ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к автоматизированным устройствам, используемым в области промышленного производства, при этом оно было разработано в частности в связи с проблемой взаимодействия между человеком-оператором и таким автоматизированным устройством. Изобретение предпочтительно может применяться в области робототехники, однако оно также может быть предпочтительно реализовано на других устройствах, используемых в области промышленного производства.
УРОВЕНЬ ТЕХНИКИ
Для эффективного использования вклада автоматизации в производственные процессы и, таким образом, повышения эффективности последних, необходимо сделать взаимодействие между человеком-оператором и автоматизированными устройствами, в частности роботом, естественным и безопасным. Таким образом, человеку-оператору могут быть доверены те процессы, которые требуют чрезмерно сложной автоматизации, тогда как операции, требующие, например, значительных усилий, быстроты выполнения, высокой точности и качества, могут быть доверены автоматизированным устройствам.
Для обеспечения возможности этих производственных процедур, необходимы решения, которые делают взаимодействие человека с автоматизированными устройствами естественным и безопасным. Подходы, применяемые в настоящее время для этой цели, как правило, связаны с вопросами пассивной и активной безопасности.
В частности, в отношении промышленных роботов, способы, связанные с повышением пассивной безопасности при взаимодействии между человеком-оператором и манипулятором робота, как правило, направлены на изменение конструкции и работы последнего с целью уменьшения вероятности несчастных случаев и их серьезности. Согласно этому подходу, например, были предложены манипуляторы робота, которые отличаются легкими конструкциями, покрыты мягкими материалами без острых углов или краев, для сведения к минимуму вреда, причиняемого любым возможным воздействием на человека-оператора.
Вместо этого, способы, связанные с повышением активной безопасности, относятся к стратегиям управления, основанным на специальной сенсорной системе, направленной на обеспечение постоянного мониторинга окружающей среды, окружающей манипулятор робота, чтобы динамически изменять его поведение в случае потенциально опасных ситуаций, таких как приближение человека-оператора к манипулятору или контакт между оператором и манипулятором в течение выполнения заданной функции. В настоящее время для этой цели в основном используются следующие типы сенсоров:
сенсоры, предназначенные для оптического восстановления геометрии окружающей среды, окружающей манипулятор, такие как видеокамеры и лазерные сканеры;
- электрические сенсоры, предназначенные для распознавания контакта или удара между манипулятором и человеком-оператором, такие как сенсоры усилия или контактные сенсоры; и
- электрические сенсоры, предназначенные для распознавания чрезмерного сближения между манипулятором и человеком-оператором, например бесконтактные сенсоры.
Были предложены роботы, в которых эти две стратегии пассивной и активной безопасности включены в покрытие или покровный слой со встроенными сенсорами соответствующего манипулятора. Эти покрытия в целом состоят из своего рода "кожи", предпочтительно выполненной из упруго податливого материала, окружающего соответствующую часть манипулятора и включающего в себя контактные сенсоры или бесконтактные сенсоры.
Установка упомянутых известных покрытий на подвижную конструкцию манипулятора в целом сложна и далека от практической реализации. Кроме того, соответствующее удаление или замена покрытия или его частей в случае случайных неисправностей является трудоемким. Дополнительно интеграция и калибровка сенсорных средств в покрытии часто являются сложными и дорогостоящими. Сходные проблемы также встречаются в автоматизированных устройствах с подвижными частями, отличными от роботов, используемыми в области промышленного производства.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения в целом является создание автоматизированного промышленного устройства, в частности робота, имеющего покрытие со встроенными сенсорами, которое по существу не имеет упомянутых выше недостатков, хотя оно может обеспечить высокую степень взаимодействия между устройством и человеком-оператором, в то же время гарантируя выполнение необходимых требований безопасности. Согласно другому аспекту задачей настоящего изобретения является создание автоматизированного промышленного устройства, в котором рабочие состояния или условия соответствующего покрытия со встроенными сенсорами могут быть легко обнаружены.
Указанные выше и другие задачи, которые будут ясно изложены ниже в данном документе, решаются согласно настоящему изобретению с помощью автоматизированного промышленного устройства и с помощью покрытия со встроенными сенсорами для автоматизированного промышленного устройства, обладающих характеристиками, указанные в прилагаемой формуле изобретения.
Формула изобретения является неотъемлемой частью технического описания, представленного в настоящем документе в отношении изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные задачи, характеристики и преимущества настоящего изобретения будут ясны из приведенного ниже описания и прилагаемых чертежей, представленных исключительно в качестве поясняющего и не ограничивающего примера, на которых:
- Фиг. 1 - частичный схематичный вид в аксонометрии автоматизированного устройства согласно возможным вариантам осуществления изобретения;
- Фиг. 2 - схематический вид в аксонометрии части устройства с фиг. 1, с покрытием со встроенными сенсорами согласно возможным вариантам осуществления изобретения;
- Фиг. 3 - частично покомпонентный вид части устройства с фиг. 2;
- Фиг. 4 и 5 - схематические виды в аксонометрии двух модулей покрытия со встроенными сенсорами, которые могут быть использованы в автоматизированном устройстве, согласно возможным вариантам осуществления, соответственно, в состоянии, в котором они отделены, и в состоянии, в котором они соединены вместе;
- Фиг. 6 - схематический вид в поперечном разрезе возможной слоистой конфигурации покрывающего модуля покрытия со встроенными сенсорами согласно возможным вариантам осуществления изобретения;
- Фиг. 7 - схематический покомпонентный вид контактного сенсорного устройства, которое может быть использовано в покрывающем модуле покрытия со встроенными сенсорами согласно возможным вариантам осуществления изобретения;
- Фиг. 8 - частичное схематическое изображение в поперечном разрезе, предназначенное для иллюстрации двух разных состояний контактного сенсорного устройства типа, показанного на фиг. 7;
- Фиг. 9 - частичный схематический вид возможной конфигурации электрического соединения некоторых покрывающих модулей покрытия со встроенными сенсорами согласно возможным вариантам осуществления изобретения;
- Фиг. 10 - схематический вид в аксонометрии другого автоматизированного устройства согласно возможным вариантам осуществления;
- Фиг. 11 - частично покомпонентный схематический вид устройства с фиг. 10 без покрывающего модуля;
- Фиг. 12 - схематический вид в аксонометрии другого автоматизированного устройства согласно возможным вариантам осуществления изобретения;
- Фиг. 13 - схематический вид в аксонометрии устройства с фиг. 12 без покрывающего модуля;
- Фиг. 14 - схематический вид в аксонометрии другого автоматизированного устройства согласно возможным вариантам осуществления изобретения; и
- Фиг. 15, 16, 17 - схематические изображения, предназначенные для указания возможных условий работы покрытия со встроенными сенсорами согласно возможным вариантам осуществления изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Указание на "вариант осуществления" или "один вариант осуществления" в рамках данного описания предназначено для обозначения того, что конкретная конфигурация, конструкция или характеристика, описанные в отношении этого варианта осуществления, содержатся по меньшей мере в одном варианте осуществления. Таким образом, характеристики, описанные с указанием на "вариант осуществления", "один вариант осуществления", "по меньшей мере один вариант осуществления", "один или более вариантов осуществления" и т.п., в различных частях в этом описании, не обязательно все относятся к одному и тому же варианту осуществления. Кроме того, конкретные конфигурации, конструкции или характеристики могут быть объединены любым подходящим способом в одном или более вариантов осуществления. Используемые ниже ссылки приведены лишь для удобства и не определяют объем правовой охраны или объем вариантов осуществления.
Кроме того, следует отметить, что ниже в настоящем описании автоматизированные устройства, в отношении которых в качестве примера приведены возможные варианты осуществления изобретения, описываются ограниченно элементами, достаточными для понимания изобретения.
На фиг. 1 схематически показано автоматизированное устройство для использования в промышленном производстве в соответствии с возможными вариантами осуществления изобретения. В показанном примере устройство представляет собой робот, содержащий манипулятор 1 с набором степеней свободы, имеющий подвижную конструкцию 2, которая включает в себя множество частей, соединенных вместе, а также исполнительные средства, которыми могут управлять для обеспечения смещения указанных частей конструкции 2.
В показанном примере робот является антропоморфным роботом с шестью степенями свободы, имеющим неподвижное основание 3 и колонну 4, установленную на основании 3 с возможностью поворота вокруг первой оси А1 с вертикальным направлением. Номером позиции 5 обозначена рука, установленная на колонне 4 с возможностью колебаний вокруг второй оси А2 с горизонтальным направлением. Номером позиции 6 обозначен локтевой шарнир, установленный на руке 5 для поворота вокруг третьей оси A3, которая также имеет горизонтальное направление, причем локтевой шарнир 6 поддерживает предплечье 7, выполненное с возможностью поворота вокруг своей собственной оси А4, составляющей, таким образом, четвертую ось перемещения манипулятора 1. Предплечье 7 имеет на своем конце запястье 8, установленное для перемещения в соответствии с двумя осями А5 и А6. Запястье 8 имеет фланец 9 для установки рабочего органа (не показан). Рабочий орган может представлять собой устройство для подхвата стандартного компонента, например, типа, показанного на фиг. 10, или полировальное или шлифовальное устройство, например, типа, представленного на фиг. 12. Упомянутый выше рабочий орган в любом случае может быть любого типа и обладать любой функциональностью, известной в этой области; например, он может представлять собой сварочную горелку или зажим, пистолет-краскораспылитель или пистолет для нанесения герметика, сверлильный шпиндель и т.д.
Подвижные части 4-8 соединены вместе посредством сочленений известного типа, с которыми связаны соответствующие электрические двигатели, некоторые из которых обозначены буквой М, с соответствующей понижающей передачей. В одном или более вариантов осуществления рабочий орган, связанный с фланцем 9, также имеет соответствующие исполнительные средства, в соответствии с известным способом. Предпочтительно с упомянутыми выше сочленениями, т.е. с соответствующими двигателями М, связаны соответствующие преобразователи (не показаны), например, типа кодового сенсора или сенсора положения, для управления положением.
Перемещения манипулятора 1, т.е. работа двигателей сочленений, управляются управляющим блоком 15 робота, предпочтительно расположенным в положении, удаленном от манипулятора 1, и соединенным с электрическими/электронными частями последнего через выводы системы 16 проводки. Способы практической реализации аппаратных средств и программного обеспечения в отношении блока 15, содержащего соответствующую микропроцессорную управляющую систему, не имеют отношения к целям настоящего описания, за исключением некоторых конкретных функций, упоминаемых ниже, которые относятся к возможным вариантам осуществления изобретения.
В одном или более вариантов осуществления изобретения управляющий блок 15 выполнен с возможностью управления манипулятором 1 во множестве различных рабочих режимов, включающих в себя по меньшей мере автоматический рабочий режим, а также предпочтительно ручной рабочий режим. Для этой цели блок 15 содержит устройство 17 выбора, которое может быть использовано пользователем для выбора требуемого рабочего режима из возможных режимов. По меньшей мере в одном варианте осуществления робот может работать по меньшей мере в режиме "программирования", в "автоматическом" режиме и предпочтительно в "дистанционном" режиме. На фиг. 1 номер позиции 17 обозначает, таким образом, устройство для ручного выбора требуемого рабочего режима из возможных режимов. В режиме "программирования" оператор действует вблизи манипулятора для управления его работой, сохранения этапов программы и программирования рабочей операции, например, с помощью переносного устройства программирования (пульта обучения) или ручного направляющего устройства, связанного с подвижной конструкцией манипулятора 1, в частности, вблизи его рабочего органа. Вместо этого, в "автоматическом" режиме робот выполняет предварительно записанную в память собственную рабочую программу, возможно в комбинации с другими роботами или автоматизированным установками, и возможно взаимодействует с человеком-оператором для выполнения конкретной задачи. В "дистанционном" режиме робот также выполняет свою собственную рабочую программу внутри производственной ячейки, возможно взаимодействуя с человеком-оператором, однако в этом случае запуск выполнения программы поступает от супервизора ячейки, такого как программируемый логический контроллер (PLC), который, например, управляет как роботом, так и другими автоматизированными установками, имеющимися в той же самой ячейке.
На фиг. 1 манипулятор 1 схематично показан в "голом" виде для пояснения возможной конфигурации его подвижной конструкции 4-8. Однако в практических вариантах осуществления изобретения указанная подвижная конструкция покрыта по меньшей мере частично покрытием со встроенными сенсорами, показанным на фиг. 2, 3, где оно обозначено в целом номером позиции 20. В одном или более вариантов осуществления, таком как показанный на чертеже, покрытие 20 покрывает по меньшей мере частично также неподвижную конструкцию манипулятора 1, представленную здесь его основанием 3.
Покрытие 20 включает в себя сенсорные средства, которые могут иметь по меньшей мере одно контактное сенсорное устройство, пригодное для обнаружения контакта или удара между манипулятором 1 и инородным телом, и/или по меньшей мере одно бесконтактное сенсорное устройство, пригодное для обнаружения присутствия инородного тела в пределах по существу заданного расстояния от манипулятора, например, от приблизительно 0 см до 5 см, предпочтительно от 0 до приблизительно 3 см. В различных предпочтительных вариантах осуществления покрытие включает в себя как по меньшей мере одно контактное сенсорное устройство, так и по меньшей мере одно бесконтактное сенсорное устройство. Если в своих предпочтительных применениях робот является роботом коллаборативного типа, то упомянутое выше инородное тело обычно представляет собой человека-оператора, который работает в жестком контакте с манипулятором 1.
Покрытие 20 со встроенными сенсорами содержит множество покрывающих модулей, некоторые из которых обозначены номерами позиций 21-39 только на фиг. 2, которые могут быть размещены вместе или собраны с образованием в целом своего рода тела, покрывающего по меньшей мере часть подвижной конструкции манипулятора 1, предпочтительно, но необязательно практически всю подвижную конструкцию 4-8 манипулятора.
Как более ясно изложено ниже, по меньшей мере некоторые из модулей 21-39 покрытия 20 имеют соответствующую несущую нагрузку конструкцию, имеющую заданную форму, с которой связан по меньшей мере один слой из упруго сжимаемого материала, т.е. материала, выполненного с возможностью поглощения удара. В предпочтительных вариантах осуществления несущая нагрузку конструкция каждого модуля выполнена из жесткого или полужесткого материала, так что указанная конструкция может быть выполнена с требуемой заданной формой, меняющейся в зависимости от той части манипулятора 1 (или другого автоматизированного устройства), которая должна быть покрыта.
Множество модулей 21-39 содержит один или более покрывающих модулей со встроенными сенсорами, каждый из которых имеет соответствующие сенсорные средства, например, контактные сенсорные средства и/или бесконтактные сенсорные средства. Ниже в настоящем описании в качестве примера приведен возможный вариант осуществления упомянутых модулей со встроенными сенсорами со ссылкой на модули, обозначенные номерами позиций 23 и 24, в предположении, что концепции, описанные в отношении упомянутых модулей, могут быть применены также к другим модулям со встроенными сенсорами, например, к модулям, обозначенным номерами позиций 25-26, 28-29, 31-32, 36-37, 38-39 (очевидно, за исключением разной общей формы упомянутых модулей, которая определяется соответствующей несущей нагрузку конструкцией).
В предпочтительных вариантах осуществления модули со встроенными сенсорами содержат как по меньшей мере одно контактное сенсорное устройство, так и по меньшей мере одно бесконтактное сенсорное устройство. С другой стороны, из объема изобретения не исключается случай, когда по меньшей мере один из модулей покрытия 20 содержит только контактное сенсорное устройство или только бесконтактное сенсорное устройство. Покрытие 20 также может содержать модули без сенсорных устройств упомянутого типа, например, в областях манипулятора 1, для которых невелики риски или последствия, связанные с возможным ударом с человеком-оператором: например, покрывающие модули 21-22 основания 3 манипулятора 1 могут быть без сенсорных устройств или могут иметь только бесконтактные сенсорные устройства, в связи с тем, что основание 3 в любом случае является неподвижной частью манипулятора. Сходные соображения могут быть применены к модулям, связанным с подвижными частями манипулятора 1, например, к модулю 33.
В различных вариантах осуществления по меньшей мере некоторые из модулей покрытия выполнены для фиксации с возможностью отсоединения на соответствующих нижележащих частях подвижной конструкции 4-8, такие как модули 23, 25 и 36, 37 на фиг. 2. Для этой цели указанные выше нижележащие части манипулятора 1 имеют специально предусмотренные установочные и/или крепежные элементы для соответствующих покрывающих модулей. Указанные элементы могут быть образованы непосредственно телом частей манипулятора или могут быть выполнены в виде элементов, нанесенных на эти части.
Как показано, например, на фиг. 1, номером позиции 18а обозначены, например, два кронштейна для крепления модулей 23 и 25 на фиг. 2, номером позиции 18b обозначен установочный и/или опорный элемент для модуля 23, при этом номером позиции 18 с обозначен кронштейн для крепления модуля 34 на фиг. 2.
