управления выполнен с возможностью построения 2D и/или 3D карты помещений.
[25] В другом частном варианте реализации точки дезинфекции и время облучения в указанных точках определяются на основе по меньшей мере: размеров помещения; объема воздушной массы в помещении.
[26] В другом частном варианте реализации при определении точек дезинфекции и времени облучения в указанных точках дополнительно учитывается по меньшей мере одно из: заданная степень облучения зоны помещения; минимизации общего времени дезинфекции, требуемого для обработки зоны помещения.
[27] В другом частном варианте реализации модуль управления дополнительно выполнен с возможностью оценки результатов дезинфекции.
[28] В другом частном варианте реализации результат дезинфекции оценивается на основе следующих критериев: фактическое время проведения обработки; суммарная энергия излучения для каждой поверхности и объем воздушной массы; наличие создающих затенение посторонних объектов в обрабатываемых помещениях; наличие прерываний обработки; разница между запланированными и фактическими параметрами дезинфекции.
[29] В другом частном варианте реализации результаты оценки дезинфекции дополнительно отображаются в виде цветового градиента каждой зоны помещения.
[30] В другом частном варианте реализации модуль управления дополнительно выполнен с возможностью выявления человека в дезинфицируемом помещении, на основе информации, полученной от по меньшей мере одного оптико-электронного устройства.
[31] В другом частном варианте реализации модуль управления дополнительно выполнен с возможностью выявления человека в дезинфицируемом помещении на основе информации, полученной от по меньшей мере внешних датчиков открывания дверей и/или датчиков движения и проникновения, установленных в помещении.
[32] В другом частном варианте реализации при выявлении человека в дезинфицируемом помещении происходит отключение модуля дезинфекции.
[33] В другом частном варианте реализации при выявлении человека дополнительно подается сигнал, посредством модуля человеко-машинного взаимодействия, о необходимости покинуть помещение.
[34] Также, указанные технические результаты достигаются за счет реализации способа дезинфекции помещений, выполняемого роботизированным устройством для дезинфекции помещений, включающего этапы, на которых:
• строят карту помещений, в которых требуется провести дезинфекцию;
• отправляют с помощью внешнего устройства команду на выполнение дезинфекции, причем упомянутая команда содержит координаты по меньшей мере одной точки дезинфекции;
• строят точки дезинфекции и вычисляют требуемое время облучения в построенных точках на основе построенной карты помещений;
• выполняют дезинфекцию в указанной по меньшей мере одной точке дезинфекции с учетом вычисленного времени облучения.
[35] В частном варианте реализации способа при построении карты помещений учитываются характеристики зон помещений.
[36] В другом частном варианте реализации способа, характеристики зон помещений представляют собой по меньшей мере одно из: зона, запретная для перемещения роботизированного устройства; зона, не предназначенная для осуществления дезинфекции; зона с заданной степенью облучения с помощью УФ-лампы.
[37] В другом частном варианте реализации способа, что точки дезинфекции и время облучения в указанных точках определяются на основе по меньшей мере: размеров помещения; объема воздушной массы в помещении.
[38] В другом частном варианте реализации способа дополнительно учитывается по меньшей мере одно из: заданная степень облучения зоны помещения; минимизация общего времени дезинфекции, требуемого для обработки зоны помещения.
[39] В другом частном варианте реализации способ дополнительно содержит этап оценки результатов дезинфекции.
[40] В другом частном варианте реализации способа результат дезинфекции оценивается на основе следующих критериев: фактическое время проведения обработки; суммарная энергия излучения для каждой поверхности и объем воздушной массы; наличие создающих затенение посторонних объектов в обрабатываемых помещениях; наличие прерываний обработки; разница между запланированными и фактическими параметрами дезинфекции.
[41] В другом частном варианте реализации способа результаты оценки дезинфекции дополнительно отображаются в виде цветового градиента каждой зоны помещения. [42] В другом частном варианте реализации способ дополнительно содержит этап выявления человека в дезинфицируемом помещении, на основе информации, полученной от по меньшей мере одного оптико-электронного устройства.
[43] В другом частном варианте реализации способ дополнительно содержит этап выявления человека в дезинфицируемом помещении на основе информации, полученной от по меньшей мере внешних датчиков открывания дверей и/или датчиков движения и проникновения, установленных в помещении.
[44] В другом частном варианте реализации способа при выявлении человека в дезинфицируемом помещении происходит отключение модуля дезинфекции.
[45] В другом частном варианте реализации способа при выявлении человека дополнительно подается сигнал, посредством модуля человеко-машинного взаимодействия, о необходимости покинуть помещение.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
[46] Признаки и преимущества настоящего изобретения станут очевидными из приводимого ниже подробного описания изобретения и прилагаемых чертежей, на которых:
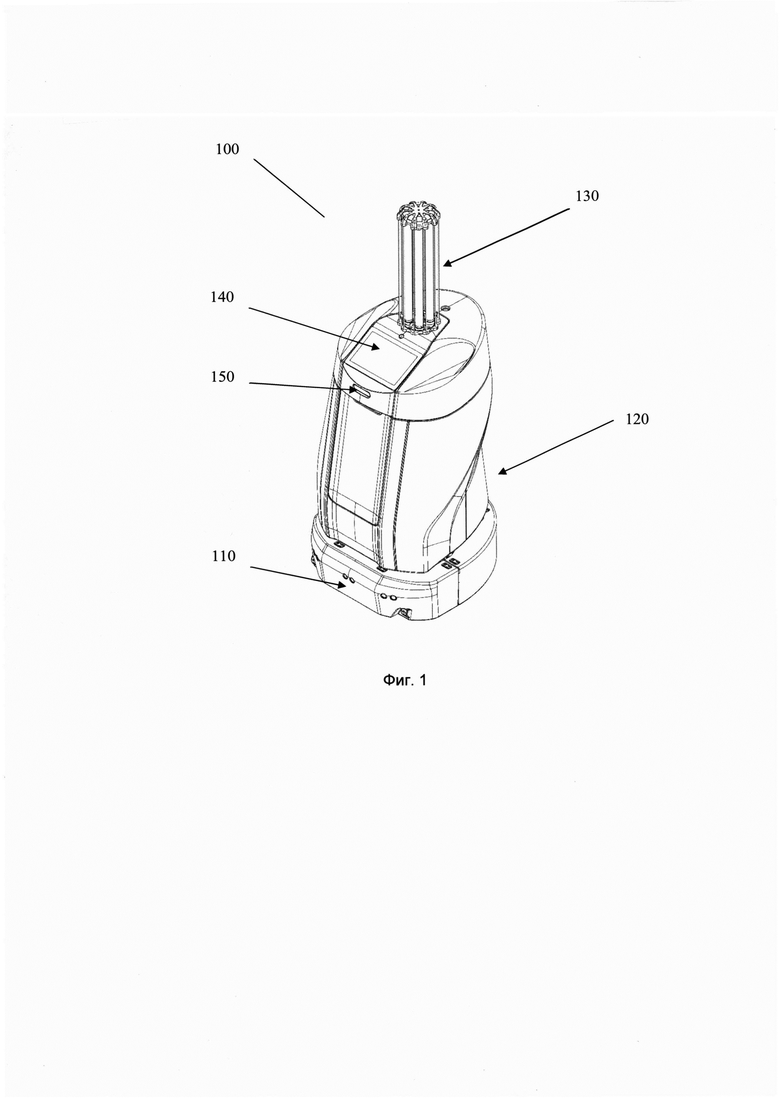
[47] Фиг. 1 иллюстрирует общий вид роботизированного устройства для дезинфекции помещений.
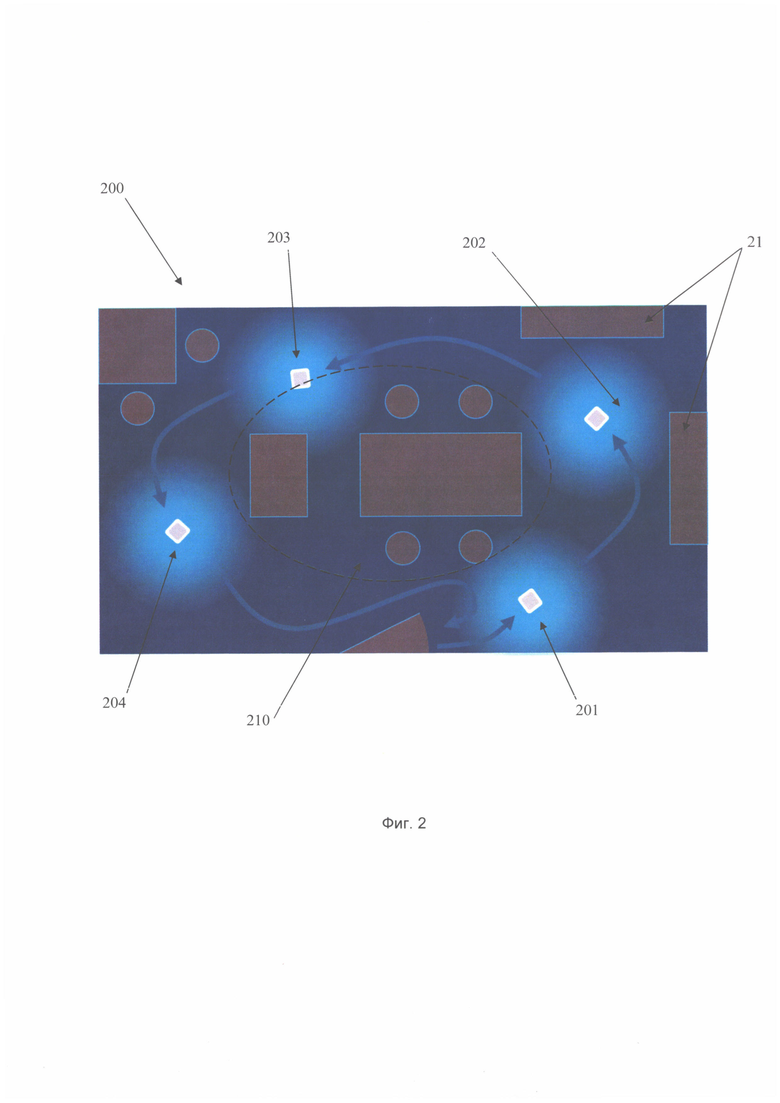
[48] Фиг. 2 иллюстрирует пример построения точек дезинфекции в помещении.
