Изобретение относится к области ракетно-космической техники и может быть использовано для обеспечения безопасности и надежности космических аппаратов при воздействии на них высокоскоростных микрочастиц естественного или искусственного происхождения.
В настоящее время международным сообществом признана проблема опасности техногенного засорения околоземного космического пространства, представляющего угрозу столкновения космического мусора с космическими аппаратами.
Для устранения такой опасности создана система контроля космического пространства и слежения за космическим мусором, с помощью которой осуществляют маневрирование космических аппаратов для увода от траектории столкновения к космическим мусором.
Однако такой способ не применим для устранения опасности столкновения с мелкодисперсным космическим мусором из-за трудности обнаружения частиц небольшого размера и затратного по времени и ресурсам маневрирования космического аппарата.
Опасность столкновения с мелкодисперсными частицам представляет угрозу в первую очередь по разгерметизации космического аппарата как пилотируемого, так и автоматического с герметичной платформой.
Известен ряд технических решений, направленных на обнаружение места разгерметизации для последующего ее устранения. Например, «Устройство определения координат места пробоя гермооболочки непилотируемого космического объекта космическими частицами и способ определения координат места пробоя», патент RU №2387965 МПК G01M 3/24, «Способ контроля герметичности корпуса КА на орбите с использованием волокнистого чувствительного элемента», патент RU №2343439, «Способ контроля герметичности КА на орбите», патент RU №2321835, «Способ определения мест течи из отсека КА и устройство для его осуществления», патент RU №2160438, «Способ обнаружения на орбите негерметичности корпуса КА», патент RU №2152015.
Однако такие решения предполагают достаточно длительный процесс измерения и последующего ремонта КА с участием космонавта и выходом в открытый космос.
Известно решение по патенту «Устройство для сохранения герметичности оболочки космических аппаратов при столкновении с высокоскоростными телами» RU №2349515, 2006 г.
Изобретение относится к средствам защиты космических аппаратов и сооружений на поверхности небесных тел, не обладающих плотной атмосферой, от возможных последствий разгерметизации данных объектов в результате их столкновения с мелкими метеоритами и другими сторонними телами. Согласно изобретению, устройство содержит не менее одного слоя элементов, приобретающих вращение при внецентренном прохождении через них метеорита или стороннего тела. Эти элементы размещены в защищаемом объеме оболочки КА и выполнены в форме цилиндра или шара. Каждый из указанных элементов помещен в жесткую оболочку, которая обеспечивает свободное вращение элемента. В зазор между оболочкой и данным элементов помещен слой смазки, застывающей при контакте с веществом указанного защищаемого объема или в результате спада давления. Технический результат изобретения состоит в создании надежного универсального устройства, обеспечивающего сохранение герметичности оболочки КА после столкновения с мелкими метеоритами и сторонними телами.
Недостатками такого решения является то, что устройство предназначено только для внецентренного прохождения тела столкновения.
При центральном и околоцентральном попадании тела столкновения данное устройство не работоспособно. Причем схема чувствительна к месту попадания тела столкновения для приведения во вращение элемента, имеющего возможность вращения. Максимальный импульс может быть получен только при касательном попадании тела столкновения. Более того, расчеты показывают, что при столкновении с мелкодисперсными телами, пробивающими оболочку, получаемый импульс движения недостаточен для приведения во вращение внутреннего элемента.
Расчет на приведение во вращение элементов конструкции космического аппарата от энергии столкновения с телом, пробивающим оболочку, ограничивает масштабы изготовления такой оболочки, а также требует неудобной конструктивной компоновки космического аппарата.
Решение по патенту RU №2349515 выбрано в качестве прототипа.
Целью предлагаемого изобретения является повышение безопасности космического аппарата при столкновении с высокоскоростными телами техногенного и естественного происхождения за счет фиксации момента столкновения и координат пробоя и автоматической ликвидации последствий столкновения в части разгерметизации корпуса космического аппарата.
Существо предлагаемого изобретения заключается в реализации способа защиты космического аппарата от пробоя высокоскоростными телами за счет использования в корпусе космического аппарата не менее двух поверхностей, одна из которых приводится в управляемое принудительное относительное движение электродвигателями, например, возвратно-поступательное, по двум осям координат, причем зазор между этими поверхностями заполняют герметиком - веществом, твердеющим под воздействием вакуума космического пространства (по терминологии в описании прототипа - смазка).