В различных вариантах осуществления фиксация модулей на упомянутых установочных и/или крепежных элементах обеспечивается с помощью дополнительных элементов механического соединения. Например, на фиг. 3, где модуль 24 является отдельным от модулей 23 и 26, частично показан элемент 19 для механического соединения модуля 23 с крепежным элементом 18а колонны 4 манипулятора 1. С другой стороны в возможных вариантах осуществления сама несущая нагрузку конструкция модулей, которые должны быть закреплены на частях манипулятора 1, - которая выполнена, например, из пластикового или композиционного материала, - может быть выполнена с такой формой, что она непосредственно образует по меньшей мере часть элементов, необходимых для механического соединения и/или сцепления с конструкцией 2 манипулятора 1.
В одном или более предпочтительных вариантах осуществления один или более первых покрывающих модулей - например, модули 23 и 25 - закреплены с возможностью отсоединения на соответствующих частях подвижной конструкции (колонна 4 со ссылкой на приведенные в качестве примера модули 23 и 25), в частности, с помощью быстроразъемных соединительных средств, например элементов с защелкивающимися или быстроразъемными зацепными устройствами.
В одном или более вариантов осуществления один или более вторых покрывающих модулей - например, модули 24 и 26 - закреплены с возможностью отсоединения на одном или более из упомянутых первых модулей и/или закреплены с возможностью отсоединения попарно, в частности посредством быстроразъемных устройств, например, элементов с защелкивающимися или быстроразъемными зацепными устройствами. Например, модули 24 и 26 могут быть соединены с возможностью отсоединения соответственно с модулями 23 и 25, которые, в свою очередь, соединены с возможностью отсоединения с конструкцией манипулятора. Кроме того, как будет более ясно изложено ниже, сами модули 24 и 26 соединены вместе с возможностью отсоединения.
Как упомянуто выше, предпочтительно средства для соединения с возможностью отсоединения покрывающих модулей относительно друг друга и/или относительно подвижной конструкции манипулятора содержат быстроразъемные устройства, такие как разъемные зажимы с защелкивающимся действием или быстроразъемным зацеплением. С другой стороны, в альтернативных вариантах осуществления фиксация с возможностью отсоединения одного или более модулей относительно конструкции 2 и/или относительно друг друга может быть получена с использованием резьбовых элементов, таких как винты и т.п.
В одном или более вариантов осуществления используются модули покрытия 20, имеющие по меньшей мере одну соответствующую электронную управляющую плату, не обязательно закрепленную на соответствующей несущей нагрузку конструкции. Указанная управляющая плата соединена с возможностью передачи сигналов с управляющим блоком 15 манипулятора 1, с которым электрически соединены сенсорные средства по меньшей мере одного соответствующего покрывающего модуля со встроенными сенсорами.
Указанная управляющая плата предпочтительно выполнена с возможностью управления по меньшей мере работой сенсорных средств и подачи в управляющий блок 15 сигналов, указывающих на контакт между манипулятором 1 и человеком-оператором (или другим инородным телом), и/или сигналов, указывающих на присутствие человека-оператора (или другого инородного тела) в пределах по существу заданного расстояния от самого манипулятора. Как упомянуто выше, в возможных вариантах осуществления по меньшей мере один из модулей со встроенными сенсорами содержит контактные сенсорные средства и бесконтактные сенсорные средства, так что соответствующая управляющая плата может подавать в управляющий блок 15 сигналы, указывающие на оба упомянутых условия, т.е. сигналы, указывающие на контакт, и сигналы, указывающие на близость.
Каждый покрывающий модуль со встроенными сенсорами может быть связан со своей собственной управляющей платой или один и тот же покрывающий модуль со встроенными сенсорами может быть связан с множеством управляющих плат, например, с первой платой, выполненной для управления контактными сенсорными средствами упомянутого модуля, и второй платой, выполненной для управления бесконтактными сенсорными средствами того же покрывающего модуля со встроенными сенсорами. Также может быть использовано множество модулей со встроенными сенсорами, связанных с одной и той же управляющей платой, которая может управлять как сенсорными средствами, соответствующими первому модулю, так и сенсорными средствами по меньшей мере одного второго модуля. Кроме того, согласно той же логике, по меньшей мере одна управляющая плата может быть расположена в покрывающем модуле без встроенных сенсоров, с которым соединены сенсорные средства по меньшей мере одного модуля со встроенными сенсорами. Таким образом, понятно, что один или более модулей покрытия, даже если они имеют свои собственные контактные сенсорные средства и/или бесконтактные сенсорные средства, не обязательно должны быть оснащены соответствующей управляющей платой. С этой точки зрения сенсорные средства одного или более модулей со встроенными сенсорами без платы также могут быть непосредственно соединены с управляющим блоком 15, в котором могут быть непосредственно реализованы функции соответствующей платы.
Как указано выше, в предпочтительных вариантах осуществления одна и та же электронная управляющая плата выполнена для соединения и управления множеством модулей со встроенными сенсорами покрытия 20, даже более чем двумя модулями. Упомянутая одна и та же управляющая плата не обязательно должна быть расположена в одном из модулей покрытия, поскольку она может быть связана с конструкцией манипулятора, даже в положении, находящемся относительно далеко от управляемых модулей со встроенными сенсорами.
На фиг. 4, 5 показаны, посредством примера, два покрывающих модуля со встроенными сенсорами, соответствующие модулям 23, 24 с фиг. 2-3. На упомянутых чертежах видна внутренняя сторона упомянутых модулей, т.е. сторона, по существу обращенная к нижележащей подвижной конструкции манипулятора 1 (здесь фактически колонна 4, см. фиг. 1).
На упомянутых чертежах видна несущая нагрузку конструкция упомянутых модулей, обозначенная в целом номером позиции 40, которая предпочтительно выполнена из электроизоляционного материала. Как будет более ясно изложено ниже, в предпочтительных вариантах осуществления модули покрытия 20 имеют в целом конструкцию с отдельными слоями, которая включает в себя:
по меньшей мере один несущий нагрузку слой 400, предпочтительно выполненный из жесткого или полужесткого материала, необходимый для придания модулю требуемой заданной формы;
по меньшей мере один слой сжимаемого материала, выполненный с возможностью поглощения возможного удара; и предпочтительно
по меньшей мере один внешний покровный слой.
В одном или более вариантов осуществления модули со встроенными сенсорами содержат один или более отдельных активных слоев, соответствующих используемым сенсорным средствам, и один или более отдельных пассивных слоев, соответствующих конструктивной или несущей нагрузку части модуля, его упруго сжимаемой части, и его внешнему покровному слою. Несущий нагрузку слой 400 покрывающего модуля выполнен с возможностью поддержки упомянутых отдельных активных и пассивных слоев.
Несущие нагрузку конструкции 40 модулей по существу выполнены в форме оболочек, имеющих форму, воспроизводящую форму соответствующих частей манипулятора 1, т.е. охватывающую ее или частично покрывающую ее, чтобы обеспечить по существу однородную поверхность для поддержки упомянутых активных и пассивных слоев, а также в целом для покрытия 20.
Несущие нагрузку конструкции 40 предпочтительно выполнены с такой формой, что между их внутренней стороной и нижележащими частями манипулятора 1 образован свободный зазор, достаточный для размещения, например, управляющей электроники покрывающих модулей и/или соответствующей проводки и/или возможно выступающих элементов упомянутых покрытых частей манипулятора, а также других возможных элементов, например, элементов для принудительной вентиляции, таких как вентиляторы. Разумеется, по упомянутым причинам несущие нагрузку конструкции 40 различных покрывающих модулей могут отличаться друг от друга в зависимости от области манипулятора, которая должна быть покрыта. В различных вариантах осуществления несущая нагрузку конструкция 40, которая в качестве примера может иметь толщину от 2 до 30 мм, выполнена из армированного стекловолокном пластика или другого композитного материала и, таким образом, может быть легко получена с помощью оборудования известной концепции. Однако из объема изобретения не исключается использование термопластичных или термореактивных материалов и/или формование несущих нагрузку конструкций 40 с помощью термоформования или других известных технологий, например трехмерной печати. Сама несущая нагрузку конструкция 40 может быть многослойного типа, например, содержать два более жестких внешних слоя и по меньшей мере один менее жесткий промежуточный слой. В различных вариантах осуществления толщина конструкции является переменной, т.е. не постоянной; например, несущая нагрузку конструкция 40 модуля может быть более толстой в своих частях, предназначенных для механического соединения с конструкцией робота и/или с другими модулями, и менее толстой в других частях, например, предназначенных для обеспечения подложки для активного и пассивного слоев покрытия.
Как показано на фиг. 4 и 5, можно отметить, что в одном или более предпочтительных вариантов осуществления, несущие нагрузку конструкции 40 по существу выполнены с формой, наподобие формованной оболочки, предпочтительно образуя более или менее выраженную выпуклость или полость, внутренняя сторона которой может иметь ребра жесткости, некоторые из которых обозначены номером позиции 41. Управляющие платы модулей, если это предусмотрено, могут быть фиксированы на внутренней стороне соответствующей несущей нагрузку конструкции 40: однако это не является существенной характеристикой, поскольку платы могут быть установлены на конструкции манипулятора 1. Как указано выше, в предпочтительных вариантах осуществления одна или более управляющих плат модулей со встроенными сенсорами - как в случае управляющих плат, используемых для управления одним модулем, так и в случае управляющих плат, используемых для управления множеством модулей, - установлены на несущей нагрузку конструкции манипулятора 1 даже в положении, удаленном от соответствующего управляемого модуля со встроенными сенсорами. В не ограничивающем показанном примере оба модуля 23 и 24 имеют соответствующие управляющие платы, обозначенные номером позиции 50 и показанные схематично. Фиксация плат 50 на несущих нагрузку конструкциях 40 или на несущей нагрузку конструкции манипулятора 1 может быть выполнена согласно известному способу, например, посредством резьбовых элементов или путем использования кронштейнов или посадочных поверхностей для зацепления плат 50 с защелкиванием.
Номером позиции 51 обозначена система проводки, состоящая из множества выводов, для соединения плат 50 с сенсорными средствами соответствующего модуля, которые могут содержать контактные сенсоры или бесконтактные сенсоры, или комбинацию контактных сенсоров и бесконтактных сенсоров. Если упомянутые сенсоры расположены за внешней стороной несущих нагрузку конструкций 40 (не видны на фиг. 4-5), то последние могут иметь отверстия для прохода проводки 51 или ее выводов.
В различных вариантах осуществления несущая нагрузку конструкция 40 по меньшей мере некоторых модулей имеет связанные механические соединительные элементы для механического соединения вместе по меньшей мере двух покрывающих модулей с возможностью отсоединения. В предпочтительных вариантах осуществления упомянутые механические соединительные элементы относятся к типу быстроразъемного соединения, например, с быстроразъемным зацеплением.
Как показано на фиг. 4, в предпочтительных вариантах осуществления несущая нагрузку конструкция 40 первого модуля - в этом примере модуля 23 - имеет по меньшей мере одну периферийную поверхность или стенку 42, выполненную для установки с обращением к соответствующей периферийной поверхности или стенке 42 второго смежного модуля - в этом примере модуля 24, при этом упомянутые обращенные друг к другу поверхности или стенки образуют или имеют соответствующие упомянутые соединительные элементы для механического соединения, обозначенные номерами позиций 45 и 46. В этом примере соединительные элементы 45 по существу относятся к охватываемому типу, тогда как соединительные элементы 46 по существу относятся к охватывающему типу. Механические соединители указанного типа могут быть расположены также на модулях, не оснащенных сенсорными средствами.
В различных вариантах осуществления (не показаны) несущая нагрузку конструкция 40 по меньшей мере некоторых модулей имеет связанные электрические соединительные элементы для электрического соединения вместе двух покрывающих модулей, или соответствующей проводки, с возможностью отсоединения. Упомянутые электрические соединительные элементы также могут по существу относиться к охватываемому и охватывающему типу. Если это предусматривается, электрические соединительные элементы могут быть связаны с обращенными друг к другу стенками 42 двух модулей, подлежащих электрическому соединению вместе, например, с модулями 23, 24, предпочтительно дополнительно, но, возможно, также в качестве альтернативы, с механическими соединительными элементами 45, 46. В этой связи следует отметить, что упомянутые электрические соединительные элементы могут быть выполнены для осуществления функций упомянутых механических соединительных элементов и наоборот.
Очевидно, что несущая нагрузку конструкция 40 модуля - также без сенсорных средств - может иметь ряд поверхностей или стенок, выполненных так, чтобы быть обращенными к соответствующим поверхностям или стенкам смежных модулей, причем указанные обращенные друг к другу стенки имеют связанные соответствующие механические соединительные элементы и/или электрические соединительные элементы. На фиг. 4 фактически показан случай, когда несущая нагрузку конструкция 40 модуля 24 имеет поверхность или стенку 43 (в этом случае в целом поперечную или перпендикулярную к стенке 42 самого модуля), содержащую механические соединительные элементы 45, выполненные с возможностью соединения с соответствующими дополнительными механическими соединительными элементами, расположенными на поверхности или стенке модуля 26 и обозначенными номером позиции 43 на фиг. 3. Дополнительно или альтернативно на стенках 43 модулей 23, 26 могут быть расположены электрические соединительные средства указанного выше типа. Очевидно, также может быть использовано множество механических соединительных элементов и/или электрических соединительных элементов на той же самой стенке 42 или на нескольких стенках 42, 43 первого модуля, которые выполнены с возможностью разъемного соединения с дополнительными механическими соединительными элементами и/или электрическими соединительными элементами, расположенными на соответствующих стенках вторых модулей, смежных с первыми модулями.
На фиг. 4 номером позиции 52 обозначена проводка для электрического соединения управляющей платы 50 с управляющим блоком 15 на фиг. 1. Несущая нагрузку конструкция 40 модулей может быть выполнена с такой формой, что она образует на ее периферийной стенке по меньшей мере один проход для направления проводки, как показано, например, для модуля 23 по отношению к соответствующей проводке 53, 54.
Как можно видеть из фиг. 4, форма, по существу в виде оболочки, в целом вогнутая или выпуклая, несущих нагрузку конструкций 40 обеспечивает, если это требуется, эффективное размещение управляющих плат 50, если они установлены на внутренней стороне самих конструкций или на конструкции манипулятора 1, и всех проводок 51-52, причем последние предпочтительно также могут быть локально закреплены на внутренней стороне несущих нагрузку конструкций 40, например, с помощью клейких лент или подходящих коробов для кабелей.
На фиг. 5 модули 23 и 24 показаны в соединенном состоянии, т.е. с соответствующими стенками 42 с фиг. 4, находящимися в контакте или смежно друг с другом, и с механическими соединительными элементами 45, 46, соединенными вместе. Как показано на упомянутом чертеже, предполагается, что концы проводки 52 электрически присоединены к управляющему блоку 15 с фиг. 1, с некоторыми выводами указанной проводки, которые используются управляющим блоком 15 для обеспечения необходимого электрического питания (предпочтительно низковольтное питание) для управляющих плат 50, и другими выводами указанных проводок, которые вместо этого используются управляющими платами 50 для подачи в управляющий блок 15 сигналов, указывающих на обнаружения, производимые сенсорными средствами, т.е. указывающих на контакт или удар между манипулятором 1 и человеком-оператором (или другим инородным телом) и/или присутствие человека-оператора (или другого инородного тела) вблизи самого манипулятора.
Таким образом, благодаря этим независимым электрическим соединениям различные покрывающие модули 20 - в данном случае показанные в качестве примера модули 23 и 24 - могут работать независимо друг от друга, даже в случае отказа одного из модулей. Подход этого типа, очевидно, допускает различные возможные конфигурации покрытия 20, которое может содержать модули со встроенными сенсорами, по существу покрывающие всю подвижную конструкцию манипулятора 1 или только ту его часть, которая считается критически важной в контексте взаимодействия с человеком-оператором, в соответствии с конечным применением робота или другого автоматизированного устройства.
Также понятно, что управляющий блок 15 может быть выполнен с возможностью идентификации управляющей платы 50 модуля со встроенными сенсорами, подающего один из упомянутых представляющих сигналов, при этом сам управляющий блок 15, который, таким образом, распознает упомянутый модуль, соответствующий области манипулятора, в которой произошел контакт и/или была обнаружена близость оператора или другого инородного тела, с тем чтобы предпринять необходимые действия. Конечно, это применимо также в случае электронной платы 50, выполненной для управления множеством модулей со встроенными сенсорами. Другими словами, электронная плата 50 такого типа может быть удобно выполнена для идентификации, какой из управляемых модулей со встроенными сенсорами сгенерировал сигнал, и для передачи соответствующей информации в управляющий блок 15.