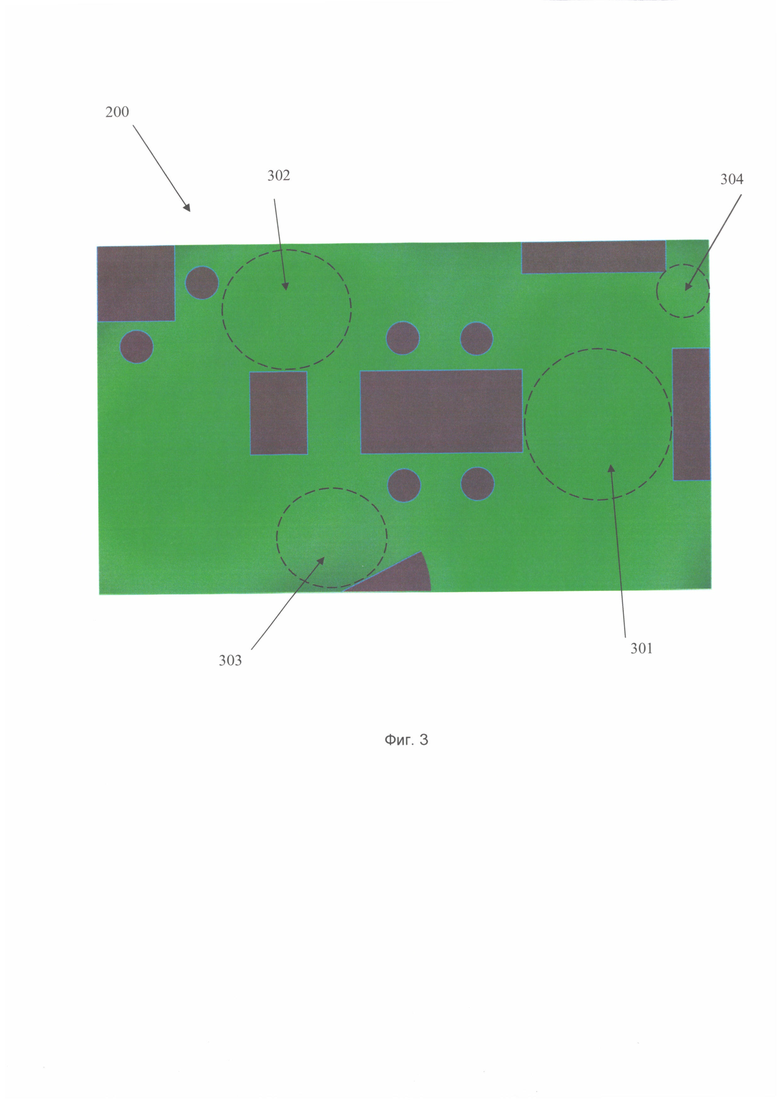
[49] Фиг. 3 иллюстрирует пример отображения отчета о результатах дезинфекции.
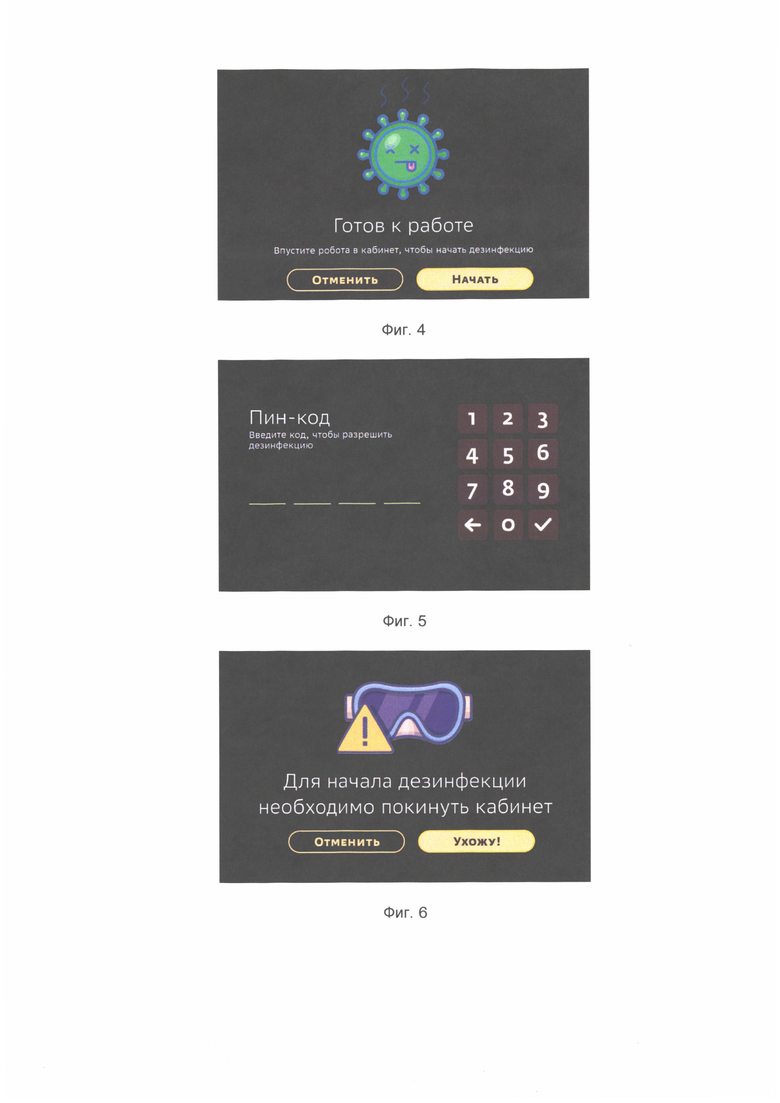
[50] Фиг. 4-6 иллюстрирует пример взаимодействия пользователя с роботизированным устройством.
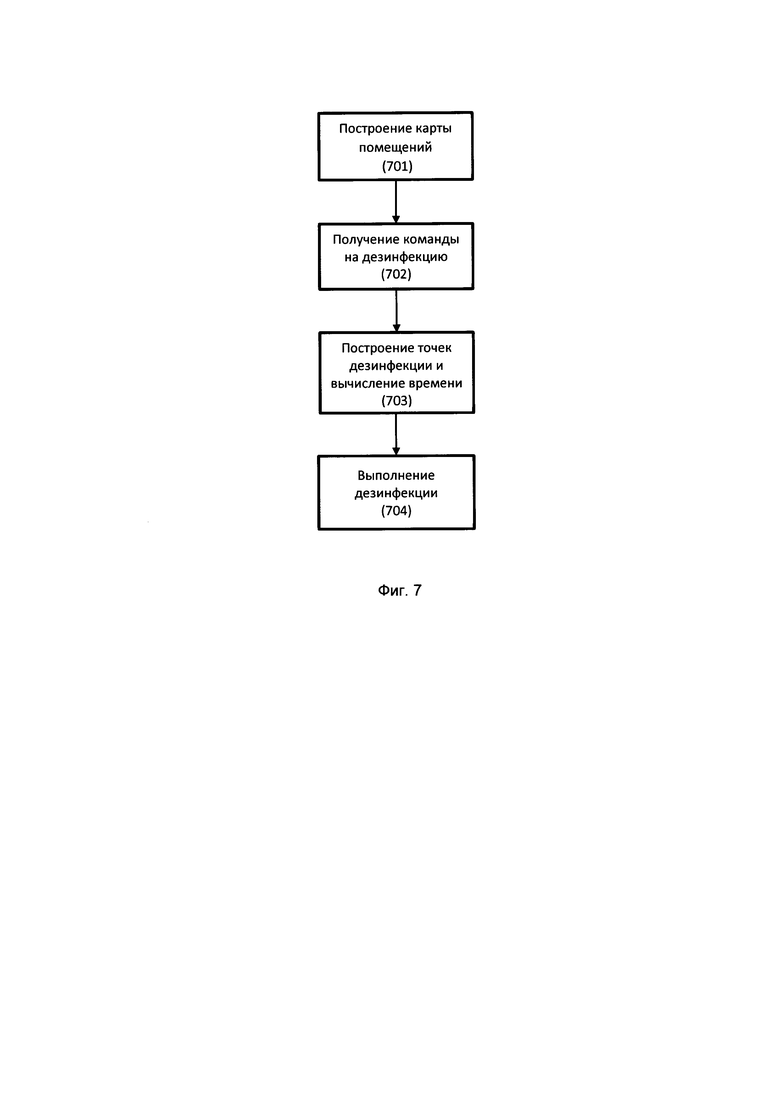
[51] Фиг. 7 иллюстрирует общий вид блок-схемы способа дезинфекции помещений при помощи роботизированного устройства.