С помощью системы управления осуществляют контроль координат положения движущей поверхности с фиксацией момента столкновения с высокоскоростным телом (пробоя корпуса КА). Координаты пробоя вводят в память системы управления и запрещают движущейся поверхности занимать это положения совсем или до момента затвердевания герметика в отверстии, пробитом высокоскоростным телом.
Способ сохранения герметичности космического аппарата при столкновении с высокоскоростным телом заключается в относительном перемещении поверхностей корпуса космического аппарата с герметиком между ними, застывающим при низком давлении. Для этого относительное перемещение поверхностей корпуса космического аппарата производят путем приведения в управляемое периодическое движение одной из поверхностей корпуса космического аппарата. В момент нарушения герметичности космического аппарата в результате столкновения с высокоскоростным телом фиксируют координаты положения этой поверхности и накладывают запрет на ее возврат в положение с этими координатами до момента затвердевания герметика в отверстии, пробитом высокоскоростным телом.
Предлагаемый способ по изобретению реализуют с помощью устройства, которое может быть конструктивно выполнено в различных вариантах, зависящих от выбора формы корпуса космического аппарата на основе плоскостей или тел вращения.
При варианте использования в корпусе космического аппарата плоских поверхностей, устройство для реализации способа сохранения герметичности космического аппарата при столкновении с высокоскоростным телом включает корпус космического аппарата с поверхностями, имеющими возможность относительного перемещения, с зазором между ними, заполненным герметиком. Одна из поверхностей корпуса космического аппарата выполнена неподвижной и не менее одной плоской поверхности выполнены подвижной, оснащенной приводом с электродвигателями возвратно-поступательного движения, которые через блок управления двигателями подключены к системе управления, связанной с датчиками координат текущего положения подвижной поверхности, датчиками разгерметизации космического аппарата и регистратором времени.
При варианте использования в корпусе космического аппарата поверхностей в виде тел вращения, устройство для реализации способа сохранения герметичности космического аппарата при столкновении с высокоскоростным телом включает корпус космического аппарата с поверхностями, имеющими возможность относительного перемещения с зазором между ними, заполненным герметиком. Одна из поверхностей корпуса космического аппарата выполнена неподвижной и не менее одной цилиндрической поверхности выполнены подвижной, оснащенной приводом с электродвигателями возвратно-поступательного движения и возвратно-реверсивного вращения, которые через блок управления двигателями подключены к системе управления, связанной с датчиками координат текущего положения подвижной поверхности, датчиками разгерметизации космического аппарата и регистратором времени.
При варианте использования в корпусе космического аппарата поверхностей в виде части сферического тела, устройство для реализации способа сохранения герметичности космического аппарата при столкновении с высокоскоростным телом включает корпус космического аппарата с поверхностями, имеющими возможность относительного перемещения с зазором между ними, заполненным герметиком. Одна из поверхностей корпуса космического аппарата выполнена неподвижной и не менее одной сферической поверхности выполнены подвижной, оснащенной приводом с электродвигателем возвратно-реверсивного вращения, который через блок управления двигателями подключен к системе управления, связанной с датчиками координат текущего положения подвижной поверхности, датчиками разгерметизации космического аппарата и регистратором времени. Зазор между поверхностями, заполненный герметиком, в устройствах, реализующих предлагаемый способ в различных вариантах, соединен через подпитывающий насос с баллоном резервного запаса герметика.
Движущую поверхность выполняют подобной неподвижной поверхности, которую задают по конструктивным соображениям в вариантах различной формы, преимущественно в форме плоскости или тела вращения.
Возможны варианты относительного движения поверхности: по двум координатам, по одной координате, по координате и оси вращения, по оси вращения.
При компоновке проектируемого космического аппарата выбирают вариант обеспечения относительного движения поверхностей корпуса космического аппарата: в одном варианте в движение приводят внутреннюю поверхность, в другом варианте в движение приводят наружную поверхность.