Например, если бесконтактные сенсорные средства выполнены с возможностью обнаружения присутствия инородного тела на максимальном расстоянии, составляющем приблизительно 5 см, то после обнаружения, выполненного с помощью упомянутых сенсорных средств, управляющий блок может выдать команду на уменьшение скорости смещения манипулятора 1 до значения, считающегося безопасным для человека-оператора, например, от 150 до 250 мм/с.
Сходные стратегии могут быть реализованы после контакта, вызванного человеком-оператором, с манипулятором. Например, предположим, что после уменьшения скорости, вызванного предыдущим сигналом, генерированным бесконтактными сенсорными средствами, человек-оператор перемещается непредвиденным образом и случайно сталкивается с поверхностью модуля со встроенными сенсорами. Вслед за последующим сигналом, генерированным соответствующими контактными сенсорными средствами, управляющий блок 15 может остановить перемещение манипулятора 1 или наоборот изменить направление его перемещения. Следует отметить, что контакт, осуществленный оператором на покрытии со встроенными сенсорами, также может быть намеренным, например, когда сам оператор хочет остановить работу робота.
Тот факт, что управляющий блок 15 может идентифицировать модуль со встроенными сенсорами, от которого поступают сигналы контакта и/или близости, может позволить использовать стратегии управления, направленные на повышение безопасности человека-оператора, в частности для координации перемещения множества частей подвижной конструкции 2. Например, со ссылкой на фиг. 2 предположим, что контакт обнаруживается с помощью модуля 39, когда предплечье (7, фиг. 1) манипулятора 1 расположено в положении наклона вниз. Возможная стратегия управления может, таким образом, предусматривать, что управляющий блок 15 может подать команду как на поднятие упомянутого предплечья, так и на одновременное колебание назад (как показано на фиг. 1) руки 5. Очевидно, что это только не ограничивающий пример, при условии, что возможные комбинации перемещений бесчисленны.
Следует понимать, что в одном или более вариантов осуществления управляющий блок 15 может быть выполнен с возможностью, посредством разработки соответствующей программы, использования покрывающих модулей со встроенными сенсорами в качестве своего рода "пользовательского интерфейса", направленного на обеспечение возможности человеку-оператору передавать основные инструкции в управляющий блок 15.
Как упомянуто выше, единичный контакт с модулем со встроенными сенсорами может считаться показателем ситуации, являющейся потенциально опасной для человека-оператора, после чего реализуются стратегии безопасности. С другой стороны, например, три контакта на модуле со встроенными сенсорами, которые происходят в быстрой последовательности (которые оператор также может совершать пальцем одной руки), могут указывать на желание со стороны оператора временно остановить манипулятор, без необходимости со стороны робота реализовать какую-либо стратегию безопасности. Исходя из указанного условия управляемой приостановки, последующая последовательность контактов на модуле - например, два или четыре контакта в быстрой последовательности - может указывать на намерение оператора возобновить работу манипулятора.
В различных вариантах осуществления смежные модули покрытия 20 со встроенными сенсорами не имеют механических соединительных элементов и электрических соединительных элементов упомянутого выше типа. Обычно это относится к модулям, которые, хотя они и расположены довольно близко друг к другу, покрывают части манипулятора 1, которые могут выполнять относительное перемещение.
Как показано на фиг. 2, понятно, например, что модуль 23, с одной стороны, и модуль 28 (или 29), с другой стороны, соответственно частично покрывают колонну 4 и рычаг 5 манипулятора 1 (см. фиг. 1), т.е. те части манипулятора, которые могут выполнять относительные смещения. Таким образом, между указанными модулями 23 и 28 не расположено никаких соединительных элементов взаимного соединения, ни механических, ни электрических. Конечно, соображения этого типа также применимы к другим модулям покрытия 20 со встроенными сенсорами, таким как, - как показано на фиг. 2 - модули 23 или 25 и 29, модули 29 и 30, модули 38-39, с одной стороны, и модули 36-37 с другой, или снова модули 30, 31, 34, 35, с одной стороны, и модули 36-37 - с другой стороны (модули 36-37 фиксированы относительно предплечья 7 и, таким образом, могут поворачиваться с ним относительно модулей 30, 31, 34, 35, покрывающих локтевой шарнир 6 на фиг. 1).
Как упомянуто выше, в предпочтительных вариантах осуществления по меньшей мере модули со встроенными сенсорами покрытия 20 содержат множество активных слоев и пассивных слоев, расположенных на несущей нагрузку конструкции 40.
На фиг. 6 показана, только лишь в качестве не ограничивающего пояснения, возможная конструкция с отдельными слоями модуля со встроенными сенсорами, который в данном случае, как предполагается, является модулем 24 на фиг. 4 и 5. На указанных чертежах для большей ясности опущено изображение проводки электрического соединения.
В предпочтительных вариантах осуществления, с внешней стороной несущего нагрузку слоя 400 покрывающего модуля связан демпфирующий слой, выполненный из упруго сжимаемого и предпочтительно электроизоляционного материала, например, из эластомерного материала, который выполнен для поглощения кинетической энергии, получаемой при ударе с рассматриваемым модулем. Демпфирующий слой, такой как слой, обозначенный номером позиции 60 в примере на фиг. 6, может быть выполнен из пенополимера, например вспененного полиуретана. Этот слой 60 может иметь толщину от 5 до 20 мм, предпочтительно от 8 до 13 мм. Например, демпфирующий слой 60 может быть использован для поглощения удара с передаваемой силой в соответствии с действующими в настоящее время стандартами, например, стандарты ISO 10218-1, -2 и TS 15066.
Следует отметить, что в различных предпочтительных вариантах осуществления внешняя сторона несущего нагрузку слоя 400, с которой должны быть связаны различные активный и/или пассивный слои соответствующего покрытия, выполнена с такой формой, что внешняя поверхность является ровной и правильной, насколько это возможно, например, плоская поверхность, или цилиндрическая поверхность, или коническая поверхность. Поверхности этого типа облегчают нанесение различных активных и/или пассивных слоев на указанный слой, предотвращая, например, образование складок или морщин, которые могут отрицательно влиять на качество работы некоторых активных слоев, таких как электропроводящий слой, принадлежащий бесконтактному сенсору или контактному сенсору.
В одном или более вариантов осуществления на верхней стороне демпфирующего слоя 60 модуля со встроенными сенсорами расположены контактные сенсорные средства.
Контактные сенсорные средства в целом могут относиться к любому известному типу. В предпочтительных вариантах осуществления изобретения контактные сенсорные средства относятся к относительно гибкому типу и расположены так, что они проходят по области, по существу соответствующей области внешней поверхности рассматриваемого модуля или ее преобладающей части. В не ограничивающем примере, показанном на фиг. 6, контактное сенсорное устройство в целом обозначено как С и само имеет конструкцию с различными расположенными друг на друге слоями.
В одном или более вариантов осуществления контактное сенсорное устройство С содержит промежуточный электроизоляционный слой 62, расположенный между нижним электропроводящим слоем 61 и верхним электропроводящим слоем 63, с которыми соединены соответствующие проводники, обозначенные как "+" и Промежуточный электроизоляционный слой 62 предпочтительно выполнен из эластомера или в любом случае упруго сжимаемого материала, такого как вспененный материал, и имеет множество сквозных отверстий. Каждый из слоев 61, 63 предпочтительно содержит ткань, выполненную из, по меньшей мере частично, электропроводящего материала или материала, которому придана электропроводность. В качестве примера, слои 61, 63 могут, например, каждый содержать ткань, выполненную из покрытого медью полиэфира, возможно покрытого никелем, или ткань, выполненную из посеребренного нейлона. Для слоев 61, 63 также могут быть использованы две разные электропроводящие ткани, например, двух типов, указанных выше, которые отличаются различными механическими характеристиками. Например, для слоя 61, который должен быть фиксирован относительно демпфирующего слоя 60, может быть предпочтительно использована по существу неупругая проводящая ткань, тогда как для слоя 63, который подвергается большей деформации после удара, чтобы войти в контакт со слоем 61 (как объясняется ниже), может быть предпочтительно использована по существу упругая, предпочтительно биэластичная, проводящая ткань.
В целом, предпочтительно, если слои 61, 63 имеют очень низкое поверхностное электрическое сопротивление, например, не больше 100 мОм.
Слои или ткани 61-63 являются относительно тонкими (например, общая толщина расположенных друг на друге слоев 61-63 не превышает 5-6 мм) и, таким образом, являются гибкими по своей природе так, что они могут быть адаптированы к нижележащему профилю демпфирующего слоя 60, который, в свою очередь, зависит от профиля нижележащего несущего нагрузку слоя 400. Промежуточный электроизоляционный слой 62 толще слоев 61, 63, и, хотя он сжимаем, жестче, чем они. Промежуточный электроизоляционный слой 62 может, например, иметь толщину от 2 до 4 мм, тогда как слои 61, 63 могут иметь толщину, например, от 0,10 до 0,30 мм.
Промежуточный электроизоляционный слой 62 имеет, как указано выше, набор отверстий или сквозных отверстий. Со ссылкой на не ограничивающий пример на фиг. 7, указанные отверстия, обозначенные как 62а, проходят по основной части промежуточного электроизоляционного слоя 62. Таким образом, как можно видеть, электропроводящий слой 61 и электропроводящий слой 63 локально обращены друг к другу на отверстиях 62а. Также можно видеть, что слой 63 следовательно может вступать в контакт со слоем 61 на по меньшей мере одном таком сквозном отверстии 62а, после деформации слоя 63 и промежуточного электроизоляционного слоя 62.
Отверстия 62а предпочтительно являются круглыми, чтобы гарантировать большую однородность, но это не является существенной характеристикой. Например, диаметр отверстий 62а составляет от 10 до 20 мм, а их шаг (т.е. расстояние друг от друга) составляет от 3 до 8 мм.
Как схематически показано на фиг. 8а, в отсутствие давления на сенсорное устройство С промежуточный электроизоляционный слой 62 удерживает проводящие слои 61, 63 на расстоянии друг от друга, также в областях отверстий 62а, вызывая через проводники "+" и "-" электрический сигнал, который соответствующая управляющая плата 50 может интерпретировать как отсутствие удара на рассматриваемом модуле со встроенными сенсорами. С другой стороны, как схематически показано на фиг. 8b, при наличии удара, т.е. давления, на сенсорном устройстве С, промежуточный электроизоляционный слой 62 может подвергаться упругой деформации и обеспечивать контакт между слоями 61, 63 на по меньшей мере одном из своих сквозных отверстий 62а. Таким образом, достигается непосредственная электрическая проводимость между двумя слоями 61, 63 с последующим изменением упомянутого электрического сигнала через проводники "+" и которое соответствующая электронная плата 50 может интерпретировать как соответствующее удару, который произошел на модуле со встроенными сенсорами.
Непосредственный контакт слоя 63 на слое 61 на одном или более отверстий 62а, т.е. переключение сенсора С, допускается деформацией самого слоя 63 и промежуточного электроизоляционного слоя 62 и зависит от степени удара на покрытии 20. Другими словами, порог переключения сенсора С зависит от деформации слоев, лежащих над самим сенсором. Толщина или, в более общем случае, характеристики сопротивления деформации упомянутых вышележащих слоев, таким образом, выбираются так, что переключение сенсора С может происходить в случае, когда соответствующий покрывающий модуль вовлечен в удар, происходящий с кинетической энергией, большей по существу заданного порога безопасности. Упомянутый порог предпочтительно выбирается так, чтобы предотвратить серьезные риски для безопасности человека-оператора в случае удара с рассматриваемым модулем. Например, упомянутый порог, -который представляет собой предельную силу удара, - может составлять от 60 Н до 200 Н. В случае, когда необходимо обеспечить максимальную защиту, например, для защиты лица оператора от возможного вреда, порог безопасности может составлять от 50 Н до 100 Н.
Таким образом, как можно видеть, в разных предпочтительных вариантах осуществления контактное сенсорное устройство С работает, по существу, как сенсор типа ВКЛ/ВЫКЛ, без необходимости устанавливать, для целей обнаружения присутствия или отсутствия удара, конкретные пороговые значения электрического сопротивления, как это обычно бывает в случае контактных сенсоров пьезоэлектрического типа. Кроме того, даже несмотря на то, что сенсор С имеет обширную чувствительную поверхность, его стоимость изготовления значительно ограничена, например, по сравнению с упомянутыми пьезоэлектрическими сенсорами, с дополнительным преимуществом, гарантирующим повторяемость обнаружения. Работа сенсора С не зависит от предварительной нагрузки, приложенной к его электропроводящим слоям 61 и 63 в течение изготовления модуля со встроенными сенсорами (в отличие, например, от пьезорезистивных тканей, используемых в пьезоэлектрических сенсорах, в которых в соответствии с изменениями механического напряжения растяжения применяется изменение функциональных характеристик).
В различных предпочтительных вариантах осуществления контактное сенсорное устройство С имеет по меньшей мере два резистора, из которых первый резистор соединен между двумя проводящими слоями 61 и 63, а второй резистор соединен, в частности последовательно, с проводником "+" или с проводником причем указанные резисторы, в частности, используются для обеспечения возможности различения возможных условий неисправности устройства С. Со ссылкой на случай, показанный на фиг. 6 и 7, указанный первый резистор обозначен как Rp, тогда как указанный второй резистор обозначен как Rs. Эти два резисторы предпочтительно имеют разные значения электрического сопротивления (например, резистор Rs может иметь значение приблизительно одну десятую от значения сопротивления Rp).
Чтобы пояснить этот аспект более полно, в качестве примера предполагается, что резистор Rp имеет значение сопротивления, составляющее от 3000 до 5000 Ом, при этом резистор Rs имеет значение, составляющее от 300 до 500 Ом.
В отсутствие удара или давления на устройство С, т.е. состояние, соответствующее условию, показанному на фиг. 8а, через проводники "+" и "-" с помощью соответствующей управляющей платы 50 будет обнаружено значение сопротивления, равное Rp+Rs. С другой стороны, при наличии удара или давления на устройство С, т.е. состояние, соответствующее условию, показанному на фиг. 8b, через проводники "+" и "-" с помощью соответствующей управляющей платы 50 будет обнаружено значение сопротивления, равное значению только резистора Rs. Как упомянуто выше, управляющая плата 50, таким образом, сможет различать два условия (наличие или отсутствие удара) на основе различного значения обнаруженного сопротивления. В случае, когда вместо этого плата 50 обнаруживает бесконечное значение сопротивления или, в любом случае, значение, намного превышающее нормальный рабочий диапазон (3300-5500 Ом, в указанном не ограничивающем примере), рабочая неисправность будет присутствовать, например, вследствие разрыва одного из двух проводников "+" и "-" или вследствие нежелательного отсоединения проводника, с которым соединены проводники, от дополнительного проводника, расположенного управляющей на плате 50. Если, вместо этого, плата 50 обнаруживает нулевое значение сопротивления или, в любом случае, значение, намного меньшее, чем нормальный рабочий диапазон (3300-5500 Ом, в указанном не ограничивающем примере), будет присутствовать другая рабочая ошибка, обычно из-за короткого замыкания между самими проводниками "+" и "-" или соответствующего проводника.
В предпочтительных вариантах осуществления контактные сенсорные средства покрывающего модуля со встроенными сенсорами, например, сенсорное устройство С, приведенное выше в качестве примера, могут быть установлены между нижним покрывающим слоем и верхним покрывающим слоем, которые выполнены из упруго сжимаемого и электроизоляционного материала. Со ссылкой на не ограничивающий пример на фиг. 6, указанный нижний покрывающий слой имеет демпфирующий слой 60, тогда как верхний покрывающий слой имеет дополнительный демпфирующий слой, обозначенный номером позиции 64, предпочтительно выполненные из электроизоляционного и упруго сжимаемого материала. В различных вариантах осуществления слой 64 по существу такой же - в отношении материала и размеров - как и демпфирующий слой 60.
Когда к демпфирующему слою 64 прикладывается нагрузка, например, после удара между рассматриваемым покрывающим модулем и человеком-оператором, по меньшей мере сжимаемый материал слоя 64 подвергается деформации, определяя, таким образом, давление на слои 61-63 и активируя при этом контактный сенсор С, как объяснено выше.
Как упомянуто выше, в одном или более вариантов осуществления один или более модулей со встроенными сенсорами содержат бесконтактные сенсорные средства. Когда модуль со встроенными сенсорами содержит как контактные сенсорные средства, так и бесконтактные сенсорные средства, последние находятся в более высоком положении, чем первые, т.е. в более внешнем положении по отношению к несущему нагрузку слою 400, который представляет собой самый внутренний слой покрывающего модуля. С другой стороны, из объема изобретения не исключается обратное расположение, т.е. с контактными сенсорными средствами в положении выше, чем бесконтактные сенсорные средства.
В случае модулей со встроенными сенсорами, содержащих вместо этого только бесконтактные сенсорные средства, слои 61-64 с фиг. 6 могут быть опущены, возможно, с соответствующим увеличением толщины демпфирующего слоя 60.