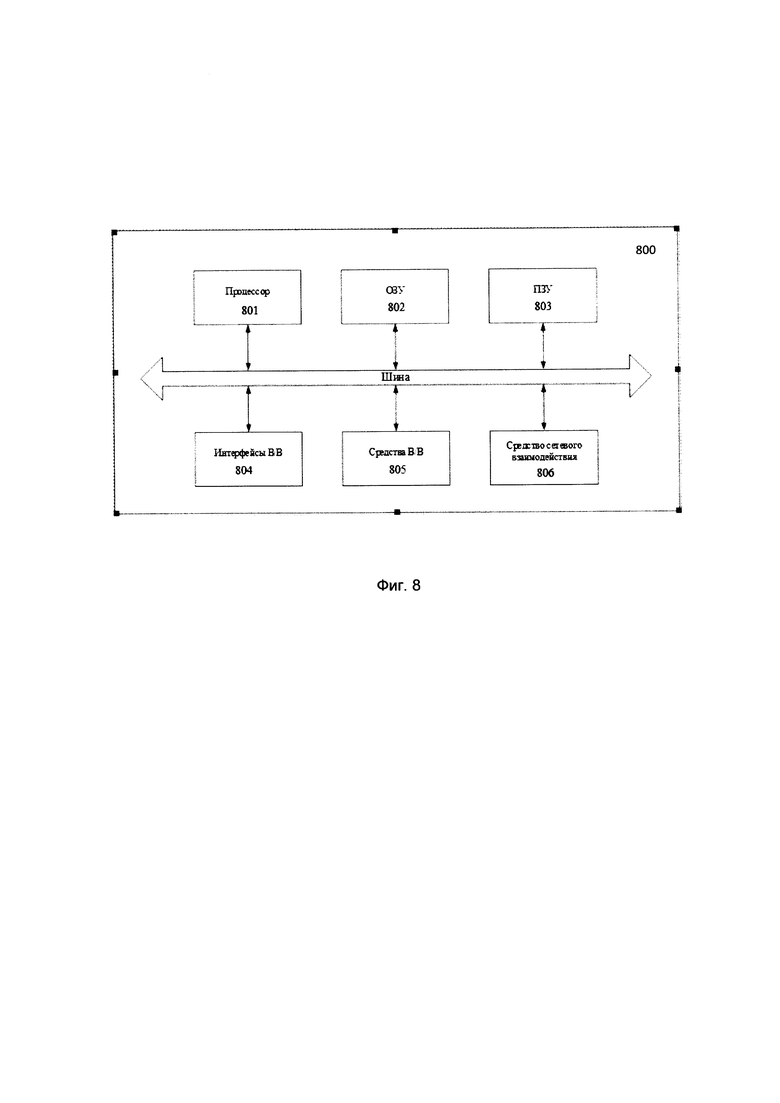
[52] Фиг. 8 иллюстрирует общий вид вычислительных модулей, для реализации роботизированного устройства.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[53] Заявленное решение позволяет проводить дезинфекцию помещения и/или дезинфекцию определенных поверхностей в автономном режиме, строить карту пространства, определять набор точек дезинфекции и рассчитывать время облучения в указанных точках на основе характеристик помещения таким образом, чтобы минимизировать требуемое на помещение и/или часть открытого пространства время дезинфекции, выявлять человека в процессе дезинфекции и приостанавливать дезинфекцию в случае выявления человека, оценивать результаты выполненной дезинфекции. Настоящие преимущества заявленного технического решения станут очевидными из раскрытого далее подробного описания.
[54] На Фиг. 1 представлен общий вид роботизированного устройства для дезинфекции помещений 100. Указанное устройство 100 предназначено для автономной дезинфекции воздуха и поверхностей в помещениях и/или определенной части поверхностей в случае проведения дезинфекции на открытых пространствах. Устройство 100 содержит логистическую платформу 110, корпус 120, модуль дезинфекции 130, модуль человеко-машинного взаимодействия 140, по меньшей мере одно оптико-электронное устройство 150, модуль управления (не показан).
[55] Элементы заявленного роботизированного устройства 100 фиксируются между собой и несущими элементами конструкции, с помощью широкого спектра сборочных операций, например, свинчивания, сочленения, спайки, склепки и др., в зависимости от наиболее подходящего способа крепления элементов.
[56] Логистическая платформа 110 обеспечивает перемещение устройства 100 в пространстве и состоит, по меньшей мере из колес, редукторов, двигателей, контроллеров двигателей. Питание логистической платформы может происходить как от проводного электрического соединения, так и от внутреннего источника питания, установленного на указанной платформе 110. В одном варианте осуществления логистическая платформа 110 дополнительно содержит контакты для подключения к зарядной станции. Кроме того, в другом частном варианте осуществления логистическая платформа 110 может быть выполнена в виде рамы, на которой закреплены мотор колеса и контроллеры мотор колес. В еще одном частном варианте осуществления логистическая платформа 110 дополнительно может содержать механический бампер, предназначенный для смягчения удара в случае столкновения с препятствием, не обнаруженным ни одним из оптико-электронных средств 150 и/или устройств акустического анализа, раскрытых более подробно ниже.
[57] В еще одном частном варианте осуществления логистическая платформа 110 представляет собой мобильную колесную платформу, выполненную с возможностью получения параметров перемещения, включающих, например, координаты расположения помещения, скорость движения, маршрут, периоды остановки в точках дезинфекции и т.д., от модуля управления и перемещения указанного устройства 100 в соответствии с полученными параметрами. Указанные параметры могут передаваться от модуля управления и содержать все необходимую информацию для осуществления автономного движения устройства 100 с помощью платформы 110. Стоит также отметить, что координаты расположения помещения могут представлять собой как физические координаты в пространстве, например, заданная точка на карте, широта и долгота и т.д., не ограничиваясь, так и условные координаты, выраженные, например, номером помещения, названием помещения и т.д., не ограничиваясь. Условные координаты могут преобразовываться в физические координаты с помощью, например, базы данных, хранящейся в модуле управления. Для специалиста в данной области техники будет очевидно, что интерпретация условных координат в физическую точку на, карте может происходить любым из известных способов и не ограничивается описанным примером. Так, например, условные координаты могут преобразовываться с помощью сервера и отправляться в модуль управления. Преобразование может также происходить на основе таблицы соответствия и т.д.
[58] В одном частном варианте осуществления логистическая платформа 110 дополнительно содержит контроллер управления логистической платформой, выполненный с возможностью получения сигналов от модуля управления и следования по заданному модулем управления маршруту. В качестве колес могут быть использованы омниколеса, обыкновенные колеса и т.д., не ограничиваясь. Для специалиста в данной области техники очевидно, что колесная платформа может состоять из любого количества и типа колес, обеспечивающего движение указанной платформы по заданному маршруту с соблюдением параметров перемещения. Выбор конкретной платформы может зависеть, например, от типа дезинфицируемого помещения. Кроме того, количество редукторов, двигателей и контроллеров двигателей или мотор колес также будет варьироваться в зависимости от типа платформы. Так, при дезинфекции достаточно малогабаритных помещений, например, общественного транспорта, где требуется более высокая мобильность может быть использована 3-х колесная платформа, содержащая 3 редуктора, 3 двигателя и 3 контроллера двигателей на каждое колесо.
[59] В еще одном частном варианте осуществления логистическая платформа ПО дополнительно может содержать устройства акустического анализа, такие как, ультразвуковой датчик, ультразвуковой дальномер, сонар. В другом частном варианте осуществления логистическая платформа 110 может, дополнительно содержать оптико-электронные средства, например, лазерные дальномеры. Для специалиста в данной области техники очевидно, что указанные средства акустического анализа и оптико-электронные средства не ограничиваются установкой только на указанную платформу 110, но также могут быть установлены и непосредственно на корпусе 120 устройства 100.
[60] Кроме того, стоит также отметить, что во время следования по маршруту, при обнаружении непредвиденных препятствий с помощью устройств акустического анализа и/или оптико-электронных средств 150, указанные устройства выполнены с возможностью отправки данных о препятствии модулю управления, и указанный модуль управления может скорректировать на основе полученных данных маршрут следования и параметры перемещения, в соответствии с указанным препятствием, как будет раскрыто подробнее ниже.
[61] На логистической платформе 110 расположен корпус 120. Указанный корпус 120 жестко соединен с логистической платформой 110. Внутри корпуса 120 располагается модуль полезной нагрузки, включающий, по меньшей мере источник питания модуля дезинфекции, модуль управления, приемо-передающий модуль. В другом частном варианте осуществления, модуль дезинфекции 130 может получать питание от источника питания, расположенного на логистической платформе. На корпусе 120 расположены модуль человеко-машинного взаимодействия 140, модуль дезинфекции 130, оптико-электронные средства 150. Корпус 120 может быть выполнен из углеродного стеклопластика, пластика, оргстекла и т.п., не ограничиваясь. Как упоминалось выше, на корпусе 120 в одном из частных вариантов осуществления также могут располагаться устройства акустического анализа и/или по меньшей мере одно или несколько оптико-электронных средств 150, предназначенных для детектирования препятствий и/или людей и передачи данных модулю управления.
[62] Модуль дезинфекции 130 предназначен для инактивации патогенов различного происхождения ультрафиолетовым излучением. Модуль дезинфекции 130 содержит по меньшей мере одну УФ-лампу. В качестве УФ-ламп могут использоваться бактерицидные лампы, стандартные ультрафиолетовые лампы, кварцевые и т.д. В свою очередь некоторые указанные типы ламп могут разделяться на подтипы, так, например, бактерицидные лампы могут быть газоразрядными лампами (безозоновые) или также называемыми разрядными лампами, и кварцевыми (озоновыми). Газоразрядные лампы могут являться ртутными лампами, с длиной волны 253,7 нм, что считается особенно подходящим для бактерицидной дезинфекции, импульсными лампами, такими как ксеноновая лампа-вспышка, с длиной волны порядка 260 нм и т.д. В качестве газа, применяемого в газоразрядных лампах может быть ксенон, гелий, аргон, неон, кислород и т.д. Кроме того, указанные лампы могут иметь разную конструкцию. Для специалиста будет очевидно, что в качестве УФ-ламп может быть использован любая известная конструкция и тип ламп.