С помощью системы управления обеспечивают различные режимы движения движущейся поверхности, изменяемые в зависимости от опасности столкновения с высокоскоростным телом и с учетом необходимости соблюдения режима экономии электроэнергии.
При повышении опасности столкновения движущую поверхность приводят в более интенсивное движение. При отсутствии опасности уменьшают движение вплоть до остановки электродвигателей. Режимы движения движущейся поверхности задают как постоянный или периодический, с различной частотой, амплитудой движения, или только при реакции на пробой.
При попадании высокоскоростного тела в корпус космического аппарата система контроля пробоя регистрирует момент времени пробоя Тп. Система управления по данным датчиков координат движущейся поверхности, регистрирует координаты положения движущейся поверхности, в момент времени пробоя запоминает (Тп, Хп, Yп) и меняет программу движения движущейся поверхности таким образом, чтобы она не занимала положение в области этих координат до момента, определяемого характеристиками герметика по затвердеванию в вакууме или, в режиме полного запрета, занимать это положение на все время.
Корпус космического аппарата компонуют из набора поверхностей различной формы: в виде плоскости или тела вращения. При возможности прогнозирования движения опасных для столкновения высокоскоростных тел или их раннего обнаружения изготовляют участок корпуса космического аппарата с поверхностями по предлагаемому способу, усиленным по прочности и изменяют ориентацию космического аппарата масс так, чтобы этот участок воспринимал столкновение с высокоскоростным телом.
Существо изобретения иллюстрируют следующие рисунки.
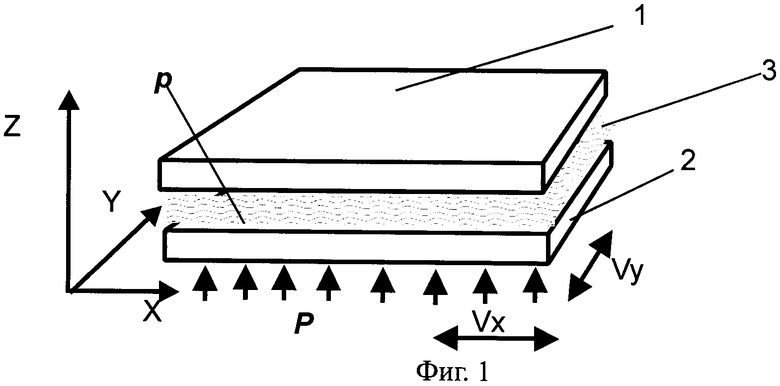
Фиг.1 - принцип действия способа - наличие поверхностей корпуса космического аппарата с относительным перемещением.
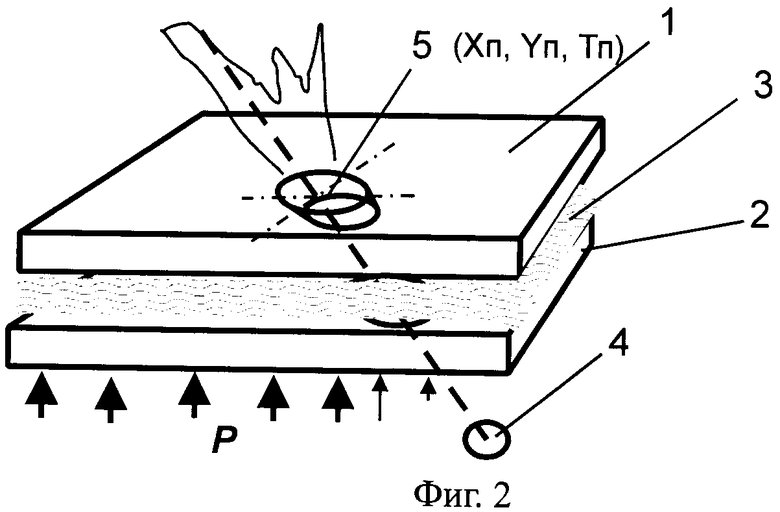
Фиг.2 - столкновение с высокоскоростной микрочастицей - пробой корпуса.