Бесконтактные сенсорные средства могут относиться к любому известному типу, однако также предпочтительно к относительно гибкому типу и выполнены так, что они имеют область поверхности, по существу соответствующую области внешней поверхности рассматриваемого модуля или его преобладающей части. В не ограничивающем примере на фиг. 6 бесконтактное сенсорное устройство обозначено в целом как Р.
В одном или более вариантов осуществления бесконтактное сенсорное устройство Р относится к емкостному типу и содержит слой электропроводящего материала. Со ссылкой на не ограничивающий пример на фиг. 6, упомянутый электропроводящий, чувствительный или активный слой для целей обнаружения близости обозначен номером позиции 65.
Предпочтительно слой 65 содержит ткань, выполненную из электропроводящего материала или выполненную такой, например, в виде ткани, выполненной из полиэфира с медным покрытием, возможно покрытой никелем, или в виде ткани, выполненной из нейлона с серебряным покрытием.
В не ограничивающем примере на фиг. 6 электропроводящий слой 65 установлен наверху демпфирующего слоя 64.
В возможном практическом варианте осуществления в бесконтактном сенсорном устройстве Р проводящий слой 65, используемый в качестве емкостного сенсора, соединен с микросхемой емкостного детектирования на основе индуктивно-емкостной цепи (LC-цепь, такая как микросхема FDC2214, изготавливаемая Texas Instrument Incorporated, США), расположенной на управляющей плате 50 для сбора и обработки данных (см. справочные данные упомянутой выше микросхемы и соответствующую документацию по приложению). В принципе, когда человек-оператор (или другое инородное тело) приближается к проводящему слою 65, происходит изменение емкости в LC-цепи и последующее изменение частоты колебаний. Измерение этого изменения частоты, выполняемое этой микросхемой, указывает, таким образом, на близость человека-оператора (или другого инородного тела) к слою 65, т.е. к внешней стороне покрытия со встроенными сенсорами. Как упомянуто выше, сенсорные средства Р могут быть выполнены таким образом, что максимальное расстояние от слоя 65, в пределах которого может быть обнаружено присутствие инородного тела, составляет приблизительно 5 см. С другой стороны, следует понимать, что, например, на основании упомянутого изменения емкости в LC-цепи и последующего изменения частоты колебаний, также может быть установлено множество порогов обнаружения с помощью бесконтактного сенсорного устройства Р, которые соответствуют разным расстояниям инородного тела от внешней стороны покрытия со встроенными сенсорами (например, первый порог РТ1, соответствующий расстоянию 3 см от самой внешней поверхности покрытия и по существу нулевому расстоянию от указанной внешней поверхности).
В различных вариантах осуществления указанные бесконтактные сенсорные средства представляет собой дополнительный демпфирующий слой, предпочтительно имеющий толщину, меньшую толщины слоев 60 и/или 64. Со ссылкой на фиг. 6, таким образом, на чувствительном слое 65 расположен указанный дополнительный демпфирующий слой, обозначенный как 66, который выполнен из электроизоляционного и упруго сжимаемого материала. Этот слой 66 предпочтительно выполнен из эластомерного материала, такого как вспененный материал, например, имеющего толщину от 2 до 4 мм.
Предпочтительно каждый модуль содержит внешний покровный слой, предпочтительно выполненный из электроизоляционного материала. Со ссылкой на не ограничивающий пример на фиг. 6, внешний покровный слой, обозначенный номером позиции 67, может быть образован краской, предпочтительно краской на основе полиуретана, нанесенной на внешнюю сторону слоя 66. Для этой цели в предпочтительных вариантах осуществления на упомянутой внешней стороне слоя 66 может быть предварительно нанесена грунтовка, предназначенная для облегчения адгезии окрашенного слоя 67. В случае модулей со встроенными сенсорами, содержащих только контактные сенсорные средства С, покровный слой 67 может быть нанесен на демпфирующий слой 64 (который, возможно, предварительно был снабжен грунтовкой). Покровный слой 67 может иметь толщину, составляющую от 0,5 до 1,5 мм, при этом не исключается большая его толщина при условии, что гарантируется гибкость или упруго пластичность этого слоя.
В различных вариантах осуществления, покровный слой 67 также проходит на периферийных сторонах несущей нагрузку конструкции 40, образованной слоями 400, 60-66, в частности до несущего нагрузку слоя 400, например, до внутренней стороны и/или до стенок типа, обозначенного номерами позиций 42-43 на фиг. 4-5: однако, это не является существенной характеристикой. Как указано выше, фактически покровный слой предпочтительно образован соответствующей краской, предпочтительно краской, не являющейся электропроводящей, которая покрывает самую внешнюю сторону многослойной конструкции модуля.
На фиг. 6 также схематично изображена управляющая плата 50 модуля 24, а также устройство для принудительной вентиляции, обозначенное номером позиции 70, например, содержащее вентилятор, приводимый в действие электрическим двигателем.
В различных вариантах осуществления один или более вентиляторов 70 могут быть установлены на частях конструкции манипулятора 1, покрытого покрытием 20, причем указанные части содержат подходящие опоры, выполненные для этой цели. С другой стороны, согласно другим вариантам осуществления, вентиляторы могут быть установлены на внутренней стороне несущей нагрузку конструкции 40 одного или более модулей, необязательно модулей со встроенными сенсорами. Наличие этих средств принудительной вентиляции способствует циркуляции воздуха внутри полостей, образованных покрытием 20, например, для облегчения охлаждения компонентов, заключенных внутри указанного покрытия (таких как платы 50 или двигатели М сочленений манипулятора 1). Для обеспечения возможности циркуляции охлаждающего воздуха (т.е. всасывание воздуха извне и выталкивание более горячего воздуха наружу) один или более модулей покрытия 20 могут иметь проходы, например, в виде набора прорезей, как схематически показано пунктирной линией на фиг. 2.
Работа вентиляционного устройства 70 может управляться управляющей платой 50 модуля со встроенными сенсорами или управляющей платой 50, с которой соединены множество модулей со встроенными сенсорами. Для этой цели в возможных вариантах осуществления такая плата 50 предпочтительно имеет сенсор температуры (например, типа NTC (отрицательный температурный коэффициент), чтобы активировать вентиляционное устройство, когда температура воздуха, обнаруженная в пределах области, ограниченной покрытием 20, достигает или превышает заданный порог.
В различных вариантах осуществления для целей изготовления модуля со встроенными сенсорами, такого как модуль 24 с фиг. 6, различные слои собираются с помощью клеев или адгезивов, выполненных для сохранения сцепления слоев друг к другу и предотвращения любого возможного скольжения этих слоев после контакта или удара.
Как упомянуто выше, базовый слой, представленный несущим нагрузку слоем 400, используется с формой, определенной на стадии проектирования, причем эта форма может меняться в зависимости от области покрываемого манипулятора.
Затем устанавливается демпфирующий слой 60 на соответствующий несущий нагрузку слой 400 и фиксируется на нем посредством клея. Для этой цели слой 60 имеет такие форму и размеры, чтобы воспроизвести по меньшей мере форму и размер внешней стороны несущего нагрузку слоя 400, чтобы покрыть его целиком или практически целиком. Слой 60 может, например, быть вырезан или штампован из листа используемого материала. Кроме того, слои 61-63 и слои 64-66 выполняют с необходимыми формами и размерами, например, посредством вырезания или штамповки, затем их склеивают вместе. Слои 61-63 последовательно склеивают на демпфирующем слое 60, причем демпфирующий слой 64 затем приклеивают на слой 63. Слои 61-64 собирают вместе, например, в показанном на фиг. 6 порядке, предпочтительно с использованием одного или более клеев, имеющих уменьшенную адгезионную способность, или в любом случае адгезионную способность, меньшую адгезионной способности клея или клеев, используемых для фиксации слоя 60 на слое 400, причем задача заключается не в том, чтобы изменить упругость активных слоев 61, 63, но получить при этом устойчивый сенсор. Нанесение клеев между слоями 61-63 выполняется, конечно, так, чтобы не изолировать электрически указанные слои друг от друга. Следует отметить, что, вместо использования добавленного клея, один или более слоев 61 и 63 уже могут быть предварительно выполнены на стадии изготовления так, что они имеют поверхность с нанесенным клеем, снабженную соответствующей снимаемой пленкой.
Кроме того, дополнительный активный слой 65 и соответствующий верхний пассивный слой 66 также имеют формы и размеры, необходимые для покрытия области, по существу соответствующей внешней поверхности покрывающего модуля или его преобладающей части. Слои 65 и 66 затем последовательно наклеивают на слой 64, в этом случае также предпочтительно с использованием клеев с пониженными характеристиками адгезии по причинам, объясненным выше в отношении слоев 61-64 (слой 65 также может быть выполнен уже на стадии изготовления так, что он имеет поверхность с нанесенным клеем, снабженную соответствующей снимаемой пленкой). Наконец, наносят внешний покровный слой 67, который, как упомянуто выше, может быть нанесен в виде краски, возможно, после нанесения грунтовки на слой 66.
Слоистая конструкция, описанная со ссылкой на фиг. 6, конечно, может быть использована для получения всех модулей со встроенными сенсорами покрытия 20. Как упомянуто выше, последовательность и/или количество слоев модуля - независимо от того, со встроенными ли он сенсорами или нет - могут даже отличаться от описанного и проиллюстрированного в качестве примера.
На фиг. 9 схематично показан возможный способ соединения некоторых модулей со встроенными сенсорами, таких как модули 23-24 с фиг. 4-5 и модули 28-29 с фиг. 2. Как упомянуто выше, в реализациях этого типа используется проводка 51 для соединения сенсорных средств С и/или Р различных модулей с управляющими платами 50 и проводка 52 для соединения различных плат 50 с управляющим блоком 15, причем указанная проводка 51, 52 имеет выводы для переноса электрического питания от блока 15 к платам 50 и, таким образом, к соответствующим сенсорным средствам С и/или Р, и для переноса от плат 50 к блоку 15 сигналов, соответствующих обнаружениям, выполненным сенсорными средствами С и/или Р. Конечно, конфигурации электрического соединения покрывающих модулей с управляющим блоком 15 могут быть многочисленными, согласно принятому конструктивному подходу. На фиг. 9 показан как случай отдельных модулей со встроенными сенсорами, - здесь модулей 28 и 29 - каждый из которых имеет собственную электронную управляющую плату 50, так и случай нескольких модулей со встроенными сенсорами, - здесь модулей 23 и 24 - соединенных с одной и той же платой 50, которая, таким образом, работает в качестве "концентратора". Следует понимать в любом случае, что в различных вариантах осуществления конфигурация сети, используемой для соединения вместе управляющего блока 15 и множества модулей, может отличаться от конфигурации, показанной в качестве примера, например, использованием шинной архитектуры петлевого типа, звездчатого типа, типа гирляндной сборки и т.д.
В различных вариантах осуществления одна или более управляющих плат 50 оснащены модулем беспроводной связи для радиочастотной передачи по меньшей мере сигналов, соответствующих обнаружениям, выполненным присоединенными сенсорными средствами С и/или Р. Для этой цели управляющий блок 15 может содержать соответствующий модуль беспроводной связи. Для целей беспроводной передачи данных может использоваться стандарт связи, который считается наиболее эффективным для данного применения (WiFi, Bluetooth, ZigBee и т.д.). Сходным образом, передача данных может осуществляться в соответствии с подходящим стандартным или собственным протоколом. Проводка между управляющим блоком 15 и различными платами может быть использована для электрического питания самих плат со связанными модулями связи, которые могут, если это необходимо, также относиться к типу, который способен управлять двунаправленной связью. Очевидно, что в случае реализации беспроводной передачи данных проводка 51, 52 может включать в себя только выводы для электрического питания плат 50 и сенсорных средств С и/или Р различных модулей со встроенными сенсорами.
Упомянутые выше концепции, касающиеся конструкции, работы и соединения модулей покрытия со встроенными сенсорами, могут быть применены к автоматизированным устройствам, имеющим одну или более подвижных частей, которые могут даже отличаться от манипулятора промышленного робота.
Например, покрытие со встроенными сенсорами описанного выше типа - хотя оно и выполнено с модулями, имеющими формы, отличные от форм, показанных на фиг. 2-5 -предпочтительно может быть использовано для частичного покрытия рабочих инструментов робота или рабочих органов. Такой случай приведен в качестве примера на фиг. 10, где номером позиции 100 в целом обозначен захватный инструмент или захват, несущая нагрузку конструкция 101 которого имеет крепежную часть, выполненную -согласно известным способам - с возможностью механического соединения и, возможно, соединения питания (например, электрического или пневматического или гидравлического соединения) на фланце 9 манипулятора 1, показанного на фиг. 1-3. С конструкцией 101 связаны подходящие исполнительные средства, такие как один или более пневматических цилиндров 102, которыми могут управлять для обеспечения открытия и закрытия захватных элементов или зажимов - один из которых показан на фиг. 11 под номером позиции 103 - заготовки, подлежащей механической обработке или манипуляциям.
Как можно заметить, в показанном схематическом примере с конструкцией 101 связано множество покрывающих модулей 110, 111 и 112, 113, имеющих два покрытия 120 со встроенными сенсорами для различных областей инструмента 100. В частности, модули 110, 111 выполнены с возможностью окружения верхней части инструмента 100 ближе к части прикрепления к фланцу манипулятора, при этом модули 112, 113 выполнены для окружения нижней части инструмента 100, внутри которой могут перемещаться упомянутые выше захватные элементы 103. Следует отметить, что на фиг. 10 и 11 для большей ясности опущено изображение управляющей платы или плат 50 и соответствующей проводки 51, 52.
На фиг. 11 опущено изображение модуля 111, тогда как модуль 113 показан в состоянии, в котором он отделен от модуля 112. Модули 110-111 и 112-113 имеют соответствующие механические и/или электрические соединительные элементы, которые могут соединять рассматриваемые два модуля вместе в собранном состоянии, причем на фиг. 11 частично видны только соединительные элементы 45 и 46 модулей 112-113. Указанные электрические соединительные элементы могут быть, возможно, конфигурированы также для выполнения функции электрического соединения между этими двумя модулями. В любом случае в вариантах осуществления типа, приведенного в качестве примера на фиг. 10 и 11, модули 110-111 и 112-113 могут иметь соответствующие разъемные механические соединительные средства, в частности быстросъемные средства.
В различных вариантах осуществления рабочий инструмент робота или другой рабочий орган, конструкция которого покрыта по меньшей мере частично покрытием со встроенными сенсорами описанного в данном документе типа, предназначена для использования в тесном взаимодействии с человеком-оператором и содержит для этой цели устройство ручного управления.
Например, на фиг. 10 и 11 показан в качестве примера вариант осуществления, в котором такое устройство управления включает в себя множество рукояток 115, к каждой из которых оператор может прикладывать усилие в определенном направлении (толчок, тяга на себя, подъем, опускание), чтобы вызвать осуществление манипулятором 1 перемещений, соответствующих и необходимых для выполнения процесса. С ручками 115 связан сенсор усилия, соединенный с возможностью передачи сигналов с управляющим блоком 15 (в проводном или беспроводном режиме), чтобы позволить последнему распознавать направление смещения, требуемое оператором. Предпочтительно с каждой ручкой 115 связана соответствующая нажимная кнопка для управления переключением зажимных элементов 103 между соответствующими положениями открытия и закрытия.
В приведенном в качестве примера случае четыре рукоятки 115 расположены на четырех разных сторонах инструмента 100, чтобы позволить человеку-оператору каждый раз выбирать ту рукоятку, которая представляется наиболее удобной для осуществления операции, которую необходимо выполнить при взаимодействии с роботом.
На фиг. 12 и 13 показан другой инструмент или рабочий орган, обозначенный в целом номером позиции 200, в частности полировальный или шлифовальный инструмент. В этом случае несущая нагрузку конструкция 201 инструмента 200 также включает в себя крепежную часть, выполненную с возможностью соединения с фланцем 9 манипулятора 1, показанного на фиг. 1-3. С конструкцией 201 связаны подходящие исполнительные средства, такие как электрический двигатель 202, которые могут управляться для обеспечения вращения диска 203 для абразивной обработки или полировки заготовки. На фиг. 12 и 13 для большей ясности опущено изображение управляющей платы или плат 50 и соответствующей проводки 51, 52.
В схематическом примере, показанном на фиг. 12, с конструкцией 201 связаны два покрывающих модуля 210, 211, предназначенные для обеспечения покрытия 220 со встроенными сенсорами, которое большей частью окружает конструкцию 201, оставляя диск 203 механической обработки открытым. На фиг. 13, где опущено изображение модуля 210, можно видеть, каким образом и в этом случае модули 210-211 имеют соответствующие механические (и возможно электрические) соединительные элементы, причем здесь виден только соединитель 46, связанный с несущей нагрузкой конструкцией модуля 211, с упомянутыми соединительными элементами, которые могут соединять вместе два рассматриваемых модуля в собранном состоянии. В остальном применимы соображения, изложенные выше в отношении инструмента 100, показанного на фиг. 10-11.