[63] В частных вариантах осуществления модуль дезинфекции, может представлять блок УФ-излучателей. Кроме того, для изменения направления излучения ламп в конструкции могут быть установлены отражатели. Отражатель может быть выполнен с возможностью оптимизации угла падения, под которым ультрафиолетовый свет направляется к поверхностям объектов. В еще одном частном варианте осуществления модуль 130 может представлять блок химической дезинфекции.
[64] Для осуществления дезинфекции помещений модуль 130 выполнен с возможностью получения управляющих сигналов от модуля управления и активации/деактивации УФ-лампы согласно полученным сигналам для проведения дезинфекции.
[65] Модуль человеко-машинного взаимодействия 140 может состоять из средства отображения графического пользовательского интерфейса (дисплей, экран), средств оповещения голосового пользовательского интерфейса (динамиков), микрофонного массива или микрофона, физических и/или сенсорных клавиш (клавиатуры), сенсорного экрана, считывателя отпечатка пальца, стерео-камеры, считывателя ключ-карты и т.д.
[66] Экран может представлять собой жидкокристаллический дисплей (ЖК-дисплей), сенсорный экран и т.п. Сенсорный экран может быть представлен в виде тачпада. В качестве клавиатуры может использоваться, например, пин-пад, сенсорная клавиатура, джойстик и т.п.
[67] Модуль человеко-машинного взаимодействия 140 также выполнен с возможностью аутентификации пользователя и взаимодействия с персоналом в процессе подготовки к дезинфекции, по окончании дезинфекции и при обнаружении человека в процессе дезинфекции, а также при выполнении им производственных сценариев. В одном частном варианте осуществления взаимодействие с персоналом может происходить с помощью удаленного графического интерфейса управления роботизированным устройством 100, например, с помощью внешнего устройства пользователя, веб-интерфейса, сервера и т.д.
[68] В качестве производственных сценариев подразумевается по меньшей мере один из следующий сценариев: режим работы роботизированного устройства 100, активация ручного управления, обработка роботизированного устройства 100 (сервисный режим) и т.д.
[69] Указанные сценарии могут применяться для выполнения определенных функций устройства. Под сценарием выбора режима работы роботизированного устройства 100, может пониматься выбор автономного режима работы, при котором после получения команды на дезинфекцию устройство 100 проводит все этапы дезинфекции и получает всю необходимую информацию при помощи собственных средств, выбор смешанного режима работы, при котором персонал или пользователь, уполномоченный и имеющий право на взаимодействие с устройством 100 задает часть параметров вручную с помощью, например, внешнего устройства и/иди модуля 140, и т.д., не ограничиваясь.
[70] Сценарий активации ручного управления подразумевает полный контроль над органами управления устройства 100. Указанный сценарий может использоваться, например, для первичного построения карты помещений.
[71] Сценарий сервисного режима работы (обработка устройства 100) может представлять перемещение устройства 100 в заранее заданное время в помещение для автоматической и/или ручной обработки, или перемещение в сервисный центр, или режим ограниченного функционирования и т.д., не ограничиваясь.
[72] Функциональные возможности и более подробное описание сценариев раскрывается ниже.
[73] Аутентификация пользователя может осуществляться с помощью ввода пароля на дисплее, произнесения фразы как текст зависимой (произнесения контрольной фразы с экрана), так и текст независимой (произнесения произвольного текста), например, биометрический образец голоса, демонстрации лица пользователя (биометрический образец лица), прикладывания к соответствующему сенсору пальца, ладони и/или ключевого носителя, сканирование сетчатки глаза.
[74] При идентификации модулем 140 производится: анализ биометрических образцов, (дактилоскопия) отпечатка пальца/венозной сетки ладони, и/или считывание ключевой информации с ключевого носителя и в зависимости от результата, выводит на экран соответствующую информацию об отказе или предоставлении доступа пользователю.
[75] Оптико-электронными устройствами 150 могут являться, по меньшей мере следующие средства: камера глубины, камера, лазерный дальномер и т.д. Стоит также отметить, что в данном решении устройства 150 также могут представлять средства 150 и могут являться любым пригодным типом устройств или средств, обеспечивающих предписанные им функции. Как упоминалось выше, средства 150 могут располагаться как на корпусе 120, так и непосредственно на платформе 110. Средства 150 предназначены для обеспечения технического зрения указанному устройству 100. Т.е. средства 150 выполнены с возможностью обнаружения препятствий, обрывов, порогов, людей в помещении, а также определения расстояния до стен и объектов в помещении. Кроме того, указанные средства 150 обеспечивают перемещение по указанной построенной карте в присутствии людей до требуемого помещения. В одном из частных вариантов реализации, для выполнения вышеуказанных функций, вместе/вместо со средствами 150 могут использоваться устройства акустического анализа, представляющие собой ультразвуковой датчик, ультразвуковой дальномер, сонар. Данные, получаемые оптико-электронными средствами 150 передаются для дальнейшей обработки в модуль управления. Специалисту в данной области техники будет очевидным, что, не смотря на описанные выше примеры реализации сенсоров в виде оптико-электронных средств и/или устройств акустического анализа, для выполнения функций отслеживания могут быть использованы любые известные сенсоры.
[76] Модуль управления может являться бортовый вычислителем, контроллером, микроконтроллером, ЭВМ (электронно-вычислительная машина), ЧПУ (числовое программное управление), ПЛК (программируемый логический контроллер) и любые другие устройства, способные выполнять заданную, четко определенную последовательность вычислительных операций (действий, инструкций). Модуль управления может быть выполнен в виде устройства или модуля, описанного более подробно на фиг. 8. Модуль управления выполнен с возможностью получения и обработки информации от средств 150 и построения карты помещений на основе полученной информации, интеллектуального построения набора точек дезинфекции в помещении, на основе полученной карты помещений, вычисления времени облучения в каждой построенной точке, формирования данных для передачи модулю дезинфекции 130 на основе построенного набора точек дезинфекции и вычисленного времени облучения и управления перемещением логистической платформы 110. В одном частном варианте осуществления модуль управления дополнительно выполнен с возможностью оценки результатов дезинфекции. В другом частном варианте осуществления модуль дезинфекции дополнительно выполнен с возможностью выявления человека в дезинфицируемом помещении, на основе информации, полученной от по меньшей мере одного оптико-электронного средства 150 и/или внешних датчиков, подключенных у указанному модулю. В еще одном варианте осуществления модуль управления выполнен с возможностью взаимодействия с внешними устройствами.
[77] Термин «инструкции», используемый в этой заявке, может относиться, в общем, к командам в программе, которые написаны для осуществления конкретной функции, такой как прием ввода, запись сигналов, отправка сигналов на приводные механизмы, распознавание образов, передачи сигналов для начала и/или окончания работы устройства 100. Инструкции могут быть осуществлены множеством способов, включающих в себя, например, объектно-ориентированные методы. Например, инструкции могут быть реализованы, посредством языка программирования С++, Java, различных библиотек (например, "MFC"; Microsoft Foundation Classes) и т.д. Инструкции, осуществляющие процессы, описанные в этом решении, могут передаваться как по проводным, так и по беспроводным линиям передачи.
[78] Далее будут рассмотрены основные алгоритмы и особенности роботизированного устройства 100.
[79] Указанное устройство 100 является полностью автономным и коллаборативным устройством, способным дезинфицировать воздух и поверхности от основных патогенов до уровня 99,9%. Также, указанное устройство 100 повышает эффективность дезинфекции помещения, за счет интеллектуального выбора точек дезинфекции и расчета времени облучения в указанных точках в автоматическом режиме. Это достигается, в том числе, за счет анализа помещения и анализа расположения предметов в нем в реальном времени (при помощи сенсоров, таких как средства 150) в автоматическом режиме и построения точек дезинфекции (оптимальной траектории движения) и расчета времени облучения в указанных точках с учетом реальных полученных характеристик помещения. Кроме того, такой алгоритм выбора точек и расчета времени дезинфекции ускоряет процесс дезинфекции помещений, сохраняя при этом высокую эффективность дезинфекции (99,9%), что также является важным параметром, когда требуется быстрая и эффективная дезинфекция.
[80] Указанное роботизированное устройство 100 способно осуществлять самостоятельную навигацию в закрытых пространствах типа жилых и производственных помещений, медицинских учреждений, транспортных узлов и общественного транспорта. Благодаря алгоритму управления роботизированным устройством 100 при проведении дезинфекции помещений, указанное устройство 100 способно в автономном режиме определять точки дезинфекции, рассчитывать время облучения в указанных точках для оптимизации общего времени проведения дезинфекции в зависимости от ряда факторов. Использование алгоритма оценки результатов дезинфекции позволяет оценить фактические результаты дезинфекции, сравнить их с целевыми, проанализировать фактические результаты и сформировать отчет. Кроме того, роботизированное устройство 100 обеспечивает безопасность для человека, за счет алгоритма обеспечения безопасности, исключая случаи контакта человека с устройством 100 при включенном модуле дезинфекции 130.
[81] Рассмотрим подробнее указанные алгоритмы и особенности.
[82] Взаимодействие с роботизированным устройством 100 может происходить посредством внешних устройств. Внешним устройством может являться персональный компьютер, сервер, смартфон, планшет, носимое умное устройство и т.д. Построение карты помещений может производится при первичных настройках роботизированного устройства 100. При таком варианте построения роботизированное устройство 100 под присмотром оператора, двигается по помещению, собирает информацию с оптико-электронных средств 150 и/или устройств акустического анализа и формирует карту, в случае если карта построилась некачественно, оператор переводит роботизированное устройство 100 на ручное управление и исправляет неточности. Карта помещений может содержать общую карту всего здания (глобальная карта здания, глобальная карта помещений), включая коридоры и карты конкретных помещений, например, кабинетов (локальная карта помещения). После того, как карта построена, она сохраняется в памяти модуля 130 и используется в дальнейшем для построения маршрутов и планирования точек дезинфекции.