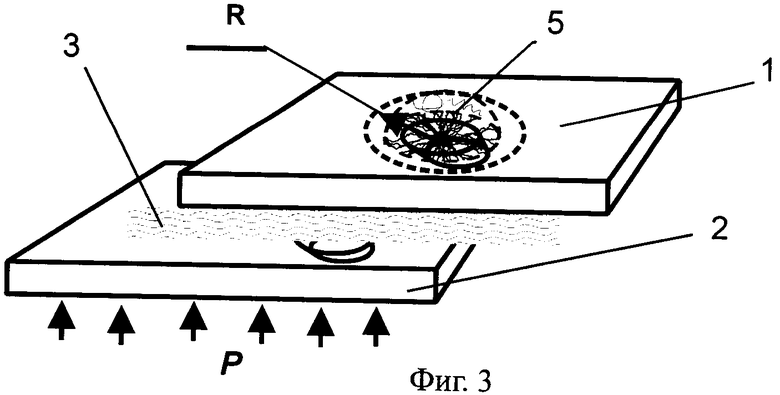
Фиг.3 - относительный сдвиг поверхностей корпуса космического аппарата и ликвидация пробоя.
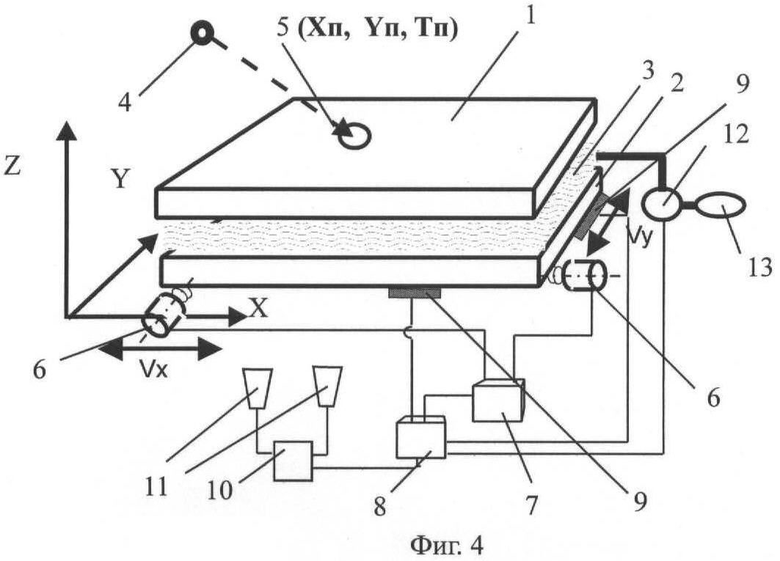
Фиг.4 - схема устройства для реализации способа (вариант поверхностей корпуса космического аппарата в виде плоскостей).
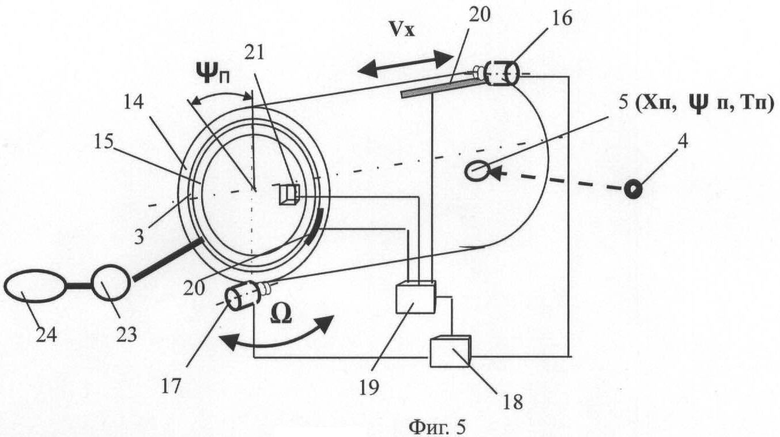
Фиг.5 - схема устройства для реализации способа (вариант поверхностей корпуса космического аппарата в виде цилиндрической поверхности).
Фиг.6 - фрагмент устройства корпуса космического аппарата с неподвижной поверхностью, оснащенной полкам с гибкими раздвижными прокладками.
Фиг.7 - схема устройства для реализации способа (вариант корпуса космического аппарата в виде сферической поверхности).