В приведенном в качестве примера случае инструмент 200 также имеет устройство ручного управления, которое здесь включает в себя две в целом параллельные ручки, связанные с сенсором усилия с возможностью передачи сигналов в управляющий блок робота, чтобы позволить оператору осуществлять смещения манипулятора и, таким образом, инструмента 200, в требуемом направлении работы. В этом случае каждая рукоятка также имеет соответствующую нажимную кнопку для управления вращением двигателя 102.
Покрытие со встроенными сенсорами в соответствии с изобретением также может применяться с устройствами для перемещения компонентов, подвергаемых машинной обработке. Пример в этом контексте схематически изображен на фиг. 14, где номером позиции 300 в целом обозначено автоматизированное управляемое транспортное средство (AGV) для транспортировки стандартной детали К в рамках производства. С несущей нагрузку конструкцией 301 транспортного средства 300 связаны колеса 302, некоторые из которых приводятся во вращение с помощью подходящего двигателя, предпочтительно электрического двигателя (не показан). Кроме того, конструкция 301 поддерживает управляющую систему 303 транспортного средства, например, содержащую управляющий блок и пользовательский интерфейс для установки рабочих параметров в соответствии с известным способом. Согласно изобретению конструкция 301 имеет покрытие со встроенными сенсорами, обозначенное в целом номером позиции 320, которое электрически соединено с упомянутым управляющим блоком. В этом примере используется множество покрывающих модулей 321-328, при этом предпочтительно, но необязательно, все они выполнены со встроенными сенсорами и имеют такую форму, что в их собранном состоянии они по существу полностью окружают конструкцию 301. Предпочтительно верхняя часть конструкции 301, напротив, остается открытой для того, чтобы поддерживать на ней перемещаемую заготовку К. В этом типе реализаций также применяются принципы, описанные выше, таким образом, например, использование по меньшей мере в некоторых модулях 321-328 контактных сенсорных средств и/или бесконтактных сенсорных средств, и предпочтительно механических соединительных средств и, возможно, электрических соединительных средств для электрического и, возможно, механического соединения между собой, соответственно, множества смежных модулей и т.д.
Модули, показанные со ссылками на фиг. 10-14, могут быть выполнены таким же образом, что и модули, описанные со ссылками на предыдущие фиг. 1-9. Изобретение, конечно, может быть применено также и к автоматизированным устройствам других типов, которые используются в промышленном производстве и отличаются наличием одной или более частей, подлежащих перемещению в областях, потенциально близких к человеку-оператору, таких как поворотные столы и суппорты.
В различных вариантах осуществления покрытие со встроенными сенсорами согласно изобретению содержит сигнальное устройство, выполненное с возможностью подачи информации, относящейся к его рабочему состоянию, и возможно информации, относящейся к рабочему состоянию автоматизированного устройства, на котором установлено покрытие.
В различных вариантах осуществления упомянутое сигнальное устройство представляет собой устройство оптического типа, которое содержит многоцветное светоизлучающее устройство, которым могут управлять для генерации световых сигналов, цвет которых и/или способ излучения которых (непрерывно или прерывисто) зависят от типа информации, предназначенной для подачи.
Например, может быть предположено, что общее светоизлучающее устройство типа RGB связано с покрытием со встроенными сенсорами в соответствии с изобретением, установленным на роботе, например, описанного выше типа.
Непрерывное излучение света с первым цветом (например, синим) может пониматься как указывающее на то, что робот находится в состоянии взаимодействия, т.е. в "автоматическом" или "дистанционном" рабочем режиме, предусматривающем присутствие человека-оператора вблизи робота, на который накладывается пониженная скорость смещения соответствующего манипулятора. Излучение света с тем же самым цветом, но с миганием или прерывистостью, может пониматься как указывающее на то, что робот находится в состоянии ручного управления со стороны человека-оператора, например, полученным через направляющие устройства 115 или 215 на фиг. 9-10, 11-12, соответственно, причем также и в этом случае накладывается пониженная скорость смещения манипулятора.
Непрерывное излучение света со вторым цветом (например, красным) может пониматься как указывающее на то, что произошел удар на покрытии со встроенными сенсорами, обнаруженный с помощью контактных сенсорных средств С, тогда как излучение света с тем же цветом, но с миганием или прерывистостью, может пониматься как указывающее на присутствие инородного тела, включая оператора, на расстоянии от покрытия со встроенными сенсорами, которое может быть обнаружено с помощью бесконтактных сенсорных средств Р (также в этих случаях, предпочтительно в рабочих условиях робота, на который накладывается пониженная скорость смещения).
Излучение света с третьим цветом (например, зеленым) может пониматься как указывающее на то, что робот работает в "автоматическом" или "дистанционном" рабочем режиме с нормальной (т.е., не уменьшенной) скоростью, который не предусматривает наличия человека-оператора вблизи от манипулятора. Для этой цели рабочая зона манипулятора может, например, быть оснащена известной системой для обнаружения возможного присутствия оператора, такой как лазерная система сканера (в упомянутых случаях, после обнаружения присутствия оператора управляющий блок робота может, например, прервать работу самого робота или наложить на манипулятор указанную уменьшенную скорость смещения).
Наконец, отсутствие излучения света может означать, что робот находится в режиме "программирования".
Логика, контролирующая управление с вето излучающим устройством, предпочтительно реализована в управляющем блоке робота, таком как блок 15 с фиг. 1.
В различных вариантах осуществления светоизлучающее устройство содержит одну или более светодиодных лент RGB, которые могут быть установлены на внешней стороне покрытия со встроенными сенсорами или на его внутренней стороне, или снова на нижележащей конструкции, в подходящих прорезях или зазорах самого покрытия.
Например, на фиг. 2 и 3 показан пример светодиодной ленты RGB, схематически изображенной пунктирной линией и обозначенной номером позиции 80, которая установлена под покрытием 20, по существу, в положениях, соответствующих взаимно обращенным друг к другу частям двух модулей самого покрытия (в этом примере модули 31 и 32). В реализации такого типа обращенные друг к другу части двух рассматриваемых модулей могут быть выполнены с такой формой, что между ними образована прорезь, имеющая ширину, достаточную для обеспечения возможности видимости света, излучаемого светодиодной лентой 80, снаружи покрытия; на фиг. 2 и 3 такая прорезь обозначена номером позиции 81. В приведенном в качестве примера случае светодиодная лента 80 может быть закреплена в положении на конструкции манипулятора 1, например, с помощью специально предусмотренных кронштейнов. Очевидно, возможны и другие конфигурации установки, например, на несущей нагрузку конструкции 40 модуля; как указано выше, излучатель 80 света также может быть установлен на внешней стороне покрытия 20. Конечно, может быть установлено несколько излучателей 80 света в разных частях манипулятора, чтобы гарантировать, что световые сигналы могут быть видны с нескольких сторон.
То, что описано в отношении оптического сигнального устройства и приведено в качестве примера в отношении робота, может быть реализовано также в других автоматизированных устройствах, таких как устройства на фиг. 10-11, 12-13 и 14.
На фиг. 15, 16 и 17 показаны схематические иллюстрации некоторых возможных условий обнаружения с помощью покрытия со встроенными сенсорами в соответствии с изобретением, установленного, например, на роботе типа, описанного со ссылкой на фиг. 1-9. На этих чертежах покрытие, обозначенное номером позиции 20, представлено только схематично. Линии РТ1 и РТ2 схематически представляют два возможных заданных порога обнаружения для бесконтактных сенсорных средств (Р) покрытия, которые могут, например, соответствовать расстоянию приблизительно 5 см и приблизительно 0,5 см, соответственно, от самой внешней поверхности покрытия. Линия СТ схематически представляет порог срабатывания контактных сенсорных устройств (С) покрытия (упомянутый порог СТ может, например, пониматься как порог деформации слоев 62-67 на фиг. 6, необходимый для того, чтобы вызвать переключение сенсорного устройства С на фиг. 6-8).
На фиг. 15 показан случай, когда человек-оператор 20 находится в пределах расстояния от покрытия 20, которое находится внутри диапазона порога РТ1 (5 см, в качестве не ограничивающего примера). После упомянутого обнаружения, управляющий блок 15 выдает команду для остановки перемещения манипулятора 1. В таком случае, если в течение определенного заданного времени (например, от 2 до 5 с), блок 15 не обнаруживает (с помощью сенсорных средств С) удара на покрытии 20, перемещение манипулятора 1 возобновляется. Порог или расстояние РТ1 предпочтительно может быть конфигурировано, например, в соответствии с типом применения робота.
На фиг. 16 показан случай, когда человек-оператор 20 находится в пределах расстояния от покрытия 20, которое находится внутри диапазона порога РТ2 (0,5 см, в качестве не ограничивающего примера), или, на практике, в состоянии, при котором он соприкоснулся или имел легкий контакт с внешней поверхностью покрытия. После такого обнаружения, управляющий блок 15 выдает команду для остановки перемещения манипулятора 1. В этом случае также, если в течение определенного заданного времени (например, от 2 до 5 с), блок 15 не обнаруживает (с помощью сенсорных средств С) удара на покрытии 20, перемещение манипулятора 1 возобновляется. Порог или расстояние РТ2 предпочтительно является немодифицируемым порогом, поскольку он представляет собой критическое состояние, т.е. контакт или почти контакт покрытия с инородным телом. Другими словами, порог РТ1 можно рассматривать как функциональный порог, т.е. порог, который может быть свободно установлен на основе типа применения робота или определенных функций, которые должны быть назначены покрытию со встроенными сенсорами, тогда как порог РТ2 является порогом безопасности, который предназначен для обеспечения безопасности оператора.
Наконец, на фиг. 17 показан случай, когда на покрытие 20 оказывается удар так, чтобы вызвать переключение контактных сенсорных средств С (порог ТС), а также, очевидно, обнаружение близости, представленное превышением обоих порогов РТ1 и РТ2. В этом случае (сигналы от обоих сенсоров Р и С) управляющий блок 15 останавливает перемещение манипулятора 1, который, например, может быть перезапущен только путем приведения в действие специального управляющего элемента (например, кнопка запуска или сброса), расположенного на управляющем блоке 15.
Как упомянуто выше, условия, соответствующие фиг. 15, 16, могут сигнализироваться визуально с помощью светоизлучающего устройства, такого как светодиодная лента 80, с первой заданной модальностью излучения света (например, мигающий красный свет), тогда как условие, соответствующее части С) на фиг. 15 может сигнализироваться с помощью второй заданной модальности излучения света (например, свет другого цвета или снова красный свет, но излучаемый непрерывно). Как указано выше, могут быть использованы другие цвета и/или способы включения/выключения излучателя 80 для сигнализации других состояний покрытия и/или робота (например, как показано выше, непрерывный синий цвет для указания на состояние взаимодействия, прерывистый синий свет для указания на состояние ручного управления, непрерывный зеленый свет для указания на "автоматический" или "дистанционный" рабочий режим без взаимодействия, отсутствие излучения света для указания на режим "программирования").
Из приведенного выше описания очевидны характеристики настоящего изобретения, а также его преимущества.
Модульный характер описанного покрытия со встроенными сенсорами позволяет получить множество конфигураций с возможностью оснащения сенсорами по существу всей подвижной конструкции автоматизированного устройства или же только ее части, в зависимости от типа применения. Данное решение обеспечивает удобную установку покрывающих модулей и в равной степени удобное их удаление в случае необходимости. Наличие несущей нагрузку конструкции позволяет определить форму отдельных модулей в соответствии с применением, с возможностью использования покрытий со встроенными сенсорами для различных типов автоматизированных устройств. Оболочечный характер несущих нагрузку конструкций модулей позволяет образовать полезные пространства для размещения электрических/электронных частей покрывающей системы и частей автоматизированного устройства, которые также могут быть использованы для целей вентиляции.
Наличие сенсорных средств, включенных по меньшей мере в некоторые модули покрытия, позволяет обнаружить контакты и/или приближение инородных тел к самому покрытию, а также идентифицировать область покрытия, вовлеченную в контакт с инородным телом или в процесс приближения последнего, с возможностью принятия последующих корректирующих действий. Сенсорные средства, в частности контактные сенсорные средства, имеют простую структуру и конструкцию и не требуют особых калибровок, хотя они гарантируют высокую надежность, повторяемость и точность вмешательства. Кроме того, обеспечиваются функции пассивной безопасности благодаря наличию одного или более упруго податливых слоев, которые, таким образом, способны поглощать удар и предотвращать или ограничивать его негативные последствия.
Наличие сигнального устройства позволяет простым и интуитивно понятным способом подавать информацию о рабочих состояниях или условиях покрытия со встроенными сенсорами, включая определение типа контакта или удара, и, возможно, информацию о рабочем состоянии автоматизированного устройства, на которое установлено само покрытие.
Очевидно, специалист в данной области техники может внести многочисленные изменения в покрытие со встроенными сенсорами и в автоматизированное устройство, описанные в качестве примера, без отхода при этом от объема правовой охраны изобретения, определенного в приведенной ниже формуле изобретения.
Изобретение может быть использовано для промышленных роботов различных размеров и грузоподъемностей и, таким образом, как для роботов для умеренных грузоподъемностей (например, всего лишь несколько килограммов), так и для роботов для больших грузоподъемностей (например, сотни килограммов), а также для роботов типа, отличного от антропоморфных роботов, приведенных в качестве примера в данном документе, например, для роботов с декартовой конфигурацией, цилиндрической конфигурацией, полярной конфигурацией, роботов с конфигурацией типа SCARA (робот с избирательной податливостью руки) и т.д.