[83] В другом частном варианте осуществления карта помещений может быть загружена в роботизированное устройство 100 из базы данных. Карта помещений (глобальная карта и локальная карта) может быть построена в виде как 2D карты, так и 3D карты. Стоит также отметить, что при построении карты оператор может указывать характеристики зон помещений, которые могут содержать, по меньшей мере, зоны, запретные для проезда; зоны, где обработка проводиться не должна; зоны с пониженным уровнем облучения; зоны с повышенным уровнем облучения. Указанные зоны могут быть заданы также посредством внешнего устройства, например, с помощью мобильного интерфейса внешнего устройства, веб-интерфейсе и т.д. Зоны с пониженным уровнем облучения могут представлять, например, служебные помещения с небольшим потоком людей или наименее затрагиваемые и проходимые области. Зоны с повышенным уровнем облучения могут представлять наиболее посещаемые зоны (область приема пациентов в кабинете, кушетка/кровать зараженного пациента и т.д.), области с которыми наиболее часто контактируют люди, например, дверные ручки, кресла и стулья, шкафы и т.д. Кроме того, зоны с повышенным уровнем облучения могут быть заданы исходя из требований к чистоте помещений или типа помещения (палаты, где находились инфицированные вирусами пациенты, операционные и т.д.).
[84] В другом частном варианте осуществления указанные зоны могут быть автоматически определены на основе указанного типа помещения и объектов, которые должны быть продезинфицированы. Так, например, при запросе дезинфекции операционной (как запланированной, так и по вызову оператором), роботизированное устройство 100 выполнено с возможностью определения заданного для такого типа помещения уровня обсемененности и дальнейшего выполнения алгоритмов с учетом указанного уровня. В другом примере, при дезинфекции открытых пространств, устройство 100, посредством средств 150, может определять в заданной части помещения зоны, где требуется повышенный уровень облучения. В качестве таких зон, как упоминалось выше, могут выбираться дверные ручки, мебель и другие предметы, располагающиеся в местах, с которыми люди наиболее часто контактируют. Распознавание таких зон и предметов может происходить при помощи оптико-электронных средств 150 и/или устройств акустического анализа.
[85] После получения всех характеристик зон помещений, роботизированное устройство 100, посредством модуля управления, используя алгоритм построения траектории, определяет по меньшей мере одну точку дезинфекции, из которой будет производиться дезинфекция. Указанная точка выбирается таким образом, чтобы время облучения, которое необходимо сообщить окружающему пространству из этой точки для достижения заданного уровня снижения бактерицидной обсемененности в помещении или определенной зоне помещения (при дезинфекции открытых пространств) было минимально. То есть по меньшей мере одна точка дезинфекции будет определена таким образом, чтобы вся зона вокруг этой точки, с учетом текущего расположения предметов в этой зоне, получила необходимое, в соответствии с требованиями чистоты, количество ультрафиолета за минимально возможное время. Текущее расположение предметов и характеристик пространства, как упоминалось выше, может быть получено в реальном времени модулем управления при помощи сенсоров, таких как средства 150 и/или устройства акустического анализа.
[86] Определение точки дезинфекции/набора точек дезинфекции может происходить на основе заданных требований чистоты помещения (снижения бактерицидной обсемененности) и 3-х мерной карты помещения (3D карта), включающей по меньшей мере габариты помещения и координаты расположения объектов внутри указанного помещения. На основе указанных параметров происходит расчет необходимого количества энергии УФ-излучения на единицу площади и объема в соответствии с заданными нормами чистоты, расчет необходимого времени излучения для сообщения заданного количества энергии на поверхности в зависимости от расположения обрабатываемых поверхностей относительно модуля дезинфекции 130 с учетом расстояния, углов наклона и затенений, которые образуются от находящихся в этом помещении предметов. Кроме того, указанный алгоритм также учитывает количество энергии УФ-излучения, сообщаемое в объем воздуха в зависимости от геометрии помещения, его объемов и затенений.
[87] В другом частном примере реализации выбор точек дезинфекции также будет учитывать посторонние предметы, оставленные в помещении и не учтенные в картах указанного помещения, например, кресло-коляска, ящик с хирургическими инструментами и т.д. При обнаружении таких предметов в помещении, устройство 100 выполнено с возможностью учета затененных зон, созданных этими предметами и определения точек дезинфекции таким образом, чтобы все помещение получило необходимое количество энергии УФ-облучения в минимально возможное время.
[88] На фиг. 2 показан пример построения точек дезинфекции в помещении 200 прямоугольной формы. При въезде в помещение 200, устройство 100 получает всю необходимую информацию о помещении 200. Как указывалось выше, характеристики помещения могут быть получены вместе с командой на дезинфекцию помещения 200 и/или посредством собственной системы сенсоров, таких как средства 150. Характеристики помещения могут включать площадь помещения, высоту стен, заданное требование чистоты к помещению, приоритетные области для обработки и т.д., не ограничиваясь. В качестве дополнительных параметров, на основе которых будет происходить интеллектуальное построение точек дезинфекции, устройство 100 выполнено с возможностью, на основе полученных характеристик помещения, рассчитывать объем воздуха в помещении и определять текущее расположение предметов.
[89] Так, например, устройство 100, определит параметры зоны переговоров 210, включающей стол, стулья, доску, и шкафов 211. Указанными параметрами могут являться высота, расположение в помещении, форма и т.д., не ограничиваясь. Объем воздуха в помещении может быть также рассчитан по стандартным формулам вычисления объема, так, например, зная высоту, ширину и длину помещения, а также плотность воздуха, можно вычислить объем воздуха в таком помещении.
[90] На основе полученной информации о текущем расположении и 3D карты помещения 200, устройство 100 определит наиболее оптимальные точки дезинфекции (201-204) таким образом, чтобы с учетом расположения всех предметов в комнате и затенений, создающихся указанными предметами, все помещение 200 получило необходимое количество энергии УФ-облучения в минимально возможное время. То есть, точки дезинфекции 201-204 будут выбираться так, чтобы заданные параметры чистоты, характеризуемые количеством получаемой энергии предметами и поверхностями от УФ-ламп, с учетом расположения самих ламп и поправкой на угол расположения ламп относительно объекта, достигались за минимально возможное время. Также, указанные точки будут выбираться таким образом, чтобы перекрестные зоны облучения в помещении 200 не облучались сверх требуемого этой зоне количества полученной энергии УФ-излучения.
[91] В качестве другого примера реализации заявленного решения, рассмотрим построение набора точек дезинфекции для помещения небольшой площади (до 20 м2). имеющего прямоугольную форму, со стандартной высотой стен, и не содержащего перегородок и высоких предметов, таких как шкафы, для достижения требуемой чистоты будет определена точка дезинфекции в центре комнаты с более длительным временем облучения, по сравнению с перемещением по маршруту с непрерывным облучением. Однако, общее время, затраченное на дезинфекцию из одной точки будет меньше времени, потраченного на перемещения устройства и краткосрочного облучения в процессе перемещения. Таким образом, благодаря интеллектуальному выбору точки дезинфекции общее время дезинфекции с сохранением заданных требований чистоты помещения было уменьшено в несколько раз. При испытании настоящего технического решения было установлено что время, затраченное на работу устройства 100 при выполнении дезинфекции помещения указанной площади, уменьшилось на 4 минуты и составило 4 минуты, по сравнению с 8 минутами, затраченными на дезинфекцию этого же помещения по стандартному маршруту.
[92] На основе определенных точек дезинфекции и времени облучения в указанных точках происходит процесс дезинфекции, причем после проведения, модуль управления выполнен с возможностью оценки результатов дезинфекции. Оценка результатов дезинфекции происходит при помощи алгоритма оценки результатов, который учитывает фактическое время проведения обработки; суммарную энергию излучения для каждой поверхности и объем воздушной массы; наличие создающих затенение посторонних объектов в обрабатываемых помещениях; наличие прерываний обработки; разница между запланированными и фактическими параметрами дезинфекции. Результаты оценки дезинфекции могут отображаются в виде цветового градиента каждой зоны помещения на модуле 140 и/или отправляться на графический интерфейс пользовательского устройства.
[93] На фиг. 3 приведен пример результата оценки дезинфекции помещения 200 роботизированным устройством 100. Области 301-302 показывают зоны, которые были обработаны на 99%, а области 303-304 показывают в виде цветового градиента от яркого к темному зоны, которые были обработаны на 95%-80% соответственно.
[94] В частном варианте реализации, цветовой градиент может быть отображен в виде ярко зеленого цвета для зон, где обработка была проведена очень хорошо и в виде затемнения до красного цвета в зонах, где обработка не была проведена по каким-либо причинам.
[95] Так, например, при незапланированной остановке дезинфекции, по ряду факторов (появление человека в помещении, экстренная приостановка и т.д.) и при учете того, что устройству 100 было отведено фиксированное время дезинфекции, указанное устройство 100 не успеет провести дезинфекцию в заданное время и завершит ее по истечению указанного времени. При этом в оценке результатов будут отражены зоны помещения с недостаточным уровнем облучения (в виде цветового градиента на карте помещения).
[96] Стоит также отметить, что на основе оценки результатов дезинфекции может быть запущена повторная дезинфекция, помещения (при такой необходимости). Кроме того, повторная дезинфекция может быть, основана на результатах оценки дезинфекции и построение точек дезинфекции для повторной дезинфекции будет происходить с учетом недостаточно облученных зон, указанных в предыдущем отчете.