На фиг.1-3 показан принцип действия предлагаемого способа. Отличительным признаком способа является приведение поверхностей космического аппарата в принудительное периодическое относительное перемещение. Например, на фиг.1 наружная поверхность 1 неподвижна, а внутреннюю поверхность 2 приводят в возвратно-поступательное движение Vх и Vу, в режиме, задаваемом системой управления. Зазор между поверхностями заполнен герметиком 3 с давлением р. Внутреннее давление в отсеке космического аппарата равно Р.
На фиг.2 показан момент столкновения космического аппарата с высокоскоростным телом 4, пробивающим поверхности корпуса (отверстие 5) и вызывающим разгерметизацию отсека космического аппарата с падением давления Р - пробой корпуса.
На фиг.3 показан сдвиг движущейся поверхности и запрет на возвращение ее в положение в момент пробоя с координатами Хп, Yп, в момент времени Тп, или точнее в круговую область радиуса R с центром Хп, Yп. Величина радиуса R зависит от показателя текучести герметика и давления в нем. Герметик, вытекающий в космическое пространство, затвердевает в пробитом отверстии и восстанавливает герметизацию отсека космического аппарата.
Предлагаемый способ реализуют с помощью устройства космического аппарата (фиг.4), которое включает, в данном варианте, поверхности в виде плоскости с возможностью относительного принудительного управляемого движения, например, одна из которых неподвижная 1 (например, наружная), а другая поверхность подвижная 2 (например, внутренняя). Зазор между неподвижной и подвижной поверхностями заполнен герметиком 3 - веществом, обладающим способностью затвердевать при низком давлении (по терминологии описания прототипа - смазкой).
Подвижная поверхность 2 соединена с приводом в движение электродвигателями 6 (в данном варианте по осям Х и Y), которые электрически связаны с блоком управления электродвигателями 7. Блок управления электродвигателями связан с системой управления 8. Система управления имеет счетчик времени и связана с датчиками координат движущей поверхности 9 по осям Х и Y, например, координатными линейками, и системой регистрации разгерметизации отсека космического аппарата 10, которая включает, например, датчики давления 11 внутри отсека и высокоскоростную схему обработки информации по их показаниям.
Система управления 8 электрически связана с системой обеспечения режима герметика, которая содержит подпитывающий насос 12 (например плунжерный), который обеспечивает необходимое давление герметика р в зазоре между поверхностями и подает герметик для компенсации израсходованного на потери при пробое из баллона 13 резервного запаса герметика. В некоторых вариантах система обеспечения режима герметика включает систему регулирования температуры герметика.
Система управления оснащена программным обеспечением решения задачи управления движением поверхности движения с различными режимами и оценки необходимости их выбора и переключения.
На фигуре 5 показан вариант корпуса космического аппарата, выполненного в виде тела вращения, при котором наружная 14 и внутренняя подвижная 15 поверхности выполнены, соответственно в виде тел вращения. При этом подвижная поверхность соединена с приводом в движение электродвигателями 16 возвратно-поступательного движения по оси Х и возвратно-реверсивного вращения 17 вокруг оси корпуса, которые электрически связаны с блоком управления электродвигателями 18. Блок управления электродвигателями связан с системой управления 19. Система управления имеет регистратор времени и связана с датчиками координат движущей поверхности 20 по оси Х и по углу вращения 21, например, координатными линейками, и системой регистрации разгерметизации отсека космического аппарата 22, которая включает, например, датчики давления внутри отсека и высокоскоростную схему обработки информации по их показаниям. Показаны высокоскоростное тело столкновения 4 и отверстие пробоя 5 в момент времени Тп с координатами Хп, Ψп.
Система управления, как и в предыдущем варианте, электрически связана с системой обеспечения режима герметика, которая содержит подпитывающий насос 23 (например, плунжерный), который обеспечивает необходимое давление герметика в зазоре между поверхностями и подает герметик для компенсации израсходованного на потери при пробое из баллона 24 резервного запаса герметика. В некоторых вариантах система обеспечения режима герметика включает систему регулирования температуры герметика.
Система управления оснащена программным обеспечением решения задачи управления движением поверхности движения с различными режимами и оценки необходимости их выбора и переключения.