Один или более пассивных слоев, упомянутые выше, например, демпфирующий слой 60 и/или 64, могут, в свою очередь, состоять из нескольких слоев материала, установленных друг над другом и фиксированных относительно друг друга, например, посредством склеивания.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО С ПОДВИЖНОЙ КОНСТРУКЦИЕЙ, В ЧАСТНОСТИ РОБОТ | 2017 |
|
RU2727381C2 |
| СЕНСОРНОЕ ПОКРЫТИЕ ДЛЯ ПРОМЫШЛЕННОГО УСТРОЙСТВА | 2017 |
|
RU2722379C2 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ВЗАИМОДЕЙСТВИЯ | 2009 |
|
RU2479414C2 |
| Роботизированный комплекс для нанесения полимерных и лекарственных покрытий на импланты | 2018 |
|
RU2699356C1 |
| СОБЫТИЙНАЯ СИСТЕМА | 2020 |
|
RU2775534C1 |
| СИСТЕМА И СПОСОБ ДОЗАПРАВКИ СПУТНИКОВ | 2008 |
|
RU2478534C2 |
| СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ СНЯТИЯ ПАРАМЕТРОВ ОРГАНИЗМА ПАЦИЕНТА | 2009 |
|
RU2462984C2 |
| ЭЛЕКТРОХИМИЧЕСКИЙ СЕНСОР И СЕНСОРНАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО АНАЛИТА | 2018 |
|
RU2753170C1 |
| СЕНСОРНАЯ СИСТЕМА ДЛЯ МОНИТОРИРОВАНИЯ КОНЦЕНТРАЦИИ АНАЛИТА В ФИЗИОЛОГИЧЕСКОЙ ЖИДКОСТИ И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2018 |
|
RU2766386C2 |
| УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОГО ЧТЕНИЯ ДОКУМЕНТОВ | 2022 |
|
RU2781211C1 |
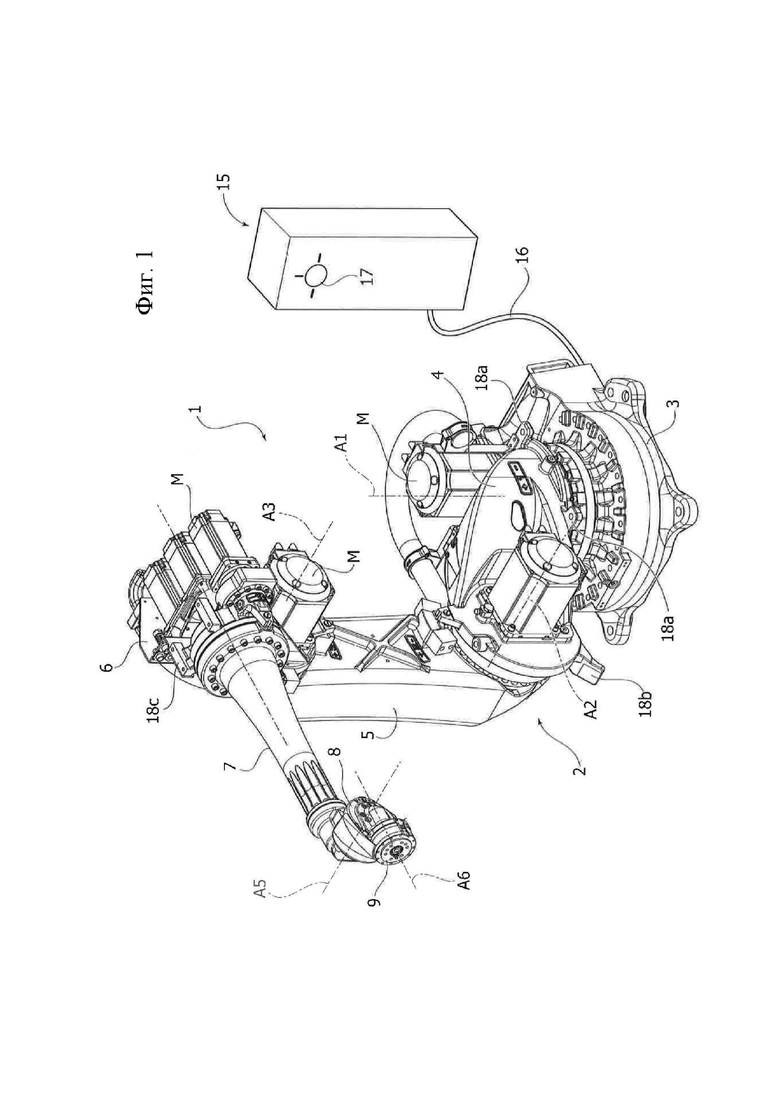
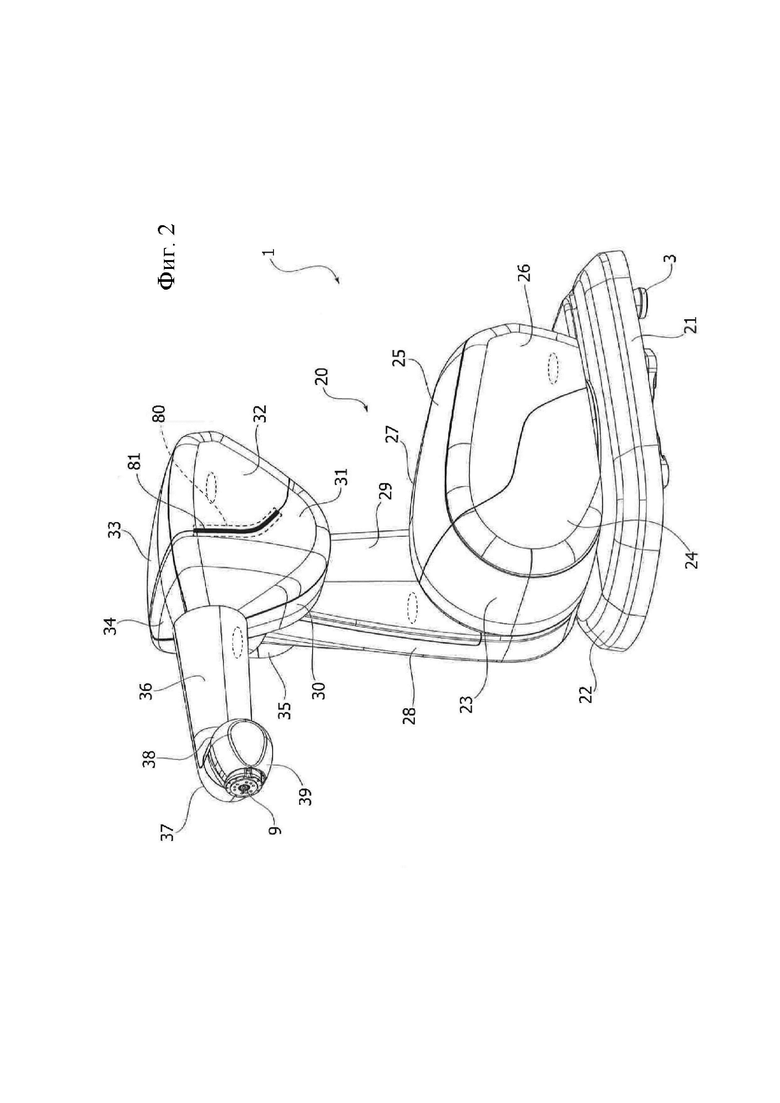
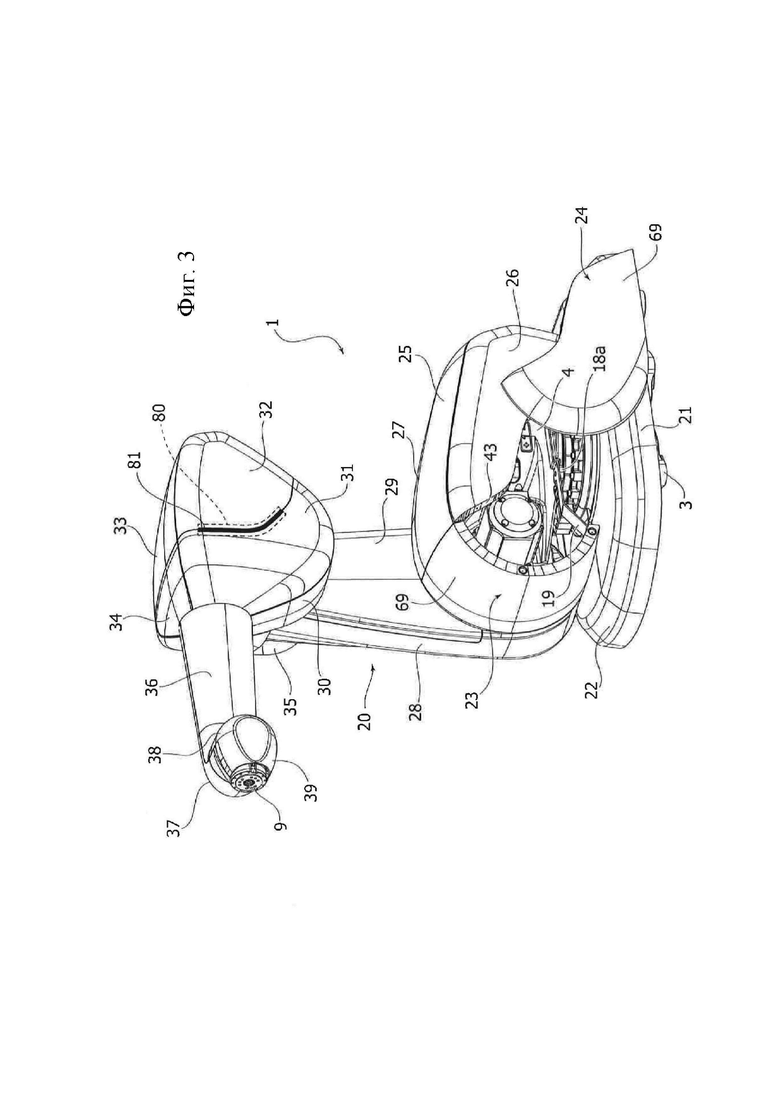
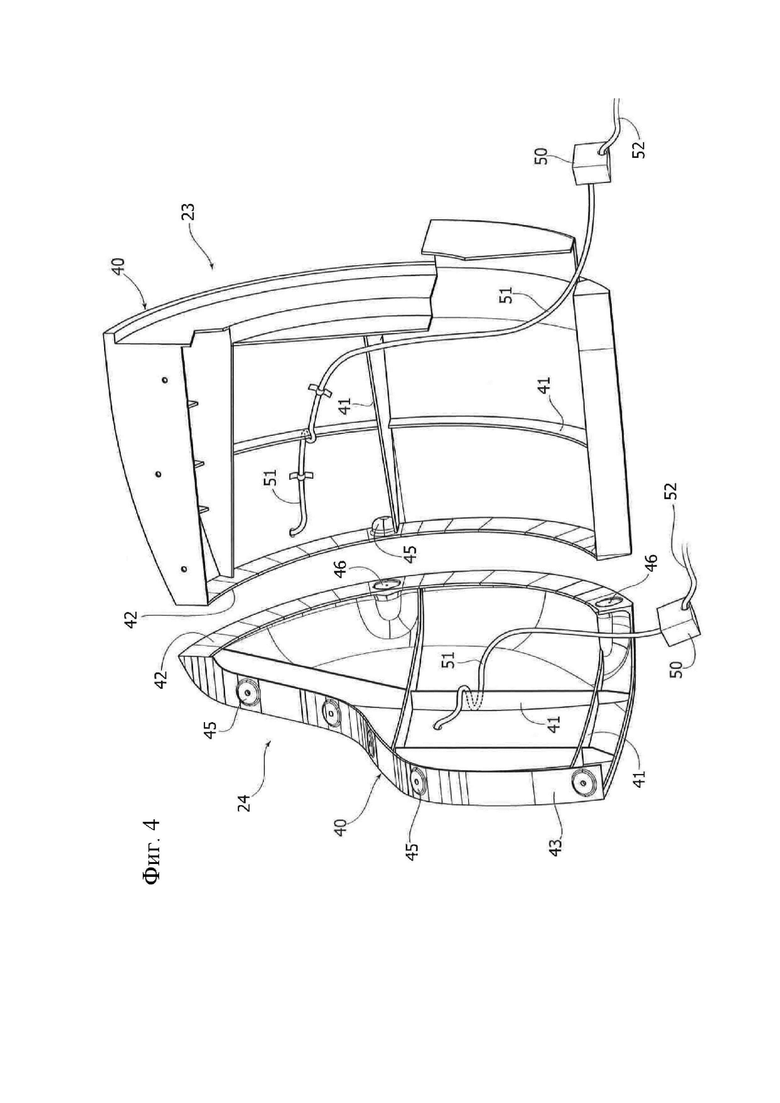
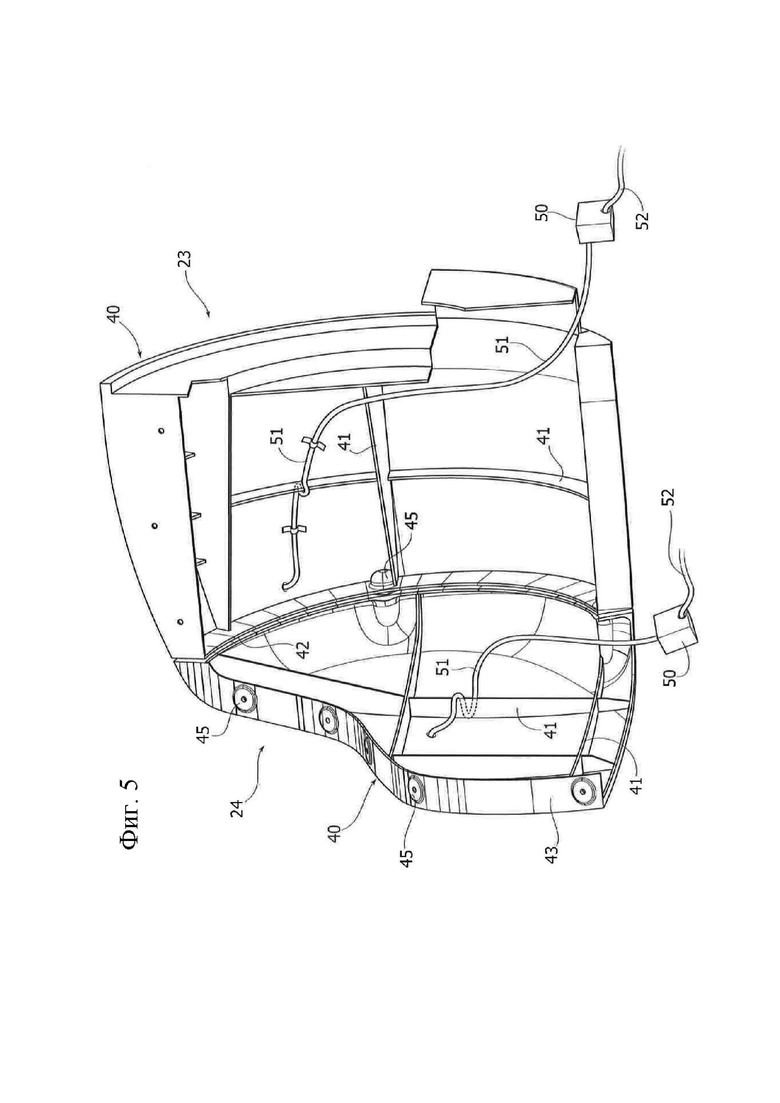
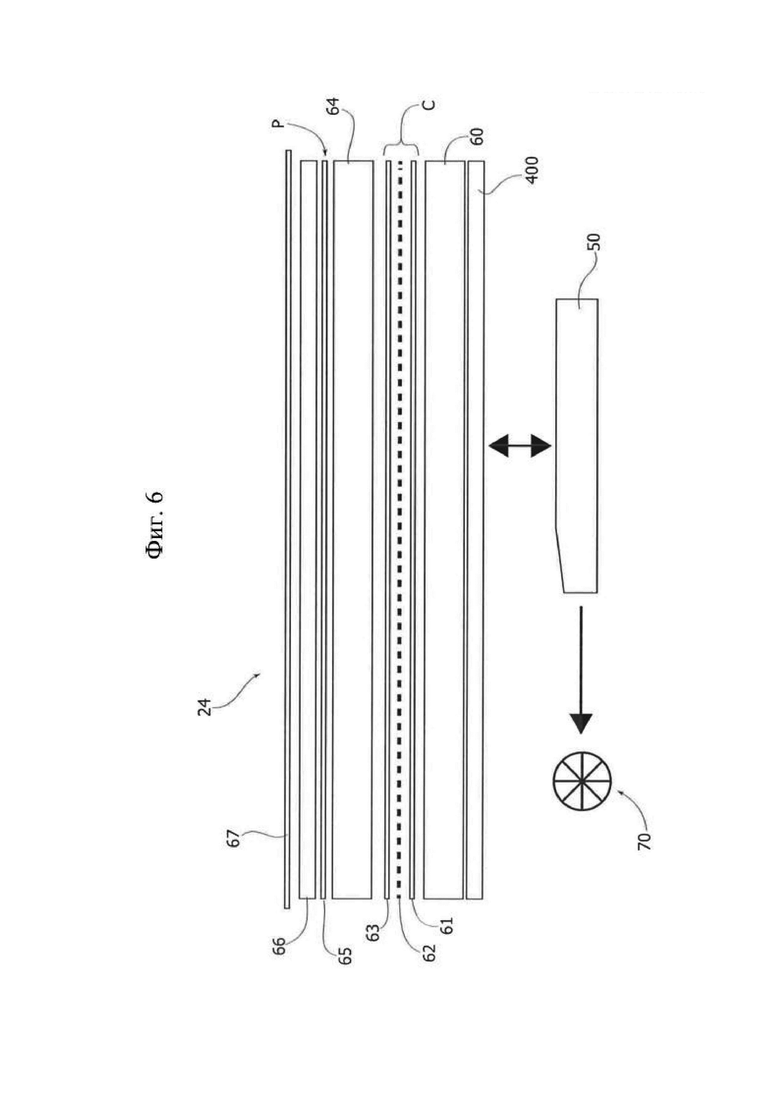
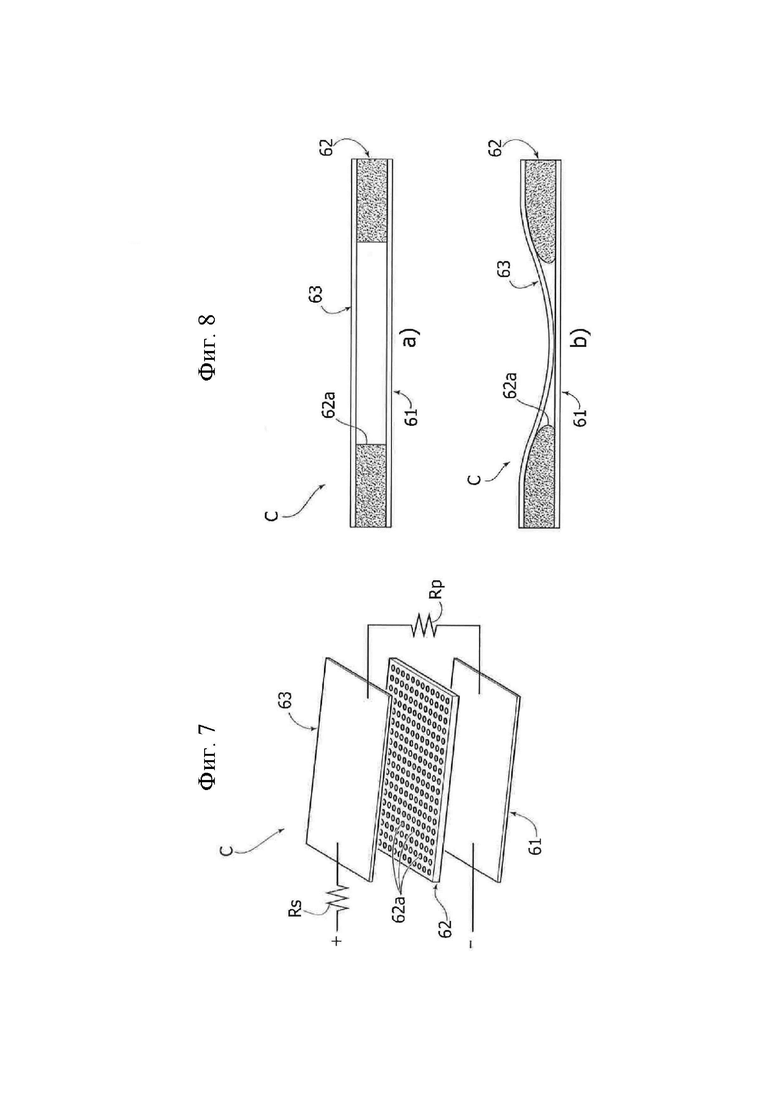
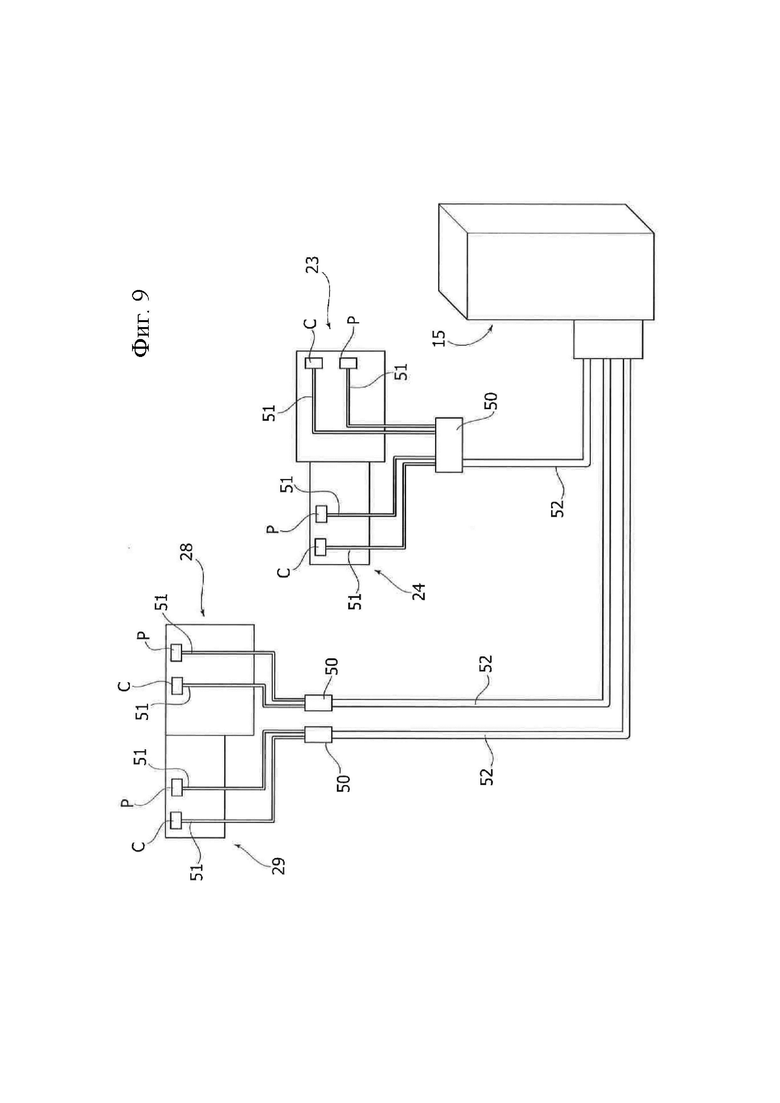
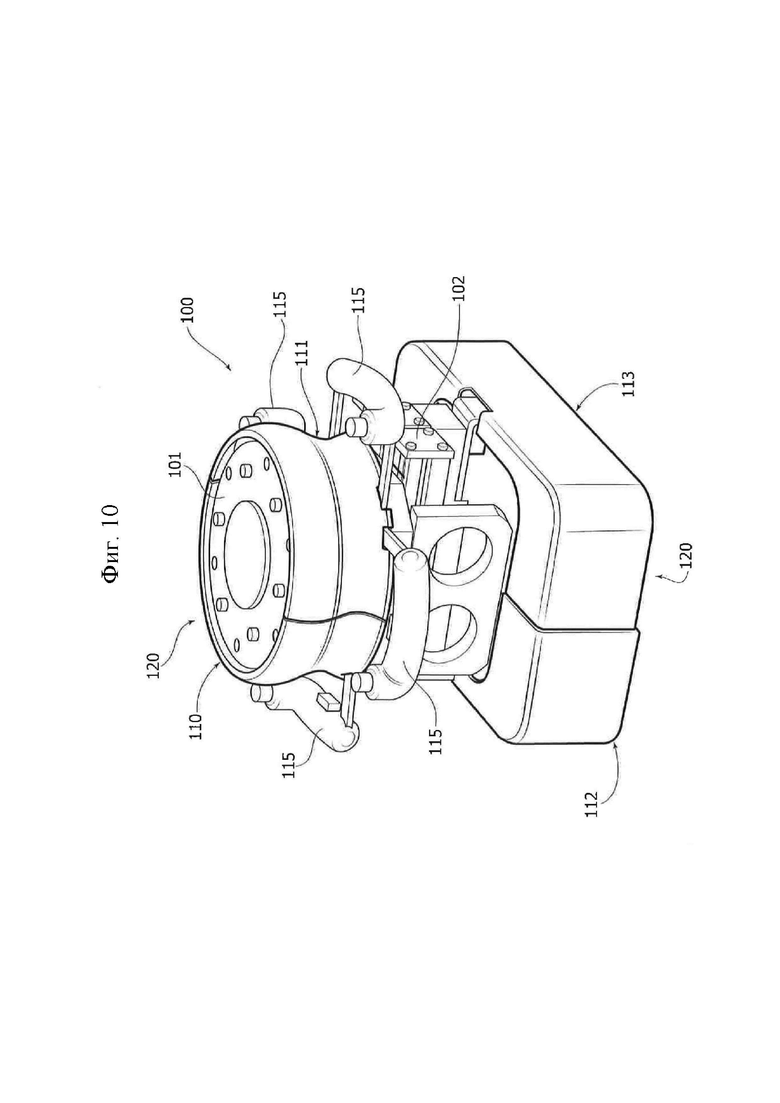
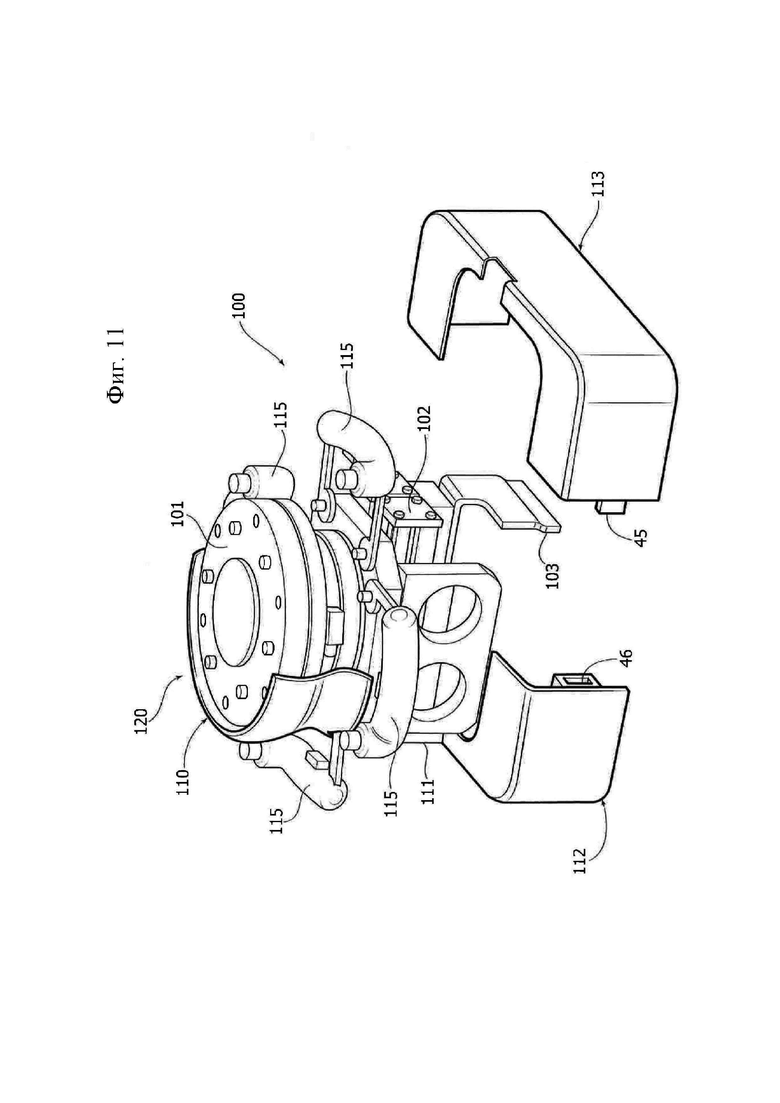
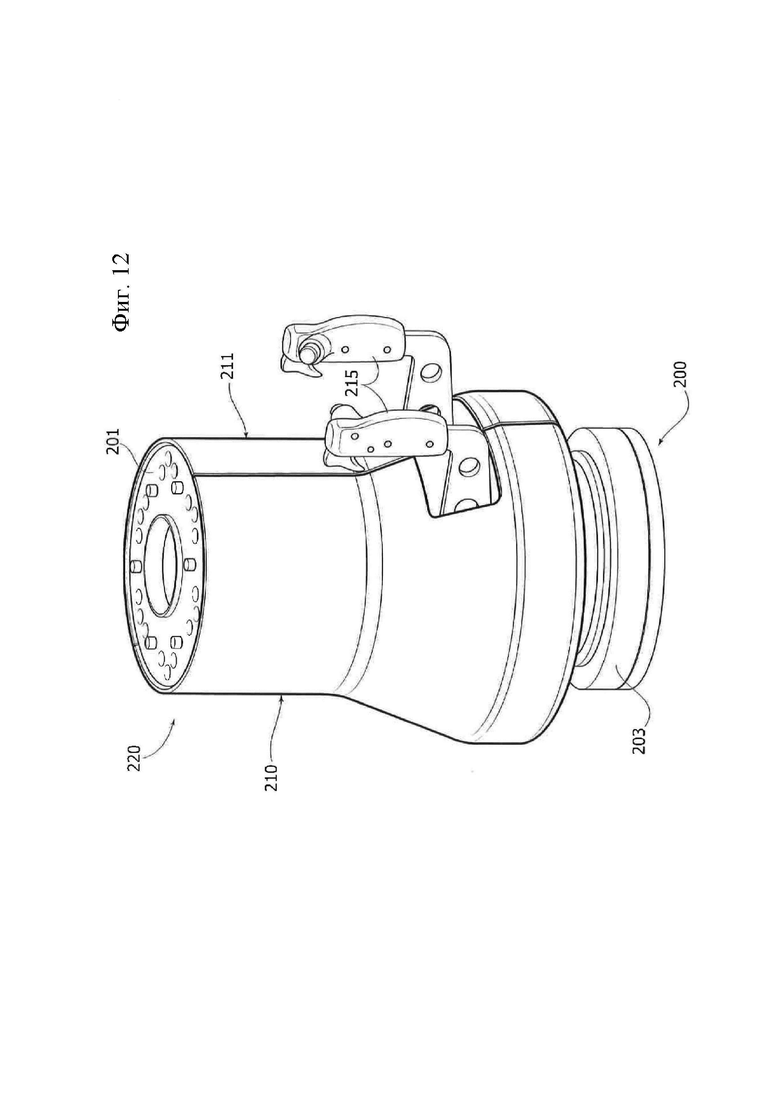
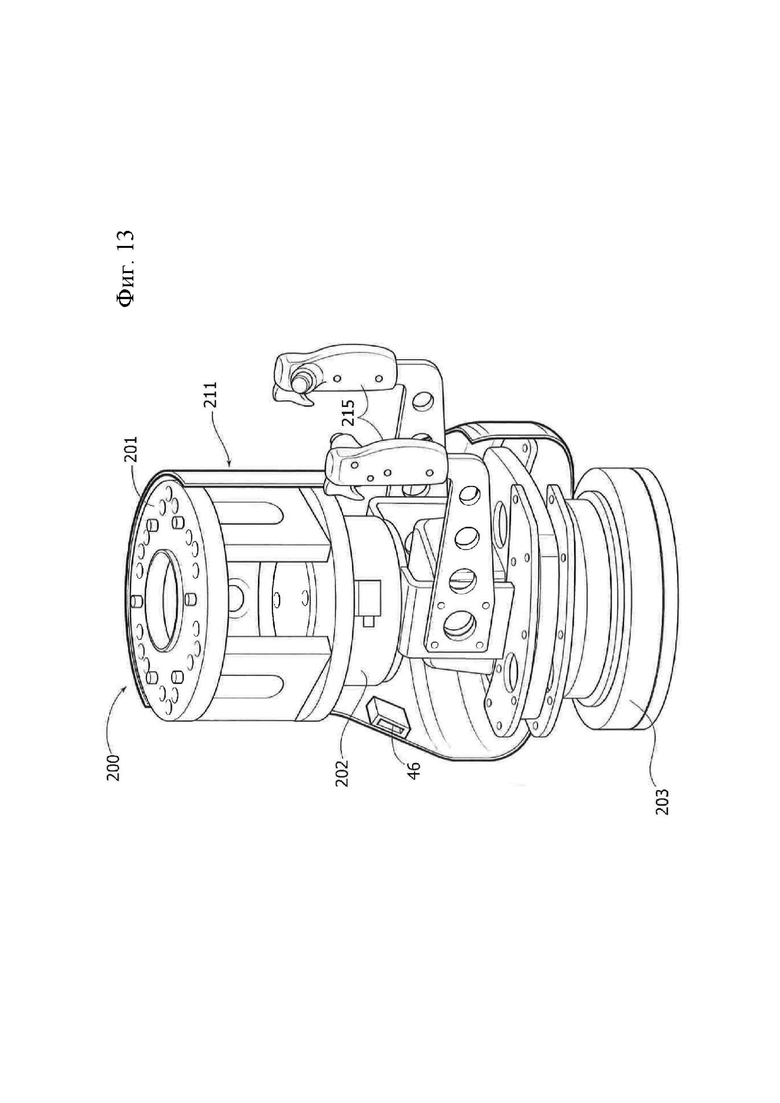
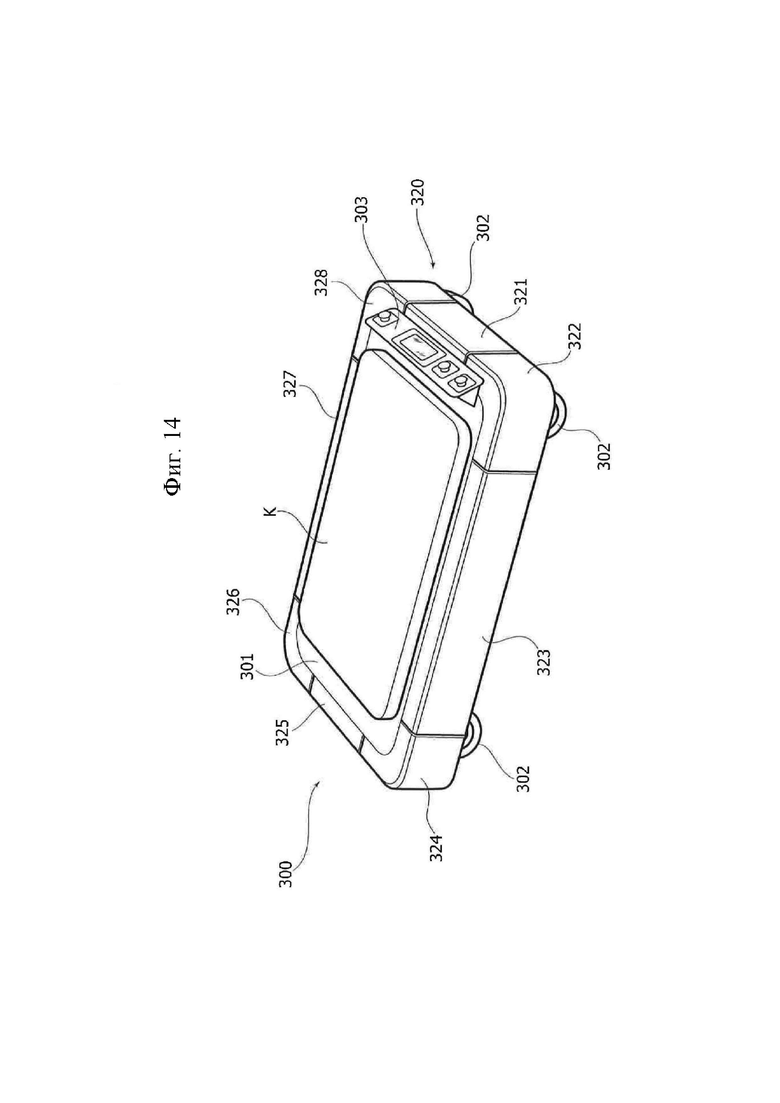
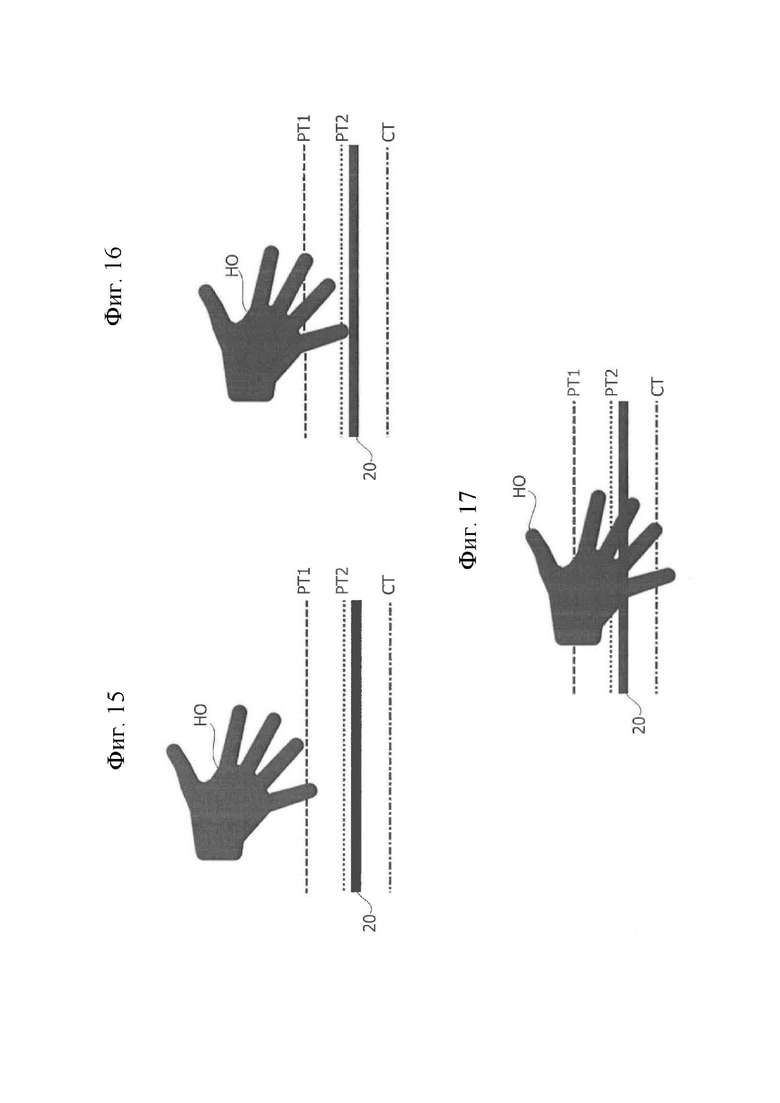
Изобретение относится к автоматизированным устройствам, используемым в области промышленного производства, при этом оно было разработано, в частности, в связи с проблемой взаимодействия между человеком-оператором и таким автоматизированным устройством. Изобретение предпочтительно может применяться в области робототехники, оно также может быть предпочтительно реализовано на других устройствах, используемых в области промышленного производства. Автоматизированное устройство имеет подвижную конструкцию, покрытую по меньшей мере частично покрытием со встроенными сенсорами. Покрытие со встроенными сенсорами содержит множество покрывающих модулей, включающее в себя один или более покрывающих модулей со встроенными сенсорами. Каждый покрывающий модуль со встроенными сенсорами имеет конструкцию, содержащую множество отдельных слоев, расположенных друг над другом, содержащее несущий нагрузку слой, выполненный из жесткого или полужесткого материала и имеющий заданную форму, и по меньшей мере один демпфирующий слой, выполненный из упруго сжимаемого материала и расположенный на несущем нагрузку слое. Каждый покрывающий модуль со встроенными сенсорами включает в себя по меньшей мере одно контактное сенсорное устройство (С), имеющее первый нижний электропроводящий слой (61) и второй верхний электропроводящий слой (63), между которыми установлен электроизоляционный слой (62). Электроизоляционный слой (62) выполнен из упруго сжимаемого материала и имеет множество сквозных отверстий (62а), расположенных таким образом, что первый нижний электропроводящий слой (61) и второй верхний электропроводящий слой (63) локально обращены друг к другу на сквозных отверстиях (62а). Технический результат изобретения - создание автоматизированного промышленного устройства, такого как робот, имеющего покрытие со встроенными сенсорами, которое может обеспечить высокую степень взаимодействия между устройством и человеком-оператором, в то же время гарантируя выполнение необходимых требований безопасности. 3 н. и 11 з.п. ф-лы, 17 ил.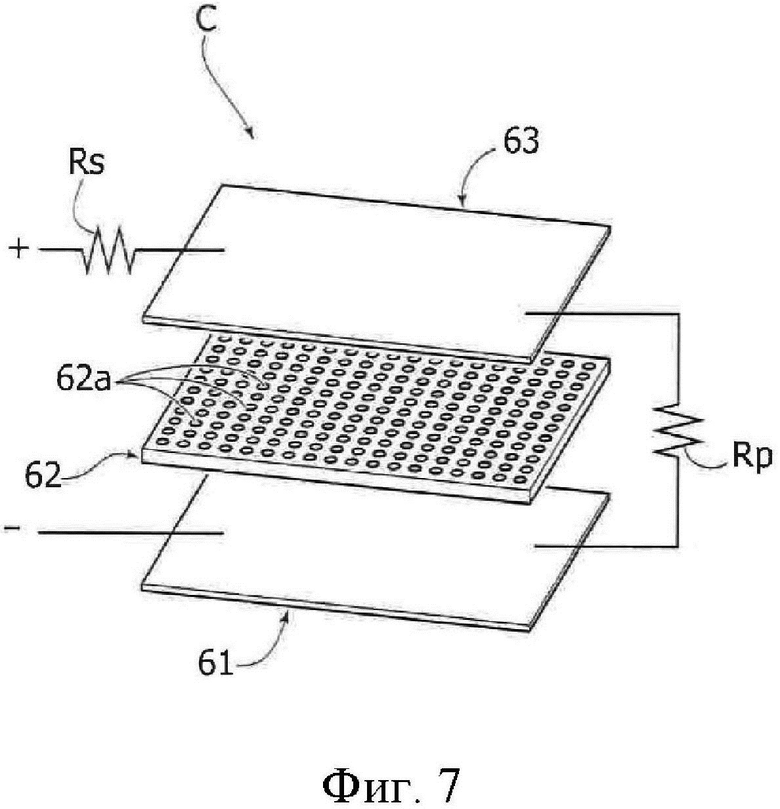
1. Автоматизированное устройство (1, 15; 100; 200; 300), такое как робот, содержащее:
- подвижную конструкцию (4-8; 103; 203; 301);
- исполнительные средства (М; 102; 202) для обеспечения смещений подвижной конструкции (4-8; 103; 203; 301);
- управляющую систему (15, 50; 303), выполненную с возможностью управления исполнительными средствами (М; 102; 202); и
- покрытие (20; 120; 220; 320) со встроенными сенсорами, покрывающее по меньшей мере часть подвижной конструкции (4-8; 103; 203; 301),
причем покрытие (20; 120; 220; 320) со встроенными сенсорами содержит множество покрывающих модулей (21-39; 110-113; 210-211; 321-328), включающее в себя один или более покрывающих модулей (23, 24, 28, 29) со встроенными сенсорами, имеющих сенсорные средства (С, Р),