[97] Также, для обеспечения коллаборативности, роботизированное устройство 100 выполнено с возможностью обеспечения безопасности человека во время проведения дезинфекции. При обнаружении человека в процессе дезинфекции, устройство 100 выполнено с возможностью приостановки процесса и отключения модуля 130. Обнаружение человека может происходить посредством устройств 150, а также на основе информации, полученной от по меньшей мере внешних датчиков открывания дверей и/или датчиков движения и проникновения, при наличии таковых в помещении. Кроме того, после приостановки дезинфекции устройство 100 выполнено с возможностью звукового оповещения о необходимости покинуть дезинфицируемое помещение. Звуковое оповещение может быть отправлено посредством модуля 140. После ухода человека из дезинфицируемой зоны устройство 100 возобновляет свою работу с того момента, на котором произошла остановка.
[98] Таким образом, в результате применения алгоритмов интеллектуального построения точек дезинфекции и расчета времени облучения в указанных точках, а также алгоритмов обеспечения безопасности человека и оценки результатов дезинфекции было создано новое устройство, обеспечивающее высокую эффективность дезинфекции и минимизацию общего времени, затраченного на такую дезинфекцию.
[99] Теперь рассмотрим один из сценариев работы устройства 100, например, в медицинском центре. Указанная информация приведена в качестве примера и не ограничивает другие варианты реализации указанного решения.
[100] Устройство 100 может располагаться в общем коридоре на определенном этаже, подключенное к зарядной станции. В модуле управления хранится 3D карта помещений (как глобальная карта всего этажа, так и локальная карта конкретных помещений). В зависимости от типа дезинфекции (запланированная дезинфекция, дезинфекция по вызову персоналом), устройство 100 получает команду на дезинфекцию. При запланированной дезинфекции такая команда может быть отправлена в запланированное время в автоматическом режиме, например, сервером. При дезинфекции по вызову персоналом, устройство 100 получает команду на дезинфекцию помещения непосредственно от персонала. Команда на дезинфекцию может содержать по меньшей мере номер кабинета, где требуется провести дезинфекцию или координаты помещения в пространстве. В некоторых вариантах реализации, указанная команда может дополнительно содержать заданную степень чистоты помещения, время дезинфекции, зоны в помещении с повышенными требованиями к чистоте и т.д.
[101] После получения команды на дезинфекцию, устройство 100 на основе 3-х мерной карты перемещается к двери заданного кабинета. Если двери кабинета оборудованы приводными механизмами, то устройство 100 отправит команду на открывание дверей и остановится в начальной точке дезинфекции в помещении. При отсутствии приводных механизмов дверей, устройство 100 подъезжает к требуемой двери и ожидает до тех пор, пока персонал не откроет указанную дверь. Кроме того, по прибытию к требуемой двери устройство 100 подаст звуковой сигнал и отобразит сообщение на экране о прибытии, с помощью модуля 140, как показано на фиг. 4. Для запуска процесса дезинфекции, персонал должен пройти процедуру аутентификации как показано на фиг. 5, подробно описанную выше, после чего подтвердить, что покидает помещение. После аутентификации, устройство 100 также подаст звуковое оповещение о начале работы. В одном варианте осуществления после аутентификации, устройство 100 может начать вести отчет до начала работы через динамики.
[102] Перед началом дезинфекции роботизированное устройство 100, используя оптико-электронные средства 150 и/или устройства акустического анализа проводит сканирование помещения на наличие в нем людей. Если люди отсутствуют в помещении, то устройство 100 начинает дезинфекцию согласно рассчитанным точкам дезинфекции. При наличии людей в помещении, роботизированное устройство 100 повторно оповещает, посредством звукового оповещения, о необходимости покинуть помещении перед началом дезинфекции как показано на фиг. 6.
[103] Длительность процесса дезинфекции, как было указано выше, зависит от параметров помещения и характеристик помещения. По окончанию дезинфекции, устройство 100 оповестит о завершении дезинфекции и направится к точке выезда.
[104] После завершения дезинфекции, устройство 100 оценит результат проведенной дезинфекции. Указанная оценка может быть отображена как в модуле 140 в виде цветовых градиентов (как было показано выше), наложенных на трехмерную карту помещения, так и отправлена на внешнее устройство пользователя.
[105] При завершении дезинфекции помещения и отсутствии других запросов на дезинфекцию помещений, устройство 100 вернется на зарядную станцию и будет ожидать следующую команду на дезинфекцию.
[106] Теперь рассмотрим способ 700 дезинфекции помещений с помощью роботизированного устройства для дезинфекции помещений.
[107] На Фиг. 7 представлены этапы способа дезинфекции помещений. Указанный способ дезинфекции помещений выполняется с помощью устройства дезинфекции помещений, которое было описано выше.
[108] На этапе 701 осуществляется построение карты помещений. Карта может быть построена как с помощью оператора, так и быть загружена из базы данных, располагающейся, например, на сервере. Указанная карта хранится в модуле управления и используется в дальнейшем для построения маршрутов и планирования точек дезинфекции.
[109] Для построения карты с помощью оператора роботизированное устройство 100 под присмотром оператора, двигается по помещению, собирает информацию с оптико-электронных средств 150 и/или устройств акустического анализа и формирует карту, в случае если карта построилась некачественно, оператор переводит роботизированное устройство 100 на ручное управление и исправляет неточности. Карта помещений может содержать общую карту всего здания, включая коридоры и карты конкретных помещений, например, кабинетов.
[110] Карта помещений может быть построена в виде как 2D карты, так и 3D карты. Стоит также отметить, что при построении карты могут быть указаны характеристики зон помещений, которые могут содержать, по меньшей мере, зоны, запретные для проезда; зоны, где обработка проводиться не должна; зоны с пониженным уровнем облучения; зоны с повышенным уровнем облучения. Указанные зоны могут быть заданы также посредством внешнего устройства, например, в мобильном интерфейсе внешнего устройства, веб-интерфейсе и т.д.
[111] На этапе 702 отправляется с помощью внешнего устройства команда на выполнение дезинфекции. На указанном этапе, устройство 100, посредством приемопередающего модуля и/или модуля 140, получает команду на дезинфекцию от персонала и/или внешнего устройства, причем упомянутая команда содержит координаты по меньшей мере одной точки дезинфекции.
[112] Команда на дезинфекцию может содержать тип дезинфицируемого помещения и дополнительные характеристики помещения. Так, например, при вызове устройства 100 в команде на дезинфекцию дополнительно к координатам помещения может быть указан тип помещения (операционная, регистратура, вагон метро и т.д.), также, вместо типа помещения может быть указан диагноз пациента, на основе которого из базы данных будет получен заданный уровень чистоты. Кроме того, команда на дезинфекцию может дополнительно содержать характеристики помещения, включающие по меньшей мере заданное время дезинфекции, приоритетные зоны дезинфекции, минимально допустимый уровень чистоты и т.д.
[113] Для специалиста в данной области техники также очевидно, что под командой на дезинфекцию также может подразумеваться автоматически сгенерированная сервером команда, отправляемая на указанное устройство по таймеру и/или указанное расписание дезинфекции каждого помещения может храниться в модуле управления.
[114] На этапе 703 осуществляется построение точек дезинфекции и вычисление требуемого времени облучения в построенных точках на основе подученной карты помещения и дополнительных характеристик помещения. Модуль управления, на основе полученной карты помещений, при помощи алгоритма построения траектории, определяет точки дезинфекции и требуемое время облучения в указанных точках. Указанные точки выбираются таким образом, чтобы время облучения, которое необходимо сообщить окружающему пространству из этой точки для достижения заданного уровня снижения бактерицидной обсемененности в помещении или определенной зоне помещения (при дезинфекции открытых пространств) было минимально.
[115] Определение точки дезинфекции/набора точек дезинфекции происходит на основе заданных требований чистоты помещения (снижения бактерицидной обсемененности) и карты помещения (3D карта), включающей по меньшей мере габариты помещения, координаты расположения объектов внутри указанного помещения и характеристики помещения. На основе указанных параметров происходит расчет необходимого количества энергии УФ-излучения на единицу площади и объема в соответствии с заданными нормами чистоты, расчет необходимого времени излучения для сообщения заданного количества энергии на поверхности в зависимости от расположения обрабатываемых поверхностей относительно модуля дезинфекции 130 с учетом расстояния, углов наклона и затенений, которые образуются от находящихся в этом помещении предметов. Кроме того, указанный алгоритм также учитывает количество энергии УФ-излучения, сообщаемое в объем воздуха в зависимости от геометрии помещения, его объемов и затенений.
[116] На этапе 704 выполняют дезинфекцию в указанной по меньшей мере одной точке дезинфекции с учетом вычисленного времени облучения.
[117] На основе построенных точек дезинфекции и времени облучения указанное устройство 100 приступает к дезинфекции помещения. Для начала дезинфекции помещения устройство 100, после получения команды на дезинфекцию перемещается к заданному помещению или части помещения (при дезинфекции открытых пространств). Устройство 100 до получения команды на дезинфекцию может находится на зарядной станции, расположенной в заранее заданной точке. При наличии внешних датчиков открывания дверей и запланированной команды дезинфекции устройство 100 в автономном режиме открывает дверь помещения и встает на начальную точку дезинфекции. При отсутствии таких датчиков, устройство 100 ожидает до тех пор, пока дверь в помещение не откроет персонал. После открывания двери, устройство 100 встает на начальную точку дезинфекции. При этом подается звуковой сигнал о готовности к дезинфекции. Далее устройство 100, при помощи средств 150 и/или устройств акустического анализа сканирует помещения на наличие людей. При обнаружении людей, устройство 100 подает звуковой сигнал о необходимости покинуть помещение. После того, как люди покинут помещение, модуль управления подает сигнал на активацию модуля 130 и начинается процесс дезинфекции. Перемещение устройства 100 происходит на основе построенных точек дезинфекции в соответствии с заданным временем облучения.