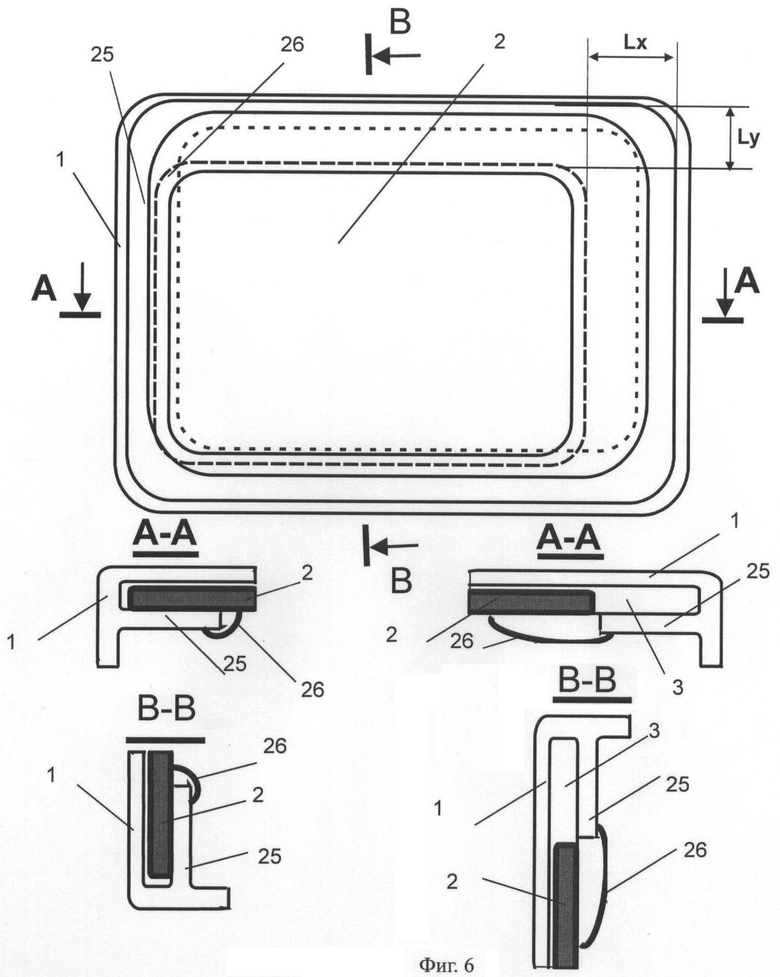
Реализация устройства с поверхностями, приводимыми в линейное перемещение, имеет конструктивные особенности, которые заключаются в необходимости обеспечения сдвига края движущейся поверхности с защитой полости (зазора между поверхностями), заполненной герметиком.
На фиг.6 показан вариант устройства корпуса космического аппарата с подвижной поверхностью 2, которую перемещают по осям Х и Y на величину Lх и Lу, неподвижной поверхностью 1, оснащенной полкой 25 с гибкой раздвижной прокладкой 26 и герметиком 3 в зазоре между поверхностями.