при этом каждый покрывающий модуль (23, 24, 28, 29) со встроенными сенсорами имеет несущую нагрузку конструкцию (40), содержащую множество наложенных друг на друга отдельных слоев (400, 60-67), содержащее несущий нагрузку слой (400), выполненный из жесткого или полужесткого материала и имеющий заданную форму, и по меньшей мере один демпфирующий слой (60, 64, 65), выполненный из упруго сжимаемого материала и расположенный на несущем нагрузку слое (400),
причем каждый покрывающий модуль (23, 24, 28, 29) со встроенными сенсорами включает в себя по меньшей мере одно контактное сенсорное устройство (С), имеющее первый нижний электропроводящий слой (61) и второй верхний электропроводящий слой (63), между которыми установлен промежуточный электроизоляционный слой (62),
при этом промежуточный электроизоляционный слой (62) контактного сенсорного устройства (С) выполнен из упруго сжимаемого материала и имеет множество сквозных отверстий (62а), расположенных таким образом, что первый нижний электропроводящий слой (61) и второй верхний электропроводящий слой (63) локально обращены друг к другу на указанных сквозных отверстиях (62а).
2. Автоматизированное устройство по п. 1, в котором контактное сенсорное устройство (С) содержит:
- первый электрический проводник (-) и второй электрический проводник (+), соединенные с первым нижним электропроводящим слоем (61) и со вторым верхним электропроводящим слоем (63), соответственно, для приложения разности потенциалов между ними; и
- по меньшей мере два резистора (Rs, Rp), из которых первый резистор (Rp) соединен между первым нижним электропроводящим слоем (61) и вторым верхним электропроводящим слоем (63) и второй резистор (Rs) соединен с одним из первого электрического проводника (-) и второго электрического проводника (+),
при этом первый резистор (Rp) и второй резистор (Rs) предпочтительно имеют различные значения электрического сопротивления, причем значение электрического сопротивления первого резистора (Rp) предпочтительно больше значения электрического сопротивления второго резистора (Rs).
3. Автоматизированное устройство по п. 1 или 2, дополнительно содержащее сигнальное устройство (80, 81) оптического типа, выполненное с возможностью подачи информации, представляющей по меньшей мере одно состояние, обнаруживаемое с помощью сенсорных средств (С, Р), причем сигнальное устройство (80, 81) оптического типа содержит по меньшей мере одно многоцветное светоизлучающее устройство (80), управляемое для генерации световых сигналов, цвет и/или модальность излучения которых зависят от типа информации, предназначенной для подачи.
4. Автоматизированное устройство по п. 3, в котором указанное по меньшей мере одно многоцветное светоизлучающее устройство (80) содержит светодиодную ленту RGB.
5. Автоматизированное устройство по любому из пп. 1-4, в котором несущая нагрузку конструкция (40) по меньшей мере некоторых из покрывающих модулей (21-39; 110-113; 210-211; 321-328) образует или имеет связанные соединительные элементы (45, 46), предназначенные для обеспечения возможности механического и/или электрического соединения вместе, с возможностью отсоединения, по меньшей мере двух разных покрывающих модулей (23, 24, 28, 29), расположенных смежно друг с другом, при этом предпочтительно несущая нагрузку конструкция (40) первого покрывающего модуля (23) имеет по меньшей мере одну поверхность или стенку (42, 43), обращенную к соответствующей поверхности или стенке (42, 43) смежного второго покрывающего модуля (24), причем соответствующие соединительные элементы связаны с поверхностью или стенкой первого покрывающего модуля (23) и с поверхностью или стенкой второго покрывающего модуля (24).
6. Автоматизированное устройство по любому из пп. 1-5, в котором каждый из первого нижнего электропроводящего слоя (61) и второго верхнего электропроводящего слоя (63) содержит электропроводящую ткань, при этом второй верхний электропроводящий слой (63) предпочтительно является более упругим, чем первый нижний электропроводящий слой (61).
7. Автоматизированное устройство по любому из пп. 1-6, в котором по меньшей мере один покрывающий модуль (23, 24, 28, 29) со встроенными сенсорами включает в себя по меньшей мере одно бесконтактное сенсорное устройство (Р), содержащее по меньшей мере один соответствующий слой электропроводящего материала (65), в частности электропроводящей ткани.