[118] При получении команды на дезинфекцию от персонала, указанное устройство 100 после перемещения к двери требуемого помещения или части помещения (при дезинфекции открытых пространств) ожидает процесса аутентификации от персонала, и. после подтверждения личности, устройство 100 перемещается на начальную точку дезинфекции.
[119] Процесс дезинфекции происходит в соответствии с определенными точками дезинфекции и временем облучения в указанных точках. После завершения дезинфекции, устройство 100 перемещается обратно на зарядную станцию (если помещение оборудовано датчиками дверей) либо ожидает открытия двери персоналом.
[120] При этом после завершения дезинфекции устройство 100 подает звуковой сигнал о том, что дезинфекция завершена. Сигнал о завершении дезинфекции также может отображаться на экране модуля 140.
[121] В частном варианте осуществления после завершения дезинфекции, модуль управления оценивает результат дезинфекции. Оценка результатов дезинфекции происходит при помощи алгоритма оценки результатов, который учитывает фактическое время проведения обработки; суммарную энергию излучения для каждой поверхности и объем воздушной массы; наличие создающих затенение посторонних объектов в обрабатываемых помещениях; наличие прерываний обработки; разница между запланированными и фактическими параметрами дезинфекции. Результаты оценки дезинфекции могут отображаются в виде цветового градиента каждой зоны помещения на модуле 140 и/или отправляться на графический интерфейс пользовательского устройства.
[122] Таким образом в представленных материалах заявки описаны устройство и способ автономной дезинфекции помещений при помощи роботизированного устройства 100, выполняющего интеллектуальное построение точек дезинфекции и расчета требуемого времени облучения в указанных точках с учетом характеристик помещения, повышающие эффективность дезинфекции.
[123] На Фиг. 8 представлен пример общего вида вычислительного устройства или модуля, которое может представлять модуль управления, модуль 140, контроллер логистической платформы, модуль дезинфекции и т.д.
[124] В общем случае, вычислительное устройство (800) содержит объединенные общей шиной информационного обмена один или несколько процессоров (801), средства памяти, такие как ОЗУ (802) и ПЗУ (803), интерфейсы ввода/вывода (804), устройства ввода/вывода (805), и устройство для сетевого взаимодействия (806).
[125] Процессор (801) (или несколько процессоров, многоядерный процессор и т.п.) может выбираться из ассортимента устройств, широко применяемых в настоящее время, например, таких производителей, как: Intel™, AMD™, Apple™, Samsung Exynos™, MediaTEK™, Qualcomm Snapdragon™ и т.п. Под процессором или одним из используемых процессоров в устройстве (800) также необходимо учитывать графический процессор, например, GPU NVIDIA или Graphcore, тип которых также является пригодным для полного или частичного выполнения исполнения модуля управления, а также может применяться для обучения и применения моделей машинного обучения в различных информационных системах.
[126] ОЗУ (802) представляет собой оперативную память и предназначено для хранения исполняемых процессором (801) машиночитаемых инструкций для выполнения необходимых операций по логической обработке данных. ОЗУ (802), как правило, содержит исполняемые инструкции операционной системы и соответствующих программных компонент (приложения, программные модули и т.п.). При этом, в качестве ОЗУ (802) может выступать доступный объем памяти графической карты или графического процессора.
[127] ПЗУ (803) представляет собой одно или более устройств постоянного хранения данных, например, жесткий диск (HDD), твердотельный накопитель данных (SSD), флэш-память (EEPROM, NAND и т.п.), оптические носители информации (CD-R/RW, DVD-R7RW, BlueRay Disc, MD) и др.
[128] Для организации работы компонентов вычислительного устройства (800) и организации работы внешних подключаемых устройств применяются различные виды интерфейсов В/В (804). Выбор соответствующих интерфейсов зависит от конкретного исполнения вычислительного устройства, которые могут представлять собой, не ограничиваясь: PCI, AGP, PS/2, IrDa, Fire Wire, LPT, COM, SATA, IDE, Lightning, USB (2.0, 3.0. 3.1, micro, mini, type C), TRS/Audio jack (2.5, 3.5, 6.35), HDMI, DVI, VGA, Display Port, RJ45, RS232 и т.п.
[129] Для обеспечения взаимодействия пользователя с вычислительным устройством (800) применяются различные средства (805) В/В информации, например, клавиатура, дисплей (монитор), сенсорный дисплей, тачпад, джойстик, манипулятор мышь, световое перо, стилус, сенсорная панель, трекбол, динамики, микрофон, средства дополненной реальности, оптические сенсоры, планшет, световые индикаторы, проектор, камера, средства биометрической идентификации (сканер сетчатки глаза, сканер отпечатков пальцев, модуль распознавания голоса) и т.п.
[130] Средство сетевого взаимодействия (806) обеспечивает передачу данных посредством внутренней или внешней вычислительной сети, например, Интранет, Интернет, ЛВС и т.п. В качестве одного или более средств (806) может использоваться, но не ограничиваться: Ethernet карта, GSM модем, GPRS модем, LTE модем, 5G модем, модуль спутниковой связи, NFC модуль, Bluetooth и/или BLE модуль, Wi-Fi модуль и др.
[131] Представленные материалы заявки раскрывают предпочтительные примеры реализации технического решения и не должны трактоваться как ограничивающие иные, частные примеры его воплощения, не выходящие за пределы испрашиваемой правовой охраны, которые являются очевидными для специалистов соответствующей области техники.
[132] Модификации и улучшения вышеописанных вариантов осуществления настоящего технического решения будут ясны специалистам в данной области техники. Предшествующее описание представлено только в качестве примера и не несет никаких ограничений для целей осуществления иных частных вариантов воплощения заявленного технического решения, не выходящего за рамки испрашиваемого объема правовой охраны. Конструктивные элементы, такие как микроконтроллеры, блоки, модули и т.д., описанные выше и используемые в данном техническом решении, могут быть реализованы с помощью электронных компонентов, используемых для создания цифровых интегральных схем.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДЕЗИНФЕКЦИИ ТЕКУЧЕЙ СРЕДЫ И ОСВЕЩЕНИЯ | 2001 |
|
RU2209637C1 |
| Устройство дезинфекции поверхностей | 2020 |
|
RU2738856C1 |
| Способ навигации мобильного сервисного робота | 2019 |
|
RU2736559C1 |
| СПОСОБ ДЕЗИНФЕКЦИИ ТЕКУЧЕЙ СРЕДЫ И ОДНОВРЕМЕННОГО ОСВЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2223792C1 |
| СПОСОБ И СИСТЕМА ЗАХВАТА ОБЪЕКТОВ С ПОМОЩЬЮ РОБОТИЗИРОВАННОГО УСТРОЙСТВА | 2020 |
|
RU2745380C1 |
| РОБОТИЗИРОВАННАЯ МОДУЛЬНАЯ ТЕЛЕЖКА | 2023 |
|
RU2800784C1 |
| Система для управления допуском на массовые мероприятия на закрытых площадках при пандемии COVID-19 | 2023 |
|
RU2809090C1 |
| СПОСОБ И СИСТЕМА ВЫЯВЛЕНИЯ ТРЕВОЖНЫХ СОБЫТИЙ ПРИ ВЗАИМОДЕЙСТВИИ С УСТРОЙСТВОМ САМООБСЛУЖИВАНИЯ | 2019 |
|
RU2713876C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ПО АВТОМАТИЗАЦИИ СКЛАДСКОЙ ЛОГИСТИКИ ПРЕДПРИЯТИЙ | 2023 |
|
RU2822722C1 |
| СПОСОБ И СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ С ПОМОЩЬЮ АВТОМАТИЗИРОВАННЫХ УСТРОЙСТВ | 2021 |
|
RU2785769C1 |
Группа изобретений относится к медицине, а именно к роботизированным устройствам для дезинфекции помещений. Устройство содержит логистическую платформу, корпус, жестко прикрепленный к логистической платформе, модуль дезинфекции, модуль человеко-машинного взаимодействия, оптико-электронное устройство и модуль управления. Логистическая платформа выполнена с возможностью перемещения роботизированного устройства. Модуль дезинфекции содержит по меньшей мере одну УФ-лампу, обеспечивающую дезинфекционную обработку. Модуль человеко-машинного взаимодействия выполнен с возможностью идентификации пользователя и установки режима работы роботизированного устройства. Модуль управления выполнен с возможностью построения карты помещений, сбора и обработки информации с оптико-электронного устройства, построения набора точек дезинфекции в помещении на основе полученной карты помещений, вычисления времени облучения в каждой построенной точке и формирования данных для передачи модулю дезинфекции на основе построенного набора точек дезинфекции и вычисленного времени облучения. Точки дезинфекции и время облучения в каждой построенной точке определяются на основании: характеристик помещения, полученных с помощью карты помещений; объема воздушной массы в помещении, определенной на основе характеристик помещения; текущего расположения объектов в указанном помещении; заданной степени облучения помещения. Достигается повышение эффективности дезинфекции помещения за счет интеллектуального определения точек дезинфекции и времени облучения. 2 н. и 27 з.п. ф-лы, 8 ил.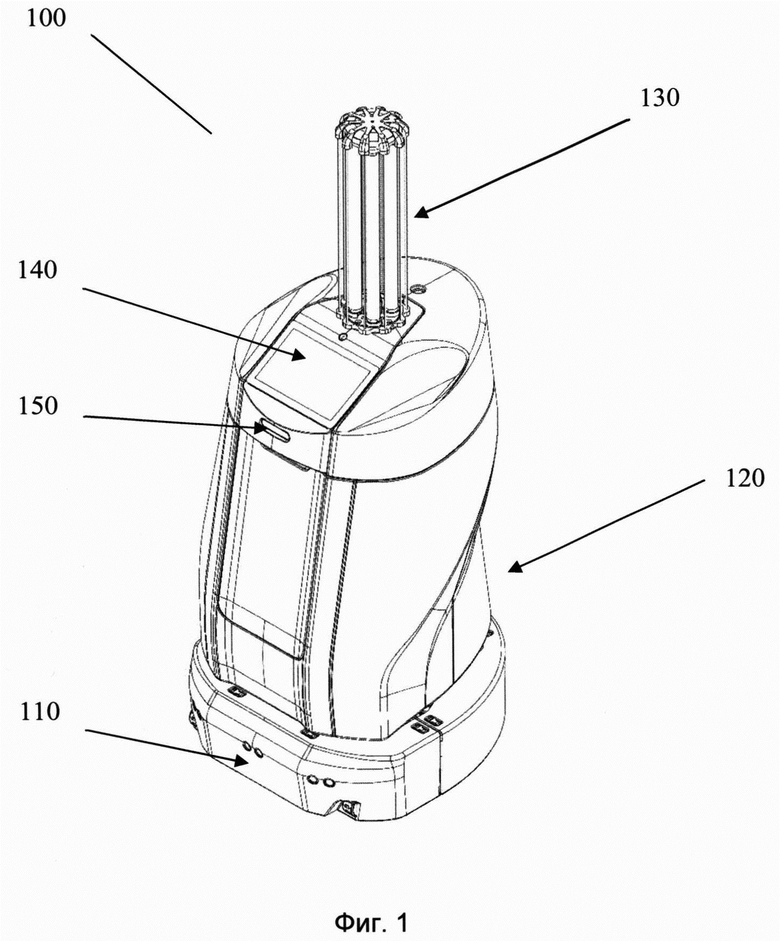