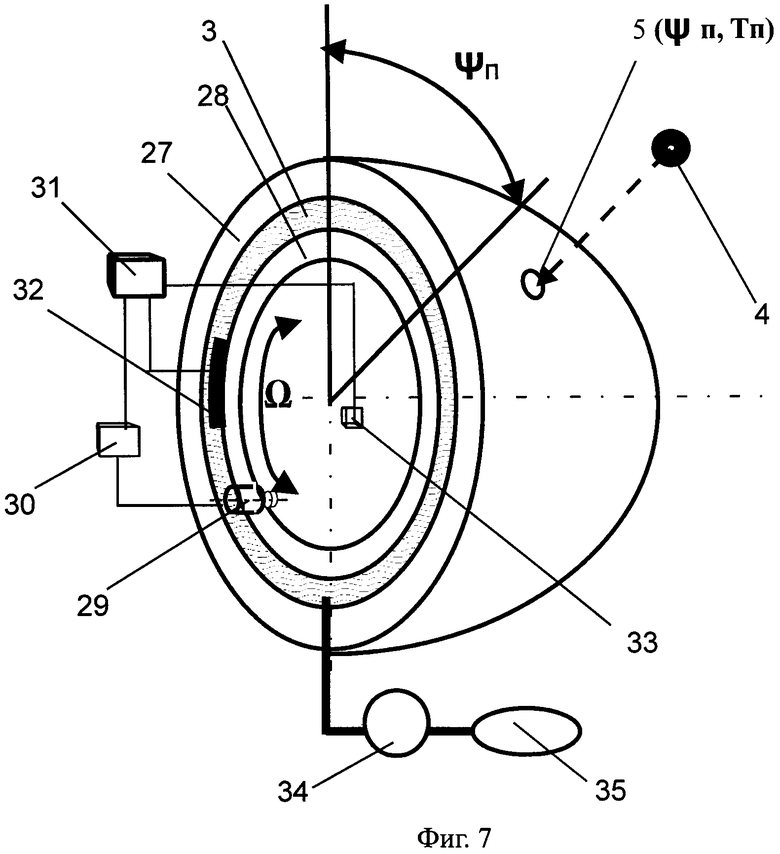
На фигуре 7 показан вариант корпуса космического аппарата, выполненного в виде части сферического тела вращения, при котором наружная 27 и внутренняя подвижная 28 поверхности выполнены, соответственно, в виде частей подобных сферических тел вращения. При этом подвижная поверхность соединена с приводом в движение электродвигателем 29 возвратно-реверсивного вращения вокруг оси корпуса, который электрически связан с блоком управления электродвигателями 30. Блок управления электродвигателями связан с системой управления 31. Система управления имеет регистратор времени и связана с датчиками координат движущей поверхности 32 по углу вращения Ψ, например координатной линейки, и системой регистрации разгерметизации отсека космического аппарата 33.
Система управления, как и в предыдущих вариантах, электрически связана с системой обеспечения режима герметика 3, которая содержит подпитывающий насос 34, который обеспечивает необходимое давление герметика в зазоре между поверхностями и подает герметик для компенсации израсходованного на потери при пробое из баллона 35 резервного запаса герметика. В некоторых вариантах система обеспечения режима герметика включает систему регулирования температуры герметика.
Система управления оснащена программным обеспечением решения задачи управления движением поверхности движения с различными режимами и оценки необходимости их выбора и переключения.
Техническим эффектом при применении предлагаемого способа является повышение безопасности полетов космических аппаратов и надежности реализации их функций в условиях опасности столкновения с высокоскоростными телами. Автоматическая ликвидация разгерметизации отсека космического аппарата дает возможность увеличить шансы устранения повреждений внутри отсека космического аппарата, полученных от столкновения с высокоскоростным телом.
При использовании многослойной оболочки корпуса космического аппарата, то есть при увеличении числа поверхностей корпуса космического аппарата, принудительно приводимых в относительное движение, эффект автоматической ликвидации разгерметизации космического аппарата при столкновении с микрочастицей будет усилен.
Предлагаемый способ автоматической ликвидации разгерметизации космического аппарата позволяет создать устройство, которое сохраняет свою работоспособность при множественных столкновениях с высокоскоростными телами (космическим мусором, микрометеоритами массой до 4-5 грамм), обеспечивая сохранение функциональных качеств космического аппарата, что дает возможность увеличить срок его активного существования.
Изобретения относятся к области ракетно-космической техники и могут быть использованы для обеспечения безопасности и надежности космических аппаратов при воздействии на них высокоскоростных тел естественного или искусственного происхождения. Корпус космического аппарата (КА) состоит из не менее двух поверхностей с управляемым относительным перемещением и расположенного между ними герметика, застывающего в вакууме. Одна из плоскостей приводится в движение электродвигателями и регулируется автоматической системой контроля координат. При обнаружении нарушения герметичности система фиксирует этот момент времени, координаты положения поверхностей и накладывает запрет на возврат поверхности в эти координаты до момента затвердения герметика. Изобретения позволяют устранить повреждения внутри отсека КА, повысить безопасность полетов и надежность реализации функций в условиях опасности множественных столкновений с высокоскоростными микрочастицами и увеличить срок активного существования КА. 4 н. и 3 з.п. ф-лы, 7 ил.