8. Автоматизированное устройство по любому из пп. 1-7, содержащее множество указанных покрывающих модулей (23, 24, 28, 29) со встроенными сенсорами, соединенных, с возможностью передачи сигналов, с управляющим блоком (15) управляющей системы (15, 50; 303) и выполненных с возможностью подачи сигналов или данных, представляющих обнаружения, производимые с помощью соответствующих сенсорных средств (С, Р), причем управляющий блок (15) выполнен с возможностью идентификации покрывающего модуля со встроенными сенсорами из указанного множества (23, 24, 28, 29), который подает указанные сигналы или данные.
9. Автоматизированное устройство по любому из пп. 1-8, в котором множество отдельных наложенных друг на друга слоев (400, 60-67) содержит одно или более из следующего:
- нижний демпфирующий слой (60), установленный под контактным сенсорным устройством (С), выполненный из упруго сжимаемого материала и связанный с внешней стороной несущего нагрузку слоя (400);
- верхний демпфирующий слой (64, 66), установленный сверху контактного сенсорного устройства (С) и выполненный из упруго сжимаемого материала;
- внешний покрывающий слой (67), выполненный из электроизоляционного материала и образующий по меньшей мере часть внешней поверхности соответствующего покрывающего модуля.
10. Автоматизированное устройство по любому из пп. 1-9, в котором отдельные наложенные друг на друга слои (60-67), проходящие над несущим нагрузку слоем (400), выполнены гибкими и/или имеют область поверхности, по существу соответствующую области внешней поверхности соответствующего покрывающего модуля (23, 24, 28, 29) или ее преобладающей части.
11. Автоматизированное устройство по любому из пп. 1-10, в котором несущий нагрузку слой (400) имеет форму, позволяющую образовать свободный зазор между его внутренней стороной и нижележащей частью подвижной конструкции (4-8; 103; 203; 301), в частности, для размещения компонентов (50, 51, 52, 70, 80) и/или для образования вентиляционных каналов.
12. Автоматизированное устройство по любому из пп. 1-11, содержащее по меньшей мере одну электронную управляющую плату (50), с которой соединены сенсорные средства (С, Р) соответствующего модуля (28, 29) со встроенными сенсорами или сенсорные средства (С, Р) множества модулей (23, 24) со встроенными сенсорами, причем указанная по меньшей мере одна электронная управляющая плата (50) предназначена для соединения, с возможностью передачи сигналов, с управляющим блоком (15) управляющей системы (15, 50; 303) автоматизированного устройства (1, 15; 100; 200; 300).
13. Покрытие (20; 120; 220; 320) со встроенными сенсорами, предназначенное для покрытия по меньшей мере части конструкции (4-8; 103; 203; 301) автоматизированного устройства (1, 15; 100; 200; 300), причем покрытие (20; 120; 220; 320) со встроенными сенсорами содержит множество покрывающих модулей (21-39; 110-113; 210-211; 321-328), каждый из которых имеет соответствующую несущую нагрузку конструкцию (40), с которой связан по меньшей мере один слой упруго сжимаемого материала (60, 64, 66), при этом покрытие (20; 120; 220; 320) со встроенными сенсорами имеет один или более сенсорных элементов (С, Р) и содержит по меньшей мере одно из следующего:
- контактное сенсорное устройство (С), имеющее первый электропроводящий слой (61) и второй электропроводящий слой (63), между которыми установлен промежуточный электроизоляционный слой (62), выполненный из упруго сжимаемого материала, причем промежуточный электроизоляционный слой (62) имеет множество сквозных отверстий (62а), расположенных таким образом, что первый электропроводящий слой (61) и второй электропроводящий слой (63) локально обращены друг к другу на указанных сквозных отверстиях (62а); и
- сигнальное устройство (80, 81) оптического типа, выполненное с возможностью подачи информации, относящейся к по меньшей мере одному рабочему состоянию покрытия (20; 120; 220; 320) со встроенными сенсорами, которое может быть обнаружено с помощью указанного одного или более сенсорных элементов (С, Р), при этом сигнальное устройство (80, 81) оптического типа содержит по меньшей мере одно многоцветное светоизлучающее устройство (80), выполненное с возможностью управления для генерации световых сигналов, цвет и/или модальность излучения которых зависят от типа информации, предназначенной для подачи.
14. Автоматизированное устройство, такое как робот, содержащее покрытие (20; 120; 220; 320) со встроенными сенсорами по п. 13.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ИЗВЛЕЧЕНИЯ ПРЕДМЕТОВ ИЗ ТРАНСПОРТИРУЮЩЕГО УСТРОЙСТВА | 2006 |
|
RU2407633C2 |
| СИСТЕМА УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ | 2007 |
|
RU2361726C2 |
| JP 2007102719 A, 19.04.2007 | |||
| Способ разрушения материального твердого тела при локальном высокоинтенсивном тепловом воздействии на его поверхность | 2020 |
|
RU2756936C1 |
| Способ отработки мощных пологих пластов | 1979 |
|
SU1004639A1 |