1. Роботизированное устройство для дезинфекции помещений, содержащее:
• логистическую платформу, выполненную с возможностью перемещения роботизированного устройства;
• корпус, жестко прикрепленный к логистической платформе, содержащий:
• модуль дезинфекции, содержащий по меньшей мере одну УФ-лампу, обеспечивающую дезинфекционную обработку;
• модуль человеко-машинного взаимодействия, выполненный с возможностью идентификации пользователя и установки режима работы роботизированного устройства,
• по меньшей мере одно оптико-электронное устройство,
• модуль управления, выполненный с возможностью:
 построения карты помещений;
построения карты помещений;
сбора и обработки информации с по меньшей мере одного оптико-электронного устройства;
построения набора точек дезинфекции в помещении, на основе полученной карты помещений;
вычисления времени облучения в каждой построенной точке;
формирования данных для передачи модулю дезинфекции на основе построенного набора точек дезинфекции и вычисленного времени облучения;
причем точки дезинфекции и время облучения в каждой построенной точке определяются на основании:
характеристик помещения, полученных с помощью карты помещений;
объема воздушной массы в помещении, определенной на основе характеристик помещения;
текущего расположения объектов в указанном помещении;
заданной степени облучения помещения.
2. Роботизированное устройство по п. 1, характеризующееся тем, что дополнительно содержит приемо-передающий модуль.
3. Роботизированное устройство по п. 1, характеризующееся тем, что логистическая платформа дополнительно содержит разъем для подключения зарядной станции.
4. Роботизированное устройство по п. 1, характеризующееся тем, что логистическая платформа включает по меньшей мере колеса, редукторы, двигатели, контроллеры двигателей.
5. Роботизированное устройство по п. 1, характеризующееся тем, что оптико-электронное устройство выбирается из группы: лазерный дальномер, камера, камера глубины.
6. Роботизированное устройство по п. 1, характеризующееся тем, что дополнительно содержит устройство акустического анализа, выбираемого из группы: ультразвуковой датчик, ультразвуковой дальномер, сонар.
7. Роботизированное устройство по п. 1, характеризующееся тем, что модуль человеко-машинного взаимодействия содержит по меньшей мере: экран, динамик, микрофонный массив.
8. Роботизированное устройство по п. 7, характеризующееся тем, что экран выполняется сенсорным.
9. Роботизированное устройство по п. 7, характеризующееся тем, что дополнительно содержит по меньшей мере один орган управления, выбираемый из группы: клавиатура, сенсорная клавиатура, джойстик, тачпад.
10. Роботизированное устройство по п. 1, характеризующееся тем, что при построении карты помещений учитываются характеристики зон помещений.
11. Роботизированное устройство по п. 10, характеризующееся тем, что характеристики зон помещений представляют собой по меньшей мере одно из:
• зона, запретная для перемещения роботизированного устройства;
• зона, не предназначенная для осуществления дезинфекции;
• зона с заданной степенью облучения с помощью УФ-лампы.
12. Роботизированное устройство по п. 1, характеризующееся тем, что модуль управления выполнен с возможностью построения 3D-карты помещений.
13. Роботизированное устройство по п. 1, характеризующееся тем, что модуль управления дополнительно выполнен с возможностью оценки результатов дезинфекции.
14. Роботизированное устройство по п. 13, характеризующееся тем, что результат дезинфекции оценивается на основе следующих критериев:
• фактическое время проведения обработки;
• суммарная энергия излучения для каждой поверхности и объем воздушной массы;
• наличие создающих затенение посторонних объектов в обрабатываемых помещениях;
• наличие прерываний обработки;
• разница между запланированными и фактическими параметрами дезинфекции.
15. Роботизированное устройство по п. 13, характеризующееся тем, что результаты оценки дезинфекции дополнительно отображаются в виде цветового градиента каждой зоны помещения.
16. Роботизированное устройство по п. 1, характеризующееся тем, что модуль управления дополнительно выполнен с возможностью выявления человека в дезинфицируемом помещении, на основе информации, полученной от по меньшей мере одного оптико-электронного устройства.
17. Роботизированное устройство по п. 1, характеризующееся тем, что модуль управления дополнительно выполнен с возможностью выявления человека в дезинфицируемом помещении на основе информации, полученной от по меньшей мере внешних датчиков открывания дверей и/или датчиков движения и проникновения, установленных в помещении.
18. Роботизированное устройство по любому из пп. 16-17, характеризующееся тем, что при выявлении человека в дезинфицируемом помещении происходит отключение модуля дезинфекции.
19. Роботизированное устройство по п. 18, характеризующееся тем, что при выявлении человека дополнительно подается сигнал, посредством модуля человеко-машинного взаимодействия, о необходимости покинуть помещение.
20. Способ дезинфекции помещений, выполняемый роботизированным устройством для дезинфекции помещений по любому из пп. 1-19, включающий этапы, на которых:
• строят карту помещений, в которых требуется провести дезинфекцию;
• отправляют с помощью внешнего устройства команду на выполнение дезинфекции, причем упомянутая команда содержит координаты по меньшей мере одной точки дезинфекции;
• строят точки дезинфекции и вычисляют требуемое время облучения в построенных точках на основе построенной карты помещений, причем точки дезинфекции и время облучения в каждой построенной точке определяются на основании:
характеристик помещения, полученных с помощью карты помещений;
объема воздушной массы в помещении, определенной на основе характеристик помещения;
текущего расположения объектов в указанном помещении;
заданной степени облучения помещения;
• выполняют дезинфекцию в указанной по меньшей мере одной точке дезинфекции с учетом вычисленного времени облучения.
21. Способ по п. 20, характеризующийся тем, что при построении карты помещений учитываются характеристики зон помещений.
22. Способ по п. 21, характеризующийся тем, что характеристики зон помещений представляют собой по меньшей мере одно из:
• зона, запретная для перемещения роботизированного устройства;
• зона, не предназначенная для осуществления дезинфекции;
• зона с заданной степенью облучения с помощью УФ-лампы.
23. Способ по п. 20, характеризующийся тем, что дополнительно содержит этап оценки результатов дезинфекции.
24. Способ по п. 23, характеризующийся тем, что результат дезинфекции оценивается на основе следующих критериев:
• фактическое время проведения обработки;
• суммарная энергия излучения для каждой поверхности и объем воздушной массы;
• наличие создающих затенение посторонних объектов в обрабатываемых помещениях;
• наличие прерываний обработки;
• разница между запланированными и фактическими параметрами дезинфекции.
25. Способ по п. 23, характеризующийся тем, что результаты оценки дезинфекции дополнительно отображаются в виде цветового градиента каждой зоны помещения.
26. Способ по п. 20, характеризующийся тем, что дополнительно содержит этап выявления человека в дезинфицируемом помещении, на основе информации, полученной от по меньшей мере одного оптико-электронного устройства.
27. Способ по п. 20, характеризующийся тем, что дополнительно содержит этап выявления человека в дезинфицируемом помещении на основе информации, полученной от по меньшей мере внешних датчиков открывания дверей и/или датчиков движения и проникновения, установленных в помещении.
28. Способ по любому из пп. 26-27, характеризующийся тем, что при выявлении человека в дезинфицируемом помещении происходит отключение модуля дезинфекции.
29. Способ по п. 28, характеризующийся тем, что при выявлении человека дополнительно подается сигнал, посредством модуля человеко-машинного взаимодействия, о необходимости покинуть помещение.
| KR 101724447 B1, 11.04.2017 | |||
| БАКТЕРИЦИДНЫЙ ОБЛУЧАТЕЛЬ | 2013 |
|
RU2560665C2 |
| US 2012282135 A1, 08.11.2012 | |||
| US 2002085947 A1, 04.07.2002 | |||
| WO 2020151920 A1, 30.07.2020 | |||
| WO 2017147460 A1, 31.08.2017 | |||
| CN 110585455 A, 20.12.2019 | |||
| WO 2015189615 A1, 17.12.2015 | |||
| US 2013243647 A1, 19.09.2013. | |||