1. Способ сохранения герметичности космического аппарата при столкновении с высокоскоростным телом, заключающийся в относительном перемещении поверхностей корпуса космического аппарата с герметиком между ними, застывающим при низком давлении, отличающийся тем, что относительное перемещение поверхностей корпуса космического аппарата производят путем приведения в управляемое периодическое движение одной из поверхностей корпуса космического аппарата, при этом в момент нарушения герметичности космического аппарата в результате столкновения с высокоскоростным телом фиксируют координаты положения этой поверхности и накладывают запрет на ее возврат в положение с этими координатами до момента затвердевания герметика в отверстии, пробитом высокоскоростным телом.
2. Устройство для реализации способа сохранения герметичности космического аппарата при столкновении с высокоскоростным телом, включающее корпус космического аппарата с поверхностями, имеющими возможность относительного перемещения с зазором между ними, заполненным герметиком, отличающееся тем, что в нем выполнены одна из поверхностей корпуса космического аппарата неподвижной и не менее одной плоской поверхности подвижной, оснащенной приводом с электродвигателями возвратно-поступательного движения, которые через блок управления двигателями подключены к системе управления, связанной с датчиками координат текущего положения подвижной поверхности, датчиками разгерметизации космического аппарата и регистратором времени.
3. Устройство по п.2, отличающееся тем, что зазор между поверхностями, заполненный герметиком, соединен через подпитывающий насос с баллоном резервного запаса герметика.
4. Устройство для реализации способа сохранения герметичности космического аппарата при столкновении с высокоскоростным телом, включающее корпус космического аппарата с поверхностями, имеющими возможность относительного перемещения с зазором между ними, заполненным герметиком, отличающееся тем, что в нем выполнены одна из поверхностей корпуса космического аппарата неподвижной и не менее одной цилиндрической поверхности подвижной, оснащенной приводом с электродвигателями возвратно-поступательного движения и возвратно-реверсивного вращения, которые через блок управления двигателями подключены к системе управления, связанной с датчиками координат текущего положения подвижной поверхности, датчиками разгерметизации космического аппарата и регистратором времени.
5. Устройство по п.4, отличающееся тем, что зазор между поверхностями, заполненный герметиком, соединен через подпитывающий насос с баллоном резервного запаса герметика.
6. Устройство для реализации способа сохранения герметичности космического аппарата при столкновении с высокоскоростным телом, включающее корпус космического аппарата с поверхностями, имеющими возможность относительного перемещения с зазором между ними, заполненным герметиком, отличающееся тем, что в нем выполнены одна из поверхностей корпуса космического аппарата неподвижной и не менее одной сферической поверхности подвижной, оснащенной приводом с электродвигателем возвратно-реверсивного вращения, который через блок управления двигателями подключен к системе управления, связанной с датчиками координат текущего положения подвижной поверхности, датчиками разгерметизации космического аппарата и регистратором времени.
7. Устройство по п.6, отличающееся тем, что зазор между поверхностями, заполненный герметиком, соединен через подпитывающий насос с баллоном резервного запаса герметика.
| УСТРОЙСТВО ДЛЯ СОХРАНЕНИЯ ГЕРМЕТИЧНОСТИ ОБОЛОЧКИ КОСМИЧЕСКИХ АППАРАТОВ ПРИ СТОЛКНОВЕНИИ С ВЫСОКОСКОРОСТНЫМИ ТЕЛАМИ | 2006 |
|
RU2349515C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТА ПРОБОЯ ГЕРМООБОЛОЧКИ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО ОБЪЕКТА КОСМИЧЕСКИМИ ЧАСТИЦАМИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТА ПРОБОЯ | 2008 |
|
RU2387966C1 |
| СПОСОБ КОНТРОЛЯ ГЕРМЕТИЧНОСТИ КОРПУСА КОСМИЧЕСКОГО АППАРАТА НА ОРБИТЕ С ИСПОЛЬЗОВАНИЕМ ВОЛОКНИСТОГО ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА | 2007 |
|
RU2343439C2 |
| US 3666133 A, 30.05.1972 | |||
| JP 6242083 A, 02.09.1994 | |||
| JP 4297400 A, 21.10.1992. | |||

